Stability Analysis of Nonlinear Systems Using Lyapunov Theory – II

3-5 Julho Ciência 2017 , Lisbon
Nonlinear Systems: An Introduction to Lyapunov Stability Theory
Antonio Pascoal
Modelação e Simulação, 2017-2018

Linear versus Nonlinear Control
Nonlinear Plant
u y
Linearbasedcontrollaws
- Lack of global stability and performance results
+ Good engineering intuition for linear designs (local stability and performance)
- Poor physical intuition
Nonlinearcontrollaws
+ Powerful robust stability analysis tools
+ Possible deep physical insight
- Need for stronger theoretical background
- Limited tools for performance analysis
Linear versus Non-Linear N
onlin
ear
Stab
ility
Ana
lysi
s

T
T −βv − fv 2 =mTdvdt;mT =m +ma
vAUVspeedcontrol
Dynamics
Nonlinear Plant
T v
)(tvrObjective:generateT(t)sothat )(tv tracksthereferencespeed
Trackingerror vve r −=
mTdedt
=mTdvrdt
−mTdvdtErrorDynamics
Nonlinear control: key ideas N
onlin
ear
Stab
ility
Ana
lysi
s

mTdedt
=mTdvrdt
−mTdvdt
ErrorDynamics
2)( fvvTdtdvm
dttdem r
TT ++−= β
22)( fvvfvvkedtdvm
dtdvm
dtdem r
Tr
TT ++⎥⎦⎤
⎢⎣⎡ +++−= ββ
0=+ kedtde 00 ≥−= tktete );exp()()(
NonlinearControlLaw
2)( fvvKedtdvmT r
T +++= β
Non
linea
r St
abili
ty A
naly
sis
Nonlinear control: key ideas
00 ≥−= tktete );exp()()(
Trackingerrortendstozeroexponentiallyfast.
Simpleandelegant!
Catch:thenonlineardynamicsareknownEXACTLY.
Keyidea:i)use“simple”concepts,ii)dealwithrobustnessagainstparameteruncertainty.
2)( fvvKedtdvmT r
T +++= β
Newtoolsareneeded:LYAPUNOVtheory
Nonlinear control: key ideas

0=+ fvdtdvm
(freemass,subjectedtoasimplemotionresistingforce)v fv
vmf
dtdv −=
)()( 0
)0(tvetv
ttmf −−
=
v
m/f
0 v
t
v=0 is an equilibrium point; dv/dt=0 when v=0!
v=0 is attractive (trajectories converge to 0)
SIMPLEEXAMPLE N
onlin
ear
Stab
ility
Ana
lysi
s
Lyapunov theory of stability: a soft Intro
SIMPLEEXAMPLE

0 v
How can one prove that the trajectories go to the equilibrium point WITHOUT SOLVING the differential equation?
2
21)( mvvV =
(energyfunction)
0,0;0,0)(
==≠
vVvvV ≻
0
)(.))((
2
)(|
≺fvdtdvmv
dtdV
dttdv
vV
dttvdV
tv
−==
→∂∂=
V positive and bounded below by zero; dV/dt negative implies convergence of V to 0!
Lyapunov theory of stability: a soft Intro N
onlin
ear
Stab
ility
Ana
lysi
s

)(
);(
2212
1121
xkxdtdx
xkxdtdx
−−=
−=
)(21)( 2
221 xxxV +=
⎥⎦
⎤⎢⎣
⎡=
2
1
xx
x
State vector
0;21)( ≻IQQxxxV T ==
Q-positive definite
)(xfdtdx =
2-D case
0,0;0,0)(
==≠
vVvvV ≻
Lyapunov theory of stability: a soft Intro N
onlin
ear
Stab
ility
Ana
lysi
s

2-D case
)(
);(
2212
1121
xkxdtdx
xkxdtdx
−−=
−=⎥⎦
⎤⎢⎣
⎡=
2
1
xx
x )(xfdtdx =
ttxtxV ⇐⇐ )())((
)(21)( 2
221 xxxV +=
RtRtxRtxV ∈⇐∈⇐∈ 2)())((
dtdx
xV
dtxdV T
∂∂=)(
1x2 2x1 1x1 0)()()(2221211121 ≺xkxxxxkxxx
dtxdV −−−=
[ ] ⎥⎦
⎤⎢⎣
⎡−−
−=
)()(
,)(
221
11221 xkx
xkxxx
dtxdV
V positive and bounded below by zero; dV/dt negative implies convergence of V to 0! x tends do 0!
x1 k (x1 ) > 0, x1 > 0; x2 k (x2 ) > 0, x2 > 0
Non
linea
r St
abili
ty A
naly
sis

Shifting IstheoriginalwaystheTRUEorigin?
2
2
)()(dtydmmg
dtdyfyk =+−−
mg
)(yk
y
)(dtdyf
y-measured from spring at rest
Examine if yeq is “attractive”!
ζ+= eqxx
dtd
dtd
dtdx
dtdx eq ζζ =+=
)()( ζζζ GxFdtdx
dtd
eq =+==
Equilibrium point yeq: dx/dt=0 mgyk eq =)(
⎥⎥⎦
⎤
⎢⎢⎣
⎡
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡= = 0
; eqeq
yx
dtdyy
x 0)();( == eqxFxFdtdx
0)0()0( =+= eqxFGExamine the ZERO eq. Point!
Non
linea
r St
abili
ty A
naly
sis
Lyapunov theory of stability: a soft Intro

Shifting IstheoriginalwaystheTRUEorigin?
Examine if xref(t) is “attractive”!
ζ+= refxx
dtdxF
dtd
dtdx
dtdx
ref
ref
ζ
ζ
+
=+=
)(
),()()()( tGxFxFxFdtdx
dtd
refrefref ζζζ =−+=−=
0))(()0)((),0( =−+= txFtxFtG refref
))(()(
));(()( txFdttdx
txFdttdx
refref ==
xref(t) is a solution
Examine the ZERO eq. Point!
Lyapunov theory of stability: a soft Intro N
onlin
ear
Stab
ility
Ana
lysi
s

ControlAction
f (0,0) = 0
0)0();( == hyhu
Nonlinear plant
y u
Static control law
dxdt
= f (x ,h (g (x ))); f (0,0) = 0
0)0();( == FxFdtdx
Investigate if 0 is attractive!
0)0();();,( === gxgyuxfdtdx
Lyapunov theory of stability: a soft Intro N
onlin
ear
Stab
ility
Ana
lysi
s

Stability of the zero solution
0)0(;)( == fxfdtdx
0 x-space
The zero solution is STABLE if
0);0()()0()(:0)(,0 ttBtxBtx o ≥∈⇒∈>=∃>∀ εδεδδε
δ
ε Non
linea
r St
abili
ty A
naly
sis
Lyapunov Stability Theory

0)0(;)( == fxfdtdx
0 x-space
The zero solution is locally ATTRACTIVE if
0)(lim)0()(:0 =⇒∈>∃ →∞to txBtx αα
Attractiveness of the zero solution
α
Lyapunov Stability Theory N
onlin
ear
Stab
ility
Ana
lysi
s
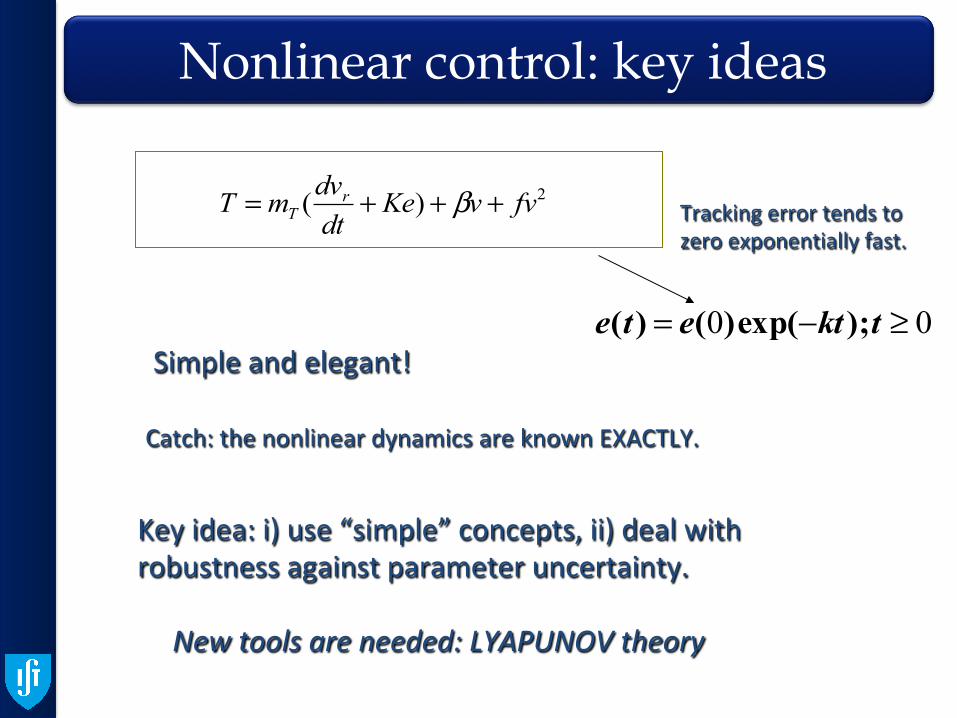
0)0(;)( == fxfdtdx
The zero solution is locally ASYMPTOTICALLY STABLE if it is STABLE and ATTRACTIVE
(thetwoconditionsarerequiredforAsymptoticStability!)
OnemayhaveattractivenessbutNOTStability!
ε
δ
Non
linea
r St
abili
ty A
naly
sis
Lyapunov Stability Theory

