Nonlinear Robust Decoupling Control Design for TRS
7
Nonlinear Robust Decoupling Control Design for T win Rot or Syste m Q. Ahmed 1 , A.I.Bhatti 2 , S.Iqbal 3 Control and Signal Processing Research Group, CASPR. Dept. of Electronic Engg, M.A.Jinnah University, Islamabad, Pakistan. ( 1 qadeer62, 3 siayubi)@gmail.com, 2 [email protected] Abstract : A new sliding surface has been proposed to handle cross-coupling affects in a twin rotor system. This cross- coupling leads to degraded performance during precise maneuvering and it can be suppressed implicitly either by declaring it as disturbance or explicitly by introducing decoupling techniques. Sliding mode control offers robustness against cross-coupling as well as performance along with the freedom to operate the system in nonlinear range. However, the standard linear H ∞ controller synthesized by loop-shaping design procedure (LSDP) offers robustness at the cost of performance to overcome cross- coupling. The synthesized sliding mode controller has been successfully tested in simulations and verified through implementation on a twin rotor system. NOMENCLATURE . . 1 c 1 N Elevation Angle (rad) Azimuth Angle (rad) ng Vel inhorizontal plane (rad / sec) w Weightof helicopter () l Moment Arm (m) F Centrifugal Force (N) w Main rotor angular velocity (rad / sec) Main rotortorque (N α β β τ Symbol Name Units f 2 f 2 w G c r Frictionaltorquein E levation (N.m) in Azimuth .m) Siderotor torque (N.m) Gravitational torque (N.m) Gyroscopic torque (N.m) Centrifugal torque (N.m) Frictional torque (N.m) Main motor disturbance tor que (N τ τ τ τ τ τ τ 2 1 2 2 Azimuth .m) I Moment of i nertia in Elevation (kg.m ) I Moment of inertia in (kg.m ) I. INTRODUCTION The motivation of this paper lies in cross-couplings residing in the helicopter dynamics. Helicopter is an aircraft that is lifted, propelled and maneuvered by vertical and horizontal rotors. All twin rotor aircrafts have high cross-coupling in all their degrees of motion. Especially the gyroscopic effect on azimuth dynamics prevents precise maneuvers by the operator emphasizing the need to compensate cross-coupling, a task that clearly adds to the workload for the pilot if done manually [1]. The twin rotor system recreates a simplified behavior of a real helicopter with fewer degrees of freedom. In real helicopters the control is generally achieved by tilting appropriately blades of the rotors with the collective and cyclic actuators, while keeping constant rotor speed. To simplify the mechanical design of the system, twin rotor system setup used is designed slightly differently. In this case, the blades of the rotors have a fixed angle of attack, and control is achieved by controlling the speeds of the rotors. As a consequence of this, the twin rotor system has highly nonlinear coupled dynamics. Additionally, it tends to be non minimum phase system exhibiting unstable zero dynamics. This system poses very challenging problem of precise maneuvering in the presence of cross-coupling. It has been extensively investigated under the algorithms ranging from linear robust control to nonlinear control domains. Dutka et al [3] have implemented nonlinear predictive control for tracking control of 2 DOF helicopter. The nonlinear algorithm was based on state-space generalized predictive control. M.Lopez et al [4],[5],[6] have presented control of twin rotor system using feedback linearization techniques like full state linearization and input output linearization. The feedback linearization techniques have been implemented in elevation dynamics and azimuth dynamics were kept at zero which overlooked coupling intentionally. Te-Wei et al [7] have proposed time optimal control for Twin Rotor System. A MIMO system was first decomposed in two SISO systems and coupling was taken as disturbance or change of system parameters. For each SISO system optimal control has been designed that can tolerate 50% changes in the system parameters. The results showed slow tracking of the reference inputs. Jun et al [8] presented robust stabilization and H ∞ control for class of uncertain systems. Quadratic stabilizing controllers for uncertain systems were designed by solving standard H ∞ control problem. This method was verified by implementing on helicopter model for tracking purpose only without taking cross-coupling into account. M.Lopez et al [9] suggested H ∞ controller for helicopter dynamics. First feedback linearization was used for decoupling the inputs and outputs; later system was indentified at higher frequencies, as relative uncertainty increases at higher frequencies. The controller was designed for the system identified at higher frequencies, to deliver results in the presence of uncertainties. Simulation results showed that controller was unable to handle couplings. M.Lopez et al [10] delivered the non linear H ∞ approach for handling the coupling taken as disturbance. This approach considered a nonlinear H ∞ disturbance rejection procedure on Proceedings of the 7th Asian Control Conference, Hong Kong, China, August 27-29, 2009 FrB1.1 978-89-956056-9-1/09/©2009 ACA 937 Authorized licensed use limited to: College of Engineering. Downloaded on October 24, 2009 at 11:20 from IEEE Xplore. Restrictions apply.
