Notes - media.readthedocs.org · Iblis Lin Nov 21, 2017. Contents 1 Algorithm 3 2 Database 75 3...
185
Notes Release Iblis Lin Nov 21, 2017
Transcript of Notes - media.readthedocs.org · Iblis Lin Nov 21, 2017. Contents 1 Algorithm 3 2 Database 75 3...

NotesRelease
Iblis Lin
Nov 21, 2017


Contents
1 Algorithm 3
2 Database 75
3 FreeBSD 87
4 Linux 97
5 Language 103
6 Math 137
7 Project 151
8 Trading 169
9 Web 175
10 Reading 177
11 Misc 179
12 Indices and tables 181
i

ii

Notes, Release
I’m a programmer, I control your life
Contents 1

Notes, Release
2 Contents

CHAPTER 1
Algorithm
1.1 Clustering
1.1.1 K-Means
n point seperated into k groups.
Init
• k groups
• k data point initial center (seed points)
Meta Algo
For each iteration:
1. recalculate groups center
2. change delegation. For each point, delegate it to the nearest center
Stop rule:
• continuously same delegation twice
• Or, hit the max iteration user assigned
e.g. Assume we have following data set:
1, 2, 3, 4, 11, 12
3

Notes, Release
Iteration
The both action in an iteration can reduce TSSE (total sum of square error).
1. TSSE
2. change delegation |𝑋 − 𝐶𝑛𝑒𝑤| < |𝑋 − 𝐶𝑜𝑟𝑖𝑔|
Convergency
K-mean MUST converge.
Any iteration in this algo will not be repeated. The TSSE is always less then previous.
TSSE𝑛𝑒𝑤 < TSSE𝑜𝑙𝑑
Otherwise, this algo will stop.
∵ TSSE𝑛𝑒𝑤 = TSSE𝑜𝑙𝑑
Pros and Cons
Pros:
• min the TSSE
• workload relative light
• simple algo, easy to implement
Cons:
• min the TSSE may let us fall into local min, not the global min
• the init points affect the result
• cannot avoid noise (outliner)
e.g. loacl min: 98, 99, 100, 101, 102, 154, 200
Iter 1: k=2, 98, 99, 100, 101, 102, 154, 200 Iter 2: same as 1, stop.
TSSE = 112 + 102 + 92 + 82 + 72 + 452 + 02 = 2440 > 1068
The number 1068 came from 98, 99, ..., 102, 154, 200. So the result from k-means isn’t the global min.
Cluster Center Initialization Algorithm
To solve the init points effect.
• apply k-means to _each_ dimension.
• we use standard distribution to find center for _each_ dimension.
• construct clustering string from each dimension.
4 Chapter 1. Algorithm

Notes, Release
ISO Data
when k-means algo stopped,
1. we can drop the groups which contain mush less elements. (drop outliners)
2. (a) the # of groups too less (e.g. < 0.5*threshold), then split the large groups.
(b) the # of groups too many (e.g > 2*threshold), then merge the similar groups.
(c) else: split; merge
3. restart step 1.
1.1.2 Hierarchical Methods
• Divisive
• Agglomerative
Def Hierarchical Clustering Partitional Clustering
e.g.
• K-Means:
• Peak-climbing:
• Graph
Divisive
At first, there is only one group.
We will pick up a group and divide it in following step.
e.g.
init1, 3, 5, 6, 78, 79, 96, 97, 98step11, 3, 5, 6, |, 78, 79, 96, 97, 98step21, 3, |, 5, 678, 79, |, 97, 98
step3 ... etc
Agglomerative
At first, each point form a cluster.
∴ n point ≥ n clusters.
Then, we will merge the most similar two clusters via following step.
∴ clusters− 1
Distance between Two Clusters
Assume we have two clusters – cluster𝐴cluster𝐵 .
1.1. Clustering 5

Notes, Release
Definition 1: Centroid
𝐷(𝐴,𝐵) = ‖𝑎− 𝑏‖
where 𝑎 =
∑∈𝐴
|𝑎|
𝑏 =
∑∈𝐵
|𝑏|
Definition 2: Min Distance
𝐷𝑚𝑖𝑛(𝐴,𝐵) = 𝑚𝑖𝑛(‖− ‖)
where ∈ 𝐴, ∈ 𝐵𝐶𝑜𝑚𝑝𝑙𝑒𝑥𝑖𝑡𝑦 : Ω(𝑛2)
Note that only 𝐷𝑚𝑖𝑛 has Chaining Effect.
Definition 3: Max Distance
𝐷𝑚𝑎𝑥(𝐴,𝐵) = 𝑚𝑎𝑥(‖− ‖)
where ∈ 𝐴, ∈ 𝐵𝐶𝑜𝑚𝑝𝑙𝑒𝑥𝑖𝑡𝑦 : Ω(𝑛2)
Definition 4: Average Distance
𝐷𝑎𝑣𝑒𝑟𝑎𝑔𝑒(𝐴,𝐵) =
∑∈𝐴∈𝐵‖− ‖
|𝐴| × |𝐵|
Definition 5: Ward’s Distance
𝐷𝑊𝑎𝑟𝑑(𝐴,𝐵) =
√2|𝐴||𝐵||𝐴|+ |𝐵|
× |𝑎− 𝑏|
When we merge two cluster into one, the TSSE will rise. Ward suggests that picking up the merging of mini TSSErise.
Wishart turned Ward’s theorem into formula.
We can consider this formula as:
(a coefficient related to size of clusters)× (centroid distance)
6 Chapter 1. Algorithm

Notes, Release
Distance Matrix
Assume there is a n-by-n matrix 𝐴𝑛×𝑛.
𝑥1 𝑥2 . . . 𝑥𝑛𝑥1 0 𝑑12 . . . 𝑑1𝑛𝑥2 𝑑21 0 . . . 𝑑2𝑛...
......
. . ....
𝑥𝑛 𝑑𝑛1 𝑑𝑛2 . . . 0
It’s a symmetric matrix.
∵ 𝑑12 = 𝑑21 = |𝑥2 − 𝑥1|
∴ Ω(𝑛2)
Update Formula of Agglomerative Method
A, B merge R (𝑅 = 𝐴 ∪𝐵).
Calculate 𝐷(𝑅,𝑄),∀𝑄 = 𝐴 and 𝑄 = 𝐵
For reducing cpu time, we have update formula.
Assume |𝐴| = 70, |𝐵| = 30
∴ |𝑅| = 100
𝑟 =70
70 + 30𝑎+
30
70 + 30𝑏
where 𝑟, 𝑎, 𝑏 is the centroid.
Min Distance
Let 𝐷 = 𝐷𝑚𝑖𝑛
Then, 𝐷𝑚𝑖𝑛(𝑅,𝑄) = 𝑚𝑖𝑛(𝐷𝑚𝑖𝑛(𝐴,𝑄), 𝐷𝑚𝑖𝑛(𝐵,𝑄))
Max Distance
𝐷𝑚𝑎𝑥 will same as 𝐷𝑚𝑖𝑛:
𝐷𝑚𝑎𝑥(𝑅,𝑄) = 𝑚𝑎𝑥(𝐷𝑚𝑎𝑥(𝐴,𝑄), 𝐷𝑚𝑎𝑥(𝐵,𝑄))
1.1. Clustering 7

Notes, Release
Average Distance
𝐷𝑎𝑣𝑒𝑟𝑎𝑔𝑒(𝑅,𝑄) =∑∈𝑅𝑞∈𝑄
‖𝑟 − 𝑞‖|𝑅| × |𝑄|
, where 𝑟, 𝑞 is centroid
By def
=1
|𝑅| × |𝑄|(∑∈𝐴𝑞∈𝑄
‖− ‖+∑∈𝐵𝑞∈𝑄
‖𝑏− ‖)
=|𝐴||𝑅|
( 1
|𝑄| × |𝐴|∑∈𝐴𝑞∈𝑄
‖− ‖)
+|𝐵||𝑅|
( 1
|𝑄| × |𝐵|∑∈𝐵𝑞∈𝑄
‖𝑏− ‖)
=|𝐴||𝑅|
𝐷𝑎𝑣𝑒𝑟𝑎𝑔𝑒(𝐴,𝑄) +|𝐵||𝑅|
𝐷𝑎𝑣𝑒𝑟𝑎𝑔𝑒(𝐵,𝑄)
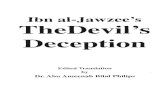
Centroid Distance
𝐷𝑐𝑒𝑛𝑡𝑟𝑜𝑖𝑑
Fact 1: 1746, Steward proof that
𝑛
𝑚+ 𝑛𝑙2 +
𝑚
𝑚+ 𝑛𝑡2 = 𝑠2 +𝑚𝑛
Proof that 𝑇 = −
8 Chapter 1. Algorithm
Notes, Release
∴ 𝑡2 = ‖ − ‖2
= ‖‖2 + ‖‖2 − 2‖‖‖‖
= ‖‖2 + ‖‖2 − 2‖‖‖‖ cos 𝜃𝑙2
= 𝑠2 +𝑚2 − 2𝑠𝑚 cos (𝜋 − 𝜃)= 𝑠2 +𝑚2 + 2𝑠𝑚 cos 𝜃Also, ∵ 𝐴 ∪𝐵
= 𝑅 ∴ 𝑟 =|𝐴||𝑅|
+|𝐵||𝑅|
consider weighted average
= +|𝐵||𝑅|
(− ) ∴ (𝑟 − )
=|𝐵||𝑅|
(− )(𝑟 ∈ 𝑎𝑏)𝑚
= |𝑟 − |
=|𝐵||𝑅|
(𝑚+ 𝑛)
𝑚
𝑚+ 𝑛=|𝐵||𝑅|
𝑛
𝑚+ 𝑛=
1−𝑚𝑚+ 𝑛
=|𝐴||𝑅|‖𝑆‖2
=𝑛
𝑚+ 𝑛𝑛2 +
𝑚
𝑚+ 𝑛𝑚2 −𝑚𝑛
Update Formula of Divisive
n 2 clusters 2𝑛−22
1.1. Clustering 9

Notes, Release
Agglomerative merge
proof:
x1 x2 x3 ... xnA B B ... A
Consider we encode vector as a binary string.
2𝑛 − 2 ( A or B)
binary complement e.g. AABAA v.s. BBABB
∴ 2𝑛−22
Divisive by Splinter Party
:
Init, cal Distance Matrix
𝑎 𝑏 𝑐 𝑑 𝑒𝑎 0 2 6 10 9𝑏 2 0 5 9 8𝑐 6 5 0 4 5𝑑 10 9 4 0 3𝑒 9 8 5 3 0
• a 6.75
• b
• c
• d
• e
∴ a
𝑎 vs 𝑏, 𝑐, 𝑑, 𝑒
step 2, old cluster
distance to old distance to new 𝛿b (5, 9, 8) = 7.33 2 5.33c 6d 10e 9
∀𝛿 > 0, 𝛿𝑚𝑎𝑥 = 𝑏
∴ 𝑏 leave
∴
𝑎, 𝑏 vs 𝑐, 𝑑, 𝑒
step 3 𝑐, 𝑒, 𝑑 goto step2
10 Chapter 1. Algorithm

Notes, Release
∀𝛿 < 0, then stop.reslut: 𝑎, 𝑏 vs 𝑐, 𝑑, 𝑒
rule diameter
𝐷𝑖𝑚𝑡(𝑎, 𝑏) = 𝑚𝑎𝑥(2) = 2 (1.1)𝐷𝑖𝑚𝑡(𝑐, 𝑑, 𝑒) = 𝑚𝑎𝑥(4, 5, 3) = 5− > split 𝑐, 𝑑, 𝑒(1.2)
diameter < args => Stop or diameter change rate too high => stop
Agglomerative update formula
Distance Matrix
step1 x1, x2 x3 .. xn
x1 x2 x3 x4 x5
x1 x2
Divisive or Agglomerative Distance Matrix : Ω𝑛2
Experiment Suggestion
Hierarchical Method will much slower, if n grows up.
• If # of clusters less, starts from Divisive
• If # of clusters large starts from Agglomerative
1.1.3 Peak-Climbing Method
(Mode-Seeking Method)
User (blocks) . e.g.: 2-dimension -> Q x Q blocks
Valley-Seeking
e.g.: We have data point with 2-dimension, and 𝑄×𝑄 = 6𝑥× 6.
Then, counting the data point located in each blocks.
Table for example:
6 42 11 2 1 037 250 58 10 24 934 200 52 48 120 383 25 19 125 230 972 3 15 122 220 1120 5 7 52 190 46
∀ blocks, it has 8 neighbor. Find the max of neighbor.
if max(neighbor) > self, then neighbor
neighbor local max (cluster center)
p.s. cluster Peak
blocks number => 1 => local max
high-dimension e.g.: 5-dimension 35 − 1 = 243 neighbor
1.1. Clustering 11

Notes, Release
1.1.4 Graph-Theoretical Method
Tree: vertix neighbor loop
Definition Inconsistent Edge overlineAB
overlineAB A B Edge
Inconsistent Edge A B clusters
Neighborhood 2
Average_A = Neighborhood/ # of Neighborhood V_A = A
e.g AB - Average_A / Var_A ~= 22
Edge normail distribution 1% Edge z >= 3
Inconsistent
• AB Inconsistent
• Neighborhood
• threshold
– AB - Average_A | >= threshold
– AB | / Average_A
Minimal Spanning Tree (MST)
Tree edge
vecx_1 .. vecx_n MST
1. (e.g. A) A A Tree T_1
2. forall k = 2, 3, 4... T_k from T_k-1 by add (one of the) shortest edge from a node not in T_k-1 such thatT_k is still connected.
Complexity: theata n^2
therefore
MST MST edge inconsistency = - | AB - Avg_A | / Var_A > threshold
AB - Abg_B | / Var_B > threshold
inconsistency inconsistency
therefore connected graph disconnected graph
1980 - Gabriel Graph - Relative Neighborhood Graph - D DT
MST touching data
Definition of Gabriel Graph
for x_1, ... x_n
x_i, x_j
Disk(x_1, x_j)
12 Chapter 1. Algorithm

Notes, Release
overlinex_i x_j
x_i - x_j | ^2 < | x_i - x_k | ^2 + | x_j - x_k | ^2, forall k != i, j
ref: ‘https://en.wikipedia.org/wiki/Gabriel_graph‘_
Definition of Relative Graph
x_i x_j | overlinex_i x_j |
Lune Lune x_k, x_i x_j
overlinex_i x_j in Relative Graph <=> | x_i - x_j | < Max | x_i - x_k | , | x_j - x_k | , forall k != i, j
• Lune Disk
therefore Lune Disk
therefore overlinex_i x_j Relative Graph edge, Gabriel Graph Edge
therefore Edge_RNG C Edge_Gabriel
•
Delaunay Triamgles
\ x1 /\ /\ /
x2 | x3||
Voronoi Diagram
Delaunay
Def x_i x_j (cell_i and cell_j) (e.g. cell_i and cell_j neighbor), overlinex_i, x_j
DT edge >> Gabriel Graph # of edge >= RNG >= MST
Voronoi Diagram for data point vecx_1 ... e.g. vecx_1 vecx_2
Each data point (cell_i) forall vecy in cell_i, | vecy - vecx_i | <= | vecy - vecx_j | forall j = 1 dots n (j != i)
Clustering via Graph Method
( vecx_1 ... vecx_2 ) inconsistency inconsistent edge,
e.g.
data point:
1.1. Clustering 13

Notes, Release
(1, 1)(1, 2)(1, 3)(2, 1)(2, 2)(2, 3)(3, 1)(3, 2)(3, 3)
(4, 4)(4, 6)(4, 8)(6, 4)(6, 6)(6, 8)(8, 4)(8, 6)(8, 8)
• MST break overline(3, 3) (4, 4)
1.1.5 Fuzzy Clustering
Fuzzy clustering hard clustering (crispy clustering)
e.g. k-means, hierarchical, peak-climbing... hard clustering
Definition
Fuzzy clustering
e.g.
A point:
• 0.4
• 0.4
• 0.2
B point: - 0.3 - ...
data structure’s detail hard clustering information
Fuzzy K-means
AKA. Fuzzy C-means, F.C.M
1973 Bezdek paper
x_1, ..., x_n K
let v_j | j=1...k k cluster centroid
q > 1
u_ij i _j
14 Chapter 1. Algorithm

Notes, Release
therefore u_i1 + ... + u_ik = 100%
min sum (u_ij)^q | vecx_i - vecv_j | ^2 , i=1...n, k=1...k
ps. tradictional K-means:
min sum i=1...N | vecx_i vecv_j | ^2 , vecv_j vecx_i cluster centroid
therefore K-means F.K.M : u_ij = 0 or 1
min ( partial ... / partial ... = 0)
Algo(F.K.M)
1. k , vecj , j=1...k
#. update membership coeffiecent u_ij = [ | vecx_i - vecv_j | ^-2 ] ^(1/q-1) / suml=1..k[ | vecx_i -vecl | ^-2] ^(1-/q-1)
•
• 1/(q-1) fuzzy
1. update centroid vecv_j^new = (sumi=1...n(u_ij)^q times vecx_j) / sumi=1..n(u_ij)^q
Max | u_ij - u_ij^last run | < threshold => stop
q > 1 will make F.K.M converge. q 1 Fuzzy
e.g. let q = 1 + 1/1000, therefore 1/(q-1) = 1000
Assume | x_i - v_1 | = 1/sqrt50 | x_i - v_2 | = 1/sqrt49 | x_i - v_3 | = 1/sqrt48
u_i1 = 50^1000 / (50^1000 + 49^1000 + 48^1000) = 99.99...% u_i2 = 49^1000 / ‘’ = 10^-9 u_i3 = 48^1000 / ‘’ =10^-18
therefore x_i v_1 v_2 v_3 winner takes all
1973 Bezdek q = 2
Note: Fuzzy K-means local min
1.1.6 Monothetic Clustering
v.s. Ploythetic Clusttering Clustering poly,
e.g k-means, MST, Hierarchical
Monothetic
e.g.
Q1. Q2. ...
binary string 2^50 ~= 10^15 = 14
True False e.g. <= 15000 m
(e.g. ) Ans 1 e.g. cm / m
Ans 1 e.g. < 100 cm & >= 100 cm
1.1. Clustering 15

Notes, Release
Topic: for
Max Association Sum
Def Association Measure between variable x and y M(x, y) = | ( (1, 1) times (0, 0) ) - ( .. (1, 0) - (0, 1) .. ) |
e.g. table on e3
M(x, y) = | 2 times 2 - 2 times 2 | = 0 , low association
M(r, s) = | 4 times 2 - 2 times 0 | = 8, high association
Ans : e.g. | 6 times 1 - 1 times 1 | = 5 e.g. | (n/2) times (n/2) - 0 times 0 | = n^2 / 4
: 1. M_ij forall i,j
2. Sum_x = sumtheta != xM_xtheta = M_xy + Mxz + ... Sum_y = sumM_ytheta
3. Max Association Sum
e.g. y = v_2 , Sum_y
8 v_2 = 1 v_2 = 0
Then v1, v3, v4, v5, v6 table, Max Sum (a new iteration)
1.1.7 Analytical Clustering
Moment-Preserving
3-dim: google scholar Ja-Chen Lin, Real-time and automatic two-class clustering by analytical formulas
k clusters => p_1, p_2, ... p_k & x_1 x_2 ... x_k because 2k , therefore 2k
p_1 + p_2 + ... + p_k = 100% p_1 x_1 + p_2 x_2 + ... + p_k x_k = overlinex p_1 x_1^2k -1 + ... + p_x x_k^2k- 1 = overlinex^2k - 1
ps. k > 4 (by Galoi’s ), computer approximation
2-dim IEEE PAMI
Principal Axis(PA) of vecx_i_1 ^3000
Definition PA of (x_i, y_i)_i (overlinex, overliney)
2-dim vecx_A vecx_B vecx_A .. 3000 x p_A vecx_B .. 3000 x p_B PA vecx_A vecx_B PA
because p_A theta_a + p_B theta_B = overlinetheta therefore p_A theta_A + p_B (theta_A = pi) = overlinetheta
because p_B pi = overlinetheta - (p_a + p_b) theta_A p_A
proof
P_A X_A + P_B X_B = barX = 0
therefore P_A X_A = - P_B x_B also bary = 0
P_A Y_A = - P_B Y_B
P_A^2 X_A^2 = P_B^2 X_B^2 .. (1) P_A^2 Y_A^2 = P_B^2 Y_B^2 .. (2)
(1) + (2) = P_A^2(X_A^2 + Y_A^2) = P_B^2(Y_A^2 + Y_B^2) P_A^2 r_A^2 = P_B^2 r_B^2
P_A r_A = P_B r_B
P_A r_A + P_B r_B = barr
2 P_A r_A = 2 P_B r_B = barr
16 Chapter 1. Algorithm

Notes, Release
r_B = 0.5 barr / P_B
r_A = 0.5 barr / P_A
k-means when k=2 initial
1. Fast, without iterations
2. No initial
3. Automatic
How to setup Equetions
1-dim: no need to memory answer 2-dim: need 3-dim: the only one using r
1.1.8 Vector Quantization
If we want to transfer 10000 vector data
𝑥1, 𝑥2, . . . , 𝑥10000
∀ is high-dimension (e.g. 16-dim).
Problem
How to speed up the data transfer? If we can accept error; we can accept losely transfer.
Solution
We can use VQ for data compression.
First, we can cluster vectors into 8 clusters. Then we get 8 centroid.
Thus, we only need to transfer 𝑐𝑒𝑛𝑡𝑟𝑜𝑖𝑑0, . . . , 𝑐𝑒𝑛𝑡𝑟𝑜𝑖𝑑7 and 10,000 numbers which represent the cluster belongsto.
And, ∀ 10,000 numbers, it only 3 bits to transfer (000 - 111).
Results
This method will get high transfer speed, but the error is quite larger.
Note: This 8 cluster centroids are so-called codebook. Each centroid is a codeword (codevector).
Codebook Generation
The commonly used Linde-Buzo-Gray (LBG) algorithm to create codebook.
In fact, it is k-means.
1.1. Clustering 17

Notes, Release
Conclusion
• If centroid come from known public data, then your vector data called Outside Data.(Data may irrelavent tocentroid)
• If codebook is generated from data, we call them Inside Data. Then, the error will be lower, but the transfer costraises.
e.g.: Assume we use our own codebook
• Data –> clustering –> 8 clusters
• Data –> classification –> more near to which cluster
Side-Matched VQ (SMVQ)
Goal To provide better visual image quality than original VQ.
• Porposed by Kim in 1992
Seed Block
5124 = 128 4× 4 blocks 128 + 128 - 1 = 255 blocks seed blocks
seed block VQ codeword seed blocks
Example
(512 x 512) 2-by-2 codebook 256 codewords (8bit for index)
codewords:
0. 0 0 0 0
1. 1 1 1 1
. . .
255. 255 255 255 255
Compression algorithm:
step 1. seed blocks, VQ index file (in-place)
step 2. 250 x 250 blocks
-4 44 4
+ - -3 3 | x y3 3 | z w
find
|𝑥− 4|+ |𝑦 − 4|+ |𝑥− 3|+ |𝑧 − 3|()codewords33443344
18 Chapter 1. Algorithm

Notes, Release
original photo codeword
Disscusion
• “classical blocks” more => the quality of image raise
1.1.9 K-Modes
Category Data (Non-numerical )
1998, K-Modes
Mode
e.g. n = 5 , vecx_1 ... vecx_5 k = 2 given x_1 = (alpha, big) = x_4
x_3 = x_5 (beta, mid) x_2 = (beta, small)
Init
z_A = x_1 = (alpha, big) z_B = x_2 = (beta, small)
Iteration 1
1. x_3 to B cluster (because z_A z_B ) x_4 to A; x_5 to B
2. update centroid z_A = Mode x_1 = (alpha, big) = x_4 = (alpha, big) z_B = Mode (beta, small), (beta,mid), (meta, mid) = (beta, mid)
Iteration 2
1. A = x_1, x_4, B = x_2, x_3, x_5
2. update centroid z_A = (alpha, big) z_B = (beta, small) Stop!
ps.
A =
x_1 = (1, 1, ) x_2 = (1, 1, ) x_3 = (1, 1, )
B =
x_4 = (1, 1, ) x_5 = (2, 1, ) x_6 = (1, 2, )
Mode z_A (1, 1, ), Mode z_B = (1, 1, )
x_7 = (1, 1, )
2007, IEEE-T-PAMI “On the impact of Dissimilarity Measure”
e.g. for A
dots | dim 1 | dim 2 | dim 3 |1 | 3 | 3 | 1 |
| | | 1 || | | 1 || | | 0 || | | 0 |
1.1. Clustering 19

Notes, Release
for B
1 | 2 | 2 |2 | 1 | 1 |
diff measurement for (x_7, z_A) = (1 - (3 ) / 3) + (1- 3/3) + 1 = 1
(x_7, z_A) = (1- 2/3) + (1 - 2/3) + 1 = 1.6666
therefore x_7 A
Example
47 soybean data ( ) 35-dim 21-dim ( 14-dim )
4 - D_1: 10 point - D_2: 10 - D_3: 10 - D_4: 17
100 initials
| k-mods | 2007 |Accurarcy | 82.6% | 91.32% |Precision | 88.1% | 95.0% |
ps. e.g A class 130 : 110 20
B class 150 120 30
Accurarcy = frac110 + 120130 + 150
Precision_A = A , A
= frac110110 + 30 (: A )
Precision_B = frac120120 + 20
Recall Rate_A = frac110130
Better Initials for K-mods
Pattern Reconition Leter, vol 23 2002
: n point k clusters
let J = fracnk * 0.1 ~ 0.5
data random sub-sample J subset of data
abbr. CM = Cluster Modes abbr. FM = Finer Modes (Better Modes)
Input: k, J, data Output: k Modes
Step 1: sub-sampling. Initially set CMU = Then, for i = 1...j do (A) and (B)
1. for subset S_i of Data, randomly S_i modes, k-modes
Let CM_i k modes
2. CMU CM_i Union
20 Chapter 1. Algorithm