)1()(xfdtdx =
Non
linea
r St
abili
ty A
naly
sis
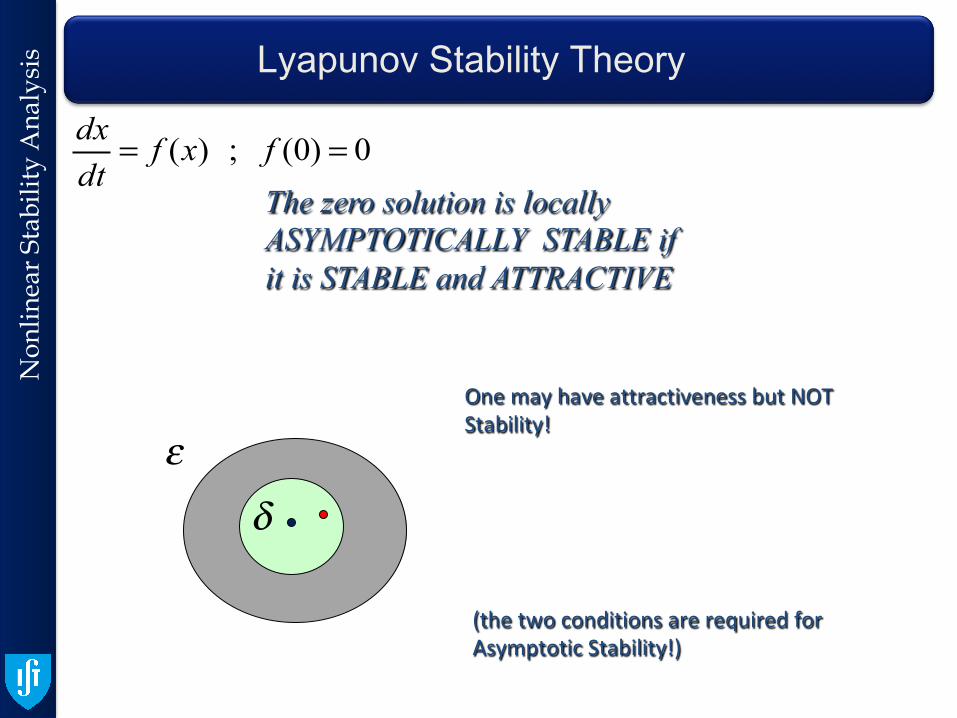
Lyapunov Theory: a formal approach

(thetwoconditionsarerequiredforAsymptoticStability!)ε
δ
Non
linea
r St
abili
ty A
naly
sis
Lyapunov Theory: a formal approach

Thereareatleastthreewaysofassessingthestability(ofanequilibriumpointofa)system:
• Solvethedifferentialequation(brute-force)
• Linearizethedynamicsandexaminethebehaviouroftheresultinglinearsystem(localresultsforhyperboliceq.pointsonly)
• UseLypaunov´sdirectmethod(elegantandpowerful,mayyieldglobalresults)
Stability Analysis N
onlin
ear
Stab
ility
Ana
lysi
s

Lyapunov Theory: a formal approach N
onlin
ear
Stab
ility
Ana
lysi
s
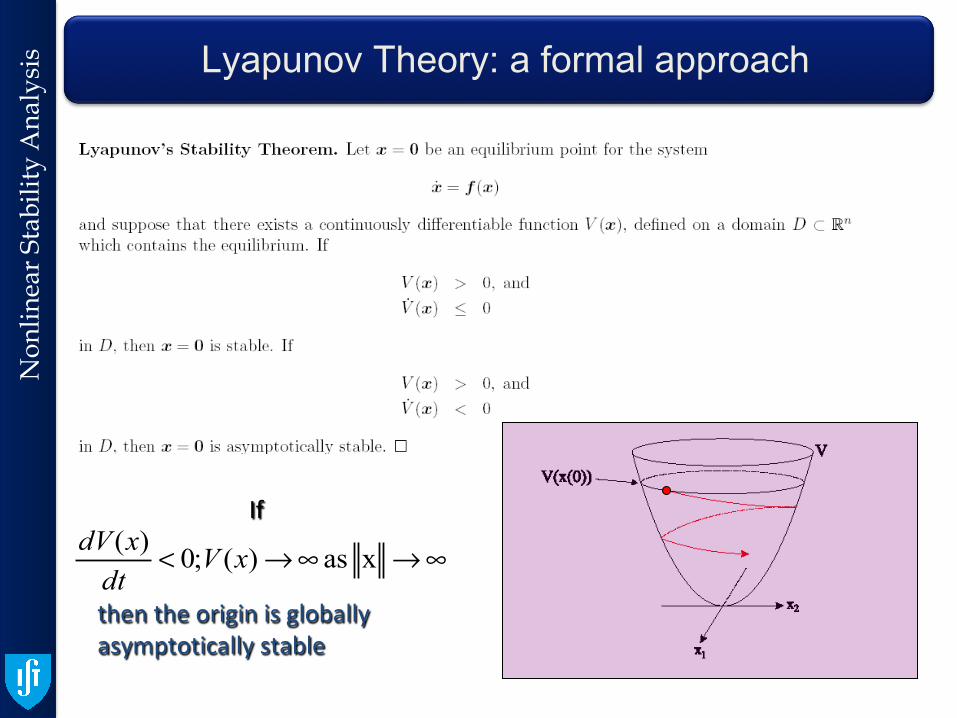
If
∞→∞→< x as )(;0)( xVdtxdV
thentheoriginisgloballyasymptoticallystable
Non
linea
r St
abili
ty A
naly
sis
Lyapunov Theory: a formal approach

Whathappenswhen ?0)( ≤dtxdV
Isthesituationhopeless? No!
⎭⎬⎫
⎩⎨⎧ ==Ω
≤
0)(::
;0)(
dtxdVx
definedtxdVLet
SupposetheonlytrajectoryofthesystementirelycontainedinW isthenulltrajectory.Then,theoriginisasymptoticallystable
(LetMbethelargestinvariantsetcontainedinW.ThenallsolutionsconvergetoM.IfMistheorigin,theresultsfollows)
Krazovskii-LaSalle
Lyapunov Theory: a formal approach N
onlin
ear
Stab
ility
Ana
lysi
s

2
2
)()(dtydm
dtdyfyk =−−
)(yk
y )(dtdyf
⎥⎦
⎤⎢⎣
⎡
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡= = 0
0; eqx
dtdyy
x
0)0();( == FxFdtdx
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
−−=
⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
)(1)(121
2
2
1
xfm
xkm
x
dtdxdtdx
EnergyPotentialEnergyKineticxV +=)(
V (x) = 12mx2
2 + k(ς )dς0
x1
∫
Non
linea
r St
abili
ty: E
xam
ples
Example: Mass-Spring-Dashpot System

)(yk
y )(dtdyf
V (x) = 12mx2
2 + k(ς )dς0
x1
∫⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
−−=
⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
)(1)(121
2
2
1
xfm
xkm
x
dtdxdtdx
dV (x )dt
=mx2
dx2dt
+ k (x1)dx1dt
=
!0)()())(1)(1( 2221212 ≤−=+−− xxfxxkxfm
xkm
mx
f(.), k(.) – 1st and 3rd quadrants f(0)=k(0)=0
V(x)>0!
Non
linea
r St
abili
ty: E
xam
ples
Example: Mass-Spring-Dashpot System