-
Upload
nicholas-burris -
Category
Documents
-
view
219 -
download
0
Transcript of Nonlinear Robust Decoupling Control Design for TRS

8/14/2019 Nonlinear Robust Decoupling Control Design for TRS
http://slidepdf.com/reader/full/nonlinear-robust-decoupling-control-design-for-trs 1/6
Nonlinear Robust Decoupling Control Designfor Twin Rotor System
Q. Ahmed 1, A.I.Bhatti 2, S.Iqbal 3
Control and Signal Processing Research Group, CASPR.
Dept. of Electronic Engg, M.A.Jinnah University, Islamabad, Pakistan.(1qadeer62, 3siayubi)@gmail.com, [email protected]
Abstract : A new sliding surface has been proposed to handlecross-coupling affects in a twin rotor system. This cross-coupling leads to degraded performance during precisemaneuvering and it can be suppressed implicitly either bydeclaring it as disturbance or explicitly by introducingdecoupling techniques. Sliding mode control offersrobustness against cross-coupling as well as performancealong with the freedom to operate the system in nonlinearrange. However, the standard linear H
∞ controllersynthesized by loop-shaping design procedure (LSDP) offersrobustness at the cost of performance to overcome cross-coupling. The synthesized sliding mode controller has been
successfully tested in simulations and verified throughimplementation on a twin rotor system.
NOMENCLATURE
. .
1
c
1
N
Elevation Angle (rad) Azimuth Angle (rad)
ng Vel in horizontal plane (rad / sec)w Weight of helicopter ( )l Moment Arm (m) F Centrifugal Force (N)w Mainrotor angular velocity (rad / sec)
Mainrotor torque (N
α β β
τ
Symbol Name Units
f 2
f
2
w
G
c
r
Frictional t orque in Elevation (N.m)
in Azimuth
.m)Siderotor torque (N.m)Gravitational torque (N.m)Gyroscopic torque (N.m)Centrifugal torque (N.m)
Frictional torque (N.m)
Main motor disturbance torque (N
τ
τ τ τ τ
τ τ
21
22 Azimuth
.m) I Moment of inertia in Elevation (kg.m ) I Moment of inertia in (kg.m )
I. INTRODUCTIONThe motivation of this paper lies in cross-couplings
residing in the helicopter dynamics. Helicopter is anaircraft that is lifted, propelled and maneuvered byvertical and horizontal rotors. All twin rotor aircrafts havehigh cross-coupling in all their degrees of motion.Especially the gyroscopic effect on azimuth dynamics
prevents precise maneuvers by the operator emphasizingthe need to compensate cross-coupling, a task that clearlyadds to the workload for the pilot if done manually [1].
The twin rotor system recreates a simplified behavior of a realhelicopter with fewer degrees of freedom. In real helicoptersthe control is generally achieved by tilting appropriately
blades of the rotors with the collective and cyclic actuators,while keeping constant rotor speed. To simplify themechanical design of the system, twin rotor system setup usedis designed slightly differently. In this case, the blades of therotors have a fixed angle of attack, and control is achieved bycontrolling the speeds of the rotors. As a consequence of this,the twin rotor system has highly nonlinear coupled dynamics.Additionally, it tends to be non minimum phase systemexhibiting unstable zero dynamics. This system poses verychallenging problem of precise maneuvering in the presenceof cross-coupling. It has been extensively investigated under the algorithms ranging from linear robust control to nonlinear control domains. Dutka et al [3] have implemented nonlinear
predictive control for tracking control of 2 DOF helicopter.The nonlinear algorithm was based on state-space generalized
predictive control. M.Lopez et al [4],[5],[6] have presentedcontrol of twin rotor system using feedback linearizationtechniques like full state linearization and input outputlinearization. The feedback linearization techniques have beenimplemented in elevation dynamics and azimuth dynamicswere kept at zero which overlooked coupling intentionally.