Notes, Release
Step 2: Refinement For i = 1 ... J do CM_i CMU k clusters, FM_i
Step 3: Selection FM_i CMU i.e (Total Distortion )
Then, output best FM_i
Experiment
Accurarcy | Better initail method | Random initial |98% | 14 | 5 |94% | | 2 |89% | | 2 |77% | | 3 |70% | 5 | 0 |
68% | 0 sampling | 5 |66% | 1 | 3 |
ROCK Method
1.1.10 Fast Methods to Find Nearest Cluster Centers
e.g. k-means or VQ
Definition 𝑘 = # of clusters = codebook size codebook = 𝑦1, . . . , 𝑦𝑛
Definition = (𝑥1, ..., 𝑥16) 16
Goal .. math:
min \| \vecy_i - \vecx \| ^2=min [ \sum_j = 1^16 (y_ij - x_j)^2 ],i = 1, 2, .\dots, 128
centroid e.g. 𝑦1𝑦2
𝑑2(𝑐𝑢𝑟𝑟𝑒𝑛𝑡)𝑚𝑖𝑛 = ‖− 𝑦𝑐𝑢𝑟𝑟𝑒𝑛𝑡𝑚𝑖𝑛 ‖2 = 𝑚𝑖𝑛‖− 𝑦𝑙‖2, 𝑦𝑙 ∈
𝑦𝑖 ‖𝑦𝑖 − ‖2 ?
Partial Distance Elimination
1985 PDE Method
𝐼𝑓(𝑦𝑖1 − 𝑥1)2 + (𝑦𝑖2 − 𝑥2)2 + (𝑦𝑖3 − 𝑥3)2 > 𝑑2(𝑐𝑢𝑟𝑟𝑒𝑛𝑡)𝑚𝑖𝑛
1.1. Clustering 21

Notes, Release
TIE Method
Pre-Processing: O(k^2) = 128x127/2 = C^n_2
Main:
‖𝑦𝑖 − 𝑦𝑐𝑢𝑟𝑟𝑒𝑛𝑡𝑚𝑖𝑛 ‖ >= 2𝑑𝑐𝑢𝑟𝑟𝑒𝑛𝑡𝑚𝑖𝑛
𝑦𝑖
Proof
_\vecx//
/\vecy^current_min\\\ \vecy_i
‖𝑦𝑖 − ‖ >= |‖𝑦𝑖 − 𝑦𝑐𝑢𝑟𝑟𝑒𝑛𝑡𝑚𝑖𝑛 ‖ − ‖ 𝑦𝑐𝑢𝑟𝑟𝑒𝑛𝑡𝑚𝑖𝑛 − ‖| = | >= 2𝑑𝑐𝑢𝑟𝑟𝑒𝑛𝑡𝑚𝑖𝑛 − 𝑑𝑐𝑢𝑟𝑚𝑖𝑛| >= (2− 1)𝑑𝑐𝑢𝑟𝑚𝑖𝑛 = ‖ 𝑦𝑐𝑢𝑟𝑚𝑖𝑛 − ‖
IEEE-T-Com
1994 Torres & Huguel
>= 0
𝐼𝑓‖‖2 + ‖𝑦𝑖‖2 − 2(𝑦𝑖)𝑚𝑎𝑥(
16∑1
𝑥𝑗) >= 𝑑2𝑐𝑢𝑟𝑚𝑖𝑛
𝑜𝑟
𝐼𝑓‖‖2 + ‖𝑦𝑖‖2 − 2()𝑚𝑎𝑥(
1∑6𝑗=1𝑦𝑖𝑗) >= ”
𝑤ℎ𝑒𝑟𝑒𝑋𝑚𝑎𝑥 = 𝑚𝑎𝑥𝑥1, 𝑥2, , 𝑥16 = ‖‖𝑖𝑛𝑓𝑖𝑛𝑖𝑡𝑤ℎ𝑒𝑟𝑒3𝑥128𝑧ℎ𝑖
vecy_i vecy^cur_min
Fast Kick-out by an Inequality
IEEE-T-C.S.V.T 2000 K.S. Wu
‖− 𝑦𝑖‖2 = (𝑥− 𝑦𝑖)(𝑥− 𝑦𝑖) = ‖𝑥‖2 + ‖𝑦𝑖‖2 − 2𝑥𝑖
𝑙𝑒𝑡𝑑2(𝑥, 𝑦𝑖) = ‖𝑥− 𝑦𝑖‖ − ‖𝑥‖2
Now
𝑑2(𝑥, 𝑦𝑖) = ‖𝑥− 𝑦𝑖‖2 − ‖𝑥‖2 = (𝑥− 𝑦𝑖)(𝑥− 𝑦𝑖)− ‖𝑥‖2 = ‖𝑦𝑖‖2 − 2𝑥𝑖 >= ‖𝑦𝑖‖2 − 2‖𝑥‖‖𝑦‖ = ‖𝑦𝑖‖(‖𝑦𝑖‖ − 2‖𝑥‖)
∴ 𝑖𝑓‖𝑦𝑖‖(‖𝑦𝑖‖ − 2‖𝑥‖) >= 𝑑2(𝑐𝑢𝑟𝑟𝑒𝑛𝑡)𝑚𝑖𝑛
𝑑2(𝑥, 𝑦𝑖) >= ‖𝑦𝑖‖(‖𝑦𝑖‖ − 2‖𝑥‖) >= 𝑑2(𝑐𝑢𝑟𝑟𝑒𝑛𝑡)𝑚𝑖𝑛 (𝑑𝑒𝑓𝑖𝑛𝑒𝑎𝑠‖𝑥− 𝑦𝑐𝑢𝑟𝑟𝑒𝑛𝑡𝑖 𝑚𝑖𝑛‖2 − ‖𝑥‖2)
∴ 𝑦𝑖𝑦𝑐𝑢𝑟𝑟𝑒𝑛𝑡𝑚𝑖𝑛 𝑥
22 Chapter 1. Algorithm

Notes, Release
Implementation
sort vecy_1 ... vecy_128
|y_1| <= | y_2 | <= ... <= |y_128|
Goal x y_i
Step 1 2 |x|, y_init y^current_min
let telda d^2_min = telda d^2(x, y_init)
let remaining set R = y_init centroid
Step 2
1. if R is empty set, the y^current_min is the answer; R y_i
2. |y_i| (|y_i| - 2 |x|) >= telda d^2_min, case i.
|y_i| >= |x| y_l | l>=i, goto step 2a
case ii. <= <= , goto step 2a
3. telda d (x, y_i) R y_i, telda d^2 (x, y_i) >= telda d^2_min, goto 2a
4. Let d^2_min = telda d^2(x, y_i) Let y^current_min = y_i goto step 2a
Step 2b case i and ii
∵ ‖𝑦𝑙‖(‖𝑦𝑙‖ − 2‖𝑥‖) >= ‖𝑦𝑖‖(‖𝑦𝑖‖ − 2‖𝑥‖) >= 𝑑2𝑚𝑖𝑛
∵ 𝑓(𝑡) = 𝑡(𝑡− 2‖𝑥‖) = 𝑡2 − 2‖𝑥‖𝑡𝑡 = ‖𝑥‖
Conclusion
| | 1994 | 1995 | Inequality |
• 512x512 4-by-4 VQ
Codebook Size Full Search Inequality128 30 s 4.5 5.3 1.89256 73 8 14.37 4.15512 146 13.7 27.24 7.23
1.1.11 Eliminate Noise via Hierar. Agglom. Method
Hierar Agglom D_centroid Noise
Problem If a pixel whose Grey Level is 𝑥, 0 <= 𝑥 <= 255 and the Grey Levle of 8 neighbor pixels is:
22 23 24239 x 235238 237 236
1. 8 neighbor Hierar Agglom e.g. A = 22, 23, 24, barA = 23.0 B = 235, 236, 237, 238, barB = 237.0threshold merge
2. Then, if ‖𝑥−𝐴‖ = ‖𝑥− 23.0‖ < 𝑡ℎ𝑟𝑒𝑠ℎ𝑜𝑙𝑑𝑁𝑜𝑖𝑠𝑒, x A cluster therefore x B cluster
3. If | x - barA | > threshold_Noise and | x - barB > threshold_Noise, x therefore x is noise therefore x
1.1. Clustering 23

Notes, Release
()
therefore Score 22 is |A| = 3
23 is |A|+1 = 3 + 1 = 4 24 is |A| = 3
Score 235 is |B| + 1 = 5 + 1 236 is |B| = 5 237 is |B| + 1 = 6 238 is |B| = 5 239 is |B| + 1 = 5 + 1
therefore Score_A = 3 + 4 + 3 = 10 Score_B = 6 + 5 + 6 + 5 + 6 = 28 therefore x in B, i.e 237
: T_Hierar = 25, T_Noise = 36
RMS = | Original - New |
RMS = 11 < Mediam Filter RMS = 19 < K-Means Filter RMS = 21
1.1.12 Clustering Aggregation by Probability Accumenulation
Wang, Yang, Zhou P.R. 2009 Vol 42 page. 668-675
𝑥1 . . . 𝑥𝑛 for each is m-dimension
~ c^(1) ... c^(9) 9
Step 1: Component Matrix [A]^(P), P = 1 ... 9
A^(P)_ii = 1, forall i = 1 ... n
/- 0, if x_i x_j in C(P)
A^(P)_ij = - frac11 + ( x_i, x_j )^(1/m)
Step 2
barA = P association = frac19 sum^9_P=1 [A]^(P)
Step 3 Then, transform barA into distance matrix
d(x_i, x_j) = 1 - barA(x_i, x_j) = 1 - barA_ij
Step 4 Hierar Merge( D_min)
big jump of distance
Exp
x_1 ... x_9 1-dim (e.g. k-means, k=3, )
exp 1:
• A cluster x_1, x_2
• B cluster x_3, x_4
• C cluster x_5, x_6, x_7
exp 2:
• A cluster x_1, x_3
• B cluster x_2, x_4, x_5
• C cluster x_6, x_7
24 Chapter 1. Algorithm

Notes, Release
7,7 association matrix barA
2𝐴 = (𝑒𝑥𝑝)
| x_1 x_2 | x_3 x_4 | x_5 x_6 x_7 |x_1 | 1/(1+2) | 1/(1+2)x_2 | | (exp2)
x_3 | | 1/3 |x_4 | |
x_5 | | | 1/(1+3) 1/(1+3)x_6 |x_7 |
1 - barA
1−𝐴 = ...
Step 4: Hierar Merge e.g. x_1, x_3, x_4 vs x_5 vsx_6, x_7
half rings | 400 + 100 point | 2D
Iris | 50 + 50 + 50 point | 4| 100 point (10 clusters) | 64-dim| 683 (2 clusters) | 9-dim
Wine | 178 (3 cluster) | 13-dimGlass | 214 (6) | 9
Pre-processing Normalize Data mean = 0, var = 1 3
exp: run 10 times or 50 times exps, forall Data set k-means, k 10~30 e.g. 100~638 point , avg 349 point, squrt(349)= 19)
IEEE-T-PAMI 2005 “Evidence Accumulation” (EA)
2002 CE
Error Rate pre-processing
| EA | CE | PA |
2 half rings | 0 | 25.42 | 0 |3 rings | 0.8% | 49 | 0 |
1.1. Clustering 25

Notes, Release
| 5.7% | 24 | 8.6 |Iris | 33 | 33 | 33 |
| 65 || 30 |
average | 34 |
Conclusion
Pre-Processing data:
P.A 10% error rate
PA(2009) EA(2005)
• pre-proc, 3%
• pre-proc, 2%
PA CE(2002)
• pre-proc, 12%
• pre-proc, 19%
1.2 Cryptography
1.2.1 Chapter 2: Symmetric Cipher
A.k.a
• conventional encryption
• single key encryption
plaintext plaintext ciphertext encryption decryption
cryptanalysis encryption / decryption Area of “breaking the code”.
cryptology cryptography + cryptanalysis
Symmetric Cipher Model
1. Plaintext
2. Encryption Algorithm
3. Secret key: encryption algorithm input
4. Ciphertext: algo output
5. Decryption Algorithm
1. Encryption algorithm ciphertext decryption secret key plaintext ciphertext secret key
2. Sender receiver share secret key
26 Chapter 1. Algorithm

Notes, Release
secret key algorithm algorithm
Cryptography
1. Operations substitution reversible substitution product systems
2. Key shared key symmetric sender / receiver key asymmetric
3. Plaintext
• block cipher
• stream cipher
Cryptanalysis attack
• Ciphertext only
• Known plaintext
– plaintext-ciphertext pair(s)
• Chosen plaintext
• Chosen ciphertext
• Chose Text
• unconditional secure
–
• computational secure
– cost plaintext
– computation
* DES: 56 bits
* triple DES: 168 bits
* AES: 128 bits
Substitution Techniques
Substitution and transposition
Caesar Cipher
𝐸(𝑘, 𝑝) = (𝑝+ 𝑘) mod 26
𝐷(𝑘, 𝑐) = (𝑝− 𝑐) mod 26
Key space 25
1.2. Cryptography 27

Notes, Release
Monoalphabetic Cipher
Caesar Cipher permutation key space 26!
cryptanalysis e.g. ciphertext frequency table ciphertext
Playfair Cipher
Multiletter cipher
Hill Cipher
Multiletter cipher
= 𝑝𝐾𝑚𝑜𝑑26𝑝 = 𝐾−1𝑚𝑜𝑑26
Vigenere Cipher
Let 𝑘𝑖 key 𝑗 (shift j) Caesar Cipher
𝑐𝑖 = (𝑝𝑖 + 𝑘𝑖𝑚𝑜𝑑𝑚)𝑚𝑜𝑑26𝑝𝑖 = (𝑐𝑖 − 𝑘𝑖𝑚𝑜𝑑𝑚)𝑚𝑜𝑑26
key repeat plaintext
E.g.:
key = hellohellohemsg = magic numberc = ...
julia> caesar(k, p) = Char((Int(p) - Int('a') + Int(k) - Int('a')) % 26 + Int('a'))caesar (generic function with 1 method)
julia> map(x->caesar(x...), zip(key, msg))12-element ArrayChar,1:'t''e''r''t''q''[''r''f''x''p''l''v'
Vernam Cipher
binary data cryptanalysis frequency table
𝑐𝑖 = 𝑝𝑖𝑘𝑖𝑝𝑖 = 𝑐𝑖𝑘𝑖
(xor)
28 Chapter 1. Algorithm

Notes, Release
One-Time Pad
Improve Vernam Cipher.
Random key plaintext repeat
key message cryptanalysis
perfect secrecy
Transposition Techniques
permutation
Rail Fence
msg: meet me after the party
m e m a t r h p r ye t e f e t e a t
transposition cipher frequency plaintext frequency Digram/Trigram table
Rotor Machine
1.2.2 Chapter 4: Number Theory
Groups
𝐺, ·set binary operation Group
Rings
𝑅,+,×set addition operator multiplication operation
Fields
𝐹,+,×set addition operator multiplication operation axioms
Note: integer set field multiplication inverse
3 13
13 integer set
E.g.
•
•
1.2. Cryptography 29

Notes, Release
Finite Fields
cryptography finite field finite field order length(F) 𝑝𝑛, where 𝑝 is a prime, 𝑛 ∈ N.
Galois Field
𝐺𝐹 (𝑝𝑛)
The set with modulo arithmetic operations denote as 𝐺𝐹 (𝑝) = 𝑍𝑛 n prime element multiplication inverse elementn
𝑍𝑝
𝑎, 𝑏𝑏 multiplication inverse extended Euclidean algorithm
𝑎𝑥+ 𝑏𝑦 = 1 = 𝑔𝑐𝑑(𝑎, 𝑏)
[(𝑎𝑥 mod 𝑎) + (𝑏𝑦 mod 𝑎)] mod 𝑎 = 1 mod 𝑎
[0 + (𝑏𝑦 mod 𝑎)] mod 𝑎 = 1
𝑏𝑦 mod 𝑎 = 1
∴ 𝑦 = 𝑏−1 is multiplication inverse of 𝑏.
Polynomial Arithmetic
Ordinary Polynomial Arithmetic
•
• Field N
Finite Fields of 𝐺𝐹 (2𝑛)
8 bits data8 bits 0~255 𝐺𝐹 (28) order 251 8 bits Field 251~255
𝑓(𝑥)𝑚𝑜𝑑𝑚(𝑥) = 𝑚(𝑥)− 𝑓(𝑥)
Generator
generator
(mod order-1)
𝐺(2𝑛) with irreducible polynomial 𝑓(𝑥)
Let 𝑓(𝑥) = 0 generator 𝑔
1.2.3 Chapter 8: More about Number Theory
Fermat’s and Euler’s Theorems
Fermat’s Theorem
𝑝 𝑝 𝑎
30 Chapter 1. Algorithm

Notes, Release
𝑎𝑝−1 mod 𝑝 = 1 ( 1
𝑎𝑝 mod 𝑝 = 𝑎 mod 𝑝
Euler’s Totient Function
𝜑(𝑛)
n n
𝜑(8) = 4
𝜑(37) = 36
𝑝, 𝑞
𝜑(𝑝𝑞) = 𝜑(𝑝)× 𝜑(𝑞) = (𝑝− 1)(𝑞 − 1)
𝜑(21) = 𝜑(3× 7) = 𝜑(3)× 𝜑(7) = (3− 1)(7− 1) = 12
Euler’s Theorem
𝑎, 𝑛
𝑎𝜑(𝑛) ≡ 1( mod 𝑛)
𝑎𝜑(𝑛) mod 𝑛 = 1
alternative form
𝑎𝜑(𝑛)+1 ≡ 𝑎( mod 𝑛)
Testing for Primality
Miller-Rabin Algorithm
property of prime
First property: 𝑝 is a prime, 𝑛 < 𝑝, 𝑛 ∈ N
(𝑎 mod 𝑝)× (𝑎 mod 𝑝) = (𝑎2 mod 𝑝)
Given
𝑎 mod 𝑝 = 1
(or)𝑎 mod 𝑝 = −1
iff
𝑎2 mod 𝑝 = 1
1.2. Cryptography 31

Notes, Release
Discrete Logarithm
Primitive Root
𝑎, 𝑝
𝑎 𝑎𝜑(𝑝)=𝑝−1 ≡ 1( mod 𝑝) 1
𝑎1, 𝑎2, . . . , 𝑎𝑝−1 mod output
primitive root
𝑎 𝑝 primitive root
integer primitive root
Logarithm for Modular Arithmetic
𝑝 primitive root 𝑎
𝑏
𝑏 ≡ 𝑎𝑖( mod 𝑝)
𝑎 primitive root 𝑎𝑖 1, ,𝑝− 1
1.2.4 Hash Functions
Hash function 𝐻 input data 𝑀 output
ℎ = 𝐻(𝑀)
data integrity checksum
Cryptography Hash Functions
• One-way property: computational infeasible to find the data object, given a certain hash. hash hash
• Collision-free property: input data pair hash value
hash functions data integrity
Application of Cryptography Hash Functions
Message Authentication
Alice Bob data Hash values data’ Bob Hash values data integrity
man-in-the-middle-attack
Darth append hash value Bob
Figure 11.3
1. data encryption
2. hash value
32 Chapter 1. Algorithm

Notes, Release
3. data hash value shared key
4. double protection.
Message Authentication Code
A.k.a keyed hash function
shared secret key authentication
Practices: SSL/TLS
𝐸(𝐾,𝐻(𝑀))
• MAC shared secret key
• Chap 12
Digital Signature
1. message sensitive M digital signature Alice sign
2. message sign
Other Hash Functions Uses
• Password saved in DataBases. (One-way password file)
• intrusion detection
• virus detection
• pseudorandom function (PRF) or a pseudorandom number generator (PRNG)
Two Simple Hash Functions
input iteration
insecure
1. n block block bit-by-bit XOR
2. block + circular shift block shift 1 shift 2
Hash functions block collision hash functions XOR
Requirements and Security
Preimage
𝑥 is the preimage of ℎ for a hash values
Collision
If 𝑥 = 𝑦, but 𝐻(𝑥) = 𝐻(𝑦)
Requirements (table 11.1)
1.2. Cryptography 33

Notes, Release
• input
• output
• Efficiency: forward pass
• preimage resistant: one-way.
• Second preimage resistant: weak collision resistant. Given 𝑥 collision (computational infeasible)
• Strong collision resistant: ∀(𝑥, 𝑦) pair, no collision. (computational infeasible)
• Pseudorandomness: hash value pseudorandomness
Attacks
1. Brute-Force
2. Cryptanalysis: attack the algorithm property.
Brute-Force Attacks
m-bit hash value,
hash value ℎ preimage (input) random input input hash value 2𝑚
2𝑚−1
second preimage? 𝑥 ℎ 𝑦, 𝑠.𝑡.𝐻(𝑦) = 𝐻(𝑥) 2𝑚
Collision Resistant: 2𝑚/2 ?
MD4/MD5 -> 128 bit
Cryptanalysis
•
Hash Functions Based on Cipher Block Chaining
11.8 MD4/MD5/SHA-family
SHA
SHA-512
Message block padding
chain result
1.3 DL
1.3.1 Part I
Math basic
34 Chapter 1. Algorithm

Notes, Release
Machine Learning
Problem setting:
1. meta-rule meta-rule e.g. meta-rule meta-rule
2. 𝑥 𝑦 learning optimization
e.g. DNS and cancer
Linear Model
• XOR linear model feature extraction NN
Linear Regression
Multivariate Linear Regression:
ℎ𝜃() = 𝜃𝑇
• MSE cost function
𝐽(𝜃) =1
2𝑚
𝑚∑𝑖
(ℎ𝜃()− 𝑦)2
cost function 𝑋 = 𝑥1, . . . , 𝑥𝑚 data set 𝑋 𝐽(𝜃) data set 𝐽(𝜃) 𝜃
• cost function close form solution, Normal Equation Method GD why ?
– http://stats.stackexchange.com/questions/23128
– inverse matrix 𝑂(𝑛3)
Univariable Linear Regression
• Univariable ->
Assume:
ℎ𝜃0,𝜃1(𝑥) = 𝜃0 + 𝜃1𝑥
The cost function will be:
𝐽(𝜃0, 𝜃1) =1
2𝑚
𝑚∑𝑖
(ℎ𝜃0,𝜃1(𝑥𝑖)− 𝑦𝑖)2
Then, if we simplify ℎ, let 𝜃0 = 0,
𝐽(𝜃1) =1
2𝑚
𝑚∑𝑖
(ℎ𝜃1(𝑥𝑖)− 𝑦𝑖)2 (1.3)
=1
2𝑚
𝑚∑𝑖
(𝜃1𝑥𝑖 − 𝑦𝑖)2(1.4)
Objective function:
𝑎𝑟𝑔min𝜃1
𝐽(𝜃1)
1.3. DL 35

Notes, Release
It looks like this:
This objective function is convex and has a close form solution.
Polynomial Regression
Change linear to higher-order ploynomial model
e.g.
ℎ(𝑥) = 𝜃0 + 𝜃1𝑥1 + 𝜃2𝑥2 + 𝜃3𝑥21 + 𝜃4𝑥
22
Gradian Descent
• learning rate 𝜂 linear regression
– minimum 𝜂 iteration minimum cost function iteration
• Batch Gradian Descent, training set
• http://mccormickml.com/2014/03/04/gradient-descent-derivation/
Logistic Regression
classifcation algo.
outcome
0 ≤ ℎ(𝑥) ≤ 1
36 Chapter 1. Algorithm

Notes, Release
Sigmoid function (logistic function):
𝜎(𝑧) =1
1 + 𝑒−𝑧
Model
ℎ𝜃() = 𝜎(𝜃𝑇 ) (1.5)
=1
1 + 𝑒−𝜃𝑇 (1.6)
Logistic Regression with MSE
If we select MSE as cost function, we will obtain non-convex cost function.
1.3. DL 37

Notes, Release
< 0 local optima > 0 global optima
MSE Logistic Regression
Logistic Regression Cost Function
𝐽(𝜃) =1
𝑚
𝑚∑𝑖
𝐶𝑜𝑠𝑡(ℎ𝜃(𝑥𝑖), 𝑦𝑖)
𝐶𝑜𝑠𝑡(ℎ𝜃(𝑥), 𝑦) =
− log(ℎ𝜃(𝑥)), if 𝑦 = 1
− log(1− ℎ𝜃(𝑥)), if 𝑦 = 0(1.7)
= −𝑦 log(ℎ𝜃(𝑥))− (1− 𝑦) log(1− ℎ𝜃(𝑥))(1.8)
In case of 𝑦 = 1
38 Chapter 1. Algorithm

Notes, Release
ℎ𝜃(𝑥) , ℎ𝜃(𝑥) (0, 1) Domain (0, 1) 0 1 log convex function
In case of 𝑦 = 0
1.3. DL 39

Notes, Release
Differentiation Linear Regression with MSE why?
Normal Equation Method
𝜃 = (𝑋𝑇𝑋)−1𝑋𝑇
Julia code:
pinv(X' * X) * X' * y
Example
(x, y) = (1, 2), (2, 4), (3, 6)
𝑦 = 2𝑥
julia> X = A[:, 1:2]3×2 ArrayInt64,2:1 12 13 1
julia> Y = A[:, 3]3-element ArrayInt64,1:246
40 Chapter 1. Algorithm

Notes, Release
julia> pinv(X' * X) * X' * Y2-element ArrayFloat64,1:2.0-1.02141e-14
or
julia> X \ Y2-element ArrayFloat64,1:2.02.88619e-15
If Non-interible
• pinv vs inv
– pinv – psudo-inverse
causes:
• Redundant feature – linear dependent (?)
– e.g. 𝑥1 = 3𝑥2
– GD cost function 𝐽
• Too many feature
– training data
– linear regression feature 𝜃 parameter Regularization
ReLU
relu(x) = (x > 0) ? x : 0
https://en.wikipedia.org/wiki/Rectifier_(neural_networks)
• low computational cost.
• deep MLP back propagation sigmoid function or tanh layer sigmoid tanh upper / lower bound deepMLP
• ReLU x 0 topology fully connected NN outcome 0 connection
Feature Scaling
Linear Regression: Linear Regression MSE GD feature scale cost function GD Rescaling cost function GD
Mean Normalization
𝑥′ =𝑥− 𝜇
𝑥𝑚𝑎𝑥 − 𝑥𝑚𝑖𝑛
1.3. DL 41

Notes, Release
standard deviation
𝑥′ =𝑥− 𝜇𝜎
model 𝜎, 𝜇
Data
• face detection
– learning
– learn
– learning
– financial data
Learning Rate Selection
Learning rate 𝜂 hyper parameter algo linear regression fixed learning rate GD 𝜂 cost function iteration/epochplotting learning rate
1.3.2 Regularization
• 𝐿0, 𝐿1, 𝐿2 regularization: penalty term loss function
• Data Augmented: data noise model robustness
• Share Weight
• Bigging, boosting
• DropOut: for NN http://cs.nyu.edu/~wanli/dropc/
Single Hidden Layer MLP
Input tuple hidden layer node sample input domain -> label domain space dictionary table table overfitting
(w) generalization
Data Augmented
• Image deformation: noise
– Deep Big Simple Neural Nets Excel on Hand-written Digit Recognition
Share Weight
parameter (or weight in NN context) overfitting CNN
42 Chapter 1. Algorithm

