
time series book - Time Series for Macroeconomics and Finance
1MaPhySto Workshop 9/04
Nonlinear Time Series Modeling Nonlinear Time Series Modeling
Richard A. DavisColorado State University
(http://www.stat.colostate.edu/~rdavis/lectures)
MaPhySto Workshop
Copenhagen
September 27 — 30, 2004

2MaPhySto Workshop 9/04
Part I: Introduction to Linear and Nonlinear Time Series1. Introduction2. Examples3. Linear processes
3.1 Preliminaries3.2 Wold Decomposition3.3 Reversibility3.4 Identifiability3.5 Linear tests3.6 Prediction
4. Allpass models4.1 Application of allpass
• Noninvertible MA model fitting• Microsoft• Muddy Creek• Seisomogram deconvolution
4.2 Estimation

3MaPhySto Workshop 9/04
Part II: Time Series Models in Finance1. Classification of white noise2. Examples3. “Stylized facts” concerning financial time series4. ARCH and GARCH models5. Forecasting with GARCH6. IGARCH7. Stochastic volatility models8. Regular variation and application to financial TS
8.1 univariate case8.2 multivariate case8.3 applications of multivariate regular variation8.4 application of multivariate RV equivalence8.5 examples8.6 Extremes for GARCH and SV models8.7 Summary of results for ACF of GARCH & SV models

4MaPhySto Workshop 9/04
Part III: Nonlinear and NonGaussian State-Space Models1. Introduction
1.1 Motivation examples1.2 Linear state-space models1.3 Generalized state-space models
2. Observation-driven models2.1 GLARMA models for TS of counts2.2 GLARMA extensions3.3 Other
3. Parameter-driven models3.1 Estimation3.2 Simulation and Application3.3 How good is the posterior approximation

5MaPhySto Workshop 9/04
Part IV: Structural Break Detection in Time Series1. Piecewise AR models2. Minimum description length (MDL)3. Genetic algorithm (GA)4. Simulation examples5. Applications (EEG and speech examples)6. Application to nonlinear models
6MaPhySto Workshop 9/04
References:
• Brockwell and Davis (1991). Time Series: Theory and Methods• Brockwell and Davis (2001). Introduction to Time Series and
Forecasting.• Durbin and Koopman (2001). Time Series Analysis by State-Space Models.• Embrechts, Klüppelberg, and Mikosch (1997). ModellingExtremal Events.• Fan and Yao (2001). Nonlinear Time Series.• Frances and van Dijk (2000). Nonlinear Time Series Models in Empirical Finance.• Harvey (1989). Forecasting, Structural Time Series Models and the Kalman Filter.• Rosenblatt (2000). Gaussian and Non-Gaussian Linear Time Series and Random Fields.• Subba-Rao and Gabr (1984). An Introduction to BispectralAnalysis and Bilinear Time Series Models.• Tong (2000). Nonlinear Time Series Models; a dynamical systems approach.

7MaPhySto Workshop 9/04
Why nonlinear time series models?
≡What are the limitations of linear time series models?
≡What key features in data cannot be captured by linear time series models?
What diagnostic tools (visual or statistical) suggest incompatibility of a linear model with the data?
1. Introduction

8MaPhySto Workshop 9/04
Example: Z1, . . . , Zn ~ IID(0,σ2)
Sample autocorrelation function (ACF):
)0(ˆ)(ˆ
)(ˆγγ
=ρhhZ where ))(()(ˆ ||
||
1
1 ZZZZnh ht
hn
tt −−=γ +
−
=
− ∑
is the sample autocovariance function (ACVF).
-2.
-1.
0.
1.
2.
0 40 80 120 160 200
Series
9MaPhySto Workshop 9/04
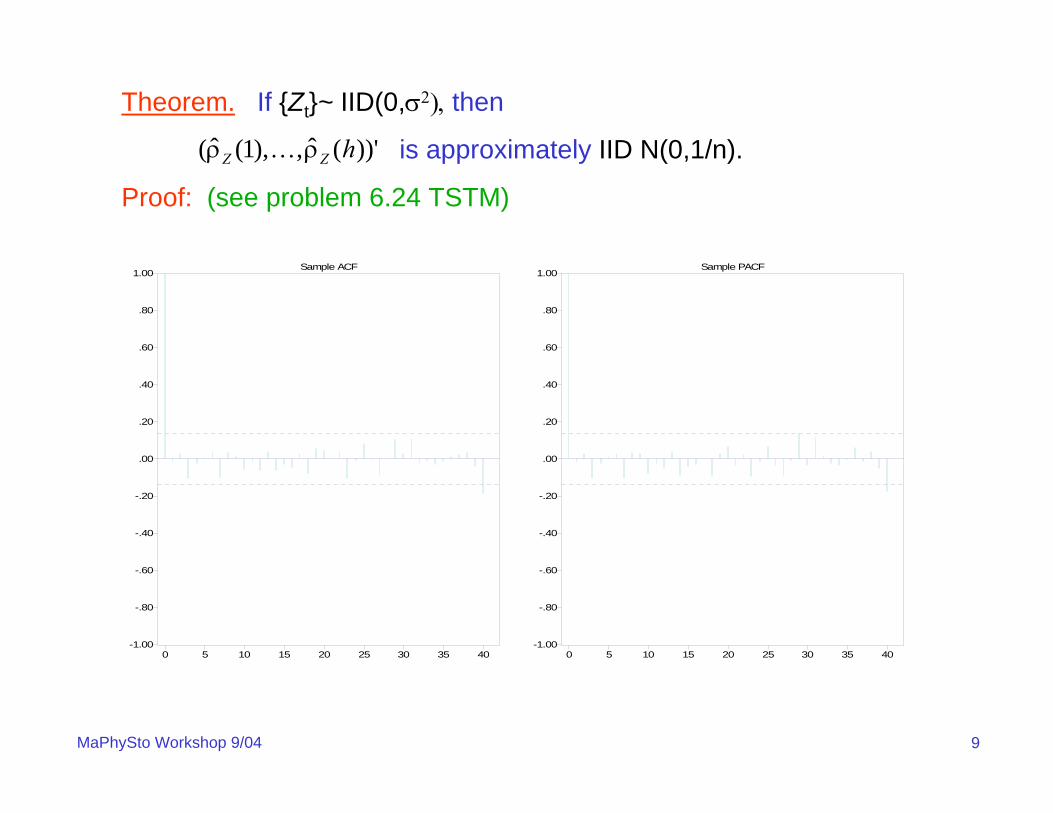
Theorem. If {Zt}~ IID(0,σ2), then
is approximately IID N(0,1/n).
Proof: (see problem 6.24 TSTM)
))'(ˆ,),1(ˆ( hZZ ρρ K
-1.00
-.80
-.60
-.40
-.20
.00
.20
.40
.60
.80
1.00
0 5 10 15 20 25 30 35 40
Sample ACF
-1.00
-.80
-.60
-.40
-.20
.00
.20
.40
.60
.80
1.00
0 5 10 15 20 25 30 35 40
Sample PACF