Te-Wei et al [7] have proposed time optimal control for TwinRotor System. A MIMO system was first decomposed in twoSISO systems and coupling was taken as disturbance or change of system parameters. For each SISO system optimalcontrol has been designed that can tolerate 50% changes in thesystem parameters. The results showed slow tracking of thereference inputs. Jun et al [8] presented robust stabilizationand H ∞ control for class of uncertain systems. Quadraticstabilizing controllers for uncertain systems were designed bysolving standard H ∞ control problem. This method wasverified by implementing on helicopter model for tracking
purpose only without taking cross-coupling into account.M.Lopez et al [9] suggested H ∞ controller for helicopter
dynamics. First feedback linearization was used for decoupling the inputs and outputs; later system wasindentified at higher frequencies, as relative uncertaintyincreases at higher frequencies. The controller was designedfor the system identified at higher frequencies, to deliver results in the presence of uncertainties. Simulation resultsshowed that controller was unable to handle couplings.M.Lopez et al [10] delivered the non linear H ∞ approach for handling the coupling taken as disturbance. This approachconsidered a nonlinear H ∞ disturbance rejection procedure on
Proceedings of the 7th Asian Control Conference,Hong Kong, China, August 27-29, 2009
FrB1.1
978-89-956056-9-1/09/©2009 ACA 937
Authorized licensed use limited to: College of Engineering. Downloaded on October 24, 2009 at 11:20 from IEEE Xplore. Restrictions apply.

8/14/2019 Nonlinear Robust Decoupling Control Design for TRS
http://slidepdf.com/reader/full/nonlinear-robust-decoupling-control-design-for-trs 2/6

8/14/2019 Nonlinear Robust Decoupling Control Design for TRS
http://slidepdf.com/reader/full/nonlinear-robust-decoupling-control-design-for-trs 3/6

8/14/2019 Nonlinear Robust Decoupling Control Design for TRS
http://slidepdf.com/reader/full/nonlinear-robust-decoupling-control-design-for-trs 4/6
22 4
2 4 5 6 2 44 2 2
2 4 2 6
1[ (- ) ( (( )
- ))]
eqT c
u x c x a xc T I
b x B x
= − + +
+
(15)
The control input vector ‘U’ that will make the system toconverge at 0S = can be written as in (16), this controllaw will ensure the system convergence to slidingmanifold along with robustness against the cross-
couplings.1 1 11
2 2 22
( )
( )eq
eq
u K sign suU
u K sign su
− = = −
(16)
To avoid high frequency switching i.e. chattering,implementation of the control laws have been performed
by employing saturation function ( ) sat S [18] defined as
1 11
1 11
sat(s )= sign( ); abs( )>1
sat(s ) = ; abs( )<1
s sif
s sif
ε ε
ε ε
(17)
The chattering reduction depends on value of ‘ 1ε < ’ butat the cost of robustness, the more the value of ε , thelesser will be chattering but at the same time robustnesswill be reduced.