Notes, Release
1.3.3 Autoencoder
Feature extraction: feature representation
Let 𝜑 is encoder.
Let 𝜓 is decoder.
𝜑 = 𝑋 → 𝐹
𝜓 = 𝐹 → 𝑋
Objective function:
𝑎𝑟𝑔min𝜑,𝜓‖𝑋 − 𝜓(𝜑(𝑋))‖2
Undercomplete Autoencoder hidden coding . non-linear undercomplete autoencoder overfittinggenerization
Overcomplete Autoencoder coding
1.4 Evolutionary Neuron Network
1.4.1 Formulating Problem
Elements
• Mapping genotype encoding with a mapping phenotype.
• Fitness function
Representation
• Tree Encoded
• Graph Encoded
Common Algo
There ar four common evolutionary computation (EC) algorithms.
• Genetic Algorithms
• Genetic Programming
• Evolutionary Strategies
• Evolutionary Algorithms
Genetic Algorithms
• string encoding for genotype
1.4. Evolutionary Neuron Network 43

Notes, Release
Genetic Programming
A specialized type of GA without string encoding, but tree based coding for graph problem.
• different mutation operation, like swapping branch of tree.
• length of genotypes in GP can be variable.
Evolutionary Strategies
ES is another variation of simple GA approach. It evolves not only the genotypes but the evolutionary parameters, thestrategy itself.
Evolutionary Algorithms
A specialized algo for evolving the transition table of Finit State Machine.
1.5 Paper
1.5.1 Deep Big Simple Neural Nets Excel on Hand-written Digit Recognition
tag NN, MLP, GPU, training set deformations, MNIST, BP
ref https://arxiv.org/pdf/1003.0358.pdf
dataset MNIST
Data Preproc
Elastic deformation (Elastic distortion) regularization generization
Feature scaling [-1.0, 1.0]
Learning Algo
• On-line BP without momentum (what is momentum on BP?).
• 2 - 9 hidden layers MLP
• Arch descibe in table 1
• learning rate
1.5.2 Tiled convolutional neural networks
ref https://papers.nips.cc/paper/4136-tiled-convolutional-neural-networks.pdf
• “convolutional (tied) weights significantly reduces the number of parameters”
44 Chapter 1. Algorithm

Notes, Release
1.5.3 TODO
• https://arxiv.org/pdf/1103.4487.pdf
1.6 PRML
1.6.1 Introduction
• pattern recognition discover rules, regularities of data.
• Common symbol
– data point
– target vector
– result of ML algo ()
• generalization:
• feature extraction: data pre-processing.
• deal with over-fitting
– Regularization term
–
– Bayesian approach
Regularization
One of technique to control over-fitting. Simply add a penalty term to the error function.
𝐸() = square error + regularization
regularization =𝜆
2‖‖2
w_0, w_0
• L2 Norm
• shrinkage
• Neuro network weight decay
Probability Theorem
• random variable is a function, e.g X, output can be foo or bar.
• Two rules:
– sum rule: Total Probability
– product rule
𝑝(𝑋 = 𝑓𝑜𝑜)− > 0.4; 𝑝(𝑋 = 𝑏𝑎𝑟)− > 0.6.
𝑝(𝑓𝑜𝑜) + 𝑃 (𝑏𝑎𝑟) = 1.
1.6. PRML 45

Notes, Release
Joint Probability
𝑋 𝑌
X a random var, possibile outcome is 𝑎, 𝑏, 𝑐
Y a random var, 𝑓𝑜𝑜, 𝑏𝑎𝑟, 𝑏𝑎𝑧
N total number of trails
𝑛𝑖𝑗 : the number of 𝑋𝑖 + # of 𝑌𝑗
joint probability
𝑝(𝑋 = 𝑥𝑖, 𝑌 = 𝑦𝑗) =𝑛𝑖𝑗𝑁
or
𝑃 (𝑋 ∩ 𝑌 )
e.g.
𝑝(𝑋 = 𝑥𝑎, 𝑌 = 𝑦𝑏𝑎𝑟) =𝑛𝑎−𝑏𝑎𝑟𝑁
a bar 𝑋 𝑌
marginal probability or says sum rule
𝑝(𝑋 = 𝑥𝑖) =∑𝑗
𝑝(𝑋 = 𝑥𝑖, 𝑌 = 𝑦𝑗)
Condition Probability
Given 𝑋 = 𝑥𝑖
𝑝(𝑌 = 𝑦𝑗 |𝑋 = 𝑥𝑖) =𝑛𝑖𝑗𝑛𝑖
Product Rule
𝑝(𝑋 = 𝑥𝑖, 𝑌 = 𝑦𝑗) = 𝑝(𝑌 = 𝑦𝑗 |𝑋 = 𝑥𝑖)𝑝(𝑋 = 𝑥𝑖)
= 𝑝(𝑋 = 𝑥𝑖|𝑌 = 𝑦𝑗)𝑝(𝑌 = 𝑦𝑗)
Bayes’ Theorem
joint probability
𝑝(𝑌 |𝑋) =𝑝(𝑋|𝑌 )𝑝(𝑌 )
𝑝(𝑋)
• const, normalization term 𝑝(𝑦𝑖|𝑋)
∵ 𝑝(𝑋,𝑌 ) = 𝑝(𝑌,𝑋)
𝑝(𝑌 |𝑋)𝑝(𝑋) = 𝑝(𝑋|𝑌 )𝑝(𝑌 )
∴ 𝑝(𝑌 |𝑋) =𝑝(𝑋|𝑌 )𝑝(𝑌 )
𝑝(𝑋)
46 Chapter 1. Algorithm

Notes, Release
Example
𝑋&𝑌 𝑥𝑖 𝑋 𝑌
prior probability ( 𝑥𝑖 ) 𝑌
𝑝(𝑌 )
posterior probability 𝑥𝑖
𝑝(𝑌 |𝑥𝑖)
Likelihood
𝐿𝑖𝑘𝑒𝑙𝑖ℎ𝑜𝑜𝑑 = 𝑝(𝑥𝑖|𝑦𝑗)
𝑥𝑖 Likelihood function 𝑦𝑗 𝑥𝑖
e.g.
𝐿𝑖𝑘𝑒𝑙𝑖ℎ𝑜𝑜𝑑 = 𝑝(| = 10−8)− >
Probability Density
outcome 𝑝(𝑥 ∈ (𝑎, 𝑏))
𝑝(𝑥 ∈ (𝑎, 𝑏)) =
∫ 𝑏
𝑎
𝑝(𝑥)𝑑𝑥
Note: 𝑝(𝑥) probability mass function
Transformation of Probability Densities
𝑥 = 𝑔(𝑦) 𝑥 𝑦
𝑝𝑦(𝑦)𝑑𝑦 = 𝑝𝑥(𝑥)𝑑𝑥 (1.9)
𝑝𝑦(𝑦) = 𝑝𝑥(𝑥)𝑑𝑥
𝑑𝑦(1.10)
= 𝑝𝑥(𝑥)𝑔′(𝑦)(1.11)= 𝑝𝑥(𝑔(𝑦))𝑔′(𝑦)(1.12)
ref: https://www.cl.cam.ac.uk/teaching/2003/Probability/prob11.pdf
Cummulative Distribution Function
𝑝(𝑥) 𝑃 (𝑥) 𝑃 ′(𝑥) 𝑝(𝑥)
𝑃 (𝑧) =
∫ 𝑧
−∞𝑝(𝑥)𝑑𝑥
1.6. PRML 47

Notes, Release
Multi-variable
= [𝑥1, 𝑥2, . . . , 𝑥𝐷] continueous variable
join probability density function:
𝑝() = 𝑝(𝑥1, . . . , 𝑥𝐷)
:
𝑝() ≥ 0∫𝑝()𝑑 = 1
Sum Rule and Product Rule:
𝑝(𝑥) =
∫𝑝(𝑥, 𝑦)𝑑𝑦 (1.13)
𝑝(𝑥, 𝑦) = 𝑝(𝑦|𝑥)𝑝(𝑥)(1.14)
measure theory
Expectation
function 𝑓(𝑥), 𝑓(𝑥) under 𝑝(𝑥)
discrete :
E[𝑓 ] =∑𝑥
𝑝(𝑥)𝑓(𝑥)
continueous :
E[𝑓 ] =
∫𝑝(𝑥)𝑓(𝑥)𝑑𝑥
continueous probability density function N 𝑝(𝑥) 𝑥 :
E[𝑓 ] ≃ 1
𝑁
𝑁∑𝑛=1
𝑓(𝑥𝑛)
multi-variable () 𝑥 y function:
E𝑥[𝑓(𝑥, 𝑦)]
Conditional Expectation
E[𝑓 |𝑦] =∑𝑥
𝑝(𝑥|𝑦)𝑓(𝑥)
Variance
variance of 𝑓(𝑥)
𝑣𝑎𝑟[𝑓 ] = E[(𝑓(𝑥)− E[𝑓(𝑥)])2]
𝑣𝑎𝑙𝑢𝑒−𝑚𝑒𝑎𝑛 mean
48 Chapter 1. Algorithm

Notes, Release
Covariance
random variables 𝑥, 𝑦
𝑐𝑜𝑣[𝑥, 𝑦] = E𝑥,𝑦[𝑥𝑦]− E[𝑥]𝐸[𝑦]
Matrix version:
𝑐𝑜𝑣[𝑋,𝑌 ] = E𝑋,𝑌 [𝑋𝑌 𝑇 ]− E[𝑋]𝐸[𝑌 𝑇 ]
Bayesian Probability
Aka, Subjective Probability.
Bayesian probability e.g.
Curve fitting problem frequentist model parameter 𝑤 uncertainty
prior probability posterior probability
data point 𝒟 = 𝑡1, 𝑡2, . . . , 𝑡𝑛 curve fitting
posterior probability 𝒟
(Event) posterior probability
𝑝(|𝒟) =𝑝(𝒟|)𝑝()
𝑝(𝒟)
right-hand side 𝑝(𝒟|) likelihood function likelihood function hyperparameter 𝒟 probable
posterior ∝ likelihood× prior
function function 𝑝(𝒟) normalization constant 𝑝(|𝒟) sum 1 :∫𝑝(|𝒟)𝑑 =
∫𝑝(𝒟|)𝑝()
𝑝(𝒟)𝑑 (1.15)
⇒ 1 =
∫𝑝(𝒟|)𝑝()
𝑝(𝒟)𝑑 (1.16)
⇒ 1 =1
𝑝(𝒟)
∫𝑝(𝒟|)𝑝()𝑑 (1.17)
⇒ 𝑝(𝒟) =
∫𝑝(𝒟|)𝑝()𝑑 (1.18)
likelihood function 𝑝(𝒟) 𝑝() distribution (uncertainty) frequentist fixed parameter error
maximum likelihood frequentist likelihood function
• ref: https://stats.stackexchange.com/questions/74082/
• ref: https://stats.stackexchange.com/questions/180420/
data set error function outcome
error function likelihood function error function log
maximizing likelihood minimizing error function
1.6. PRML 49

Notes, Release
log ? 𝑝(𝒟|) D 𝑡1, . . . .𝑡𝑛
𝑝(𝐷|) =𝑝(𝐷 = 𝑡1)𝑝(𝐷 = 𝑡2) . . . 𝑝(𝐷 = 𝑡𝑛)
𝑝()
log log function monotonically decreasing function, imply convex, maximum likelihood
Bayesian prior likelihood overfitting 3 head maximum likelihood 𝑝(ℎ𝑒𝑎𝑑) = 1 overfitting Bayesian priormaximum likelihood
frequentist Bayesian Bayesian prior
hyperparameter
model, model parameter hyperparameter.
𝑝(|𝛼), where 𝛼 is the precision of the distribution.
predictive distribution maximum likelihood 𝑤𝑀𝐿 𝛽𝑀𝐿 probabilistic model 𝑥
𝑝(𝑡|𝑥, 𝑤𝑀𝐿, 𝛽𝑀𝐿) = 𝒩 (𝑡|𝑦(𝑥, 𝑤𝑀𝐿), 𝛽−1𝑀𝐿)
Data Sets Bootstrap
frequentist
Original data set 𝑋 = 𝑥1, . . . , 𝑥𝑁
New data set 𝑋𝐵 random sampling with replacement e.g.: 10 original data set 3 10 𝑋𝐵
Curve fitting Re-visited
curve fitting polynomial frequentist maximum likelihood model
Probabilistic perspective target value distribution uncertainty
𝑥 𝑡 gaussian distribution distribution 𝜇 = 𝑦(𝑥, )
curve fitting 𝑦(𝑥, ) , target distribution
distribution
𝑝(𝑡|𝑥, , 𝛽) = 𝒩 (𝑡|𝜇, 𝛽−1)
= 𝒩 (𝑡|𝑦(𝑥, ), 𝛽−1)
Where the precision 𝛽−1 = 𝜎2
training data , maximum likelihood , 𝛽 i.i.d likelihood function
𝑝(𝑡|, , 𝛽) =
𝑁∏𝑛
𝒩 (𝑡𝑛|𝑦(𝑥𝑛, ), 𝛽−1)
Gaussian Function log likelihood form
ln 𝑝(𝑡|, , 𝛽) = −𝛽2
∑(𝑦(𝑥𝑛, )− 𝑡𝑛
)2+𝑁
2ln𝛽 − 𝑁
2𝑙𝑛(2𝜋)
50 Chapter 1. Algorithm

Notes, Release
maximum log likelihood with respect with 𝛽
max−1
2
∑(𝑦(𝑥𝑛, )− 𝑡𝑛
)2⇒
min1
2
𝑁∑𝑛
(𝑦(𝑥𝑛, )− 𝑡𝑛
)2sum-of-square error function sum-of-square error function Gaussian noise distribution maximum likelihood
precision
1
𝛽=
1
𝑁
𝑁∑𝑛
(𝑦(𝑥𝑛, 𝑤𝑀𝐿)− 𝑡𝑛
)2𝑤𝑀𝐿, 𝛽𝑀𝐿 𝑥 predictive distribution
𝑝(𝑡|𝑥, 𝑤𝑀𝐿, 𝛽𝑀𝐿) = 𝒩 (𝑡|𝑦(𝑥, 𝑤𝑀𝐿), 𝛽−1𝑀𝐿)
Bayes’ theorem priorrecall this
𝑝𝑜𝑠𝑡𝑒𝑟𝑖𝑜𝑟 ∝ 𝑙𝑖𝑘𝑒𝑙𝑖ℎ𝑜𝑜𝑑× 𝑝𝑟𝑖𝑜𝑟
model distribution D-dimension Gaussian
𝑝(|𝛼)𝑎 = 𝒩 (|0, 𝛼−1𝐼)
=( 𝛼
2𝜋
)𝑀+12
𝑒−𝛼2
𝑇
where 𝛼 is the precision (𝛼−1 = 𝜎2)
maximum posterior log posterior likelihood exp prior exp
𝛽
2
𝑁∑𝑛
(𝑦(𝑥𝑛, )− 𝑡𝑛
)2+𝛼
2𝑇
=
1
2
𝑁∑𝑛
(𝑦(𝑥𝑛, )− 𝑡𝑛
)2+
𝛼
2𝛽𝑇
=
1
2
𝑁∑𝑛
(𝑦(𝑥𝑛, )− 𝑡𝑛
)2+𝜆
2𝑇
sum-of-square error function with regularization term, given 𝜆 = 𝛼𝛽
prior maximum posterior regularization term over-fitting problem Gaussian distribution
Bayesian curve fitting
prior distribution 𝑝(|𝛼) maximum posterior Bayesian Bayesian product rule and sum rules (marginalization)Bayesian method
1.6. PRML 51

Notes, Release
predictive distribution posterior
𝑝(𝑡|𝑥, , ) = 𝑝(𝑡|𝑥,𝒟) =
∫𝑝(𝑡|𝑥, )𝑝(|𝒟)𝑑
𝛼, 𝛽 hyperparameter 𝑝(|𝒟) posterior
posterior Gaussian predictive distribution Gaussian
𝑝(𝑡|𝑥, , ) = 𝒩 (𝑡|𝑚(𝑥), 𝑠2(𝑥))
𝑚(𝑥), 𝑠2(𝑥)
Model Selection
model order 𝑀 ploynomial model
𝑦 = 𝑝(𝑥)
𝑀 hyperparameter
𝑀 over-fitting
Cross-Validation
over-fitting
data point 100%
• train set
• validation set
• test set
8:2 = (train + validation):test
train + validation 4:1
4:1 case data 5 5 training run run validation set
𝑀 computation 5
Akaike Information Criterion (AIC)
cross-validation
ln 𝑝(𝒟|𝑀𝐿)−𝑀
𝑀 𝑀 max likelihood
Gaussian Distribution
See Gaussian Function
52 Chapter 1. Algorithm

Notes, Release
Decision Theory
Make optimal decisions in situations involving uncertainty (with probability theorem)
input value
target value
joint probability distribution 𝑝(, ) summary of the uncertainty.
inference joint probability distribution inference ( 𝑝(, ) from training data set).
Minimizing the misclassification rate
class 𝐶1, 𝐶2 classification input dataset 𝑋 = 𝑥1, . . . , 𝑥𝑛 data feature vector 𝑥𝑖
objective function minimizing misclassification rate maximizing correct rate
𝑝(𝑚𝑖𝑠𝑡𝑎𝑘𝑒) = 𝑝( ∈ 𝑅1, 𝐶2) + 𝑝( ∈ 𝑅2, 𝐶1)
=
∫𝑅1
𝑝(, 𝐶2)𝑑+
∫𝑅2
𝑝(, 𝐶1)𝑑
Where 𝑅1, 𝑅2 decision region
minimizing decision input 𝑝(, 𝐶1) vs 𝑝(, 𝐶2)
𝑝(𝐶1|)𝑝() vs 𝑝(𝐶2|)𝑝() 𝑝() posterior
misclassification e.g. 4 1 v 2, 3, 4, 2 vs 3, 4, 3 vs 4 maximizing 𝑝(𝑐𝑜𝑟𝑟𝑒𝑐𝑡) 4
𝑝(𝑐𝑜𝑟𝑟𝑒𝑐𝑡) =
4∑𝑘=1
∫𝑅𝑘
𝑝(, 𝐶𝑘)𝑑
Minimizing the expected loss
Type I error vs Type II error loss
e.g.
𝐸(𝐿) =∑𝑘
∑𝑗
∫𝑅𝑗
𝐿𝑘𝑗𝑝(, 𝐶𝑘)𝑑
expected loss
𝐿𝑘𝑗 k j loss 𝑘 = 𝑗 𝐿𝑘𝑗 = 0
input 𝑅𝑗
∑𝑘
𝐿𝑘𝑗𝑝(, 𝐶𝑘)
=∑𝑘
𝐿𝑘𝑗𝑝(𝐶𝑘|)𝑝()
⇒∑𝑗
𝐿𝑘𝑗𝑝(𝐶𝑘|)
1.6. PRML 53
Notes, Release
minimizing 𝑝()
Inference and decision
classification stage:
1. inference: training dataset 𝑝(𝐶𝑘|) model
2. decision: posterior distribution testing class
decision problem
1. class-conditional densities 𝑝(|𝐶𝑘) class k k prior 𝑝(𝐶𝑘) Bayes’ Theorem posterior probabilities
𝑝(𝐶𝑘|) =𝑝(|𝐶𝑘)𝑝(𝐶𝑘)
𝑝()
=𝑝(|𝐶𝑘)𝑝(𝐶𝑘)∑𝑘 𝑝(|𝐶𝑘)𝑝(𝐶𝑘)
model joint distribution 𝑝(𝑥,𝐶𝑘) normalize posterior
posterior probabilities input posterior probabilities class
model input output distribution generative models distribution sampling synthetic data point
2. model 𝑝(𝐶𝑘|) posterior approximator decision stage discriminative models
3. function 𝑓() discriminant function function output class
generative models 𝑝(𝑥) 𝑝(𝑥) new data outlier (outlier detection and novelty detection)
classification posterior discriminative models
discriminant function data function inference decision stage learning problem function function class posterior
posterior
Minimizing risk loss matrix (maybe in financial applications) posterior loss function (objective function) discrim-inant function model training
Reject option posterior threshold 𝜃 posterior
Compensating form class priors unbalance dataset class training dataset 1 : 1000 𝑝𝑜𝑠𝑡𝑒𝑟𝑖𝑜𝑟 ∝ 𝑝𝑟𝑖𝑜𝑟 prior𝑝(𝐶𝑘) training class balance dataset prior 1
𝐾 balance dataset posterior 𝑝𝑜𝑠𝑡𝑒𝑟𝑖𝑜𝑟 ×𝐾 × 𝑜𝑟𝑖𝑔𝑖𝑛𝑎𝑙 𝑝𝑟𝑖𝑜𝑟normalization unbalance training training generalization 1 : 1000
Combining models size e.g. cancer detection input X-ray imgage input vector 𝑥𝐼 , 𝑥𝐵
input vectors independent
𝑝(𝑥𝐼 , 𝑥𝐵 |𝐶𝑘) = 𝑝(𝑥𝐼 |𝐶𝑘)𝑝(𝑥𝐵 |𝐶𝑘)
independentjoint probability conditional independence
posterior:
𝑝(𝐶𝑘|𝑥𝐼 , 𝑥𝐵) ∝ 𝑝(𝑥𝐼 , 𝑥𝐵)𝑝(𝐶𝑘)
∝ 𝑝(𝑥𝐼 |𝐶𝑘)𝑝(𝑥𝐵 |𝐶𝑘)𝑝(𝐶𝑘)
∝ 𝑝(𝑥𝐼 |𝐶𝑘)𝑝(𝐶𝑘)𝑝(𝑥𝐵 |𝐶𝑘)𝑝(𝐶𝑘)
𝑝(𝐶𝑘)
∝ 𝑝(𝐶𝑘|𝑥𝐼)𝑝(𝐶𝑘|𝑥𝐵)
𝑝(𝐶𝑘)
54 Chapter 1. Algorithm

Notes, Release
posterior posterior training data (𝑝(𝐶𝑘)) normalization posterior
naive Bayesian model conditional independent
Loss functions for regression
𝐸(𝐿) =
∫ ∫𝐿(𝑡, 𝑦())𝑝(, 𝑡)𝑑𝑑𝑡∫ ∫
𝑓(·)𝑑𝑑𝑡 𝑑 𝑑𝑡 𝑓(·)
𝐿(𝑡, 𝑦()) = (𝑦()− 𝑡)2 square lose function
𝐸(𝐿) =
∫ ∫(𝑦()− 𝑡)2𝑝(, 𝑡)𝑑𝑑𝑡
minimizing 𝑦(𝑥) (model)
Information Theory
discrete random variable 𝑥 , .
𝑥
probability distribution 𝑝(𝑥) , Monotonic function ℎ(𝑥) x information gain suprise
𝑥, 𝑦 (independent) random variable, ℎ(𝑥, 𝑦) :
ℎ(𝑥, 𝑦) = ℎ(𝑥) + ℎ(𝑦)
:
𝑝(𝑥, 𝑦) = 𝑝(𝑥)𝑝(𝑦)
:
ℎ(𝑥) = − log2 𝑝(𝑥)
ℎ(𝑥) >= 0
𝑥 , :
𝐻(𝑥) =∑𝑥
𝑝(𝑥)ℎ(𝑥)
= −∑𝑥
𝑝(𝑥) log2 𝑝(𝑥)
𝑒𝑛𝑡𝑟𝑜𝑝𝑦
Continueous Var
𝑒𝑛𝑡𝑟𝑜𝑝𝑦 Continueous variable
𝐻() = −∫𝑝() ln 𝑝()𝑑
differential entropy
1.6. PRML 55

Notes, Release
Mutual Information
random variablesdependent
random variables share variable
𝐼(𝑋;𝑌 ) =∑𝑥∈𝑋
∑𝑦∈𝑌
𝑝(𝑥, 𝑦) log( 𝑝(𝑥, 𝑦)
𝑝(𝑥)𝑝(𝑦)
)random variable independent
log( 𝑝(𝑥, 𝑦)
𝑝(𝑥)𝑝(𝑦)
)= log
(𝑝(𝑥)𝑝(𝑦)
𝑝(𝑥)𝑝(𝑦)
)= log 1 = 0
1.6.2 Probability Distributions
density estimation random variable 𝑋 , random variable is a function, 𝑥1, 𝑥2, . . . , 𝑥𝑛 probability distribution 𝑝(𝑋)
Assumption data points i.i.d. (independent and identically distribution)
ill-posed problem density estimation problem ill-posed – probability distribution model selection
parametric distribution distribution data
non-parametric density estimation parametric distribution distribution data set data set
Bernoulli Distribution
state
𝑥 ∈ 0, 1
Let 𝑝(𝑥 = 1|𝜇) = 𝜇
𝑝(𝑥 = 0|𝜇) = 1− 𝜇
distribution
𝐵𝑒𝑟𝑛(𝑥|𝜇) = 𝜇𝑥(1− 𝜇)(1− 𝑥)
∴ 𝐵𝑒𝑟𝑛(𝑥 = 1|𝜇) = 𝜇1(1− 𝜇)0
= 𝜇
∴ 𝐵𝑒𝑟𝑛(𝑥 = 0|𝜇) = 𝜇0(1− 𝜇)1
= (1− 𝜇)
dataset 𝒟 = 𝑥1, . . . , 𝑥𝑛 iid Likelihood function
𝑝(𝒟|𝜇) =
𝑁∏𝑛
𝑝(𝑥𝑛|𝜇)
=
𝑁∏𝑛
𝜇𝑥𝑛(1− 𝜇)(1− 𝑥𝑛)
Then, log likelihood function
ln 𝑝(𝒟|𝜇) =
𝑁∑𝑛
ln 𝑝(𝑥𝑛|𝜇)
=
𝑁∑𝑛
ln(𝜇𝑥𝑛(1− 𝜇)(1− 𝑥𝑛)
)
56 Chapter 1. Algorithm

