
Notas de Geometria Diferencial Cl assica (Curvas e …...Notas de Geometria Diferencial Cl assica...
59
Notas de Geometria Diferencial Cl´ assica (Curvas e Superf´ ıcies em R 3 ) Alexei A. Deriglazov 1, * 1 Depto. de Matem´atica, ICE, Universidade Federal de Juiz de Fora, MG, Brazil (Dated: November 29, 2017) Lectures 2017 Contents I.Introdu¸c˜ ao. Geometria anal´ ıtica no plano Euclideano em coordenadas curvilineares. 2 II. Curva regular em R 3 . 6 A. Curva regular. 6 B. Reta tangente a curva e vetor tangente a curva parametrizada. 8 C. Comprimento de arco, parametriza¸c˜ ao natural e plano osculador. 9 D. Curvatura k 1 de curva. 10 E. Tor¸ c˜ ao k 2 de curva. 11 F. Equa¸ c˜ oes naturais de curva (Formulas de Frenet). 12 III. Superf´ ıcie em R 3 . 15 A.Defini¸c˜ ao de superf´ ıcie regular, m´ etrica. 15 B. Superf´ ıcie parametrizada, superf´ ıcie gr´ afico e superf´ ıcie impl´ ıcita. 18 C. Plano tangente a superf´ ıcie. 19 D. Curva sobre superf´ ıcie. Coordenadas de vetor tangente e espa¸co tangente a superf´ ıcie. 20 E. Produto escalar, comprimento de arco e ´ area em coordenadas locais. 21 F. Discuss˜ ao. 22 G. Isometrias e superf´ ıcies isom´ etricas. 23 H. Coordenadas conformes sobre superf´ ıcie. 24 I.Aplica¸c˜ ao conforme. 26 IV. Calculo diferencial sobre superf´ ıcie. 28 A. Derivada covariante, campo vetorial paralelo e transporte paralelo. 28 B. Derivada covariante em coordenadas locais, s´ ımbolos de Christoffel, segunda forma fundamental de superf´ ıcie. 29 C. Curva geod´ esica. 33 D. Distancia entre pontos de superf´ ıcie. Elementos de analise variacional. 35 E. Tensor de curvatura e curvatura de Gauss de superf´ ıcie. 38 F. Curvatura normal de superf´ ıcie e curvatura geod´ esica de curva. 42 G.Visualiza¸c˜ ao de curvaturas normais: parabol´ oide osculador, curvaturas principais, indicatriz de curvatura, eclassifica¸c˜ ao dos pontos de superf´ ıcie. 45 H. Discuss˜ ao. 49 I. Coordenadas semigeod´ esicas sobre superf´ ıcie. 50 J. Teorema de Gauss-Bonnet (este paragrafo est´ a em fase de constru¸c˜ ao). 52 Index 56 * Electronic address: [email protected]
Transcript of Notas de Geometria Diferencial Cl assica (Curvas e …...Notas de Geometria Diferencial Cl assica...
Notas de Geometria Diferencial Classica (Curvas e Superfıcies em R3)
Alexei A. Deriglazov1, ∗
1Depto. de Matematica, ICE, Universidade Federal de Juiz de Fora, MG, Brazil(Dated: November 29, 2017)
Lectures 2017
Contents
I. Introducao. Geometria analıtica no plano Euclideano em coordenadas curvilineares. 2
II. Curva regular em R3. 6A. Curva regular. 6B. Reta tangente a curva e vetor tangente a curva parametrizada. 8C. Comprimento de arco, parametrizacao natural e plano osculador. 9D. Curvatura k1 de curva. 10E. Torcao k2 de curva. 11F. Equacoes naturais de curva (Formulas de Frenet). 12
III. Superfıcie em R3. 15A. Definicao de superfıcie regular, metrica. 15B. Superfıcie parametrizada, superfıcie grafico e superfıcie implıcita. 18C. Plano tangente a superfıcie. 19D. Curva sobre superfıcie. Coordenadas de vetor tangente e espaco tangente a superfıcie. 20E. Produto escalar, comprimento de arco e area em coordenadas locais. 21F. Discussao. 22G. Isometrias e superfıcies isometricas. 23H. Coordenadas conformes sobre superfıcie. 24I. Aplicacao conforme. 26
IV. Calculo diferencial sobre superfıcie. 28A. Derivada covariante, campo vetorial paralelo e transporte paralelo. 28B. Derivada covariante em coordenadas locais, sımbolos de Christoffel, segunda forma fundamental de
superfıcie. 29C. Curva geodesica. 33D. Distancia entre pontos de superfıcie. Elementos de analise variacional. 35E. Tensor de curvatura e curvatura de Gauss de superfıcie. 38F. Curvatura normal de superfıcie e curvatura geodesica de curva. 42G. Visualizacao de curvaturas normais: paraboloide osculador, curvaturas principais, indicatriz de curvatura,
e classificacao dos pontos de superfıcie. 45H. Discussao. 49I. Coordenadas semigeodesicas sobre superfıcie. 50J. Teorema de Gauss-Bonnet (este paragrafo esta em fase de construcao). 52
Index 56
∗Electronic address: [email protected]

I Coordenadas curvilineares 2
I. INTRODUCAO. GEOMETRIA ANALITICA NO PLANO EUCLIDEANO EM COORDENADASCURVILINEARES.
Varios conceitos importantes de geometria diferencial de superfıcies podem ser ilustrados e visualizados no estudoda geometria analıtica em coordenadas curvilineares.
Considere plano E equipado com coordenadas cartesianas x1, x2, ou simplismente xi, i = 1, 2. Entao temos
identificacoes: M ∼ (x1, x2) ∼ r =
(x1
x2
), onde r e vetor de posicao do ponto M . Vamos precisar de mais
um exemplar do plano, digamos C = ξ =
(ξ1
ξ2
). Cada bijecao entre os planos E e C permite usar ξa como
coordenadas dos pontos de E. Nos vamos usar terminologia seguinte. Dada bijecao nao linear1
ϕ : ξ → r = ϕ(ξ), ou xi = ϕi(ξa), (1)
os numeros ξa sao chamados coordenadas curvilineares de ponto r ∈ E. ϕi(ξa) sao funcoes de passagem de coordenadas
curvilineares para cartesianas, enquanto a matriz composta de derivadas ∂ϕi
∂ξa e chamada matriz de Jacobi
J =
(∂ϕ1
∂ξ1∂ϕ1
∂ξ2
∂ϕ2
∂ξ1∂ϕ2
∂ξ2
)=(
∂ϕ∂ξ1
∂ϕ∂ξ2
). (2)
Como ϕ e aplicacao bijetiva, ela tem inversa, ϕ : r→ ξ = ϕ(r), ou ξa = ϕa(xi). Por construcao: ϕi(ϕa(xj)) = xi.Exemplos:
x = r cos θy = r sin θ
, r > 0, −π < θ < π, (3)
x′ = x cosα+ y sinαy′ = −x sinα+ y cosα
, α = const, (aqui esta dada ϕ no lugar de ϕ) (4)
x′ = x cos(π(x2 + y2)) + y sin(π(x2 + y2))y′ = −x sin(π(x2 + y2)) + y cos(π(x2 + y2))
. (5)
As vezes, coordenadas ξa admitem interpretacao geometrica no plano E. Em particular, r e θ do exemplo (3), saocoordenadas polares2 de E. No caso de aplicacao linear (4), os numeros x′ e y′ representam coordenadas cartesianasobtidas por meio de rotacao dos eixos iniciais x e y pelo angulo α no sentido antihorario.Exercıcio i1. Encontre inversas das aplicacoes (3) e (4).
Exercıcio i2. Mostre que matrizes de Jacobi das aplicacoes ϕ e ϕ sao inversas: ∂ϕi
∂ξa
∣∣∣ξ(x)
∂ϕa
∂xj = δij .
Exercıcio i3. Encontre interpretacao geometrica das coordenadas r e θ dadas por: x = a + r cos(θ − β), y =b+ r sin(θ − β), onde a, b e β sao numeros dados.
Vamos resolver algumas problemas de geometria analıtica usando coordenadas curvilineares ξa no lugar de coorde-nadas cartesianas xi.Distancia. Em coordenadas cartesianas, o quadrado da distancia entre os pontos r e r + 4r podemos calcularusando, por exemplo, produto escalar: d2 = (4r,4r) = 4xi4xi. Para dois pontos proximos M e N , vamos tentarescrever esta formula em termos de ξa e ξa + 4ξa. Usando series de Taylor, calcule: 4x1 = x1(N) − x1(M) =
ϕ1(ξ1 + 4ξ1, ξ2 + 4ξ2) − ϕ1(ξ1, ξ2) = ϕ1(ξ1, ξ2) + ∂ϕ1
∂ξ14ξ1 + ∂ϕ1
∂ξ24ξ2 + . . . − ϕ1(ξ1, ξ2) ≈ ∂ϕ1
∂ξa4ξa. Semelhante,
4x2 ≈ ∂ϕ2
∂ξa4ξa. Substituindo estes 4xi na expressao para quadrado de distancia, obtemos formula aproximada
d2 ≈ gab4ξa4ξb, onde gab(ξa) ≡ ∂ϕi
∂ξa∂ϕi
∂ξb(6)
1 De acordo com algebra linear, aplicacoes lineares, x = Rξ + a, especificadas por uma matriz ortogonal R e um vetor a, correspondemao deslocamento e rotacao de coordenadas originais, ou seja, as coordenadas novas permanecem cartesianas.
2 Mais precisamente, sao coordenadas polares com semieixo polar coincidente com semieixo Ox.

I Coordenadas curvilineares 3
Matriz simetrica com elementos gab e chamada metrica do plano E em coordenadas ξa. Entao, precisa saber a metricapara encontrar distancia em coordenadas curvilineares. Como vamos ver abaixo, ela faz papel fundamental em todasas construcoes geometricas em coordenadas curvilineares. A inversa dela vamos anotar gab, entao gacg
cb = δab.
Exercıcio i4. Mostre que a matriz inversa e gab(ξa) = ∂ϕa
∂xi∂ϕb
∂xi
∣∣∣x(ξ)
.
Exercıcio i5. Encontre gab e gab no caso de coordenadas polares.Comentario. Fazendo calculos na aproximacao linear, e costume escrever sımbolo de diferencial no lugar de acrescimo.
O jeito formal para calculo anterior e como segue: d2 = dxidxi = dϕidϕi = ∂ϕi
∂ξa∂ϕi
∂ξbdξadξb ≡ gabdξadξb.
Curva e reta.
Def. Seja ξ(t) equacao parametrica de uma curva em C, entao r(t)def== ϕ(ξ(t)) curva em E. A curva ξ(t) e chamada
representante de r(t) em coordenadas ξa.Exercıcio i6. (a) Encontre curva com representante r = 2, θ = t. (b) Encontre curva com representante r = t, θ = π
6 .(c) Reta passa pelo ponto r0 = (1, 2) e tem vetor-diretor V = (3, 4). Encontre representante de reta em coordenadaspolares. (d) Encontre representante de hiperbole x2 − y2 = 1 em coordenadas x′, y′ de (4) com α = −π4 .
Reta no plano E podemos definir como uma solucao de equacao diferencial d2rdt2 = 0. Vamos resolver o problema
seguinte: dado representante ξ(t) de uma curva, como podemos decidir, se a curva com este representante e uma reta?
Calculando segunda derivada dos ambos lados de r(t) = ϕ(ξ(t)), obtemos, no caso de reta: 0 = ddt
(∂ϕi
∂ξadξa
dt
)=
∂ϕi
∂ξcd2ξc
dt2 + ∂2ϕi
∂ξb∂ξadξb
dtdξa
dt = ∂ϕi
∂ξc
[d2ξc
dt2 + ∂ϕc
∂xj
∣∣∣x(ξ)
∂2ϕj
∂ξb∂ξadξb
dtdξa
dt
]. Como ∂ϕi
∂ξc representa uma matriz invertivel, esta
equacao implica
d2ξc
dt2+ Γcba
dξb
dt
dξa
dt= 0, (7)
onde denotamos
Γcba =∂ϕc
∂xj
∣∣∣∣x(ξ)
∂2ϕj
∂ξb∂ξa, (8)
os chamados coeficientes de conexao em coordenadas ξa. Entao, quando ξa(t) obedecem a equacao (7), curva r(t) euma reta em E.Exercıcio i7. Mostre que Γcba = 1
2 gce(∂bgea + ∂agbe − ∂egba).
Exercıcio i8. Encontre os coeficientes Γcba no caso de coordenadas polares.Exercıcio i9. Escreva a equacao (7) no caso de coordenadas polares.Vetor. Considere conjunto dos vetores v(ξ0) com ponto inicial ξ0, e conjunto V(r0), onde r0 = ϕ(ξ0). Comodescrito abaixo, bijecao ϕ gera uma bijecao entre estes conjuntos. Portanto, os numeros v1 e v2 podemos usar comocoordenadas de vetor V.
Dado vetor v(ξ0) no ponto ξ0 ∈ C, podemos encontrar uma curva ao qual ele e tangente. Por exemplo, pegue3
ξ(t) = ξ0 +vt. Construa imagem de curva em E: r(t) = ϕ(ξ(t)), e encontre vetor tangente dela no ponto r0 = ϕ(ξ0):V = dr
dt
∣∣t=0
. Entao v e representante de V, e os numeros va sao chamados coordenadas de V em sistema ξa. Aformula mais detalhada e
V =∂ϕ
∂ξa
∣∣∣∣ξ0
dξa
dt
∣∣∣∣t=0
= r′ava, onde r′a =
∂ϕ
∂ξa. (9)
Desta formula, imediatamente temos expressao para o produto escalar em coordenadas curvilineares (compare com(6))
(V,W) = gabvawb. (10)
Exercıcio i10. Encontre coordenadas polares do vetor V(1, 2) =
(03
).
3 Curva com tal propriedade nao e unica. Por exemplo, a curva ξ(t) = ξ0 + vt + Wt2, onde W e um dado vetor, tambem tem v como
tangente: dξdt
∣∣∣ξ0
= v. Observe uma consequancia da Eq. (9): o vetor V nao depende de curva que foi escolhida para construir dele!
I Coordenadas curvilineares 4
r
r
r
r '
1
2=
= r ' 0
0
( 0, 0)
( )
( )
d
r
rd
dd
1
2
x
x
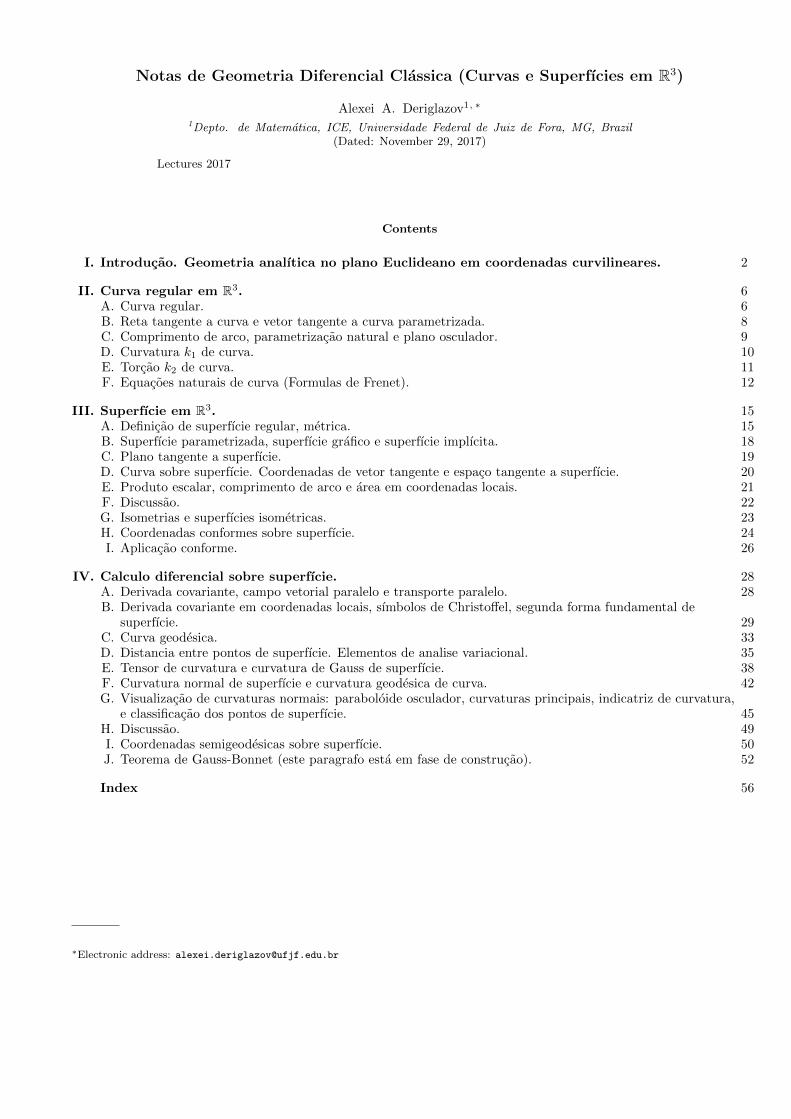
FIG. 1: Vetores tangentes as curvas coordenadas formam uma base de E.
Formula (9) afirma que V e combinacao linear de vetores r′1 e r′2, ou seja va sao coordenadas de V em uma baser′a de E. Vamos encontrar interpretacao geometrica desta base.Curvas coordenadas e vetores tangentes delas. Como caso particular da construcao acima, considere no ponto
ξ0 de C os vetores ω1 =
(10
)e ω2 =
(01
)de base ortonormal neste ponto. Eles sao tangentes as retas coordenadas
com equacoes parametricas (ξ1, ξ20) e(ξ1
0 , ξ2), onde ξ1 e parametro da reta horizontal e ξ2 e parametro da reta vertical.
Imagens destas retas sao curvas coordenadas em E: r(ξ1) = ϕ(ξ1, ξ20) e r(ξ2) = ϕ(ξ1
0 , ξ2). Vetores tangentes deles
no ponto r0 = ϕ(ξ10 , ξ
20) sao: dr(ξ1)
dξ1
∣∣∣ξ10
e dr(ξ2)dξ2
∣∣∣ξ20
, veja Fig. 1. Levando em conta (1), concluimos que ωa sao
representantes dos seguintes vetores de E
∂ϕ
∂ξa
∣∣∣∣ξ0
. (11)
Comparando com (9), concluimos que r′a sao imagens dos vetores4 basicos ωa. Portanto, coordenadas de V ∈ E nosistema ξa sao coeficientes de decomposicao de V em base de vetores r′a, tangentes as curvas coordenadas.Exercıcio i11. Encontre curvas coordenadas e vetores r′a no caso de coordenadas polares. Faca desenho de curvas evetores num ponto de E com coordenadas r0, θ0. Calcule comprimentos dos vetores r′1 e r′2.
As curvas coordenadas e vetores tangentes delas nos tragam uma certa visualizacao de coordenadas curvilineares:estamos trabalhando com plano E, equipado em cada ponto com sua propria base (que estamos usando para estudarvetores neste ponto). Em base desta visualizacao, podemos fazer varias observacoes:Comentarios. 1. Poderiamos escrever um vetor v(ξ0) ∈ C como diferenca dos pontos inicial e final dele, v = ξf − ξ0,e, usando aplicacao ϕ, construir W = ϕ(ξf )−ϕ(ξ0) ∈ E. Observe, que V de (9) e W sao vetores diferentes!2. Pegue dois vetores iguais nos pontos diferentes de E: V(r1) = V(r2). De acordo com geometria analıtica,coordenadas cartesianas deles coincidem: V i(r1) = V i(r2). Mas as coordenadas curvilineares deles geralmente saodiferentes. Exatamente este fato representa a equacao (16) encontrada abaixo.Interpretacao geometrica de J , gab e Γabc. Comparando (2) e (9), concluimos que colunas de matriz de Jacobisao vetores basicos r′a: J = (r′1 r′2). Metrica (6) e composta de produtos escalares dos vetores basicos
gab = (r′a, r′b). (12)
Essa equacao mostra, em particular, que a base r′a geralmente nao e ortonormal, e e a metrica, que contem todainformacao sobre os vetores basicos (sobre comprimento deles a angulo entre eles em cada ponto). Observe tambem:
se (1) e aplicacao identica num ponto (ou seja ∂ϕi
∂ξa
∣∣∣ξ0
= δia), ela vai transferir base ortonormal ωa em base r′a tambem
ortonormal, ou seja, metrica neste ponto permanece Euclideana: gab = δab.Equacao (9) permite encontrar V i para dados va. Usando produto escalar de E e (12), obtemos formula inversa
va = gab(r′b,V). (13)
4 Observe, que r′1 ∈ E tem coordenadas
(10
)e r′2 tem coordenadas
(01
).

I Coordenadas curvilineares 5
Considere uma curva r(t) com representante ξa(t), e construa um campo V de vetores constantes ao longo dessacurva. Se v(t) sao representantes de V, temos V = r′a(t)va(t). Vamos calcular derivada de ambas as partes emrelacao de t
0 = r′adva
dt+ vb
∂r′b∂ξc
dξc
dt. (14)
Os quatro vetores∂r′b∂ξc escrevemos em base r′a (denotando coeficientes de expancao Γ1
bc e Γ2bc )
∂r′b∂ξc
= Γabcr′a. (15)
Exercıcio i12. Confirme que as equacoes (8) e (15) determinam as mesmas Γ.Essa formula revela o significado dos coeficientes de conexao. Por exemplo, Γ1
21 e primeira componente (em baser′a) de vetor Γ21, o ultimo representa taxa de variacao de vetor r′2 na direcao de curva coordenada r(ξ1). A conexaonao nula implica, que vetores basicos r′b sofrem acrescimos na passagem de um ponto de E para um outro.
Usando (15) na formula anterior, obtemos condicao para um campo V ∈ E ser constante em termos de coordenadascurvilinheares dele va
dva
dt+ Γabc
dξb
dtvc = 0. (16)
Portanto coordenadas de campo constante nao sao constantes, veja tambem o comentario 2 acima. Como vamos verno Capitulo 4, para uma superfıcie essa equacao determina a regra de transporte paralelo sobre dela.
Exercıcio i13. O campo V tem coordenadas polares
(01
)ao longo da curva θ = π
3 . Usando (16), verifique, se V e
um campo constante.Exercıcio i14. Usando (13), mostre mais uma formula para encontrar coordenadas curvilineares de um vetor: va =∂ϕa
∂xi Vi∣∣∣x(ξ)
.
Exercıcio i15. Mostre, que (15) implica identidade
∂cgab − Γkcagkb − Γkcbgak = 0. (17)
Exercıcio i16. Seja va(t) e ωa(t) obedecem a Eq. (16), ou seja, representam campos constantes V e W ao longo deuma curva ξa(t). Mostre por meio de calculo direto, que d
dt (gabvaωb) = 0. Observe interpretacao geometrica simples
deste resultado: angulo entre vetores dos campos constantes e mesmo em todos pontos de curva.
I Coordenadas curvilineares 6
(a) (b) (c)
Br
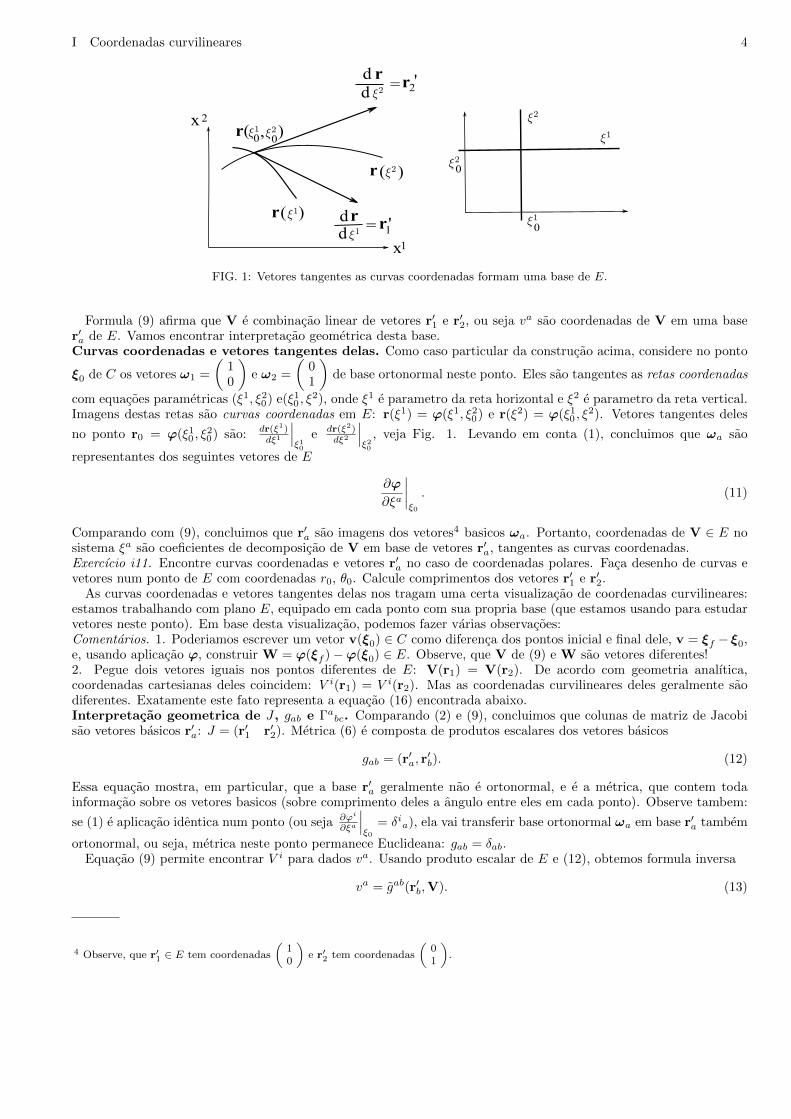
FIG. 2: (a) Aberto de curva (b) Curva com intersecao (c) Curvas com pontos singulares
II. CURVA REGULAR EM R3.
A. Curva regular.
Conjuntos basicos para esta parte sao espaco Euclideano R3 (com produto escalar canonico) e intervalo I de R
R3 =
r =
x1
x2
x3
=
xyz
= xi
,
t ∈ I =]α, β[⊂ R, (ou ]α, β], ou [α, β[, ou [α, β]). (18)
Topologia induzida em dado subconjunto γ ⊂ R3. Seja B uma bola aberta de R3 que contem o ponto r ∈ γ. Vizinhanca
(aberto) de γ e O(r)def== B ∩ γ, veja Fig. 2(a).
Def. 1. Dado subconjunto γ de R3 e curva regular, se
(A) Para cado ponto r de γ existe vizinhanca O(r), intervalo aberto I e aplicacao x : Isobre−→ O(r); t → r = x(t)
(ou simplismente r(t));(B) Funcoes xi(t) sao diferenciaveis (tem derivadas contınuas de todas as ordens, as vezes analıticas);
(C) r′def== dr(t)
dt 6= 0 no ponto r.Comentarios.1. (A) e (B) proibem intersecoes, veja Figura 2(b), e curvas de Peano. (B) e (C) proibem pontos singulares - os pontosonde r′(t) e discontınua, veja Fig. 2(c).2. Af. 1.1. Em uma vizinhanca de r, aplicacao diferenciavel x e bijecao com x−1 diferenciavel (entao x e difeomor-fismo). Em particular, x e bijecao bicontınua (homeomorfismo).Dem. Vamos anotar aplicacao x como xi = f i(t). (C) implica que para uma destas funcoes, digamos f1(t), temosdf1(t)dt 6= 0 no ponto r, e como ela e contınua, df1(t)
dt 6= 0 numa vizinhanca de r. De acordo com teorema sobre funcao
inversa, f1(t) e invertivel. Vamos anotar a funcao inversa diferenciavel como t = f(x1). x e injetiva. Realmente,como f1 e invertivel, t1 6= t2 implica x1
1 6= x12, portanto r1 6= r2. Entao x e injetiva, e pois ela e aplicacao sobre, x
representa uma bijecao. Aplicacao inversa e funcao diferenciavel seguinte: x−1 : (x1, x2, x3) ∈ γ → t = f(x1).Aplicacao x(t) e chamada parametrizacao (ou equacao parametrica) de γ, enquanto aplicacao inversa x−1 : r→ t e
sistema de coordinadas locais (mapa) sobre γ. O numero t e coordenada de r ∈ γ.Exemplo 1.1. Conjunto γ = r0 + at; t ∈ R e chamado reta que passa pelo pelo r0 na direcao de vetor a. Comoaplicacao x da Def. 1, podemos pegar x : t→ r = r0 + at. Confirme, que γ e curva regular.Exemplo 1.2. Conjunto γ = (x, y, 0); x2 + y2 = a2 e chamado circunferencia de raio a (no plano z = 0). De acordocom topologia, nao existe difeomorfismo entre um aberto de R e uma circunferencia.Exemplo 1.3. Considere conjunto γ = x = cos t, y = sin t, z = 0; t ∈]0, 2π[. Como x2 + y2 = 1, nosso conjunto ecircunferencia no plano z = 0, a menos o ponto (1, 0, 0). Observe que coordenada t tem visualizacao como angulo nadirecao de ponto de circunferencia. Como aplicacao x da Def. 1, podemos pegar x : t→ (cost, sin t, 0). Confirme queγ e curva regular.Exercıcio 1.1. Confirme, que circunferencia e curva regular. (Dica: como aplicacoes do Item (A) na Def. 1, pegue xdo exemplo anterior, e y : t→ (cos(t+ π), sin(t+ π), 0), onde t ∈]0, 2π[.)