As we know, angular positions and velocities inthe dynamical model always remain bounded due to themechanical structure limitations therefore systemuncertainty always remains bounded. Owing to the factor described above, bounded uncertainties and perturbationsin the elevation dynamics can be introduced as
1 1 1
1 1 1 1 1 1
g g g T T T B B B
a a a b b b
= + Δ = + Δ
= + Δ = + Δ
For azimuth dynamics the perturbation and boundeduncertainties are taken as
2 2 2 2 2 2
2 2 2
b b b B B Ba a a
= + Δ = + Δ
= + Δ
The cross-coupling affects in the elevation and azimuthdynamics can be taken as
3 3 1 x x ξ = + (18)
6 6 2 x x ξ = + (19) where 1ξ is azimuth affect on elevation and 2ξ is theelevation affect on azimuth dynamics caused by thegyroscopic torque. Now by replacing control laws definedas (16) in (13) we get
2
3 1 11 1 1 1
2 1 1 1
1)( (
sin ( ) ) g
B x a x b x
T x K sat sV s ξ
+Δ + Δ + Δ
Δ + −
=(20)
22 2 4 2 4 2 6
2 2 2
2 ( ( )
( ))
b x a x B x
K sat s
V sξ
Δ + Δ + Δ +
−
= (21)
Now if 2
1 3 1 1 2 11 1 1) sin( g K T x B x a x b x ξ > + Δ +Δ + Δ + Δ (22)
22 4 2 4 2 6 22 ( ) K b x a x B x ξ > Δ + Δ + Δ + (23)
From the bounds of the system states in (24)
1
2
3
4
5
6
0 0.556
0 0.4363
0 0.1
0 1.112
0.7 0.70 0.35
x
x
x
x
x x
≤ ≤
≤ ≤
≤ ≤
≤ ≤
− ≤ ≤≤ ≤
(24)
and with 50% perturbation in parameters defined in Table 1,we can compute that 1 0.0011 K > for elevation dynamics and
2 0.0018 K > for azimuth dynamics, that will ensure
1
21V s= − (25)
and2
22V s= − (26)
1V in (25) and 2V in (26) will always be negative definite for
non-zero manifolds. The above conditions in (22) and (23)assures that the sliding surface variables reach zero in finite
time and once the trajectories are on the sliding surface theyremain on the surface, and approaches to the equilibrium
points exponentially thus proving the robustness of thedesigned controller for the helicopter system.
In the first phase of controller validation the simulationsare carried out. The controller based on the bounds defined in(22) and (23) delivered regulation control of twin rotor systemas shown in Fig.5 along with sliding manifolds convergence.The convergence of states with in finite time with controller effort with in desired range declares the designed controller ready for implementation.
IV. EXPERIMENTAL RESULTS
A. System DescriptionThe implementation of designed controller is carried
out on the system shown in Fig.6. This system is hinged at the based, thus restricting the six degrees of motion to two degreesof freedom. This model consists of two DC motors whichdrive upper and side propeller by generating torques
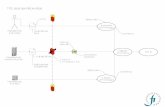
perpendicular to their rotation. The system has two degrees of freedom i.e. elevation( )α in vertical plane and azimuth ( ) β inhorizontal plane, which are measured precisely by incrementalencoders installed inside the helicopter body. The model isinterfaced with desktop computer via data acquisition PCIcard which is accessible in MATLAB Simulink environmentthrough Real-time Toolbox. This toolbox provides us theliberty to access the encoder values and issue commands toDC motors. The schematic diagram shown in Fig.7 gives a
brief idea about the helicopter model interfacing. The systemis controlled by changing the angular velocities of the rotors.This kind of action involves the generation of resultant torqueon the body of double rotor system that makes it to rotate in
perpendicular direction of the rotor. Some of the systemspecifications are shown in Table 1, more details can be foundin [2].
7th ASCC, Hong Kong, China, Aug. 27-29, 2009 FrB1.1
940
Authorized licensed use limited to: College of Engineering. Downloaded on October 24, 2009 at 11:20 from IEEE Xplore. Restrictions apply.

