Normal Gait
4
Searc O&P Library > Atlas of Limb Prosthetics Reproduced with permission from Bowker HK, Michael JW (eds): Atlas of Limb Prosthetics: Surgical, Prosthetic, and Rehabilitation Principles. Rosemont, IL, American Academy of Orthopedic Surgeons, edition 2, 1992, reprinted 2002. Much of the material in this text has been updated and published in Atlas of Amputations and Chapter 13 - Atlas of Limb Prosthetics: Surgical, Prosthetic, and Rehabilitation Principles Normal Gait Jacquelin Perry, M.D. Walking depends on the repeated performance by the limbs of a sequence of motions that simultaneously advances the body along the desired line of progres while also maintaining a stable weight-bearing post Effectiveness depends on free joint mobility and mu action that is selective in both timing and intensi Normal function is also optimally conservative of physiologic energy. Pathologic conditions alter the and efficiency of walking. The loss of some actions necessitates substitution of others if forward progression and stance stability are to be preserve Through a detailed knowledge of normal function and types of gait errors that the various pathologic conditions can introduce, the clinician becomes abl define the significant deficits and plan appropriat corrective measures. NORMAL GAIT Gait Cycle
Transcript of Normal Gait

Search
O&P Library > Atlas of Limb Prosthetics > Chapter 13
Reproduced with permission from Bowker HK, Michael
JW (eds): Atlas of Limb Prosthetics: Surgical, Prosthetic, and Rehabilitation Principles. Rosemont, IL, American Academy of Orthopedic Surgeons, edition 2, 1992, reprinted 2002.
Much of the material in this text has been updated and published in Atlas of Amputations and Limb Deficiencies: Surgical, Prosthetic, and Rehabilitation Principles (retitled third edition of Atlas of Limb Deficiencies), ©American Academy or
Chapter 13 - Atlas of Limb Prosthetics: Surgical, Prosthetic, and Rehabilitation Principles
Normal Gait
Jacquelin Perry, M.D.
Walking depends on the repeated performance by the lower limbs of a sequence of motions that simultaneously advances the body along the desired line of progression while also maintaining a stable weight-bearing posture. Effectiveness depends on free joint mobility and muscle action that is selective in both timing and intensity. Normal function is also optimally conservative of physiologic energy. Pathologic conditions alter the mode and efficiency of walking. The loss of some actions necessitates substitution of others if forward progression and stance stability are to be preserved. Through a detailed knowledge of normal function and the types of gait errors that the various pathologic conditions can introduce, the clinician becomes able to define the significant deficits and plan appropriate corrective measures.
NORMAL GAIT
Gait Cycle
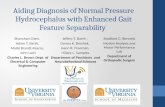
Each sequence of limb action (called a gait cycle) involves a period of weight-bearing (stance) and an interval of self-advancement (swing) (Fig 13-1.gait cycle approximately 60% of the time is spent in stance and 40% in swing.exact duration of these intervals varies with the walking speed. There also are minor differences among individuals.

Fig 13-1. Actions of the limb in stance and swing during each gait cycle. The vertical path of the body's center of gravity is compared with the horizontal (dotted line). (From Perry J.: Clin Orthop 1974; 102:18. Used by permission.)
The reciprocal action of the two limbs is timed to trade their weight-bearing responsibility during a period of double stance (i.e., when both feet are in contact with the ground) and usually involves the initial and terminal 10% intervals of stance. The middle 40% is a period of single stance (single-limb support). During this time the opposite limb is in swing.
Functional Elements
The three components of walking-progression, standing stability, and energy conservation-involve distinct functional patterns. These need to be understood for an appropriate interpretation of some of the limitations displayed by patients. Although for this description they will be separated, during walking all three action patterns are intertwined throughout each stride.
Progression
There are two main progressional forces:
1. 1.The primary one is forward fall of the body weight (in single stance as the ankle dorsiflexes beyond neutral and accelerates with heel rise.
2. The second, which is generated by the contralateral swinging limb (starts with the onset of single-limb support. This action is particularly important before the body is aligned for an effective forward fall.
The momentum generated by these two actions is optimally preserved at the onset of the next stance phase by floor contact with the heel. As the foot drops toward the floor, the pretibial muscles draw the tibia forward (Fig 13-4.
Orthopedic Surgeons. Click for more information about this text.
Funding for digitization of the Atlas of Limb Prosthetics was provided by the Northern Plains Chapter of the American Academy of Orthotists & Prosthetists
You can help expand theO&P Virtual Library
with atax-deductible contribution.

quadriceps ties the femur to the leg so that the thigh also advances (although at a slightly slower rate). Thus, throughout the stance period the heel, ankle, and forefoot serially serve as a rocker that allows the body to advance over the supporting foot (Fig 13-5.). For this to occur the foot must be appropriately positioned by the end of swing and controlled as weight is applied. Then, during the support phases there must be adequate passive mobility at the ankle. This necessitates both a free joint range and ability of the calf muscles to yield as they provide tibial stability.