10MaPhySto Workshop 9/04
Cor. If {Zt}~ IID(0,σ2) and E|Z1|4 < ∞, then
is approximately IID N(0,1/n).))'(ˆ,),1(ˆ( 22 hZZ
ρρ K
-1.00
-.80
-.60
-.40
-.20
.00
.20
.40
.60
.80
1.00
0 5 10 15 20 25 30 35 40
Residual ACF: Abs values
-1.00
-.80
-.60
-.40
-.20
.00
.20
.40
.60
.80
1.00
0 5 10 15 20 25 30 35 40
Residual ACF: Squares
11MaPhySto Workshop 9/04
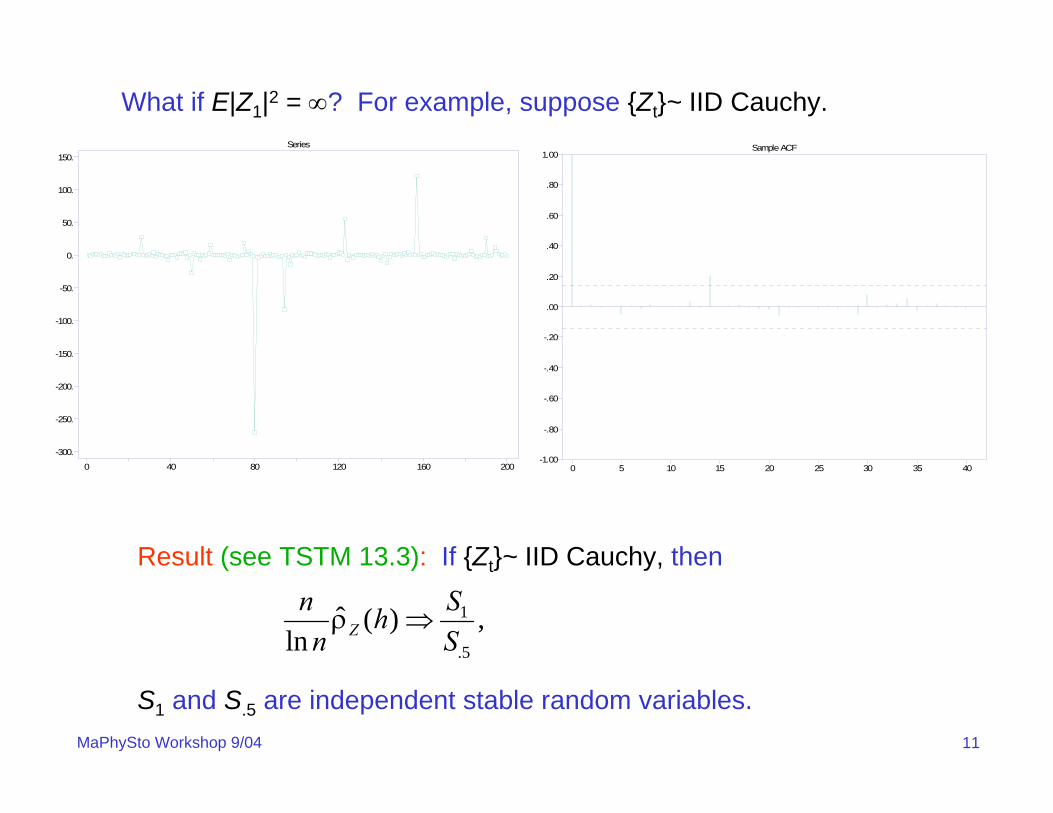
What if E|Z1|2 = ∞? For example, suppose {Zt}~ IID Cauchy.
-300.
-250.
-200.
-150.
-100.
-50.
0.
50.
100.
150.
0 40 80 120 160 200
Series
-1.00
-.80
-.60
-.40
-.20
.00
.20
.40
.60
.80
1.00
0 5 10 15 20 25 30 35 40
Sample ACF
Result (see TSTM 13.3): If {Zt}~ IID Cauchy, then
S1 and S.5 are independent stable random variables.
,)(ˆln 5.
1
SSh
nn
Z ⇒ρ ,)(ˆln 5.
1
SSh
nn
Z ⇒ρ
12MaPhySto Workshop 9/04
-1.00
-.80
-.60
-.40
-.20
.00
.20
.40
.60
.80
1.00
0 5 10 15 20 25 30 35 40
Residual ACF: Abs values
-1.00
-.80
-.60
-.40
-.20
.00
.20
.40
.60
.80
1.00
0 5 10 15 20 25 30 35 40
Residual ACF: Squares
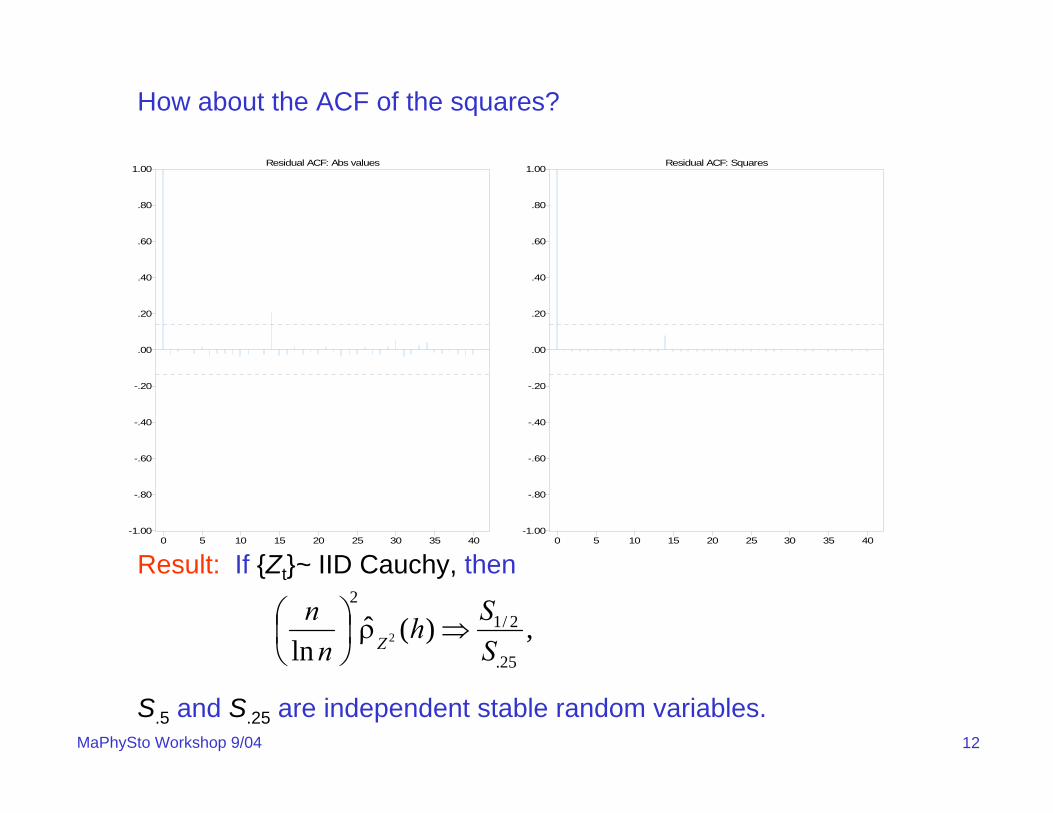
Result: If {Zt}~ IID Cauchy, then
S.5 and S.25 are independent stable random variables.
How about the ACF of the squares?
,)(ˆln 25.
2/12
2 SSh
nn
Z⇒ρ⎟
⎠⎞
⎜⎝⎛

13MaPhySto Workshop 9/04
Result: IID sequences {Zt} are time-reversible.
Application: If plot of time series does not look time- reversible, then it cannot be modeled as an IID sequence. Use the “flip and compare” inspection test!
Reversibility. The stationary sequence of random variables {Xt} is time-reversible if (X1, . . . ,Xn) =d (Xn, . . . ,X1).
-2.
-1.
0.
1.
2.
0 40 80 120 160 200
Series
-2.
-1.
0.
1.
2.
0 40 80 120 160 200
Series

14MaPhySto Workshop 9/04 -1.00
-.80
-.60
-.40
-.20
.00
.20
.40
.60
.80
1.00
0 5 10 15 20 25 30 35 40
Residual ACF: Abs values
-1.00
-.80
-.60
-.40
-.20
.00
.20
.40
.60
.80
1.00
0 5 10 15 20 25 30 35 40
Residual ACF: Squares
Reversibility. Does the following series look time-reversible?
-30.
-20.
-10.
0.
10.
20.
0 40 80 120 160 200
Series
-1.00
-.80
-.60
-.40
-.20
.00
.20
.40
.60
.80
1.00
0 5 10 15 20 25 30 35 40
Sample ACF

15MaPhySto Workshop 9/04
1962 1967 1972 1977 1982 1987 1992 1997
020
4060
8010
012
014
0
time
clos
ing
pric
eClosing Price for IBM 1/2/62-11/3/00
2. Examples

16MaPhySto Workshop 9/041962 1967 1972 1977 1982 1987 1992 1997
time
-20
-10
010
100*
log(
retu
rns)
Log returns for IBM 1/3/62-11/3/00 (blue=1961-1981)

17MaPhySto Workshop 9/04
0 10 20 30 40
Lag
0.0
0.2
0.4
0.6
0.8
1.0
AC
F(a) ACF of IBM (1st half)
0 10 20 30 40
Lag
0.0
0.2
0.4
0.6
0.8
1.0
AC
F
(b) ACF of IBM (2nd half)
Sample ACF IBM (a) 1962-1981, (b) 1982-2000
Remark: Both halves look like white noise?

18MaPhySto Workshop 9/04
Lag
AC
F
0 10 20 30 40
0.0
0.2
0.4
0.6
0.8
1.0
(a) ACF, Abs Values of IBM (1st half)
Lag
AC
F
0 10 20 30 40
0.0
0.2
0.4
0.6
0.8
1.0
(b) ACF, Abs Values of IBM (2nd half)
Sample ACF of abs values for IBM (a) 1961-1981, (b) 1982-2000
Remark: Series are not independent white noise?

19MaPhySto Workshop 9/04
0 10 20 30 40
Lag
0.0
0.2
0.4
0.6
0.8
1.0
AC
F
(a) ACF, Squares of IBM (1st half)
0 10 20 30 40
Lag
0.0
0.2
0.4
0.6
0.8
1.0
AC
F
(b) ACF, Squares of IBM (2nd half)
ACF of squares for IBM (a) 1961-1981, (b) 1982-2000
Remark: Series are not independent white noise? Try GARCH or a stochastic volatility model.

20MaPhySto Workshop 9/04
day
log
retu
rns
(exc
hang
e ra
tes)
0 200 400 600 800
-20
24
lag
AC
F
0 10 20 30 40
0.0
0.2
0.4
0.6
0.8
1.0
lag
AC
F of
squ
ares
0 10 20 30 40
0.0
0.2
0.4
0.6
0.8
1.0
lag
AC
F of
abs
val
ues
0 10 20 30 40
0.0
0.2
0.4
0.6
0.8
1.0
Example: Pound-Dollar Exchange Rates (Oct 1, 1981 – Jun 28, 1985; Koopman website)

21MaPhySto Workshop 9/04
Year 1990
••••••••••
•••••
•••••••••••••••••
•••••
•
••••••
••••••••••••
••••
•••••••••••
••••••••
•••••••••
•••
••
••••
••••••
•••••
••
•
•••••••••••••••••••••
••
•
•••••
•
••••
•••••••
••••
•
••••••••••••
•
••••••
•••••
•
•••
•
••••••
•••••••••
•
•••••••
•
•••••••••••••
••••••••••
••••••••••
••••••••••••
••••••
•••••
••••••••
••••••••••••
•••••••
•••••••••••
••••••••••••
•
•••••••••••••
•••••
••••••••••••
••••••••
••••••
••••
06
14Jan Feb Mar Apr May Jun Jul Aug Sep Oct Nov Dec
Year 1991
••••••
••••••••••••
•••••••••
••••••••
•••••
••
•••••
••••••
••••••
••••••
•••••••••
••
•••
••••••
•
•••••••
•
••••••
••••••••
••••••••••••••
•••••
•••••
•
•
•
•••
•••••••••
••••••••
••••••••
••••••••••••
•
•••••••
••••
••••••
•••••••••••
•••••
•••••••
•
••••••••••••
••••
••••••••••
•••••••••••••••••••••••••••
••••••••
•••••
•••••
••••••••••
•••••••
•••••••••••••
•••••
••••••••••
•••••••••••••
••••••••••
•••••••••
06
14
Jan Feb Mar Apr May Jun Jul Aug Sep Oct Nov Dec
Year 1992
•
•••••••••
••••••••••••••••••••
••••••••
•
••••••••••
••
•••••
••
••
••••••••••
••
•
••
•••••
•••••
••••••
•••••••
•••
••••
••••••••••
•••
•••••••••
•••••••••
••••••
••
•
••
•
•
••
•
•••••••
•
•••••••
••••
•
•••••
••••••
•••••••••
••••••••••••
••••••
•••••••••
••••
••••••••
•••
••••••••
••••••••
•••••••••••••
•••••
••••••
••••••••••
••••••••
•••••••
•••••••••
•••••••••
•
•••••••
•
••••••••
••••••••••••
••••••••
•••••
•••••••0
614
Jan Feb Mar Apr May Jun Jul Aug Sep Oct Nov Dec
Year 1993
••••••••••••
••••••••
•••••
•••••
•••••••••••
•••
••••
••
••••
••••
•
•
•••••••
•
•••••••••••
••
•••••••••
••••
••
••
••••••••
•••••••••
••••••••
•••••••••••
•
•••••••••••
••••
••••••
••
••••••
••
•••••
•••••••••••
•••••••••
•••••••
••••
••••••••••••
•••••••
•••••
••••••••
••••••
•••••••
•••••
•••••••
•••••
•••••
•••••
•••••••••
•
••••••••••••••••••••
••••
••••
•••••••
•••••••••••••••••••••
••••
•••••••••
••••••••••••0
614
Jan Feb Mar Apr May Jun Jul Aug Sep Oct Nov Dec
Example: Daily Asthma Presentations (1990:1993)
Remark: Usually marginal distribution of a linear process is continuous.