8/14/2019 Nonlinear Robust Decoupling Control Design for TRS
http://slidepdf.com/reader/full/nonlinear-robust-decoupling-control-design-for-trs 5/6
0 1 2 3 4 5 6 7
0
0.2
0.4
0.6
0.8
1
A n g u
l a r
P o s i t i o n s
( r a d )
ElevationAzimuth
0 1 2 3 4 5 6 7-0.2
0
0.2
0.4
0.6
0.8
Time (sec)
S l i d i n g
S u r f a c e
Fig.5 Regulation of the output states of twin rotor system
Table 1 System specifications
System Outputs 50 o in elevation±40 o in Azimuth
Main Motor ‘1’ DC motor with permanent magnetMax Voltage 12VMax Speed 9000 RPM
Side Motor ‘2’ DC motor with permanent magnetMax Voltage 6VMax Speed 12000 RPM
System Parameters T 1 = 0.3 sa1 = 0.105 N.m/MU
b1 = 0.00936 N.m/MU 2 I1 = 4.37e-3 Kg.m 2 B1 = 1.84e-3 Kg.m 2/sTg = 3.83e-2 N.mT2 = 0.25 sa2 = 0.033 N.m/MU
b2 = 0.0294 N.m/MU 2;Tor = 2.7 sT pr = 0.75 sK r = 0.00162 N.m/MUI2 = 4.14e-3 Kg.m 2 B2 = 8.69e-3 Kg.m 2/sK gyro = 0.015 Kg.m/s
Controller Parameters K 1 =1.2K 2 =1.15
c1 =2
c2 =0.9c3 =10
c4 =9
B. Controller ImplementationThe implementation of the sliding mode controller
designed in (16) delivered the output states response asshown in Fig.8 along with respective efforts. It can beobserved that the equilibrium state in vertical plane isachieved in 7 sec. The coupling in horizontal plane isintroduced at 22 sec. It can be seen that equilibrium
position in horizontal plane is maintained by thecontroller with the divergence of 1 degree for about 5 secafter the coupling has been introduced. However,Hadamard weighted H ∞ delivered the results shown in
Fig.9. The settling time in both cases is same however thecross-coupling in later case has prolonged affects on the performance. The system recovers in 7sec. with thedeviation of 3-4 deg. in horizontal plane when exposed tocross-coupling at 32 sec. The performance indices for elevation and azimuth dynamics in Table 2 analyticallycertify the improved performance of the twin rotor systemdynamics with sliding mode control after the introductionof cross-coupling.
Fig.6 Lab setup for Twin rotor system
Fig.7 Schematic diagram of Helicopter model
The linear nature of H ∞ controller restricts it to operate innonlinear range. Especially Hadamard weighted H ∞ wasunable to govern the system to equilibrium position fromnonlinear range. Traditionally weighted H ∞ successfullydragged the system to equilibrium position both in vertical andhorizontal planes, when released from nonlinear range asshown in Fig.10. Sliding mode controller for twin rotor system
proposed in this paper guides the system both in vertical andhorizontal planes to equilibrium positions as shown in Fig.11.The results show that the system when released at 40 deg.initially in horizontal plane, Traditionally weighted H ∞ (Fig.10) drags the system to -40 deg. and then guides it toequilibrium position with the settling time around 15 sec.However sliding mode controller (Fig.11) governs the system,released nonlinear range of horizontal plane to equilibrium
point with in 5 sec. The linear robust controller exerted moreeffort (Fig.10) to deliver required results as compared tosliding mode controller (Fig.11). The sliding mode controlclearly delivers better results than H ∞ designed either traditional or Hadamard weights. The cross-coupling is wellhandled along with the governing of system from nonlinear range to equilibrium positions.
Table 2 Performance indices of Elevation/Azimuth Dynamics
H ∞ with
Normal Wt
H ∞ with
Hadamard Wt
Elevation
SMC
Performa
nce
Indices α β α β α β
ISE 46.14 0.403 24.85 3.12 24.05 0.195
ITSE 287.7 14.59 82.97 107.7 75.35 5.4
IAE 4.387 0.311 2.334 0.86 2.012 0.267
ITAE 44.92 11.61 18.01 31.51 10.56 8.232
7th ASCC, Hong Kong, China, Aug. 27-29, 2009 FrB1.1
941
Authorized licensed use limited to: College of Engineering. Downloaded on October 24, 2009 at 11:20 from IEEE Xplore. Restrictions apply.