II Curva regular 7
xx
x
12
3
1
x
y
t
t'
= y x-1
x3
x1
x2
y
t
r
t =f (x )-1
= x = f (t)1
(a) (b)1
FIG. 3: (a) Duas parametrizacoes sao ligadas por um difeomorfismo (b) Reta coordenada x1 pode ser escolhida para parametrizara curva
3. Para dada curva γ, aplicacao x nao e unica. Realmente, seja t = ϕ(t′) funcao diferenciavel com ϕ′(t′) 6= 0, construa
aplicacao ydef== x ϕ (ou y(t′) = x(ϕ(t′)). Ela tem O(r) como imagem, portanto descreva a mesma curva γ. Usando
a terminologia adotada acima, sobre O(r) existe numero infinito de sistemas de coordenadas.
Exemplo 1.4. Seja o ponto r tem coordenada t0 6= 0 em sistema t. Entao em sistema t′def== t − t0 este ponto tem
coordenada t′ = 0. Portanto, na definicao de curva regular poderıamos assumir, que o intervalo I e intervao do ponto0 ∈ Rt, e r = x(0).4. Af. 1.2. Duas parametrizacoes de γ, x : t→ γ e y : t′ → γ sao ligadas por meio de um difeomorfismo ϕ : t′ = ϕ(t).
Dem. Construa ϕdef== y−1 x e inversa dela ϕ
def== x−1 y, veja Fig. 3(a). As aplicacoes sao diferenciaveis por
construcao.Exemplo 1.5. Localmente, γ pode ser parametrizada por uma das seguintes aplicacoes:
y :
x1 = τx2 = f2(τ)x3 = f3(τ)
ou
x1 = f1(τ)x2 = τx3 = f3(τ)
ou
x1 = f1(τ)x2 = f2(τ)x3 = τ
(19)
Dem. Seja x com xi = f i(t) - uma paramatrizacao de γ. De acordo com teorema sobre funcao inversa, (C) implica
que uma destas funcoes, por exemplo, f1(t), e invertivel. Considere a equacao τ = f1(t) e resolva dela: t = f(τ).
Como f e diferenciavel, de acordo com Af. 1. 2 podemos pegar τ no lugar de T como um sistema de coordenadassobre γ. Substituindo t = f(τ) em xi = f i(t) obtemos parametrizacao desejada
y :
x1 = τ
x2 = f2(f(τ))
x3 = f3(f(τ))
, inversa: y−1 : (x1, x2, x3) ∈ γ → τ = x1. (20)
Observe que papel de sistema de coordenadas faca reta Rx1 de R3, e aplicacao y−1 e projecao de γ sobre a reta,veja Fig. 3(b). Observe, que no caso de curva plana, a parametrizacao (20) e simplismente y = f(x).
Por construcao y = x f , portanto aplicacao y e diferenciavel, entao representa uma parametrizacao de γ.Por definicao, a curva e um subconjunto de R3 que (localmente) admite uma parametrizacao. Para enfatizar a
diferenca entre curva e parametrizacao dela, e conveniente definir a nocao de curva parametrizada.Def. Aplicacao x : I → R3 que obedece das condicoes (B) e (C) e chamada curva parametrizada.
Usando esta terminologia, podemos reformular varias frases acima como se segue: 1) Imagem de curva parametrizadae uma curva regular. Observe, que isto nos da um jeito para construir exemplos das cuvas regulares. Sobre outrosjeitos para construir uma curva, veja equacoes (23) e (24) abaixo. 2) Existem muitas curvas parametrizadas quedeterminam a mesma curva regular.
Reformulando Exemplos 1.1 e 1.2 acima, obtemos exemplos das curvas parametrizadas.Exemplo 1.6. Curva parametrizada x : t→ r = r0 + at e reta que passa pelo pelo r0 na direcao de vetor a.Exemplo 1.7. Curva parametrizada x : t→ (cos t, sin t, 0), onde t ∈]0, 2π[, e circunferencia a menos o ponto (1, 0, 0).

II Curva regular 8
d( , )
r
r
0
d( , reta)r r0
r
n(t )0
(t + t)
0
FIG. 4: Reta tangente a curva.
B. Reta tangente a curva e vetor tangente a curva parametrizada.
Def. Seja r0 ∈ γ. Reta r0 + nt e tangente de γ, se
limr→r0
d(r, reta)
d(r, r0)= 0, (21)
onde d(r, reta) e distancia do ponto r de curva ate a reta, veja Fig. 4. Observe que por construcao, a reta tangentenao depende da escolha de parametrizacao de curva (uma parametrizacao nao foi mencionada na definicao).
Observe que d(r,reta)d(r,r0) = sin θ, ou seja, direcao de tangente coincide com limite de direcao das secantes. Intuitivamente,
tangente e a reta mais proxima da curva na vizinhanca do ponto r0.Def. Dada curva parametrizada r(t), o vetor r′ = dr
dt e chamado vetor tangente.Observe, que que existem muitas curvas parametrizadas que tem dado vetor V como vetor tangente. Por exemplo,
V e tangente das curvas r0 + Vt, r0 + V(t + 1) e r0 + Vt + Wt2 no ponto t = 0. As primeiras duas curvasparametrizadas tem mesmo traco, enquanto a terceira curva poarametrizada tem traco diferente.
Seja x : t → γ e y : t′ → γ - duas parametrizacoes de curva γ. Vetores tangentes delas no cado ponto saoparalelos. Realmente, da relacao y(t′) = x(ϕ(t′)), imediatamente obtemos proporcionalidade dos vetores tangentes:y′(t′) = ϕ′(t′) x′(t)|ϕ(t′). Entao direcao de vetor tangente nao depende da parametrizacao escolhida para a curva.
Afirmacao a seguir esclarece a ligacao entre vetores tangentes e a reta tangente no dado ponto.Af. 2.1. No cado ponto de curva regular, reta tangente e unica e passa na direcao de vetor tangente.Dem. Seja r(t) uma parametrizacao de γ. Considere reta r0 + nt, com vetor-diretor unitario n, que passa pelo umponto r(t0) = r0. Vamos ver, quando ela obedece a condicao (22). Temos d(r, r0) = |r(t0 +4t) − r(t0)| ≡ |4r|, ed(r, reta) = |4r| sin θ = |4r||n| sin θ = |[4r,n]|. Para o limite se anular:
limr→r0
d(r, reta)
d(r, r0)= lim4t→0
|[4r,n]||4r|
=
lim4t→0
|[4r,n]|/4t|4r|/4t
=|[r′,n]|
r′, (22)
deve ser [r′,n] = 0, ou seja, para ser reta tangente, vetor diretor dela deve ser paralelo ao vetor tangente. Junto comafirmacao anterior, isto implica que a reta tengente e unica.Exemplo 2.1. Veja a lista de equacoes da reta tangente no ponto r(t0) = r0 de uma curva dada no plano
x = x(t)y = y(t)
, → r = r(t0) + r′(t0)t;
y = y(x), → y = y(x0) + y′(x0)t;
Φ(x, y) = 0, →x = x0 + Φ′x(x0, y0)ty = y0 + Φ′y(x0, y0)t
; (23)
e no espaco
r = r(t), → r = r(t0) + r′(t0)t;y = y(x),z = z(x),
→y = y(x0) + y′(x0)tz = z(x0) + z′(x0)t
;Φ(x, y, z) = 0Ψ(x, y, z) = 0
, → r = r0 + [∇Φ,∇Ψ]0t. (24)

II Reta tangente a curva e vetor tangente a curva parametrizada 9
Resumindo este paragrafo, curva regular tem unica reta tangente no cado ponto. Se r(t) uma parametrizacao deγ, entao a reta tangente tem vetor diretor r′(t). Todos vetores tangentes no ponto dado de curva ficam sobre retatangente (portanto eles formam espaco vetorial unidimensional).
C. Comprimento de arco, parametrizacao natural e plano osculador.
Def. Comprimento de arco de curva γ entre r(a) e r(b), a < b, e numero
l =
∫ b
a
|drdt|dt =
∫ b
a
√(dx1
dt
)2
+
(dx2
dt
)2
+
(dx3
dt
)2
dt. (25)
Embora que l foi definido usando uma parametrizacao particular de γ, o comprimento nao depende de parametrizacaoescolhida e, portanto, e uma characteristica de curva. Para confirmar isto, faca troca de variaveis t = ϕ(t′) (va-
mos assumir ϕ′ > 0) na integral definnida. Calculando derivada de r(ϕ(t′)) obtemos dr(ϕ(t′))dt′ = dr
dt |ϕ(t′)ϕ′(t′), ou
drdt |ϕ(t′) = 1
ϕ′(t′)dr(ϕ(t′))
dt′ . Portanto a integral fica: l =∫ ∣∣∣dr(ϕ(t′))
dt′1
ϕ′(t′)
∣∣∣ dϕ(t′)dt′ dt′ =
∫ ∣∣∣dr(ϕ(t′))dt′
∣∣∣ dt′. Mas ultima ex-
pressao representa comprimento de arco calculado em parametrizacao y(t′) = x(ϕ(t′)).Exercıcio 3.1. Confirma, que a troca com ϕ′ < 0 implica o mesmo resultado final.
Vamos discutir uma parametrizacao especial de curva que e muito util em varias aplicacoes.Def. Parametrizacao r(s) de γ e chamada parametrizacao natural, se l(s1, s2) = |s2 − s1|.Af. 3.1. r(s) e parametrizacao natural, se e somente se |r′(s)| = 1 para todo s.Af. 3.2. Se r(s) e parametrizacao natural e r′′(s) 6= 0, entao r′′(s) ⊥ r′(s).Primeira afirmacao segue da definicao de comprimento: l =
∫ s2s1|r′(s)|ds = s2 − s1 implica |r′(s)| = 1. Daqui
(r′(s), r′(s)) = 1, e calculando derivada, obtemos 2(r′′(s), r′(s)) = 0, ou seja r′′(s) ⊥ r′(s).Exercıcio 3.2. Parametrizacao de circunferencia por meio de angulo no Exemplo 1.6 e parametrizacao natural.Parametrizacao de reta: r = r0 + ns com vetor-diretor |n| = 1 e parametrizacao natural. Encontre parametriuzacaonatural de circunferencia de raio a.
Vamos confirmar existencia de parametrizacao natural para uma curva regular. Dada parametrizacao r(t) de γ,vamos fixar um t0 e definir a funcao
s(t) =
∫ t
t0
|r′(τ)|dτ, ⇒ s′(t) = |r′(t)|. (26)
Como |r′(t)| > 0, a integral determina uma funcao s(t) (diferenciavel) crescente, portanto invertivel. Anotando
a funcao diferenciavel inversa t(s), vamos definir seguinte parametrizacao de curva γ: y(s)def== r(t(s)). y(s) e
parametrizacao natural. Realmente, |y′(s)| = |r′(t)t′(s)| = |r′(t) 1|r′(t)| | = 1, portanto l =
∫ s2s1|y′(s)|ds =
∫ s2s1ds =
s2 − s1.Observe: escolhendo t0 diferentes na Eq. (26), obtemos parametrizacoes naturais diferentes.
Af. 3.3. Parametrizacoes naturais x(s) e y(s) sao ligadas por meio de troca trvial: s = ±s+ c onde c e um numero.Realmente, de acordo com Af. 1.2, duas parametrizacoes de curva sao ligadas por meio de uma troca de variaveis:y(s) = x(s(s)). Calculando derivada: y′(s) = x′(s)|s(s)s′(s), e levando em conta |y′| = |x′| = 1, temos |s′(s)| = 1, ouseja s = ±s+ c.
As duas afirmacoes nos tragam interpretacao de parametrizacao natural como parametrizacao ”por comprimentode arco”.
Usando parametrizacao natural, no cado ponto de γ podemos construir uma base de R3, chamada base adaptadacom a curva (base de Frenet). Ela e composta de vetores ortonormais: tangente τ , normal principal n e binormal b(veja Figure 5(a)
τ = r′(s), n =r′′(s)
|r′′(s)|, b = [τ ,n]. (27)
Subconjunto de R3 seguinte: P = r : (r− r0,d) = 0 e chamado plano, que passa pelo ponto r0 e e perpendicularde vetor dado d. Acontece que plano gerado5 de vetores r′ e r′′ nao depende de parametrizacao escolhida para curva:
5 Isto quer dizer d = [r′, r′′].

II Comprimento de arco, parametrizacao natural e plano osculador 10
(a) (b)
| ''| ''
= r '(s)
n= rrr
''b = n n
r (t)'r0
d( ,P)r
d( , )r r0 r
[ ],
FIG. 5: (a) Base de Frenet; (b) Plano osculador.
Af. 3.4. Seja x(t) e y(t′) duas parametrizacoes de curva. Entao os vetores x′, x′′, y′ e y′′ sao coplanares.Realmente, nos ja vimos que vetores tangentes sao proporcionais, y′(t′) = ϕ′(t′) x′(t)|ϕ(t′). Calculando derivada,
temos y′′(t′) = ϕ′′(t′) x′(t)|ϕ(t′) + [ϕ′′(t′)]2 x′′(t)|ϕ(t′), ou seja, y′′ e combinacao de x′ e x′′.
O plano dos vetores x′ e x′′ pode ser construıdo geometricamente (ou seja, sem mencionar parametrizacao decurva). Assim como reta tangente e mais proxima da curva na vizinhanca do ponto de tangencia, existe o plano compropriedade similar.Def. (Veja Fig. 5(b)) P pelo ponto r0 e plano osculador, se
limr→r0
d(r, P )
d2(r, r0)= 0, (28)
onde d(r, P ) e distancia do ponto r de curva ate o plano.Af. 3.5. Se r′′ 6= 0, e r′ nao e paralelo com r′′ no ponto r0, plano osculador neste ponto e unico e coincide complano dos vetores r′ e r′′. Se uma das condicoes nao esta satisfeita, cado plano que contem vetor tangente r′ e planoosculador.Dem. Seja r(t) uma parametrizacao de γ. Considere o plano P com vetor normal unitario n, que passa pelo um pontor(t0) = r0. Vamos ver, quando P obedece a condicao (28). Temos d(r, r0) = |r(t0 +4t) − r(t0)| ≡ |4r|, e, usandoseries de Taylor, d(r, P ) = |(4r,n)| = |(r′4t+ 1
2r′′(4t)2 + O3(4t), n)| = |(r′,n)4t+ 12 (r′′,n)(4t)2 + (O3(4t),n)|.
O limite:
limr→r0
d(r, P )
d2(r, r0)= lim4t→0
|(r′,n)4t+ 12 (r′′,n)(4t)2 + (O3(4t),n)|/(4t)2
(4r)2/(4t)2=
lim4t→0
|(r′,n)/4t+ 12 (r′′,n) + (O3(4t),n)/(4t)2|
(4r/4t)2,
existe e e nulo se e somente se (r′,n) = 0 e (r′′,n) = 0, ou seja, P e plano dos vetores r′ e r′′. Junto com Af. 3.4, istoimplica que plano osculador e unico.Exercıcio 3.3. Seja todos normais de uma curva plana passem por mesmo ponto O. Mostre, que a curva e circun-ferencia. Dica: considere a curva em coordenadas de R2 com centro no ponto O.
D. Curvatura k1 de curva.
Dada curva γ, seja 4s e comprimento de arco entre retas tangentes em dois pontos, e 4θ > 0 e angulo entre elas,veja Fig. 6. Curvatura de γ (no ponto escolhido) e numero k1 = lim4s→0
4θ4s , ou seja, velocidade angular de rotacao
de reta tangente. Observe que k1 e numero nao negativo.
Af. 4.1. k1(s) = |r′′(s)| em parametrizacao natural s, e k1(t) = |[r′,r′′]||r′|3 em parametrizacao arbitraria r(t).
Dem. Usando Fig. 6 e propriedade |r′(s)| = 1, calcule: |r′′(s)| = | lim4s→04r′
4s | = lim4s→0|4r′||4s| =
lim4s→02|r′| sin(4θ/2)
|4s| = lim4s→0sin(4θ/2)4θ/2
4θ|4s| = k1.
Seja x(s) parametrizacao natural, y(t) parametrizacao arbitraria, e t(s) e funcao de passagem entre elas. Deacordo com Af. 1.2, temos x(s) = y(t(s)), portanto x′s(s) = y′t|(t(s)t′(s). Calculando comprimento, obtemos |t′(s)| =

II Torcao k2 de curva 11
'(s)
'r
r
r'(s+ s)
s
FIG. 6: Curvatura de curva e velocidade angular de rotacao de reta tangente.
1|y′(t)|
∣∣∣t(s)
, e formula anterior fica x′s(s) = ± y′t
|y′t|
∣∣∣t(s)
. Calculando mais uma derivada desta igualdade obtemos
x′′ss =1
|y′t|
[y′t|y′t|
]′t
. (29)
Escrevendo expressoes deste tipo, vamos omitir substituicao de t(s), lembrando que as partes esquerda e direta devemser calculadas para valores de s e t correspondentes um a outro. Calculando dereivada na parte direita, obtemos(Exercıcio)
x′′ss =y′′tt(y
′t)
2 − y′t(y′t,y′′tt)
|y′t|4. (30)
Calculando quadrado, obtemos o resultado desejado
k21 = (x′′ss(s))
2 =(y′′tt)
2(y′t)2 − (y′t,y
′′tt)
2
|y′t|6
∣∣∣∣t(s)
=([y′t,y
′′tt])
2
|y′t|6. (31)
Foi usada identidade A2B2 − (A,B)2 = ([A,B], [A,B]), e substituicao de t(s) foi omitida pois k1 nao depende deparametrizacao.Comentarios.1. Expressao para normal principal n = r′′(s)
|r′′(s)| podemos agora escrever como
r′′ = k1n, ou τ ′ = k1n. (32)
2. k1 = 0 se e somente se a curva e reta.Realmente, (k1)2 = (r′′, r′′) = 0 implica r′′ = 0. Solucao geral desta equacao e a reta r = r0 + vs.Exercıcio 4.1. Confirme as formulas para k1 de curva plana:
x = x(t)y = y(t)
, → (k1)2 =(x′′y′ − y′′x′)2
|(x′)2 + (y′)2|)3;
y = y(x), → (k1)2 =(y′′)2
(1 + (y′)2)3. (33)
Exercıcio 4.2. Calcule curvatura de circunferencia de raio a (resposta: 1a ).
E. Torcao k2 de curva.
Seja r(s) e parametrizacao natural de curva, τ e tangente, n e normal principal e b = [τ ,n] e binormal. Pordefinicao, torcao de γ e o numero
k2 = (b′,n). (34)
Af. 5.1. Temos propriedades
b′ ⊥ b, b′ ⊥ τ , (entao b gira em torno de τ ), (35)

II Equacoes naturais de curva (Formulas de Frenet) 12
portanto b′ e n sao colineares, b′ = (b′,n)n = k2n, ou |k2| = |b′|, e torcao tem apresentacoes
k2 = − (r′s, [r′′ss, r
′′′sss])
(k1)2, k2 = − (r′t, [r
′′tt, r′′′ttt])
([r′t, r′′tt])
2. (36)
Dem. Calculando derivada de (b,b) = 1 temos 2(b′,b) = 0, ou b′ ⊥ b. Calculando derivada de b = [τ ,n] temosb′ = [τ ′,n] + [τ ,n′] = [τ ,n′], ja que τ ′ e n sao proporcionais por construcao de n. Portanto b′ ⊥ τ . Equacoes (35)implicam colinearidade de b′ e n, portanto b′ = (b′,n)n = k2n. Isto implica |b′| = |k2|.
Calculando torcao a partir da definicao, temos: k2 = (b′,n) = ([τ ,n′],n) = ([r′, ( r′′
k1)′],n) = ([r′, r
′′′
k1− r′′
k21k′1], r
′′
k1) =
− (r′s,[r′′ss,r
′′′sss])
(k1)2 .
Exercıcio 5.1. Confirma a segunda das equacoes (36).Af. 5.2. |k2| representa velocidade angular6 de b.Dem. Vamos anotar 4α angulo entre vetores b nos pontos diferentes de curva. Agora calcularemos b′ na expressao
|k2| = |b′| =∣∣∣∣ lim4s→0
4b
4s
∣∣∣∣ = lim4s→0
|4b||4s|
= lim4s→0
sin(4α/2)
4α/24α|4s|
=dα
dl, (37)
pois |4s| = 4l. Entao, modulo de torcao e taxa de variacao de angulo em relacao de acressimo de comprimento dearco, portanto nao depende de parametrizacao escolhida para a curva γ.Af 5.3. Seja k1 6= 0 (curva com esta propriedade e chamada biregular). Entao k2 = 0 no cado ponto se e somente sea curva e plana. Plano de curva coincide com plano osculador dela.Dem. Se k2 = 0, temos b′ = k2n = 0, ou b =const. Usando isto, podemos escrever 0 = (τ ,b) = (r′,b) = (r,b)′.Calcule integral desta igualdade: 0 =
∫ s2s1
(r,b)′ds = (r(s2),b)−(r(s1),b), ou (4r,b) = 0 para todo 4r. Isto significa
que a curva fica no plano perpendicular de binormal b, ou seja, no plano osculador.Exercıcio 5.2. Demonstre a reciproca.Exercıcio 5.3. Considere curva plana com propriedade seguinte: todas retas na direcao de normais principais de γpassam por um ponto O. Mostre que γ e uma circunferencia. (sugestao: considere γ em coordenadas de R2 cominıcio no ponto O, usando equacoes parametricas seguintes: r(s) = α(s)y(s), onde |y(s)| = 1.)
F. Equacoes naturais de curva (Formulas de Frenet).
Nos paragrafos anteriores, com dada curva foram associadas duas funcoes: curvatura k1 e torcao k2. Aqui vamosmostrar a reciproca: dadas duas funcoes k1 e k2, existe unica curva que tem estas funcoes como curvatura e torcao.Para uma curva em parametruzacao natural r(s) temos (veja Fig. 5.1) n = [b, τ ], entao n′ = [b′, τ ] + [b, τ ′] =k2[n, τ ] + k1[b,n] = −k2b− k1τ , veja Figura 5(a).Juntando isto com equacoes para derivadas dos outros vetores de Frenet (ja encontradas acima), concluirmos, quevetores da base de Frenet de uma curva dada obedecem o sistema (de equacoes diferenciais ordinarias em formanormal)
τ ′ = k1n, n′ = −k1τ − k2b, b′ = k2n. (38)
Esta observacao pode ser invertida no sentido seguinte: dadas duas funcoes, k1(s) e k2(s), este sistema determinauma curva. Para confirmar isto, vamos precisarLema 6.1. Seja τ , n e b solucao de (38), com vetores ortonormais em s = 0. Entao eles permanecem ortonormaispara todo s.Dem. Considere matrizes 3× 3 seguintes
Ω =
0 k1 0−k1 0 −k2
0 k2 0
, F =
τnb
, F ′ =
τ ′
n′
b′
. (39)
Usando delas, podemos escrever sistema de Frenet na forma matricial: F ′ = ΩF . Observe que (FFT )ij = (ei, ej)onde ei = (τ ,n,b). De acordo com dados de problema, temos: (FFT )|s=0 = 1, ou seja FT |s=0 e inversa de F |s=0.
6 Torcao foi definida usando parametrizacao natural, que, de acordo com Af. 3.3, nao e unica. No entanto, a torcao nao depende deescolha de parametrizacao natural (Exercıcio).

II Equacoes naturais de curva (Formulas de Frenet) 13
Matrizes inversas sao comutativas, portanto temos tambem (FTF )|s=0 = 1. Precisamos mostrar (FFT ) = 1 paratodo s.
Calcule: (FTF )′ = (F ′)TF + FTF ′ = FTΩTF + FTΩF = 0 pois ΩT = −Ω. Portanto FTF = const, e comoFTF |s=0 = 1, concluirmos FTF = 1. Isto implica FFT = 1.Af. 6.1. Dadas funcoes k1(s) > 0 e k2(s), existe unica curva r(s) que passa pelo r0 e tem dada base de Frenet(ortonormal) (τ 0, n0, b0) neste ponto.Dem. Sistema (38) tem unica solucao com condicoes iniciais τ (0) = τ 0, n(0) = n0, b(0) = b0. De acordo com Lema,a solucao vai ser composta de vetores ortonormais. Usando τ (s) encontrado, construa a curva r(s) = r0 +
∫ s0τ (s)ds.
Lema implica |τ (s)| = 1, portanto l(s) =∫ s
0|τ |ds = s− 0, ou seja s e parametro natural. Por construcao, k1 e k2 sao
curvatura e torcao de curva construıda (Exercıcio).Exercıcio 6.1. Especifique equacoes de Frenet para curva plana (no plano x, y).Exercıcio 6.2. Descreva todas curvas planas com curvatura constante.Exercıcio 6.3. Descreva todas curvas planas com curvatura 1
s (onde s - parametro natural). Constroe grafico. Dica:
solucao geral de sistema: x′ = 1sy, y′ = − 1
sx e x = a cos(ln s) + b sin(ln s), y = b cos(ln s) − a sin(ln s). Resposta: a
menos deslocamento e rotacao no plano, a curva e unica (espiral logarıtmica): r(α) = ( 1√2eα cosα, 1√
2eα sinα, α ∈ R,
parametrizacao natural e α = ln s, s ∈]0,∞[.Exercıcio 6.4. Demonstre, que uma curva de curvatura constante tem seguinte apresentacao
r(s) =1
k1
∫ k1s
0
y(λ)dλ, (40)
onde y(λ) uma curva em parametrizacao natural, que fica sobre esfera de raio 1.Exercıcio 6.5. Demonstre, que curva biregular de torcao constante tem seguinte apresentacao:
r(t) = r0 + c
∫ t
0
[y(λ),y′(λ)]dλ, (41)
onde c = const, r0 e um vetor constante, e y(λ) e uma curva sobre esfera, ou seja: |y(λ)| = 1.Exercıcio 6.6. Demonstre, que cada curva y(t) sobre esfera determina curva de torcao constante de acordo comformula (41). (Dica: para calculat torcao de r(t), considere y(s) em parametrizacao natural.)
Juntando ultimos dois exercıcios podemos dizer, que formula (41) descreva todas curvas de torcao constante.Forma canonica local de curva. Considere uma curva γ na vizinhanca de ponto r0. Vamos escolher base de Frenetneste ponto como a base de R3, entao r0 = 0. Seja r(s) parametrizacao natural de γ. Considere os primeiros termos de
series de Taylor: r(s) = r(0)+r′(0)s+ 12r′′(0)s2 + 1
3!r′′′(0)s3 +O4(s) = (s− k21
3! s3)τ+(k12 s
2 +k′13! s
3)n−k1k2s3b+O4(s).
Usando, que τ = (1, 0, 0), n = (0, 1, 0) e b = (0, 0, 1) neste sistema de coordenadas, obtemos
x(s) = s− k21
3!s3 + O4(s) ∼ s,
y(s) =k1
2s2 +
k′13!s3 + O4(s) ∼ k1
2s2,
z(s) = −k1k2s3 + O4(s) ∼ −k1k2s
3. (42)
Levando em conta, que k1 > 0, cada curva na vizinhanca de um seu ponto tem seguinte comportamento (em base deFrenet com origem neste ponto): projecao dela no plano (x, y) e parabola y ∼ x2, enquanto projecao no plano (x, z)e parabola cubica z ∼ ±x3.Exercıcio 6.7. Seja α : I → R3 uma curva regular com a curvatura k1(s) 6= 0, e γ = π α e a curva obtida peloprojecao ortogonal π sobre o plano osculador de α num ponto s0. Mostre que a curvatura de γ neste ponto coincidecom curvatura de α.
LISTA DE EXERCICIOS.
Nos exercıcios 1-19 (a menos N 3), estamos trabalhando com curvas planas (no plano x, y).Exercıcio II.1. Verifique, se o conjunto r(t) = (t3, t2) representa uma curva regular. Constroe grafico dela.
Exercıcio II.2. Verifique, se o conjunto r(t) =
x =
(0, se t ∈ [−1, 0]
e−1/t2 , se t ∈ (0, 1]
), y =
(e−1/t2 , se t ∈ [−1, 0)
0, se t ∈ [0, 1]
)rep-
resenta uma curva regular. Constroe grafico de x(t) no plano t, x; grafico de y(t) no plano t, y; e grafico de curvar(t).
Observe entao, que diferencibilidade nao garante a ausencia de fraturas.
II Equacoes naturais de curva (Formulas de Frenet) 14
Exercıcio II.3. Escreva expressao explicita para comprimento de arco de curva dada por equacoes (23.2), (23.3), (24.2)e (24.3).Exercıcio II.4. Encontre comprimento de parabola y = x2, x ∈ [−1, 1].Exercıcio II.5. Descreva todas curvas planas com curvatura constante (Dica: resolva o sistema |r′(s)| = 1, |r′′(s)| = a,excluindo y(s) dele. Resposta: a menos deslocamento no plano, a curva e unica: circunferencia de raio 1/a (ou partedela): r(s) = (x0 + 1/a cos(as), y0 + 1/a sin(as)).)
Um fio foi enrolado em torno de circunferencia x2 +y2 = a2. Mantendo a tencao, vamos desenrolar o fio comecandocom ponto (a, 0). Trajetoria deste ponto e a curva chamada evolvente de circunferencia.Exercıcio II.6. Encontre equacoes parametricas de evolvente (pega angulo ϕ na direcao de ponto de tangencia comoparametro) (Resposta: e(ϕ) = (a cosϕ+ aϕ sen ϕ, a sen ϕ− aϕ cosϕ).)Exercıcio II.7. Para cado ϕ, tangentes de circunferencia e evolvente sao perpendiculares.
Exercıcio II.8. Encontre parametrizacao natural de evolvente. (Resposta: ϕ =√
2sa , . . . .)
Exercıcio II.9. Calcule curvatura de evolvente e observe, que k1(0) =∞ (!).Dada curva γ, construa reta tangente no cado ponto dela. Uma curva perpendicular das tangentes no cado ponto
e chamada evolvente de curva γ. Dada parametrizacao natural r(s) de γ, vamos encontrar evolvente. Por definicao,ela tem forma e(s) = r(s) + τ (s)f(s), onde τ (s) e vetor tangente de r(s), e f(s) uma funcao. Vamos encontrar delaa partir de condicao de perpendicularidade: (e′(s), τ (s)) = 0 implica f(s) = C − s, C = const, entao a equacao deevolvente de r(s) e
e(s) = r(s) + τ (s)(C − s). (43)
Exercıcio II.10. Observe, que evolvente de γ pode ser obtida desenrolando o fio esticado sobre γ. Qual e interpretacaode constante C? Sera que s e parametro natural de evolvente?Exercıcio II.11. A circunferencia x2 +(y−a)2 = a2 rola ao longo do eixo Ox. Trajetoria de um ponto de circunferenciae chamada cicloide. Encontre equacoes parametricas de cicloide criada por ponto (0, 0) de circunferencia (pega angulode rotacao de circunferencia ϕ como o parametro. (Resposta: c(ϕ) = (aϕ− a sen ϕ, a− a cosϕ).)
Em 1657, Christiaan Huygens (fisico Holandes) usou propriedades de cicloide para construir um relogio mecanicode alta precisao (a precisao foi aumentada de 15 minutos por dia para 15 segundos!), e ganhou um premio enorme emdineiro.Exercıcio II.12. Encontre parametrizacao natural de cicloide. (Resposta: ϕ = arccos s
4a , . . ..)
Exercıcio II.13. Calcule curvatura de cicloide. (Resposta: k1 = 14a|sen (ϕ/2)| .)
Exercıcio II.14. Encontre equacao de cicloide deslocada pelo aπ para esquerda e pelo 2a para baixo. (Resposta:(aβ + a sen β, − a+ a cosβ), onde β = ϕ− π.)Exercıcio II.15. Encontre evolvente de cicloide que passa pelo ponto (aπ, 2a), e mostre que ela e cicloide de novo (!).
Seja k1 curvatura e n normal principal de curva r(t) num ponto r. Numero R = 1k1
e chamado raio de curvatura,
enquanto o ponto r + 1k1
n e centro de curvatura de r(t) no ponto r. Conjunto dos pontos r(t) + 1k1(t)n(t) e chamado
evoluta de curva r(t).Exercıcio II.16. Encontre evoluta de circunferencia.Exercıcio II.17. Encontre evoluta de cicloide e confirme, que ela e cicloide de novo (!).
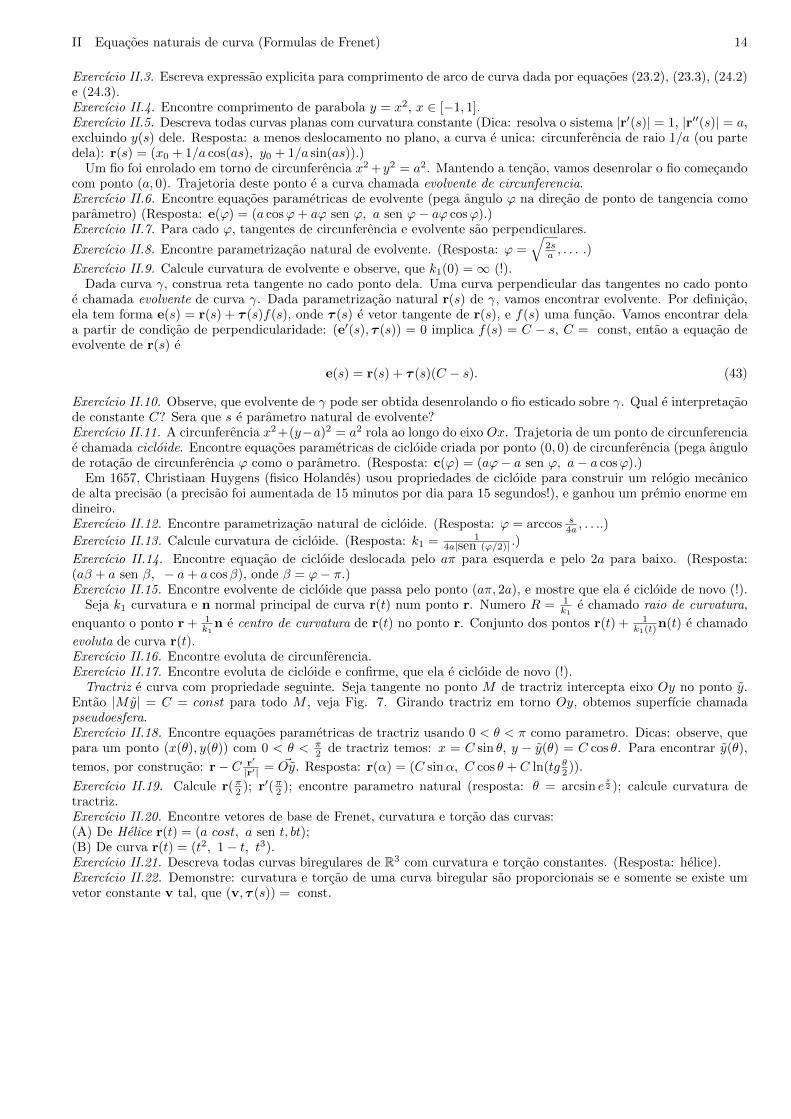
Tractriz e curva com propriedade seguinte. Seja tangente no ponto M de tractriz intercepta eixo Oy no ponto y.Entao |My| = C = const para todo M , veja Fig. 7. Girando tractriz em torno Oy, obtemos superfıcie chamadapseudoesfera.Exercıcio II.18. Encontre equacoes parametricas de tractriz usando 0 < θ < π como parametro. Dicas: observe, quepara um ponto (x(θ), y(θ)) com 0 < θ < π
2 de tractriz temos: x = C sin θ, y − y(θ) = C cos θ. Para encontrar y(θ),
temos, por construcao: r− C r′
|r′| = ~Oy. Resposta: r(α) = (C sinα, C cos θ + C ln(tg θ2 )).
Exercıcio II.19. Calcule r(π2 ); r′(π2 ); encontre parametro natural (resposta: θ = arcsin es2 ); calcule curvatura de
tractriz.Exercıcio II.20. Encontre vetores de base de Frenet, curvatura e torcao das curvas:(A) De Helice r(t) = (a cost, a sen t, bt);(B) De curva r(t) = (t2, 1− t, t3).Exercıcio II.21. Descreva todas curvas biregulares de R3 com curvatura e torcao constantes. (Resposta: helice).Exercıcio II.22. Demonstre: curvatura e torcao de uma curva biregular sao proporcionais se e somente se existe umvetor constante v tal, que (v, τ (s)) = const.