22MaPhySto Workshop 9/04
0 1000 2000 3000 4000 5000
1022
1024
1026
1028
distance (m)
bed
elev
atio
n
Muddy Creek: surveyed every 15.24 meters, total of 5456m; 358 measurements
Degree AICc
0 1455
1 294.3
2 251.3
3 47.1
4 34.0
5 35.5
4 34.0
Muddy Creek- tributary to Sun River in Central Montana

23MaPhySto Workshop 9/04
0 1000 2000 3000 4000 5000distance (m)
-0.5
0.0
0.5
resi
dual
s de
g =
4
0 100 200 300 400lag (m)
0.0
0.2
0.4
0.6
0.8
1.0
acf
0 100 200 300 400lag (m)
0.0
0.2
0.4
0.6
0.8
1.0
acf
Blue = sampleRed = model
Blue = sampleRed = model
Minimum AICc ARMA model: ARMA(1,1) Yt = .574 Yt-1 + εt – .311 εt-1, {εt}~WN(0,.0564)
Some theory:
• LS estimates of trend parameters are asymptotically efficient.
• LS estimates are asymptotically indepof cov parameter estimates.
Noncausal ARMA(1,1) model: Yt = 1.743 Yt-1 + εt – .311 εt-1
Muddy Creek: residuals from poly(d=4) fit

24MaPhySto Workshop 9/04
Summary of models fitted to Muddy Creek bed elevation:
Degree AICc
0 1455
1 294.3
2 251.3
3 47.1
4 34.0
5 35.5
ARMA AICc
(1,2) 59.67
(2,1) 26.98
(2,1) 26.30
(1,1) 7.12
(1,1) 2.78
(1,1) 4.68
Muddy Creek (cont)

25MaPhySto Workshop 9/04
• About half of the CO2 emitted by humans accumulates in the atomosphere
• Other half is absorbed by “sink” processes on land andin the oceans
NEE= (Rh + Ra) – GPP (carbon flux)
GPP = Gross Primary Production (photosysynthesis)
Rh = Heterotrophic (microbial) respiration
Ra = autotrophic (plant) respiration.
The NEE data from the Harvard Forest consists of hourly measurements. We will aggregate over the day and consider dailydata from Jan 1, 1992 to Dec 31, 2001.
Go to ITSM Demo
Example: NEE=Net Ecosystem Exchange in Harvard Forest
26MaPhySto Workshop 9/04
3.1 Preliminaries
Def: The stochastic process {Xt , t=0, ±1, ±2, . . .} defined on a probability space is called a discrete-time time series.
Def: {Xt} is stationary or weakly stationary if
i. E|Xt|2 < ∞ , for all t.
ii. EXt = m, for all t.
iii. Cov(Xt, Xt+h)=γ(h) depends on h only.
Def: {Xt} is strictly stationary if (X1, . . . ,Xn) =d (X1+h, . . . ,Xn+h) for all n ≥1 and h=0, ±1, ±2, …
Remarks:
i. SS + (E|Xt|2 < ∞) ⇒ weak stationarity
ii. WS ⇒ SS (think of an example)
iii. WS + Gaussian ⇒ SS (why?)
3. Linear Processes
27MaPhySto Workshop 9/04
Def: {Xt} is a Gaussian time series if (Xm, . . . ,Xn) is multivariate normal
for all integers m < n, i.e., all finite dimensional distributions are normal.
Remark: A Gaussian time series is completely determined by the mean function and covariance functions,
m(t) = EXt and γ(s,t) = Cov(Xs, Xt).
If follows that a Gaussian TS is stationary (SS or WS) if and only ifm(t) = m and γ(s,t) = γ(t-s) depends only on the time lag t-s.
3.1 Preliminaries (cont)

28MaPhySto Workshop 9/04
Def: {Xt} is a linear time series with mean 0 if
where {Zt} ~ WN(0,σ2) and
Important remark: As a reminder WN means uncorrelated random
variables and not necessarily independent noise nor independent
Gaussian noise.
Proposition: A linear TS is stationary with
i. EXt = 0, for all t.
ii. and
If {Zt} ~ IID(0,σ2), then the linear TS is strictly stationary.
∑∞
−∞=−ψ=
jjtjt ZX ,
∑∞
−∞=+ψψσ=γ
jhjjh 2)( ∑∑
∞
−∞=
∞
−∞=+ ψψψ=ρ
jj
jhjjh 2/)(
.2 ∞<ψ∑∞
−∞=jj
3.1 Preliminaries (cont)
29MaPhySto Workshop 9/04
Is the converse to the previous proposition true? That is, are allstationary processes linear?Answer: Almost.
3.2 Wold Decomposition (TSTM Section 5.7)
Example: SetXt = A cos(ωt) + B sin(ωt), ω∈(0,π),
where A,B ~ WN(0,σ2). Then {Xt} is stationary since• E Xt= 0,• γ(h) =σ2 cos(ωh)
Def: Let be the best linear predictor operator onto the linear spanof the observations Xn, Xn-1, . . . .For this example,
Such processes with this property are called deterministic.
)(~ ⋅nP
.)(~1 nnn XXP =−

30MaPhySto Workshop 9/04
The Wold Decomposition. If {Xt} is a nondeterministic stationary time series with mean zero, then
wherei. ψ0 = 1, Σ ψj
2 <∞.
ii. {Zt} ~ WN(0,σ2)
iii. cov(Zs,Vt) = 0 for all s and t
iv. for all t.
v. for all s and t.
vi. {Vt} is deterministic.
The sequences {Zt}, {Vt}, and {ψt} are unique and can be written as
,0
∑∞
=− +ψ=
jtjtjt VZX
ttt ZZP =)(~
tts VVP =)(~
. ),(/)( ),(~0
21 ∑
∞
=−−− ψ−==ψ−=
jjtjtttjttjtttt ZXVZEZXEXPXZ
3.2 Wold Decomposition (cont)

31MaPhySto Workshop 9/04
Remark. For many time series (in particular for all ARMA processes) thedeterministic component Vt is 0 for all t and the series is then said to bepurely nondeterministic.
Example. Let Xt = Ut + Y, where {Ut} ~ WN(0,σ2) and is independent of
Y~(0,τ2). Then, in this case, Zt = Ut and Vt = Y (see TSTM, problem5.24).
Remarks:• If {Xt} is purely nondeterministic, then {Xt} is a linear process. • Spectral distribution for nondeterministic processes has the form
FX = FU + FV, where which has spectral density∑∞
=−ψ=
0jjtjt ZU
∑∞
=
λλ ψπ
σ=ψ
πσ
=λ0
22
22
|)(|2
||2
)(j
iijj eef
3.2 Wold Decomposition (cont)

32MaPhySto Workshop 9/04
• If thenFX = FU + FV,
is the Lebesque decomposition of the spectral distribution function; FU is the absolutely continuous part and FV is the singular part.
Example. Let Xt = Ut + Y, where {Ut} ~ WN(0,σ2) and is independent of
Y~(0,τ2). Then)()(
2)( 0
22
λδτ+λπ
σ=λ dddFX
,0))(~( 21
2 >−=σ − ttt XPXE
Kolmogorov’s Formula.
.))(~( where,})(ln)2exp{(2 21
212ttt XPXEdf −
π
π−
− −=σλλππ=σ ∫
Clearly ∫π
π−
−∞>λλ>σ .)(ln iff 02 df
3.2 Wold Decomposition (cont)

33MaPhySto Workshop 9/04
Example (TSTM problem 5.23).
This process has a spectral density function but is deterministic!!
.sin1 ),,0(~} , 2⎟⎟⎠
⎞⎜⎜⎝
⎛⎟⎠⎞
⎜⎝⎛
π=ψτψ= ∑
∞
−∞=− j
jWN{ZZX jtj
jtjt
Example (see TSTM problem 5.20). Let
and set
It follows that and is the WD for {Xt}.a) If {εt}~IID N(0,σ2), is {Zt} IID? Answer?b) If {εt}~IID(0,σ2), is {Zt} IID? Answer?
),,0(~}{ ,2 21 τεε−ε= − WNX tttt
5.3
)(5.)2(5.25.
)5.1(
1
322
2110
1
∑
∑∞
=−
−−−−−
∞
=−
−
ε−ε=
+ε−ε+ε−ε+ε−ε==
−=
jjt
jt
tttttj
tjtj
tt
X
XBZ
L
),0(~}{ 2σWNZt 15. −−= ttt ZZX
3.2 Wold Decomposition (cont)

34MaPhySto Workshop 9/04
Remark: In this last example, the process {Zt} is called an allpassmodel of order 1. More on this type of process later.
Recall that the stationary time series {Xt} is time-reversible if (X1, . . . ,Xn) =d (Xn, . . . ,X1) for all n.
Go to ITSM Demo
3.2 Wold Decomposition (cont)
3.3 Reversibility