Fig 13-5. Stance mobility. The heel, ankle, and forefoot rockers allow smooth progression of the trunk mass across the stationary foot. (From Perry J: Normal

Theoretically, weight-bearing stability of the limb is maximal when its three components (thigh, leg, and foot) are vertically aligned so that one is directly over the center of the other. If these segments were square blocks, there would be a broad shoulder to allow considerable tilting before balance was lost. Instead, the femur and tibia are tall narrow bones. Additionally, the articular surfaces are segments of a circle, so there are no restraining rims available in the sagittal plane and, consequently, no intrinsic stability. The skeletal architecture is designed for mobility. This means that other stabilizing mechanisms are needed. At the hip anteriorly and the knee posteriorly a strong ligament stabilizes one side of the joint. By using hyperextension to align body weight on the opposite side, the person is able to attain passive stability. No similar mechanism exists at the ankle or subtalar joints, however. Instead, here a free range of dorsiflexion-plantar flexion and in-version-eversion exists. Thus, only through direct muscular control is the tibia stabilized over the foot. Passive stability is further challenged by the fact that the foot does not provide equal areas of support anterior and posterior to the ankle axis. Posteriorly the weight-bearing segment of the heel is little more than 1 cm, for the significant factor is the rounded contour of the tuberosities and not the full length of the os calcis. By contrast, the anterior (forefoot) lever that extends to the weight-bearing surface of the metatarsal heads averages 10 cm in an adult. Thus, for optimum foot support (equal anterior and posterior leverages), the body weight line (vector) must be anterior to the

Energy Conservation
The basic measure of efficiency is energy expenditure per task performed. For walking, this is oxygen used per meter traveled. Oxygen is consumed as the muscles contract. Thus efficiency is improved by reducing the amount of muscular effort required to walk. This normally is accomplished by two mechanisms: momentum is substituted for muscle action wherever possible, and displacement of the body from the line of progression is minimized.
1. Optimum use of momentum occurs during the person's natural gait velocity. That motion pattern requires the least energy expenditure per meter traveled. Both a slower and a faster pace increase the energy cost.
2. Minimization of body displacement from the line of progression is accomplished by coordinating pelvic, knee, and ankle motion to keep the relative limb length fairly constant throughout stance.double stance, body height is lowest because the two limbs are diagonal. Conversely, the highest position occurs in the middle of single stance, when the supporting limb is vertical.
For a normal adult step length of 70 cm the height loss would be abrupt, and ankle

Fig 13-6. Ankle motion during the gait cycle ranges from 10 degrees of dorsiflexion to 20 degrees of plantar flexion. (Adapted from Perry J: Clin Orthop 1974; 102:18.)
Knee.-The knee also experiences two phases of flexion and extension in each gait cycle (Fig 13-7.). Beginning in full extension (or flexed 5 degrees), it rapidly flexes to 15 degrees. Then it progressively extends to neutral. With the onset of double stance, it again begins to flex. This action continues in swing to reach 60 degrees before extension is resumed.

Fig 13-8. Hip motion involves only 1 arc of flexion and 1 arc of extension. (Adapted from Perry J: Clin Orthop 1974; 102:18.)
PHASES OF GAIT
The functional significance of each joint's motion pattern at any point in the gait cycle is dependent on the total limb requirements for effective progression and stance stability. This is identified by subdividing the continuum of limb action according to the tasks that must be accomplished. The result is eight functional units. Each constitutes one phase of gait.
Normal events have customarily been used to designate the different gait phases. Although this was adequate for amputees, many other types of disability prevented the patients from accomplishing some of the key actions. The terms thus became meaningless. To avoid such confusion, a generic terminology was developed. Because it has proved universally applicable to normal, amputee, arthritic, and

Heel strike with the foot at a 25-degree angle to the floor is the normal occurrence. The ankle is in an approximately neutral position (perhaps plantar-flexed 3 degrees). The knee is extended between 0 and 5 degrees of flexion, and the hip is flexed 30 degrees.
At this moment the free drop of body weight creates a vertical vector passing through the heel that is anterior to both the knee and the hip. Three torques are generated: ankle plantar flexion, knee extension, and hip flexion (Fig 13-9.