II Equacoes naturais de curva (Formulas de Frenet) 15
x
yr' ( )
y
y~
( )
( )r
C
x
FIG. 7: Tractriz
(a) (b) (c)
B
S
FIG. 8: (a) Aberto de superfıcie; (b) Supefiıcie com intersecoes; (c) Superfıcie com pontos singulares.
III. SUPERFICIE EM R3.
A. Definicao de superfıcie regular, metrica.
Conjuntos basicos para esta parte sao espaco Euclideano R3 (com produto escalar canonico) e plano R2
R3 =
r =
x1
x2
x3
=
xyz
= xi
, R2 =ξa = (ξ1, ξ2) = (u, v)
. (44)
Topologia induzida em subconjunto S ⊂ R3. Seja B uma bola aberta de R3 que contem o ponto r ∈ S. Vizinhanca
(aberto) de S e O(r)def== B ∩ S, veja Fig. 8(a).
Curva e superfıcie sao exemplos de subconjuntos de R3 (mais precisamente, exemplos de variedades de dimencao 1e 2). Portanto, nao e surpresa que este paragrafo e paragrafo II A sao bem parecidos.Def. Dado subconjunto S e superfıcie regular, se
(A) Para cado ponto r de S existe vizinhanca O(r), cırculo aberto U de R2 e aplicacao x : Usobre−→ O(r); (ξ1, ξ2)→
r = x(ξa) (ou simplismente r(ξa));(B) Funcoes xi(ξ1, ξ2) sao diferenciaveis (tem derivadas contınuas de todas as ordens, as vezes analıticas);
(C) Condicao de regularidade: rank(∂xi
∂ξa
)≡ rank
(∂r∂ξ1
∂r∂ξ2
)= rank
∂x1
∂ξ1∂x1
∂ξ2
∂x2
∂ξ1∂x2
∂ξ2
∂x3
∂ξ1∂x3
∂ξ2
= 2, (45)
Comentarios.1. (C) implica: a) colunas de matriz sao linearmente independentes; b) Algumas duas linhas de matriz sao linearmente

III Definicao de superfıcie regular 16
x x1
2
3
1
x3
x1
x2
(a) (b)
S S
r
x
yy-1
x
x-1
=
=2 1
2
x
afy
'
'1
2
1
2
= y x-1
FIG. 9: (a) Duas dadas parametrizacoes sao ligadas por um difeomorfismo; (b) Plano R2x1, x2 pode ser escolhido comosistema de coordenadas locais.
independentes; c) se, por exemplo, sao duas primeiras linhas, entao determinante correspondente nao e nulo:
det
(∂x1
∂ξ1∂x1
∂ξ2
∂x2
∂ξ1∂x2
∂ξ2
)6= 0. (46)
2. (A) e (B) proibem intersecoes, veja Figura 8(b). (B) e (C) proibem pontos singulares - os pontos onde r′(ξa) edescontinua, veja Fig. 8(c).3. Af. 7.1. Em uma vizinhanca de ponto r, aplicacao diferenciavel x e bijecao com x−1 diferenciavel (entao x edifeomorfismo). Em particular, x e bijcao bicontinua (homeomorfismo).Dem. Vamos anotar aplicacao x como xi = f i(ξa). De acordo com teorema sobre funcao inversa, (C) implica queum par destas funcoes, por exemplo, f1(ξa) e f2(ξa), e invertivel. Vamos anotar a funcao inversa diferenciavel como
ξa = fa(x1, x2). x e injetiva. Realmente, como fa(ξb) e invertivel, ξa1 6= ξa2 implica xa1 6= xa2 , portanto x1 6= x2. Entaox e injetiva, e pois ela e aplicacao sobrejetiva, x representa uma bijecao. Aplicacao inversa e funcao diferenciavelseguinte: x−1 : (x1, x2, x3) ∈ S → ξa = fa(x1, x2).
Portanto, forma mais compacta da definicao poderia ser: conjunto S ∈ R3 e superfıcie regular, se para cado pontode S existe uma vizinhanca dela difeomorfa de cırculo aberto de R2.
Aplicacao x(ξa) e chamada parametrizacao (ou equacao parametrica) de S, enquanto aplicacao inversa x−1 : r→ ξa
e sistema de coordinadas locais (mapa) sobre S. Os numeros ξa sao coordenadas de r ∈ S.4. Para dada S, aplicacao x nao e unica. Realmente, seja ξa = ϕa(ξ′b) - um difeomorfismo, construa aplicacao
ydef== x ϕ, ou r = y(ξ′b) = x(ϕa(ξ′b). Ela tem O(r) como imagem, portanto descreva a mesma superfıcie S. Usando
a terminologia adotada acima, sobre O(r) existe numero infinito de sistemas de coordenadas.
Exemplo 7.1. Seja o ponto r tem coordenadas ξa0 6= 0 em sistema ξa. Entao em sistema ξ′adef== ξa − ξa0 este ponto
tem coordenadas ξ′a = 0. Portanto, na definicao de superfıcie regular poderıamos assumir, que U e um cırculo abertodo ponto 0 ∈ R2ξa, e r = x(0, 0).5. Af. 7.2. Duas parametrizacoes de S, x : ξa → S e y : ξ′a → S sao ligadas por meio de um difeomorfismoϕ : ξ′a = ϕa(ξb). Usando este difeomorfismo, podemos escrever: y(ξ′a) = x(ϕb(ξ′a)) e x(ξa) = y(ϕb(ξa)), onde ϕ einversa de ϕ.
Dem. Construa ϕdef== y−1 x e inversa dela ϕ
def== x−1 y, veja Fig. 9(a). As aplicacoes sao diferenciaveis por
construcao. As funcoes ξ′a = ϕa(ξb) sao chamadas funcoes de passagem entre sistemas ξ e ξ′. Fazendo calculos, e util
usar notacao ξ′a = ξ′a(ξb). Observe: se ξa = ϕa(ξ′b) - aplicacao inversa de ξ′a = ϕa(ξb), entao as matrizes ∂ϕa
∂ξ′be ∂ϕa
∂ξb
sao inversas:
∂ϕa
∂ξ′b
∣∣∣∣ξ′=ϕ(ξ)
∂ϕb
∂ξc= δac, ou, equivalente:
∂ξa
∂ξ′b
∣∣∣∣ξ′(ξ)
∂ξ′b
∂ξc= δac. (47)
Exercıcio 7.1. Confirme isto, calculando derivadas da identidade: ϕa(ϕb(ξc)) = ξa.Exemplo 7.2. Localmente, S pode ser parametrizada por uma das seguintes aplicacoes:
y :
x1 = η1
x2 = η2
x3 = f(η1, η2)ou
x1 = η1
x2 = f(ηa)x3 = η2
ou
x1 = f(ηa)x2 = η1
x3 = η2. (48)
Dem. Seja x com xi = f i(ξa) - uma paramatrizacao de S. De acordo com teorema sobre funcao inversa, (C) implicaque um par destas funcoes, por exemplo, f1(ξb) and f2(ξb), e invertivel. Considere o sistema ηa = fa(ξb) e resolva

III Definicao de superfıcie regular 17
r
r
r
r '
1
2=
= r ' 0
0
( 0, 0)
( )
( )
d
r
rd
dd
FIG. 10: Vetores tangentes as curvas coordenadas formam base natural no plano tangente a supefıcie.
dele: ξa = fa(ηb). Como fa e diferenciavel, podemos pegar ηa como um sistema de coordenadas sobre S. Substituindo
ξa = fa(ηb) em xi = f i(ξa) obtemos parametrizacao desejada
y :
x1 = η1
x2 = η2
x3 = f3(fa(ηb)), inversa: y−1 : (x1, x2, x3) ∈ S → η1 = x1, η2 = x2. (49)
Observe que papel de sistema de coordenadas faca plano R2x1, x2 de R3, e aplicacao y−1 e projecao de S sobre oplano, veja Fig. 9(b).
Como y = x f , aplicacao y e diferenciavel por construcao, entao representa parametrizacao de S.
6. Vamos discutir algumas consequencias da condicao de regularidade: rank(∂r∂ξ1 ,
∂r∂ξ2
)= 2. Dada parametrizacao de
superfıcie r = x(ξa), considere imagens r(ξ1) = x(ξ1, ξ20) e r(ξ2) = x(ξ1
0 , ξ2) das retas coordenadas (ξ1, ξ2
0) e (ξ10 , ξ
2)que passam pelo ponto (ξ1
0 , ξ20) ∈ R2, veja Fig. 10. As curvas resultantes r(ξ1) e r(ξ2), que passam pelo ponto r(ξ1
0 , ξ20)
de S sao chamadas curvas-coordenadas. Vetores tangentes delas sao
∂r(ξ1)
∂ξ1≡ r′1,
∂r(ξ2)
∂ξ2≡ r′2. (50)
Observe, que estes vetores coincidem com colunas de matriz (45), e portanto tem seguintes propriedades:a) r′1 e r′2 sao linearmente independentes no cado ponto de S.b) Vetor unitario
ndef==
[r′1, r′2]
|[r′1, r′2]|6= 0, (51)
representa um vetor normal ao plano deles. Os vetores r′1, r′2 e n compoem uma base de R3 (geralmente naoortonormal) associada com ponto r(ξ1
0 , ξ20) de S.
c) Matriz, composta de produtos escalares
g(ξa) =
(g11 g12
g21 g22
)=
((r′1, r
′1) (r′1, r
′2)
(r′2, r′1) (r′2, r
′2)
)≡(E FF G
), (52)
e chamada metrica de superfıcie em sistema ξ. Por construcao, metrica e matriz simetrica, e tem as propriedadesg11 > 0, g22 > 0 (matriz positiva), e det g > 0 (matriz nao-degenerada). A ultima propriedade segue do calculo direto:
det g = |r′1|2|r′2|2 − (r′1, r′2)2 =
|r′1|2|r′2|2 − (|r′1||r′2| cos θ)2 = |r′1|2|r′2|2(1− cos2 θ) = |r′1|2|r′2| sin2 θ = |[r′1, r′2]|2 > 0, (53)
de acordo com Item. b).Como vamos ver adiante, a metrica e uma das caracterısticas mais importantes para analise das propriedades locais
de uma superfıcie. Dada parametrizacao r(ξa) de S, jeito pratico para encontrar a metrica e calcular produto escalar
dos diferenciais: (dr, dr) = dxidxi = ∂xi
∂ξa∂xi
∂ξbdξadξb = gabdξ
adξb.
A forma quadratica gabvavb, associada com metrica, e chamada primeira forma fundamental de superfıcie.
Af. 7.3. Seja x : ξa → S e y : ξ′β → S sao duas parametrizacoes de S, e x′a = ∂x∂ξa e y′β = ∂y
∂ξ′β- vetores tangentes
as curvas coordenadas. Entao estes quatro vetores ficam no mesmo plano.

III Definicao de superfıcie regular 18
Dem. De acordo com Af. 7.2 podemos escrever r = x(ξa) = y(ξ′β(ξc)), e calculando derivadas ∂∂ξa podemos relacionar
vetores tangentes: ∂x∂ξa = ∂y
∂ξ′β∂ξ′β
∂ξa ou seja x′a = ∂ξ′β
∂ξa y′β . Como vetores x′a sao combinacoes lineares dos y′β , todos eles
ficam no mesmo plano.
Matriz composta de derivadas das funcoes de passagem e chamada matriz de Jacobi. Vamos anotar dela7 ∂ϕβ
∂ξa ≡∂ξ′β
∂ξa = aβa, e resumir formulas equivalentes que relacionam os vetores tangentes
x′a =∂ξ′β
∂ξay′β , ou x′a = y′βa
βa, (54)
Usando equacoes (52) e (54), imediatamente obtemos regra de transformacao de metrica: gab(ξ) =∂ϕα
∂ξa∂ϕβ
∂ξbg′αβ(ξ′)
∣∣∣ξ′(ξ)
, ou, equivalente
gab(ξ) =∂ξ′α
∂ξa∂ξ′β
∂ξbg′αβ(ξ′)
∣∣ξ′(ξ)
, ou g = aT g′a. (55)
Componentes de metrica inversa g−1 vamos anotar gbc, gabgbc = δa
c. Para encontrar a regra de transformacao deg−1, pega inversa de ultima igualdade em (55)
g−1 = (a−1)g′−1(a−1)T ou gac(ξ) =∂ξa
∂ξ′σ∂ξc
∂ξ′γg′σγ(ξ′)|ξ′(ξ) . (56)
As formulas (55) e (56) mostram, que posicao de index acima ou abaixo indica regra de transformacao dele. Nasformulas do tipo (55) e (56) e costume nao apontar a substituicao |ξ′(ξ).Superfıcie orientada. Usando um sistema de coordenadas, na formula (51) nos definimos um campo diferenciavelde vetores normais unitarios a S. Vamos ver, o que acontece, se vamos escolher um outro sistema de coordenadas
sobre S. Seja x : ξa → S e y : ξ′a → S - duas sistemas, vamos comparar os vetores n(ξ) =[x′
1,x′2]
|[x′1,x
′2]| e n′(ξ′) =
[y′1,y
′2]
|[y′1,y
′2]| .
Temos [x′1,x′2] = a1
aa2b[y′a,y
′b] = (a1
1a22 − a1
2a21)[y′1,y
′2] = det a [y′1,y
′2]. Portanto
n(ξ) =det a
|det a|n′(ξ′), ou n(ξ) = ±n′(ξ′). (57)
Conjunto de sistemas locais e formado por dois subconjuntos (disjuntos), sendo cado subconjunto contem sistemasligados por meio de matriz de Jacobi com det a > 0. De acordo com (57), todos sistemas de um subconjuntoproduzem mesmo campo normal n(r), enquanto outro subconjunto produze o campo −n(r). Localmente, todasuperfıcie regular admite dois campos normais (57). Quando um destes campos foi escolhido e fixado, vamos dizerque temos uma superfıcie orientada. Nos calculos abaixo sempre trabalhamos com uma superfıcie orientada. Se umasuperfıcie admite um campo normal unitario sobre toda ela, ela e chamada orientavel. Faixa de Mobius e garrafa deKlein representam exemplos dos superfıcies nao orientaveis.
B. Superfıcie parametrizada, superfıcie grafico e superfıcie implıcita.
Por definicao, superfıcie regular e um subconjunto de R3 que obedece certas propriedades. Vamos descrever tresjeitos padroes para construir tal subconjunto.Superfıcie parametrizada. Pega 3 funcoes f i(ξ1, ξ2) e construa conjunto Sp = Im f . Se f i obedecem as condicoes(B) e (C) da definicao, temos superfıcie regular chamada superfıcie parametrizada.Exemplo 8.1. Considere aplicacao
x = x = sin θ cosφ, y = sin θ sinφ, z = cos θ (58)
de aberto U = 0 < θ < π, 0 < φ < 2π em R3, veja Fig. 11(a). Como x2 + y2 + z2 = 1, imagem da aplicacao e esferade raio 1 a menos os pontos de semi-meridiano. Observe que coordenadas θ e φ tem visualizacao como angulos emR3.
7 Para elemento aβa de matriz, o primeiro index (ou seja, a esquerda) representa numero de linha. Ele pode ficar acima ou abaixo.
Portanto temos regra padrao de transposicao: (aT )βa = aaβ , e ∂ϕa
∂ξ′β≡ ∂ξa
∂ξ′β= (a−1)aβ , ((a−1)T )aβ = (a−1)β
a.

III Superfıcie parametrizada, superfıcie grafico e superfıcie implıcita 19
xx
x
1
2
3
x
r
(a) (b)
r
y
x
z
ba0r
2
FIG. 11: Superfıcies parametrizadas: (a) esfera; (b) plano.
Exercıcio 8.1. Confirme que a condicao (C) esta satisfeita.Exercıcio 8.2. Encontre vetores tangentes as curvas coordenadas e metrica de esfera.Exemplo 8.2. Superfıcie parametrizada r = r0 + aξ1 + bξ2 e plano que passa pelo ponto r0 e contem vetores naocolineares a e b, veja Fig. 11(b).Supomos que a e b foram escolhidos ortonormais. Vamos encontrar metrica do plano em coordenadas ξ: (dr, dr) =(adξ1 + bdξ2,adξ1 + bdξ2) = (dξ1)2 + (dξ2)2, portanto
g =
(1 00 1
). (59)
Exercıcio 8.3. Considere o plano r = r0 + aη1 + bη2, onde r0 = (1, 2, 3), a = (2, 1, 1) e b(−1, 3, 1). Encontre metricado plano em coordenadas η.Superfıcie grafico de funcao f . Dada funcao diferenciavel f(x, y) : U ⊂ R2 → R, o conjunto de R3 seguinte:Sg = r = (x, y, f(x, y) e superfıcie regular. Para confirmar isto, observe que para o conjunto Sg existe aplicacao
x : (ξ1, ξ2) ∈ U → Sg; x = (x = ξ1, y = ξ2, z = f(ξ1, ξ2)), (60)
que obedece as condicoes (A)-(C).Comparando esta construcao com Eq. (48), temos
Af. 8.1. Localmente, cada superfıcie regular e grafico de uma funcao.Exemplo 8.3. Superfıcie grafico de funcao
f =√
1− x2 − y2 (61)
e semi esfera de raio 1.Superfıcie implıcita. Dada funcao diferenciavel Φ(x, y, z) : U ⊂ R3 → R com (∂xΦ)2 + (∂yΦ)2 + (∂zΦ)2 6= 0 (ou,equivalente, ∇Φ 6= 0), o conjunto Si = (x, y, z) : Φ(x, y, z) = 0 e superfıcie regular. Realmente, supomos ∂zΦ 6= 0.De acordo com teorema de funcao implıcita, existe funcao z = f(x, y) tal, que o conjunto Sg = (x, y, f(x, y) econjunto de solucoes de equacao Φ(x, y, z) = 0. Em outras palavras, Si coincide com Sg. Mas Sg e superfıcie regular,como nos ja vimos acima.
Observe, que Si poderia ser definida como contra-imagem Φ−1(0) de valor 0 de aplicacao Φ : R3 → R.Exemplo 8.4. Superfıcie implıcita associada com funcao Φ = x2 + y2 + z2 − 1 e esfera de raio 1.Exemplo 8.5. Superfiıcie Φ = (r− r0,n) e plano pelo ponto r0, com vetor normal n.
C. Plano tangente a superfıcie.
Considere plano que passa pelo ponto r0 ∈ S, com vetor normal unitario n. Dado ponto r ∈ S, vamos anotar P oponto de projecao de r no plano, entao d(r, P ) e distancia do r ao plano, veja Fig. 12.Def. O plano e chamado tangente a S no ponto r0, se
limr→r0
d(r, P )
d(r, r0)= 0, ou sinφ
r→r0−→ 0. (62)

III Plano tangente a superfıcie 20
1
2
r
'
'
n
0
P
r r
r
r
FIG. 12: Definicao do plano tangente
Observe que por construcao, o plano tangente nao depende da escolha de sistema de coordenadas sobre S (um sistemanao foi mencionado na definicao).Af. 9.1. Superfıcie regular tem unico plano tangente no cado ponto. Se r(ξa) uma parametrizacao de S, o planotangente e plano dos vetores r′1 e r′2.Dem. Usando series de Taylor, d(r, r0) = |4r| = |r(ξa +4ξa)− r(ξa)| = |r′a4ξa + r′′ab4ξa4ξb + O3(4ξa)|, temos
limr→r0
d(r, P )
d(r, r0)= lim
r→r0
|(4r,n)||4r|
=
lim4ξa→0
|(r′a,n)4ξa + (r′′ab,n)4ξa4ξb + (O3(4ξa),n)||r′a4ξa + r′′ab4ξa4ξb + O3(4ξa)|
. (63)
Vamos calcular este limite para caminho com 4ξ2 = 0 (limite de funcao de uma variavel):
lim4ξ1→0
|(r′1,n)4ξ1 + (r′′11,n)(4ξ1)2 + (O3(4ξa),n)||r′14ξ1 + r′′11(4ξ1)2 + O3(4ξa)|
=(r′1,n)
|r′1|.
Este limite vai se anular, se (r′1,n) = 0. Para o caminho com 4ξ1 = 0 obtemos (r′2,n) = 0. Portanto o plano tangentenecessariamente e plano dos vetores r′a. Agora podemos confirmar que para este plano o limite (63) existe e e nulo:Exercicio 9.1. Calcule limite em coordenadas polares (lembre-se que limite de funcao de duas variaveis se reduz alimite de uma variavel em coordenadas polares: lim~ξ→~ξ0 f(ξ1, ξ2) = limr→0 f(ξ1
0 + r cos θ, ξ20 + r sin θ)).
Em parametrizacao ξa, plano dos vetores r′a e unico. Usando uma outra parametrizacao, obtemos o mesmo planode acordo com Af. 7.3.
De acordo com este analise, como vetor normal unitario do plano tangente podemos pegar n =[r′1,r
′2]
|[r′1,r′2]| .
Exemplo 9.1. Equacao do plano tangente nas varias situacoes:Superfıcie parametrizada r(ξa): (r− r0, [r
′1(r0), r′2(r0)]) = 0.
Superfıcie grafico de z = f(x, y): z − f(x0, y0) = f ′x(x0, y0)(x− x0) + f ′y(x0, y0)(y − y0).Superfıcie implıcita Φ(x, y, z) = 0: Φ′x(r0)(x− x0) + Φ′y(r0)(y − y0) + Φ′z(r0)(z − z0) = 0.
D. Curva sobre superfıcie. Coordenadas de vetor tangente e espaco tangente a superfıcie.
Curva γ ⊂ R3 e curva sobre S, se γ ⊂ S. Imagine todas as curvas sobre S que passam pelo dado ponto r0, econstrua vetores tangentes delas neste ponto. Nos vamos ver, que estes vetores ficam no plano tangente e formamespaco vetorial de duas dimencoes, chamado espaco tangente Tr0(S). Como r′1 e r′2 (veja (50)) representam uma basede espaco tangente, podemos escrever os vetores tangentes nesta base: V = r′av
a. Os numeros v1 e v2 sao chamadoscoordenadas de V. Vamos ver esta construcao com detalhes.
Seja r(t) e uma paramertizacao de γ. Aplicacao x−1 r : It → R2ξa determina a curva ξa(t) ⊂ R2 chamadarepresentante de r(t) em coordenadas ξ. Temos por construcao: r(t) = x(ξa(t)). Invertendo o procedimento, obtemos
jeito simples para construir uma curva sobre superfıcie: cada curva ξa(t) ⊂ R2 determina seguinte curva: r(t)def==
x(ξa(t)) ⊂ S, veja Figura 13. Usando esta relacao, vetor tangente V = dr(t)dt de curva r(t) podemos apresentar em
termos de vetor tangente va ≡ dξa
dt de representante ξa(t): V = dr(ξa(t))dt = ∂r
∂ξadξa
dt = r′adξa
dt = r′ava. Calculando
produto escalar com r′b, obtemos: va = gab(r′b,V).