35MaPhySto Workshop 9/04
The stationary time series {Xt} is time-reversible if (X1, . . . ,Xn) =d (Xn, . . . ,X1) for all n.
Theorem (Breidt & Davis 1991). Consider the linear time series {Xt}
where ψ(z) ≠ ±zr ψ(z-1) for any integer r. Assume either
(a) Z0 has mean 0 and finite variance and {Xt} has a spectral density positive almost everywhere.
or(b) 1/ψ(z)=π(z)=Σjπjzj, the series converging absolutely in some annulus
D containing the unit circle andπ(B)Xt = ΣjπjXt-j = Zt.
Then {Xt} is time-reversible if and only if Z0 is Gaussian.
,~}{ , IIDZZX tj
jtjt ∑∞
−∞=−ψ=
3.3 Reversibility

36MaPhySto Workshop 9/04
Remark: The condition ψ(z) ≠ ±zr ψ(z-1) on the filter precludes the filterfrom being symmetric about one of the coefficients. In this case, the time series would be time-reversible for non-Gaussian noise. Forexample, consider the series
Here ψ(z)=1 - .5z + z2 = z2 (1 - .5 z-1 + z2)= z2 ψ(z-1) and the series istime-reversible.
Proof of Theorem: Clearly any stationary Gaussian time series is time-reversible (why?). So suppose Z0 is nonGaussian and assume (a). If{Xt} time-reversible, then
~}{ ,5. 21 IIDZZZZX ttttt −− +−=
.)(
)()(
1)(
111 ∑
∞
−∞=−−− =
ψψ
=ψ
=ψ
=j
jtjttdtt ZaZBBX
BX
BZ
3.3 Reversibility (cont)

37MaPhySto Workshop 9/04
The first equality takes a bit of argument and relies on the spectralrepresentation of {Xt} given by
where Z(λ) is a process of orthogonal increments (see TSTM, Chapter 4).It follows, by the assumptions on the spectral density of {Xt} that
is well defined. So
and, by the assumption on ψ(z), the rhs is a non-trivial sum. Note that
),(],(
λ= ∫ππ−
λdZeX itt
),()(
1)(
1
],(
λψ
=ψ ∫
ππ−
λλ± dZe
eX
Bit
it m
.)(
)(1 ∑
∞
−∞=−− =
ψψ
=j
jtjtdt ZaZBBZ
12∑∞
−∞=
=j
ja Why? The above relation is a characterization of a Gaussian distribution(see Kagan, Linnik, and Rao (1973).)
3.3 Reversibility (cont)

38MaPhySto Workshop 9/04
Example: Recall for the example
and non-normal, the Wold decomposition is given by
where
By previous result, {Zt} cannot be time-reversible and hence is not IID.
),,0(~}{ ,2 21 τεε−ε= − IIDX tttt
,5. 1−−= ttt ZZX
.5.31
∑∞
=−ε−ε=
jjt
jttZ
Remark: This theorem can be used to show identifiability of theparameters and noise sequence for an ARMA process.
3.3 Reversibility (cont)

39MaPhySto Workshop 9/04
Motivating example: The invertible MA(1) process
has a non-invertible MA(1) representation,
Question: Can the {εt} also be IID?
Answer: Only if the Zt are Gaussian.
If the Zt are Gaussian, then there is an identifiability problem,
give the same model.
,1|| ),,0(~}{ , 21 <θσθ+= − IIDZZZX tttt
.1|| ),,0(~}{ , 221
1 <θσθεεθ+ε= −− WNX tttt
,1|| ),,(),( 2212 <θσθθ↔σθ −
3.4 Identifiability

40MaPhySto Workshop 9/04
For ARMA processes {Xt} satisfying the recursions,
casuality and invertibility are typically assumed, i.e.,
By flipping roots of the AR and MA polynomials from outside the unit circleto inside the unit circle, there are approximately 2p+q equivalentARMA representations of Xt driven with noise that is white (not IID). Foreach of these equivalent representations, the noise is only IID in theGaussian case.
Bottom line: For nonGaussian ARMA, there is a distinction betweencausal and noncausal; and invertible and non-invertible models.
tt
tqtqttptptt
ZBXBIIDZZZZXXX
)()(),,0(~}{ , 2
1111
θ=φ
σθ+θ+=φ−−φ− −−−− LL
1. |z|for 0)( and 0)( ≤≠θ≠φ zz
3.4 Identifiability (cont)
41MaPhySto Workshop 9/04
Theorem (Cheng 1992): Suppose the linear time series
has a positive spectral density a.e. and can also be represented as
Then if {Xt} is nonGaussian, it follows that
for some positive constant c.
, ),,0(~}{ , 22 ∞<ψσψ= ∑∑∞
−∞=− j jt
jjtjt IIDZZX
. ),,0(~}{ , 22 ∞<ητη= ∑∑∞
−∞=− j jt
jjtjt IIDYYX
,1 ,00 tjjttt c
ηcZY +− ψ==
Proof of Theorem: As in the proof of the reversibility result, we can write
and )()(
)(1 ∑∑
∞
−∞=−
∞
−∞=− ==
ψη
=ψ
=j
jtjtj
jtjttt ZbYYaYBBX
BZ
3.4 Identifiability (cont)

42MaPhySto Workshop 9/04
Now let {Y(s,t)} ~IID, Y(s,t) =d Y1 and set
Clearly, {Ut} is IID with same distribution as Z1. Consequently,
Since
Which by applying Theorems 5.6.1 and 3.3.1 in Kagan, Linnik, and Rao(1973), the sum above is trivial, i.e., there exists integers m and n suchthat am and bn are the only two nonzero coefficients. It follows that
∑∞
∞=
=-s
st tsYaU ).,(
.),( 1 ∑ ∑∑∞
−∞=
∞
−∞=
∞
−∞=
==t
ss
ttt
td tsYabUbY
,122 =∑ ∑∞
−∞=
∞
−∞=ts
st ab
.1 , njn
jntnt bηZbY +− ψ==
3.4 Identifiability (cont)

43MaPhySto Workshop 9/04
Cumulants and Polyspectra. We cannot base tests for linearity onsecond moments. A direct approach is to consider moments of higherorder and corresponding generalizations of spectral analysis.
Suppose that {Xt} satisfies supt E|Xt|k < ∞ for some k ≥ 3 and
for all t0,t1, . . . , tj, h=0, and j =0, . . ., k-1.
)()(1010 hththtttt jj
XXXEXXXE +++= LL
kth order cumulant. Coefficient, Ck(r1, . . . , rk-1), of ikz1z2…zk in the Taylor series expansion about (0,0,…,0) of
)exp(ln),,(11211 −++ +++=χ
krtkrttk XizXizXizEzz LK
3.5 Linear Tests

44MaPhySto Workshop 9/04
( )))()((),(3 µ−µ−µ−= ++ strtt XXXEsrC
3rd order cumulant.
If
then we define the bispectral density or (3rd – order polyspectral density)To be the Fourier transform,
-π ≤ ω1, ω2 ≤ π.
∞<∑ ∑ |),(| 3 srCr s
,),( )2(
1),( 21
s32213
ω−ω−∞
−∞=
∞
−∞=∑ ∑π
=ωω isir
r
esrCf
3.5 Linear Tests (cont)

45MaPhySto Workshop 9/04
kth - order polyspectral density.
Provided
-π ≤ ω1, . . . , ωk−1 ≤ π. (See Rosenblatt (1985) Stationary Sequences and Random Fields for more details.)
,|),,(|1 12
11 ∞<∑ ∑∑−
−r r kkr krrC KL
,),,( )2(
1
:),,(
1111
1 2 1
111
11
−−
−
ω−−ω−∞
−∞=
∞
−∞=
∞
−∞=−−
−
∑ ∑ ∑π
=ωω
kk
k
irir
r r rkkk
kk
errC
f
LKL
K
3.5 Linear Tests (cont)

46MaPhySto Workshop 9/04
Applied to a linear process. If {Xt} has the Wold decomposition
with E|Zt|3 < ∞, EZt3 = η, and Σj |ψj| < ∞, then
where ψj := 0 for j < 0. Hence
),,0(~}{ , 2
0
σψ= ∑∞
=− IIDZZX t
jjtjt
sjrjj
jsrC ++
∞
−∞=
ψψψη= ∑),(3
).()()(4
),( 21212213
ω−ω−ω+ω ψψψπη
=ωω iiii eeef
3.5 Linear Tests (cont)

47MaPhySto Workshop 9/04
The spectral density of {Xt} is
Hence, defining
we find that
Testing for constancy of φ(⋅) thus provides a test for linearity of {Xt} (seeSubba Rao and Gabr (1980)).
.|)(|2
)( 22
ωψπ
σ=ω ief
,)()()(
|),(|),(2121
2213
21 ω+ωωωωω
=ωωφfff
f
.2
),( 6
2
21 πση
=ωωφ
3.5 Linear Tests (cont)

48MaPhySto Workshop 9/04
Gaussian linear process. If {Xt} is Gaussian, then EZ3=0, and the third
order cumulant is zero (why?). In fact Ck ≡ 0 for all k >2.
It follows that f3(ω1, ω2) ≡ 0 for all ω1, ω2 ∈[0,π]. A test for linear
Gaussianity can therefore be obtained by estimating f3(ω1,ω2) and
testing the hypothesis that f3 ≡ 0 (see Subba Rao and Gabr (1980)).
3.5 Linear Tests (cont)

49MaPhySto Workshop 9/04
Suppose {Xt} is a purely nondeterministic process with WD given by
3.6 Prediction
).,0(~}{ , 2
0
σψ= ∑∞
=− WNZZX t
jjtjt
Then
so that
)(~1 tttt XPXZ −−=
. ~1
1 ∑∞
=−− ψ=
jjtjtt ZXP
Question. When does the best linear predictor equal the best predictor?
That is, when does
? ),| (~211 K−−− = ttttt XXXEXP

50MaPhySto Workshop 9/04
3.6 Prediction (cont)
? ),| (~211 K−−− = ttttt XXXEXP
Answer. Need
or, equivalently,),,(~
211 K−−− σ⊥−= tttttt XXXPXZ
.0),,|( 21 =−− Kttt XXZE
That is, BLP = BP
if and only if {Zt} is a Martingale-difference sequence.
Def. {Zt} is a Martingale-difference sequence wrt a filtration Ft (an
increasing sequence of sigma fields) if E|Zt| < ∞ for all t and
a) Zt is Ft measurableb) E(Zt | Ft-1)=0 a.s.