)(yk
y )(dtdyf
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
−−=
⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
)(1)(121
2
2
1
xfm
xkm
x
dtdxdtdx
!0)()(22 ≤− xxf
dtxdV
2x
1x
!00 2 == xfordtdV
Examine dynamics here!
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
−=
⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
)(10
12
1
xkmdt
dxdtdx
Trajectory leaves W unless x1=0!
W
M is the origin. The origin is asymptotically stable!
Non
linea
r St
abili
ty: E
xam
ples
Example: Mass-Spring-Dashpot System

dvdt
= −v |v |+u
dxdt
=v
v -v|v|
AUVmovinginthewaterwithspeedvundertheactionofanappliedforceu.
Objective:drivethepositionxoftheAUVtox*(byproperchoiceofu)
x 0 x*
Example: AUV position control N
onlin
ear
Stab
ility
: Exa
mpl
es

u = −k1(x − x*)− k2v ; k1, k2 > 0
Suggestedcontrollaw
ControllawexhibitsProporcional+DerivativeactionsTheplantitselfhasapureintegrator(todrivethestaticerrorto0)
dvdt
= −v |v |+u
dxdt
=v
dvdt
= −v |v |+u dxdt
=vk1
k2
x * xv
Non
linea
r St
abili
ty: E
xam
ples
Example: AUV position control

Showasymptoticstabilityofthe(equilibriumpointofthe)system
Step1.Startbyre-writingtheequationsintermsofthevariablesthatmustbedriventoo.Objective:
v (t )→ 0e (t ) = x (t )− x *(t )→ 0
dvdt
= −v |v |+u
dedt
=dxdt
−dx *dt
=dxdt
=v
dvdt
= −v |v |−k1e − k2v
dedt
=v
u = −k1(x − x*)− k2v ; k1, k2 > 0
Non
linea
r St
abili
ty: E
xam
ples
Example: AUV position control

Step2.Proveglobalasymptoticstabilityoftheorigin
[v ,e ]T = [0,0]T
isanequilibriumpointofthesystem!
Seekinspirationfromthespring-mass-dashpotsystem
dvdt
= −v |v |−k1e − k2v
dedt
=v
EnergyPotentialEnergyKineticxV +=)(
V (x) = 12mx2
2 + k(ς )dς0
x1
∫)(yk
y )(dtdyf
Non
linea
r St
abili
ty: E
xam
ples
Example: AUV position control
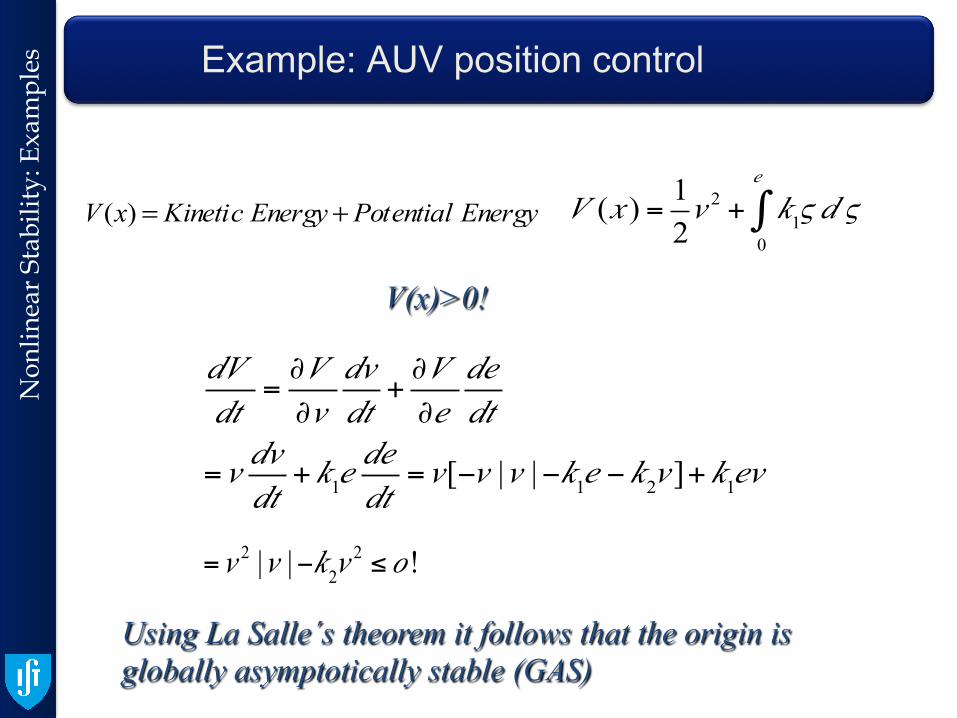
EnergyPotentialEnergyKineticxV +=)( V (x ) = 12v 2 + k1ς d ς
0
e
∫
V(x)>0!
dVdt
=∂V∂vdvdt
+∂V∂ededt
=v dvdt
+ k1ededt
=v[−v |v |−k1e − k2v ]+ k1ev
=v 2 |v |−k2v2 ≤ o!
Using La Salle´s theorem it follows that the origin is globally asymptotically stable (GAS)
Non
linea
r St
abili
ty: E
xam
ples
Example: AUV position control

33
Func
tiona
l Spe
cifi
catio
ns /
Sys
tem
s Th
eory
xB
yBxy
{B}
V
0
AUV trajectory
AUV
ψ
AUV Path Following P
ath
to b
e fo
llow
ed
Non
linea
r St
abili
ty: E
xam
ples
34
xB
yBxy
{B}
V
0
AUV trajectory ψ
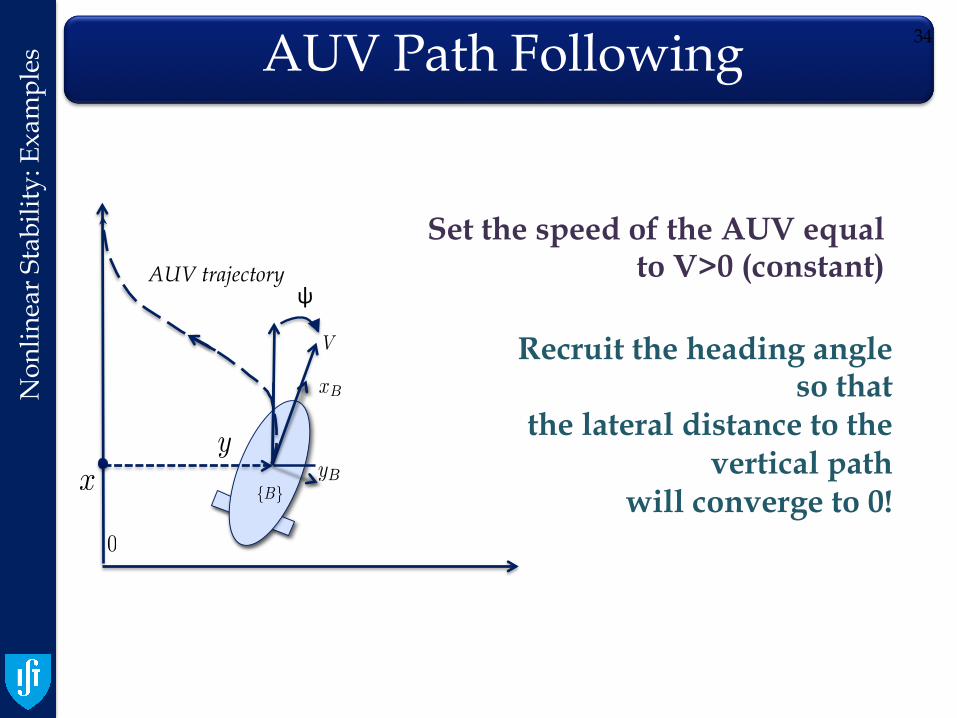
Set the speed of the AUV equal to V>0 (constant)
Recruit the heading angle so that
the lateral distance to the vertical path
will converge to 0!
AUV Path Following N
onlin
ear
Stab
ility
: Exa
mpl
es