III Produto escalar, comprimento de arco e area em coordenadas locais 21
r
r '=
(t)
x
va(t)
dtd
(t)
FIG. 13: Representante ξa(t) de curva r(t) e coordenadas va de vetor tangente r′
Def. Se ξa(t) representa r(t), os numeros va ≡ dξa
dt sao chamados coordenadas de vetor V = dr(t)dt em sistema ξ.
Como vimos acima, relacoes basicas entre vetor e coordenadas dele sao
V = r′ava, entao va = gab(r′b,V). (64)
Ultima formula mostra claramente, que dado vetor V, coordenadas dele va nao dependem de escolha das curvas r(t)e ξa(t).Exercıcio 10.1. Encontre coordenadas dos vetores r′1 e r′2.
Eq. (64) mostra que todo V e combinacao linear dos vetores basicos do plano tangente r′a. Portanto obtemosAf. 10.1. Seja γ = Im r(t) ⊂ S, e r(t0) = r0. Vetor tangente V = dr
dt
∣∣t0
pertence ao plano tangente de S no pontor0.Af. 10.2. Se V e W sao vetores tangentes, entao aV + bW tambem e vetor tangente.Realmemte, aV + bW e vetor tangente a curva x(ξa(t0) + [ava + bωa]t). Estas afirmacoes justificam a definicaoseguinte.Def. Espaco tangente Tr(S) e conjunto de todos vetores tangentes das curvas de S que passam pelo r.Tr(S) e espaco vetorial de duas dimencoes com base r′1, r′2. Geometricamente, Tr(S) coincide com plano tangente
de S no ponto r. Este espaco vetorial e equipado com produto escalar (V,W) = V iW i.Sistemas de coordenadas sobre S sao ligados por funcoes de passagem ξ′α = ϕα(ξb), portando para representantes
de uma curva de S temos ξ′α(t) = ϕα(ξb(t)). Calculando derivada: dξ′α
dt = ∂ϕα
∂ξbdξb
dt obtemos regra de transformacao
de coordenadas de V no passagem de ξ′ para ξ
v′α =∂ϕα
∂ξbvb, ou v′α =
∂ξ′α
∂ξbvb. (65)
Exercıcio 10.2. Considere vetor V = (0, 0, 1) no ponto (1, 0, 0) de circunferencia x2 + y2 = a2, z = 0. Vamos girardele no plano xz (no sentido antihorario) pelo angulo ϕ
2 e, no mesmo tempo, girar este plano em torno de eixo Ozpelo angulo ϕ. Observe, que ele volta no ponto inicial, tendo sentido oposto. Encontre vetor resultante no cado pontode circunferencia. Resposta: V(a cosϕ, a sinϕ, 0) = (sin ϕ
2 cosϕ, sin ϕ2 sinϕ, cos ϕ2 ).
E. Produto escalar, comprimento de arco e area em coordenadas locais.
E instrutivo escrever produto escalar (definido no espaco tangente: (V,W) = V 1W 1 + V 2W 2 + V 3W 3,) emcoordenadas locais
(V,W) = (r′ava, r′bω
b) = (r′a, r′b)v
aωb = gabvaωb, (66)
onde gab(ξc) e metrica de S. Usando (66) na expressao para comprimento de arco (25), obtemos formula para calcular
dele em coordenadas locais
l =
∫ b
a
√gab
dξa
dt
dξb
dtdt. (67)
Entao podemos calcular estas grandezas de S sabendo coordenadas e metrica de S.Exercıcio 11.1. Confirme expressao para angulo entre vetores tangentes as curvas coordenadas: cos(r′1, r
′2) = g12√
g11g22.
Exercıcio 11.2. Usando (65) e (55) confirme, que valor de produto escalar (66), comprimento de arco (67) e angulono exercıcio anterior nao dependem de sistema de coordenadas (entao representam funcoes escalares).

III Produto escalar, comprimento de arco e area em coordenadas locais 22
Ui
U
r
r
r
r ( )
( )
r '
'2
1
r( )
( )
i
ii
FIG. 14: Definicao de area
Comentario. Produto escalar (66) determina forma quadratica8
g(V) ≡ (V,V) = (V 1)2 + (V 2)2 + (V 3)2 = gabvavb, (68)
chamada primeira forma fundamental de S.Def. Seja U ⊂ S uma regiao, e x−1(U) = Ω ⊂ R2 - regiao plana correspondente em R2. Area de U e numero
A =
∫Ω
√det g d2ξ, (69)
ou seja, integral dupla sobre regiao plana Ω de R2.Exercıcio 11.3. Confirme que A nao depende da escolha de coordenadas ξ.
Vamos confirmar, que Eq. (69) esta em correspondencia com nossa visao intuitiva de area. Usando uma rede
das curvas coordenadas, vamos dividir a regiao U por paralelogramos pequenos U = ∪Ni=1Ui, veja Fig. 14. Area deparalelogramo curvo Ui e proxima da area de paralelogramo plano formado de vetores
r(ξ1 +4ξ1, ξ2)− r(ξ1, ξ2) = r′14ξ1 + O2(4ξ1),r(ξ1, ξ2 +4ξ2)− r(ξ1, ξ2) = r′24ξ2 + O2(4ξ2),
veja Fig. 14. Portanto para area de Ui temos aproximadamente A(Ui) = |[r′14ξ1, r′24ξ2]| + O3(4ξa) ≈|[r′1, r′2]|4ξ14ξ2, e area de regiao toda fica
A = limN→∞
N∑i=1
A(Ui) =
∫Ω
|[r′1, r′2]|d2ξ =
∫Ω
√([r′1, r
′2], [r′1, r
′2]) d2ξ =∫
Ω
√(r′1)2(r′2)2 − (r′1, r
′2)2 d2ξ =
∫Ω
√g11g22 − g2
12 d2ξ =
∫Ω
√det g d2ξ. (70)
F. Discussao.
Propriedades geometricas de superfıcie nos poderıamos descrever usando geometria Euclideana do espaco-ambienteR3, veja coluna esquerda de Tabela I. Geometria diferencial adota outro jeito: usando difeomorfismo, superfıcie Sfoi identificada com (parte do) plano R2ξa, equipado com estrutura adicional: metrica gab(ξ
c). Como nos vimos(coluna direta de Tabela I), podemos usar este ”retrato” de superfıcie para descrever geometria dela sem mencionarespaco-ambiente R3. Para as characteristicas geometricas de S que ja foram discutidas, toda informacao sobre elase contida em metrica. Como vamos ver adiante, metrica contem tambem toda informacao necessaria para estudarpropriedades dos campos vetoriais sobre S, inclusive nocoes de campo constante, transporte paralelo e taxa de variacaode campo no passagem de um ponto de S para outro.
8 Em algebra linear, usando produto interno de espaco vetorial V, com dada matriz g (operador linear) podemos associar forma bilinear,ou seja, aplicacao V× V→ R: V,W→ (V, gW), e forma quadratica correspondente: (V, gV).
III Discussao 23
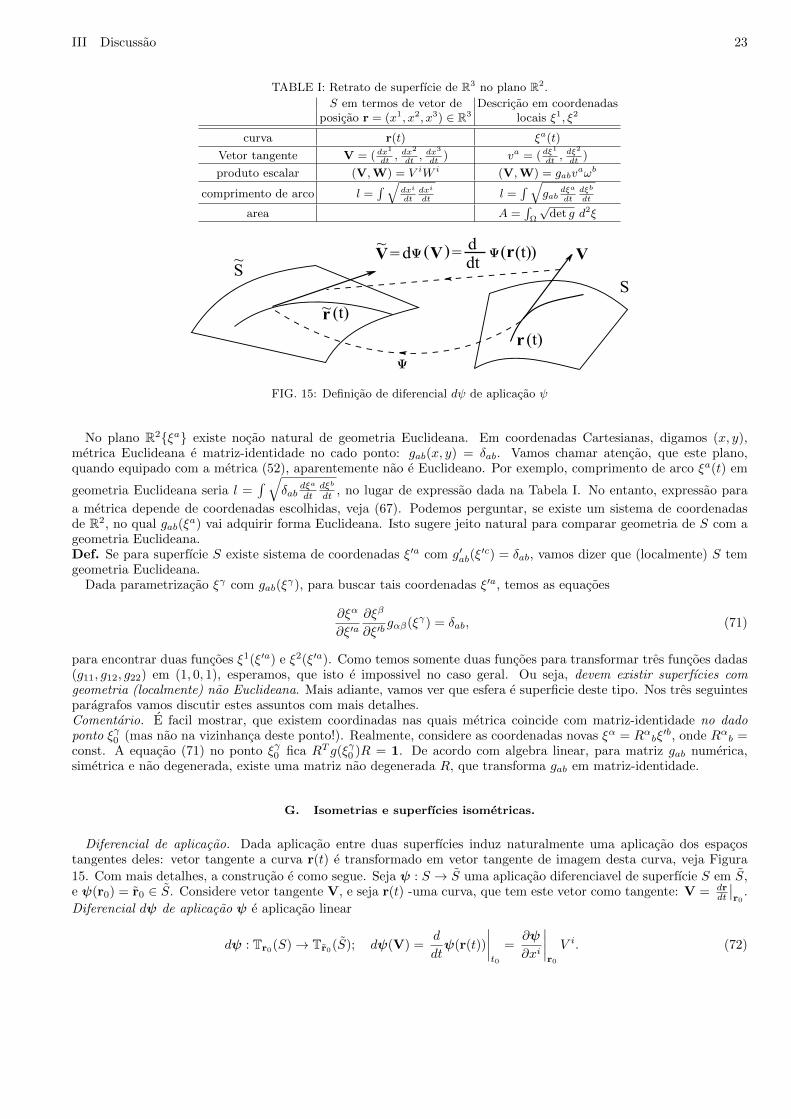
TABLE I: Retrato de superfıcie de R3 no plano R2.
S em termos de vetor de Descricao em coordenadasposicao r = (x1, x2, x3) ∈ R3 locais ξ1, ξ2
curva r(t) ξa(t)
Vetor tangente V = ( dx1
dt, dx
2
dt, dx
3
dt) va = ( dξ
1
dt, dξ
2
dt)
produto escalar (V,W) = V iW i (V,W) = gabvaωb
comprimento de arco l =∫ √
dxi
dtdxi
dtl =
∫ √gab
dξa
dtdξb
dt
area A =∫
Ω
√det g d2ξ
r (t)
dtd
~S
S
r (t)~
~ r(t) VV (d= )=)V(
FIG. 15: Definicao de diferencial dψ de aplicacao ψ
No plano R2ξa existe nocao natural de geometria Euclideana. Em coordenadas Cartesianas, digamos (x, y),metrica Euclideana e matriz-identidade no cado ponto: gab(x, y) = δab. Vamos chamar atencao, que este plano,quando equipado com a metrica (52), aparentemente nao e Euclideano. Por exemplo, comprimento de arco ξa(t) em
geometria Euclideana seria l =∫ √
δabdξa
dtdξb
dt , no lugar de expressao dada na Tabela I. No entanto, expressao para
a metrica depende de coordenadas escolhidas, veja (67). Podemos perguntar, se existe um sistema de coordenadasde R2, no qual gab(ξ
a) vai adquirir forma Euclideana. Isto sugere jeito natural para comparar geometria de S com ageometria Euclideana.Def. Se para superfıcie S existe sistema de coordenadas ξ′a com g′ab(ξ
′c) = δab, vamos dizer que (localmente) S temgeometria Euclideana.
Dada parametrizacao ξγ com gab(ξγ), para buscar tais coordenadas ξ′a, temos as equacoes
∂ξα
∂ξ′a∂ξβ
∂ξ′bgαβ(ξγ) = δab, (71)
para encontrar duas funcoes ξ1(ξ′a) e ξ2(ξ′a). Como temos somente duas funcoes para transformar tres funcoes dadas(g11, g12, g22) em (1, 0, 1), esperamos, que isto e impossivel no caso geral. Ou seja, devem existir superfıcies comgeometria (localmente) nao Euclideana. Mais adiante, vamos ver que esfera e superficie deste tipo. Nos tres seguintesparagrafos vamos discutir estes assuntos com mais detalhes.Comentario. E facil mostrar, que existem coordinadas nas quais metrica coincide com matriz-identidade no dadoponto ξγ0 (mas nao na vizinhanca deste ponto!). Realmente, considere as coordenadas novas ξα = Rαbξ
′b, onde Rαb =const. A equacao (71) no ponto ξγ0 fica RT g(ξγ0 )R = 1. De acordo com algebra linear, para matriz gab numerica,simetrica e nao degenerada, existe uma matriz nao degenerada R, que transforma gab em matriz-identidade.
G. Isometrias e superfıcies isometricas.
Diferencial de aplicacao. Dada aplicacao entre duas superfıcies induz naturalmente uma aplicacao dos espacostangentes deles: vetor tangente a curva r(t) e transformado em vetor tangente de imagem desta curva, veja Figura
15. Com mais detalhes, a construcao e como segue. Seja ψ : S → S uma aplicacao diferenciavel de superfıcie S em S,e ψ(r0) = r0 ∈ S. Considere vetor tangente V, e seja r(t) -uma curva, que tem este vetor como tangente: V = dr
dt
∣∣r0
.
Diferencial dψ de aplicacao ψ e aplicacao linear
dψ : Tr0(S)→ Tr0(S); dψ(V) =d
dtψ(r(t))
∣∣∣∣t0
=∂ψ
∂xi
∣∣∣∣r0
V i. (72)
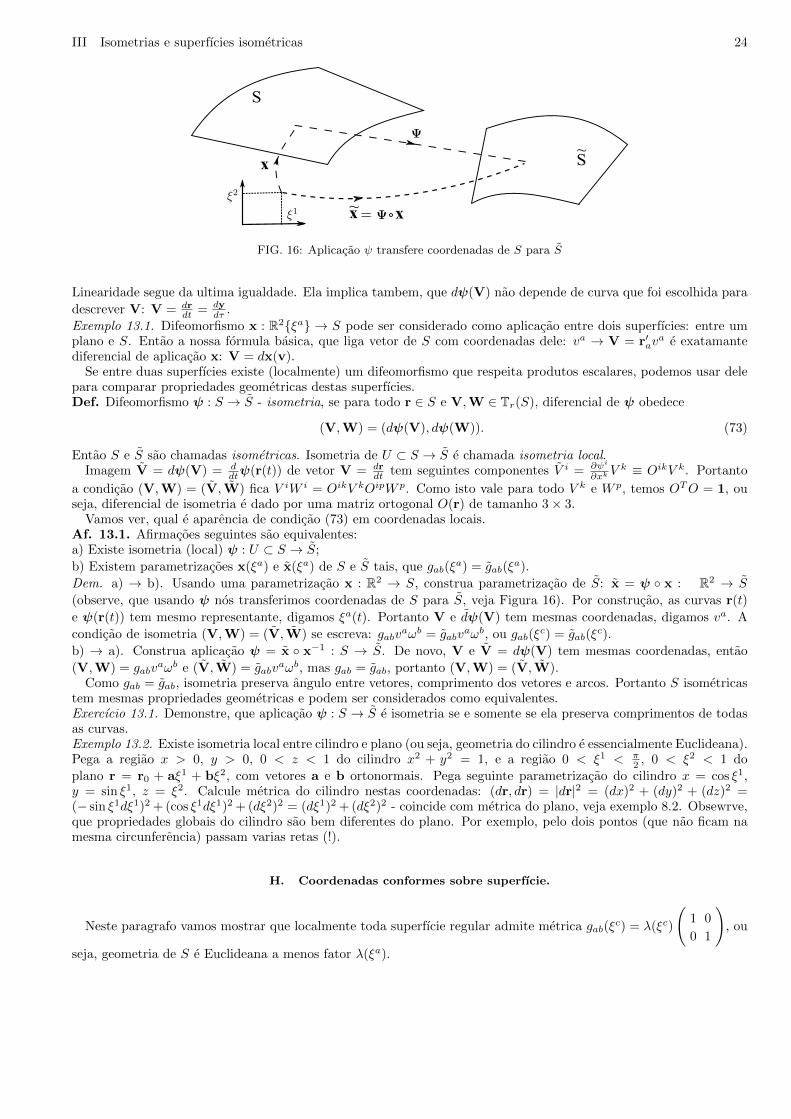
III Isometrias e superfıcies isometricas 24
~S
S
x
x~= x
FIG. 16: Aplicacao ψ transfere coordenadas de S para S
Linearidade segue da ultima igualdade. Ela implica tambem, que dψ(V) nao depende de curva que foi escolhida para
descrever V: V = drdt = dy
dτ .
Exemplo 13.1. Difeomorfismo x : R2ξa → S pode ser considerado como aplicacao entre dois superfıcies: entre umplano e S. Entao a nossa formula basica, que liga vetor de S com coordenadas dele: va → V = r′av
a e exatamantediferencial de aplicacao x: V = dx(v).
Se entre duas superfıcies existe (localmente) um difeomorfismo que respeita produtos escalares, podemos usar delepara comparar propriedades geometricas destas superfıcies.Def. Difeomorfismo ψ : S → S - isometria, se para todo r ∈ S e V,W ∈ Tr(S), diferencial de ψ obedece
(V,W) = (dψ(V), dψ(W)). (73)
Entao S e S sao chamadas isometricas. Isometria de U ⊂ S → S e chamada isometria local.Imagem V = dψ(V) = d
dtψ(r(t)) de vetor V = drdt tem seguintes componentes V i = ∂ψi
∂xkV k ≡ OikV k. Portanto
a condicao (V,W) = (V,W) fica V iW i = OikV kOipW p. Como isto vale para todo V k e W p, temos OTO = 1, ouseja, diferencial de isometria e dado por uma matriz ortogonal O(r) de tamanho 3× 3.
Vamos ver, qual e aparencia de condicao (73) em coordenadas locais.Af. 13.1. Afirmacoes seguintes sao equivalentes:a) Existe isometria (local) ψ : U ⊂ S → S;
b) Existem parametrizacoes x(ξa) e x(ξa) de S e S tais, que gab(ξa) = gab(ξ
a).
Dem. a) → b). Usando uma parametrizacao x : R2 → S, construa parametrizacao de S: x = ψ x : R2 → S
(observe, que usando ψ nos transferimos coordenadas de S para S, veja Figura 16). Por construcao, as curvas r(t)
e ψ(r(t)) tem mesmo representante, digamos ξa(t). Portanto V e dψ(V) tem mesmas coordenadas, digamos va. A
condicao de isometria (V,W) = (V,W) se escreva: gabvaωb = gabv
aωb, ou gab(ξc) = gab(ξ
c).
b) → a). Construa aplicacao ψ = x x−1 : S → S. De novo, V e V = dψ(V) tem mesmas coordenadas, entao
(V,W) = gabvaωb e (V,W) = gabv
aωb, mas gab = gab, portanto (V,W) = (V,W).Como gab = gab, isometria preserva angulo entre vetores, comprimento dos vetores e arcos. Portanto S isometricas
tem mesmas propriedades geometricas e podem ser considerados como equivalentes.Exercıcio 13.1. Demonstre, que aplicacao ψ : S → S e isometria se e somente se ela preserva comprimentos de todasas curvas.Exemplo 13.2. Existe isometria local entre cilindro e plano (ou seja, geometria do cilindro e essencialmente Euclideana).Pega a regiao x > 0, y > 0, 0 < z < 1 do cilindro x2 + y2 = 1, e a regiao 0 < ξ1 < π
2 , 0 < ξ2 < 1 do
plano r = r0 + aξ1 + bξ2, com vetores a e b ortonormais. Pega seguinte parametrizacao do cilindro x = cos ξ1,y = sin ξ1, z = ξ2. Calcule metrica do cilindro nestas coordenadas: (dr, dr) = |dr|2 = (dx)2 + (dy)2 + (dz)2 =(− sin ξ1dξ1)2 + (cos ξ1dξ1)2 + (dξ2)2 = (dξ1)2 + (dξ2)2 - coincide com metrica do plano, veja exemplo 8.2. Obsewrve,que propriedades globais do cilindro sao bem diferentes do plano. Por exemplo, pelo dois pontos (que nao ficam namesma circunferencia) passam varias retas (!).
H. Coordenadas conformes sobre superfıcie.
Neste paragrafo vamos mostrar que localmente toda superfıcie regular admite metrica gab(ξc) = λ(ξc)
(1 0
0 1
), ou
seja, geometria de S e Euclideana a menos fator λ(ξa).

III Coordenadas conformes sobre superfıcie 25
Def. Coordenadas ξa em O(r) ∈ S sao chamadas conformes, se gab(ξc) = λ(ξc)δab em todos pontos de O(r).
Exercıcio 14.1. Observe que necessariamente λ(ξc) > 0. Esta funcao e chamada fator conforme.Exercıcio 14.2. Observe que em coordenadas conformes temos: (r′1, r
′2) = 0 e V iW i = λ(ξc)vaωa. Portanto, se ξa sao
conformes, a aplicacao x : R2 → S preserva angulos.Af. 14.1. Sobre superfıcie regular S existem coordenadas locais conformes.Dem. Regra de transformacao de metrica no passagem de ξa para ξ′α e dada por equacao (55). Substituindo
g′αβ(ξ′)∣∣∣ξ′(ξ)
= λ(ξ′)|ξ′(ξ) δαβ ≡ λ(ξ)δαβ , obtemos
gab(ξ) = λ(ξ)∂ξ′α
∂ξa∂ξ′α
∂ξb. (74)
Precisa mostrar, que dadas gαβ(ξγ), este sistema tem como solucao um difeomorfismo ξ′α(ξa) para uma funcao λ(ξa).Vamos apresentar (74) em forma de sistema de equacoes lineares em relacao de derivadas de ∂aξ
′α. Denotando
Ω =
(∂1ξ′1 ∂2ξ
′1
∂1ξ′2 ∂2ξ
′2
)≡
(a b
c d
), (75)
o nosso sistema fica g = λΩTΩ. Calculando determinante, obtemos expressao para λ: λ =√
det gdet Ω . Com este λ, nosso
sistema fica gΩ−1 =√
det gdet Ω ΩT , ou
g
(d −b−c a
)=√
det g
(a c
b d
). (76)
Com mais detalhes, podemos escrever
g
(d
−c
)=√
det g
(a
b
), (77)
g
(−ba
)=√
det g
(c
d
). (78)
Exercıcio 14.3. Aplique inversa de g no sistema (77), e confirme que equacoes resultantes coincidem com equacoes(78).
De acordo com exercıcio, independentes equcoes sao (77). Aplicando matriz g−1 ao (77), e voltando aos notacoesiniciais, obtemos as equacoes
∂2ξ′2 =
1√det g
(g22∂1ξ
′1 − g12∂2ξ′1) ,
−∂1ξ′2 =
1√det g
(−g12∂1ξ
′1 + g11∂2ξ′1) . (79)
Elas tem forma
∂2v = α∂1u+ β∂2u,−∂1v = β∂1u+ γ∂2u, (80)
e sao conhecidas como eqiacoes de Beltrami. De acordo com teoria de equacoes diferenciais, equacoes de Beltramitem solucoes, ou seja, existem coordenadas conformes sobre S.Exemplo 14.1. Coordenadas conformes sobre esfera (projecao estereografica). Considere correspondencia ψ definida de
acordo com Figura 17 entre os pontos de esfera de raio R (a menos polo norte) e do plano: ψ : rM ∈ S → M(x, y) ∈ R2.Vamos mostrar que (x, y) sao coordenadas conformes de esfera. Precisamos encontrar a relacao entre rM = (x, y, z) ecoordenadas (x, y) do ponto M. A partir dos triangulos semelhantes (dois deles no plano e dois outros verticais) temosxx = y
y = |OP ||OM | = |zM |
OM= 2R−z
2R , ou
x
x=y
y=z − 2R
−2R. (81)

III Aplicacao conforme 26
~~
M
P~ y
y
z
M
O
xx
y~r
n
FIG. 17: Coordenatas conformes (x, y) de ponto M de esfera
Temos duas relacoes, precisamos mais uma: x2 + y2 = |zM | = R2 − (R− z)2 ou x2 + y2 + (z − 2R)z = 0 . Podemoslinearizar a ultima equacao usando (81): x
xxx+ yyyy + z−2R
−2r (−2Rz) = 0, ou
xx+ yy − 2Rz = 0. (82)
Resolvendo sistema linear de 3 equacoes (81) e (82), obtemos forma explicita de aplicacao ψ : rM ∈ S → M(x, y) ∈ R2
x =4R2x
x2 + y2 + 4R2, y =
4R2y
x2 + y2 + 4R2, z =
2R(x2 + y2)
x2 + y2 + 4R2. (83)
A metrica e |dr|2 = (dx)2 + (dy)2 + (dz)2 = 16R4
(x2+y2+4R2)2 [dx2 + dy2]. Comparando este resultado com a definicao,
concluırmos que (x, y) sao coordenadas conformes de esfera.Exercıcio 14.4. Encontre metrica em coordenadas locais ξ1 = x, ξ2 = y.
I. Aplicacao conforme.
Nem todas superfıcies sao localmente isometricas, como vamos ver em paragrafos ?? eIV I abaixo, mas todas saolocalmente conformes (conformemente equivalentes), como vamos ver agora.
Def. Difeomorfismo ψ : S → S e aplicacao conforme, se para todos r ∈ S e V,W ∈ Tr(S) temos:
λ(ξa)(V,W) = (dψ(V), dψ(W)). (84)
As superfıcies sao chamadas superfıcies conformes se existe uma apliccao conforme entre eles.Af. 15.1. Aplicacao conforme preserva angulos entre as curvas (entre os vetores tangentes).
Dem. Seja as curvas r(t) e p(t) interceptam em t = 0, angulo entre eles entao: (r′,p′)|r′||r′| = cos θ. De acordo com a
definicao acima, angulo entre ψ(r) e ψ(p) e
(dψ(r′), dψ(p′))
|dψ(r′)||dψ(p′)|=
λ(r′,p′)√λ|r′|√λ|p′|
= cos θ. (85)
Aplicacao conforme em coordenadas locais pode ser caracterizado como se segue.Af. 15.2. Afirmacoes seguintes sao equivalentes:a) ψ : U ⊂ S → S - aplicacao conforme;b) Existem parametrizacoes x(ξa) e x(ξa) tais, que gab(ξ
c) = λ(ξc)gab(ξc).
Dem. - Exercıcio: a demonstracao e parecida com Af. 13.1.Af. 15.3. Duas superfıcies regulares sao localmente conformes.Dem. Considerando as superfıcies em coordenadas conformes, podemos escrever gab = λδab e gab = λδab. Considereaplicacao ψ : S → S, que por definicao relaciona pontos com mesmas coordenadas. ψ e uma aplicacao conforme.
Realmente, nos pontos correspondentes temos: gab(M) = λ(ξ)δab = λ(ξ)λ(ξ)λ(ξ)δab = λ
λgab(M). Entao diferenca entre as
metricas e fator conforme ρ = λλ . De acordo com Af. 15.1, as superfıcies sao conformes.
Exemplo 15.1. No paragrafo anterior, equivalencia conforme entre esfera e plano foi confirmada por meio de calculodireto.