Notes, Release
maximum likelihood
𝜇𝑀𝐿 =1
𝑁
𝑁∑𝑛
𝑥𝑛
1 average
1.6.3 Classification
Discriminant Function
Two Classes
𝑦(𝑥) = 𝑇𝑥+ 𝑤0
𝑤0 is bias, sometimes a negative 𝑤0 is called threshold
Multiple Classes
problem 3 one-versus-the-rest classifier hyperplane feature space decision boundary boundary 4decision region 3 testing (p183. Figure 4.2)
sol Single K-class discriminant function, K
𝑦𝑘() = 𝑤𝑘𝑇 + 𝑤𝑘0
e.g. 3 𝐶1, 𝐶2, 𝐶3 ⎧⎪⎨⎪⎩𝑦1() = 𝑤1
𝑇 + 𝑤10
𝑦2() = 𝑤2𝑇 + 𝑤20
𝑦3() = 𝑤3𝑇 + 𝑤30
Let ∈ 𝐶𝑘 if 𝑦𝑘 > 𝑦𝑗 ,∀𝑗 = 𝑘
Decision boundary 𝑦𝑘 = 𝑦𝑗 ⎧⎪⎨⎪⎩𝑦1 = 𝑦2
𝑦2 = 𝑦3
𝑦3 = 𝑦1
=⇒
⎧⎪⎨⎪⎩𝑦1 − 𝑦2 = 0
𝑦2 − 𝑦3 = 0
𝑦3 − 𝑦1 = 0
→ (𝑤𝑘 − 𝑤𝑗)𝑇 + (𝑤𝑘0 − 𝑤𝑗0) = 0
Perceptron
Perceptron criterion
1.6. PRML 57

Notes, Release
𝑤𝑇 (𝑥𝑛)𝑡𝑛 > 0
E SGD iter
converge: 𝐸(𝑤(𝑡+ 1)) < 𝐸(𝑤)
(4.57) (4.57) sigmoid function
(4.72) log
Section name
maximum likelihood
4.2.1 why gaussian?
what is share variance?
Discriminative Model
model linear maximum posterior
4.87
logistic function posterior
(4.89) likelihood 𝑦𝑛 posterior
(4.91) cross-entropy (?) entropy (4.91) AKA cross-entropy error function
sigmoid function 𝑑𝜎𝑑𝑎=𝜎(1−𝜎)
IRLS
Newton-Raphon method
( Gradient Descent )
Generative Model and Discriminative Model
• 𝐶𝑘, 𝑘 ∈ 1, 2 output
• 𝑋 ∈ 𝑥1, . . . , 𝑥𝑛 data, input
Naive Bayes classifier Logistic Regression
• Naive Bayes Generative Model
• Logistic Regression Discriminative Model
Naive Bayes classifier
posterior data class 𝑝(𝐶𝑘|𝑋 = 𝑥𝑛+1) posterior
58 Chapter 1. Algorithm

Notes, Release
Build model :
𝑝(𝐶𝑘 = 1|𝑋) =𝑝(𝐶𝑘 = 1, 𝑋)
𝑝(𝑋)
𝑝(𝐶𝑘 = 2|𝑋) =𝑃 (𝐶𝑘 = 2, 𝑋)
𝑝(𝑋)
𝑝(𝑋) model joint probability
𝑝(𝐶𝑘 = 1, 𝑋) = 𝑝(𝑋|𝐶𝑘 = 1)𝑝(𝐶𝑘 = 1)
𝑝(𝐶𝑘 = 2, 𝑋) = 𝑝(𝑋|𝐶𝑘 = 2)𝑝(𝐶𝑘 = 2)
𝑝(𝑋|𝐶𝑘)
𝑝(𝑋|𝐶𝑘 = 1) =
⎧⎪⎨⎪⎩𝑝(𝑋 = 𝑥1|𝐶𝑘 = 1)
. . .
𝑝(𝑋 = 𝑥𝑛|𝐶𝑘 = 1)
𝑝(𝑋|𝐶𝑘 = 2) =
⎧⎪⎨⎪⎩𝑝(𝑋 = 𝑥1|𝐶𝑘 = 2)
. . .
𝑝(𝑋 = 𝑥𝑛|𝐶𝑘 = 2)
Naive Bayes 𝑝(𝑋|𝐶𝑘)
Logistic Regression
model linear model
posterior formula
𝑝(𝐶𝑘 = 1|𝑋) = . . .
𝑝(𝐶𝑘 = 2|𝑋) = . . .
1.6.4 Neural Networks
Raidial Based Function Networks
Gaussian Function
gaussian function 𝛼 = 1
𝛽, 𝛾 𝜇, 𝜎 e.g. k-means 𝜇, 𝜎
𝑘 = 10 RBF neuron vector 𝑘
RBF neuron gaussian function
• input vector 2e.g. (𝑥1, 𝑥2)
• RBF neuron vector 10
• input RBF neuron 10 coding
• RBF output full connected NN
1.6. PRML 59

Notes, Release
1.6.5 Kernel Method
kernel function simularity or covariance(inner product) ... etc.
memory-based method
kernel
homogeneous kernel AKA. radial-basis function
𝑘(‖𝑣𝑒𝑐𝑥− 𝑣𝑒𝑐𝑥′‖)
Dual Representation
Constructing Kernel
model selection
Guassian Kernel (6.23) homogeneous kernel,
Probabilistic generative kernel
𝑘(𝑥, 𝑥′) = 𝑝(𝑥)𝑝(𝑥′)
i
𝑘(𝑥, 𝑥′) =∑𝑥
𝑝(𝑥|𝑖)𝑝(𝑥′|𝑖)𝑝(𝑖)
Fisher Kernel
(6.33)
Radial Basis Fcuntion Network
Guassian Process
Process drichlet process
Regerssion
𝑡𝑛 = 𝑦𝑛 + 𝑒𝑟𝑟𝑜𝑟𝑛
error random variable 𝜇 = 0 Guassian
𝑝(𝑡𝑛|𝑦𝑛) = 𝑁(𝑥𝑛|𝑦𝑛, 𝛽−1)
𝑝(𝑡𝑛+1|𝑡𝑁 )
60 Chapter 1. Algorithm

Notes, Release
1.6.6 Graphical Models
• probabilistic graphical models
probabilistic graphical models node ( vertex ) random variable(s) link ( edage ) graph node joint probability
Quote:
For the purposes of solving inference problems, it is often convenient to convert both directed and undi-rected graphs into a different representation called a factor graph.
Bayesian Network
Aka. Belief Network
Family Directed Graphical Models:
Markov Random Fields
Family Undirected Graphical Models
1.6.7 Misc
1.7 Reinforcement Learning
1.7.1 Overview
agent OR LR approximate dynamic programming ML LR economic (bounded rationality)
ML Markov decision process (MDP), dynamic programming
Reinforcement Learning and Markov Decision Processes
1. supervised learning unsupervised learning
2. sequential decision making problem
3. environment system state actions + states
4. “sequential decision making can be viewed as instances of MDPs.”
5. policy a function maps state into actions.
6. decision making problem * rule base – programming
• search and planning
• probabilistic planning algorithms
• learning
7. Online –
8. Offline – simulator
1.7. Reinforcement Learning 61

Notes, Release
Credit Assignment
training credit contribute credit ?
temporal credit assignment problem
structural credit assignment problem (?) agent policy function e.g. NN params update NN structural creditassignment problem
Exploration-Exploitation Trade-off
Exploration
Exploitation
Performance
• RL performance measurement stochastic, policy update
concept drift
• supervised/unsupervised learning data prior distribution
• subgoals
Markov Decision Process
• stochastic extension of finite automata
• MDP infinite
• key componement
– states
– actions
– transitions
– reward function
States
A finite set 𝑆 = 𝑠1, . . . , 𝑠𝑁
The size of set space is 𝑁 . ‖𝑆‖ = 𝑁
use features to describe a state
Actions
A finite set 𝐴 = 𝑎1, . . . , 𝑎𝐾
‖𝐴‖ = 𝐾
Actions can control the system states.
action state : 𝐴(𝑠)
62 Chapter 1. Algorithm
Notes, Release
action order, global clock 𝑡 = 1, 2, . . .
Transitions
Apply action 𝑎 in a state 𝑠, make a transitions from 𝑠 to new state 𝑠′
Transition function 𝑇 define as 𝑆 ×𝐴× 𝑆 → [0, 1]
Notation: 𝑠, apply 𝑎 action, 𝑠′
𝑇 (𝑠, 𝑎, 𝑠′)
𝑇 , probability distribution over possible next states
() ∑𝑠′∈𝑆
𝑇 (𝑠, 𝑎, 𝑠′) = 1
Reward Function
state reward
𝑅 : 𝑆 → R
𝛾 ∈ [0, 1] discount factor, 𝑠 reward discount
Initial State distribution
Initial state
𝐼 : 𝑆 → [0, 1]
Model
𝑇 𝑅
Task
• finite, fixed horizon task
• infinite horizon task
• continuous task
Policy function
• deterministic policy: mapping
𝜋 : 𝑆 → 𝐴
𝑎 = 𝜋(𝑠)
1.7. Reinforcement Learning 63

Notes, Release
• stochastic policy: 𝑠, 𝑎 output output 𝑎
𝜋 : 𝑆 ×𝐴→ [0, 1]
𝑎 ∼ 𝜋(𝑎|𝑠)
• parameterized policies 𝜋𝜃 𝜋 e.g. NN function approximator output
– deterministic: 𝑎 = 𝜋(𝑠, 𝜃)
– stochastic: 𝑎 ∼ 𝜋(𝑎|𝑠, 𝜃)
process policy function stationary
Optimality
agent rewardaverage or rewards,
optimality process reward , reward sum, discount, process average rewards.
Finite horizon: h ( finite horizon) rewards. h-step optimal action
𝐸[
ℎ∑𝑡=0
𝑟𝑡]
discount finite horizon discount reward:
𝐸[
ℎ∑𝑡=0
𝛾𝑡𝑟𝑡]
Sepcial case of discount finite horizon model: Immediate reward
Let 𝛾 = 0
𝐸[𝑟𝑡]
discount infinite horizon:
𝐸[
∞∑𝑡=0
𝛾𝑡𝑟𝑡]
Value Function
link optimality and policy.
algo learning target:
• value function, aka critic-based algorithms
– Q-Learning
– TD-Learning
• actor-based algorithms
agent state (how good in certain state)
optimality criterion e.g. average rewords “The notion of how good is expressed in terms of an optimality crite-rion, i.e. in terms of the expected return.”
𝜋 hyper parameter? “Value functions are defined for particular policies.”
64 Chapter 1. Algorithm

Notes, Release
input 𝑠 𝜋 “value of a state 𝑠 under policy 𝜋“
𝑉 𝜋(𝑠)
e.g. optimality finite-horizon, discounted model, given policy 𝜋, state 𝑠
𝑉 𝜋(𝑠) = 𝐸𝜋[
ℎ∑𝑘=0
𝛾𝑘𝑟𝑡+𝑘|𝑠𝑡 = 𝑠]
𝑟𝑡+𝑘 𝑡 𝑘
state-action value function 𝑄 : 𝑆 ×𝐴→ R
state 𝑠, 𝜋 𝑎
𝑄𝜋(𝑠, 𝑎) = 𝐸𝜋[
ℎ∑𝑘=0
𝛾𝑘𝑟𝑡+𝑘|𝑠𝑡 = 𝑠, 𝑎𝑡 = 𝑎]
Bellman Equation
Aka. Dynamic Programming Equation
discrete-time
e.g. (𝑣.1) sum Bellman Equation
𝑉 𝜋(𝑠) = 𝐸𝜋[𝑟𝑡 + 𝛾𝑟𝑡+1 + 𝛾2𝑟𝑡+2 + . . . |𝑠𝑡 = 𝑡] (1.19)= 𝐸𝜋[𝑟𝑡 + 𝛾𝑉 𝜋(𝑠𝑡+1)|𝑠𝑡 = 𝑠](1.20)
=∑𝑠′
𝑇 (𝑠, 𝜋(𝑠), 𝑠′)
(𝑅(𝑠, 𝑎, 𝑠′) + 𝛾𝑉 𝜋(𝑠′)
)(1.21)
Expectation transition probabilistic sum Expectation Immediate reward + value of next step
:optimal 𝜋: 𝜋*
:optimal 𝑉 : 𝑉 𝜋*
= 𝑉 *
Bellman optimality equation
𝑉 *(𝑥) = max𝑎∈𝐴
∑𝑠′∈𝑆
𝑇 (𝑠, 𝜋(𝑠), 𝑠′)
(𝑅(𝑠, 𝑎, 𝑠′) + 𝛾𝑉 𝜋(𝑠′)
)
𝜋*(𝑠) = arg max𝑎
∑𝑠′∈𝑆
𝑇 (𝑠, 𝜋(𝑠), 𝑠′)
(𝑅(𝑠, 𝑎, 𝑠′) + 𝛾𝑉 𝜋(𝑠′)
)policy greedy policy deterministic value function best action
optimal state-action value function:
𝑄*(𝑠, 𝑎) =∑𝑠′
𝑇 (𝑠, 𝑎, 𝑠′)
(𝑅(𝑠, 𝑎, 𝑠′) + 𝛾max
𝑎′𝑄*(𝑠′, 𝑎′)
)state-action policy stochastic policy max𝑎′ 𝑄
* 𝑄 next action
∵∑𝑎′∈𝐴
𝜋(𝑠′, 𝑎′) = 1
stochastic
1.7. Reinforcement Learning 65

Notes, Release
Model-based and Model-free
Model model of MDP MDP (𝑆,𝐴, 𝑇,𝑅) 𝑇 𝑅 environment
Model-based algorithms “Model-based algorithms exist under the general name of DP.” DP prioragent env data model model DP Bellman Equation optimal policy
Model-free algorithms “Model-free algorithms, under the general name of RL” model 𝑇, 𝑅 agentpolicy 𝑇, 𝑅
“a simulation of the policy thereby generating samples of state transitions and rewards.”
state-action function (e.g. Q-function)
Q function model-free approach T R model T R method model-free algorithms
“Q-functions are useful because they make the weighted summation over different alternatives (such as inEquation v.1) using the transition function unnecessary. This is the reason that in model-free approaches,i.e. in case T and R are unknown, Q-functions are learned instead of V-functions.”
T R MDP framework policy agent
Relation between 𝑄* and 𝑉 *
𝑉 *(𝑠) = max𝑎
𝑄*(𝑠, 𝑎)
𝑄*(𝑠, 𝑎) =∑𝑠′
𝑇 (𝑠, 𝑎, 𝑠′)
(𝑅(𝑠, 𝑎, 𝑠′) + 𝛾𝑉 *(𝑠′)
)𝜋*(𝑠) = arg max
𝑎𝑄*(𝑠, 𝑎)
Generalized Policy Iteration (GPI)
Two steps:
• policy evaluation: 𝜋 𝑉 𝜋
• policy improvement: state action 𝜋 states action state 𝜋 action
𝑉 𝜋 improve 𝜋 𝜋′
value function policy state case model-free (?)
“Note that it is also possible to have an implicit representation of the policy, which means that only thevalue function is stored, and a policy is computed on-the-fly for each state based on the value functionwhen needed.”
value function
Dynamic Programming
DP model optimal policies “The term DP refers to a class of algorithms that is able to compute optimal policies inthe presence of a perfect model of the environment.”
66 Chapter 1. Algorithm

Notes, Release
Fundamental DP Algorithms
Two core method:
• policy iteration
• value iteration
Policy Iteration
Policy Evaluation stage
decision theorem inference stage stage policy 𝜋
value function 𝑉 𝜋 (given a fixed policy 𝜋).
MDP model 𝑉 𝜋 𝑆. linear programming
iterative Bellman Equation update rule: state 𝑠′ horizon 𝑉 𝜋𝑘 𝑉 𝜋𝑘+1 ← 𝐹 [𝑉𝑘(𝑠′)]
𝑉 𝜋𝑘+1 horizon 𝑘 + 1, 𝑉 𝜋𝑘 𝑘 𝑉 𝜋 infinite-horizon
𝑉 𝜋𝑘+1(𝑠) = 𝐸𝜋[𝑟𝑡 + 𝛾𝑟𝑡+1 + · · ·+ 𝛾𝑘+1𝑟𝑡+𝑘+1]
= 𝐸𝜋[𝑟𝑡 + 𝛾(𝑟𝑡+1 + · · ·+ 𝛾𝑘𝑟𝑡+𝑘+1
)]
= 𝐸𝜋[𝑟𝑡 + 𝛾𝑉 𝜋𝑘 (𝑠′)]
=∑𝑠′
𝑇 (𝑠, 𝜋(𝑠), 𝑠′)(𝑅(𝑠, 𝜋(𝑠), 𝑠′) + 𝛾𝑉 𝜋𝑘 (𝑠′)
)iteration 𝑘, 𝑘 = 1 : inf 𝑘 DP
iteration 𝑘 iter 𝑠 𝑠 full backup transition probabilities
general formulation backup operator 𝐵𝜋 over 𝜑 𝜑 map state space e.g. 𝜑 value function
(𝐵𝜋𝜑)(𝑠) =∑𝑠′∈𝑆
𝑇 (𝑠, 𝜋(𝑠), 𝑠′)(𝑅(𝑠, 𝜋(𝑠), 𝑠′) + 𝛾𝜑(𝑠′)
)optimal value function 𝑉 *objective function
𝑉 * = arg max𝑉
∑𝑠∈𝑆′
𝑉 (𝑠)
s.t.∀𝑎,∀𝑠, 𝑉 (𝑠) ≥ (𝐵𝑎𝑉 )(𝑠)
𝐵𝑎𝑉 action
Policy Improvement stage
policy, s.t. 𝑉 𝜋1(𝑠) ≥ 𝑉 𝜋0(𝑠),∀𝑠 ∈ 𝑆
𝜋0 policy e.g ...etc
Pseudo code:
k = 1 # horizonpi[1] = ... # baseline policy
while not converge
1.7. Reinforcement Learning 67

Notes, Release
# policy evaluationfor s in S
pi[k, ...] = ...end
# policy improvementfor s in S
pi[k+1, ...] = indmax(...)end
k += 1end
Updating style
Sync A.k.a Jacobi-style table
In-place
Async extend of in-place, but in any order.
Modified policy iteration (MPI)
Two steps:
• policy evaluation
• policy improvement
It’s general method of async update
Heuristics and Search
Heuristics general async DP
Goal-based reward function goal state positive reward
RL
Model-free MDP with approximation and incomplete information sampling exploration
transition model prior reword function prior
model-free
• transition and reward models model DP indircet RL or model-based RL
• direct RL action value model
• “For example, one can still do model-free estimation of action values, but use an approximated model tospeed up value learning by using this model to perform more, and in addition, full backups of values(see Section 1.7.3).”“
68 Chapter 1. Algorithm

Notes, Release
Temporal Difference Learning
TD learning episode update value 30 update
TD algo bootstrapping
TD(0)
policy function 𝜋 𝑉 𝜋 online RL
𝑉𝑘+1(𝑠)← 𝑉𝑘(𝑠) + 𝛼(𝑟 + 𝛾𝑉𝑘(𝑠′)− 𝑉𝑘(𝑠))
𝛼 learning rate
Note: learning rate 𝛼 fixed s’ s’ learning rate 𝛼(𝑠)
update rule transition update DP full backup experience simple backup
𝑉𝑘+1 𝑠′ iter state space
testing phase value function 𝑉 𝜋 action selection
𝜋(𝑠) = arg max𝑎
∑𝑠
𝑅(𝑠, 𝑎) + 𝑉 (𝑠)
𝑠′ experience DP expectation over transition distribution
Q-Learning
Model-free
Q function state-action value function
𝑄 : (𝑠, )→ R
infinite horizon Q function
TD(0) Q function sampling action selection transition model
Hyper Parameters
• 𝛾 discount factor
• 𝛼 learning rate
Initialization
• baseline (arbitrarily or trivial) 𝑄
• e.g. 𝑄(𝑠, 𝑎) = 0,∀𝑠 ∈ 𝑆, ∀𝑎 ∈ 𝐴
function choose_action()if exploration
random actionelse
base on current Qend
end
1.7. Reinforcement Learning 69

Notes, Release
for each episodes <- starting state
while (s' != goal state)a <- choose_action()perform action a
Q(s, a) <- Q(s, a) + 𝛼(r + 𝛾 max Q(s', a') - Q(s, a))s <- s'
endend
Off-policy Q max operator episode
“while following some exploration policy 𝜋, it aims at estimating the optimal policy 𝜋*“
SARSA
State-Action-Reward-State-Action
Update rule:
𝑄𝑡+1(𝑠𝑡, 𝑎𝑡) = 𝑄𝑡(𝑠𝑡, 𝑎𝑡) + 𝛼(𝑟𝑡 + 𝛾𝑄𝑡(𝑠𝑡+1, 𝑎𝑡+1)−𝑄𝑡(𝑠𝑡, 𝑎𝑡))
On-policy action 𝑎𝑡+1 𝜋(𝑠𝑡+1) Q-learning max operator max operator action Q value
Q SARSA
SARSA non-stationary
Actor-Critic Learning
On-policy policy value function
Actor Policy function
Critic Value function state-value function 𝑉
action selection critic TD-error action
𝛿𝑡 = 𝑟𝑡 + 𝛾𝑉 (𝑠𝑡 + 1)− 𝑉 (𝑠𝑡)
preference of an action 𝑎 in state 𝑠 defined as 𝑝(𝑠, 𝑎), update rule:
𝑝(𝑠𝑡, 𝑎𝑡) < −𝑝(𝑠𝑡, 𝑎𝑡) + 𝛽𝛿𝑡
TD-error / action preference preference update rule actor-critic method policy prior
Monte Carlo Method
unbiased estimate
𝑇𝐷(𝜆) where 𝜆 = 1 Monte Carlo
70 Chapter 1. Algorithm

Notes, Release
Reference
• https://en.wikipedia.org/wiki/Reinforcement_learning
• https://www.quora.com/What-is-the-difference-between-model-based-and-model-free-reinforcement-learning
• https://ocw.mit.edu/courses/aeronautics-and-astronautics/16-410-principles-of-autonomy-and-decision-making-fall-2010/lecture-notes/MIT16_410F10_lec23.pdf
1.7.2 Batch Reinforce Learning
Pure Batch RL
Three phase
1. experience
• purely random action
• agent
• experience set ℱ = (𝑠, 𝑎, 𝑟′, 𝑠′) . . . experience
2. Learning stage
• experience set prior
• experience set optimal policy
3. Application
purely random (uniformed policy) state goal state states
Growing Batch RL
Modern batch RL pure batch pure online
Foundations of Batch RL Algorithms
Q-Learning Q learning system Q Q table discrete state space state space
• exploration overhead
• stochastic approximation
• function approximation
Experience Replay
pure online Q-Learning current optimal action exploration -greedy state Q table greedy greedy policy transitiontuple (𝑠, 𝑎, 𝑟, 𝑠′) update 𝑄′(𝑠, 𝑎) table “local” update
experience replay exploration overhead.
experience replay growing batch problem
experience n experience apply update rule n iter experience back-propagate
1.7. Reinforcement Learning 71

Notes, Release
Stability Issues
Idea of Fitting
Online RL asynchronous updates state state
Q table discrete case update state-action pair
Idea of Fitting function approximation
𝑓 ′(𝑠, 𝑎) = 𝑓(𝑠, 𝑎) + 𝛼(𝑟 + max𝑎′∈𝐴
𝑓(𝑎′, 𝑠′)− 𝑓(𝑠, 𝑎))
= 𝑓(𝑠, 𝑎) + 𝛼(𝑞𝑠,𝑎 − 𝑓(𝑠, 𝑎))
update structuree.g reward ...etc
Fitting update rule
Stable Function Approximation in Dynamic Programming
function approximator TD methods K-nearest-nieghbor, linear interpolation(?), local weight averaging approxima-tion
Algo:
1. a set of 𝑠 ∈ 𝑆 (state space) set 𝐴. 𝑠 distribution sampling state space sampling supports.
2. Initial guess value function 𝑉0
3. 𝑀𝐴 learning algorithm training set 𝐴 𝑓(𝐴) training set labels
𝑀𝐴(𝑓(𝐴), 𝐴)→ 𝑓
𝑀𝐴 label training data function approximator (e.g. a neural nets) 𝑓
4. iteration
𝑉 0
𝑉 1 ←𝑀𝐴(𝑉 0, 𝐴0)
𝐴1 ← 𝑇𝐴(𝑉 1)
(sampling)
𝑉 2 ←𝑀𝐴(𝑉 1, 𝐴1)
. . .
Replace Inefficient Stochastic Approximation
fitting model-free-sample-based
Ormoneit (2002) random sampling supports 𝑓 sampled transition + kernel-based approximator 𝑓
transition samples (a set of state-action pair) (given current state) transition value e.g. transition value averaging (orkernel-based averaging)
Ormoneit averaging transition model this implies from random sampling to the true distribution.
72 Chapter 1. Algorithm

Notes, Release
Batch RL Algorithms
Ormoneit kernel-based framework
kernel-based approximate dynamic programming (KADP)
• experience replay
• fitting
• kernel-based self-approximation (sample-based)
Kernel-Based Approximate Dynamic Programming
Bellman equation function
𝑉 = 𝐻𝑉
𝑉 = 𝑉
𝐻 DP-operator
Iteration process, where 𝑉 0 is the initial guess:
𝑉 𝑖+1 = 𝑉 𝑖
where = 𝐻𝑚𝑎𝑥𝑎𝑑𝑝
∴ 𝑉 𝑖+1 = 𝐻𝑚𝑎𝑥𝑎𝑑𝑝𝑉
𝑖
with a given exp set
𝐹 = (𝑠𝑡, 𝑎𝑡, 𝑟𝑡+1, 𝑠𝑡+1)|𝑡 = 1 . . . 𝑝
𝑎𝑑𝑝𝑉
𝑖
𝑎𝑑𝑝𝑉
𝑖 =∑
(𝑠,𝑎,𝑟,𝑠′)∈𝐹𝑎
𝑘(𝑠, 𝜎)(𝑟 + 𝛾𝑉 𝑖(𝑠′)
)=⇒ 𝑖+1
𝑎 (𝜎) =∑
(𝑠,𝑎,𝑟,𝑠′)∈𝐹𝑎
𝑘(𝑠, 𝜎)(𝑟 + 𝛾max
𝑎′∈𝐴𝑖(𝑠′, 𝑎′)
)𝐹𝑎 given 𝑎 set 𝑖+1
𝑎 given 𝑎
Bellman equation max operator
𝑉 𝑖+1(𝑠) = 𝐻𝑚𝑎𝑥𝑖+1𝑎 (𝑠)
= max𝑎∈𝐴
𝑖+1𝑎 (𝑠)
policy argmax
𝜋(𝑠) = arg max𝑎∈𝐴
𝑉 𝑖+1(𝑠)
policy update rule
𝜋𝑖+1(𝜎) = arg max𝑎∈𝐴
𝑉 𝑖+1(𝜎)
= arg max𝑎∈𝐴
∑(𝑠,𝑎,𝑟,𝑠′)∈𝐹𝑎
𝑘(𝑠, 𝜎)(𝑟 + 𝛾max
𝑎′∈𝐴𝑖(𝑠′, 𝑎′)
)Constrain from kernel: ∑
𝐹𝑎
𝑘(𝑠, 𝜎) = 1, ∀𝜎 ∈ 𝑆
1.7. Reinforcement Learning 73