51MaPhySto Workshop 9/04
3.6 Prediction (cont)Remarks.1) An IID sequence with mean zero is a MG difference sequence.2) A purely nondeterministic Gaussian process is a Gaussian linear
process. This follows by the Wold decomposition and the fact that the resulting {Zt} sequence must be IID N(0,σ2) .
Example (Whittle): Consider the noncausal AR(1) process given byXt = 2 Xt-1 + Zt ,
where {Zt}~IID P(Zt = -1) = P(Zt = 0)=.5. Iterating backwards in time, wefind that
).5.5.(5.
5.5.5.
5.5.
22
1
12
12
1
L
M
−−−−=
−−=
−=
++
++
−
ttt
ttt
ttt
ZZZ
ZZX
ZXX

52MaPhySto Workshop 9/04
3.6 Prediction (cont)
is a binary expansion of a uniform (0,1) random variable. Notice thatfrom Xt, we can find Xt+1, by lopping off the first term in the binaryexpansion. This operation is exactly,
Xt+1 = 2 Xt mod 12Xt , if Xt < .5,2Xt -1, if Xt > .5.
1*
13
*3
2
*2
*1
32
21
,222
)5.5.(5.
+++++
+++
−=+++=
−−−−=
ttttt
tttt
ZZZZZ
ZZZX
L
L
⎩⎨⎧
=
Properties:
53MaPhySto Workshop 9/04
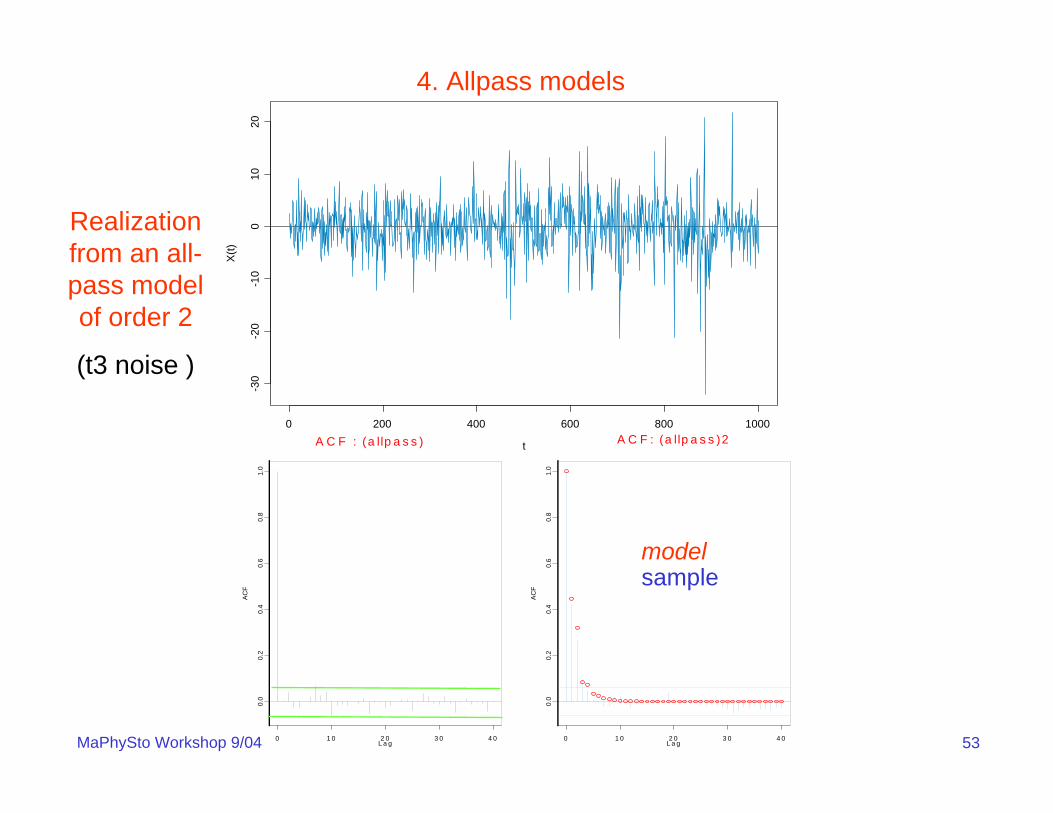
Realization from an all-pass model of order 2
(t3 noise )
0 1 0 2 0 3 0 4 0
0.0
0.2
0.4
0.6
0.8
1.0
L a g
AC
F
A C F : (a llp a s s )2
0 1 0 2 0 3 0 4 0
0.0
0.2
0.4
0.6
0.8
1.0
L a g
AC
F
A C F : (a llp a s s )
modelsample
t
X(t)
0 200 400 600 800 1000
-30
-20
-10
010
20
4. Allpass models

54MaPhySto Workshop 9/04
Causal AR polynomial: φ(z)=1−φ1z − − φpzp , φ(z) ≠ 0 for |z|≤1.
Define MA polynomial:
θ(z) = −zp φ(z−1)/φp = −(zp −φ1zp-1 − − φp)/ φp
≠ 0 for |z|≥1 (MA polynomial is non-invertible).
Model for data {Xt} : φ(B)Xt = θ(B) Zt , {Zt} ~ IID (non-Gaussian)
BkXt = Xt-k
Examples:
All-pass(1): Xt − φ Xt-1 = Zt − φ−1 Zt-1 , | φ | < 1.
All-pass(2): Xt − φ1 Xt-1 − φ2 Xt-2 = Zt + φ1/ φ2 Zt-1 − 1/ φ2 Zt-2
L
L
4. Allpass models (cont)

55MaPhySto Workshop 9/04
Properties:
• causal, non-invertible ARMA with MA representation
• uncorrelated (flat spectrum)
• zero mean
• data are dependent if noise is non-Gaussian
(e.g. Breidt & Davis 1991).
• squares and absolute values are correlated.
• Xt is heavy-tailed if noise is heavy-tailed.
πφσ
=π
σ
φφ
φ=ω
ω−
ωω−
22)(
)()( 2
22
22
22
pi
p
iip
Xe
eef
jt0j
jtp
1
t )()(
−
∞
=
−
∑ψ=φφ−
φ= ZZ
BBBX
p

56MaPhySto Workshop 9/04
Second-order moment techniques do not work
• least squares
• Gaussian likelihood
Higher-order cumulant methods
• Giannakis and Swami (1990)
• Chi and Kung (1995)
Non-Gaussian likelihood methods
• likelihood approximation assuming known density
• quasi-likelihood
Other
• LAD- least absolute deviation
• R-estimation (minimum dispersion)
Estimation for All-Pass Models

57MaPhySto Workshop 9/04
Noninvertible MA models with heavy tailed noise
Xt = Zt + θ1 Zt-1 + + θq Zt-q ,
a. {Zt} ~ IID nonnormal
b. θ(z) = 1 + θ1 z + + θq zq
No zeros inside the unit circle ⇒ invertible
Some zero(s) inside the unit circle ⇒ noninvertible
. . .
. . .
4.1 Application of Allpass models

58MaPhySto Workshop 9/04
Realizations of an invertible and noninvertible MA(2) processesModel: Xt = θ∗(B) Zt , {Zt} ~ IID(α = 1), whereθi(B) = (1 +1/2B)(1 + 1/3B) and θni(B) = (1 + 2B)(1 + 3B)
0 10 20 30 40
-40
-20
020
0 10 20 30 40
-300
-100
010
0
Lag
0 2 4 6 8 10
-0.2
0.2
0.6
1.0
ACF
Lag
0 2 4 6 8 10
-0.2
0.2
0.6
1.0
ACF

59MaPhySto Workshop 9/04
Application of all-pass to noninvertible MA model fitting
Suppose {Xt} follows the noninvertible MA model
Xt= θi(B) θni(B) Zt , {Zt} ~ IID.
Step 1: Let {Ut} be the residuals obtained by fitting a purely invertible MA model, i.e.,
So
Step 2: Fit a purely causal AP model to {Ut}
Z(B)~(B)U
). of version invertible theis ~( ,(B)U~(B)
(B)UˆX
tni
nit
ninitnii
tt
θθ
≈
θθθθ≈
θ=
.(B)Z(B)U~tnitni θ=θ

60MaPhySto Workshop 9/04
t
X(t)
0 200 400 600
2*10
56*
105
106
Volumes of Microsoft (MSFT) stock traded over 755 transaction days (6/3/96 to 5/28/99)

61MaPhySto Workshop 9/04
Analysis of MSFT:
Step 1: Log(volume) follows MA(4).
Xt =(1+.513B+.277B2+.270B3+.202B4) Ut (invertible MA(4))
Step 2: All-pass model of order 4 fitted to {Ut} using MLE (t-dist):
(Model using R-estimation is nearly the same.)
Conclude that {Xt} follows a noninvertible MA(4) which after refitting has
the form:
Xt =(1+1.34B+1.374B2+2.54B3+4.96B4) Zt , {Zt}~IID t(6.3)
6.26)ˆ( .)ZB960.43.116B1.135BB649.1(
)U02B2..131BB229..628B1(
t432
t432
=ν−++−=
−+−+−

62MaPhySto Workshop 9/04
Lag
AC
F
0 10 20 30 40
0.0
0.4
0.8
(a) ACF of Squares of Ut
Lag
AC
F
0 10 20 30 40
0.0
0.4
0.8
(b) ACF of Absolute Values of Ut
Lag
AC
F
0 10 20 30 40
0.0
0.4
0.8
(c) ACF of Squares of Zt
Lag
AC
F
0 10 20 30 40
0.0
0.4
0.8
(d) ACF of Absolute Values of Zt

63MaPhySto Workshop 9/04
Summary: Microsoft Trading Volume
Two-step fit of noninvertible MA(4):
• invertible MA(4): residuals not iid
• causal AP(4); residuals iid
Direct fit of purely noninvertible MA(4):
(1+1.34B+1.374B2+2.54B3+4.96B4)
For MCHP, invertible MA(4) fits.