III Aplicacao conforme 27
LISTA DE EXERCICIOS.
Considere esfera em parametrizacao ξ1 = θ, ξ2 = ϕ, veja (58).Exercıcio III.1. Encontre vetores r′θ, r′ϕ, n, e metrica de esfera.
Exercıcio III.2. Vetor V no ponto ( 1√2, 1√
2, 0) de esfera tem coordenadas v1 = 1, v2 = 2. Encontre V.
Exercıcio III.3. Encontre coordenadas de vetor tangente V(√
34 ,
34 ,
12 ) =
4
0
−2√
3
. Resposta: va(π3 ,π3 ) =
(4
−4
).
Exercıcio III.4. Considere cruzamento de esfera por plano z = 12 . Encontre: (a) equacoes parametricas de curva
resultante γ; (b) Representante desta curva; (c) Vetor tangente V a curva γ no ponto (0,√
32 ,
12 ); (d) Coordenadas
deste vetor.Exercıcio III.5. Repete calculos de exercıcio anterior para a curva obtida por cruzamento de esfera com plano y = 1
2
(e para o ponto (0, 12 ,√
32 )).
Exercıcio III.6. Verifique, se a curva γ: r(t) = ( 12 cos[π4 (t2 + 2t)], 1
2 sin[π4 (t2 + 2t)],√
32 ) com 0 < t < 1 pertence a
esfera. Encontre representante de curva. Encontre vetores tangentes a γ e coordenadas deles para todo t.Exercıcio III.7. Considere esfera em parametrizacao ξ′1 = x, ξ′2 = y, veja (61). Repete exercıcios anteriores usandoesta parametrizacao.Exercıcio III.8. Encontre funcoes de passagem ξ′α(ξb), inversas ξb(ξ′α), e matriz de Jacobi de transformacao. Usandoregras de transformacao, encontre coordenadas de vetor de Exercıcio III.3 em coordenadas ξ′α. Usando regras detransformacao, e metrica obtida no Exercıcio III.1, encontre metrica em coordenadas ξ′α.Exercıcio III.9. Metrica de superfıcie S e (dr, dr) = du2 + (u2 + a2)dv2, a = const. Encontre: (a) perimetro detriangulo curvilinear sobre S formado por curvas com representantes: u = 1
2av2, u = − 1
2av2 e v = 1; (b) angulos
deste triangulo; (c) area de triangulo formado por u = ±av e v = 1.
Exercıcio III.10. Sobre a superfıcie r(u, v) = (u cos v, u sin v, a ln(u +√u2 − a2), encontre as curvas (chamadas lox-
odromicas), que tem angulo θ com as curvas v = const.Exercıcio III.11. Considere paraboloide z = −x2 − y2. Encontre uma base ortonormal do plano tangente dele noponto x = 1, y = 2.
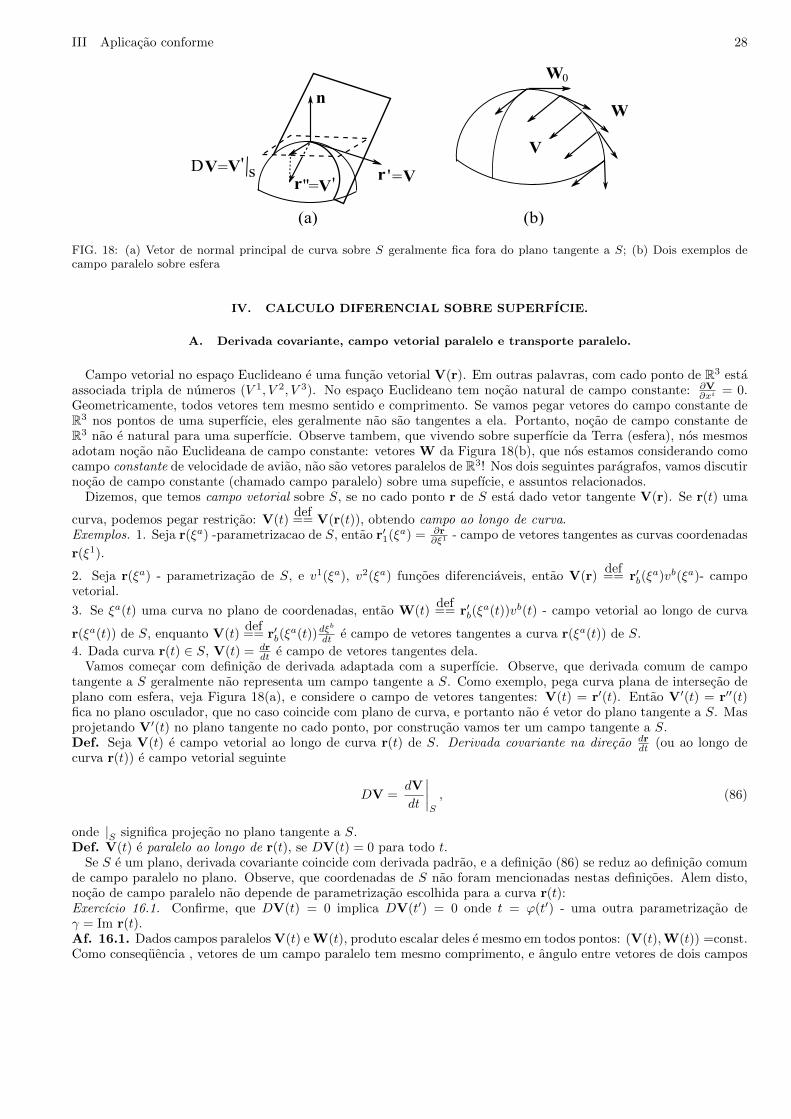
III Aplicacao conforme 28
(a) (b)
V= ' r ' =V
Vr''=D V s
'
W
0
V
W
n
FIG. 18: (a) Vetor de normal principal de curva sobre S geralmente fica fora do plano tangente a S; (b) Dois exemplos decampo paralelo sobre esfera
IV. CALCULO DIFERENCIAL SOBRE SUPERFICIE.
A. Derivada covariante, campo vetorial paralelo e transporte paralelo.
Campo vetorial no espaco Euclideano e uma funcao vetorial V(r). Em outras palavras, com cado ponto de R3 estaassociada tripla de numeros (V 1, V 2, V 3). No espaco Euclideano tem nocao natural de campo constante: ∂V
∂xi = 0.Geometricamente, todos vetores tem mesmo sentido e comprimento. Se vamos pegar vetores do campo constante deR3 nos pontos de uma superfıcie, eles geralmente nao sao tangentes a ela. Portanto, nocao de campo constante deR3 nao e natural para uma superfıcie. Observe tambem, que vivendo sobre superfıcie da Terra (esfera), nos mesmosadotam nocao nao Euclideana de campo constante: vetores W da Figura 18(b), que nos estamos considerando comocampo constante de velocidade de aviao, nao sao vetores paralelos de R3! Nos dois seguintes paragrafos, vamos discutirnocao de campo constante (chamado campo paralelo) sobre uma supefıcie, e assuntos relacionados.
Dizemos, que temos campo vetorial sobre S, se no cado ponto r de S esta dado vetor tangente V(r). Se r(t) uma
curva, podemos pegar restricao: V(t)def== V(r(t)), obtendo campo ao longo de curva.
Exemplos. 1. Seja r(ξa) -parametrizacao de S, entao r′1(ξa) = ∂r∂ξ1 - campo de vetores tangentes as curvas coordenadas
r(ξ1).
2. Seja r(ξa) - parametrizacao de S, e v1(ξa), v2(ξa) funcoes diferenciaveis, entao V(r)def== r′b(ξ
a)vb(ξa)- campovetorial.
3. Se ξa(t) uma curva no plano de coordenadas, entao W(t)def== r′b(ξ
a(t))vb(t) - campo vetorial ao longo de curva
r(ξa(t)) de S, enquanto V(t)def== r′b(ξ
a(t))dξb
dt e campo de vetores tangentes a curva r(ξa(t)) de S.
4. Dada curva r(t) ∈ S, V(t) = drdt e campo de vetores tangentes dela.
Vamos comecar com definicao de derivada adaptada com a superfıcie. Observe, que derivada comum de campotangente a S geralmente nao representa um campo tangente a S. Como exemplo, pega curva plana de intersecao deplano com esfera, veja Figura 18(a), e considere o campo de vetores tangentes: V(t) = r′(t). Entao V′(t) = r′′(t)fica no plano osculador, que no caso coincide com plano de curva, e portanto nao e vetor do plano tangente a S. Masprojetando V′(t) no plano tangente no cado ponto, por construcao vamos ter um campo tangente a S.Def. Seja V(t) e campo vetorial ao longo de curva r(t) de S. Derivada covariante na direcao dr
dt (ou ao longo decurva r(t)) e campo vetorial seguinte
DV =dV
dt
∣∣∣∣S
, (86)
onde |S significa projecao no plano tangente a S.Def. V(t) e paralelo ao longo de r(t), se DV(t) = 0 para todo t.
Se S e um plano, derivada covariante coincide com derivada padrao, e a definicao (86) se reduz ao definicao comumde campo paralelo no plano. Observe, que coordenadas de S nao foram mencionadas nestas definicoes. Alem disto,nocao de campo paralelo nao depende de parametrizacao escolhida para a curva r(t):Exercıcio 16.1. Confirme, que DV(t) = 0 implica DV(t′) = 0 onde t = ϕ(t′) - uma outra parametrizacao deγ = Im r(t).Af. 16.1. Dados campos paralelos V(t) e W(t), produto escalar deles e mesmo em todos pontos: (V(t),W(t)) =const.Como consequencia , vetores de um campo paralelo tem mesmo comprimento, e angulo entre vetores de dois campos

IV Derivada covariante, campo paralelo e transporte paralelo 29
2N1
212
d r'1d
r '2r '1
112
n
FIG. 19: Interpretacao geometrica de sımbolos de Christoffel e de segunda forma fundamenal
paralelos e mesmo em todos pontos de curva.Dem. Exercıcio 16.2. Observe, que DV(t) = 0 implica V′(t) ⊥ Tr(S).Exercıcio 16.3. Calcule d
dt (V,W).Derivada covariante pode ser usada para introduzir nocao de transporte paralelo ao longo de curva. Dada curva
r(t) com r(0) = r0 e vetor V0 no ponto r0, podemos buscar um campo V(r(t)) que e paralelo, DV = 0, e obedecea condicao V(r(0)) = V0. Vetores resultantes V(t) sao chamados resultado de transporte paralelo de V0 ao longode curva. Afirmacao 16.1 implica, que transporte paralelo preserva produto escalar de vetores transportados, emparticular, comprimentos deles e angulo entre eles. Nos vamos voltar ao assunto no paragrafo seguinte.Exemplos de campos paralelos sobre esfera - veja Figura 18(b). Campo paralelo V e paralelo tambem como campo de
R3, enquanto W nao e. Angulo entre estes campos e π2 no cado ponto. Observe que campo paralelo W e, no mesmo
tempo, um campo tangente a curva.
B. Derivada covariante em coordenadas locais, sımbolos de Christoffel, segunda forma fundamental desuperfıcie.
Considere o campo V(r) ∈ S. Em coordenadas locais temos V = r′a(ξb)va(ξb). Se r(t) = r(ξb(t)) uma curva comrepresentante ξb(t), substituindo ξb(t) na expressao de V, obtemos campo vetorial ao longo de r(t)
V(t) = r′a(ξb)∣∣ξb(t)
va(ξb(t)). (87)
Substituindo vetor desta forma na expressao para derivada covariante, obtemos expressao para ela em coordenadas
locais9. Das equacoes (87) e (86) fica claro, que vamos precisar calcular derivadas∂r′a∂ξb
, que representam taxa de
variacao de vetores r′a na direcao de curvas coordenadas ξb. A derivada∂r′a∂ξb
e um vetor de R3, portanto pode ser
escrito na base r′1, r′2, n =[r′1,r
′2]
|[r′1,r′2]| , veja Figura 19
∂r′a∂ξb
= Γcabr′c +Nabn. (88)
Como Γcab = Γcba, esta grandeza admite ate 6 componentes independentes. Componentes Γcab sao chamados sımbolosde Christoffel (coeficientes de conexao ou coeficientes afim). Como vamos ver, eles de fato determinam a regra detransporte paralelo sobre S. Relacoes (88) sao conhecidas como equacoes de Gauss-Weingarten.
Estamos prontos para reescrever a derivada covariante em coordenadas locais. Substituindo vetor (87) na expressaode derivada covariante, obtemos
DV =d
dt(var′a)
∣∣∣∣S
=
(dva
dtr′a +
∂r′a∂ξb
dξb
dtva)∣∣∣∣
S
=
9 Como todo vetor tangente, DV pode ser escrito na base r′a de Tr(S): DV = r′a(Dv)a, onde (Dv)a vao apresentar coordenadas decampo DV.

IV Derivada covariante em coordenadas locais, siımbolos de Christoffel, SFF 30[(dvc
dt+ Γcba
dξb
dtva)
r′c +Nabva dξ
b
dtn
]∣∣∣∣S
=
(dvc
dt+ Γcba
dξb
dtva)
r′c. (89)
Entao
DV = r′aDva, onde Dva =
dva
dt+ Γabc
dξb
dtvc. (90)
Dva representa derivada covariante em coordenadas locais. De acordo com (90), o campo V e paralelo ao longo der(ξa(t)): DV = 0, se e somente se Dva = 0.
Se va(ξb) e campo no plano de coordenadas, e va(ξb(t)) - restricao dele sobre uma curva ξb(t), podemos escrever
Dva =dξb
dtDbv
a, onde Dbva =
∂va
∂ξb+ Γabcv
c. (91)
Dbva e chamada derivada covariante na direcao de curva coordenada ξb. Escrevendo D = ξ′bDb, podemos dizer, que
Db e analogo de derivada parcial ∂b, e D - analogo de derivada direcional de analise matematica.Comentarios.1. Transporte paralelo em coordenadas locais, e interpretacao de derivada covariante em termos de transporteparalelo. Dados dois numeros va0 e uma curva ξb(t), resolva problema seguinte para va(t)
dva
dt+ Γabc
dξb
dtvc = 0, va(0) = va0 . (92)
Observe, que para dada curva ξb(t), o problema tem unica solucao. O campo V = r′ava(t) vai ser um campo paralelo:
DV = 0, chamado resultado de transporte paralelo de vetor V0 = r′a(ξc(0))va0 ao longo de curva r(ξc(t)). Escreva
derivada covariante no ponto t em forma seguinte (vamos anotar dξb
dt = ξb)
Dva =dva
dt+ Γabcξ
bvc = lim4t→0
[va(t+4t) + Γabcξbvc(t)4t]− va(t)
4t. (93)
Observe, que esta expressao contem vetores nos pontos diferentes de S. Vamos discobrir significado de vetor queapareceu no interior de parenteses retas. Considere o problema de construir campo paralelo ωa(t) a partir de umvetor va(t+4t) dado no ponto ξb(t+4t). Temos o problema:
Dωa =dωa
dt+ Γabcξ
bωc = 0, ωa(t+4t) = va(t+4t). (94)
De acordo com analise matematica, podemos trocar derivada na equacao (94) por expressao ωa(t+4t)−ω(t)4t + O(4t),
onde O(4t) 4t→0−→ 0. Usando condicao inicial, o problema fica: ωa(t) = va(t +4t) + Γabcξbωc(t)4t + O(4t)4t. Na
aproximacao 4t, solucao desta equacao e (confirme!)
ωa(t) = va(t+4t) + Γabcξbvc(t)4t+O(4t)4t. (95)
ωa(t) e resultado de transporte paralelo de vetor va(t+4t) no ponto t. Comparando (95) com (93), a ultima equacaopodemos escrever em termos de vetores que ficam no mesmo ponto de S
Dva = lim4t→0
ωa(t)− va(t)
4t. (96)
Portanto derivada covariante tem seguinte interpretacao: calculando dela, nos fazemos transporte paralelo de vetorva(t+4t) no ponto t, e comparamos dele com vetor va(t) dado neste ponto.
Escrevendo equacao (96) em forma
ωa(t) = va(t) +Dva(t)4t+O2(4t), (97)
temos expressao aproximada para resultado do transporte paralelo de vetor va(t+4t) no ponto t em termos de vetorva(t) do campo neste ponto.Exercıcio 17.1. Encontre sımbolos de Christoffel de esfera em coordenadas conformes (83).

IV Derivada covariante em coordenadas locais, siımbolos de Christoffel, SFF 31
2. Conexao em termos de metrica. Vamos discutir a equacao (88), que determina taxa de variacao de vetoresr′a na direcao de curvas coordenadas ξb.
Lembrem-se, que (r′a, r′b) = gab, (r′a,n) = 0, e matriz inversa de gab vamos anotar gab: gacgcb = δab. Calculando
produto escalar de (88) com r′a, obtemos
Γcab = gcd(∂dr, ∂a∂br), (98)
E impressionante que conexao podemos apresentar totalmente em termos de metrica e derivadas dela
Γcab =1
2gcd(∂agdb + ∂bgad − ∂dgab). (99)
Exercıcio 17.2. Confirme a igualdade calculando a parte direta.Exercıcio 17.3. Confirme a igualdade (∂ar∂bn) = (∂br, ∂an).
Componentes de matriz simetrica Nab sao chamados coeficientes de segunda forma fundamental de superfıcie emsistema ξc. Dado vetor tangente com coordenadas va, eles determinam a forma quadratica
Nabvavb, (100)
chamada segunda forma fundamental de superfıcie.Para uso posterior, vamos apresentar varias expressoes para segunda forma fundamental, e para coordenadas de
derivada de vetor normal a superfıcie. Calculando produto escalar de (88) com n e usando exercıcio 17.2, obtemos
Nab = (∂a∂br,n) = −(∂ar, ∂bn) = −(∂br, ∂an) =
−1
2[(∂ar, ∂bn) + (∂br, ∂an)]. (101)
Vamos encontrar coordenadas dos vetores ∂an. Como (n,n) = 1, temos (∂an,n) = 0, portanto vetores ∂an ficamno plano tangente a S, e podem ser escritos na base: ∂an = r′bb
ba. Calculando produto escalar com r′c, obtemos
coordenadas de ∂an em termos de segunda forma fundamental
∂an = −r′bgbcNca, ou bba = −gbcNca. (102)
3. Regras de transformacao. Usando um sistema de coordenadas ξa e parametrizacao de S: r = x(ξa), podemoscalcular Nab, ba
b e Γcab. Usando outro sistema ξ′β = ξ′β(ξa), vamos ter a parametrizacao r = y(ξ′b), e podemoscalcular N ′αβ , b′α
β e Γ′δβγ . Vamos encontrar relacao entre eles. De igualdade x(ξa) = y(ξ′b(ξa)) temos
∂ax(ξa) =∂ξ′α
∂ξa∂′αy(ξ′β)
∣∣ξ′(ξ)
,
∂b∂ax(ξa) =∂ξ′α
∂ξa∂ξ′β
∂ξb∂′β∂
′αy∣∣ξ′(ξ)
+∂2ξ′α
∂ξa∂ξb∂′αy|ξ′(ξ) . (103)
Nas formulas abaixo vamos omitir a substituicao de ξ′(ξ). Usando estas regras, temos Nab = (∂a∂bx,n) =∂ξ′α
∂ξa∂ξ′β∂ξb
(∂′α∂′βy,n)+ ∂2ξ′α
∂ξa∂ξb(∂′αy,n) = ∂ξ′α
∂ξa∂ξ′β
∂ξbN ′αβ+0. Levando em conta esta formula e a regra de transformacao de
metrica inversa (56): gab = ∂ξa
∂ξ′α∂ξb
∂ξ′βg′αβ , obtemos ba
b = −Nacgcb = −∂ξ′α
∂ξa N′αγ
∂ξ′γ
∂ξc∂ξc
∂ξ′δg′δβ ∂ξb
∂ξ′β= −∂ξ
′α
∂ξa∂ξb
∂ξ′βN ′αδg
′δβ =∂ξ′α
∂ξa∂ξb
∂ξ′βb′αβ . No calculo foi usada a propriedade ∂ξ′γ
∂ξc∂ξc
∂ξ′δ= δγδ, veja Eq. (47). O calculo para conexao e parecido:
Γcab = gcd(∂dx, ∂a∂bx) =∂ξc
∂ξ′γg′γσ
∂ξd
∂ξ′σ
(∂ξ′ρ
∂ξd∂′ρy,
∂ξ′α
∂ξa∂ξ′β
∂ξb∂′β∂
′αy +
∂2ξ′α
∂ξa∂ξb∂′αy
)=
∂ξc
∂ξ′γg′γσ(∂′σy, ∂′α∂
′βy)
∂ξ′α
∂ξa∂ξ′β
∂ξb+∂ξc
∂ξ′γg′γσ(∂′σy, ∂′αy)
∂2ξ′α
∂ξa∂ξb=
∂ξc
∂ξ′γΓ′γαβ
∂ξ′α
∂ξa∂ξ′β
∂ξb+
∂ξc
∂ξ′α∂2ξ′α
∂ξa∂ξb. (104)
Entao as regras de transformacao sao:
Nab =∂ξ′α
∂ξa∂ξ′β
∂ξbN ′αβ , (105)

IV Derivada covariante em coordenadas locais, siımbolos de Christoffel, SFF 32
bba =∂ξ′α
∂ξa∂ξb
∂ξ′βb′βα, (106)
Γcab =∂ξc
∂ξ′γ∂ξ′α
∂ξa∂ξ′β
∂ξbΓ′γαβ +
∂ξc
∂ξ′α∂2ξ′α
∂ξa∂ξb. (107)
Regra de transformacao de Nab e a mesma como para a metrica gab. Observe que, no contrario com conexao, ostensores gab, g
ab, Nab e bab tem regra de transformacao ”homogenea”, por exemplo: N ∼ N ′. Observe tambem, queposicao de ındex de um tensor (em cima ou embaixo), determina a regra de transframacao deste ındex: um ındex que
fica ”em cima” se transforma por meio de matriz ∂ξ∂ξ′ , enquanto um ındex ”embaixo” se transforma por meio de matriz
inversa: ∂ξ′
∂ξ . Portanto, fazendo os calculos em geometria diferencial, e importante manter a posicao dos indexes.
4. Funcoes escalares. Por definicao, funcao escalar sobre S e uma regra, que com cado ponto de S associa umnumero. Ou seja, f e aplicacao f : S → R, r→ f(r). Em coordenadas locais, dada funcao escalar vai ser representadapor uma funcao R2 → R. Em sistema ξa ela e apresentada por funcao φ(ξa) ≡ f(x(ξa)). Escolhendo outro sistema:ξ′α = ξ′α(ξa), vamos apresentar dela por funcao φ′(ξ′α) ≡ f(y(ξ′α)). Por construcao, temos relacao entre as duasfuncoes
φ(ξa) = φ′(ξ′α(ξa)), ou, simbolicamente φ = φ′, (108)
chamada regra de transformacao de funcao escalar.Os tensores gab, g
ab, Nab e bab podem ser usados para construir duas funcoes escalares importantes.Def. Curvatura de Gauss de supefıcie e funcao escalar
K =detNabdet gcd
≡ det(g−1N). (109)
Curvatura media de superfıcie e funcao escalar
H =1
2gabNab ≡
1
2trace (g−1N). (110)
Exercıcio 17.4. Mostre que K e H realmente sao funcoes escalares (por exemplo: K = K ′).Exercıcio 17.5. Observe que tr ba
b ≡ baa e det ba
b sao funcoes escalares. Encontre expressoes para estas funcoes emtermos de K e H.Exercıcio 17.6. Observe que K = H = 0 para um plano, e K = 0, H 6= 0 para um cilindro.Exercıcio 17.7. Observe que segunda forma fundamental (100) e funcao escalar
Nabvavb = N ′abv
′av′b. (111)
5. Definicao invariante de segunda forma fundamental. Por construcao, a primeira forma fundamental:g(V) = (V,V) = (V 1)2 + (V 2)2 + (V 3)2 nao depende de sistema de coordenadas (ou seja, e invariante), enquantoa segunda forma fundamental (100) foi definida usando um sistema de coordenadas. Embora nos mostramos ainvariancia de SFF, veja (111), seria importante de ter uma definicao invariante. Dado vetor V ∈ Tr(S), considere aaplicacao invariante10
N : Tr(S)→ R; N(V) = (r′′(t),n), (112)
onde r(t) e uma curva parametrizada tal, que r′(t) = V no ponto r.
Vamos analisar N em coordenadas locais ξa, onde V = r′ava, e ξa(t) - uma curva com dξa
dt = va. N(V) coincide
com SFF: N(V) = (r′′(ξa(t)),n) = ( ddt (r′adξa
dt ),n) = (r′′abdξa
dtdξb
dt ,n) + (r′ad2ξa
dt2 ,n) = (r′′ab,n)vavb + 0 = Nabvavb. Isto
mostra tambem com clareza, que N(V) nao depende de escolha das curvas r(t) e ξa(t).Resumindo, a aplicacao invariante (112) e segunda forma fundamental de S.
10 Lembrem-se, que a definicao (51) de campo de vetores normais a superfıcie e invariante, se vamos nos restringir ao sistemas de coordenadascom det aab > 0, veja fim do Paragrafo III A.

IV Curva geodesica 33
C. Curva geodesica.
Neste e seguinte paragrafos, vamos discutir uma curva sobre superfıcie que tem propriedades de reta do planoEuclideano.
No espaco Euclideano, as retas tangentes a curva geralmente nao sao paralelas. Elas sao paralelas somente se acurva e uma reta. Vamos discutir curvas sobre superfıcie quais tem a mesma propriedade. No lugar de reta tangentepodemos considerar vetores tangentes a curva, ja que todos eles ficam sobre a reta tangente. Vamos escolher paradiscussao o vetor tangente unitario: V(r0) = V0, |V0| = 1.Def. Curva γ ⊂ S e geodesica, se vetor tangente V0 permanece tangente no processo de transporte paralelo dele aolongo de γ.
Observe que definicao de geodesica nao menciona parametrizacao dela. Portanto podemos procurar a geodesicausando qualquer uma parametrizacao.
Seja V0 e vetor tangente unitario num ponto de geodesica, e V(t) e campo paralelo construıdo a partir de V0.De acordo com a definicao, o campo paralelo V(t) vai ser proporcional do campo tangente r′(t) de geodesica nocado ponto. Entao temos a condicao para γ = Im r(t) ser geodesica: α(t)V(t) = r′(t). Como |V(t)| = 1, temos
|α(t)| = |r′(t)|, portanto campo paralelo pode ser apresentado em termos de vetor tangente a geodesica: V = r′
|r′| .
Entao a condicao para uma curva ser geodesica e (supomos que V0 foi escolhido na direcao r′(0), entao α e funcaopositiva)
α(t)V(t) = r′(t), ou V =r′
|r′|. (113)
Substituindo o vetor V desta forma na equacao de transporte paralelo DV(t) = 0, obtemos equacao de geodesica
Dr′
|r′|= 0. (114)
Em coordenadas locais temos r′
|r′| = r′aξa
|ξ| , pois |r′| =
√gabξaξb ≡ |ξ|. De acordo com paragrafo anterior, equacao
(114) implica seguinte equacao de geodesica em coordenadas locais
Dξa
|ξ|= 0, ou
d
dt
(ξa
|ξ|
)+
1
|ξ|Γabcξ
bξc = 0, onde |ξ| =√gabξaξb. (115)
Observe que por construcao, as coordenadas de campo paralelo sao va = 1|ξ| ξ
a (vetor tangente ξa geralmente nao
representa as coordenadas de campo paralelo!). Observe tambem que ξa(t) nao e geodesica, mas representante delano plano de coordenadas. Com certo abuso de terminologia, nos vamos chamar a curva Im ξa(t) = σ ⊂ R2 geodesica,
e 1|ξ| ξ
a o campo paralelo.
Equacao de geodesica em parametrizacao natural r(s). Neste caso a equacao de geodesica se simplifica.Realmente, temos |r′(s)| = 1 junto com |V(s)| = 1, portanto a condicao (113) fica V(s) = r′(s), ou seja α(s) = 1 paratodo s, e campo paralelo coincide com o campo tangente a curva. Temos no lugar de (114) a equacao de geodesica
Dr′(s) = 0, (116)
Exemplo 18.1. Se γ ⊂ S e uma reta, entao ela e geodesica. Realmente, vamos escrever equacao dela: r(s) = r0 + Vs,com vetor-diretor constante unitario V. Entao s e parametro natural. O campo V e tangente a reta e representacampo paralelo: DV = dV
ds
∣∣S
= 0|S = 0. Entao r(s) e geodesica.
Exercıcio 18.1. Da equacao (116) observe: se γ - geodesica, entao plano osculador dela e ortogonal ao plano tangentede S no cado ponto, onde curvatura de curva nao e nula: |r′′(s)| 6= 0.
Equacao (116) em coordenadas locais se escreva
ξa + Γabcξbξc = 0. (117)
O sistema tem forma normal, portanto existe unica solucao dela sob condicoes iniciais
ξa(0) = ξa0 , ξa(0) = va0 , (118)
com |va0 | =√gabvavb = 1, entao |V(0)| = 1. Campo tangente V(s) = dr
ds = r′a(s)ξa(s) a curva resultante r(s) =
r′aξa(s) e campo paralelo gerado por vetor unitario. Portanto v(s) vai ser unitario tambem : |V(s)| = 1. Portanto
solucao r(s) automaticamente vai representar geodesica em parametrizacao natural. Resumindo, temos

IV Curva geodesica 34
Af. 18.1. Pelo cado ponto r ⊂ S na direcao de dado vetor V passa unica geodesica.Exercıcio 18.2. Encontre exemplos de geodesicas sobre cilindro e cone.Exercıcio 18.3. Confirme, que somente circunferencias de maior raio de esfera sao geodesicas dela.Equacao de geodesica em parametrizacao arbitraria. No contrario com (117), a equacao (115) de geodesicaem parametrizacao arbitraria tem infinitas solucoes para dadas condicoes iniciais (118). Todas estas solucoes saoparametrizacoes da mesma curva geodesica. Vamos discutir este assunto com detales. Primeiro, escrevemos a equacao(115) em varias formas equivalentes.Exercıcio 18.2 Mostre, que equacao (115) pode ser escrita como
ξa + Γabcξbξc − (ln |ξ|) ξa = 0. (119)
Vamos calcular derivada que apareceu no ultimo termo de (119): |ξ|−2[gbcξ
bξc + 12 ξb∂bgnk ξ
nξk]
=
|ξ|−2gbcξb[ξc + 1
2gcp∂pgnk ξ
nξk]≡ |ξ|−2gbcξ
b[ξc + Γcnk ξ
nξk]
= |ξ|−2gbcξbDξc. Substituindo o resultado na equacao
anterior, escrevemos dela em forma (δac −
ξaξbgbc
gnmξnξm
)Dξc ≡ P acDξc = 0, (120)
onde a matriz simetrica
P ac = δac −ξaξbgbc
gnmξnξm, (121)
obedece das propriedades
P acξc = 0, (122)
P abPbc = P ac. (123)
Equacao (122) significa que ξc e vetor nulo de matriz P , isto implica detP = 0. Como P nao e invertivel, o sistema(120) para determinar geodesica nao tem forma normal, e teorema anterior sobre existencia de solucao unica nao valepara (120).
Considere o sistema
ξa + Γabcξbξc − (lnα)·ξa = 0, (compare dele com (119)) (124)
ou, equivalente
d
dt
(ξa
α
)+
1
αΓabcξ
bξc = 0, (compare dele com (115)) (125)
para incognitos ξ1(t), ξ2(t) e α(t). Sistemas (124) e (120) sao equivalentes no seguinte sentido:
(a) Seja ξa(t) - uma solucao de (120), entao as funcoes ξa(t) e α(t) = |ξ| representam solucao de (124), - veja (119).(Realmente, (124) com este α(t) coincide com (119) ∼ (120).)(b) Seja ξa(t) e α(t)- uma solucao de (125). Entao ξa(t) representa solucao de (120). (Realmente, de (124), ξa(t)
obedece Dξa = αξa, portanto satisfaz (120): PDξa = αP ξa = 0.)Entao podemos usar a equacao (125) para analisar as geodesicas.Dada funcao α1(t), sistema (125) tem unica solucao, digamos ξa1 (t) para as condicoes iniciais (118). Escolhendo
uma outra funcao α2(t), para as mesmas condicoes iniciais obtemos unica solucao ξa2 (t). Vamos mostrar, que ξa1 (t) eξa2 (t) sao duas parametrizacoes da mesma geodesica: Im ξa1 (t) = Im ξa2 (t).Lema. Seja o par de funcoes ξa(t), α(t) e solucao de problema (125), (118), e β(t) uma dada funcao. Entao existeparametrizacao ηa(τ) de geodesica γ = Im ξa(t) tal, que par de funcoes ηa(τ) e β(τ) tambem e solucao de (125),(118):
d
dt
(ηa
β
)+
1
βΓabcη
bηc = 0, ηa(0) = ξa0 , ηa(0) = va0 . (126)

IV Curva geodesica 35
(0)
(t)
(0)
(1)
(1)
(t) =
(t)
+ (t)
FIG. 20: Formulacao de problema variacional
Dem. Determine funcao ψ a partir de equacao ψ′(τ) = β(τ)
α(α(0)β(0)
ψ(τ)), com condicao inicial ψ(0) = 0. Considerando
ϕ(τ) = α(0)β(0)ψ(τ) como funcao de passagem de troca de variaveis t = ϕ(τ), construa curva parametrizada ηa(τ)
def==
ξa(ϕ(τ)). Observe, que
1
β(τ)
dηa(τ)
dτ=
1
β(τ)
dξa(t)
dt
∣∣∣∣ϕ(τ)
α(0)β(τ)
β(0)α(α(0)β(0)ψ(τ)
) =
(α(0)
β(0)α(t)
dξa(t)
dt
)∣∣∣∣ϕ(τ)
. (127)
Exercıcio 18.3. Por meio de calculo direto, confirme que ηa(τ)def== ξa(ϕ(τ)) obedece as condicoes iniciais (118).
Exercıcio 18.4. Substituindo (127) na Eq. (126), confirme que a ultima se transforma em (125).Af. 18.2. Seja os pares (ξa1 , α1) e (ξa2 , α2) sao solucoes de problema (125), (118). Entao as curvas parametrizadasξa1 (t) e ξa2 (t) determinam a mesma geodesica.Dem. Aplicando Lema para funcoes ξa1 , α1 e α2, construa a curva ηa = ξa1 ϕ. Ela representa uma parametrizacaode geodesica γ = Im ξa1 . No mesmo tempo, as curvas ηa e ξa2 obedecem o sistema (125), (118) com α = α2. Comosolucao deste problema com dada α2 e unica, eles coincidem: ξa2 = ηa. Entao ξa1 e ξa2 sao duas parametrizacoes damesma geodesica.
Resumindo, equacao de geodesica (115) em parametrizacao arbitraria tem infinitos solucoes para dadas condicoesiniciais (118). As solucoes representam parametrizacoes diferentes de curva geodesica.
D. Distancia entre pontos de superfıcie. Elementos de analise variacional.
Exercıcio 19.1. Dados dois pontos r1 e r2, seja x(t) e uma parametrizacao de curva que passa pelo estes pontos,x(a) = r1, x(b) = r2. Encontre parametrizacao y(t′) desta curva com propriedades y(0) = r1 e y(1) = r2.
Para calcular distancia entre dois pontos r1 e r2 de superfıcie, entre todas as curvas que ligam estes pontos vamosbuscar aquela que tem menor comprimento. Ela e chamada curva minimizante. Por definicao, distancia entre os pontose comprimento de curva minimizante. Trabalhando em sistema de coordenadas ξa, vamos escolher parametrizacaor(ξa(t)) de curvas tal, que r(ξa(0)) = r1 e r(ξa(1)) = r2. O comprimento de uma curva r(ξa(t)) e dado pelo integral
l[ξ] =
∫ 1
0
√gab
dξa
dt
dξb
dtdt, (128)
calculado para representante ξa(t) de curva.Entao, precisamos encontrar a curva ξa(t) ⊂ R2 que implica valor mınimo de integral (128). Observe, que conjunto
l[ξ] e composto de numeros nao negativos, portanto tem infimo. Problemas deste tipo resolva analise variacional.Vamos apresentar este formalismo em forma, adaptada para o nosso caso. A resposta final, que nos vamos encontrar,e que curva minimizante coincide com geodesica que passa pelo os pontos r1 e r2.
Considere conjunto de funcoes (curvas) F = ξa(t) : [0, 1] ⊂ R→ R2, ξa(0) = ξa0 , ξa(1) = ξa1 que ligam dois pontos
ξa0 e ξa1 de R2, veja Figura 20. Funcional I[ξa] e aplicacao I : F → R, ou seja, uma regra que com cada funcao deconjunto F associa um numero. Comprimento de arco (128) e um exemplo de funcional. Para discutir o mınimo defuncional, vamos precisar nocao de variacao de funcional (analogo de diferencial de funcao).