Acceptance of body weight in a manner that ensures limb stability and still permits progression is the goal at this time.
As weight is dropped onto the limb, a heel rocker action is initiated that leads to two significant motion patterns. The action at the ankle precedes and contributes to that occurring at the knee.
Ankle.-After floor contact by the heel, the foot quickly drops into 10 degrees of plantar flexion in a controlled manner. The motion is initiated when body weight is applied to the foot at the dome of the talus while floor contact is still at the tip of the os calcis. An unstable lever results from differences in bone length between these points. Strong action by the pretibial muscles retards the terminal arc of ankle plantar flexion, so forefoot contact is gradual. Thus, heel strike is heard but no foot slap. This action dominates the first 6% to 8% of the gait cycle.
While these sagittal motions are occurring, there is also transverse rotation at the subtalar joint. The point of heel contact is lateral to the middle of the ankle joint (Fig 13-10.). This creates a valgus thrust on the subtalar joint. As the foot responds, support for the talus is reduced. The talus falls into internal rotation. The strong ankle ligaments carry the tibia and fibula with the talus so that the entire ankle joint turns inward.

Knee.-Flexion of the knee to 15 degrees is initiated by the heel rocker action. As the pretibial muscles contract to restrain ankle plantar flexion, they also draw the tibia forward. This is a rapid action, and it advances the leg faster than the thigh and trunk can follow. As a result the body weight line shifts posterior to the knee, and a flexion torque (moment) is induced (Fig 13-11.).
Fig 13-11. Loading response. Plantar flexion of the foot combined with knee

propulsion of the limb through the heel rocker advances the femur as well as the tibia.
Active muscular restraint of the hip flexion moments is provided primarily by the gluteus maximus and adductor magnus. Both these muscles markedly increase their activity after initial contact. Participation by the hamstrings is reduced because of their actions at the knee.
Midstance
Advancement of the body and limb over a stationary foot is the functional objective of this gait phase.
As the other foot is lifted for swing, a period of single-limb support begins. Maximum stability is gained by having the foot stationary and in total contact with the floor (heel and first and fifth metatarsal heads). Ankle rocker action allows progression to continue, and this occurs through residual momentum and that generated by the contralateral swinging limb. As body weight advances across the arch, the base of the vector moves from the heel to the forefoot. This alters vector alignment at the ankle, knee, and hip, with resulting changes in joint posture and muscle control (

Orthotics, ed 2. St Louis, Mosby-Year Book, 1985, p 82. Used by permission.)
Ankle.-At the onset of single stance the ankle is still slightly plantar-flexed (5 degrees). From this position there is gradual dorsiflexion. The basic arc is from -5 to +5, with 10 degrees of dorsiflexion being attained just as the heel rises to initiate terminal stance. Thus an ankle rocker is created for body progression. Allowing the tibia to advance beyond the neutral position so that body weight moves over the forefoot is the critical action.
As the body vector moves anterior to the ankle, a dorsiflexion moment is created that would accelerate the rate of limb advancement if it were not controlled. Judicious restraint is an essential component of knee stability.
The soleus responds by restraining the tibia's progression. Assistance by the gastrocnemius reduces the effort that the soleus must exert, but it also induces a flexion torque at the knee. While these two muscles are acting to avoid excessive tibial advancement, they are doing so in a yielding manner; thus the desired degree of ankle dorsiflexion is attained.
An available range and timely tibial restraint are the critical events during midstance.
Knee.-Knee flexion induced during the loading response increases slightly and reaches its maximum of 18 degrees just as single-limb support is initiated. Motion of the knee then reverses to progressive extension, which depends on the tibia's being actively restrained by the soleus so that the femur can advance at a relatively faster rate. At approximately the middle of the midstance phase the body vector moves