Notes, Release
Kernel-Based Reinforcement Learning
• Ormoneit (2002)
continuous state-space TD parametric function approximator (e.g neural nets, linear regression) Bellman equationinitialization value bias reinforcement learning algorithm e.g bias regression problem
Bias-variance tradeoff
• bias: underfitting
• variance: overfitting
• discounted-cost problem
• average-cost problemOrmoneit & Glynn (2002)
Kernel-based averaging (inspired by idea of local averaging).
MDP setting
• discrete time steps 𝑡 = 1, 2, . . . 𝑇
74 Chapter 1. Algorithm

CHAPTER 2
Database
2.1 Cloudant
CouchDB is the database for hackers. The philosophy of design is totally different from Mongo.
CouchDB let application built/stored inside database (via design document). And hackers can make a customizedquery server to create magical data service!
2.1.1 REST API
The REST api is stateless. Thus, there is no cursor.
/_all_docs
sorted key list
GET
params:
• startkey
• endkey
• include_doc=(true|false) false
• descending=(true|false) false
• limit=N
• skip=N
75

Notes, Release
2.1.2 Replication
CouchDB developes a well-defined replication protocol.
• Only sync on differ, including change history, deleted docs.
• compression through transfer
Master To Master
CouchDB can just setup replicator on both end to achieve this.
Single Replication
For the snapshot of database
_local doc
The doc recorded in _local won’t be sent through replication.
API
METHOD /database/_local/id
Alternative
If we want to use including method, we can use docs_id in replication doc:
doc_ids (optional) Array of document IDs to be synchronized
Replicator Database
The field _replication_state always is triggered, if this replication is set to continue.
Idea
We can build a application understanding this protocol to
1. make a backup service
2.1.3 Revision
limits
CouchDB can track document’s revsion up to 1000 (default limit, configurable)
$ curl "http://server/db/_revs_limit"1000
76 Chapter 2. Database

Notes, Release
Get revisions list
$ curl "http://server/db/doc?revs=true"
$ curl "http://server/db/doc?revs_info=true"
2.1.4 Secondary index
MapReduce
• Unable to join between documents
Map Function
map() -> (key, val)
• build-in MapReduce fnuctions was written in Erlang -> faster
reduce function can be group by key
• pi?group=true
• api?group_level=N
multiple emit
function(doc)
emit(doc.id, 1);emit(doc.other, 2);
GET
reduce true|false
group true|false
stale ok -> optional skip index building
group_level key in [k1, k2, k3]
group_level=1 -> group by [k1]
group_level=2 -> group by [k1, k2]
Reduce Function
if rereduce is False:
reduce([
[key1, id1],[key2, id2],[key3, id3]
],[ value1, value2, value3 ],
2.1. Cloudant 77

Notes, Release
false,)
e.g:
reduce([
[[
id,val,
],id1],
[[
id,val,
], id2],
[[
id,val,
], id3]
],[ value1, value2, value3 ],false,
)
View Group
One design doc can contain multiple view. Thus, there is a view group.
Each view group consume one Query Server(one process),
Chainable MapReduce
Add dbcopy field in design document
• cloudant only feature
TOOD ref
2.1.5 CouchApp
This is the killer feature of CouchDB.
Application can live in CouchDB.
The function defined in design documents will be run with Query Server. CouchDB self-shipped a js engine, Spider-Monkey, as default Query Server. We can customized our Query Server, also.
• It contains server-side js engine, earlier than nodejs.
• Couch Desktop
78 Chapter 2. Database

Notes, Release
• CouchApp can be distributed via Replication .
Query Server
Protocol
CouchDB communicate with it via stdio.
Time out
config
# to show$ curl -X GET deb/_config/couchdb
"uuid": "47a043497fb27ffd481a25671220b2c5","max_document_size": "67108864","database_dir": "/srv/cloudant/db","file_compression": "snappy","geo_index_dir": "/srv/cloudant/geo_index","attachment_stream_buffer_size": "4096","max_dbs_open": "500","delayed_commits": "false","view_index_dir": "/srv/cloudant/view_index","os_process_timeout": "5000"
# change config$ curl -X PUT deb/_config/couchdb/os_process_timeout -d '10000'
Show Function
List Function
Update Function
updatefuc(doc, req)
2.1.6 Cloudant Search
• build on Apache Lucene
• text searching
• text analyzer
• ad-hoc query
– primary index
– secondary index
• can create index on inside text
2.1. Cloudant 79

Notes, Release
Query Syntax
Lucene query syntax ref
Index Function
index('field', doc.field, options: val)
2.1.7 Cloudant Query
• JSON query syntax
• store in design doc
– primary index (out-of-box)
– type json: store json index in view.map
– search index -> type text
– lang (query server) query
2.1.8 Security
Auth
local.ini
Assume we have the following admin section with unencrypted password.
[admin]
admin = passwordfoo = bar...
And restart the cloudant/couchdb, it will auto generate encrypted password for you.
Couchdb:
$ sudo service couchdb restart
Cloudant on debian:
$ sudo sv restart /etc/service/cloudant
2.1.9 Comparison
The following table compare some method in design document.
80 Chapter 2. Database

Notes, Release
item Secondary Index Cloudant Search Cloudant QueryRequire to build index V V XSenario
• Map– doc filter-
ing– doc
reshaping– multipleemit()
• Reduce– sum– stat– count– grouping– complex
key– for
reporting• Query Server
– embededAP
– specialprotocol
– highlycus-tomized
• Search engine– keyword
search–
tokenlizer– fuzzy
search– regex– numeric value
*rangebase
• Ad-hoc query• module mango
– providemongo-likequerysyntax
• SQL-like– need to
defineschemafirst
2.1.10 Attachment
All data (whatever readable or unreadable) store in the database B-tree.
An attachment should be store under a document.
API
e.g.: We have a doc user
$ curl -X GET http://server/db/user
"id": "user",..."_attachments":
"filename": "content_type": "...",... // meta datas
2.1. Cloudant 81

Notes, Release
Create
Via PUT to
http://server/db/user/filename
2.1.11 Cluster
API
GET /_up
GET /_haproxy
GET /_haproxy_health_check
2.1.12 Idea
Create ecosystem
1. CouchApp + http://codepen.io clone app from codepen!
2. CouchApp + deck.js
Visual tool for schema discover
2.1.13 Survey
Mongo cluster
2.2 MongoDB
2.2.1 Overview
MongoDB require driver to communicate with server and transfer bson.
BSON document
Additional type info
Database
Same as database in RDBMS
Collection
It’s analogous to table. All the docs in a collection should share similar schema.
82 Chapter 2. Database

Notes, Release
2.2.2 CRUD
Query
MongoDB is quite suitable for making ad-hoc/dynamic query.
We provide large amount of (SQL-like) selectors.
Syntax
• Collection
• Query Criteria
• Modifier, e.g.: sort, limit
• Projection: The fields will be returned
e.g.:
db.users.find( // criteria'age':
'$gt': 18,
, // projection'name': true,'age': true,
)
"_id" : ObjectId("55addab1166d94c5f8952452"), "name" : "foo", "age" : 18 "_id" : ObjectId("55addade166d94c5f8952453"), "name" : "bar", "age" : 20
Selector
• Comparison: $eq, $gt, ... etc.
• Logical: $or, $and, ... etc.
• Element: $exists, $type
• Evaluation: $regex, $text, $where, ... etc.
• Geospatial: $near, ... etc.
• Array: $all, $size, ... etc.
• Comment: $comment.
• Projection: $, $slice.
Projection
• Inclusion Model:
db.users.find( // criteria'age':
'$gt': 18,
2.2. MongoDB 83

Notes, Release
, // include projection'name': true,'age': true,
)
"_id" : ObjectId("55addab1166d94c5f8952452"), "name" : "foo", "age" : 18 "_id" : ObjectId("55addade166d94c5f8952453"), "name" : "bar", "age" : 20
• Exclusion Model:
db.users.find( // criteria'age':
'$gt': 18,
, // exclude projection'age': false,
)
"_id" : ObjectId("55addab1166d94c5f8952452"), "name" : "foo", "status" : "A" "_id" : ObjectId("55addade166d94c5f8952453"), "name" : "bar", "status" : "B"
Modifier
• limits
• skips
• sort, this require all doc loaded in mem
Text Search
Currently supported langs
Behavior
• Each query run in single collection
• Without sort, the order returned is undefined
Cursor
The find() will return a cursor.
Iteration
1. Using cursor.next()
2. cursor.toArray()
3. cursor.forEach(callback_function)
Isolation problem Same document maybe return more than on time. We using snapshot mode to handle it.
84 Chapter 2. Database

Notes, Release
Max Doc Size
16 MB
16+ MB -> GridFS, required driver
Update
• MongoDB natively support in-place update. Change the fields we want.
•
2.2. MongoDB 85

Notes, Release
86 Chapter 2. Database

CHAPTER 3
FreeBSD
3.1 bsd-cloudinit
3.1.1 Auto Build
Working Flow
Create a raw image file
• 1.1GB is the min requirement
$ truncate -s 1124M bsdcloudinit.raw
Link it with mdconfig(8)
$ sudo mdconfig -a -f bsdcloudinit.rawmd0
Install OS via bsdinstall
bsdinstall provide scripting to automate the whole procedure.
1. Prepare environment variables
(a) We only want kernel and base:
$ export DISTRIBUTIONS='kernel.txz base.txz'
(b) Where bsdinstall can fetch distribution files:
87
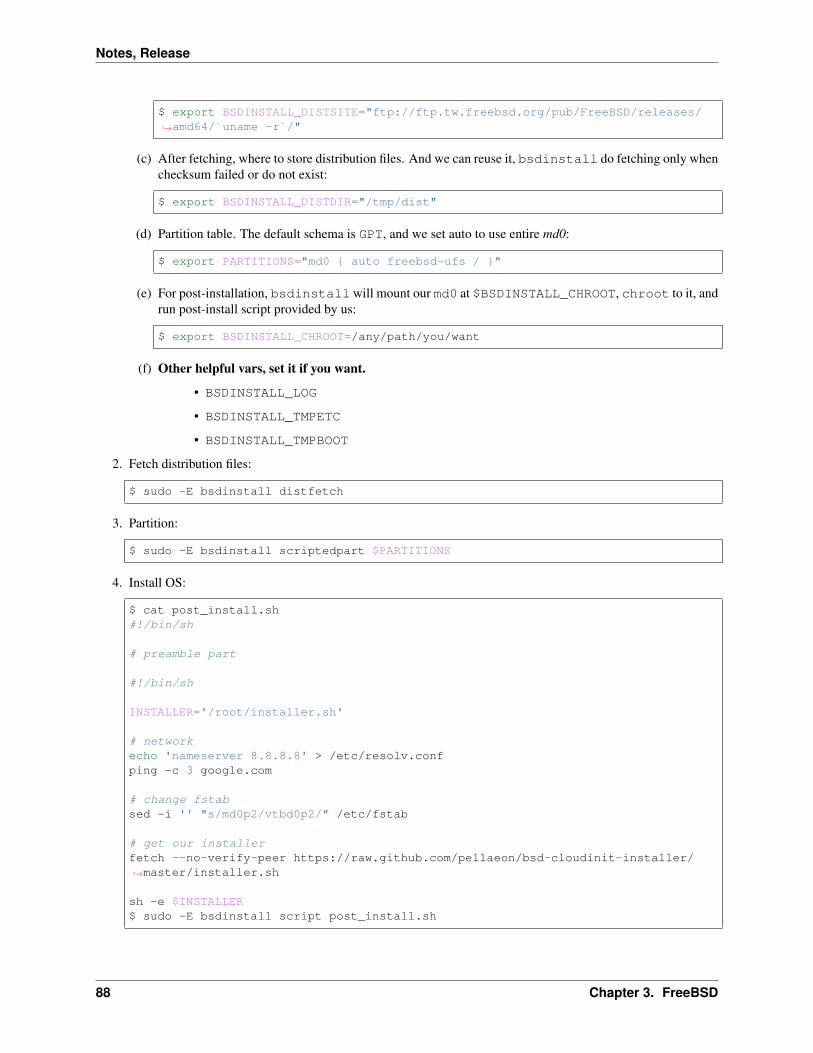
Notes, Release
$ export BSDINSTALL_DISTSITE="ftp://ftp.tw.freebsd.org/pub/FreeBSD/releases/→˓amd64/`uname -r`/"
(c) After fetching, where to store distribution files. And we can reuse it, bsdinstall do fetching only whenchecksum failed or do not exist:
$ export BSDINSTALL_DISTDIR="/tmp/dist"
(d) Partition table. The default schema is GPT, and we set auto to use entire md0:
$ export PARTITIONS="md0 auto freebsd-ufs / "
(e) For post-installation, bsdinstallwill mount our md0 at $BSDINSTALL_CHROOT, chroot to it, andrun post-install script provided by us:
$ export BSDINSTALL_CHROOT=/any/path/you/want
(f) Other helpful vars, set it if you want.
• BSDINSTALL_LOG
• BSDINSTALL_TMPETC
• BSDINSTALL_TMPBOOT
2. Fetch distribution files:
$ sudo -E bsdinstall distfetch
3. Partition:
$ sudo -E bsdinstall scriptedpart $PARTITIONS
4. Install OS:
$ cat post_install.sh#!/bin/sh
# preamble part
#!/bin/sh
INSTALLER='/root/installer.sh'
# networkecho 'nameserver 8.8.8.8' > /etc/resolv.confping -c 3 google.com
# change fstabsed -i '' "s/md0p2/vtbd0p2/" /etc/fstab
# get our installerfetch --no-verify-peer https://raw.github.com/pellaeon/bsd-cloudinit-installer/→˓master/installer.sh
sh -e $INSTALLER$ sudo -E bsdinstall script post_install.sh
88 Chapter 3. FreeBSD

Notes, Release
Push image to OpenStack
Related Resource
• man pc-sysinstall
3.2 Jails
3.2.1 rc.conf
jail_enable="YES"
# and we will need lots of ip for our jailsipv4_addrs_em0="192.168.0.10-30/24"gateway_enable="YES"
pf_enable="YES"
3.2.2 pf.conf
Configuring NAT for jails:
ex_if='em0'ex_ip='140.113.72.14'
jails_net='192.168.0.0/24'
nat on $ex_if proto tcp, udp, icmp from $jails_net to any -> $ex_ip
pass out all
3.2.3 jail.conf
• All of my jails are under /home/jails and I assume its name will correspond with its dir name. So I configurepath as /home/jails/$name.
• I shared the /usr/ports to all of my jails via nullfs. But note that I mount it as readonly filesystem. If wewant to make the ports system work properly, we will need to change some variable in /path/to/jail/etc/make.conf. I will show this config later.
exec.start = "/bin/sh /etc/rc";exec.start += "/usr/sbin/tzsetup Asia/Taipei";
exec.stop = "/bin/sh /etc/rc.shutdown";
exec.clean;mount.devfs;
path = "/home/jails/$name";
mount = "/usr/ports $path/usr/ports nullfs ro 0 0";
3.2. Jails 89

Notes, Release
mount += "proc /home/jails/$name/proc procfs rw 0 0";
allow.raw_sockets;
myjail host.hostname = "myjail.example.org";ip4.addr = 192.168.0.10;
3.2.4 Install Jail via bsdinstall
cd /home/jail/sudo mkdir -p /home/jail/myjail/usr/portssudo bsdinstall myjail
Please check out this script, also: https://github.com/iblis17/env-config/blob/master/bin/newjails
3.2.5 Post-install
/home/jail/myjail/etc/make.conf
/usr/ports is readonly in the jail.
WRKDIRPREFIX=/tmp/portsDISTDIR=/tmp/ports/distfiles
3.2.6 Start and Attach to the jail
service jail start myjail
jls
jexec myjail tcsh
3.3 Tuning
3.3.1 Tuning Power
Ref: https://wiki.freebsd.org/TuningPowerConsumption
Terms
P-states performance states
T-states throttling
S-states sleeping
G-states global
90 Chapter 3. FreeBSD

Notes, Release
C-states CPU
P-states
Make CPU work in different freq.
Intel EIST (Enhanced Intel SpeedStep Technology)
AMD CnQ (Cool’n’Quiet)
By convention, P0 denote the highest freq, and the second one is P1, and so on.
e.g: we have a CPU which highest freq is 3.0Hz. Now, we make it work in 50% of P-states. The freq of CPU willbecome 1.5Hz.
(the source of image: https://cdn0-techbang.pixcdn.tw/system/images/156313/original/3bd6486853a3f91922ee4dbd8f5e502b.jpg)
T-States
Change the working time.
3.3.2 S-States
S1 power on suspend. CPU is off; the RAM is still on.
S2 CPU is off; the RAM is still on. It has lower power consumption then S1.
S3 suspend to RAM. Most of hardware are off; few power one RAM.
S4 suspend to Disk. Dump memory state to disk and poweroff. The power consumption is same aspoweroff (S5).
S5 poweroff
3.3. Tuning 91

Notes, Release
3.4 Commands
3.4.1 bhyve
Network
Ref: https://www.freebsd.org/doc/handbook/virtualization-host-bhyve.html
# ifconfig tap0 create# sysctl net.link.tap.up_on_open=1net.link.tap.up_on_open: 0 -> 1# ifconfig bridge0 create# ifconfig bridge0 addm re0 addm tap0# ifconfig bridge0 up
# ifconfig re0 alias 192.168.1.1
• configure isc-dhcpd to listenon 192.168.1.0/24`
pf.conf
ex_if='re0'ex_ip='...'
bhyve_net='192.168.1.0/24'nat on $ex_if proto tcp, udp, icmp from $bhyve_net to any -> $ex_ip
NetBSD
• install sysutils/grub2-bhyve
• create disk image:
$ truncate -s 3g netbsd.img
• create installation map file:
$ cat install.map(cd0) ./netbsd.iso(hd1) ./netbsd.img
• setup grub:
$ grub-bhyve -r cd0 -M 1G -m instdev.map netbsd
• under the grub interface:
knetbsd -h -r cd0a (cd0)/netbsdboot
• and boot the installer from ISO:
bhyve -A -H -P -s 0:0,hostbridge -s 1:0,lpc \-s 2:0,virtio-net,tap0 \-s 3:0,virtio-blk,./netbsd.img \
92 Chapter 3. FreeBSD

Notes, Release
-s 4:0,ahci-cd,./netbsd.iso \-l com1,stdio -c 2 -m 1G netbsd
• stop vm:
bhyvectl --destroy --vm=netbsd
• create dev.map:
$ cat dev.map(hd1) netbsd.img
• setup grub:
grub-bhyve -r cd0 -M 1G -m dev.map netbsd
• under grub interface:
knetbsd -h -r ld0a (hd1,msdos1)/netbsdboot
• start bhyve:
bhyve -A -H -P -s 0:0,hostbridge \-s 1:0,lpc \-s 2:0,virtio-net,tap0 \-s 3:0,virtio-blk,./netbsd.img \-l com1,stdio -c 2 -m 1G netbsd
OpenBSD
grub install:
kopenbsd -h com0 (cd0)/5.7/amd64/bsd.rdboot
grub:
kopenbsd -h com0 -r sd0a (hd1,openbsd1)/bsdboot
3.4.2 crontab
Format
# minute hour mday month wday command 2>&1
3.4.3 hastd
man 8 hastd
3.4. Commands 93

Notes, Release
3.4.4 ls
-D
Syntax
ls -l -D format
This will replace date time in ls -l with format.
e.g.:
% ls -lD "$PWD/"total 4-rw-r--r-- 1 iblis iblis 0 /tmp/demo/ README-rw-r--r-- 1 iblis iblis 0 /tmp/demo/ bar-rw-r--r-- 1 iblis iblis 0 /tmp/demo/ foo-rw-r--r-- 1 iblis iblis 91 /tmp/demo/ test2.cpp
Trick
ls -lD $PWD/ | sed -e "s%$PWD/ %$PWD/%g"
3.4.5 sade
Handy partition editor used by bsdinstall
man 8 sade
3.4.6 sh
Vi Mode
$ sh -V
And using ESC to switch into normal mode.
Debugging
$ sh -x script.sh
3.4.7 tput
tput AF 3 && echo 'test'
The attribute (e.g. AF) is documented in terminfo(5)
but on linux is:
94 Chapter 3. FreeBSD

Notes, Release
tput setaf 3 && echo 'test'
3.4.8 uname
Env vars
UNAME_flag
e.g, to override output of -r:
$ UNAME_r='10.1-CUSTOM RELEASE' uname -r
3.5 Project
3.5.1 Diskless Issue
I guess those are related.
• man 8 diskless
• man 8 rbootd
• man 8 bootparamd
3.5. Project 95

Notes, Release
96 Chapter 3. FreeBSD

CHAPTER 4
Linux
4.1 Fuse
4.1.1 stat(2)
st_nlink
Number of hard link
An empty dir is 2:
$ mkdir /tmp/demo$ ll /tmp...drwxr-xr-x 2 iblis iblis 40 Jul 29 10:32 demo/...
The 2 located at column 2 is st_nlink.
• One for the dir itself
• One for linking to .
4.2 X11
4.2.1 Turn off Screen
xset -display :0.0 dpms force off
97

Notes, Release
4.3 Yocto
I got an intel edison board and yocto installed.
Connect to it via serial port:
$ sudo screen /dev/ttyUSB0 115200
4.3.1 Install python35
$ wget <python source>$ tar xzvf <Python.tar.gz>$ cd <Python source dir>
$ ./configure --prefix=/usr/local$ make -j 2 # There are two cpus on this SoC$ make test # optional$ make install
Check your pip installed:
$ pip3 -Vpip 7.1.2 from /usr/local/lib/python3.5/site-packages (python 3.5)
4.3.2 Install GNU Screen
$ ./autogen.sh$ ./configure --prefix=/usr/local$ make -j 2$ make install
4.3.3 Run EC
$ cd /path/to/ec$ cd setup
Patch the startup.sh
1 --- startup.sh.orig2 +++ startup.sh3 @@ -1,9 +1,12 @@4 #!/bin/sh5
6 -LOG=~/easyconnect/ec/log/startup.log7 +EC_HOME=~/easyconnect8 +PYTHON=$EC_HOME/.venv/bin/python9 +LOG=$EC_HOME/ec/log/startup.log
10
11 -cd ~/easyconnect12 +cd $EC_HOME
98 Chapter 4. Linux

Notes, Release
13 screen -dmS easyconnect > $LOG 2>&114 +15 add_to_screen() 16 TITLE=$117 DIR=$218 @@ -17,23 +20,14 @@19
20 # wait for screen.21 while [ 1 ]; do22 - ps aux | grep -v grep | grep SCREEN | grep easyconnect > /dev/null 2>&123 + ps | grep -v grep | grep SCREEN | grep easyconnect > /dev/null 2>&124 if [ $? -eq 0 ]; then25 break26 fi27 sleep 128 done29
30 -add_to_screen Comm. ec/ './server.py >> log/server.log 2>&1' >> $LOG 2>&131 -add_to_screen Exec. ec/ './main_na.py' >> $LOG 2>&132 -add_to_screen sim ec/ './simulator.py' >> $LOG 2>&133 -add_to_screen CCM ccm/ 'python3 main.py' >> $LOG 2>&134 -35 -sleep 536 -#firefox http://localhost:7788/connection > /dev/null 2> /dev/null &37 -/opt/google/chrome/google-chrome --app=http://localhost:7788/connection \38 - > /dev/null 2>&1 &39 -40 -sleep 241 -add_to_screen arrange ccm/arrangement/ './arrange_window.sh' >> $LOG 2>&142 -43 +add_to_screen Comm. ec/ "$PYTHON ./server.py >> log/server.log 2>&1" >> $LOG 2>&144 +add_to_screen Exec. ec/ "$PYTHON ./main_na.py" >> $LOG 2>&145 +add_to_screen sim ec/ "$PYTHON ./simulator.py" >> $LOG 2>&146 +add_to_screen CCM ccm/ "$PYTHON ./main.py" >> $LOG 2>&1
Patch the ec/main_na.py
When the edison in host ap mode, the default gateway gone. The orignial code bind socket to all interface, thus causeudp broadcasting failed.
1 --- main_na.py.orig2 +++ main_na.py3 @@ -5,6 +5,8 @@4 import time5 import os6 import socket7 +import fcntl8 +import struct9 from urllib.error import HTTPError, URLError
10 import logging11 from logging.handlers import TimedRotatingFileHandler12 @@ -30,6 +32,7 @@13 SHELL_PORT_FILE = 'run/main.port'14 SHELL_HOST = '127.0.0.1'15
16 +INTERFACE = 'wlan0'
4.3. Yocto 99

Notes, Release
17 BROADCAST_PORT = 1700018
19
20 @@ -228,6 +231,18 @@21 session.close()22
23
24 +def get_ip_address(s, interface):25 + '''26 + :param s: the socket instance27 + :param interface: e.g. eth0, wlan0.28 + '''29 + return socket.inet_ntoa(fcntl.ioctl(30 + s.fileno(),31 + 0x8915, # SIOCGIFADDR32 + struct.pack(b'256s', interface[:15].encode())33 + )[20:24])34 +35 +36 def main():37 log = logging.getLogger(__name__)38
39 @@ -240,7 +255,10 @@40 skt = socket.socket(socket.AF_INET, socket.SOCK_DGRAM)41 skt.setsockopt(socket.SOL_SOCKET, socket.SO_REUSEADDR, 1)42 skt.setsockopt(socket.SOL_SOCKET, socket.SO_BROADCAST, 1)43 - skt.bind(('', 0))44 +45 + bind_ip = get_ip_address(skt, INTERFACE)46 + skt.bind((bind_ip, 0))47 + log.info('Bind socket on '.format(INTERFACE, bind_ip))48
49 log.info('started')50
Prepare virtualenv
$ cd /path/to/ec$ pyvenv-3.5 .venv$ source .venv/bin/activate
Patch the ec/requirements.txt
1 --- requirements.txt.orig2 +++ requirements.txt3 @@ -1,5 +1,3 @@4 flask5 sqlalchemy6 ---allow-external mysql-connector-python7 -mysql-connector-python8 sphinx
100 Chapter 4. Linux