IV Distancia entre pontos de superfıcie. Elementos de analise variacional 36
Construcao. Dados funcoes ξa e ηa, construa a funcao δξadef== ηa − ξa, entao podemos escrever ηa = ξa + δξa. A
funcao δξa e chamada variacao de ξa. Por construcao, variacao nos pontos limites e nula: δξa(0) = δξa(1) = 0.Construa familia uniparametrica de curvas seguinte: ξa(t, λ) = ξa(t) + λδξa(t), λ ∈ [0, 1]. Essa familia e subconjuntoFλ ⊂ F que ”connecta” as curvas inicialmente escolhidas: ξa(t, 0) = ξa(t), ξa(t, 1) = ηa(t). Funcional I[ξa] pode serusado agora para construir a funcao
I : Rλ → R; λ→ I(λ)def== I[ξa(t, λ)]. (129)
Valor de funcao I(λ) para cado λ coincide com valor de funcional para membro de familia Fλ, com este λ.Def. Dada variacao δξa(t), variacao δI[ξa(t)] de funcional11 no ponto ξa(t) e
δI[ξa(t)] ≡ dI(λ)
dλ
∣∣∣∣λ=0
=d
dλI[ξa(t) + λδξa(t)]
∣∣∣∣λ=0
. (130)
Af. 19.1 Se ξa(t) representa mınimo de funcional, entao δI[ξa(t)] = 0 para todo δξa(t).Realmemte, seja ξa(t) representa mınimo de funcional: I[ξa(t)] ≤ I[ηa(t)] para todo ηa(t). Para uma variacao
δξa(t), isto implica I[ξa(t)] ≤ I[ξa(t)+λδξa(t)] para todo λ. Esvrevendo esta desigualdade em termos de funcao I(λ):
I(0) ≤ I(λ), concluirmos que λ = 0 e extremum de I(λ), portanto dI(λ)dλ
∣∣∣λ=0
= 0. De acordo com (130), isto equivale
δI[ξa(t)] = 0. Como δξa(t) foi escolhido arbitrariamente, a afirmacao esta mostrada.Entao curva minimizante do nosso funcional (128) podemos procurar entre solucoes de equacao δl[ξa] = 0. Vamos
encontrar forma explıcita dela. Usando notacoes dξa
dt = ξa,
√gabξaξb =
√, temos
δl[ξa] =d
dλ
∫dt
√gab(ξc + λδξc)[ξa + λ(δξa)·][ξb + λ(δξb)·]
∣∣∣∣λ=0
=∫dt
1
2√[2gacξ
a d
dtδξc + ∂cgabξ
aξbδξc]
=∫dt
[−gkc
d
dt
(ξk√
)− gac
ξa√ +
1
2√ ∂cgabξ
aξb
]δξc + 0 =
−∫dt
[gkc
d
dt
(ξk√
)+ gckg
kn 1√ ∂bganξ
aξb − 1
2√ gckg
kn∂ngabξaξb
]δξc =
−∫dt
[d
dt
(ξk√
)+
1
2√ gkn (∂agnb + ∂bgan − ∂ngab) ξaξb
]gckδξ
c =
−∫dt
[d
dt
(ξk√
)+
1√ Γkabξ
aξb
]gckδξ
c. (131)
No passagem de segunda para terceira linha nos calculamos integral por partes, levando em conta δξa(t)|10 = 0. Comointegral na ultima linha deve ser nula para todo δξa(t), chegamos na equacao de segunda ordem que determina curvaminimizante ξa(t) em parametrizacao arbitraria
d
dt
ξk√gmnξmξn
+1√
gmnξmξnΓkabξ
aξb = 0. (132)
Ela coincide com Eq. (115), ou seja, curva minimizante coincide com a curva geodesica. Em parametrizacao natural
temos
√gabξaξb = 1, e (132) coincide com (117):
ξk + Γkabξaξb = 0. (133)
Resumindo, geodesica e curva minimizante entre dois pontos de superfıcie.
11 Observe, que λ = 0 e fronteira de domınio de funcao I(λ). Portanto λ = 0 nao pode ser um ponto de reflexao.
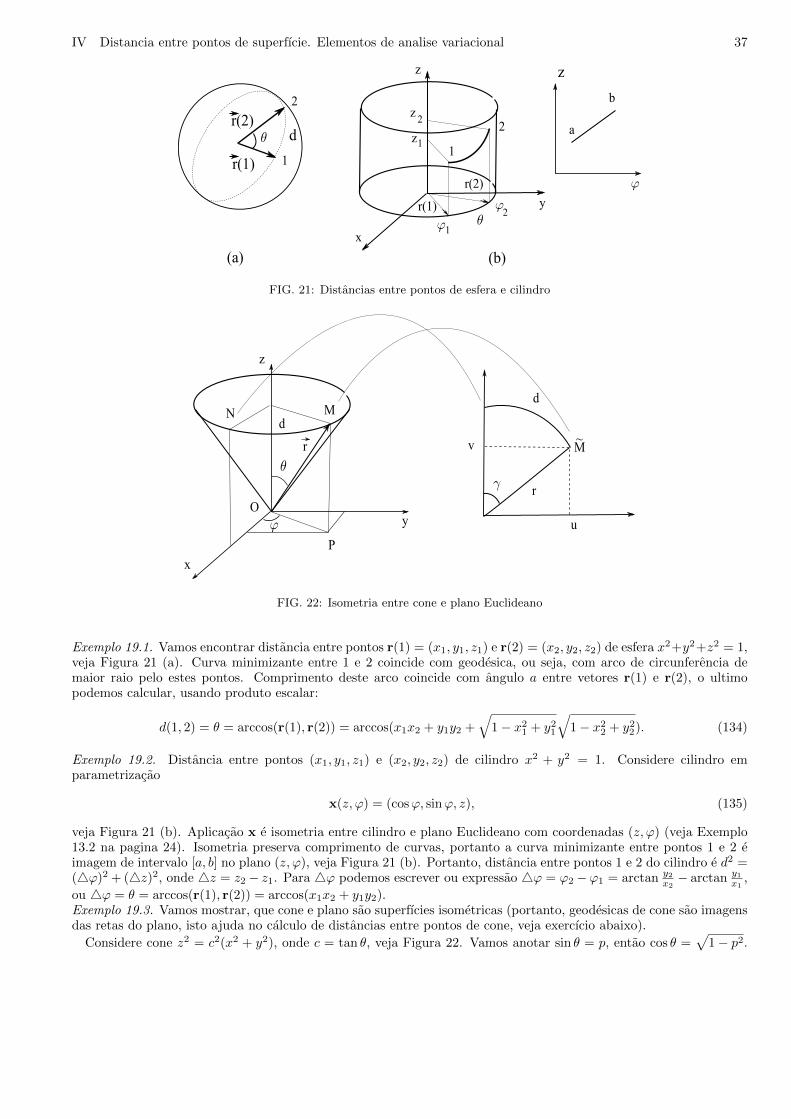
IV Distancia entre pontos de superfıcie. Elementos de analise variacional 37
1
2
1
2
d
r(1)
r(2)
(a)
1
2
x
y
z
z
z
1
2
z
r(1)
r(2)
a
b
(b)
FIG. 21: Distancias entre pontos de esfera e cilindro
P
MN
O
x
y
z
r
u
v
d
d
r
M~
FIG. 22: Isometria entre cone e plano Euclideano
Exemplo 19.1. Vamos encontrar distancia entre pontos r(1) = (x1, y1, z1) e r(2) = (x2, y2, z2) de esfera x2+y2+z2 = 1,veja Figura 21 (a). Curva minimizante entre 1 e 2 coincide com geodesica, ou seja, com arco de circunferencia demaior raio pelo estes pontos. Comprimento deste arco coincide com angulo a entre vetores r(1) e r(2), o ultimopodemos calcular, usando produto escalar:
d(1, 2) = θ = arccos(r(1), r(2)) = arccos(x1x2 + y1y2 +√
1− x21 + y2
1
√1− x2
2 + y22). (134)
Exemplo 19.2. Distancia entre pontos (x1, y1, z1) e (x2, y2, z2) de cilindro x2 + y2 = 1. Considere cilindro emparametrizacao
x(z, ϕ) = (cosϕ, sinϕ, z), (135)
veja Figura 21 (b). Aplicacao x e isometria entre cilindro e plano Euclideano com coordenadas (z, ϕ) (veja Exemplo13.2 na pagina 24). Isometria preserva comprimento de curvas, portanto a curva minimizante entre pontos 1 e 2 eimagem de intervalo [a, b] no plano (z, ϕ), veja Figura 21 (b). Portanto, distancia entre pontos 1 e 2 do cilindro e d2 =(4ϕ)2 + (4z)2, onde 4z = z2 − z1. Para 4ϕ podemos escrever ou expressao 4ϕ = ϕ2 −ϕ1 = arctan y2
x2− arctan y1
x1,
ou 4ϕ = θ = arccos(r(1), r(2)) = arccos(x1x2 + y1y2).Exemplo 19.3. Vamos mostrar, que cone e plano sao superfıcies isometricas (portanto, geodesicas de cone sao imagensdas retas do plano, isto ajuda no calculo de distancias entre pontos de cone, veja exercıcio abaixo).
Considere cone z2 = c2(x2 + y2), onde c = tan θ, veja Figura 22. Vamos anotar sin θ = p, entao cos θ =√
1− p2.

IV Tensor de curvatura e curvatura de Gauss de superfıcie 38
Vamos comecar com parametrizacao de cone por meio de variaveis r e ϕ de sistema de coordenadas esfericas:
x(r, θ) = (pr cosϕ, pr sinϕ,√
1− p2r). (136)
Agora vamos definir coordenadas (u, v) de acordo com seguinte regra: seja r e vetor de posicao de ponto M de cone,e d e comprimento de arco NM de circunferencia, veja Figura 22. No plano (u, v) vamos tracar arco de circunferencia
de raio r e de comprimento d. Entao ponto final M deste arco e representante12 de M em coordenadas (u, v). Vamosreescrever (136) em cordenadas (u, v). Precisamos expressoes para funcoes r(u, v) e ϕ(u, v). Para r(u, v) temos:
r =√u2 + v2. Para encontrar ϕ(u, v), observe duas expressoes para d: d = ϕ|OP | = ϕrp e d = rγ = r arctan u
v .
Igualando delas, obtemos ϕ = 1p arctan u
v . Substituindo na expressao (136), obtemos parametrizacao de cone
x(u, v) = (p√u2 + v2 cos(
1
parctan
u
v), p
√u2 + v2 sin(
1
parctan
u
v),√
1− p2√u2 + v2). (137)
Vamos mostrar, que aplicacao x e isometria entre plano Euclideano e cone. Usando identidade
d(
arctanu
v
)=vdu− udvu2 + v2
, (138)
obtemos para diferenciais:
dx =
(1√
u2 + v2[p(udu+ vdv) cosϕ− (vdu− udv) sinϕ] ,
1√u2 + v2
[p(udu+ vdv) sinϕ− (vdu− udv) cosϕ] ,
√1− p2
√u2 + v2
(udu+ vdv)
). (139)
Daqui, calculo direto nos da metrica do cone
(dx, dx) = du2 + dv2. (140)
Como ela coincide com metrica do plano Euclideano, as superfıcies sao isometricas.Exercıcio 19.2. Encontre distancia entre dois pontos do cone com mesma cordenada z (por exemplo, entre N e M naFigura 22). Compare resultado com numero d.
E. Tensor de curvatura e curvatura de Gauss de superfıcie.
Derivadas repetidas na direcao de eixos coordenadas de um campo vetorial V(x1, x2, x3) no espaco Euclideano saocomutativas: ∂i∂jV−∂j∂iV = 0. Vamos testar, se as derivadas covariantes tem mesma propriedade. Como resultadodesta analise vamos encontrar uma caracterıstica fundamental de superfıcie chamada curvatura de Gauss.
Seja V(r) = r′c(ξb)vc(ξb) - campo tangente a S. Vamos calcular derivadas covariantes dele na direcao das curcas
coordenadas, ou seja, na Eq. (89) vamos pegar ddt = ∂
∂ξ1 ou ∂∂ξ2 . Estas derivadas vamos anotar D1 e D2 (veja tambem
(91)). Temos
DbV = r′cDbvc, Dbv
c = ∂bvc + Γcbnv
n. (141)
Derivada Da de vetores W1 = D1V e W2 = D2V e Da(DbV) = r′cDa[Dbvc] = r′c(∂a[∂bv
c + Γcbnvn] + Γcan[∂bv
n +Γnbmv
m]) = r′c(∂a∂bvc + ∂aΓcbnv
n + Γcbn∂avn + Γcan∂bv
n + ΓcanΓnbmvm). No calculo de comutador de derivadas, os
termos que contem derivadas de va se cancelam por razoes de simetria. Os termos restantes vamos escrever em forma
(DaDb −DbDa)V = r′cRcmabv
m, (142)
onde
Rcmab(ξk) = ∂aΓcbm + ΓcanΓnbm − (a↔ b), (143)
12 Observe, que aplicacao M → M preserva comprimentos das curvas OM e NM e angulo entre eles. Portanto, temos esperanca que estaaplicacao e uma isometria. Intuitivamente, estamos desenrolando cone, transformando dele numa regiao planar.

IV Tensor de curvatura e curvatura de Gauss de superfıcie 39
e chamado tensor de curvatura (ou tensor de Rieman) de suprfıcie em coordenadas locais ξa. Ele e conjunto de24 = 16 funcoes de ξk construıdas das componentes de metrica e derivadas dela. De acordo com (143), comutadordas derivadas covariantes (com a 6= b) na direcao de curvas coordenadas geralmente nao e nulo, mas e proporcionalde tensor de curvatura.
Vai ser util introduzir a notacao especial para tensor de curvatura com todos indexes colocados embaixo com usode metrica gnc
Rnmab ≡ gncRcmab = gnc[∂aΓcbm + ΓcakΓkbm − (a↔ b)]. (144)
Usando identidade: ∂agnc ≡ Γnac+Γcan, podemos escrever primeiro termo como se segue: gnc∂aΓcbm = ∂a(gncΓcbm)−
∂agncΓcbm = ∂aΓnmb−(Γnac+Γcan)Γcbm. Substituindo na equacao (144), obtemos a expressao equivalente (Exercıcio)
Rnmab = ∂aΓnmb + ΓcnbΓcma − (a↔ b)]. (145)
Vamos apresentar algumas propriedades de tensor de curvatura, quais podem ser verificadas por meio de calculodireto.1. Propriedades de simetria (observe, que antisimetria em relacao de indices a e b e evidente a partir da definicao(143))
Rnmab = Rabnm, Rnmab = −Rmnab, Rnmab = −Rnmba. (146)
2. Regra de transformacao no passagem ξa(ξ′β) de um sistema para outro
R′αβγσ =∂ξa
∂ξ′α∂ξb
∂ξ′β∂ξc
∂ξ′γ∂ξd
∂ξ′σRabcd. (147)
Contracoes de tensor de curvatura com metrica inversa gab tem nomes proprios. Tensor de Ricci Rmb e regra detransformacao dele
Rmb ≡ gnaRmnab, R′αβ =∂ξa
∂ξ′α∂ξb
∂ξ′βRab. (148)
Curvatura escalar R e funcao escalar seguinte
R ≡ gmbRmb = gmbgnaRmnab, R′(ξ′c) = R(ξc). (149)
Equacao (147) tem duas consequencias evidentes, mas importantes:Af. 20.1. Se em uma regiao de S temos: Rnmab = 0 em um sistema de coordenadas, entao ele e nulo em qualqueroutro (e se ele nao e nulo identicamente em um sistema, o mesmo acontece em qualquer outro sistema).Af. 20.2. Tensor de curvatura de um plano e nulo.
A segunda afirmacao segue de fato, que no plano podemos escolher coordenadas (globais) com gab = δab. Istoimplica Γabc = 0, entao Rnmab = 0 neste sistema, e de acordo com afirmacao anterior, Rnmab = 0 em qualquer outrosistema.
Lembramos que dada superfıcie com metrica gab(ξc) em coordenadas ξc, podemos buscar as coordenadas nas quais
a metrica tem forma Euclideana:
∂ξa
∂ξ′α
∣∣∣∣ξ′(ξ)
∂ξb
∂ξ′β
∣∣∣∣ξ′(ξ)
gab(ξ) = δαβ . (150)
Como foi discutido no Paragrafo 2.6, nao e facil predizer existencia de tais coordenadas a partir desta equacao.Conhecimento de tensor de curvatura permita fazer tal conclusao imediatamente:Af. 20.3. Seguintes afirmacoes sao equivalentes:(a) Em S (ou em O(r) ⊂ S) existem as coordenadas com gab(ξ
c) = δab;(b) Na mesma vizinhanca, Rcmab = 0 em coordenadas arbitrarias.Dem. (a) → (b). Se gab(ξ
c) = δab, temos Γ ∼ ∂Γ = 0 e R ∼ ∂Γ + ΓΓ = 0 neste sistema. Entao, de acordo comAfirmacao 20.1, R = 0 em qualquer outro sistema de coordenadas.(b) → (a). Seja gab(ξ
c) representa metrica em coordenadas iniciais ξc. Para as coordenadas novas, vai ser util usar
notacoes ξa′
no lugar de ξ′a. Entao, index a′ e independente de a.Como vimos no fim do paragrafo III F, sem perda de generalidade podemos admitir, que no ponto ξa0 temos
gab(ξa0 ) = δab. (151)

IV Tensor de curvatura e curvatura de Gauss de superfıcie 40
Estamos procurando um difeomorfismo ξa′(ξb), que obedece a equacao (150) numa visinhanca deste ponto, ou, equiv-
alente,
∂ξa′(ξ)
∂ξa∂ξb
′(ξ)
∂ξbδa′b′ = gab(ξ). (152)
Considere primeiro o problema auxiliar seguinte13
∂c∂aξk′ = Γkca∂kξ
k′ , (153)
com condicoes iniciais
∂cξk′(ξ0) = δc
k′ . (154)
Dados Γkca(ξc), este sistema nem sempre tem solucoes, ou seja, equacoes (153) implicam certas condicoes de com-
patibilidade. Realmente, se (153) esta satisfeita, entao ∂n∂c∂aξk′ = ∂n(Γkca∂kξ
k′) e ∂c∂n∂aξk′ = ∂c(Γ
kna∂kξ
k′). Adiferenca deles implica
0 = ∂n(Γkca∂kξk′)− (n↔ c) =
(∂nΓpca + ΓkcaΓpnk − (n↔ c)
)∂pξ
k′ = Rpanc∂pξk′ . (155)
Portanto ξk′(ξc) pode obedecer (153) somente se
Rpanc∂pξk′ = 0. (156)
Em particular, esta equacao com certeza vai ser satisfeita na regiao com curvatura nula, o que e nosso caso. Dateoria das equacoes diferenciais e conhecido, que a equacao (156) representa condicao necessaria e suficiente paraexistencia de solucoes de (153)(veja L. P. Eisenhart, Continuous Groups of Transformations, (Dover Publications Inc.,
NY, 1961), pagina 1). Seja as funcoes ξk′(ξc) representam uma solucao de problema (153), (154). Vamos mostrar,
que elas vao satisfazer tambem a equacao (152). Substituindo ξk′(ξc) na equacao (152), obtemos a funcao
uab(ξc) = ∂aξ
a′∂bξb′δa′b′ − gab. (157)
Se ξk′(ξc) realmente e solucao, a funcao uab deve ser nula. Vamos primeiro confirmar, que u nao depende de ξc:
∂cuab = 0. Calcule
∂cuab = ∂c∂aξa′∂bξ
b′δa′b′ + ∂aξa′∂c∂bξ
b′δa′b′ − ∂cgab= ∂c∂aξ
k′∂bξb′δk′b′ − Γkca∂kξ
k′∂bξb′δk′b′ + ∂c∂bξ
k′∂aξa′δa′k′ − Γkcb∂kξ
k′∂aξa′δa′k′
= (∂c∂aξk′ − Γkca∂kξ
k′)∂bξb′δk′b′ + (∂c∂bξ
k′ − Γkcb∂kξk′)∂aξ
a′δa′k′ = 0, (158)
de acordo com (153). No passagem de primeira para segunda linha foi usada a identidade (17). Entao uab e mesmamatriz numerica em todos pontos. Substituindo o ponto ξc0 na parte direita de (157), e usando (151) e (154), concluimosque ela e nula: uab = 0.
Resumindo, uma superfıcie com Rcmab = 0 e (localmente) isometrica com espaco Euclideano, enquanto superfıciecom Rcmab 6= 0 tem propriedades geometricas diferentes de espaco Euclideano.
Vamos mencionar duas construcoes, que mostram relevancia de tensor de curvatura aos propriedades geometricasde uma superfıcie.Transporte paralelo ao longo dos lados de imagem de um paralelogramo. No plano de coordenadas ξa,construa paralelogramo, com vertices nos pontos 1, 2, 3, 4, gerado pelo um par de vetores v e w, veja Figura 23. Imagemdele e um paralelogramo curvilinear sobre superfıcie, com vertices nos pontos x(1), x(2), x(3), x(4). Considere umvetor tangente K = r′ak
a de S no ponto x(1). Fazendo transporte paralelo dele ao longo de caminho x(1)→ x(2)→x(3), obtemos um vetor K′ no ponto x(3). Fazendo transporte paralelo dele ao longo de caminho x(1)→ x(4)→ x(3),obtemos um vetor K′′ no mesmo ponto x(3). Supondo, que paralelogramo e pequeno: va << 1, wa << 1, podemoscalcular aproximadamente a diferenca entre coordenadas de vetores K′ e K′′: δka = k′′a − k′a. O resultado eproporcional de tensor de curvatura
δka ≈ Rabcd(1)kbvcwd. (159)
13 Observe, que solucoes va(ξc) ≡ ∂aξ1(ξc), wa(ξc) ≡ ∂aξ2(ξc) deste problema vao ser campos paralelos de vetores (contravariantes),criados a partir dos vetores va(ξc0) = (1, 0) e wa(ξc0) = (0, 1).

IV Tensor de curvatura e curvatura de Gauss de superfıcie 41
k
vw
k
2
34
1
k'
''k
FIG. 23: Transporte paralelo ao longo dos lados de imagem de um paralelogramo
a
b
a
bv
w'
'
1
v
w
FIG. 24: ”Paralelogramo” de S com lados geodesicos
Entao, se Rabcd 6= 0 na vizinhanca do ponto 1, os vetores transportados geralmente nao coincidem.”Paralelogramo” com lados geodesicos. Considere direcoes (vetores) V = r′av
a e W = r′awa num ponto 1 de S,
veja Figura 24. Construa geodesica de comprimento a na direcao de vetor V, e geodesica de comprimento b na direcaode W. Faca transporte paralelo de V ao longo de b, e transporte paralelo de W ao londo de a. Na direcao de vetoresresultantes, construa de novo as geodesicas de comprimento a e b. Podemos calcular aproximadamente a diferencaδξa entre coordenadas dos pontos finais destas geodesicas. O resultado e proporcional de tensor de curvatura
δξa ≈ −1
2
(a2bRabcd(1)vbwcvd + ab2Rabcd(1)wbvcwd
). (160)
Entao, se Rabcd 6= 0 na vizinhanca do ponto 1, o ”paralelogramo” geralmente nao e fechado.Discussao feita acima vale para todo espaco de Rieman (ou seja, variedade diferenciavel de n dimencoes com
sımbolos de Christoffel construıdos a partir de metrica de acordo com (99)). Vamos especificar estes resultados parauma superfıcie de R3. Como a = 1, 2, as componentes nao nulas de tensor de Rieman sao ligadas de acordo com (146)como segue: R1212 = −R1221 = R2121 = −R2112. Entao tensor de curvatura de superfıcie tem so uma componenteindependente: R1212. De acordo com (145), a expressao explıcita de R1212 em termos de conexao e
R1212 = ∂1Γ122 − ∂2Γ121 + Γc12Γc12 − Γc11Γc22. (161)
Vamos calcular tensor de Ricci: Rmb = g11Rm11b + g12Rm12b + g21Rm21b + g22Rm22b. Usando simetria (146), compo-nentes dele sao (
R11 R12
R21 R22
)= R1212
(−g22 g12
g21 −g11
). (162)
Daqui curvatura escalar fica (Exercıcio): R = gmbRmb = −2R1212 det gab = −2 R1212
det gab.
Curvatura de Gauss como funcao de metrica. Na equacao (109) curvatura de Gauss foi definida em termosde metrica e segunda forma fundamental. Vamos mostrar, que a definicao equivalente pode ser dada em termos decurvatura escalar.

IV Tensor de curvatura e curvatura de Gauss de superfıcie 42
Teorema egregium. Curvatura de Gauss pode ser apresentada como funcao de metrica e derivadas dela, portantonao depende dos coeficientes de segunda forma fundamental:
K = −1
2R =
R1212(gab)
det gab. (163)
Este resultado foi obtido por C. F. Gauss e chamado por ele teorema egregium (em Latim, ”egregium” significabrilhante).
Como para uma superfıcie de R3 o tensor de curvatura se reduz ao uma so componente R1212 ∼ K, nas afirmacoesacima podemos trocar as palavras ”tensor de curvatura” por ”curvatura de Gauss”.
Combinando teorema egregium com resultados de Paragrafo III G, concluirmos que curvatura de Gauss e invariantepor isometrias:Consequencia. Superficıes isometricas tem mesma curvatura de Gauss nos pontos correspondentes.
Para mostrar o teorema egregium, vamos confirmar que as definicoes (109) e (163) realmente determinam a mesmafuncao escalar. Comparando delas, precisa mostrar
detNab = R1212, (164)
ou seja, detNab nao representa um objeto independente, mas e uma funcao de metrica e derivadas dela. De formulabasica (88): r′′ab = Γcabr
′c +Nabn, calcule produtos escalares seguintes:
(r′′12, r′′12) = Γc12Γc12 +N12N12, (r′′11, r
′′22) = Γc11Γc22 +N11N22. (165)
Usando as definicoes Γcab = gcd(r′d, r′′ab) e Γcab = (r′c, r
′′ab), calcule: (r′′11, r
′′22) = ∂1(r′1, r
′′22)− (r′1, r
′′′122) = ∂1(r′1, r
′′22)−
∂2(r′1, r′′12) + (r′′12, r
′′12) = ∂1Γ122 − ∂2Γ112 + (r′′12, r
′′12), ou (r′′11, r
′′22)− (r′′12, r
′′12) = ∂1Γ122 − ∂2Γ112. Substituindo (165)
na parte esquerda, obtemos
N11N22 −N212 = ∂1Γ122 − ∂2Γ112 + Γc12Γc12 − Γc22Γc11. (166)
Levando em conta (161), temos igualdade desejada (164).Exercıcio 20.1. Encontre tensor de curvatura e curvatura de Gauss de esfera de raio B (use coordenadas conformes).Exercıcio 20.2. Escreva (159) em termos de curvatura de Gauss K. (Resposta: δk1 = −2k2KA, δk2 = 2k1KA, ondeka = gabk
b - componentes contra-variantes de vetor kb, e A = ± area de paralelogramo.)
F. Curvatura normal de superfıcie e curvatura geodesica de curva.
Lembramos que curvatura k1 de curva e velocidade angular de tangente dela. Para uma reta temos k1 = 0, portanto,intuitivamente, valor de curvatura mostra como dada curva e diferente da reta. Uma curva, que passa na direcaoescolhida sobre uma superfıcie, esta ”acompanhando” S. Portanto, curvatura de curva pode ser usada para avaliar,como dada superfıcie e diferente do plano nesta direcao. Vamos discutir o formalismo relevante.
No ponto dado r0, escolhemos uma direcao sobre a superfıcie, ou seja, um vetor tangente unitario τ ∈ T(S),e considere uma curva r(s) em parametrizacao natural, que passa nesta direcao: r′(0) = τ . Curvatura dela ek1 = |r′′(0)|, onde vetor r′′ fica no plano osculador de curva. Vetor normal unitario de superfıcie vamos anotar n.Podemos apresentar r′′ como soma de dois vetores: um na direcao de n e outro no plano tangente, veja Figura 25(a).Para realizar isto, observe que por construcao r′′ e ortogonal de r′, portanto r′′ fica no plano dos vetores (ortonormais)n e [r′,n] ∈ T(S). Portanto na base destes vetores ele fica r′′ = r′′|n+r′′|p = (r′′,n)n+(r′′, [r′,n])[r′,n]. Coordenadasde r′′ nesta base sao chamadas curvaturas normal e geodesica:Def. Curvatura normal kn(τ ) de superfıcie na direcao τ e numero
kn = (r′′,n) = k1 cosφ, r(s) - parametrizacao natural de curva (167)
onde φ e angulo entre r′′ e n. Curvatura geodesica kg(γ) de curva e numero
kg = |(r′′, [r′,n])| ≥ 0, r(s) - parametrizacao natural de curva. (168)
Usando estas notacoes, podemos escrever
r′′ = knn± kg[r′,n], entao k21 = k2
n + k2g . (169)
Descrevemos varias propriedades e interpretacoes das curvaturas.