Fig 13-13. Midstance. Single-limb support places the body weight line medial to both the knee and the hip. (From Perry J: Normal and pathologic gait, in Atlas of Orthotics, ed 2. St Louis, Mosby-Year Book, 1985, p 83. Used by permission.)
Hip abductor muscle activity is intense throughout midstance while the extensors are quiet.
Terminal Stance
Forward fall to generate a propulsive force is the primary objective. Heel rise signifies the onset of this second phase of single stance. Now the forefoot serves as

respond vigorously and cease abruptly as the single-stance period is terminated and body weight is rapidly transferred to the other foot.
Fig 13-14. Terminal stance. The combination of having the vector on the forefoot and heel-off creates maximum demand on the calf muscles. (From Perry J: Normal and pathologic gait, in Atlas of Orthotics, ed 2. St Louis, Mosby-Year Book, 1985, p 83. Used by permission.)
Foot.-With body weight being applied at the ankle (talus) and supported by the forefoot, a strong dorsiflexion torque is generated through the midfoot. Stability is gained by inversion. This posture is initiated by the obliquity of metatarsal support.

longitudinal alignment provides. Passive arch support is gained from the plantar fascia, which is tensed as the MP joint dorsiflexes.
Compression from the toe flexors and tension from the plantar fascia also stabilize the MP joints so that the phalangeal bases can add to the base of support.
Knee.-With the tibia stabilized on the foot, forward alignment of body weight passively extends the knee. Maximum extension varies between 0 and -5 degrees. At the end of terminal stance when the vector is at the margin of MP support, the knee begins to flex. Body weight is rapidly falling toward the other limb. There is no quadriceps action at this time, for knee extension stability is gained from the body vector's continually being anterior to the knee joint axis.
Hip.-Passive extension of the hip joint continues as body weight advances beyond the supporting foot and the trunk remains erect. By the end of stance there are 10 degrees of hyperextension. The anterior joint structures are maximally stretched by falling body weight. This commonly stimulates the iliacus to provide a restraining force. There is no hip extensor activity during terminal stance. As body weight begins to fall toward the other limb, the hip abductors terminate their action, and passive abduction is induced.

Fig 13-15. Preswing. With the vector at the edge of the forefoot rocker the tibia falls forward and places the vector behind the knee to create a flexor moment. (From Perry J: Normal and pathologic gait, in Atlas of Orthotics, 2. St Louis, Mosby-Year Book, 1985, p 84. Used by permission.)
There is no flexor muscle action. The quadriceps (mainly the rectus femoris) may react briefly to restrain the rate of passive knee flexion if needed.
Hip.-Flexion of the hip joint is initiated with the recovery from hyperextension to neutral that occurs during this phase. The iliacus, often accompanied by the rectus femoris, is active.
Ankle and Foot.-There is rapid ankle plantar flexion to a 20-degree position, a passive event since all the significant musculature is relaxed at the time of contralateral foot contact. Only the flexor hallucis longus remains active. It sustains MP joint compression and restrains dorsiflexion while floor contact is maintained.

critical actions: flexion of both the hip and the knee (Fig 13-16.
Fig 13-16. Initial swing. The trailing posture of the tibia results in a downward alignment of the foot that creates a need for knee flexion to attain toe clearance. (From Perry J: Normal and pathologic gait, in Atlas of Orthotics, ed 2. St Louis, Mosby-Year Book, 1985, p 84. Used by permission.)
Hip.-From the neutral position attained at toe-off the hip rapidly flexes to 20 degrees. Although the iliacus is the major force advancing the thigh, the need for speed generates assistance from the sartorius, gracilis, and adductor longus.
Knee.-The amount of knee flexion required for toe clearance of the floor (60 degrees) is attained by adding 20 degrees to the 40-degree posture acquired during preswing. Despite the fact that this is a critical event, there is not a dominant flexion force. Momentum from the advancing thigh is supplemented by action of the short head of the biceps femoris and the sartorius and gracilis.

critical for floor clearance (Fig 13-17.).
Fig 13-17. Midswing. As the tibia becomes more vertical, active ankle dorsiflexion is required to avoid toe drag. (From Perry J: Normal and pathologic gait, in Atlas of Orthotics, ed 2. St Louis, Mosby-Year Book, 1985, p 85. Used by permission.)
Hip.-Maximum flexion to 30 degrees is reached by continued iliacus action.
Knee.-Relaxation of the flexor muscles allows the knee to extend passively. This accelerates advancement of the leg and foot. By the end of midswing, knee flexion (30 degrees) equals that of the hip, and the tibia is vertical.
Ankle.-Dorsiflexion to neutral is accomplished and then maintained. Verticality of the tibia continues the need for active control of the foot. The tibialis anterior and