35
xB
yBxy
{B}
V
0
AUV trajectory ψ
Plant Model I:
AUV Path Following
dy(t)
dt= V sin (t)
<latexit sha1_base64="ATZm13mm7B+OhlDUjQaEwmQ2Q44=">AAACBXicbVDLSsNAFJ3UV62vqksRBotQNyURQV0IRTcuK9gHNKVMJpN26GQSZm6EELJy46+4caHi1n9w5984fSy09cCFwzn3cu89Xiy4Btv+tgpLyyura8X10sbm1vZOeXevpaNEUdakkYhUxyOaCS5ZEzgI1okVI6EnWNsb3Yz99gNTmkfyHtKY9UIykDzglICR+uVDN1CEZn5ahZM88yG/amHNpRtrbpR+uWLX7AnwInFmpIJmaPTLX64f0SRkEqggWncdO4ZeRhRwKlhechPNYkJHZMC6hkoSMt3LJm/k+NgoPg4iZUoCnqi/JzISap2GnukMCQz1vDcW//O6CQQXvYzLOAEm6XRRkAgMER5ngn2uGAWRGkKo4uZWTIfE5AImuZIJwZl/eZE0T2uXNfvurFK/nqVRRAfoCFWRg85RHd2iBmoiih7RM3pFb9aT9WK9Wx/T1oI1m9lHf2B9/gATu5hs</latexit><latexit sha1_base64="ATZm13mm7B+OhlDUjQaEwmQ2Q44=">AAACBXicbVDLSsNAFJ3UV62vqksRBotQNyURQV0IRTcuK9gHNKVMJpN26GQSZm6EELJy46+4caHi1n9w5984fSy09cCFwzn3cu89Xiy4Btv+tgpLyyura8X10sbm1vZOeXevpaNEUdakkYhUxyOaCS5ZEzgI1okVI6EnWNsb3Yz99gNTmkfyHtKY9UIykDzglICR+uVDN1CEZn5ahZM88yG/amHNpRtrbpR+uWLX7AnwInFmpIJmaPTLX64f0SRkEqggWncdO4ZeRhRwKlhechPNYkJHZMC6hkoSMt3LJm/k+NgoPg4iZUoCnqi/JzISap2GnukMCQz1vDcW//O6CQQXvYzLOAEm6XRRkAgMER5ngn2uGAWRGkKo4uZWTIfE5AImuZIJwZl/eZE0T2uXNfvurFK/nqVRRAfoCFWRg85RHd2iBmoiih7RM3pFb9aT9WK9Wx/T1oI1m9lHf2B9/gATu5hs</latexit><latexit sha1_base64="ATZm13mm7B+OhlDUjQaEwmQ2Q44=">AAACBXicbVDLSsNAFJ3UV62vqksRBotQNyURQV0IRTcuK9gHNKVMJpN26GQSZm6EELJy46+4caHi1n9w5984fSy09cCFwzn3cu89Xiy4Btv+tgpLyyura8X10sbm1vZOeXevpaNEUdakkYhUxyOaCS5ZEzgI1okVI6EnWNsb3Yz99gNTmkfyHtKY9UIykDzglICR+uVDN1CEZn5ahZM88yG/amHNpRtrbpR+uWLX7AnwInFmpIJmaPTLX64f0SRkEqggWncdO4ZeRhRwKlhechPNYkJHZMC6hkoSMt3LJm/k+NgoPg4iZUoCnqi/JzISap2GnukMCQz1vDcW//O6CQQXvYzLOAEm6XRRkAgMER5ngn2uGAWRGkKo4uZWTIfE5AImuZIJwZl/eZE0T2uXNfvurFK/nqVRRAfoCFWRg85RHd2iBmoiih7RM3pFb9aT9WK9Wx/T1oI1m9lHf2B9/gATu5hs</latexit>
<latexit sha1_base64="cGDsDmn9f+2MmQ9apPHSI1VklXo=">AAAB63icbVBNS8NAEJ3Ur1q/qh69LBbBU0lEUG9FLx4rGFtoQ9lsN+3SzSbsToQS+hu8eFDx6h/y5r9x0+ag1QcDj/dmmJkXplIYdN0vp7Kyura+Ud2sbW3v7O7V9w8eTJJpxn2WyER3Q2q4FIr7KFDybqo5jUPJO+HkpvA7j1wbkah7nKY8iOlIiUgwilby+6kRtUG94TbdOchf4pWkASXag/pnf5iwLOYKmaTG9Dw3xSCnGgWTfFbrZ4anlE3oiPcsVTTmJsjnx87IiVWGJEq0LYVkrv6cyGlszDQObWdMcWyWvUL8z+tlGF0GuVBphlyxxaIokwQTUnxOhkJzhnJqCWVa2FsJG1NNGdp8ihC85Zf/Ev+sedV0784bresyjSocwTGcggcX0IJbaIMPDAQ8wQu8Osp5dt6c90VrxSlnDuEXnI9vxsCOMQ==</latexit><latexit sha1_base64="cGDsDmn9f+2MmQ9apPHSI1VklXo=">AAAB63icbVBNS8NAEJ3Ur1q/qh69LBbBU0lEUG9FLx4rGFtoQ9lsN+3SzSbsToQS+hu8eFDx6h/y5r9x0+ag1QcDj/dmmJkXplIYdN0vp7Kyura+Ud2sbW3v7O7V9w8eTJJpxn2WyER3Q2q4FIr7KFDybqo5jUPJO+HkpvA7j1wbkah7nKY8iOlIiUgwilby+6kRtUG94TbdOchf4pWkASXag/pnf5iwLOYKmaTG9Dw3xSCnGgWTfFbrZ4anlE3oiPcsVTTmJsjnx87IiVWGJEq0LYVkrv6cyGlszDQObWdMcWyWvUL8z+tlGF0GuVBphlyxxaIokwQTUnxOhkJzhnJqCWVa2FsJG1NNGdp8ihC85Zf/Ev+sedV0784bresyjSocwTGcggcX0IJbaIMPDAQ8wQu8Osp5dt6c90VrxSlnDuEXnI9vxsCOMQ==</latexit><latexit sha1_base64="cGDsDmn9f+2MmQ9apPHSI1VklXo=">AAAB63icbVBNS8NAEJ3Ur1q/qh69LBbBU0lEUG9FLx4rGFtoQ9lsN+3SzSbsToQS+hu8eFDx6h/y5r9x0+ag1QcDj/dmmJkXplIYdN0vp7Kyura+Ud2sbW3v7O7V9w8eTJJpxn2WyER3Q2q4FIr7KFDybqo5jUPJO+HkpvA7j1wbkah7nKY8iOlIiUgwilby+6kRtUG94TbdOchf4pWkASXag/pnf5iwLOYKmaTG9Dw3xSCnGgWTfFbrZ4anlE3oiPcsVTTmJsjnx87IiVWGJEq0LYVkrv6cyGlszDQObWdMcWyWvUL8z+tlGF0GuVBphlyxxaIokwQTUnxOhkJzhnJqCWVa2FsJG1NNGdp8ihC85Zf/Ev+sedV0784bresyjSocwTGcggcX0IJbaIMPDAQ8wQu8Osp5dt6c90VrxSlnDuEXnI9vxsCOMQ==</latexit>