IV Curvatura normal de S e curvatura geodesica de γ 43
(a) (b)
r
''
'
r
''
''
=
[ ]r ',
r
r''
p
r r'' r r'' ''
n n
n
n(1) (2) (3) (4)
FIG. 25: (a) Definicao de curvatura normal de S e de curvatura geodesica de γ; (b) Visualizacao de Af. 21.1.
Curvatura normal de superfıcie. Vamos escrever expressao para curvatura normal em coordenadas locais ξa
sobre S. Seja ξa(s) - representante de curva: r(s) = r(ξa(s)), entao r′ = r′ava, onde va = dξa
ds sao coordenadas
de r′ = τ . Temos kn = ((r′ava)′,n) = (r′′ab,n)vavb + 0 = Nabv
avb, onde Nab sao coeficientes de segunda formafundamental (101). Eles nao dependem de curva. Observe tambem, que va representam coordenadas da direcao τescolhida sobre S, eles tambem vao ser mesmos para todas as curvas que passam na direcao de τ . Entao, curvaturanormal e mesma para todas as curvas que passam na direcao τ . Portanto kn e uma caracteristica de superfıcie nestadirecao, o que justifica a terminologia: curvatura normal de superfıcie. Entao obtemos o resultado, conhecido comoteorema de Meusnier, veja Figura 25(b).Af. 21.1. (Meusnier) Todas curvas na direcao de vetor unitario τ ∈ T(S) tem mesmo valor de numero k1 cosφ,portanto chamado curvatura normal de superfıcie na direcao τ .
A partir de Figura 25(a) temosAf. 21.2. Pega uma curva plana obtida por intersecao de plano de vetores τ e n (no ponto r0) com a superfıcie.Entao neste ponto modulo de curvatura desta curva coincide com curvatura normal de superfıcie, enquanto curvaturageodesica e nula: kn(τ ) = ±k1(γ), kg(γ) = 0.
No lugar de vetor tangente unitario τ , pega um vetor tangente W com coordenadas ωa. Usando W|W| como uma
direcao τ , obtemos seguinte expressao para curvatura normal na direcao de W = r′aωa
kn = N(τ ) = Nabvavb =
N(W)
g(W)=Nabω
aωb
gcdωcωd. (170)
Na hora de definir Nab no paragrafo IV B), nos vimos uma interpretacao geometrica destes coeficientes. A formula(170) sugere mais uma interpretacao: coeficientes Nab determinam curvatura normal de S.
Curvatura geodesica de curva. De acordo com a definicao dada acima, curvatura geodesica representa compri-mento de vetor d
dsr′ projetado no plano tangente, ou seja, comprimento de derivada covariante
kg(γ) = |Dr′(s)|, ou kg(γ) =[gabDξ
adξb] 1
2
, (171)
onde D - derivada covariante na direcao de curva γ. Entao kg representa aceleracao de curva r(s). Se a curva egeodesica, o campo tangente r′(s) e paralelo (veja equacao (116)): Dr′(s) = 0, portanto temos conclusao:Af. 21.3. Curva e geodesica se e somente se curvatura geodesica dela no cado ponto e nula.Podemos diser, que curvatura geodesica mostra, como a curva e diferente de geodesica.Af. 21.4. No ponto r0, curvatura geodesica de γ coincide com curvatura de curva γ obtida por projecao de γ noplano tangente Tr0(S): kg(γ) = k1(γ).Dem. Por construcao, ambas curvas ficam sobre cilindro com reta-geradora paralela de nS , veja Figura 26. Observe,que kg(γ) = |(r′′, [r′,nS ])| = |(r′′,ncil)| = |kn(cil)|. (Foi usado, que [r′,nS ] = ncil. Realmente, nS e r′ ficam noplano tangente de cilindro, pois sao vetores tangentes das curvas sobre cilindro (reta geradora e γ). Portanto produtovetorial deles nos da vetor normal ao cilindro.)
Por outro lado, como γ fica no plano optogonal do cilindro (plano dos vetores r′ e ncil), de acordo com Af. 21.2temos |kn(cil)| = k1(γ). Entao kg(γ) = k1(γ).
Sabemos, que nao e facil encontrar parametrizacao natural de uma curva. Portanto, e importante escrever asformulas para calcular kg em parametrizacao arbitraria de curva.
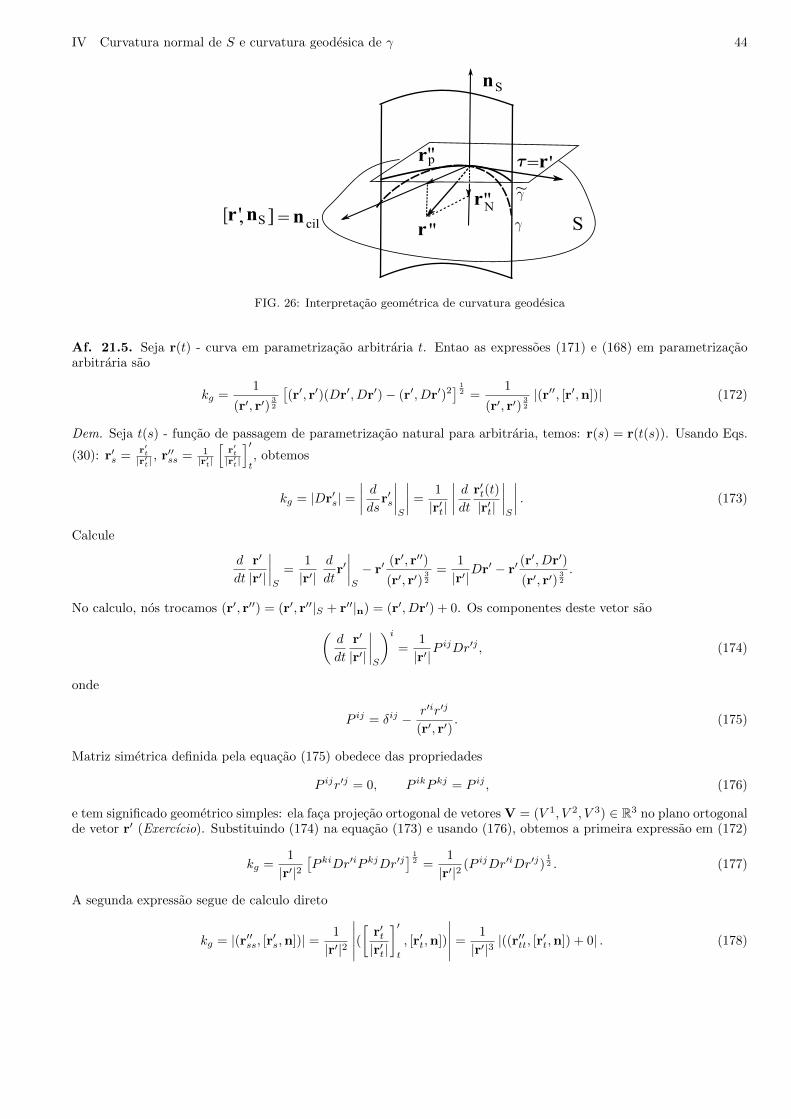
IV Curvatura normal de S e curvatura geodesica de γ 44
r '
r
''
''
=
[ ]r ',
r
Nr''
p
= cil
S
n
n
S n
~
S
FIG. 26: Interpretacao geometrica de curvatura geodesica
Af. 21.5. Seja r(t) - curva em parametrizacao arbitraria t. Entao as expressoes (171) e (168) em parametrizacaoarbitraria sao
kg =1
(r′, r′)32
[(r′, r′)(Dr′, Dr′)− (r′, Dr′)2
] 12 =
1
(r′, r′)32
|(r′′, [r′,n])| (172)
Dem. Seja t(s) - funcao de passagem de parametrizacao natural para arbitraria, temos: r(s) = r(t(s)). Usando Eqs.
(30): r′s =r′t|r′t|
, r′′ss = 1|r′t|
[r′t|r′t|
]′t, obtemos
kg = |Dr′s| =∣∣∣∣ ddsr′s
∣∣∣∣S
∣∣∣∣ =1
|r′t|
∣∣∣∣ ddt r′t(t)
|r′t|
∣∣∣∣S
∣∣∣∣ . (173)
Calcule
d
dt
r′
|r′|
∣∣∣∣S
=1
|r′|d
dtr′∣∣∣∣S
− r′(r′, r′′)
(r′, r′)32
=1
|r′|Dr′ − r′
(r′, Dr′)
(r′, r′)32
.
No calculo, nos trocamos (r′, r′′) = (r′, r′′|S + r′′|n) = (r′, Dr′) + 0. Os componentes deste vetor sao(d
dt
r′
|r′|
∣∣∣∣S
)i=
1
|r′|P ijDr′j , (174)
onde
P ij = δij − r′ir′j
(r′, r′). (175)
Matriz simetrica definida pela equacao (175) obedece das propriedades
P ijr′j = 0, P ikP kj = P ij , (176)
e tem significado geometrico simples: ela faca projecao ortogonal de vetores V = (V 1, V 2, V 3) ∈ R3 no plano ortogonalde vetor r′ (Exercıcio). Substituindo (174) na equacao (173) e usando (176), obtemos a primeira expressao em (172)
kg =1
|r′|2[P kiDr′iP kjDr′j
] 12 =
1
|r′|2(P ijDr′iDr′j)
12 . (177)
A segunda expressao segue de calculo direto
kg = |(r′′ss, [r′s,n])| = 1
|r′|2
∣∣∣∣∣([
r′t|r′t|
]′t
, [r′t,n])
∣∣∣∣∣ =1
|r′|3|((r′′tt, [r′t,n]) + 0| . (178)

IV Paraboloide osculador e classificacao dos pontos de superfıcie 45
Af. 21.6. Em coordenadas locais ξa de superfıcie, as expressoes (172) para curvatura geodesica tem forma seguinte
kg =
√det gab
(gabξaξb)32
∣∣∣Dξ1ξ2 −Dξ2ξ1∣∣∣ , (179)
onde D - derivada covariante na direcao de representante ξa(t) de curva γ.
Observe, que nos encontramos mais uma equacao: Dξ1ξ2−Dξ2ξ1 = 0 que permita verificar se uma curva ξa(t) emparametrizacao arbitraria e uma geodesica.Dem. Para confirmar (179), vamos substituir expressao para produto escalar de R3: (V,W) = gabv
aωb na primeiraexpressao da equacao (172). Obtemos
kg = (gabξaξb)−
32
[(ξgξ)(DξgDξ)− (ξgDξ)2
] 12
. (180)
Escrevendo os produtos escalares em forma explıcita, depois de calculo direto obtemos
(ξgξ)(DξgDξ)− (ξgDξ)2 =
g11g22ξ1ξ1Dξ2Dξ2 + 2g12g12ξ
1ξ2Dξ1Dξ2 + g22g11ξ2ξ2Dξ1Dξ1−
g12g12ξ1ξ1Dξ2Dξ2 − 2g11g22ξ
1ξ2Dξ1Dξ2 − g12g12ξ2ξ2Dξ1Dξ1 ≡
(g11g22 − g12g12)(Dξ1ξ2 −Dξ2ξ1)2. (181)
Substituindo este rezultado na expressao (180), obtemos o resultado desejado (179).O mesmo resultado pode ser obtido comecando com ultima expressao da equacao (172). Realmente, vamos substituir
r′ = r′aξa e r′′ = r′′|S + r′′|n = Dr′ + r′′|n = r′aDξ
a + r′′|n na expressao
kg =1
(r′, r′)32
|(r′′, [r′,n])| = 1
(r′, r′)32
∣∣∣(r′a, [r′b,n])Dξaξb + 0∣∣∣ =
|(r′1, [r′2,n])|(r′, r′)
32
∣∣∣Dξ1ξ2 −Dξ2ξ1∣∣∣ . (182)
Exercıcio 21.1. Usando a equacao (53), observe a igualdade
|(r′1, [r′2,n])| = |([r′1, r′2],n)| =√
det gab. (183)
Usando esta formula em (182), obtemos (179).Exercıcio 21.2. Considere a curva γ ∈ R3 com propriedade seguinte: todas retas na direcao de normais principais deγ passam por um ponto O. Mostre que γ fica sobre uma esfera com centro no ponto O. Alem disso, mostre que γ euma circunferencia de maior raio desta esfera. (Sugestao: considere γ em coordenadas de R3 com inıcio no ponto O.)Exercıcio 21.3. Encontre curvatura geodesica de circunferencia de raio b, obtida por intersecao de um plano comesfera de raio a.
G. Visualizacao de curvaturas normais: paraboloide osculador, curvaturas principais, indicatriz decurvatura, e classificacao dos pontos de superfıcie.
Seja τ ∈ Tr0(S) - uma direcao no plano tangente no ponto r0 de superfıcie. Curvatura normal (170): kn(τ ) euma funcao de direcao τ . Vasmos escolher uma base ortonormal de vetores V, W do plano tangente, entao podemosescrever τ = V cos θ + W sin θ, onde θ e angulo entre τ e V. Se V = r′av
a e W = r′aωa, podemos escrever τ em
base r′a: τ = r′a(va cos θ+ ωa sin θ). Substituindo τ na expressao de curvatura normal, kn(r′apa) = Nabp
apb, obtemosuma funcao de θ: kn(θ), θ ∈ [0, 2π]. Uma funcao, contınua no intervalo, atinge valores maximo: kmax, e mıniimo:kmin. Estes valores sao chamados curvaturas porincipais, enquanto as direcoes correspondentes sao direcoes principais.Neste paragrafo vamos descrever varios jeitos para visualizar as curvaturas normais kn(τ ), e calcular curvaturas edirecoes principais.
Paraboloide osculador. Analise de curvaturas normais em coordenadas especiais. Considere umasuperfıcie em sistema de coordenadas Cartesianas de R3 com inicio no ponto r0 ∈ S e com eixos x e y no planotangente. Vamos escolher x e y como coordenadas locais: r(ξa) = (x = ξ1, y = ξ2, z = f(ξ1, ξ2)). Usando series deTaylor, escrevemos equacao de superfıcie na aproximacao O3(ξa): z = f(0)+f ′a(0)ξa+ 1
2f′′ab(0)ξaξb+O3(ξa). Observe
o seguinte. Primeiro, temos: f(0) = 0 por construcao de sistema de coordenadas. Segundo, vetores tangentes as retascoordenadas sao: r′1(0) = (1, 0, f ′1(0)) e r′2(0) = (0, 1, f ′2(0)). Como estes vetores ficam no plano (x, y), concluirmos

IV Paraboloide osculador e classificacao dos pontos de superfıcie 46
que f ′a(0) = 0. Isto implica, em particular, que metrica no ponto r0 tem forma Euclideana: gab = δab. Terceiro, comovetor normal a superfıcie coincide com eixo z: n = (0, 0, 1), temos14 para coeficientes de segunda forma fundamental(SFF): Nab = (r′′ab(0),n) = f ′′ab(0). Levando tudo isto em conta, a equacao da nossa superfıcie e
z =1
2Nabξ
aξb +O3(ξa). (184)
Portanto, na vizinhanca do ponto escolhido a nossa superfıcie aproximadamente e um paraboloide15 determinado porcoeficientes de SFF neste ponto: z = 1
2Nabξaξb. Ele e chamado paraboloide osculador no ponto r0 ∈ S.
Usando vetor unitario τa = ξa
|ξ| na direcao do ponto (ξ1, ξ2), podemos escrever (ξ1, ξ2) = (|ξ|τ1, |ξ|τ2), e formula
(184) pode ser escrita em termos de curvatura normal (170) de S na direcao va
z =1
2Nabτ
aτ b|ξ|2 +O3(ξa) ≡ 1
2kn(τ )|ξ|2 +O3(ξa). (185)
Isto mostra com clareza, que curvatura normal kn(τ ) determina afastamento de pontos de superfıcie do plano tangente,quando nos estamos nos afastando do ponto r0 ∈ S na direcao τ no plano tangente.
Lembramos, que de acordo com geometria analıtica, escolhendo coordenadas apropriadas, a equacao de paraboloidez = 1
2Nabξaξb pode ser escrita em uma das tres formas canonicas. Isto acontece depois de fazer uma rotacao no plano
(x, y) (feita para diagonalizar a matriz N), trocar nomes de cordenadas: x ↔ y, e sentido de vetor normal n, se fornecessario. Supondo, que as transformacoes necessarias foram feitas, temos tres casos:
1. Se detN > 0, a forma canonica e z = 12 (x
2
a2 + y2
b2 ) - paraboloide elıptico. Neste caso
Nab =
(1a2 0
0 1b2
)=
(kmin 0
0 kmax
), supondo a ≥ b. (186)
A segunda igualdade affirma, que neste sistema de coordenadas (e somente neste!), N11(r0) e N22(r0) coincidem comcurvaturas principais neste ponto16. Para confirmar isto observe, que curvatura normal na direcao (ξ1, ξ2) ≡ (x, y),x2 + y2 = 1 e
kn(x, y) = Nabξaξb =
x2
a2+y2
b2= kminx
2 + kmaxy2. (187)
Em particular, na direcao (0, 1) a curvatura normal e: kn = kmax = 1b2 , enquanto na direcao (1, 0) temos kmin = 1
a2 .
E facil ver, que 1a2 ≤
x2
a2 + y2
b2 ≤1b2 para todo (x, y) com x2 + y2 = 1, ou seja kmin ≤ kn ≤ kmax. Portanto, kmin e
kmax sao curvaturas normais minimal e maximal no ponto r0.Para presente caso, as curvaturas principais tem mesmo sinal.
2. Se detN < 0, a forma canonica e z = 12 (x
2
a2 −y2
b2 ) - paraboloide hiperbolico. Neste caso
Nab =
(1a2 0
0 − 1b2
)=
(kmax 0
0 kmin
). (188)
De novo, temos duas direcoes e curvaturas principais. Curvaturas principais tem sinal diferente. Apesar disto, nasdirecoes de retas y = ± b
ax, a curvatura normal e nula. Estas direcoes sao chamadas direcoes assintoticas.
3. Se detN = 0, mas Nab nao e matriz nula, a forma canonica e z = x2
2c2 - paraboloide cilındrico (ou cilindro). Neste
caso17
Nab =
(1c2 0
0 0
)≡
(kmax 0
0 kmin
). (189)
14 Observe, que para qualquer outro ponto r: f ′′ab(r) 6= Nab(r).15 Paraboloide osculador pode ser definido sem mencionar coordenadas locais: um paraboloide, que tem um ponto r0 em comum com a
superfıcie, e chamado osculador, se limr→r0d(r,parab)
d2(r,r0)= 0, onde r e um ponto de superfıcie. Pode ser mostrado (veja Pogorelov), que
paraboloide osculador e unico e esta determinado pelo segunda forma fundamental de S.16 Observe que, por definicao, curvaturas principais sao curvaturas normais nas certas direcoes, ou seja, kmax e kmin nao dependem de
escolha de coordenadas (sao escalares). Isto segue tambem das equacoes (208) abaixo. No contrario com isto, os coeficientes Nab mudamno passagem de um sistema para outro.
17 Observe, que de acordo com a nossa terminologia, paraboloide osculador de paraboloide elıptico z = x2
a2+ y2
b2no ponto (0, 0) e
z = 12
( 2x2
a2+ 2y2
b2), ou seja, coeficientes de SFF neste ponto sao 2
a2e 2b2
.

IV Paraboloide osculador e classificacao dos pontos de superfıcie 47
Curvatura normal e maxima, kmax = 1c2 na direcao de eixo x, e e minima (nula) - na direcao de eixo y. Portanto
direcao assintotica coincide com direcao de curvatura minima.De acordo com analise feito acima, sao classificados os pontos de superfıcie:
Def. r0 e ponto elıptico de S, se detN > 0; ponto hiperbolico, se detN < 0; ponto parabolico, se detN = 0 mas Nabnao e matriz nula; ponto planar, se Nab = 0.Exercıcio 22.1. Mostre que todos pontos de esfera sao elıpticos (mais do que, sao umbılicos, isto quer dizer a2 = b2).
Comentarios.1. Embora em analise feito acima foi usado um sistema de coordenadas especial, natureza de um ponto pode ser
analisada usando um sistema arbitrario. Realmente, de regra de transformacao de SFF: N ′ab = ∂ξα
∂ξ′a∂ξβ
∂ξ′bNαβ segue,
que sinal de determinante de N e invariante de troca de coordenadas: detN ′ = detN(
det ∂ξ∂ξ′
)2
. Portanto, a natureza
de um ponto de S podemos analizar, calculando detN em qualquer uma parametrizacao de superfıcie.2. De acordo com Eq. (109), determinante de SFF esta ligado com curvatura de Gauss: detN = K det g, masdet g > 0, portanto sinais de detN e K coincidem. Entao, para classificar os pontos de S, sinal de curvatura de Gausspode ser usado no lugar de sinal de detN .Formula de Euler. Com dada direcao (x, y), x2 + y2 = 1, vamos associar o angulo correspondente: x = cos θ,y = sin θ. Formula (187), que liga curvatura normal na direcao θ com curvaturas principais (e que vale igualmentepara os pontos elıpticos, hiperbolicos e parabolicos), agora fica
kn(θ) = kmin cos2 θ + kmax sin2 θ. (190)
Ela e conhecida como formula de Euler.Relacoes entre varias curvaturas. Usando as equacoes (109) e (110) podemos relacionar as curvaturas principaiscom curvatura de Gauss K e curvatura media H. K e H sao funcoes escalares, ou seja, podemos calcular delas usandoqualquer um sistema de coordenadas. Vamos escolher coordenadas especiais x = ξ1, y = ξ2 descritas no inıcio desteparagrafo, e ainda com eixos x e y nas direcoes principais. Temos gab = δab e Nab = diag(kmin, kmax), portanto
K =detNabdet gcd
= kminkmax, H =1
2gabNab =
1
2(kmin + kmax), ou
kmax,min = H ±√H2 −K. (191)
Sinal de curvatura de Gauss tem certa interpretacao geometrica, veja Exercıcio 22.8.Exercıcio 22.2. Observe, que as curvaturas principais sao solucoes de equacao quadratica
k2 − 2Hk +K = 0. (192)
Comentario. Provavelmente, as formulas (208) e (209) sao entre as mais simples para buscar na pratica as curvaturasprincipais.Analise de curvaturas normais em coordenadas arbitrarias.Af. 22.2. Seja as matrizes numericas gab e Nab representam metrica e segunda forma fundamental num ponto de S,em uma parametrizacao ξa. Considere o problema de autovetores
Nv = λgv, (193)
acompanhado com equacao caracterıstica correspondente
det(N − λg) = 0. (194)
Entao autovalores λ sao curvaturas principais, enquanto os vetores V = r′ava, formados dos autovetores v de problema,
apontam nas direcoes principais.Dem. Lembramos alguns fatos de algebra linear. Considere espaco vetorial real de duas dimencoes com produtointerno (v,w) = gabv
awb. Matriz g−1N determina um operador linear18 neste espaco: v → g−1Nv. Por meio decalculo direto, temos: (g−1Nv,w) = (v, g−1Nw), ou seja, g−1N e auto-adjunto. Considere o problema (193), (194) deencontrar autovalores e autovetores deste operador. De acordo com teoremas conhecidas em algebra linear, resolvendoeste problema, encontraremos pelo menos dois autovetores ortogonais de operador auto-adjunto g−1N . Normalizando
18 Observe: de acordo com (65), (105) e (106), Nabvb tem regra de transformacao diferente de va. No contrario com isto, gabNbcv
c temmesma regra de transformacao como va.

IV Paraboloide osculador e classificacao dos pontos de superfıcie 48
deles, obtemos uma base ortonormal de espaco vetorial, formada de autovetores de g−1N . Vamos anotar estes vetores(v1, v2)T e (ω1, ω2)T , e seja λ1 ≤ λ2 sao autovalores correspondentes. Por construcao, temos
gabvavb = 1, gabω
aωb = 1, gabvaωb = 0; (195)
Nabvb = λ1gabv
b, Nabωb = λ2gabω
b. (196)
Construa vetores do plano tangente a superfıcie com estes representantes:
V = r′ava, W = r′aω
a. (197)
Por construcao, eles sao ortonormais (no sentido de R3), e formam uma base ortonormal de plano tangente. Dadadirecao τ , |τ | = 1 no plano tangente, podemos escrever τ = τ1V+τ2W, dai para coordenadas τa temos (τ1)2+(τ2)2 =1. Usando (197), obtemos tambem expressao para τ em base r′a: τ = r′a(τ1va + τ2ωa). Usando (196), vamos calcularcurvaturas normais nas direcaoes V, W e τ (lembramos: kn(r′ap
a) = Nabpapb)
kn(V) = λ1, kn(W) = λ2. (198)
kn(τ ) = (τ1va + τ2ωa)Nab(τ1vb + τ2ωb) = λ1(τ1)2 + λ2(τ2)2, (199)
Equacoes (198) e (199), junto com (τ1)2 + (τ2)2 = 1, implicam
λ1 ≤ kn(τ ) ≤ λ2. (200)
Equacoes (198) afirmam, que autovalores λi sao curvaturas normais nas direcoes ortogonais V e W no plano tangente.Equacao (200) significa, que λ1 e curvatura minimal, enquanto λ2 e curvatura maximal.
Substituindo τ1 = cos θ e τ2 = sin θ na equacao (199), obtemos mais uma vez formula de Eiler (190).
Exercıcio/exemplo 22.3. Vamos calcular curvaturas no ponto (x, y) de paraboloide elıptico: z = x2
a2 + y2
b2 . Usando a
parametrizacao r = (x, y, x2
a2 + y2
b2 ), obtemos: g11 = 1 + 4x2
a4 , g12 = 1 + 4xya2b2 , g22 = 1 + 4y2
b4 , N11 = 2na2 , N12 = 0,
N22 = 2nb2 , onde n =
√1 + 4x2/a4 + 4y2/b4 =
√det g. De acordo com (194), as curvaturas principais sao solucoes de
equacao quadratica
n4a2b2λ2 − 2n(a2 + b2 + 4z)λ+ 4 = 0, onde z =x2
a2+y2
b2. (201)
Curvatura de Gauss e curvatura media obtemos de acordo com (208)
K =detN
det g=
4
n4a2b2, H =
1
2trace(g−1N) =
a2 + b2 + 4z
n3a2b2. (202)
Indicatriz de curvatura (de Dupin). Seja Nab e gab sao formas fundamentais calculadas no ponto r0(ξ0), emuma parametrizacao ξa de S. De acordo com (170), modulo de curvatura normal na direcao de vetor W = r′aω
a e
|kn(W)| = |Nabωaωb|
|gcdωcωd|. (203)
Desta formula imediatamente temos:Af. 22.2. Seja os numeros ω1 e ω2 obedecem a equacao de quadrica
|Nabωaωb| = 1. (204)
Entao curvatura normal na direcao de vetor W(ωa) e |kn(W)| = 1|ω|2 . Quadrica (204) e chamada indicatriz de
curvatura (de Dupin). Ela e ou elipse (no ponto elıptico), ou um par de hiperboles (no ponto hiperbolico), ou umpar de retas19 (no ponto parabolico). Curvaturas principais e direcoes corespondentes podemos encontrar buscandoautovalores e autovetores de N .
19 Indicatriz de curvatura pode ser literalmente visualizada como uma quadrica no plano tangente, se vamos trabalhar com ela emcoordenadas de R3 descritas no inicio deste paragrafo. Cruzando paraboloide osculador (184) com plano z = 1
2(ou z = − 1
2) obtemos
uma curva de segundo grau (elipse, um par de hiperboles ou um par de retas) com a equacao |Nabξaξb| = 1. Ela fica no plano paraleloao plano tangente, entao vamos identificar este plano com o plano tangente. Se vetor W(ωa) e vetor de posicao de ponto ξa de quadrica,entao kn(W) = 1
|W|2 .