Notes, Release
$ pip install -r ec/requirements.txt
Run it!
$ /path/to/ec/startup.sh
4.3.4 Make EC Run at System Started
$ vi /etc/rc.local$ cat /etc/rc.local#!/bin/sh
echo 'Boostrap EC'/home/root/easyconnect/setup/startup.sh$ chomd +x /etc/rc.local
Then reboot for checking.
4.3.5 Make Yocto in AP Mode
$ /usr/bin/configure_edison --enableOneTimeSetup --persist
4.3.6 Relax
Enjoy!
4.3. Yocto 101

Notes, Release
102 Chapter 4. Linux

CHAPTER 5
Language
5.1 C
5.1.1 Macro
ref: http://clang.llvm.org/docs/LanguageExtensions.html#builtin-macros
__COUNTER__
Useful for createing Static Assertion in C.
#include <stdio.h>
int main(int argc, char *argv[])
printf("%d\n", __COUNTER__);printf("%d\n", __COUNTER__);printf("%d\n", __COUNTER__);return 0;
5.1.2 Static Assertion
• compile time evaluated assertion
• compile time assertion will be removed via preproccessor
In C11 standard, use keyword _Static_assert.
In assert.h:
#define static_assert _Static_assert
103

Notes, Release
Sample:
#include <assert.h>int main()
static_assert(42, "magic");static_assert(0, "some error");return 0;
5.1.3 Static Function
• scope limited to current source file
If the function or variable is visible outside of the current source file, it is said to have global, or externalscope.
If the function or variable is not visible outside of the current source file, it is said to have local, or staticscope.
Sample
https://github.com/iblis17/notes/tree/master/lang/c/static-func
$ makecc -O2 -pipe -Wall -c foo.ccc -O2 -pipe -Wall main.c foo.o -o main$ ./mainfunc f
Break It Down
$ make break
5.2 Erlang
5.2.1 Erlang Basic
Shell
Quit ^G then q
History
h() list history
v(N) show the value of history n
Show variable bindings b()
Clean variable binding(s)
f(Var) Set the Var to unbound
104 Chapter 5. Language

Notes, Release
f() Clean all variables
Compile Module c(module_name)
Variable
• Capitalize
> One = 1.1
Anonymou var _
Pattern matching =
Atom
No matter how long, cost 4 bytes in 32 bits system, 8 in 64 bits.
No overhead in copy, so it’s good for message passing.
> red.red
> red = 'red'.red
> red == 'red'.true
Bool
• and
• or
• xor
• andalso: short-circuit operator
• orelse: short-circuit operator
• not
• =:=
• =/=
• ==
• /=
• >
• <
• >=
• =< Note this
5.2. Erlang 105

Notes, Release
Order
number < atom < reference < fun < port < pid < tuple < list < bit string
Tuples
> Point = 3, 4.3,4
> X, Y = Point.3,4
> X, _ = Point.
tagged tuple km, 100
Builtins
element:
> element(2, Point).3
setelement:
> setelement(2, Point, 100).3, 100
tuple_size:
> tuple_size(Point).2
List
Syntax [e1, e2 ...]
String is a list (no built-in string type):
> [97, 98, 99]."abc"
> [97, 98, 99, 4, 5, 6].[97,98,99,4,5,6]
>[233]."é"
Note Erlang is lack of string manipulations functions.
++ right-associative, eval from right to left.
This operator (or append function) will build a NEW copy of list, it will cost more and more memory inrecursive function.
106 Chapter 5. Language

Notes, Release
ref: http://erlang.org/doc/efficiency_guide/listHandling.html
-- right-associative.
They are right-associative.
9> [1,2,3] -- [1,2] -- [3].[3]10> [1,2,3] -- [1,2] -- [2].[2,3]
Functions
hd (head) pick up the first element:
> hd([1, 2, 3]).
1
tl (tail) pick up [1:]:
> tl([1, 2, 3]).
[2, 3].
> tl([1, 97, 98]). “ab”
length length(List)
Cons operator
• Constructor operator
Syntax [Term1 | [Term2 | [TermN]]]...
e.g. [Head | Tail]:
> Ls = [1, 2, 3, 4].[1,2,3,4]
> [0|Ls].[0,1,2,3,4]
> [Head | Tail] = [1, 2, 3].[1,2,3]
> Head.1
> Tail.[2,3]
Note Do not use [1 | 2]. This only work in pattern matching, but break all other functions like length.
5.2. Erlang 107

Notes, Release
List Comprehension
Syntax NewList = [Expression || Pattern <- List, Condition1, Condition2, ...ConditionN].
e.g.:
> [X * X || X <- [1, 2, 3, 4]].[1,4,9,16]
> [X * X || X <- [1, 2, 3, 4], X rem 2 =:= 0].[4,16]
Generator expression Pattern <- List.
This could be more than one in list comprehension:
> [X + Y || X <- [1, 2], Y <- [10, 20]].[11,21,12,22]
Bit Syntax
Erlang provide powerful bit manipulations.
Syntax
quote in <<...>>:
ValueValue:SizeValue/TypeSpecifierListValue:Size/TypeSpecifierList
Size
bits or bytes, depends on Type or Unit.
TypeSpecifierList
Type integer | float | binary | bytes | bitstring | bits | utf8| utf16 | utf32.
Note
• bits =:= bitstring
• bytes =:= binary
Sign signed | unsigned
Endian big | little | native
Unit unit:Integer
e.g.: unit:8
108 Chapter 5. Language
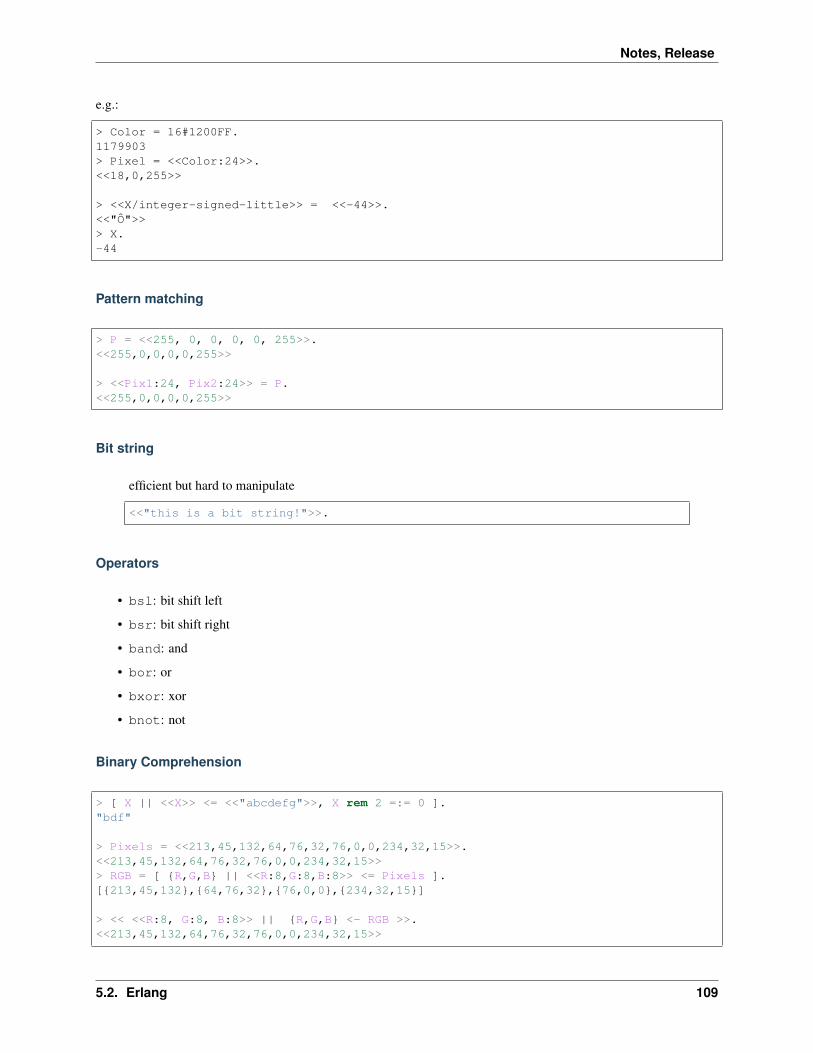
Notes, Release
e.g.:
> Color = 16#1200FF.1179903> Pixel = <<Color:24>>.<<18,0,255>>
> <<X/integer-signed-little>> = <<-44>>.<<"Ô">>> X.-44
Pattern matching
> P = <<255, 0, 0, 0, 0, 255>>.<<255,0,0,0,0,255>>
> <<Pix1:24, Pix2:24>> = P.<<255,0,0,0,0,255>>
Bit string
efficient but hard to manipulate
<<"this is a bit string!">>.
Operators
• bsl: bit shift left
• bsr: bit shift right
• band: and
• bor: or
• bxor: xor
• bnot: not
Binary Comprehension
> [ X || <<X>> <= <<"abcdefg">>, X rem 2 =:= 0 ]."bdf"
> Pixels = <<213,45,132,64,76,32,76,0,0,234,32,15>>.<<213,45,132,64,76,32,76,0,0,234,32,15>>> RGB = [ R,G,B || <<R:8,G:8,B:8>> <= Pixels ].[213,45,132,64,76,32,76,0,0,234,32,15]
> << <<R:8, G:8, B:8>> || R,G,B <- RGB >>.<<213,45,132,64,76,32,76,0,0,234,32,15>>
5.2. Erlang 109

Notes, Release
5.2.2 Erlang Module
call a function from module Module:Function(Args).
> lists:seq(1, 10).[1,2,3,4,5,6,7,8,9,10]
Declaration
Attribute
Sytax
-Name(Attribute).
Required attribute
-module(Name).
Name is an atom
Export functions
-export([Function1/Arity, Function2/Arity, ..., FunctionN/Arity]).
Arity How many arg can be passed to the function.
Different function can share same name: add(X, Y) and add(X, Y, Z). They will carrydiffrent arity: add/2 and add/3.
Import functions
Invoking an external function do not require imported, just do this like we do in the shell:
-module(name)...g -> 10 * other_module:some_f(100).
But this maybe get too verbose when we using lots of external functions.
So we have -import directive for removing the module prefix during invoking.
-import(Module, [Function/Arity, ...]).
-import(io, [format/1])....g - > format(...). % not io:format
110 Chapter 5. Language

Notes, Release
Macro
similar to C’s Macro. They will be replace before compiling.
-define(MACRO, value).
Use as ?MACRO inside code.
e.g.:
-define(sub(X, Y), X - Y).
Function
Sytax
Name(Args) -> Body.
Name an atom
Body one or more erlang expressions
Return The value of last expression
e.g:
add(X, Y) ->X + Y.
hello() ->io:format("Hello World!~n").
Compile the code
• $ erlc file.erl
• In shell, c(module)
• In shell or module, compile:file(FileName)
Define compiling flags in module
e.g.: -compile([debug_info, export_all, ...]).
Note: export_all make native compiler conservative. But using export_all with normal BEAM vm is almostnot affected.
Ref: https://stackoverflow.com/questions/6964392/speed-comparison-with-project-euler-c-vs-python-vs-erlang-vs-haskell#answer-6967420
5.2. Erlang 111

Notes, Release
Compile into native code
There is two way to deal with it.
• hipe:c(Module, OptionList).
• c(Module, native).
More about module
module_info/0
> test:module_info().[module,test,exports,[add,2,module_info,0,module_info,1],attributes,[vsn,[146299772997766369192496377694713339991]],compile,[options,[native],
version,"6.0",time,2015,7,12,15,5,54,source,"/tmp/test.erl"],
native,true,md5,<<179,5,110,53,195,122,250,63,30,245,110,140,79,
121,143,254>>]
module_info/1
> test:module_info(exports).[add,2,module_info,0,module_info,1]
vns
This is an auto generated version for your code. It’s used for hot-loading.
> hd(test:module_info(attributes)).vsn,[146299772997766369192496377694713339991]
It can be set manually.
-vsn(VersionNumber).
Other directives
• -author(Name)
• -date(Date)
• -behavior(Behavior)
• -record(Name, Field)
112 Chapter 5. Language

Notes, Release
Documenting Modules
Erlang includes doc system called EDoc.
Sample module called hello.erl:
%% @author Iblis Lin <[email protected]> [https://github.com/iblis17]%% @doc The features of this module.%% @version
- module(name)....
Then we can build it via shell:
1> edoc:files(["hello.erl"], [dir, "docs"]).ok
Now we will get some html files in docs folder.
5.2.3 Erlang Function
Basic
1> F = fun(X) ->math:sqrt(X) * 10
end.
2> G = fun(X) ->Y = math:sqrt(X),10 * Y
end.
Bind function from module
Assume we have a function f/1 in the module hello. If we want to bind hello:f to variable:
1> F = fun hello:f/1.2> F(...).
Pattern Matching
Function Clause
Sample: replace if
def g(gender, name):if gender == 'male':
print('Hello, Mr. '.format(name))elif:
print('Hello, Mrs. '.format(name))else:
print('Hello, '.format(name))
5.2. Erlang 113

Notes, Release
In Erlang:
g(male, Name) ->io:format("Hello, Mr. ~s", [Name]);
g(female, Name) ->io:format("Hello, Mrs. ~s", [Name]);
g(_, Name) ->io.format("Hello, ~s", [Name]).
Guards
Addictional clause to check vars. Let us check the content of argument, not only shape/position.
It’s indicated by when.
It can use only a small set of builtin functions to guarantee there is’nt no side effect.
Multiple conditions:
• , (commas): like and, e.g.: when X >= 60, X =< 100 -> ...
• ; (semicolons): like or
is_pass(X)when X >= 60, X =< 100 ->
true.is_pass(_) ->
false.
> module:is_pass(80).true
> module:is_pass(a).true%% what happend ?!
case expression
It let you move pattern matching inside function.
It’s similar to case but without pattern matching.
5.2.4 Data Structures
Record
• Just like namedtuple in Python.
• In erlang shell, rr(module) to load _records_.
• It’s an syntax sugar for compiler
114 Chapter 5. Language

Notes, Release
5.2.5 Concurrent
receive
receivePattern1 -> value;Pattern2 -> value
after Time ->value
end.
Note: Time is in millionseconds, but can be atom infinity.
Link
> “I am going to die if my partner dies.”
Here is a race condiction:
link(spawn(...)).
It’s possible that the process crash before the link established. So, please use:
spawn_link(...).
Trap
Turn a process into system process:
process_flag(trap_exit, true).
And get exception via receive expression, e.g.:
spawn_link(fun() -> timer:sleep(1000), exit(magic) end), receive X -> X end.
%% will get 'EXIT',<0.134.0>,magic.
The kill signal cannot be trapped:
> process_flag(trap_exit, true).false> exit(self(), kill).
** exception exit: killed
Note: Because the kill signal cannot be trapped, so the it will be changed to killed when other process receivethe message.
Monitor
It’s special type of link with
5.2. Erlang 115

Notes, Release
• unidirection
• can be stacked
erlang:monitor(process, Pid).
Note the potential race condiction in following code:
erlang:monitor(process, spawn(fun() -> ok end)).
So here is an atomic function:
spawn_monitor(fun() -> ok end).
Demonitor:
erlang:demonitor(Ref).erlang:demonitor(Ref, [flush, info]).
Naming Porcess
• register(atom, Pid)
And just send via atom:
> atom ! self(), hello<pid>, hello
5.2.6 Designing a Concurrent Application
Origin: http://learnyousomeerlang.com/designing-a-concurrent-application
• “A reminder app”
Requirement
Task:
name deadline
Operation:
• Cancel event by name.
• Task deadline alert.
Component
• Task Server
• Client
• Task process
116 Chapter 5. Language

Notes, Release
Protocol
• client monitor server
• server monitor client, also
> client can live without server, and vice versa.
5.2.7 Finite State Machine
• elements: (State), Event, and Data ()
Event State A Event foo (with Data X) State B
Simple cat FSM:
1 -module(cat_fsm).2
3 -compile(export_all).4
5 -behaviour(gen_fsm).6
7
8 %%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%9 %%% public api
10 %%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%11
12 start() ->13 ok, Pid = gen_fsm:start(?MODULE, [], []),14 Pid.15
16
17 stop(Pid) ->18 gen_fsm:stop(Pid).19
20
21 poke(Pid) ->22 gen_fsm:sync_send_event(Pid, poke, 5000).23
24
25 %%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%26 %%% export for generic fsm framework27 %%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%28
29 init(_) ->30 ok, meow, data, 5000.31
32
33 terminate(_, _, _) ->34 ok.35
36
37 meow(timeout, _Data) ->38 io:format("meow~n"),39 next_state, meow, [], 5000;40
41 meow(Unknown, _Data) ->42 io:format("meow ~p~n", [Unknown]),43 next_state, meow, [], 5000.
5.2. Erlang 117

Notes, Release
44
45
46 meow(poke, _From, _Data) ->47 reply, jump, meow, [], 5000.48
49
50 code_change(_OldVer, _State, _Data, _Extra) ->51 %% do nothing52 ok, meow, [].
5.2.8 stdlib
Eunit
• put testing code in test dir.
• include the eunit header file.
• naming:
– ... _test(): single test case
– ... _test_(): test cases generator, return a list of testing cases function.
5.3 Python
5.3.1 Basic
Builtin Functions
>>> print('\v'.join(map(str,range(10))))0123456789
>>> print('\v'.join(map(str, range(10, 20))))10
1112
131415
1617
118 Chapter 5. Language

Notes, Release
1819
Exception
Handy args
>>> e = Exception('reason', 'detail')>>> e.args('reason', 'detail')
property decorator
How dose it work? It return a Descriptor Object.
Data Descriptor An object defines both __get__() and __set__()
Non-data Descriptor An object only defines __get__()
Make read-only data descriptor: make __set__ raise AttributeError.
Attribute Lookup
a.x
Order:
1. Data descriptor
2. a.__dict__['x']
3. type(a).__dict__['x']
4. Non-data descriptor
Ref:
• http://stackoverflow.com/questions/17330160/how-does-the-property-decorator-work
• https://docs.python.org/3.6/howto/descriptor.html
Standard Library
multiproccessing.pool
map, imap variants map chunck_size iterable iterable early evaluated lazy
stdlib (3.6) producer & consumer
Ref: https://stackoverflow.com/questions/5318936/python-multiprocessing-pool-lazy-iteration
5.3. Python 119

Notes, Release
5.3.2 Web
Django
Deployment
• heroku
• pythonanywhere
5.3.3 Project
5.4 R Language
• Intro
5.5 Lua
5.5.1 Lua basic
Terms
Chunk a sequence of statements
Quote
> 'hello' == "hello" -- true
Function
function t(args)...
end
Assignment
-- ugly, but valid> a = 1 b = a * 2
Commend Line
-l <chunk>
Execute chunk
120 Chapter 5. Language

Notes, Release
$ cat c1.luaa = 100
$ cat c2.luab = 3
$ cat c3.luaprint(a * 3)
$ lua -l c1 -l c2 c3300
This will execute c1 and c2 first.
5.6 JavaScript
5.6.1 ECMAScript 6
Destructuring
Looks like var unpacking in python, but more powerful. It can handle object.
Ref
• https://github.com/lukehoban/es6features#destructuring
Fetch API
fetch('https://path/toapi/url').then(function(res)console.log('aaaaa'); return res).then(function(res)console.log(res))
Ref
• https://developer.mozilla.org/en-US/docs/Web/API/Fetch_API
• https://developer.mozilla.org/en-US/docs/Web/API/GlobalFetch/fetch
5.6.2 Airbnb JS Coding Style Guide
let
If we cannot use const, use let instead of var. let is block-scope.
Ref: https://github.com/airbnb/javascript#references--disallow-var
5.6. JavaScript 121

Notes, Release
5.7 Julia
5.7.1 Basic
Blog
some reading about julia blog
AOT
ref: https://juliacomputing.com/blog/2016/02/09/static-julia.html
• blocker of static analysis: eval, macro, generated
Calling C Functions
• Julia can call a c function without glue code
• ccall()
• Function in shared library only
Code Generation
julia> 𝜆(l) = l ^ 2𝜆 (generic function with 1 method)
julia> code_native(𝜆, (Float64,)).text
Filename: REPL[3]pushq %rbpmovq %rsp, %rbp
Source line: 1vmulsd %xmm0, %xmm0, %xmm0popq %rbpretqnopw (%rax,%rax)
julia> code_native(𝜆, (Int,)).text
Filename: REPL[3]pushq %rbpmovq %rsp, %rbp
Source line: 1imulq %rdi, %rdimovq %rdi, %raxpopq %rbpretqnopl (%rax)
122 Chapter 5. Language

Notes, Release
Flow Control
if
if...
elseif...
end
for
for i = [1, 2, 3]println(i)
end
for i in [1, 2, 3]println(i)
end
for i in 1:5println(i^2)
end
for i in Dict("foo" => 1, "bar" => 2)println(i)
end
for (k, v) in Dict("foo" => 1, "bar" => 2)println(k, ": ", v)
end
while
while ......
end
try
try...
catch e...
end
Function
Function will return the last expression. return is still allow.
5.7. Julia 123

Notes, Release
julia> function 𝜆(x, y)x + y
end𝜆 (generic function with 1 method)
julia> 𝜆(2, 5)7
Compact declaration:
julia> f(x, y) = x ^ yf (generic function with 1 method)
Return tuple:
julia> 𝜆(x, y) = x + y, x - y𝜆 (generic function with 1 method)
julia> 𝜆(2, 3)(5,-1)
Arbitrary positional arguments:
function 𝜆(args...)println(args) # tuple
end
Function call unpacking:
𝜆([1, 2, 3]...)
Default arguments:
function 𝜆(x, y=2, z=10)x ^ y + z
end
Keyword only arguments:
function 𝜆(x; y=2, z=10)x ^ y + z
end
𝜆(10; y=3)# or𝜆(10; :y=>3)
Keyword args function call:
𝜆(; y=2, z=10)
𝜆(; :y=>2, :z=>10)
𝜆(; (:y,2), (:z, 10))
124 Chapter 5. Language

Notes, Release
Functions
built-in
typeof:
julia> typeof(:foo)Symbol
in:
julia> a2×3 ArrayInt64,2:1 2 34 5 6
julia> 1 atrue
julia> 1 afalse
length and size:
julia> a2×3 ArrayInt64,2:1 2 34 5 6
julia> length(a)6
julia> size(a)(2, 3)
Anonymous Function
x -> x + 42
Multiple-Dispatch
julia> function 𝜆(a::Int, b::Int)a + b
end𝜆 (generic function with 1 method)
julia> function 𝜆(a::Float, b::FloatFloat16 Float32 Float64julia> function 𝜆(a::Float64, b::Float64)
a * bend
𝜆 (generic function with 2 methods)
5.7. Julia 125

Notes, Release
Valc
const c type Valc
Multiple dispatch c run-time
e.g.:
julia> f(::TypeValtrue) = 42f (generic function with 1 methods)
julia> f(Valtrue)42
idea: pattern matching
Meta Programming
Generated Functions
• special macro @generated
• return a quoted expression
• caller type code generation.
e.g.:
@generated function foo(x)# x denote type here# will show Int, Float64, String, ... etcprintln(x) # invoke at copmile, and only *once*return :(x * x)
• loop unroll ( type )
Macros in Base
• Base.@pure
• Base.@nexprs
• Base.@_inline_meta
Module
• each module has its own global scope
Performance Tips
Ref: https://docs.julialang.org/en/latest/manual/performance-tips/
126 Chapter 5. Language

Notes, Release
Avoid global variables
global var type compiler const optimize
Benchmark and Memory allocation
• builtin: @time
• BenchmarkTools
Avoid constainer with abstract type parameters
e.g: 𝑎 = 𝑅𝑒𝑎𝑙[] array Real , Real element size , a array of pointer points to Real object. Real objectallocation
Scope of Variables
Global Scope
• module
• baremodule
• REPL
global scope
Soft Local Scope parent scope, local keyword
• for
• while
• comprehensions
• try
• let
Hard Local Scope parent scope, assignement or local keyword
• function
• struct
• macro
No new scope
• begin
• if
5.7. Julia 127

Notes, Release
Standard Lib
Collections
Array
• fill("", 10): like [""] * 10 in python.
• mapslices(f, A, dims): Array slice f dims : slice
f 2× 3× 4× 5 dim = [3, 4] [i, j, :, :]
• foreach: map outcome
Iterations
An iterable object interface:
• start()
• done()
• next()
See also: http://docs.julialang.org/en/latest/manual/interfaces.html#man-interface-iteration-1
Date
julia> collect(Date("2017-1-1"):Date("2017-2-1"))32-element ArrayDate,1:2017-01-012017-01-022017-01-032017-01-042017-01-052017-01-062017-01-072017-01-082017-01-092017-01-102017-01-112017-01-122017-01-132017-01-142017-01-152017-01-162017-01-172017-01-182017-01-192017-01-202017-01-212017-01-222017-01-232017-01-242017-01-252017-01-262017-01-27
128 Chapter 5. Language

Notes, Release
2017-01-282017-01-292017-01-302017-01-312017-02-01
• TimeDate with StepRange:
DateTime(2017, 1, 1, 8, 0, 0):Dates.Hour(2):DateTime(2017, 1, 1, 20, 0, 0)
Filesystem
like python’s __file__:
dirname(@__FILE__)
• 0.6+ has @__DIR__
Network
• download
OS Utils
• withenv: temporary change env var(s):
withenv("PWD" => nothing) do # ``nothing`` can delete the varprintln(ENV["PWD"])
end
Broadcast
• broadcast_getindex: getindex ( broadcast )
Base.Random
• uuid1: time-based UUID
• uuid4
Type
• optional static type
5.7. Julia 129

Notes, Release
Float
• IEEE 754
• Inf:
julia> Inf > NaNfalse
• -Inf
• NaN:
julia> NaN == NaNfalse
julia> NaN != NaNtrue
# Notejulia> [1 NaN] == [1 NaN]false
functions
• isequal(x, y):
julia> isequal(1.0000000000000000000000001, 1.0000000000000001)true
# Notejulia> isequal(NaN, NaN)ture# diff from ``NaN == NaN``
julia> isequal([1 NaN], [1 NaN])true
• isnan(x)
Array
a = [1, 2, 3]
a[1] # 1a[end] # 3
with type:
a = Float64[1, 2, 3]a = Int[1, 2, 3]
130 Chapter 5. Language