y<latexit sha1_base64="YBnOz4OfA0qe2MXK9oswnbSi1XA=">AAAB6HicbVBNS8NAEJ3Ur1q/qh69LBbBU0lEUG9FLx6rGFtoQ9lsN+3SzW7Y3Qgh9B948aDi1Z/kzX/jps1BWx8MPN6bYWZemHCmjet+O5WV1bX1jepmbWt7Z3evvn/wqGWqCPWJ5FJ1Q6wpZ4L6hhlOu4miOA457YSTm8LvPFGlmRQPJktoEOORYBEj2FjpPqsN6g236c6AlolXkgaUaA/qX/2hJGlMhSEca93z3MQEOVaGEU6ntX6qaYLJBI9oz1KBY6qDfHbpFJ1YZYgiqWwJg2bq74kcx1pncWg7Y2zGetErxP+8XmqiyyBnIkkNFWS+KEo5MhIVb6MhU5QYnlmCiWL2VkTGWGFibDhFCN7iy8vEP2teNd2780brukyjCkdwDKfgwQW04Bba4AOBCJ7hFd6cifPivDsf89aKU84cwh84nz+KSozk</latexit><latexit sha1_base64="YBnOz4OfA0qe2MXK9oswnbSi1XA=">AAAB6HicbVBNS8NAEJ3Ur1q/qh69LBbBU0lEUG9FLx6rGFtoQ9lsN+3SzW7Y3Qgh9B948aDi1Z/kzX/jps1BWx8MPN6bYWZemHCmjet+O5WV1bX1jepmbWt7Z3evvn/wqGWqCPWJ5FJ1Q6wpZ4L6hhlOu4miOA457YSTm8LvPFGlmRQPJktoEOORYBEj2FjpPqsN6g236c6AlolXkgaUaA/qX/2hJGlMhSEca93z3MQEOVaGEU6ntX6qaYLJBI9oz1KBY6qDfHbpFJ1YZYgiqWwJg2bq74kcx1pncWg7Y2zGetErxP+8XmqiyyBnIkkNFWS+KEo5MhIVb6MhU5QYnlmCiWL2VkTGWGFibDhFCN7iy8vEP2teNd2780brukyjCkdwDKfgwQW04Bba4AOBCJ7hFd6cifPivDsf89aKU84cwh84nz+KSozk</latexit><latexit sha1_base64="YBnOz4OfA0qe2MXK9oswnbSi1XA=">AAAB6HicbVBNS8NAEJ3Ur1q/qh69LBbBU0lEUG9FLx6rGFtoQ9lsN+3SzW7Y3Qgh9B948aDi1Z/kzX/jps1BWx8MPN6bYWZemHCmjet+O5WV1bX1jepmbWt7Z3evvn/wqGWqCPWJ5FJ1Q6wpZ4L6hhlOu4miOA457YSTm8LvPFGlmRQPJktoEOORYBEj2FjpPqsN6g236c6AlolXkgaUaA/qX/2hJGlMhSEca93z3MQEOVaGEU6ntX6qaYLJBI9oz1KBY6qDfHbpFJ1YZYgiqWwJg2bq74kcx1pncWg7Y2zGetErxP+8XmqiyyBnIkkNFWS+KEo5MhIVb6MhU5QYnlmCiWL2VkTGWGFibDhFCN7iy8vEP2teNd2780brukyjCkdwDKfgwQW04Bba4AOBCJ7hFd6cifPivDsf89aKU84cwh84nz+KSozk</latexit>Plant Model
<latexit sha1_base64="HdkFIKDvlU4NCBi6pyctNR8SRU8=">AAAB93icbVBNS8NAFHypX7V+NOrRy2IRPJVEBBUvRS9ehArGFtpQNptNu3STDbsboYb+Ei8eVLz6V7z5b9y0OWh1YGGYeY83O0HKmdKO82VVlpZXVteq67WNza3tur2ze69EJgn1iOBCdgOsKGcJ9TTTnHZTSXEccNoJxleF33mgUjGR3OlJSv0YDxMWMYK1kQZ2vc1xolH/At2IkPLawG44TWcG9Je4JWlAifbA/uyHgmQxTTThWKme66Taz7HUjHA6rfUzRVNMxnhIe4YmOKbKz2fBp+jQKCGKhDTPpJipPzdyHCs1iQMzGWM9UoteIf7n9TIdnfk5S9JM04TMD0UZR1qgogUUMkmJ5hNDMJHMZEVkhCUm2nRVlOAufvkv8Y6b503n9qTRuizbqMI+HMARuHAKLbiGNnhAIIMneIFX69F6tt6s9/loxSp39uAXrI9vh7uR5Q==</latexit><latexit sha1_base64="HdkFIKDvlU4NCBi6pyctNR8SRU8=">AAAB93icbVBNS8NAFHypX7V+NOrRy2IRPJVEBBUvRS9ehArGFtpQNptNu3STDbsboYb+Ei8eVLz6V7z5b9y0OWh1YGGYeY83O0HKmdKO82VVlpZXVteq67WNza3tur2ze69EJgn1iOBCdgOsKGcJ9TTTnHZTSXEccNoJxleF33mgUjGR3OlJSv0YDxMWMYK1kQZ2vc1xolH/At2IkPLawG44TWcG9Je4JWlAifbA/uyHgmQxTTThWKme66Taz7HUjHA6rfUzRVNMxnhIe4YmOKbKz2fBp+jQKCGKhDTPpJipPzdyHCs1iQMzGWM9UoteIf7n9TIdnfk5S9JM04TMD0UZR1qgogUUMkmJ5hNDMJHMZEVkhCUm2nRVlOAufvkv8Y6b503n9qTRuizbqMI+HMARuHAKLbiGNnhAIIMneIFX69F6tt6s9/loxSp39uAXrI9vh7uR5Q==</latexit><latexit sha1_base64="HdkFIKDvlU4NCBi6pyctNR8SRU8=">AAAB93icbVBNS8NAFHypX7V+NOrRy2IRPJVEBBUvRS9ehArGFtpQNptNu3STDbsboYb+Ei8eVLz6V7z5b9y0OWh1YGGYeY83O0HKmdKO82VVlpZXVteq67WNza3tur2ze69EJgn1iOBCdgOsKGcJ9TTTnHZTSXEccNoJxleF33mgUjGR3OlJSv0YDxMWMYK1kQZ2vc1xolH/At2IkPLawG44TWcG9Je4JWlAifbA/uyHgmQxTTThWKme66Taz7HUjHA6rfUzRVNMxnhIe4YmOKbKz2fBp+jQKCGKhDTPpJipPzdyHCs1iQMzGWM9UoteIf7n9TIdnfk5S9JM04TMD0UZR1qgogUUMkmJ5hNDMJHMZEVkhCUm2nRVlOAufvkv8Y6b503n9qTRuizbqMI+HMARuHAKLbiGNnhAIIMneIFX69F6tt6s9/loxSp39uAXrI9vh7uR5Q==</latexit>
input<latexit sha1_base64="LKDUr8nARCFfy/y8jbjzLyMGHTQ=">AAAB7HicbVBNSwMxFHzrZ61fVY9egkXwVHZFUG9FLx4ruG2hXUo2zbax2WRJskJZ+h+8eFDx6g/y5r8xu92Dtg4Ehpn3yJsJE860cd1vZ2V1bX1js7JV3d7Z3duvHRy2tUwVoT6RXKpuiDXlTFDfMMNpN1EUxyGnnXBym/udJ6o0k+LBTBMaxHgkWMQINlZqM5Gkpjqo1d2GWwAtE68kdSjRGtS++kNJ0pgKQzjWuue5iQkyrAwjnM6q/VTTBJMJHtGepQLHVAdZce0MnVpliCKp7BMGFervjQzHWk/j0E7G2Iz1opeL/3m91ERXQVZEooLMP4pSjoxEeXQ0ZIoSw6eWYKKYvRWRMVaYGFtQXoK3GHmZ+OeN64Z7f1Fv3pRtVOAYTuAMPLiEJtxBC3wg8AjP8ApvjnRenHfnYz664pQ7R/AHzucPu7aOww==</latexit><latexit sha1_base64="LKDUr8nARCFfy/y8jbjzLyMGHTQ=">AAAB7HicbVBNSwMxFHzrZ61fVY9egkXwVHZFUG9FLx4ruG2hXUo2zbax2WRJskJZ+h+8eFDx6g/y5r8xu92Dtg4Ehpn3yJsJE860cd1vZ2V1bX1js7JV3d7Z3duvHRy2tUwVoT6RXKpuiDXlTFDfMMNpN1EUxyGnnXBym/udJ6o0k+LBTBMaxHgkWMQINlZqM5Gkpjqo1d2GWwAtE68kdSjRGtS++kNJ0pgKQzjWuue5iQkyrAwjnM6q/VTTBJMJHtGepQLHVAdZce0MnVpliCKp7BMGFervjQzHWk/j0E7G2Iz1opeL/3m91ERXQVZEooLMP4pSjoxEeXQ0ZIoSw6eWYKKYvRWRMVaYGFtQXoK3GHmZ+OeN64Z7f1Fv3pRtVOAYTuAMPLiEJtxBC3wg8AjP8ApvjnRenHfnYz664pQ7R/AHzucPu7aOww==</latexit><latexit sha1_base64="LKDUr8nARCFfy/y8jbjzLyMGHTQ=">AAAB7HicbVBNSwMxFHzrZ61fVY9egkXwVHZFUG9FLx4ruG2hXUo2zbax2WRJskJZ+h+8eFDx6g/y5r8xu92Dtg4Ehpn3yJsJE860cd1vZ2V1bX1js7JV3d7Z3duvHRy2tUwVoT6RXKpuiDXlTFDfMMNpN1EUxyGnnXBym/udJ6o0k+LBTBMaxHgkWMQINlZqM5Gkpjqo1d2GWwAtE68kdSjRGtS++kNJ0pgKQzjWuue5iQkyrAwjnM6q/VTTBJMJHtGepQLHVAdZce0MnVpliCKp7BMGFervjQzHWk/j0E7G2Iz1opeL/3m91ERXQVZEooLMP4pSjoxEeXQ0ZIoSw6eWYKKYvRWRMVaYGFtQXoK3GHmZ+OeN64Z7f1Fv3pRtVOAYTuAMPLiEJtxBC3wg8AjP8ApvjnRenHfnYz664pQ7R/AHzucPu7aOww==</latexit>