64MaPhySto Workshop 9/04
0 1000 2000 3000 4000 5000distance (m)
-0.5
0.0
0.5
resi
dual
s de
g =
4
0 100 200 300 400lag (m)
0.0
0.2
0.4
0.6
0.8
1.0
acf
0 100 200 300 400lag (m)
0.0
0.2
0.4
0.6
0.8
1.0
acf
Blue = sampleRed = model
Blue = sampleRed = model
Minimum AICc ARMA model: ARMA(1,1)Yt = .574 Yt-1 + εt – .311 εt-1, {εt}~WN(0,.0564)
Muddy Creek: residuals from poly(d=4) fit

65MaPhySto Workshop 9/04
Causal ARMA(1,1) modelYt = .574 Yt-1
+ εt – .311 εt-1, {εt}~WN(0,.0564)
Noncausal ARMA(1,1) model: Yt = 1.743 Yt-1
+ εt – .311 εt-1
-1.00
-.80
-.60
-.40
-.20
.00
.20
.40
.60
.80
1.00
0 5 10 15 20 25 30 35 40
Residual ACF: Abs values
-1.00
-.80
-.60
-.40
-.20
.00
.20
.40
.60
.80
1.00
0 5 10 15 20 25 30 35 40
Residual ACF: Squares
-1.00
-.80
-.60
-.40
-.20
.00
.20
.40
.60
.80
1.00
0 5 10 15 20 25 30 35 40
Residual ACF: Abs values
-1.00
-.80
-.60
-.40
-.20
.00
.20
.40
.60
.80
1.00
0 5 10 15 20 25 30 35 40
Residual ACF: Squares

66MaPhySto Workshop 9/04
Example: Seismogram Deconvolution
Simulated water gun seismogram
• {βk} = wavelet sequence (Lii and Rosenblatt, 1988)
• {Zt} IID reflectivity sequence
0 200 400 600 800 1000
time
-500
0000
050
0000
0

67MaPhySto Workshop 9/04
Water Gun Seismogram Fit
Step 1: AICC suggests ARMA (12,13) fit
fit invertible ARMA(12,13) via Gaussian MLE
residuals not IID
Step 2: fit all-pass to residuals
order selected is r = 2.
residuals appear IID
Step 3: Conclude that {Xt} follows a non-invertible ARMA

68MaPhySto Workshop 9/04
0 5 10 15 20 25 30
lag (h)
0.0
0.2
0.4
0.6
0.8
1.0
acf
ACF of Wt2
0 5 10 15 20 25 30
lag (h)
0.0
0.2
0.4
0.6
0.8
1.0
acf
ACF of Zt2
69MaPhySto Workshop 9/04
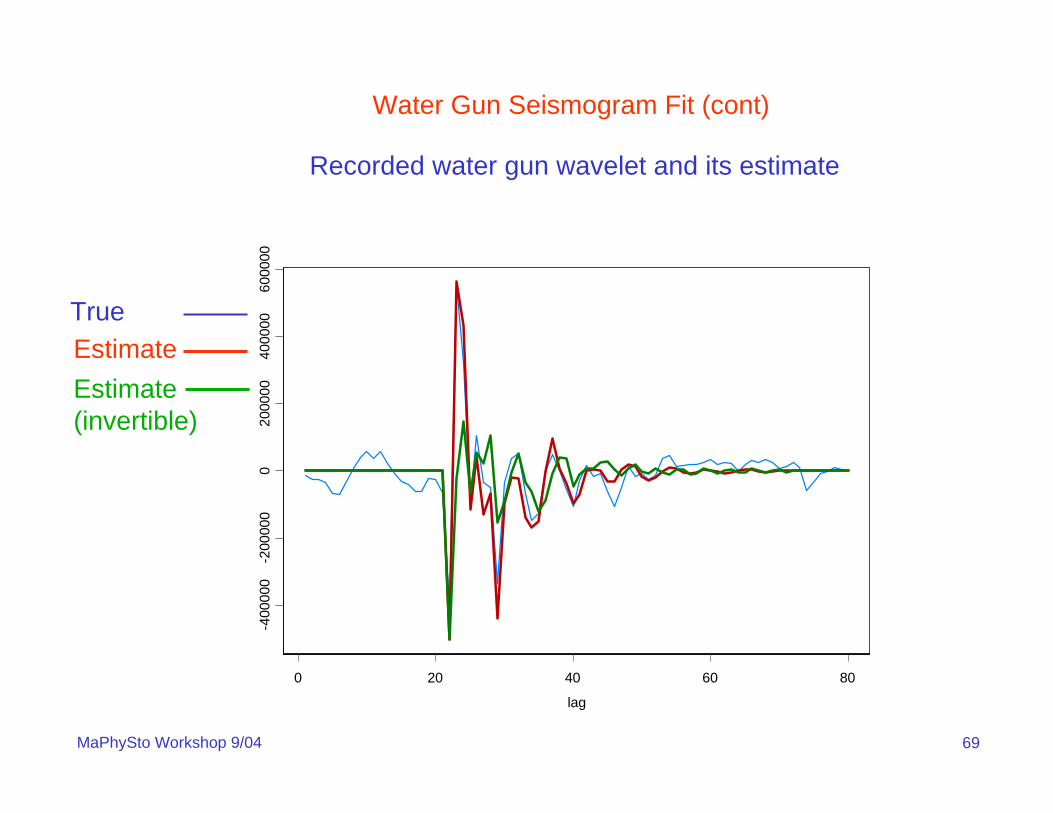
Water Gun Seismogram Fit (cont)
Recorded water gun wavelet and its estimate
0 20 40 60 80
-400
000
-200
000
020
0000
4000
0060
0000
lag
TrueEstimateEstimate(invertible)

70MaPhySto Workshop 9/04
Water Gun Seismogram Fit (cont)
Simulated reflectivity sequence and its estimates
71MaPhySto Workshop 9/04
4.2 Estimation for Allpass Models: approximating the likelihood
Data: (X1, . . ., Xn)
Model:
where φ0r is the last non-zero coefficient among the φ0j’s.
Noise:
where zt =Zt / φ0r.
More generally define,
Note: zt(φ0) is a close approximation to zt (initialization error)
rtpptpt
ptptt
ZZZ
XXX
00101
0101
/)( φφ−−φ−−
φ++φ=
+−−
−−
L
L
),( 01010101 ptptttpptpt XXXzzz −−+−− φ−−φ−−φ++φ= LL
⎩⎨⎧
+=φ−φ++φ++=
=+−
− .1,..., if ,)()()(,1,..., if ,0
)(11 pntXBzz
npntz
ttpptpt φφ
φL
72MaPhySto Workshop 9/04
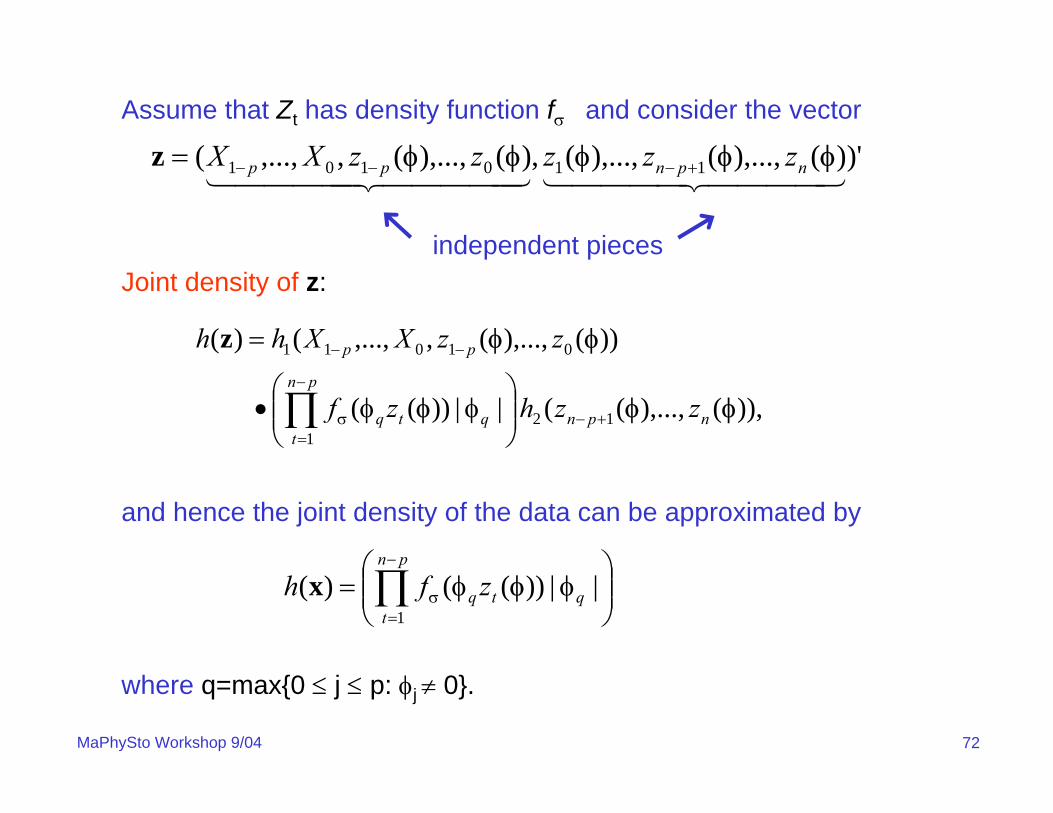
Assume that Zt has density function fσ and consider the vector
Joint density of z:
and hence the joint density of the data can be approximated by
where q=max{0 ≤ j ≤ p: φj ≠ 0}.
)')(),...,(),...,(,)(),...,(,,...,( 110101 4444 34444 2144444 344444 21φφφφφ npnpp zzzzzXX +−−−=z
independent pieces
)),(),...,(( ||))((
))(),...,(,,...,()(
121
01011
φφφ
φφ
npn
pn
tqtq
pp
zzhzf
zzXXhh
+−
−
=σ
−−
⎟⎟⎠
⎞⎜⎜⎝
⎛φφ•
=
∏
z
⎟⎟⎠
⎞⎜⎜⎝
⎛φφ= ∏
−
=σ
pn
tqtq zfh
1
||))(()( φx