Notes, Release
Matrix
a = [1 2 3]
a = [1 2 3; 4 5 6]
with type:
a = Int[1 2 3]
Range
julia> [1:10]1-element ArrayUnitRangeInt64,1:1:10
julia> [1:10;]10-element ArrayInt64,1:12345678910
julia> [1:3:20;]7-element ArrayInt64,1:14710131619
Dict
Dict()
d = Dict("foo" => 1, "bar" => 2)
keys(d)
values(d)
("foo" => 1) d
haskey(d, "foo")
5.7. Julia 131

Notes, Release
Pair
p = "foo" => 1p[1] == "foo"p[2] == 1
typeof
Int64:
julia> typeof(42)Int64
julia> typeof(Int64)DataType
julia> typeof(42)Int64
julia> supertype(Int64)Signed
julia> supertype(Signed)Integer
julia> supertype(Integer)Real
julia> supertype(Real)Number
julia> supertype(Number)Any
julia> supertype(Any)Any
String:
julia> typeof("test")String
julia> supertype(String)AbstractString
julia> supertype(AbstractString)Any
Class
type Catname::Stringage::Int
end
132 Chapter 5. Language

Notes, Release
Cat("meow", Int)
• note that :: is type annotation.
• a::C can read as “a is an instance of C”.
• concrete type cannot have subtype:
struct S...
end
• struct are immutable
Type Assertion
Assertion
(1 + 2)::Int
(1 + 2)::Float64 # error
Type Declaration
• @code_typed & @code_lowerd check type stability
• ResultTypes.jl backtrace
Annotation (Declaration)
julia> function 𝜆()x::Int8 = 10x
end𝜆 (generic function with 2 methods)
julia> 𝜆()10
julia> typeof(𝜆())Int8
only allowed in non-global scope:
function f()x::Int = 4y::Float64 = 3.14z::Float16 = 2
x, y, zend
5.7. Julia 133

Notes, Release
julia> f()(4, 3.14, Float16(2.0))
Return Type Annotation
On function definition:
julia> function 𝜆()::Int6442.0
end𝜆 (generic function with 1 method)
julia> 𝜆()42 # alway be converted to Int64
“This method must return a T”:
function f()::Int42
end
It can be parametrize as well:
function f(v::VectorT)::T where T <: Real...
end
It can be expression, e.g. using the return value of a function call:
function f(v::VectorT)::promote_type(T) where T <: Real...
end
It can be depend on argument:
function f(x)::eltype(x)...
end
Abstract Types
Declaration:
abstract type MyType endabstract type MyType <: MySupperType end
• <: can read as “is subtype of”:
julia> Int64 <: Inttrue
julia> Int64 <: Realtrue
134 Chapter 5. Language

Notes, Release
julia> Int64 <: Float64false
• function will be compiled on demand with concrete type:
f(x) = x * 2
means:
f(x::Any) = x * 2
If we invoke f(1), the function f(x::Int) = ... will be compiled.
Parametric Types
• like template in C++
• Generic programming: https://en.wikipedia.org/wiki/Generic_programming
Parametric Type
struct PointTx :: Ty :: T
end
concrete type, e.g. PointFloat64, PointString ...
Point id type object, Point... :
julia> PointFloat64 <: Pointtrue
julia> PointAbstractString <: Pointtrue
julia> PointAbstractVectorInt <: Pointtrue
concrete type :
julia> PointFloat64 <: PointStringfalse
Real Float64 :
julia> PointFloat64 <: PointRealfalse
Julia type parameter invariant invariant type parameter type Real vs Float64 invariant juliaPointFloat64 , 64-bits
covariant type :
PointFloat64 <: Point<:Realtrue
5.7. Julia 135

Notes, Release
contravariant:
PointReal <: Point>:Float64true
function argument PointT, T Real subtype :
# in julia both 0.5 and 0.6function fT<:Real(x::PointT)
# ...end
# in julia 0.6function f(x::Point<:Real)
# ...end
function f(x::PointT) where T<:Real# ...
end
Parametric Method
julia 0.5:
same_typeT(x::T, y::T) = true
# abstract typesame_typeT<:AbsType(x::T, y::T) = true
0.6:
same_type(x::T, y::T) where T = true
# abstract typesame_type(x::T, y::T) where T<:AbsType = true
Tuple Type
https://docs.julialang.org/en/latest/manual/types.html#Tuple-Types-1
NTuple Tuple type compact representation:
julia> NTuple3, Int TupleInt64,Int64,Int64
julia> NTuple6, Int NTuple6,Int64
• covariant
• Vararg Tuple covariant
julia> VarargInt, 3 <: VarargInteger, 3true
136 Chapter 5. Language

CHAPTER 6
Math
6.1 Calculus
6.1.1 Prepartion
Equation
• graphically
• analytically
• numerically
Intercepts (𝑎, 0) or (0, 𝑏)
• (𝑎, 0) x-intercept
• (0, 𝑏) y-intercept
• ...etc
intercept ,
Transformation of Functions
𝑦 = 𝑓(𝑥)
• 𝑦 = 𝑓(𝑥+ 𝑐)
• 𝑦 = 𝑓(𝑥) + 𝑐
• Reflection x-axis 𝑦 = −𝑓(𝑥)
• Reflection y-axis 𝑦 = 𝑓(−𝑥)
• Reflection 𝑦 = −𝑓(−𝑥)
Algebraic Functions function, algebraic operations
137

Notes, Release
Algebraic Operations
Transcendental Functions Algebraic Functions,
Composite Function
(𝑓 ∘ 𝑔) = 𝑓(𝑔(𝑥))
Elementary Functions
One variable composite with finite number of
• arithmetic operation: + − ×÷
• exponentials
• logarithms
• constants
6.1.2 Limits
1.2 Finding limits
𝑓
6.1.3 Total Derivative
Let 𝑓(𝑥, 𝑦) = 𝑥𝑦
𝑥, 𝑦 independent
𝑑𝑓
𝑑𝑥= 𝑦
𝑑𝑓
𝑑𝑦= 𝑥
𝑥, 𝑦 dependent 𝑦 = 𝑥
𝑓(𝑥, 𝑦) = 𝑥𝑦 = 𝑥2
𝑑𝑓
𝑑𝑥= 2𝑥
𝑑𝑓𝑑𝑥 chain rule
𝑑𝑓
𝑑𝑥=𝜕𝑓
𝜕𝑥+𝜕𝑓
𝜕𝑦
𝑑𝑦
𝑑𝑥
=𝜕𝑓
𝜕𝑥+𝜕𝑓
𝜕𝑦× 1
=𝜕𝑓
𝜕𝑥+ 𝑥𝑡𝑖𝑚𝑒𝑠1
= 𝑦 + 𝑥
= 2𝑥
dependent chain rule chain rule general form independent chain rule 0
138 Chapter 6. Math

Notes, Release
Ref
• https://en.wikipedia.org/wiki/Total_derivative
6.2 Differential Equations
6.3 Linear Algebra
6.3.1 Linear Transform
Ref: Chap 6
function map vector space: 𝑉 and 𝑊 .
𝑇 : 𝑉 →𝑊
• V T domain
• W T codomain
𝑇 () =
• image
• output set: preimage of
Definition
𝑉, 𝑊 vector space
𝑇 : 𝑉 →𝑊
1. 𝑇 (+ ) = 𝑇 () + 𝑇 (𝑡)
2. 𝑇 (𝑐) = 𝑐𝑇 ()
(P.294)
Counterexample
sin function Linear Transform
sin((𝜋
2) + (
𝜋
3)) = sin(
𝜋
2) + sin(
𝜋
3)
Matrix Form
𝑇 () = 𝐴
𝐴 shape (3, 2)
𝑇 : 𝑅2 → 𝑅3
image 𝐴
6.2. Differential Equations 139
Notes, Release
Rotation in 𝑅2
𝑇 : 𝑅2 → 𝑅2
𝐴 =
[cos 𝜃 − sin 𝜃sin 𝜃 cos 𝜃
]𝜃
Other Examples
• 𝑅3 x-y z = 0 linear transform
𝐴 =
⎡⎣1 0 00 1 00 0 0
⎤⎦• transpose linear transform
𝑇 : 𝑀𝑚,𝑛 →𝑀𝑛,𝑚
𝑇 (𝐴) : 𝐴𝑇
• Differential Operator 𝐷𝑥 𝑓 , 𝑓 ′ [𝑎, 𝑏] continuous linear transform.
– for polynomial function, 𝐷𝑥 𝑃𝑛 𝑃𝑛−1 linear transform
𝐷𝑥(𝑎𝑛𝑥𝑛 + · · ·+ 𝑎1𝑥+ 𝑎0) = 𝑛𝑎𝑛𝑥
𝑛−1 + · · ·+ 𝑎1
• Definite Integral polynomial function
𝑇 : 𝑃 → 𝑅 defined by
𝑇 (𝑝) =
∫ 𝑏
𝑎
𝑝(𝑥)𝑑𝑥
6.3.2 Parametric Representations of Lines
ref: https://www.khanacademy.org/math/linear-algebra/vectors-and-spaces/vectors/v/linear-algebra-parametric-representations-of-lines
vector vector
Let =
[21
]We define the line 𝐿 = 𝑐|𝑐 ∈ R
𝐿
R2
Let is a vector on R2
𝐿 = + 𝑐|𝑐 ∈ R
140 Chapter 6. Math

Notes, Release
Parametric Representations
,
𝐿 = + 𝑐(𝑎− )|𝑐 ∈ R (6.1)or(6.2)
𝐿 = 𝑏+ 𝑐(𝑎− )|𝑐 ∈ R(6.3)
6.4 Probability
6.4.1 Probability Axioms
Terms
𝑃 (𝐴) = 0.6
Input Event
Domain Event Space , Event
Output 0 - 1
Event Set, 0 or more samples
Sample outcome
Sample Space outcome Set 𝑆, 𝑃 (𝑆) = 1
Event Space sample(s) Event sample(s) Event Space
e.g. Sample Space 𝑆 = 𝑓𝑜𝑜, 𝑏𝑎𝑟, 𝑏𝑎𝑧 Event 𝑓𝑜𝑜, 𝑏𝑎𝑧 Event Space 8 Event 23 = 8 sample boolen
Axioms
1.
∀ Event 𝐴, 𝑃 (𝐴) ≥ 0
2.
𝑃 (𝑆) = 1
3.
Event 𝐴1, 𝐴2, . . . Mutual Exclude, then𝑃 (𝐴1 ∪𝐴2 ∪ . . . ) = 𝑃 (𝐴1) + 𝑃 (𝐴2) + . . .
6.4. Probability 141

Notes, Release
Properties
1. from axiom 3
𝐸 = 𝑜1, 𝑜2, . . . , 𝑛 (6.4)= 𝑜1 ∪ 𝑜2 ∪ · · · ∪ 𝑜𝑛(6.5)
𝑃 (𝐸) = 𝑃 (𝑜1) + 𝑃 (𝑜2) + · · ·+ 𝑃 (𝑜𝑛)(6.6)(6.7)
2.
𝑃 (𝜑) = 0
∵ 𝑆 ∩ 𝜑 = 𝜑 ∴ 𝑆, 𝜑 is Mutual Exclude
3.
𝑃 (𝐴) = 1− 𝑃 (𝐴𝑐)
4.
𝑃 (𝐴) = 𝑃 (𝐴−𝐵) + 𝑃 (𝐴 ∩𝐵)
5.
𝑃 (𝐴 ∪𝐵) = 𝑃 (𝐴) + 𝑃 (𝐵)− 𝑃 (𝐴 ∩𝐵)
6. 𝑆 𝐴
𝐶1, 𝐶2, . . . , 𝐶𝑛 Mutual Exclude, and𝐶2 ∪ 𝐶2 ∪ · · · ∪ 𝐶𝑛 = 𝑆
∀ Event 𝐴𝑃 (𝐴) = 𝑃 (𝐴 ∩ 𝐶1) + 𝑃 (𝐴 ∩ 𝐶2) + · · ·+ 𝑃 (𝐴 ∩ 𝐶𝑛)
7.
𝐴 ⊂ 𝐵, then 𝑃 (𝐴) < 𝑃 (𝐵)
8. Boole’s 𝐴𝑖
𝑃 (∪𝑛𝑖=1𝐴𝑖) ≤𝑛∑𝑖=1
𝑃 (𝐴𝑖)
9. Bonferroni’s 𝐴𝑖
𝑃 (∩𝑛𝑖=1𝐴𝑖) ≥ 1−𝑛∑𝑖=1
𝑃 (𝐴𝑐𝑖 )
142 Chapter 6. Math

Notes, Release
6.4.2 Conditional Probability
Sample Space
𝑃 of 𝑜𝑖 given 𝑌 :
𝑌 = 𝑜1, . . . , 𝑜𝑛 (6.8)
𝑃 (𝑜𝑖|𝑌 ) =𝑃 (𝑜𝑖)
𝑃 (𝑜1) + · · ·+ 𝑃 (𝑜𝑛)(6.9)
=𝑃 (𝑜𝑖)
𝑃 (𝑌 )(6.10)
𝑃 of 𝑋 given 𝑌 :
𝑋 = 𝑜1, 𝑜2, 𝑞1, 𝑞2 (6.11)𝑌 = 𝑜1, 𝑜2, 𝑜3(6.12)
𝑃 (𝑋|𝑌 ) = 𝑃 (𝑜1|𝑌 ) + 𝑃 (𝑜2|𝑌 )(6.13)
=𝑃 (𝑋 ∩ 𝑌 )
𝑃 (𝑌 )(6.14)
𝑃 (𝑞1|𝑌 ) = 0(6.15)
Product Rule
𝑃 (𝑋 ∩ 𝑌 ) = 𝑃 (𝑋|𝑌 )𝑃 (𝑌 ) (6.16)= 𝑃 (𝑌 |𝑋)𝑃 (𝑋)(6.17)
Properties
1.
𝑃 (𝑋|𝑌 ) =𝑃 (𝑋 ∩ 𝑌 )
𝑃 (𝑌 )≥ 0
2.
𝑃 (𝑌 |𝑌 ) =𝑃 (𝑌 ∩ 𝑌 )
𝑃 (𝑌 )= 1
3. 𝐴,𝐵 Mutual Exclude
𝑃 (𝐴 ∪𝐵|𝑌 ) =𝑃 (𝐴)
𝑃 (𝑌 )+𝑃 (𝐵)
𝑃 (𝑌 )= 𝑃 (𝐴|𝑌 ) + 𝑃 (𝐵|𝑌 )
Total Probability
Properties (6)
𝑃 (𝐴) = 𝑃 (𝐴 ∩ 𝐶1) + 𝑃 (𝐴 ∩ 𝐶2) + · · ·+ 𝑃 (𝐴 ∩ 𝐶𝑛) (6.18)= 𝑃 (𝐴|𝐶1)𝑃 (𝐶1) + 𝑃 (𝐴|𝐶2)𝑃 (𝐶2) + · · ·+ 𝑃 (𝐴|𝐶𝑛)𝑃 (𝐶𝑛)(6.19)
6.4. Probability 143

Notes, Release
Bayes’ Rule
𝑃 (𝐶𝑗 |𝐴) =𝑃 (𝐴|𝐶𝑗)𝑃 (𝐶𝑗)
𝑃 (𝐴|𝐶1)𝑃 (𝐶1) + · · ·+ 𝑃 (𝐴|𝐶𝑛)𝑃 (𝐶𝑛)
proof:
𝑃 (𝐶𝑗 |𝐴) =𝑃 (𝐶𝑗 ∩𝐴)
𝑃 (𝐴)(6.20)
=𝑃 (𝐴 ∩ 𝐶𝑗)𝑃 (𝐴)
(6.21)
=𝑃 (𝐴|𝐶𝑗)𝑃 (𝐶𝑗)
𝑃 (𝐴)(6.22)
By Total Probability =𝑃 (𝐴|𝐶𝑗)𝑃 (𝐶𝑗)∑𝑛𝑖=1 𝑃 (𝐴|𝐶𝑖)𝑃 (𝐶𝑖)
(6.23)
6.5 Statistic
6.5.1 Autocorrelation
serial correlation
Specific form: - unit root processes - trend stationary processes - autoregressive processes - moving average processes
Def
random process autocorrelation Pearson Correlation
𝑅(𝑠, 𝑡) =𝐸[(𝑋𝑡 − 𝜇𝑡)(𝑋𝑠 − 𝜇𝑠)]
𝜎𝑡𝜎𝑠
time series autocorrelation function (ACF)
𝐶𝑜𝑟𝑟(𝑦𝑡, 𝑦𝑡−𝑘)
𝑘 lag
Partial Autocorrelation Function (PACF)
• conditional correlation (?)
• pacf in StatsBase
Reference
• http://juliastats.github.io/StatsBase.jl/stable/signalcorr.html#StatsBase.autocor
• https://en.wikipedia.org/wiki/Autocorrelation
• PACF: https://onlinecourses.science.psu.edu/stat510/node/62
• https://en.wikipedia.org/wiki/Partial_correlation
144 Chapter 6. Math

Notes, Release
6.5.2 Autoregressive Model
Def
AR(1)
𝑦𝑡 = 𝛽0 + 𝛽1𝑦𝑡−1 + 𝜖𝑡
order of autoregression:
AR(k)
𝑦𝑡 = 𝛽0 + 𝛽1𝑦𝑡− 1 + · · ·+ 𝛽𝑘𝑦𝑡−𝑘 + 𝜖𝑡
Examples
AR(1) plot
using Gadfly, MarketDataplot(x=cl.values[1:end-1], y=cl.values[2:end])
linear model
Reference
• https://onlinecourses.science.psu.edu/stat501/node/358
6.5.3 Durbin-Waston Test
residual (prediction error) Autocorrelation
Def
𝑑 =
∑𝑇𝑡=2(𝑒𝑡 − 𝑒𝑡−1)2∑𝑇
𝑡=1 𝑒2𝑡
𝑇 data
𝑑 𝑑 > 2 error
Reference
• https://en.wikipedia.org/wiki/Durbin%E2%80%93Watson_statistic
6.5.4 Empirical Risk Minimization
In context of supervised learning, loss function 𝐿(ℎ(𝑥), 𝑦) ℎ(𝑥) approximator
risk expectation of loss function
6.5. Statistic 145

Notes, Release
𝑅(ℎ) = 𝐸(𝐿(ℎ(𝑥), 𝑦)) =
∫𝐿(ℎ(𝑥), 𝑦)𝑑𝑝(𝑥, 𝑦)
where 𝑝(𝑥, 𝑦) is the join probility distribution.
optimal ℎ*
ℎ* = arg minℎ∈𝐻
𝑅(ℎ)
p(x, y)
𝑅𝑒𝑚𝑝(ℎ) =1
𝑚
𝑚∑𝑖
𝐿(ℎ(𝑥𝑖), 𝑦𝑖)
Empirical Risk
Examples
MSE
Reference
• https://en.wikipedia.org/wiki/Empirical_risk_minimization
6.5.5 Gaussian Function
bell curve
Def
Generic univariable form:
𝑓(𝑥) = 𝛼𝑒− (𝑥−𝛽)2
2𝛾2
Where 𝛼, 𝛽, 𝛾 ∈ R
• 𝛼 curve peak
• 𝛽 peak
• 𝛾 (standard diviation) bell
Examples
function f(a, b, c)x -> a * e^(-((x - b)^2) / (2c^2))
end
using UnicodePlots
lineplot(f(2, 0, 3), -10, 10)
146 Chapter 6. Math

Notes, Release
Probility Density Function
𝒩 (𝑥) =1
𝜎√
2𝜋𝑒−
(𝑥−𝜇)2
2𝜎2
∫𝑓(𝑥) = 1∫ ∞
−∞𝛼𝑒
− (𝑥−𝛽)2
2𝛾2 𝑑𝑥 = 1
D-dimensional form:
𝒩 (𝑥) =1
(2𝜋)𝐷2 |Σ| 12
𝑒−(−)𝑇 Σ−1(−)
2
where Σ is the covariance matrix
Density Estimation
dataset 𝒟 data distribution gaussian 𝜇, 𝜎 dataset observation i.i.d.
𝑝(𝒟|𝜇, 𝜎) =∏𝑥∈𝒟𝒩 (𝑥|𝜇, 𝜎)
𝒩 (𝑥|𝜇, 𝜎) likelihood function ℒ(𝑑𝑎𝑡𝑎|𝑚𝑜𝑑𝑒𝑙)
maximum likelihood 𝜇, 𝜎 density function
log likelihood function underflow ()
𝑝(𝒟|𝜇, 𝜎) =∏𝒩 (𝑥|𝜇, 𝜎) (6.24)
⇒ln 𝑝(𝒟|𝜇, 𝜎) = ln∏𝒩 (𝑥|𝜇, 𝜎) (6.25)
⇒ =∑
ln𝒩 (𝑥|𝜇, 𝜎) (6.26)
⇒ =∑
ln( 1
𝜎√
2𝜋𝑒−
(𝑥−𝜇)2
2𝜎2
)(6.27)
⇒ =∑
− (𝑥− 𝜇)2
2𝜎2+ ln
1
𝜎√
2𝜋
(6.28)
⇒ = −∑ (𝑥− 𝜇)2
2𝜎2−𝑁 ln𝜎
√2𝜋 (6.29)
⇒ = −∑ (𝑥− 𝜇)2
2𝜎2−𝑁 ln𝜎 − 𝑁
2ln 2𝜋 (6.30)
maximum log likelihood
𝜇𝑀𝐿 =1
𝑁
𝑁∑𝑛
𝑥𝑛
data simple mean
𝜎2𝑀𝐿 =
1
𝑁
𝑁∑𝑛
(𝑥𝑛 − 𝜇𝑀𝐿)2
simple variance
𝜎𝑀𝐿
1
𝑁 − 1
𝑁∑𝑛
(𝑥𝑛 − 𝜇𝑀𝐿)2
6.5. Statistic 147

Notes, Release
Reference
• https://en.wikipedia.org/wiki/Gaussian_function
6.5.6 Misspecification
• model: curve linear model fitting
Reference
• https://en.wikipedia.org/wiki/Specification_(regression)
6.5.7 Nonparametric Statistics
Def
• data distribution distribution free normal distribution
• distribution free methods:
– descriptive statistics: e.g. average
– statistical inference: e.g. distribution, mean... etc
• model
– nonparametric regression
– non-parametric hierarchical Bayesian models
Properties
• ranking 1~5
• assumption -> robust
Nonparametric Models
priori, data model
non-parametric
Examples
• histogram probility distribution
• kernel density estimation
• KNN
• neural networks
148 Chapter 6. Math

Notes, Release
Reference
• https://en.wikipedia.org/wiki/Nonparametric_statistics
6.5.8 Partial Correlation
random variable / correlation
Example
• 𝑧 = 0, then 𝑥 = 2𝑦
• 𝑧 = 1, then 𝑥 = 5𝑦
julia> df = DataFrame(x = [2, 6, 10, 20], y = [1, 3, 2, 4], z = [0, 0, 1, 1])4×3 DataFrames.DataFrame| Row | x | y | z |----------| 1 | 2 | 1 | 0 || 2 | 6 | 3 | 0 || 3 | 10 | 2 | 1 || 4 | 20 | 4 | 1 |
𝑥, 𝑦 reference 𝑧
pearson correlation:
julia> cor(df[:x], df[:y])0.8356578380810945
partial correlation 0.904194430179465:
"""pcor(x, y, y)
Partial correlation via least square method
E.g:```juliajulia> df4×3 DataFrames.DataFrame| Row | x | y | z |---------------| 1 | 2 | 1 | 0 || 2 | 6 | 3 | 0 || 3 | 10 | 2 | 1 || 4 | 20 | 4 | 1 |
julia> pcor([2, 6, 10, 20], [1, 3, 2, 4], [0, 0, 1, 1])0.904194430179465```"""function pcor(x::Vector, y::Vector, z::Vector)
n = length(x)
# Normal Equation Method#= w_x = pinv(z' * z) * z' * x =#
6.5. Statistic 149

Notes, Release
#= w_y = pinv(z' * z) * z' * y =#w_x = first(z \ x)w_y = first(z \ y)
e_x = x .- w_x * ze_y = y .- w_y * z
(n * sum(e_x .* e_y) - sum(e_x) * sum(e_y)) / ((sqrt(n * sum(e_x.^2) - sum(e_x)^2)) * (sqrt(n * sum(e_y.^2) - sum(e_y)^2)))
end
Reference
• https://en.wikipedia.org/wiki/Partial_correlation
6.5.9 Pearson Correlation
var 𝑋 and 𝑌 linear correlation
Def
𝜌𝑋,𝑌 =𝑐𝑜𝑣(𝑋,𝑌 )
𝜎𝑋𝜎𝑌=𝐸[(𝑋 − 𝜇𝑋)(𝑌 − 𝜇𝑌 )]
𝜎𝑋𝜎𝑌
• 𝑋 − 𝜇𝑋 𝑁𝜎𝑋
• 𝑌 − 𝜇𝑌 𝑀𝜎𝑌
• pearson correlation 𝐸[𝑁 ×𝑀 ]
– FIXME: 𝐸[𝑁 ×𝑀 ] 1 ~ -1
• pearson correlation 1 -1
Reference
• https://en.wikipedia.org/wiki/Pearson_correlation_coefficient
150 Chapter 6. Math