output<latexit sha1_base64="fLL7CYRKqua5Cng0Dxa8RPrk964=">AAAB7XicbVBNS8NAFHypX7V+VT16CRbBU0lEUG9FLx4rGFtoQ9lsN+3SzW7YfRFK6I/w4kHFq//Hm//GTZuDVgcWhpn32DcTpYIb9Lwvp7Kyura+Ud2sbW3v7O7V9w8ejMo0ZQFVQuluRAwTXLIAOQrWTTUjSSRYJ5rcFH7nkWnDlbzHacrChIwkjzklaKWOyjDNsDaoN7ymN4f7l/glaUCJ9qD+2R8qmiVMIhXEmJ7vpRjmRCOngs1q/cywlNAJGbGepZIkzIT5/NyZe2KVoRsrbZ9Ed67+3MhJYsw0iexkQnBslr1C/M/rZRhfhjmXNhKTdPFRnAkXlVtkd4dcM4piagmhmttbXTommlC0DRUl+MuR/5LgrHnV9O7OG63rso0qHMExnIIPF9CCW2hDABQm8AQv8OqkzrPz5rwvRitOuXMIv+B8fAOmo49O</latexit><latexit sha1_base64="fLL7CYRKqua5Cng0Dxa8RPrk964=">AAAB7XicbVBNS8NAFHypX7V+VT16CRbBU0lEUG9FLx4rGFtoQ9lsN+3SzW7YfRFK6I/w4kHFq//Hm//GTZuDVgcWhpn32DcTpYIb9Lwvp7Kyura+Ud2sbW3v7O7V9w8ejMo0ZQFVQuluRAwTXLIAOQrWTTUjSSRYJ5rcFH7nkWnDlbzHacrChIwkjzklaKWOyjDNsDaoN7ymN4f7l/glaUCJ9qD+2R8qmiVMIhXEmJ7vpRjmRCOngs1q/cywlNAJGbGepZIkzIT5/NyZe2KVoRsrbZ9Ed67+3MhJYsw0iexkQnBslr1C/M/rZRhfhjmXNhKTdPFRnAkXlVtkd4dcM4piagmhmttbXTommlC0DRUl+MuR/5LgrHnV9O7OG63rso0qHMExnIIPF9CCW2hDABQm8AQv8OqkzrPz5rwvRitOuXMIv+B8fAOmo49O</latexit><latexit sha1_base64="fLL7CYRKqua5Cng0Dxa8RPrk964=">AAAB7XicbVBNS8NAFHypX7V+VT16CRbBU0lEUG9FLx4rGFtoQ9lsN+3SzW7YfRFK6I/w4kHFq//Hm//GTZuDVgcWhpn32DcTpYIb9Lwvp7Kyura+Ud2sbW3v7O7V9w8ejMo0ZQFVQuluRAwTXLIAOQrWTTUjSSRYJ5rcFH7nkWnDlbzHacrChIwkjzklaKWOyjDNsDaoN7ymN4f7l/glaUCJ9qD+2R8qmiVMIhXEmJ7vpRjmRCOngs1q/cywlNAJGbGepZIkzIT5/NyZe2KVoRsrbZ9Ed67+3MhJYsw0iexkQnBslr1C/M/rZRhfhjmXNhKTdPFRnAkXlVtkd4dcM4piagmhmttbXTommlC0DRUl+MuR/5LgrHnV9O7OG63rso0qHMExnIIPF9CCW2hDABQm8AQv8OqkzrPz5rwvRitOuXMIv+B8fAOmo49O</latexit>
Objective
Compute (t) so that lim t!1 y(t) = 0<latexit sha1_base64="RwRA7KEufflgpmHdGqd8uOoyZGk=">AAACNXicbVDLSgMxFM34rPVVdekmWIQKUqYiqIggunEjKFgrdErJpJk2mMeQ3FGGoV/lxu9w140LFbf+gpm2C7UeSO7hnHtJ7gljwS34/sCbmp6ZnZsvLBQXl5ZXVktr67dWJ4ayOtVCm7uQWCa4YnXgINhdbBiRoWCN8P489xsPzFiu1Q2kMWtJ0lU84pSAk9qly3Mt4wQYDnZxEFtegR0cHGOr8xt6BPIquHSlnUFgeLcHxBj9iAOuIkhxP29I3diJX8TtUtmv+kPgSVIbkzIa46pdegk6miaSKaCCWNus+TG0MmKAU8H6xSCxLCb0nnRZ01FFJLOtbLh2H287pYMjbdxRgIfqz4mMSGtTGbpOSaBn/3q5+J/XTCA6bGVc5cEoOnooSgQGjfMMcYcbRkGkjhBquPsrpj1iCAWXdNGFUPu78iSp71WPqv71fvn0bJxGAW2iLVRBNXSATtEFukJ1RNETGqA39O49e6/eh/c5ap3yxjMb6Be8r2/G66iF</latexit><latexit sha1_base64="RwRA7KEufflgpmHdGqd8uOoyZGk=">AAACNXicbVDLSgMxFM34rPVVdekmWIQKUqYiqIggunEjKFgrdErJpJk2mMeQ3FGGoV/lxu9w140LFbf+gpm2C7UeSO7hnHtJ7gljwS34/sCbmp6ZnZsvLBQXl5ZXVktr67dWJ4ayOtVCm7uQWCa4YnXgINhdbBiRoWCN8P489xsPzFiu1Q2kMWtJ0lU84pSAk9qly3Mt4wQYDnZxEFtegR0cHGOr8xt6BPIquHSlnUFgeLcHxBj9iAOuIkhxP29I3diJX8TtUtmv+kPgSVIbkzIa46pdegk6miaSKaCCWNus+TG0MmKAU8H6xSCxLCb0nnRZ01FFJLOtbLh2H287pYMjbdxRgIfqz4mMSGtTGbpOSaBn/3q5+J/XTCA6bGVc5cEoOnooSgQGjfMMcYcbRkGkjhBquPsrpj1iCAWXdNGFUPu78iSp71WPqv71fvn0bJxGAW2iLVRBNXSATtEFukJ1RNETGqA39O49e6/eh/c5ap3yxjMb6Be8r2/G66iF</latexit><latexit sha1_base64="RwRA7KEufflgpmHdGqd8uOoyZGk=">AAACNXicbVDLSgMxFM34rPVVdekmWIQKUqYiqIggunEjKFgrdErJpJk2mMeQ3FGGoV/lxu9w140LFbf+gpm2C7UeSO7hnHtJ7gljwS34/sCbmp6ZnZsvLBQXl5ZXVktr67dWJ4ayOtVCm7uQWCa4YnXgINhdbBiRoWCN8P489xsPzFiu1Q2kMWtJ0lU84pSAk9qly3Mt4wQYDnZxEFtegR0cHGOr8xt6BPIquHSlnUFgeLcHxBj9iAOuIkhxP29I3diJX8TtUtmv+kPgSVIbkzIa46pdegk6miaSKaCCWNus+TG0MmKAU8H6xSCxLCb0nnRZ01FFJLOtbLh2H287pYMjbdxRgIfqz4mMSGtTGbpOSaBn/3q5+J/XTCA6bGVc5cEoOnooSgQGjfMMcYcbRkGkjhBquPsrpj1iCAWXdNGFUPu78iSp71WPqv71fvn0bJxGAW2iLVRBNXSATtEFukJ1RNETGqA39O49e6/eh/c5ap3yxjMb6Be8r2/G66iF</latexit>
Non
linea
r St
abili
ty: E
xam
ples