Fig 13-18. Terminal swing. The limb is prepared for stance by deceleration of hip flexion, active knee extension, and continued dorsiflexion at the ankle. (From Perry J: Normal and pathologic gait, in Atlas of Orthotics, ed 2. St Louis, Mosby-Year Book, 1985, p 85. Used by permission.)
Hip.-The 30 degrees of flexion attained in midswing is maintained. For this purpose momentum supports limb weight while the hamstrings prevent further motion.three muscles-semimembranosus, semi-tendinosus, and biceps femoris long head-exhibit peak activity at this time.
Knee.-Because gravity must be opposed and only a brief time is available for this, extension of the knee to neutral (0 or -5 degrees) continues under active control. The quadriceps provides the needed extensor force. All heads remain active. Simultaneous contraction of the hamstrings to decelerate hip flexion also prevents hyperextension of the knee.
Ankle.-Continued neutral dorsiflexion is the basic posture, but the foot may drop into slight plantar flexion (3 to 5 degrees) at the end of the phase. The pretibial muscles tend to diminish their intensity of action as the semivertical position of the foot presents a less-demanding torque.
SUMMARY

The sequence of muscle action relates to three major tasks being accomplished during each gait cycle: weight acceptance, single-limb support, and limb advancement. Preparation of the limb for weight acceptance begins in terminal swing when the hip extensors and quadriceps are activated. Following initial floor contact, the loading response is an increase in the intensity of these hip and knee extensor muscles to stabilize the trunk and limb against the rapid transfer of body weight. To ensure knee stability, the hamstrings and single joint hip extensors exchange their intensities. Continuation of the swing-phase ankle dorsiflexor control provides a heel rocker for progression and shock-absorbing knee flexion. Ankle plantar flexion modulates the heel rocker to protect the quadriceps from overde-mand.
Stability for the phases of single-limb support (mid and terminal stance) depends almost entirely on timely and graded action of the soleus aided by the gastrocnemius. These muscles increase their intensity as progression increases the demand torque at the junction of foot and leg (the ankle). Knee and hip extensor stability is provided passively by body alignment. Activation of the hip abductors (which actually began in the loading response) ensures lateral stability of the pelvis and trunk on the supporting limb. Subtalar and midfoot stability is gained from the perimalleolar muscles. Progression of the limb and body over the stationary foot depends on graduated ankle dorsiflexion to advance the tibia. Further progression of the tibia is gained by heel rise and forward roll over the forefoot in terminal stance.
Preparation for limb advancement begins in the final phase of stance (preswing) as the limb is unloaded by the rapid transfer of body weight onto the other limb. The knee and hip are unlocked from their extended positions, and flexion is initiated. Active continuation of these events in initial swing and midswing lifts the toe to clear the floor and advances the limb. Dynamic dorsiflexion provides the necessary foot control. At the end of midswing, limb advancement ceases, and the preparations for stance begin.
References:
1. Dempster WT: Space Requirements of the Seated Operator: Geometrical, Kinematic, and Mechanical Aspects of the Body With Special Reference to the Limbs. Dayton, Ohio, Wright-Patterson Air Force Base U.S. Wright Air Development Center Technical Report 55-159.

Joint Surg [Am] 1964; 46:335.6. Perry J: Anatomy and biomechanics of the hindfoot. 7. Ralston HJ: Effects of immobilization of various body segments on the energy
cost of human locomotion. Proceedings of the 2nd IEA Conference, Dortmund, W Germany, 1964. Ergonomics 1965; (suppl):53.
8. Ralston HJ: Energy-speed relation and optimal speed during level walking. Z Angew Physiol 1958; 17:277.
9. Saunders JBCM, Inman VT, Eberhart HD: The major determinants in normal and pathological gait. J Bone Joint Surg [Am] 1953; 35:543.
10. Sutherland DH: An electromyographic study of the plantar flexors of the ankle in normal walking on the level. J Rone Joint Surg [Am]
11. Wright DG, Desai SM, Henderson WH: Action of the subtalar and ankle joint complex during the stance phase of walking. J Rone Joint Surg [Am] 46:361.
12. Perry J: Gait Analysis of Normal and Pathological Function.
Chapter 13 - Atlas of Limb Prosthetics: Surgical, Prosthetic, and Rehabilitation Principles
O&P Library > Atlas of Limb Prosthetics > Chapter 13
The O&P Virtual Library is a project of the Digital Resource Foundation for the Orthotics & Prosthetics Community. Contact Us | Contribute