73MaPhySto Workshop 9/04
Log-likelihood:
where fσ(z)= σ−1 f(z/σ).
Least absolute deviations: choose Laplace density
and log-likelihood becomes
Concentrated Laplacian likelihood
Maximizing l(φ) is equivalent to minimizing the absolute deviations
))((ln|)|/ln()(),(1
1 φφ ∑−
=
− φσ+φσ−−=σpn
ttqq zfpnL
|)|2exp(2
1)( zzf −=
||/ ,/|)(|2ln)(constant1
q
pn
ttzpn φσ=κκ−κ−− ∑
−
=
φ
|)(|ln)(constant)(1
φφ ∑−
=
−−=pn
ttzpnl
.|)(|)(1
n φφ ∑−
=
=pn
ttzm

74MaPhySto Workshop 9/04
Assumptions for MLE
Assume {Zt} iid fσ(z)=σ−1f(σ−1z) with
• σ a scale parameter
• mean 0, variance σ2
• further smoothness assumptions (integrability,symmetry, etc.) on f
• Fisher information:
Results
Let γ(h) = ACVF of AR model with AR poly φ0(.) and
dzzfzfI )(/))('(~ 22 ∫−σ=
p1kj,k)]-j([ =γ=Γp
))1~(2
1,0() ˆ( 1220MLE
−Γσ−σ
→− p
D
INn φφ

75MaPhySto Workshop 9/04
Further comments on MLE
Let α=(φ1, . . . , φp, σ /|φp|, β1, . . . , βq), where β1, . . . , βq are
the parameters of pdf f.
Set
(Fisher Information)
{ }
dzzfzfzf
dzzfzfzfz
dzzfzfz
dzzfzf
T
f
p
p
0
0
0
0
00
0
0
0
0
00
00
ββ
ββ
ββ
ββ
ββ
ββ
ββ
∂∂
∂∂
=
∂∂
α−=
−α=
σ=
∫
∫
∫∫
−+
−+
−
);();();(
1)(I
);();();('L
1);(/));('(K
);(/));('(I
11,0
2221,0
220

76MaPhySto Workshop 9/04
Under smoothness conditions on f wrt β1, . . . , βq we have
where
Note: is asymptotically independent of and
),,0() ˆ( 10MLE
−∑→− NnD
αα
⎥⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢⎢
⎣
⎡
−−−−−−
Γσ−σ
=∑−−−−−
−−−−−
−
−
11111
11111
1220
1
)'ˆ(ˆ)'ˆ()'ˆ('ˆ)'ˆ(
)1ˆ(21
LKLIKLLKLILKLILKLILK
I
ff
ff
p
00
00
ˆMLEφ ˆ MLE1,p+α ˆ
MLEβ

77MaPhySto Workshop 9/04
Asymptotic Covariance Matrix
• For LS estimators of AR(p):
• For LAD estimators of AR(p):
• For LAD estimators of AP(p):
• For MLE estimators of AP(p):
),0() ˆ( 120LS
−Γσ→− p
DNn φφ
))0(4
1,0() ˆ( 12220LAD
−Γσσ
→− p
D
fNn φφ
))1ˆ(2
1,0() ˆ( 1220MLE
−Γσ−σ
→− p
D
INn φφ
)|)|)0(2(2
|)(|Var,0() ˆ( 122
12
10LAD
−
σ
Γσ−σ
→− p
D
ZEfZNn φφ

78MaPhySto Workshop 9/04
Laplace: (LAD=MLE)
Students tν, ν >2:
LAD:
MLE:
Student’s t3:
LAD: .7337
MLE: 0.5
ARE: .7337/.5=1.4674
)1ˆ(21
21
|)|)0(2(2|)(|Var
221
21
−σ==
−σ σ IZEfZ
))2/)1(()2(4)2/()1(()2/)1((8
)2( 2222 +νΓ−ν−νΓ−νπ
+νΓ−ν
12)3)(2(
)1ˆ(21
2
+ν−ν=
−σ I

79MaPhySto Workshop 9/04
R-Estimation:
Minimize the objective function
where {z(t)(φ)} are the ordered {zt(φ)}, and the weight function ϕ
satisfies:
• ϕ is differentiable and nondecreasing on (0,1)
• ϕ´ is uniformly continuous
• ϕ(x) = −ϕ(1−x)
Remarks:
•
• For LAD, take
)(1
( )(1t
φφ) t
pn
zpntS ∑
−
=⎟⎟⎠
⎞⎜⎜⎝
⎛+−
ϕ=
)(1
((1t
φφ)
φ) t
pnt zpn
RS ∑−
=⎟⎟⎠
⎞⎜⎜⎝
⎛+−
ϕ=
1.x1/2 1,
1/2,x0 1,-)(
⎩⎨⎧
<<<<
=ϕ x

80MaPhySto Workshop 9/04
Assumptions for R-estimation
Assume {Zt} iid with density function f (distr F)
• mean 0, variance σ2
Assume weight function ϕ is nondecreasing and continuouslydifferentiable with ϕ(x) = −ϕ(1−x)
Results
Set
If then
∫∫∫ ϕ=ϕ=ϕ= −−1
0
11
0
11
0
2 )('))((L~ ,)()(K~ ,)(J~ dsssFfdsssFdss
))~~(2
~~,0() ˆ( 12
22
22
0R−Γσ
−σ−σ
→− p
D
KLKJNn φφ
,~~2 KL >σ

81MaPhySto Workshop 9/04
Further comments on R-estimation
ϕ(x) = x−1/2 is called the Wilcoxon weight function
By formally choosing
we obtain
That is R = LAD, asymptotically.
The R-estimation objective function is smoother than the
LAD-objective function and hence easier to minimize.
1.x1/2 1,
1/2,x0 1,-)(
⎩⎨⎧
<<<<
=ϕ x
.|)|)0(2(2
|)(|Var)~~(2
~~12
21
2112
22
22−
σ
− Γσ−σ
=Γσ−σ
−σpp ZEf
ZKLKJ

82MaPhySto Workshop 9/04phi
-0.5 0.0 0.5
22.0
22.5
23.0
23.5
24.0
24.5
Objective Functions
R-estimation
LAD

83MaPhySto Workshop 9/04
Summary of asymptotics
Maximum likelihood:
R-estimation
Least absolute deviations:
))1~(2
1,0() ˆ( 1220MLE
−Γσ−σ
→− p
D
INn φφ
)|)|)0(2(2
|)(|Var,0() ˆ( 122
12
10LAD
−
σ
Γσ−σ
→− p
D
ZEfZNn φφ
))~~(2
~~,0() ˆ( 12
22
22
0R−Γσ
−σ−σ
→− p
D
KLKJNn φφ
84MaPhySto Workshop 9/04
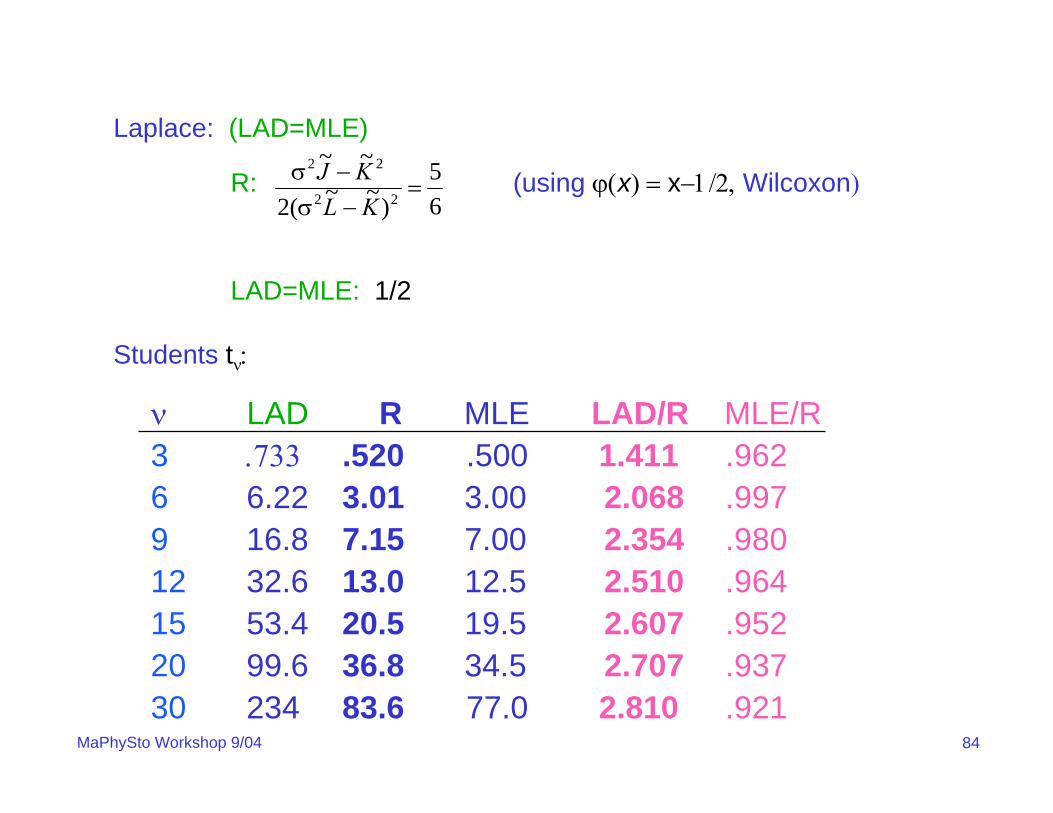
Laplace: (LAD=MLE)
R: (using ϕ(x) = x−1/2, Wilcoxon)
LAD=MLE: 1/2
Students tν:
65
)~~(2
~~22
22
=−σ
−σKLKJ
ν LAD R MLE LAD/R MLE/R3 .733 .520 .500 1.411 .9626 6.22 3.01 3.00 2.068 .9979 16.8 7.15 7.00 2.354 .98012 32.6 13.0 12.5 2.510 .96415 53.4 20.5 19.5 2.607 .95220 99.6 36.8 34.5 2.707 .93730 234 83.6 77.0 2.810 .921