36
xB
yBxy
{B}
V
0
AUV trajectory ψ
AUV Path Following
y(t) : deviation from the path (path following ERROR)<latexit sha1_base64="U7ZULyhlIbeGxEwa+LN0kOFhVkc=">AAACM3icbVBLSwMxEM76rPVV9eglWIR6KVsRfF2KIgge1GJVaEvJprNtaDZZklmlFH+UF3+IFxE8qHj1P5itFXx9EOabb2bIzBfEUlj0/UdvZHRsfGIyM5Wdnpmdm88tLJ5bnRgOVa6lNpcBsyCFgioKlHAZG2BRIOEi6O6n9YsrMFZodYa9GBoRaysRCs7QSc3cUa+Aazu0vktbcCUGYpqERkdpxA6kIWbYofUdWvgioZZSXwvVTpODSuW4spalzVzeL/oD0L+kNCR5MsRJM3dfb2meRKCQS2ZtreTH2Ogzg4JLuMnWEwsx413WhpqjikVgG/3B0Td01Sktt4hxTyEdqN8n+iyythcFrjNyW9vftVT8r1ZLMNxq9IWKEwTFPz8KE0lR09RB2hIGOMqeI4wb4XalvMMM4+h8zjoTSr9P/kuq68Xton+6kS/vDd3IkGWyQgqkRDZJmRySE1IlnNySB/JMXrw778l79d4+W0e84cwS+QHv/QNzLqaq</latexit><latexit sha1_base64="U7ZULyhlIbeGxEwa+LN0kOFhVkc=">AAACM3icbVBLSwMxEM76rPVV9eglWIR6KVsRfF2KIgge1GJVaEvJprNtaDZZklmlFH+UF3+IFxE8qHj1P5itFXx9EOabb2bIzBfEUlj0/UdvZHRsfGIyM5Wdnpmdm88tLJ5bnRgOVa6lNpcBsyCFgioKlHAZG2BRIOEi6O6n9YsrMFZodYa9GBoRaysRCs7QSc3cUa+Aazu0vktbcCUGYpqERkdpxA6kIWbYofUdWvgioZZSXwvVTpODSuW4spalzVzeL/oD0L+kNCR5MsRJM3dfb2meRKCQS2ZtreTH2Ogzg4JLuMnWEwsx413WhpqjikVgG/3B0Td01Sktt4hxTyEdqN8n+iyythcFrjNyW9vftVT8r1ZLMNxq9IWKEwTFPz8KE0lR09RB2hIGOMqeI4wb4XalvMMM4+h8zjoTSr9P/kuq68Xton+6kS/vDd3IkGWyQgqkRDZJmRySE1IlnNySB/JMXrw778l79d4+W0e84cwS+QHv/QNzLqaq</latexit><latexit sha1_base64="U7ZULyhlIbeGxEwa+LN0kOFhVkc=">AAACM3icbVBLSwMxEM76rPVV9eglWIR6KVsRfF2KIgge1GJVaEvJprNtaDZZklmlFH+UF3+IFxE8qHj1P5itFXx9EOabb2bIzBfEUlj0/UdvZHRsfGIyM5Wdnpmdm88tLJ5bnRgOVa6lNpcBsyCFgioKlHAZG2BRIOEi6O6n9YsrMFZodYa9GBoRaysRCs7QSc3cUa+Aazu0vktbcCUGYpqERkdpxA6kIWbYofUdWvgioZZSXwvVTpODSuW4spalzVzeL/oD0L+kNCR5MsRJM3dfb2meRKCQS2ZtreTH2Ogzg4JLuMnWEwsx413WhpqjikVgG/3B0Td01Sktt4hxTyEdqN8n+iyythcFrjNyW9vftVT8r1ZLMNxq9IWKEwTFPz8KE0lR09RB2hIGOMqeI4wb4XalvMMM4+h8zjoTSr9P/kuq68Xton+6kS/vDd3IkGWyQgqkRDZJmRySE1IlnNySB/JMXrw778l79d4+W0e84cwS+QHv/QNzLqaq</latexit>
dy(t)
dt= V sin (t)
<latexit sha1_base64="ATZm13mm7B+OhlDUjQaEwmQ2Q44=">AAACBXicbVDLSsNAFJ3UV62vqksRBotQNyURQV0IRTcuK9gHNKVMJpN26GQSZm6EELJy46+4caHi1n9w5984fSy09cCFwzn3cu89Xiy4Btv+tgpLyyura8X10sbm1vZOeXevpaNEUdakkYhUxyOaCS5ZEzgI1okVI6EnWNsb3Yz99gNTmkfyHtKY9UIykDzglICR+uVDN1CEZn5ahZM88yG/amHNpRtrbpR+uWLX7AnwInFmpIJmaPTLX64f0SRkEqggWncdO4ZeRhRwKlhechPNYkJHZMC6hkoSMt3LJm/k+NgoPg4iZUoCnqi/JzISap2GnukMCQz1vDcW//O6CQQXvYzLOAEm6XRRkAgMER5ngn2uGAWRGkKo4uZWTIfE5AImuZIJwZl/eZE0T2uXNfvurFK/nqVRRAfoCFWRg85RHd2iBmoiih7RM3pFb9aT9WK9Wx/T1oI1m9lHf2B9/gATu5hs</latexit><latexit sha1_base64="ATZm13mm7B+OhlDUjQaEwmQ2Q44=">AAACBXicbVDLSsNAFJ3UV62vqksRBotQNyURQV0IRTcuK9gHNKVMJpN26GQSZm6EELJy46+4caHi1n9w5984fSy09cCFwzn3cu89Xiy4Btv+tgpLyyura8X10sbm1vZOeXevpaNEUdakkYhUxyOaCS5ZEzgI1okVI6EnWNsb3Yz99gNTmkfyHtKY9UIykDzglICR+uVDN1CEZn5ahZM88yG/amHNpRtrbpR+uWLX7AnwInFmpIJmaPTLX64f0SRkEqggWncdO4ZeRhRwKlhechPNYkJHZMC6hkoSMt3LJm/k+NgoPg4iZUoCnqi/JzISap2GnukMCQz1vDcW//O6CQQXvYzLOAEm6XRRkAgMER5ngn2uGAWRGkKo4uZWTIfE5AImuZIJwZl/eZE0T2uXNfvurFK/nqVRRAfoCFWRg85RHd2iBmoiih7RM3pFb9aT9WK9Wx/T1oI1m9lHf2B9/gATu5hs</latexit><latexit sha1_base64="ATZm13mm7B+OhlDUjQaEwmQ2Q44=">AAACBXicbVDLSsNAFJ3UV62vqksRBotQNyURQV0IRTcuK9gHNKVMJpN26GQSZm6EELJy46+4caHi1n9w5984fSy09cCFwzn3cu89Xiy4Btv+tgpLyyura8X10sbm1vZOeXevpaNEUdakkYhUxyOaCS5ZEzgI1okVI6EnWNsb3Yz99gNTmkfyHtKY9UIykDzglICR+uVDN1CEZn5ahZM88yG/amHNpRtrbpR+uWLX7AnwInFmpIJmaPTLX64f0SRkEqggWncdO4ZeRhRwKlhechPNYkJHZMC6hkoSMt3LJm/k+NgoPg4iZUoCnqi/JzISap2GnukMCQz1vDcW//O6CQQXvYzLOAEm6XRRkAgMER5ngn2uGAWRGkKo4uZWTIfE5AImuZIJwZl/eZE0T2uXNfvurFK/nqVRRAfoCFWRg85RHd2iBmoiih7RM3pFb9aT9WK9Wx/T1oI1m9lHf2B9/gATu5hs</latexit>
Objective: reduce the error to o!
Simplified (linearized) model
dy(t)
dt= V (t)
<latexit sha1_base64="MACDnNg7HwZqtTnymacJ7A3qS30=">AAACAnicbVDLSsNAFJ3UV62vqDvdDBahbkoigroQim5cVjBtoSllMpm0QycPZm6EEAJu/BU3LlTc+hXu/Bunj4W2Hrhw5px7mXuPlwiuwLK+jdLS8srqWnm9srG5tb1j7u61VJxKyhwai1h2PKKY4BFzgINgnUQyEnqCtb3RzdhvPzCpeBzdQ5awXkgGEQ84JaClvnngBpLQ3M9qcFLkPhRXLewmiutn36xadWsCvEjsGamiGZp988v1Y5qGLAIqiFJd20qglxMJnApWVNxUsYTQERmwrqYRCZnq5ZMbCnysFR8HsdQVAZ6ovydyEiqVhZ7uDAkM1bw3Fv/zuikEF72cR0kKLKLTj4JUYIjxOBDsc8koiEwTQiXXu2I6JDoU0LFVdAj2/MmLxDmtX9atu7Nq43qWRhkdoiNUQzY6Rw10i5rIQRQ9omf0it6MJ+PFeDc+pq0lYzazj/7A+PwBkXqXBA==</latexit><latexit sha1_base64="MACDnNg7HwZqtTnymacJ7A3qS30=">AAACAnicbVDLSsNAFJ3UV62vqDvdDBahbkoigroQim5cVjBtoSllMpm0QycPZm6EEAJu/BU3LlTc+hXu/Bunj4W2Hrhw5px7mXuPlwiuwLK+jdLS8srqWnm9srG5tb1j7u61VJxKyhwai1h2PKKY4BFzgINgnUQyEnqCtb3RzdhvPzCpeBzdQ5awXkgGEQ84JaClvnngBpLQ3M9qcFLkPhRXLewmiutn36xadWsCvEjsGamiGZp988v1Y5qGLAIqiFJd20qglxMJnApWVNxUsYTQERmwrqYRCZnq5ZMbCnysFR8HsdQVAZ6ovydyEiqVhZ7uDAkM1bw3Fv/zuikEF72cR0kKLKLTj4JUYIjxOBDsc8koiEwTQiXXu2I6JDoU0LFVdAj2/MmLxDmtX9atu7Nq43qWRhkdoiNUQzY6Rw10i5rIQRQ9omf0it6MJ+PFeDc+pq0lYzazj/7A+PwBkXqXBA==</latexit><latexit sha1_base64="MACDnNg7HwZqtTnymacJ7A3qS30=">AAACAnicbVDLSsNAFJ3UV62vqDvdDBahbkoigroQim5cVjBtoSllMpm0QycPZm6EEAJu/BU3LlTc+hXu/Bunj4W2Hrhw5px7mXuPlwiuwLK+jdLS8srqWnm9srG5tb1j7u61VJxKyhwai1h2PKKY4BFzgINgnUQyEnqCtb3RzdhvPzCpeBzdQ5awXkgGEQ84JaClvnngBpLQ3M9qcFLkPhRXLewmiutn36xadWsCvEjsGamiGZp988v1Y5qGLAIqiFJd20qglxMJnApWVNxUsYTQERmwrqYRCZnq5ZMbCnysFR8HsdQVAZ6ovydyEiqVhZ7uDAkM1bw3Fv/zuikEF72cR0kKLKLTj4JUYIjxOBDsc8koiEwTQiXXu2I6JDoU0LFVdAj2/MmLxDmtX9atu7Nq43qWRhkdoiNUQzY6Rw10i5rIQRQ9omf0it6MJ+PFeDc+pq0lYzazj/7A+PwBkXqXBA==</latexit>
small (t)<latexit sha1_base64="EP/8fQslvmB9suyCYNmsel//OKo=">AAAB+HicbVBNS8NAEJ34WetX1KOXxSLUS0lFUPFS9OKxgrGFJpTNdtMu3d2E3U2hhP4TLx5UvPpTvPlv3LY5aOuDgcd7M8zMi1LOtPG8b2dldW19Y7O0Vd7e2d3bdw8On3SSKUJ9kvBEtSOsKWeS+oYZTtupolhEnLai4d3Ub42o0iyRj2ac0lDgvmQxI9hYqeu6WmDOUXCDglSzqjnruhWv5s2Alkm9IBUo0Oy6X0EvIZmg0hCOte7UvdSEOVaGEU4n5SDTNMVkiPu0Y6nEguown10+QadW6aE4UbakQTP190SOhdZjEdlOgc1AL3pT8T+vk5n4KsyZTDNDJZkvijOOTIKmMaAeU5QYPrYEE8XsrYgMsMLE2LDKNoT64svLxD+vXde8h4tK47ZIowTHcAJVqMMlNOAemuADgRE8wyu8Obnz4rw7H/PWFaeYOYI/cD5/AIeRkns=</latexit><latexit sha1_base64="EP/8fQslvmB9suyCYNmsel//OKo=">AAAB+HicbVBNS8NAEJ34WetX1KOXxSLUS0lFUPFS9OKxgrGFJpTNdtMu3d2E3U2hhP4TLx5UvPpTvPlv3LY5aOuDgcd7M8zMi1LOtPG8b2dldW19Y7O0Vd7e2d3bdw8On3SSKUJ9kvBEtSOsKWeS+oYZTtupolhEnLai4d3Ub42o0iyRj2ac0lDgvmQxI9hYqeu6WmDOUXCDglSzqjnruhWv5s2Alkm9IBUo0Oy6X0EvIZmg0hCOte7UvdSEOVaGEU4n5SDTNMVkiPu0Y6nEguown10+QadW6aE4UbakQTP190SOhdZjEdlOgc1AL3pT8T+vk5n4KsyZTDNDJZkvijOOTIKmMaAeU5QYPrYEE8XsrYgMsMLE2LDKNoT64svLxD+vXde8h4tK47ZIowTHcAJVqMMlNOAemuADgRE8wyu8Obnz4rw7H/PWFaeYOYI/cD5/AIeRkns=</latexit><latexit sha1_base64="EP/8fQslvmB9suyCYNmsel//OKo=">AAAB+HicbVBNS8NAEJ34WetX1KOXxSLUS0lFUPFS9OKxgrGFJpTNdtMu3d2E3U2hhP4TLx5UvPpTvPlv3LY5aOuDgcd7M8zMi1LOtPG8b2dldW19Y7O0Vd7e2d3bdw8On3SSKUJ9kvBEtSOsKWeS+oYZTtupolhEnLai4d3Ub42o0iyRj2ac0lDgvmQxI9hYqeu6WmDOUXCDglSzqjnruhWv5s2Alkm9IBUo0Oy6X0EvIZmg0hCOte7UvdSEOVaGEU4n5SDTNMVkiPu0Y6nEguown10+QadW6aE4UbakQTP190SOhdZjEdlOgc1AL3pT8T+vk5n4KsyZTDNDJZkvijOOTIKmMaAeU5QYPrYEE8XsrYgMsMLE2LDKNoT64svLxD+vXde8h4tK47ZIowTHcAJVqMMlNOAemuADgRE8wyu8Obnz4rw7H/PWFaeYOYI/cD5/AIeRkns=</latexit>
Non
linea
r St
abili
ty: E
xam
ples