IV Discussao 49
Curva de curvatura e curva de S com vetor tangente apontando na direcao principal de S em cada ponto. Deacordo com Af. 22.2, representante dela ξb(t) obedece a equacao
Nabξb = λgabξ
b. (205)
Vamos reescrever esta equacao em termos de curva de R3: r(t) = r′aξa ≡ r′av
a ∈ S. Multiplicando (205) por r′cgca,
obtemos
r′cgcaNabv
b = λr′. (206)
Agora, escreva identicamente
Nabvb = gacg
cdNdbvb = (r′a, r
′c)g
cdNdbvb = (r′a, r
′cgcdNdbv
b). (207)
Por outro lado
Nabvb = (r′′ab,n)vb = vb(
∂
∂ξbr′a,n) =
(dr′adt,n
)= −
(r′a,
dn
dt
). (208)
Comparando as duas expressoes, podemos escrever
r′cgcdNdbv
b = −dndt. (209)
Substituindo este resultado na equacao (206), obtemos equacao para curva de curvatura r(t) em forma
− d
dtn(r(t)) = λ(t)r′(t). (210)
Este resultado e conhecido como teorema de Rodrigues.Curva assintotica e curva de S com vetor tangente apontando na direcao assintotica de S em cada ponto. Porconstrucao, curva assintotica r(s) obedece a equacao: (r′′(s),n(r(s))) = 0.Exercıcio 22.4. Seja um ponto de quardica tem angulo θ com semieixo (maior) dela. Encontre relacao entre compri-mento deste ponto ate o centro, e semi-eixos a e b. (Resposta: formula de Euler.)Exercıcio 22.5. Seja a curva r(t) ⊂ S e uma reta. Entao ela e curva assintotica.Exercıcio 22.6. No cado ponto de uma curva assintotica o plano osculador dela coincide com plano tangente a S.Exercıcio 22.7. Demonstre: numa regiao de S, as curvas-coordenadas sao curvas-assintoticas se e somente se N11 =N22 = 0 nesta regiao.Exercıcio 22.8. Seja a) duas superfıcies tem a curva γ como intersecao; b) no cado ponto de γ o angulo entre assuperfıcies e mesmo; c) γ e curva de curvatura de uma superfıcie. Entao γ e curva de curvatura da outra ´superfıcietambem.Exercıcio 22.9. Se esfera (ou plano) cruza uma superfıcie dando a curva γ, e no cado ponto de γ angulo entre assuperfıcies e mesmo, entao γ e curva de curvatura.Exercıcio 22.10. Plano tangente no ponto r0 divide R3 nos dois subespacos. K > 0 implica que (localmente) S ficanum destes subespacos, enquanto no caso K < 0 em cada vizinhanca de r0 tem pontos de S dos ambos subespacos.Exercıcio 22.11. Usando formalismo de paraboloide osculador, calcule curvatura de Gauss de esfera de raio a.Exercıcio 22.12. Encontre curvatura de Gauss de paraboloide hiperbolico num ponto r0.Exercıcio 22.13. Pseudo-esfera e superfıcie de revolucao gerada pelo tractriz. Considere pseudo-esfera emparametrizacao: r(α, β) = (C sinα cosβ, C sinα sinβ, C[cosα+ ln(tg α
2 )]), onde C =const, 0 < α < π2 , 0 ≤ β < 2π.
(a) Confirme, que pseudo-esfera e superfıcie regular (verificando a condicao (C) da definicao).(b) Calcule curvatura de Gauss, cuvatura media e as curvaturas principais.
H. Discussao.
Como nos vimos, primeira e segunda formas fundamentais contem informacoes importantes sobre a superfıcie. Seraque elas sabem tudo sobre uma dada superfıcie? Mais precisamente, podemos perguntar, se a superfıcie pode serreconstruida20 a partir de duas dadas formas quadraticas? A resposta positiva e dada pelo teorema de Bonnet.
20 Recordamos que a curva pode ser reconstruida a partir de dadas curvatura e torcao, veja Paragrafo II F.
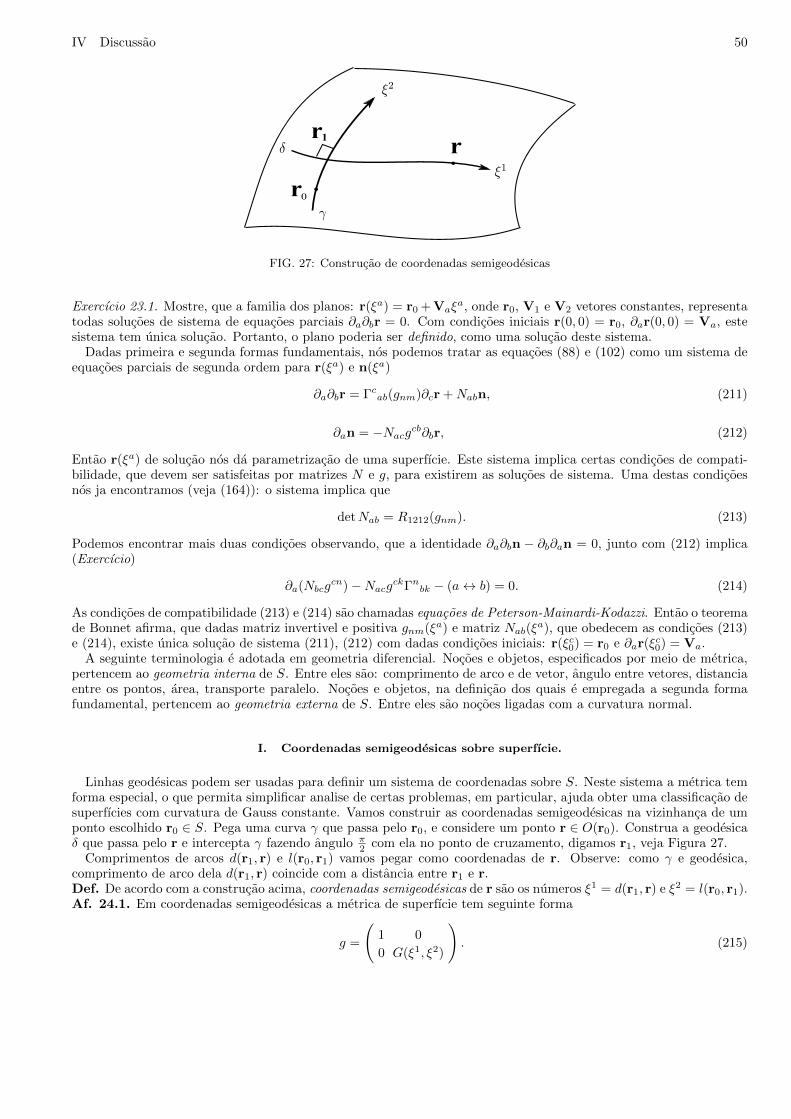
IV Discussao 50
.r0
r.r1
FIG. 27: Construcao de coordenadas semigeodesicas
Exercıcio 23.1. Mostre, que a familia dos planos: r(ξa) = r0 + Vaξa, onde r0, V1 e V2 vetores constantes, representa
todas solucoes de sistema de equacoes parciais ∂a∂br = 0. Com condicoes iniciais r(0, 0) = r0, ∂ar(0, 0) = Va, estesistema tem unica solucao. Portanto, o plano poderia ser definido, como uma solucao deste sistema.
Dadas primeira e segunda formas fundamentais, nos podemos tratar as equacoes (88) e (102) como um sistema deequacoes parciais de segunda ordem para r(ξa) e n(ξa)
∂a∂br = Γcab(gnm)∂cr +Nabn, (211)
∂an = −Nacgcb∂br, (212)
Entao r(ξa) de solucao nos da parametrizacao de uma superfıcie. Este sistema implica certas condicoes de compati-bilidade, que devem ser satisfeitas por matrizes N e g, para existirem as solucoes de sistema. Uma destas condicoesnos ja encontramos (veja (164)): o sistema implica que
detNab = R1212(gnm). (213)
Podemos encontrar mais duas condicoes observando, que a identidade ∂a∂bn − ∂b∂an = 0, junto com (212) implica(Exercıcio)
∂a(Nbcgcn)−NacgckΓnbk − (a↔ b) = 0. (214)
As condicoes de compatibilidade (213) e (214) sao chamadas equacoes de Peterson-Mainardi-Kodazzi. Entao o teoremade Bonnet afirma, que dadas matriz invertivel e positiva gnm(ξa) e matriz Nab(ξ
a), que obedecem as condicoes (213)e (214), existe unica solucao de sistema (211), (212) com dadas condicoes iniciais: r(ξc0) = r0 e ∂ar(ξc0) = Va.
A seguinte terminologia e adotada em geometria diferencial. Nocoes e objetos, especificados por meio de metrica,pertencem ao geometria interna de S. Entre eles sao: comprimento de arco e de vetor, angulo entre vetores, distanciaentre os pontos, area, transporte paralelo. Nocoes e objetos, na definicao dos quais e empregada a segunda formafundamental, pertencem ao geometria externa de S. Entre eles sao nocoes ligadas com a curvatura normal.
I. Coordenadas semigeodesicas sobre superfıcie.
Linhas geodesicas podem ser usadas para definir um sistema de coordenadas sobre S. Neste sistema a metrica temforma especial, o que permita simplificar analise de certas problemas, em particular, ajuda obter uma classificacao desuperfıcies com curvatura de Gauss constante. Vamos construir as coordenadas semigeodesicas na vizinhanca de umponto escolhido r0 ∈ S. Pega uma curva γ que passa pelo r0, e considere um ponto r ∈ O(r0). Construa a geodesicaδ que passa pelo r e intercepta γ fazendo angulo π
2 com ela no ponto de cruzamento, digamos r1, veja Figura 27.Comprimentos de arcos d(r1, r) e l(r0, r1) vamos pegar como coordenadas de r. Observe: como γ e geodesica,
comprimento de arco dela d(r1, r) coincide com a distancia entre r1 e r.Def. De acordo com a construcao acima, coordenadas semigeodesicas de r sao os numeros ξ1 = d(r1, r) e ξ2 = l(r0, r1).Af. 24.1. Em coordenadas semigeodesicas a metrica de superfıcie tem seguinte forma
g =
(1 0
0 G(ξ1, ξ2)
). (215)

IV Coordenadas semigeodesicas sobre superfıcie 51
Dem. Pontos das curvas γ e β tem coordenadas (0, ξ2) e (ξ1, const), ou seja, os representantes delas em coordenadassemigeodesicas sao
γ ∼
ξ1 = 0
ξ2 = tδ ∼
ξ1 = s
ξ2 = const(216)
Portanto os vetores tangentes delas tem coordenadas V ∼ va = (0, 1) e W ∼ ωb = (1, 0) no cado ponto. Calculandoproduto escalar deles no ponto r1 temos, devido de ortogonalidade deles: gab(r1)vaωb = g12(r1) = 0 ou
g12(0, ξ2) = 0, para todo ξ2. (217)
Entao esta componente de metrica e nula ao longo de γ.Observe que s e parametrizacao natural de geodesica δ (e t de curva γ). Portanto a distancia entre os pontos
(ξ1 = a, ξ2 = c) e (ξ1 = b, ξ2 = c) dela e b − a. Por outro lado l = b − a =∫ bads√gnmωnωm =
∫ bads√g11(s, c). Isto
implica
g11(ξ1, ξ2) = 1, para todo ξ1, ξ2. (218)
Entao esta componente de metrica e fixa em toda regiao.Como δ e geodesica em parametrizacao natural, ela obedece das equacoes ξ′′a + Γabcξ
bξc = 0. Substituindo (216),obtemos Γ1
11 = Γ211 = 0. Junto com (218) estas equacoes implicam ∂g12 = 0 (Exercıcio), ou seja, g12(ξ1, ξ2) nao
depende de ξ1. Portanto g12(ξ1, ξ2) = g12(0, ξ2) = 0, onde a ultima ugualdade e devido de (217).Exercıcio 24.1. Considere as curvas-coordenadas de coordenadas semigeodesicas: γ ∼ (ξ1 = const, ξ2 = t) e δ ∼ (ξ1 =const, ξ2 = t). Mostre que as duas familias sao ortogonais uma da outra no cado ponto.Exercıcio 24.2. Mostre que simbolos de Christoffel nao nulos em coordenadas semigeodesicas sao
Γ212 =
∂1G
2G, Γ1
22 = −1
2∂1G, Γ2
22 =∂2G
2G. (219)
Exercıcio 24.3. Calcule curvatura de Gauss em coordenadas semigeodesicas
K = −∂1∂1
√G√
G. (220)
Exercıcio 24.4. Seja ξa(t) e representante de uma curva em coordenadas semigeodesicas. Entao curvatura geodesicadela e (use (179))
kg =
√G
[(ξ′1)2 +G(ξ′2)2]32
(ξ′′1ξ′2 − ξ′′2ξ′1 − 1
2∂1G(ξ′2)3 − ∂2G
2Gξ′1(ξ′2)2 − ∂1G
G(ξ′1)2ξ′2
). (221)
Exercıcio 24.5. Mostre que (221) pode ser escrito em forma seguinte
kg =−1
[(ξ′1)2 +G(ξ′2)2]12
(d
dtarctan
√Gξ′2
ξ′1+ ξ′2∂1
√G
). (222)
(jeito mais facil e calcular derivada de arctangente e comparar o resultado com (221)).Sobre classificacao de superfıcies com curvatura de Gauss constante.Exercıcio 24.6. Se a curva γ na construcao de sistema de coordenadas tambem foi escolhida uma geodesica, entao ascoordenadas resultantes sao chamadas coordenadas geodesicas. Mostre, que neste caso
G(0, ξ2) = 1, ∂1G(0, ξ2) = 0. (223)
Exercıcio 24.7. Observe, que na parametrizacao r(ϕ, α) = (cosα cosϕ, cosα sinϕ, sinα), 0 < α < 2π, −π2 < ϕ < π2
de esfera, as variaveis α e ϕ sao coordenadas geodesicas.Seja S - superfıcie com curvatura de Gauss constante. Em coordenadas geodesicas, a expressao (220)
∂1∂1
√G+K
√G = 0, (224)
podemos considerar como equacao diferencial ordinaria para determinar a metrica G(ξ1, ξ2) de S, usando (223) como
condicoes iniciais. Por exemplo, no caso de K > 0 temos a solucao geral√G = c1(ξ2) cos(
√Kξ1) + c2(ξ2) sin(
√Kξ1).

IV Coordenadas semigeodesicas sobre superfıcie 52
i
S
n
V
+
-
V
FIG. 28: Curva γ e a fronteira de regiao Γ
As condicoes iniciais implicam c1 = 1 e c2 = 0. Entao, toda superfıcie com curvatura de Gauss positiva tem seguintemetrica em coordenadas geodesicas
K > 0 : g =
(1 0
0 cos2(√Kξ1)
)(225)
Semelhante, temos
K < 0 : g =
(1 0
0 cosh2(√−Kξ1)
)(226)
K = 0 : g =
(1 0
0 1
)(227)
Observe algumas consequencias imediatas deste calculo:Af. 24.2. Todas superfıcies com curvatura ge Gauss constante positiva (ou negativa, ou nula) sao (localmente)isometricas.Af. 24.3. Superfıcie com curvatura de Gauss nula e (localmente) isometrica com um plano.Af. 24.4. Superfıcie com curvatura de Gauss positiva e (localmente) isometrica com uma esfera.
J. Teorema de Gauss-Bonnet (este paragrafo esta em fase de construcao).
Vamos discutir vercao local deste teorema. Varias aplicacoes dela sao bem impressionantes, mostrando, como acurvatura de Gauss determina algumas propriedades de geometria interna de superfıcie.
Considere regiao Γ de S com a fronteira curva fechada regular por partes γ = Im r(t), t ∈ [t1, t2], orientadanegativamente em relacao de n (isto implica orientacao horaria do representante ξa(t) de γ no plano R2). Sejaφ1, φ2, . . . φn - angulos internos entre as partes regulares de γ, veja Figura 28,
∮γkgdl - integral de linha de curvatura
geodesica de γ, e∫ ∫
ΓKds - integral de superfıcie de curvatura de Gauss de S.
Teorema de Gauss-Bonnet. ∮γ
kgdl +
n∑i=1
(π − φi) = 2π −∫ ∫
Γ
Kds. (228)
Dem. Vamos fazer demonstracao para a curva regular, entao∮γ
kgdl = 2π −∫ ∫
Γ
Kds. (229)

IV Teorema de Gauss-Bonnet 53
Primeiro, recordamos alguns fatos sobre as integrais.Integral de linha de funcao escalar. Usando uma particao de r(t), e a expressao4li = |4ri| ≈
√(r′, r′)4t ≡ |V(ti)|4t
para comprimento de intervalo entre os pontos de particao r(ti+1) e r(ti), temos∮γ
kgdl = limk→∞
k∑i=1
kg(ti)4li = limk→∞
k∑i=1
kg(ti)|V(ti)|4t =
t2∫t1
kg|V(t)|dt, (230)
onde a ultima expressao ja representa uma integral definida.Integral de superfıcie de funcao escalar. Usando uma particao de Γ (veja Paragrafo III E), temos∫ ∫
Γ
Kds = limk→∞
k∑i=1
K(ξai )4si =
limk→∞
k∑i=1
K(ξai )√
det gab(ξai )dξ1dξ2 =
∫ ∫Ω
K√
det gabd2ξ. (231)
A ultima expressao representa integral dupla sobre a regiao Ω de R2 que corresponde de Γ.
Integral de linha de campo vetorial no plano. Se ~F = (F1, F2) - campo vetorial no plano ξa, e ξa(t) - uma curva,temos ∫
γ
(~F , ~dξ) ≡∫γ
F1dξ1 + F2dξ
2 = limk→∞
k∑i=1
(F1(ξai )4ξ1i + F2(ξai )4ξ1
i ) =
limk→∞
k∑i=1
(F1ξ′1 + F2ξ
′2)4t =
t2∫t1
(F1ξ′1 + F2ξ
′2)dt. (232)
A ultima expressao ja representa uma integral definida.Se ξa(t) - uma curva fechada orientada no sentido horario, existe formula de Green que liga integral de linha de
campo vetorial e integral dupla:∮γF1dξ
1 +F2dξ2 = −
∫ ∫Ω
(∂1F2− ∂2F1)d2ξ. No caso de campo especial (0, F2), esta
formula implica
t2∫t1
ξ′2F2dt = −∫ ∫
Ω
∂1F2d2ξ. (233)
Substituindo (230) e (231) na formula de Gauss-Bonnet (229), obtemos para ela a expressao
t2∫t1
kg|V|dt = 2π −∫ ∫
Ω
K√
det gabd2ξ. (234)
Como todos membros da equacao (229)) nao dependem de escolha de sistema de coordenadas ξa, podemos analisar
dela em coordenadas semigeodesicas. Neste caso temos: |V| =√
(ξ′1)2 +G(ξ′2)2,√
det gab =√G, e as expressoes
para kg e K sao dadas pela equacoes (222) e (220). Substituindo tudo isto na equacao (234), ela fica
− arctan
√Gξ′2
ξ′1
∣∣∣∣∣t2
t1
−t2∫t1
ξ′2∂1
√Gdt = 2π +
∫ ∫Ω
∂1∂1
√Gd2ξ. (235)
Usando (233) com F2 = ∂1
√G, a formula de Gauss-Bonnet se reduz ao afirmacao seguinte
arctan
√Gξ′2
ξ′1
∣∣∣∣∣t2
t1
= −2π. (236)
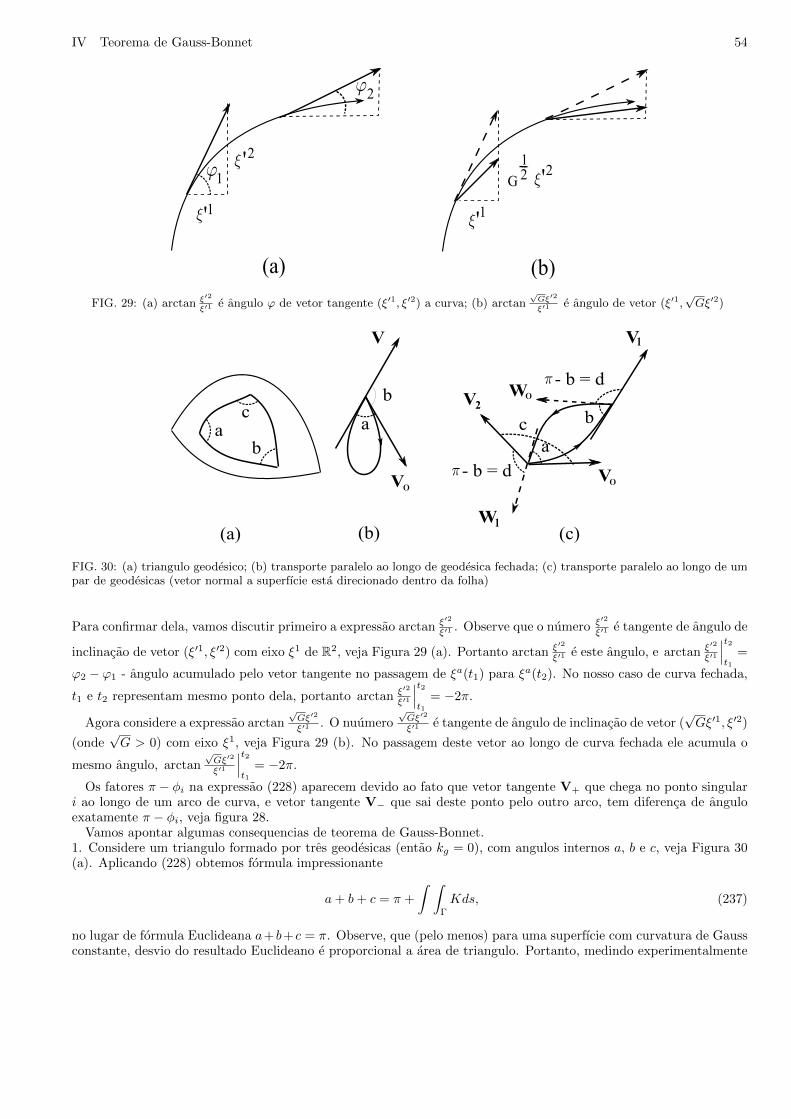
IV Teorema de Gauss-Bonnet 54
(a) (b)
2
11
'1
'2G
'1
2 '2
FIG. 29: (a) arctan ξ′2
ξ′1 e angulo ϕ de vetor tangente (ξ′1, ξ′2) a curva; (b) arctan√Gξ′2
ξ′1 e angulo de vetor (ξ′1,√Gξ′2)
(a) (b) (c)
ab
ca
b
V
0V- b = d
- b = d
ac b
V0
V1
V2
W
W0
1
FIG. 30: (a) triangulo geodesico; (b) transporte paralelo ao longo de geodesica fechada; (c) transporte paralelo ao longo de umpar de geodesicas (vetor normal a superfıcie esta direcionado dentro da folha)
Para confirmar dela, vamos discutir primeiro a expressao arctan ξ′2
ξ′1 . Observe que o numero ξ′2
ξ′1 e tangente de angulo de
inclinacao de vetor (ξ′1, ξ′2) com eixo ξ1 de R2, veja Figura 29 (a). Portanto arctan ξ′2
ξ′1 e este angulo, e arctan ξ′2
ξ′1
∣∣∣t2t1
=
ϕ2 − ϕ1 - angulo acumulado pelo vetor tangente no passagem de ξa(t1) para ξa(t2). No nosso caso de curva fechada,
t1 e t2 representam mesmo ponto dela, portanto arctan ξ′2
ξ′1
∣∣∣t2t1
= −2π.
Agora considere a expressao arctan√Gξ′2
ξ′1 . O nuumero√Gξ′2
ξ′1 e tangente de angulo de inclinacao de vetor (√Gξ′1, ξ′2)
(onde√G > 0) com eixo ξ1, veja Figura 29 (b). No passagem deste vetor ao longo de curva fechada ele acumula o
mesmo angulo, arctan√Gξ′2
ξ′1
∣∣∣t2t1
= −2π.
Os fatores π − φi na expressao (228) aparecem devido ao fato que vetor tangente V+ que chega no ponto singulari ao longo de um arco de curva, e vetor tangente V− que sai deste ponto pelo outro arco, tem diferenca de anguloexatamente π − φi, veja figura 28.
Vamos apontar algumas consequencias de teorema de Gauss-Bonnet.1. Considere um triangulo formado por tres geodesicas (entao kg = 0), com angulos internos a, b e c, veja Figura 30(a). Aplicando (228) obtemos formula impressionante
a+ b+ c = π +
∫ ∫Γ
Kds, (237)
no lugar de formula Euclideana a+b+c = π. Observe, que (pelo menos) para uma superfıcie com curvatura de Gaussconstante, desvio do resultado Euclideano e proporcional a area de triangulo. Portanto, medindo experimentalmente
IV Teorema de Gauss-Bonnet 55
a soma dos angulos de um triangulo grande, poderiamos verificar se a geometria do nosso mundo e diferente deEuclideana (foi Gauss mesmo quem primeiro fiz uma tentativa de verificar isto).2. Seja a nossa superfıcie admite uma geodesica fechada que obedece das condicoes de teorema de Gauss-Bonnet.Fazendo transporte paralelo de vetor tangente V0 ao longo dela (veja Figura 30 (b)), obtemos para angulo entre V0
e vetor resultante V: b = 2π −∫ ∫
ΓKds.
3. Considere duas geodesicas que ligam dois pontos, formando uma curva regular por duas partes, veja Figura 30(c). Considere transporte paralelo de vetor tangente V0 ao longo dela. Aplicando teorema de Gauss-Bonnet, obtemospara angulo entre V0 e vetor resultante V2: c =
∫ ∫ΓKds.
Exercıcio 25.1. Considere vetor tangente ao um dos lados de triangulo geodesico, e faca transporte paralelo dele aolongo de triangulo. Encontre expressao para o angulo entre vetor inicial e final.
INDEX
area, 22
parametrizacaonatural de curva, 9
superfıcieregular, 15
aplicacaoconforme, 26
autovalor, 47autovetor, 47
baseadaptada a curva, 9de Frenet, 9
binormal, 9
campovetorial, 28vetorial paralelo, 28
centrode curvatura, 14
cicloide, 14circunferencia, 6coeficientes
de segunda forma fundamental, 31de conexao, 3
coeficientes afim, 29coeficientes de conexao, 29comprimento de arco, 9comutador, 38condicao
de compatibilidade, 40de regularidade, 17
coordenadaconforme, 25de curva, 6de superfıcie, 16de vetor, 21
coordenadasde vetor, 3curvilineares, 2geodesicas, 51semigeodesicas, 50
curvade curvatura, 49assintotica, 49biregular, 12coordenada, 4geodesica, 33parametrizada, 7regular, 6
curvas-coordenadas, 17curvatura
de curva, 10de Gauss, 32, 42escalar, 39geodesica, 42media, 32normal, 42principal, 45
56
IV Index 57
derivada covariante, 28, 30difeomorfismo, 6diferencial de aplicacao, 23direcao
assintotica, 46principal, 45sobre superfıcie, 42
distancia, 35
equacaode Beltrami, 25de geodesica, 33, 45de geodesica em parametrizacao natural, 33parametrica de curva, 6parametrica de superfıcie, 16
equacoesde Gauss-Weingarten, 29de Peterson-Mainardi-Kodazzi, 50
espacotangente, 21
evoluta, 14evolvente
de circunferencia, 14de uma curva, 14
formulade Green no plano, 53
fator conforme, 25formula
de Euler, 48de Euler, 47
funcaode passagem, 16diferenciavel, 6escalar sobre suprfıcie, 32
funcoesde passagem, 2
funcional, 35
geometriaEuclideana, 23externa, 50interna, 50nao Euclideana, 23
helice, 14homeomorfismo, 6
indicatrizde curvatura, 48de Dupin, 48
isometria, 24
loxodromicas, 27
metrica, 3, 17Euclideana, 23inversa, 18
mapasobre curva, 6sobre superfıcie, 16
matrizde Jacobi, 2, 18
normal principal, 9
IV Index 58
operadorautoadjunto, 47
paraboloidecilındrico, 46elıptico, 46hiperbolico, 46
paraboloide osculador, 46parametrizacao
de curva, 6de superfıcie, 16
plano, 9, 19osculador de curva, 10tangente a superfıcie, 19
pontoelıptico, 47hiperboolico, 47parabolico, 47planar, 47singular, 6singular de superfıcie, 16umbılico, 47
primeira forma fundamental, 17, 22produto escalar, 21
em coordenadas locais, 21projecao estereografica, 25pseudoesfera, 14
raiode curvatura de curva, 14
representante de curva, 20reta, 6
coordenada, 4tangente, 8
sımbolos de Christoffel, 29segunda forma fundamental, 31, 32sistema
de coordenadas locais sobre curva, 6de coordinadas locais sobre superfıcie, 16
Superfıciegrafico, 19implıcita, 19parametrizada, 18
superfıcieconforme, 26isometrica, 24orientavel, 18orientada, 18
tensorde curvatura, 39de Ricci, 39de Rieman, 39
teoremade Rodrigues, 49de Bonnet, 49
Topologia induzida, 6, 15torcao de curva, 11tractriz, 14transformacao
de coordenadas de vetor, 21de derivada de vetor normal, 31de funcao escalar, 32

IV Index 59
de metrica, 18de metrica inversa, 18de sımbolos de Christoffel, 31de segunda forma fundamental, 31de tensor de Rieman, 39
transporte paralelo, 29, 30
variacao de funcional, 36vetor
tangente a curva, 8Vizinhanca, 6, 15







![Ambienta¸c˜ao `a Geometria Diferencial - lief.if.ufrgs.br · Cap´ıtulo 1 TOPOLOGIA 1.1 Elementos b´asicos – Referˆencias Trˆes Senhoras [1]; Abraham-Marsden [2]; Nash e Sen](https://static.fdocuments.in/doc/165x107/5b8b42827f8b9a50388d911e/ambientacao-a-geometria-diferencial-liefifufrgsbr-capitulo-1-topologia.jpg)








![Referências Bibliográficas - dbd.puc-rio.br€¦ · Referências Bibliográficas [1] DO CARMO, M. P. Geometria Diferencial de Curvas e Superfícies. SBM, 2010. [2] VELHO, L.;](https://static.fdocuments.in/doc/165x107/5afe371a7f8b9a434e8ec63f/referncias-bibliogrcas-dbdpuc-rio-referncias-bibliogrcas-1-do-carmo.jpg)