85MaPhySto Workshop 9/04
Central Limit Theorem (R-estimation)
• Think of u = n1/2(φ−φ0) as an element of RRp
• Define
where Rt(φ) is the rank of zt(φ) among z1(φ), . . ., zn-p(φ).
• Then Sn(u) → S(u) in distribution on C(RRp), where
• Hence,
,)()1) ((- )()
1) (()(
10
0
1
1/2-0
-1/20 ∑∑
−
=
−
=⎟⎟⎠
⎞⎜⎜⎝
⎛+−
ϕ⎟⎟⎠
⎞⎜⎜⎝
⎛+
+−+
ϕ=pn
tt
tpn
tt
tn z
pnRnz
pnnRS φ
φφ
φ uuu
),||)~~(2 ,(~ ,'')~~(||)( 220
222210 prpr KJNKLS Γσφ−σ+Γσ−σφ= −−−− 0NNuuuu
)||)~~(2
~~,(~
)~~(2||
)(minarg)ˆ()(minarg
122
022
2212
20
02/1
−− Γσφ−σ
−σΓσ
−σφ
−=
→−=
pr
pr
D
Rn
KLKJN
KL
SnS
0N
uu φφ

86MaPhySto Workshop 9/04
Main ideas (R-estimation)
• Define
where Fz is the df of zt.
• Using a Taylor series, we have
• Also,
• Hence
,)())((- )())(()(~1
01
1/2-0 ∑∑
−
=
−
=
ϕ+ϕ=pn
tttz
pn
tttzn zzFnzzFS φφ uu
uuNu
uuuu
prD
pn
t
ttz
pn
t
ttzn
K
zzFnzzFnS
Γσφ−→
⎟⎟⎠
⎞⎜⎜⎝
⎛∂∂
∂ϕ+⎟⎟
⎠
⎞⎜⎜⎝
⎛∂
∂ϕ
−−
−
=
−−
=∑∑
210
1
02
1-1
1
01/2-
||~''
')())(('2 )())(('~)(~
φφφ
φφ
).1(||/~')(~)( 022
prpnn oLSS +φΓσσ=− − uuuu
).||)~~(2 ,(~ ,'')~~(||)( 220
222210 prprDn KJNKLS Γσφ−σ+Γσ−σφ→ −−−− 0NNuuuu

87MaPhySto Workshop 9/04
Order Selection:
Partial ACF From the previous result, if true model is of order r and fitted
model is of order p > r, then
where is the pth element of .
Procedure:
1. Fit high order (P-th order), obtain residuals and estimate scalar,
by empirical moments of residuals and density estimates.
)|)|)0(2(2
|)(|Var,0(ˆ2
12
1,
2/1
ZEfZNn LADp −σ
→φσ
LADp,φ LADφ
21
212
|)|)0(2(2|)(|VarZEf
Z−σ
=θσ

88MaPhySto Workshop 9/04
2. Fit AP models of order p=1,2, . . . , P via LAD and obtain p-th coefficient
for each.
3. Choose model order r as the smallest order beyond which the estimated
coefficients are statistically insignificant.
Note: Can replace with if using MLE. In this case
for p > r
pp,φ
pp,φ MLE,ˆpφ
).)1ˆ(2
1,0(ˆ2,
2/1
−σ→φ
INn MLEp

89MaPhySto Workshop 9/04
AIC: 2p or not 2p?
• An approximately unbiased estimate of the Kullback-Leiber index of fitted
to true model:
• Penalty term for Laplace case:
• Penalty term can be estimated from the data.
pZEf
ZEfZLpAIC X ⎟⎟
⎠
⎞⎜⎜⎝
⎛−
σ−σ
+κ−= σ
σ
1||)0(2
|)|)0(2(|)(|Var)ˆ,ˆ(2:)(
1
2
21
21φ
ppZEf
ZEfZ
=⎟⎟⎠
⎞⎜⎜⎝
⎛−
σ−σ
σ
σ
1||)0(2
|)|)0(2(|)(|Var
1
2
21
21

90MaPhySto Workshop 9/04
Sample realization of all-pass of order 2
t
X(t)
0 100 200 300 400 500
-40
-20
020
(a) Data From Allpass Model
Lag
AC
F
0 10 20 30 40
0.0
0.2
0.4
0.6
0.8
1.0
(b) ACF of Allpass Data
Lag
AC
F
0 10 20 30 40
0.0
0.2
0.4
0.6
0.8
1.0
(c) ACF of Squares
Lag
AC
F
0 10 20 30 40
0.0
0.2
0.4
0.6
0.8
1.0
(d) ACF of Absolute Values

91MaPhySto Workshop 9/04
Simulation results:
• 1000 replicates of all-pass models
• model order parameter value
1 φ1 =.5
2 φ1=.3, φ2=.4
• noise distribution is t with 3 d.f.
• sample sizes n=500, 5000
• estimation method is LAD

92MaPhySto Workshop 9/04
To guard against being trapped in local minima, we adopted the following strategy.
• 250 random starting values were chosen at random. For model of order p, k-th starting value was computed recursively as follows:
1. Draw iid uniform (-1,1).2. For j=2, …, p, compute
• Select top 10 based on minimum function evaluation.
• Run Hooke and Jeeves with each of the 10 starting values and choose best optimized value.
)()(22
)(11 ,...,, k
ppkk φφφ
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
φ
φφ−
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
φ
φ=
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
φ
φ
−
−−
−−
−
−)(
1,1
)(1,1
)(
)(1,1
)(1,1
)(1,
)(1
kj
kjj
kjj
kjj
kj
kjj
kj
MMM
93MaPhySto Workshop 9/04
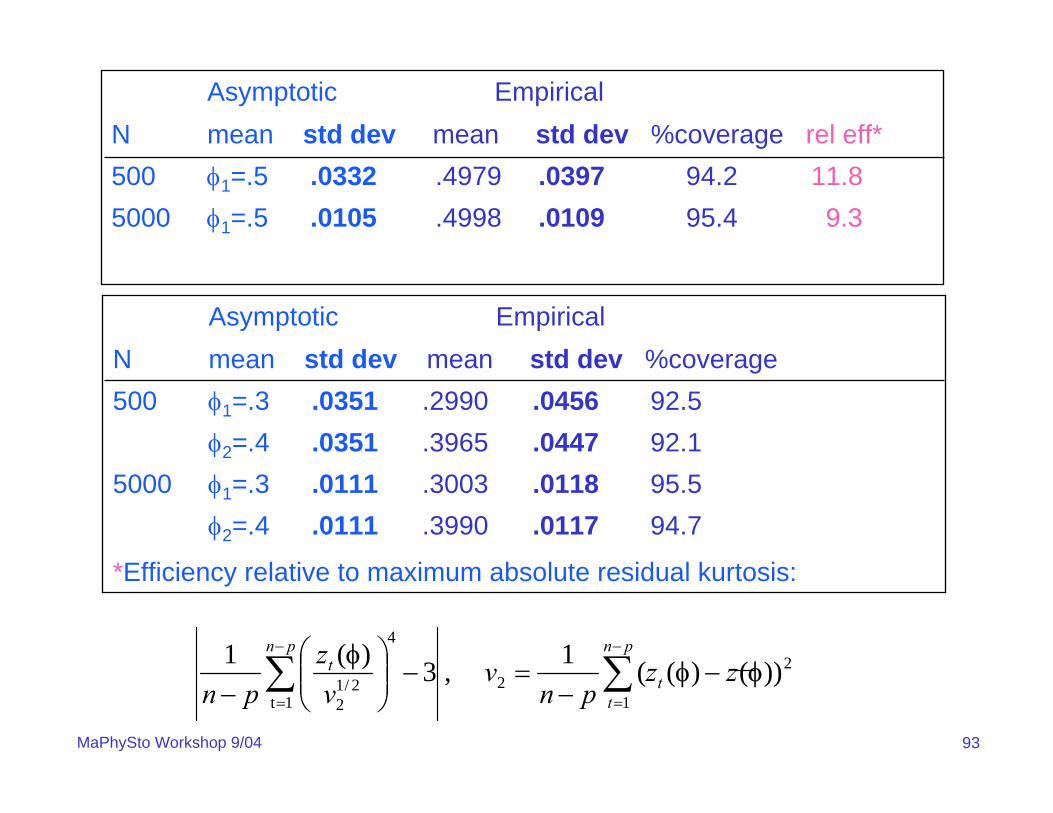
Asymptotic EmpiricalN mean std dev mean std dev %coverage rel eff*500 φ1=.5 .0332 .4979 .0397 94.2 11.85000 φ1=.5 .0105 .4998 .0109 95.4 9.3
Asymptotic EmpiricalN mean std dev mean std dev %coverage500 φ1=.3 .0351 .2990 .0456 92.5
φ2=.4 .0351 .3965 .0447 92.15000 φ1=.3 .0111 .3003 .0118 95.5
φ2=.4 .0111 .3990 .0117 94.7
*Efficiency relative to maximum absolute residual kurtosis:
2
12
1t
4
2/12
))()((1 , 3)(1φφ
φ zzpn
vvz
pn t
pn
t
pnt −
−=−⎟⎟
⎠
⎞⎜⎜⎝
⎛− ∑∑
−
=
−
=

94MaPhySto Workshop 9/04
Empirical Empirical LADN mean std dev mean std dev500 φ1=.5 .4978 .0315 .4979 .03975000 φ1=.5 .4997 .0094 .4998 .0109500 φ1=.3 .2988 .0374 .2990 .0456
φ2=.4 .3957 .0360 .3965 .04475000 φ1=.3 .3007 .0101 .3003 .0118
φ2=.4 .3993 .0104 .3990 .0117
R-Estimator: Minimize the objective fcn
where {z(t)(φ)} are the ordered {zt(φ)}.
)(21
1( )(
1tφφ) t
pn
zpntS ∑
−
=⎟⎟⎠
⎞⎜⎜⎝
⎛−
+−=


