37
xB
yBxy
{B}
V
0
AUV Path Following Objective: reduce the error to o!
dy(t)
dt= V (t)
<latexit sha1_base64="MACDnNg7HwZqtTnymacJ7A3qS30=">AAACAnicbVDLSsNAFJ3UV62vqDvdDBahbkoigroQim5cVjBtoSllMpm0QycPZm6EEAJu/BU3LlTc+hXu/Bunj4W2Hrhw5px7mXuPlwiuwLK+jdLS8srqWnm9srG5tb1j7u61VJxKyhwai1h2PKKY4BFzgINgnUQyEnqCtb3RzdhvPzCpeBzdQ5awXkgGEQ84JaClvnngBpLQ3M9qcFLkPhRXLewmiutn36xadWsCvEjsGamiGZp988v1Y5qGLAIqiFJd20qglxMJnApWVNxUsYTQERmwrqYRCZnq5ZMbCnysFR8HsdQVAZ6ovydyEiqVhZ7uDAkM1bw3Fv/zuikEF72cR0kKLKLTj4JUYIjxOBDsc8koiEwTQiXXu2I6JDoU0LFVdAj2/MmLxDmtX9atu7Nq43qWRhkdoiNUQzY6Rw10i5rIQRQ9omf0it6MJ+PFeDc+pq0lYzazj/7A+PwBkXqXBA==</latexit><latexit sha1_base64="MACDnNg7HwZqtTnymacJ7A3qS30=">AAACAnicbVDLSsNAFJ3UV62vqDvdDBahbkoigroQim5cVjBtoSllMpm0QycPZm6EEAJu/BU3LlTc+hXu/Bunj4W2Hrhw5px7mXuPlwiuwLK+jdLS8srqWnm9srG5tb1j7u61VJxKyhwai1h2PKKY4BFzgINgnUQyEnqCtb3RzdhvPzCpeBzdQ5awXkgGEQ84JaClvnngBpLQ3M9qcFLkPhRXLewmiutn36xadWsCvEjsGamiGZp988v1Y5qGLAIqiFJd20qglxMJnApWVNxUsYTQERmwrqYRCZnq5ZMbCnysFR8HsdQVAZ6ovydyEiqVhZ7uDAkM1bw3Fv/zuikEF72cR0kKLKLTj4JUYIjxOBDsc8koiEwTQiXXu2I6JDoU0LFVdAj2/MmLxDmtX9atu7Nq43qWRhkdoiNUQzY6Rw10i5rIQRQ9omf0it6MJ+PFeDc+pq0lYzazj/7A+PwBkXqXBA==</latexit><latexit sha1_base64="MACDnNg7HwZqtTnymacJ7A3qS30=">AAACAnicbVDLSsNAFJ3UV62vqDvdDBahbkoigroQim5cVjBtoSllMpm0QycPZm6EEAJu/BU3LlTc+hXu/Bunj4W2Hrhw5px7mXuPlwiuwLK+jdLS8srqWnm9srG5tb1j7u61VJxKyhwai1h2PKKY4BFzgINgnUQyEnqCtb3RzdhvPzCpeBzdQ5awXkgGEQ84JaClvnngBpLQ3M9qcFLkPhRXLewmiutn36xadWsCvEjsGamiGZp988v1Y5qGLAIqiFJd20qglxMJnApWVNxUsYTQERmwrqYRCZnq5ZMbCnysFR8HsdQVAZ6ovydyEiqVhZ7uDAkM1bw3Fv/zuikEF72cR0kKLKLTj4JUYIjxOBDsc8koiEwTQiXXu2I6JDoU0LFVdAj2/MmLxDmtX9atu7Nq43qWRhkdoiNUQzY6Rw10i5rIQRQ9omf0it6MJ+PFeDc+pq0lYzazj/7A+PwBkXqXBA==</latexit>
Non
linea
r St
abili
ty: E
xam
ples

38
xB
yBxy
{B}
V
0
AUV Path Following Objective: reduce the error to o!
Non
linea
r St
abili
ty: E
xam
ples
1. Lyapunov function candidate
2. Check that V is positive definite
3. Check that dV(t)/dt is neg. def.
Because V(.) is radially unbounded, 0 is GAS!

3-5 Julho Ciência 2017 , Lisbon
Nonlinear Systems: An Introduction to Lyapunov Stability Theory
Antonio Pascoal
Modelação e Simulação, 2017-2018