CHAPTER 7
Project
7.1 binutils
7.1.1 objdump
hello.c
int main()
return 0;
$ objdump -DxS hello.ohello.o: file format elf64-x86-64-freebsdhello.oarchitecture: i386:x86-64, flags 0x00000011:HAS_RELOC, HAS_SYMSstart address 0x0000000000000000
Sections:Idx Name Size VMA LMA File off Algn0 .text 00000008 0000000000000000 0000000000000000 00000040 2**4CONTENTS, ALLOC, LOAD, READONLY, CODE1 .comment 00000053 0000000000000000 0000000000000000 00000048 2**0CONTENTS, READONLY2 .note.GNU-stack 00000000 0000000000000000 0000000000000000 0000009b 2**0CONTENTS, READONLY3 .eh_frame 00000038 0000000000000000 0000000000000000 000000a0 2**3CONTENTS, ALLOC, LOAD, RELOC, READONLY, DATASYMBOL TABLE:0000000000000000 l df *ABS* 0000000000000000 hello.c0000000000000000 l d .text 0000000000000000 .text0000000000000000 g F .text 0000000000000008 main
151
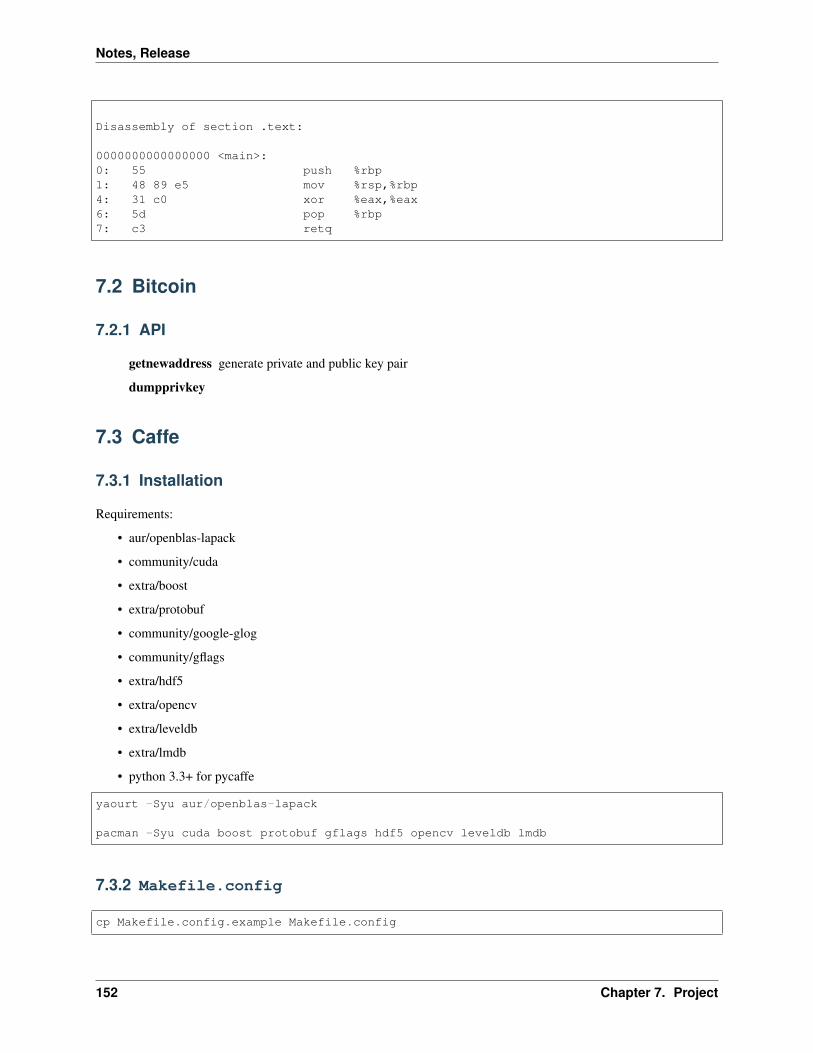
Notes, Release
Disassembly of section .text:
0000000000000000 <main>:0: 55 push %rbp1: 48 89 e5 mov %rsp,%rbp4: 31 c0 xor %eax,%eax6: 5d pop %rbp7: c3 retq
7.2 Bitcoin
7.2.1 API
getnewaddress generate private and public key pair
dumpprivkey
7.3 Caffe
7.3.1 Installation
Requirements:
• aur/openblas-lapack
• community/cuda
• extra/boost
• extra/protobuf
• community/google-glog
• community/gflags
• extra/hdf5
• extra/opencv
• extra/leveldb
• extra/lmdb
• python 3.3+ for pycaffe
yaourt -Syu aur/openblas-lapack
pacman -Syu cuda boost protobuf gflags hdf5 opencv leveldb lmdb
7.3.2 Makefile.config
cp Makefile.config.example Makefile.config
152 Chapter 7. Project

Notes, Release
Patch Makefile.config:
--- Makefile.config.example 2016-03-24 19:34:31.112015456 +0800+++ Makefile.config 2016-03-24 20:40:14.378707671 +0800@@ -5,12 +5,12 @@# USE_CUDNN := 1
# CPU-only switch (uncomment to build without GPU support).-# CPU_ONLY := 1+CPU_ONLY := 1
# uncomment to disable IO dependencies and corresponding data layers-# USE_OPENCV := 0-# USE_LEVELDB := 0-# USE_LMDB := 0+USE_OPENCV := 1+USE_LEVELDB := 1+USE_LMDB := 1
# uncomment to allow MDB_NOLOCK when reading LMDB files (only if necessary)# You should not set this flag if you will be reading LMDBs with any
@@ -25,7 +25,7 @@# CUSTOM_CXX := g++
# CUDA directory contains bin/ and lib/ directories that we need.-CUDA_DIR := /usr/local/cuda+CUDA_DIR := /opt/cuda# On Ubuntu 14.04, if cuda tools are installed via# "sudo apt-get install nvidia-cuda-toolkit" then use this instead:# CUDA_DIR := /usr
@@ -43,7 +43,7 @@# atlas for ATLAS (default)# mkl for MKL# open for OpenBlas
-BLAS := atlas+BLAS := open# Custom (MKL/ATLAS/OpenBLAS) include and lib directories.# Leave commented to accept the defaults for your choice of BLAS# (which should work)!
@@ -61,8 +61,8 @@
# NOTE: this is required only if you will compile the python interface.# We need to be able to find Python.h and numpy/arrayobject.h.
-PYTHON_INCLUDE := /usr/include/python2.7 \- /usr/lib/python2.7/dist-packages/numpy/core/include+# PYTHON_INCLUDE := /usr/include/python2.7 \+# /usr/lib/python2.7/dist-packages/numpy/core/include# Anaconda Python distribution is quite popular. Include path:# Verify anaconda location, sometimes it's in root.# ANACONDA_HOME := $(HOME)/anaconda
@@ -71,9 +71,9 @@# $(ANACONDA_HOME)/lib/python2.7/site-packages/numpy/core/include \
# Uncomment to use Python 3 (default is Python 2)-# PYTHON_LIBRARIES := boost_python3 python3.5m-# PYTHON_INCLUDE := /usr/include/python3.5m \-# /usr/lib/python3.5/dist-packages/numpy/core/include+PYTHON_LIBRARIES := boost_python3 python3.5m+PYTHON_INCLUDE := /usr/include/python3.5m \
7.3. Caffe 153

Notes, Release
+ /usr/lib/python3.5/dist-packages/numpy/core/include
# We need to be able to find libpythonX.X.so or .dylib.PYTHON_LIB := /usr/lib
7.4 Chewing Editor
7.4.1 Installation
My env is Arch Linux.
Requirements
QT = 5
• qt5-tools
• qt5-base
pacman -Ss qt5-base qt5-tools
qt5-tools will provide /usr/lib/qt/bin/lrelease. When building chewing-editor, we will need it.
7.4.2 Issues
#43 - Use system gtest
If gtest do not ship with share library, the default cmake module, FindGTest, will raise error.
ref:
• module FindGTest source
• https://github.com/dmonopoly/gtest-cmake-example
• http://stackoverflow.com/questions/9689183/cmake-googletest
• http://stackoverflow.com/questions/21237341/testing-with-gtest-and-gmock-shared-vs-static-libraries
• http://stackoverflow.com/questions/10765885/how-to-install-your-custom-cmake-find-module
• Ubuntu libgtest-dev package list It’s source only.
7.5 Ethereum
7.5.1 Create Private Network
• Use go-ethereum as client
pkg install net-p2p/go-ethereum
mkdir ~/.ethapc/
154 Chapter 7. Project

Notes, Release
Create custom genesis block:
cat ~/.ethapc/genesis.json
"alloc" : ,"coinbase" : "0x0000000000000000000000000000000000000000","difficulty" : "0x20000","extraData" : "","gasLimit" : "0x2fefd8","nonce" : "0x0000000000000042","mixhash" : "0x0000000000000000000000000000000000000000000000000000000000000000
→˓","parentHash" : "0x0000000000000000000000000000000000000000000000000000000000000000
→˓","timestamp" : "0x00"
Flags
geth --nodiscover --maxpeers 0 --identity "MyNodeName" --datadir=~/.ethapc --→˓networkid 42
Attach
geth attach ipc:~/.ethapc/geth.ipc
7.6 GnuPG
7.6.1 Cipher
Def An algorithm for performing encryption
Cipher vs Code
Code
• using codebook
• the ciphertext contain all the information of original plaintext
Cipher
• usually depends on a key (or says cryptovariable)
1. https://en.wikipedia.org/wiki/Cipher
7.6.2 Reference
1. https://futureboy.us/pgp.html
2. http://secushare.org/PGP
7.6. GnuPG 155

Notes, Release
7.7 LaTeX
𝐿A𝑇E𝑋
7.7.1 Command
\command[optional param]param
• command starts with \
• whitespace is ignored after commands.
• force whitespace after commands
𝑇E𝑋𝑎𝑛𝑑𝐿A𝑇E𝑋.
7.7.2 Comments
Hello % here is commen, World
e.g.:
𝐻𝑒𝑙𝑙𝑜,𝑊𝑜𝑟𝑙𝑑
7.7.3 File Structure
.tex
\documentclass... % LaTeX2e doc required This\usepackage... % setup
\titletitle\authorIblis Lin
\begindocument
content
\enddocument
• .sty: 𝐿A𝑇E𝑋 package.
7.7.4 Line/page breaking
paragraph a set of words to convey the same, coherent idea. Placing blank line between two paragraph.
line break
• just use \\ or \newline in same paragraph.
• \\*: prohibit page breaking after this new line
• \pagebreak
156 Chapter 7. Project

Notes, Release
7.7.5 Quoting
`` for open'' for close
e.g:
``quoting some text''
7.7.6 Tilde
\~
http://foo/\~bar
7.7.7 Accents
H\^otel, na\"\i ve, \’el\‘eve,\\sm\o rrebr\o d, !‘Se\~norita!,\\Sch\"onbrunner Schlo\ssStra\ss e
7.7.8 TikZ
Preamble:
\usepackagetikz
\begintikzpicture\draw (0, 0) to (2, 2) -- (4, 0) -- cycle;\draw (2, 2) -- (1, 0);
\endtikzpicture
Plot function:
\draw[green, ultra thick, domain=0:0.5] plot (\x, 0.025+\x+\x*\x);
Plot label:
\node [above left] at (1, 1) $x$;
7.8 libuv
Ref: https://nikhilm.github.io/uvbook/index.html
• Async, event-driven style of programming.
• event loop: uv_run()
• I/O blocking : event-loop approach
7.8. libuv 157

Notes, Release
– read, write I/O thread (or thread pool)
– libuv async, non-blocking OS event subsystem:
* Async: X file X
* Non-blocking: X file free to do other task.
7.9 Libvirt
7.9.1 Network
On Arch:
sudo pacman -Syu ebtables dnsmasq firewalldsudo systemctl start firewalldsudo systemctl enable firewalldsudo systemctl restart libvirtd
• Ref: http://demo102.phpcaiji.com/article/bagdcea-libvirt-failed-to-initialize-a-valid-firewall-backend.html
7.10 Make
After FreeBSD 10.0, the implementation of make(1) is bmake(1). pmake(1) is deprecated.
ref: http://www.crufty.net/help/sjg/bmake.html
7.10.1 bmake and gmake compatible Makefile
Quote from stackoverflow:
You could put your GNU-specific stuff in GNUmakefile, your BSD-specific stuff in BSDmakefile,and your common stuff in a file named Makefile.common or similar. Then include Makefile.common at the very beginning of each of the other two. Downside is, now you have 3 makefiles insteadof 2. Upside, you’ll only be editing 1.
bmake
The file BSDmakefile has highest priority.
-[/usr/share/mk]| [Venv(py3)] [-- INSERT --]-[iblis@abeing]% grep BSDmakefile /usr/share/mk/sys.mk.MAKE.MAKEFILE_PREFERENCE= BSDmakefile makefile Makefile
Ref
https://stackoverflow.com/questions/3848656/bsd-make-and-gnu-make-compatible-makefile
158 Chapter 7. Project

Notes, Release
7.10.2 bmake Suffix Rules
man make
and search SUFFIXES
.SUFFIXES: .o
.c.o:cc -o $.TARGET -c $.IMPSRC
7.11 MXNet
7.11.1 Compile
Compile on my machine:
mkdir buildcd buildcmake .. -DCUDA_HOST_COMPILER=/opt/cuda/bin/gcc
7.11.2 MXNet.jl
Get network weight
model.arg_params -> DictSymbol => NDArray
Extract data from NDArray
Julia wrapper MXNet NDArray MXNet tensor GPU mx.copy!(Array, NDArray) :
# w is NDArrayarr = zeros(eltype(w), size(w))mx.copy!(arr, w)
or breifly:
# warr = copy(w)
Show net layers:
julia> mx.list_arguments(net)24-element ArraySymbol,1::data:fullyconnected0_weight:fullyconnected0_bias:fullyconnected1_weight:fullyconnected1_bias:fullyconnected2_weight:fullyconnected2_bias:fullyconnected3_weight:fullyconnected3_bias:fullyconnected4_weight:fullyconnected4_bias
7.11. MXNet 159

Notes, Release
:fullyconnected5_weight:fullyconnected5_bias:fullyconnected6_weight:fullyconnected6_bias:fullyconnected7_weight:fullyconnected7_bias:fullyconnected8_weight:fullyconnected8_bias:fullyconnected9_weight:fullyconnected9_bias:fullyconnected10_weight:fullyconnected10_bias:label
7.12 nftable
git clone git://git.netfilter.org/nftables
# load samplenft -f files/nftables/ipv4-filter
7.12.1 Add
nft add rule ip filter input ip saddr '!= 1.2.0.0/16' tcp dport 8545 dropnft list table filter -a
7.12.2 Ref
• https://home.regit.org/netfilter-en/nftables-quick-howto/
7.13 NTP
7.13.1 Arch
Ref: https://wiki.archlinux.org/index.php/Systemd-timesyncd
It’s already included in Systemd:
sudo timedatectl set-ntp truetimedatectl status
That’s all.
160 Chapter 7. Project

Notes, Release
7.14 OpenCL
7.14.1 Task Parallel
Via Native Kernel, and benifit from some vector types plus SIMT
7.15 pacman
/etc/pacman.conf:
IgnorePkg = linux awesome deluge nvidia nvidia-utils
7.16 sudo
Some distro, like manjaro, override the rule via /etc/sudoers.d/*. So changing the config via visudo maynot work.
7.17 TensorFlow
• General computing platform
Tensor The n-dimension data
Flow The operation
• written in CPP
• offer python interface via SWIG
• GPU support
– Optional
– Linux only
– Cuda Toolkit >= 7.0
7.17.1 Installation
• require gcc
• clone with submodule:
$ git clone --recurse-submodules https://github.com/tensorflow/tensorflow
• build system: Bazel
• build python wheel package:
bazel build -c opt //tensorflow/tools/pip_package:build_pip_package -j 6
• SWIG:
7.14. OpenCL 161

Notes, Release
pacman -S swig
• Pypi:
pip install numpy wheel
Configuring GPU
-[iblis@pandapc Oops]% ./configurePlease specify the location of python. [Default is /home/iblis/venv/py35/bin/python]:Do you wish to build TensorFlow with GPU support? [y/N] yGPU support will be enabled for TensorFlowPlease specify which gcc nvcc should use as the host compiler. [Default is /sbin/→˓gcc]: /usr/bin/gccPlease specify the Cuda SDK version you want to use, e.g. 7.0. [Leave empty to use→˓system default]: 7.5.18Please specify the location where CUDA 7.5.18 toolkit is installed. Refer to README.→˓md for more details. [Default is /usr/local/cuda]: /opt/cudaPlease specify the Cudnn version you want to use. [Leave empty to use system→˓default]: 5.0.4Please specify the location where cuDNN 5.0.4 library is installed. Refer to README.→˓md for more details. [Default is /opt/cuda]:Please specify a list of comma-separated Cuda compute capabilities you want to build→˓with.You can find the compute capability of your device at: https://developer.nvidia.com/→˓cuda-gpus.Please note that each additional compute capability significantly increases your→˓build time and binary size.[Default is: "3.5,5.2"]: 5.0Setting up Cuda includeSetting up Cuda lib64Setting up Cuda binSetting up Cuda nvvmConfiguration finished
Patches
• cc_configure.bzl: For bazel bazel <= 0.2.1
cd tensorflow/tensorflowwget https://github.com/bazelbuild/bazel/blob/master/tools/cpp/cc_configure.→˓bzl
• WORKSPACE
diff --git a/WORKSPACE b/WORKSPACEindex d3e01b7..033685b 100644--- a/WORKSPACE+++ b/WORKSPACE@@ -20,6 +20,9 @@ tf_workspace()load("//tensorflow:tensorflow.bzl", "check_version")check_version("0.1.4")
+# load("//tensorflow:cc_configure.bzl", "cc_configure")
162 Chapter 7. Project

Notes, Release
+# cc_configure()+# TENSORBOARD_BOWER_AUTOGENERATED_BELOW_THIS_LINE_DO_NOT_EDIT
new_git_repository()
• third_party/gpus/crosstool/CROSSTOOL
diff --git a/third_party/gpus/crosstool/CROSSTOOL b/third_party/gpus/crosstool/→˓CROSSTOOLindex a9f26f5..1bc2138 100644--- a/third_party/gpus/crosstool/CROSSTOOL+++ b/third_party/gpus/crosstool/CROSSTOOL@@ -57,6 +105,8 @@ toolchain # used by gcc. That works because bazel currently doesn't track files at# absolute locations and has no remote execution, yet. However, this will need# to be fixed, maybe with auto-detection?+ cxx_builtin_include_directory: "/home/iblis/git/tensorflow/third_party/gpus/cuda/→˓include"+ cxx_builtin_include_directory: "/opt/cuda/include"
7.17.2 2D Conv
input 128x128 rgb 3 channel input tensor 128x128x3
filter 5x5 64 filter -> filter tensor 5x5x64
conv 128x128x3x64 just guessing
7.18 Xorg
7.18.1 Trackball
Get the id:
xinput list
xinput --set-prop 12 "libinput Middle Emulation Enabled" 1
7.19 zsh
7.19.1 Bump Up the File Descriptor Limit
We can set the soft limit up to hard limit.
Check the hard limit:
$ ulimit -Hn4096
Then check the soft limit:
7.18. Xorg 163

Notes, Release
$ ulimit -Sn1024
Bump up it:
$ ulimit -Sn unlimited$ ulimit -Sn4096
7.20 Compiler
7.20.1 Dragon book
Compilers Principles, Techniques and Tools
Introduction
Parts of compiler:
• Front-end
– generate IR (itermediate representation)
–
• Mid-end
• Back-end
–
Generate Object File
prog.c -> pre-proccessing -> prog.s
Quote from clang(1):
Stage Selection Options
-E Run the preprocessor stage.
-fsyntax-only Run the preprocessor, parser and type checking stages.
-S Run the previous stages as well as LLVM generation andoptimization stages and target-specific code generation,producing an assembly file.
-c Run all of the above, plus the assembler, generating a tar-get ”.o” object file.
Structure of Compiler
• token stream
• AST
164 Chapter 7. Project

Notes, Release
• IR: three address code. optimizer IR
• target native code
• symbol table
Phases and Passes
phase compiler
pass phase group compiler read file -> write file
front-end pass
• lexical analysis output token
• syntax analysis or parsing
• semantic analysis type type checking;
type conversion – coercions
• IR code gen:
– syntax tree is a form of IR
– three address code
• symbol table management
optional pass
• optimization
– data-flow optimizations
– instruction level parallelism, e.g. re-order instruction, SIMD
– proccessor level parallelism
– optimization for memory hierarchy
back-end pass
• code gen
Toolchains
parser generator
• PEG.js
• peg
• YACC
• Bison
scanner generator
• lex
• flex
syntax-directed translation engine
7.20. Compiler 165

Notes, Release
code-generator generator
data-flow analysis engine
compiler-contruction toolkits
• RPython
Misc
• compiler-rt platform (e.g. x86 & amd64) object file portability. cross-compiling
• low-level resource allocation C register keyword programmer register register compiler registermanagement policy
lex
definition%%transition ruls%%user defined subroutine
Context Free Grammar
sentence non-terminal
Ambiguous Grammar
Def sentence parse tree
Example operator precedence 1 + 2× 3 parse?
associativity 1 + 2 + 3
Left Recursion
immediate left recursion Eliminating formula: why?
Parsing
LL
LR
Viable Prefix Handle ( Handle)
166 Chapter 7. Project

Notes, Release
Semantic Analysis
context-free grammer :
• context-sensitive grammer
• context-free grammer + attribute
2, - SDD: Syntax-Directed Definition
• SDT: Syntax-Directed Translation scheme
7.20. Compiler 167

Notes, Release
168 Chapter 7. Project

169

Notes, Release
CHAPTER 8
Trading
8.1 TXF
8.1.1 2016-01-27
long-term
170 Chapter 8. Trading

Notes, Release
inter-day
• vol avg(10), attempt to go up, higher va => slowing
• vol avg(10), attempt to down, lower va => non-facilitate? slowing, balancing?
• top @ 7850?
• buttom @ 7600 -> 7640?
short-term
• poc keep moving lower
• early selling tail from 7859 to 7835: 24point
• buying tail quite smaller than selling
• the high/low point support by previous VA
•
– 70
– previous VA: 50 point
•
–
– new seller
8.1. TXF 171

Notes, Release
• 10 am & 12
– seller 7859 -> 7834
– HVA
– slowing
– HVA 2
•
– seller covering
– buyer: 7778 -> 7790: 12 points
30 K
• buyer has logger time-frame
8.2 Market in Profile
8.2.1 Lagger
• non-forced convering, lagger
8.2.2 5/13
• => timeframe
• Peter
– Day TimeFrame (DTF)
– Other TimeFrame (OTF)
Scalper
bid-ask spread
DTF
Day TimeFrame
zero position
Behavior
price /
e.g. DTF buy at 4.99 vol 20 -> 4.98 vol 20 -> 4....
DTF OTF buyer DTF position
Side effect DTF liquidity
172 Chapter 8. Trading

Notes, Release
Other TimeFrame
Short-Term Trader
Short-Term
Intermediate-Term Trader
Long-Term Trader
8.2.3 Resting inside a Trend
2016/05
resting bracket
trend
8.2. Market in Profile 173

Notes, Release
174 Chapter 8. Trading

CHAPTER 9
Web
9.1 JWT
9.1.1 Resources
• http://www.slideshare.net/stormpath/building-secure-user-interfaces-with-jwts
9.2 Vue
• MVVM pattern
9.2.1 Vue Instance
• data property proxy
• properties created by vue will be prefixed with $. e.g.: vm.$el, vm.$watch
• Instance hook: mounted ... etc.
9.2.2 Slots
Child component:
divh2 I'm the child title
slot| This will only be displayed| if there is no content to be distributed. // fallback content
175

Notes, Release
Parent::
div h1 I’m the parent title
child-component p This is some original content p This is some more original content
Render:
divh1 I'm the parent title
divh2 I'm the child title
p This is some original contentp This is some more original content
176 Chapter 9. Web

CHAPTER 10
Reading
10.1 Analysis of Financial Time Series
10.1.1 Intro
Assets Returns Scale-free feature. return series price series return definitions.
Simple Gross Return
Single period return.
1 +𝑅𝑡 =𝑃𝑡𝑃𝑡−1
period ,
Multiperiod Simple Return
Hold 𝑘 period. A.k.a compound return.
1 +𝑅𝑡[𝑘] =𝑃𝑡𝑃𝑡−𝑘
=𝑃𝑡𝑃𝑡−1
× 𝑃𝑡−1
𝑃𝑡−2× · · · × 𝑃𝑡−𝑘+1
𝑃𝑡−𝑘
= (1 +𝑅𝑡)(1 +𝑅𝑡−1) . . . (1 +𝑅𝑡−𝑘+1)
=
𝑘−1∏𝑖=0
(1 +𝑅𝑡−𝑖)
Multiperiod single period
Annualized Returns
If we hold 𝑘 years.
𝐴𝑛𝑛𝑢𝑎𝑙𝑖𝑧𝑒𝑑𝑅𝑡[𝑘] = (𝑅𝑡[𝑘])1𝑘 − 1
177

Notes, Release
𝑅𝑡[𝑘] geometric mean, multiperiod period
𝐴𝑛𝑛𝑢𝑎𝑙𝑖𝑧𝑒𝑑𝑅𝑡[𝑘] = exp
[1
𝑘
𝑘−1∑𝑖=0
ln 1 +𝑅𝑡−𝑖
]− 1
Taylor expansion (but why?)
𝐴𝑛𝑛𝑢𝑎𝑙𝑖𝑧𝑒𝑑𝑅𝑡[𝑘] =1
𝑘
𝑘−1∑𝑖=1
𝑅𝑡−𝑗
Countinuous Compounding
• proof
Net value of a asset 𝐴
𝐴 = 𝐶𝑒𝑟𝑚
𝐶 = 𝐴𝑒−𝑟𝑚 (present value)
where 𝑟 is the interest rate per annum, 𝐶 is the initial capital.
present value 5 100 100
Continuously Compounded Return
def natural logarithm of the simple gross return
A.k.a. log return
In one-period:
𝑟𝑡 = ln(1 +𝑅𝑡) = ln𝑃𝑡𝑃𝑡−1
Extend to Multiperiod:
𝑟𝑡[𝑘] = ln(1 +𝑅𝑡[𝑘])
= ln
[𝑘−1∏𝑖=0
(1 +𝑅𝑡−𝑖)
]
=
𝑘−1∑𝑖=0
ln(1 +𝑅𝑡−𝑖)
=
𝑘−1∑𝑖=0
𝑟𝑡−𝑖
multiperiod one-period sum
Portfolio Return
simple portfolio return simple return weighting
continuously compounded protfolio return 𝑟𝑝,𝑡 ≈∑𝑤𝑖𝑟𝑖𝑡, assumption: “simple returns Rit are all small
in magnitude” (?)
Excess Return
risk free asset return
long asset + short risk free asset total return
178 Chapter 10. Reading

CHAPTER 11
Misc
11.1 Fonts
11.1.1 Installation
1. Copy to ~/.local/share/fonts (~/.fonts is deprecated)
2. fc-cache -fv
11.1.2 CNS11643
http://data.gov.tw/node/5961
• License: http://data.gov.tw/license
179

Notes, Release
180 Chapter 11. Misc

CHAPTER 12
Indices and tables
• genindex
• search
181