8/14/2019 Nonlinear Robust Decoupling Control Design for TRS
http://slidepdf.com/reader/full/nonlinear-robust-decoupling-control-design-for-trs 6/6
10 20 30 40 500
5
10
15
20
25Elevation
A n g u
l a r
P o s
i t i o n
( d e g
)
10 20 30 40 500.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
Time (sec)
C o n
t r o
l l e r
E f f o r t ( V
)
0 10 20 30 40 50 60-40
-20
0
20
40Azimuth
10 20 30 40 500.2
0.4
0.6
0.8
1
1.2
Time (sec)
Fig.8 Actual system response (SMC)
10 20 30 400
5
10
15
20
25
A n g u
l a r
P o s
i t i o n
( d e g
)
Elevation
10 20 30 400
0.2
0.4
0.6
0.8
1
Time (sec)
C o n
t r o
l l e r
E f f o r t
( V )
10 20 30 40-40
-20
0
20
40Azimuth
10 20 30 40-1
-0.5
0
0.5
1
Time (sec) Fig.9 Actual system response (Hadamard Weighted H ∞ )
10 20 30 40 500
5
10
15
20
25
A n g u
l a r
P o s
i t i o n
( d e g
)
Elevation
10 20 30 40 500.2
0.4
0.6
0.8
1
Time (sec)
C o n
t r o l l e r
E f f o r t
( V )
10 20 30 40 50-80
-60
-40
-20
0Azimuth
10 20 30 40 50-1.5
-1
-0.5
0
0.5
1
1.5
Time (sec) Fig.10 Actual system response initialized in nonlinear range (Traditional
Weighted H ∞ )
10 20 30 40 500
5
10
15
20
25Elevation
A n g u
l a r
P o s i t i o n
( d e g
)
10 20 30 40 500.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
Time (sec)
C o n
t r l l e r
E f f o r t ( V
)
10 20 30 40 50-10
0
10
20
30
40
50Azimuth
10 20 30 40 500.4
0.6
0.8
1
1.2
1.4
1.6
1.8
Time (sec)
Fig.11 Actual system response initialized in nonlinear range (SMC)
V. CONCLUSIONThe proposed sliding surface successfully delivers the solutionto deal with cross-coupling inherent in the twin rotor dynamics. The sliding mode control provides the desired
performance along with the robustness against the couplingdeclared as disturbance. Although, simulations basedcontroller effort results were free of chattering but theimplementation showed that chattering is reduced to availablerange thus feasible for the hardware. However, the linear counterpart controllers delivered results either at the cost of robustness or performance. The performance indices for elevation and azimuth dynamics in Table 2 analytically certifythe improved performance of the twin rotor system dynamicswith sliding mode control after the introduction of cross-coupling.
REFERENCES[1]. Gareth D. Padfield, “ Helicopter Flight Dynamics The Theory and
Application of Flying Qualities and Simulation Modeling ” Second EditionBlackwell Publishing.
[2]. Humusoft, CE 150 helicopter model: User's Manual ,Humusoft , Prague,2002
[3]. Arkadiusz S. Dutka, Andrzej W.Ordys, Michael J.Grimble " Non-linear Predictive Control of 2 dof helicopter model " Proc. of the 42nd IEEEConference on Decision and Control Maui, Hawaii USA, 2003
[4]. M. Lopez-Martinez, F.R Rubio, “ Control of a laboratory helicopter using feedback linearization ”
[5]. M. L´opez-Martinez, J.M. D´ ı az, M.G. Ortega and F.R. Rubio, “ Control of a Laboratory Helicopter using Switched 2-step Feedback
Linearization ”, Proc. of the American Control Conf. (ACC’04),2004.[6]. M. Lopez-Martinez, F.R Rubio, “ Approximate feedback linearization of
a Laboratory Helicopter ”[7]. Te-Wei, Peng Wen, “ Time Optimal and robust control of Twin rotor
system ” Proc. of 2007 IEEE Int. Conf. on Control and Automation,Guangzhou, China, 2007 .
[8]. Jun Yoneyama, Yukihisa Kikuchi, “ Robust control for uncertain systemswith application to helicopter model ” Proc. of the SICE 2002, Osaka.
[9]. M. Lopez-Martinez, M.G. Ortega and F.R. Rubio, “An H ∞ Controller of the Twin Rotor Laboratory equipment” , Proc. of 11th IEEE InternationalConference on Emerging Technologies and Factory Automation
(ETFA’03), 2003.[10]. M. Lopez-Martinez, C. Vivas, M. G. Ortega, “ A multivariable nonlinear H ∞ controller for Laboratory helicopter ”. Proc. of 44 th IEEE conferenceon Decision and Control and European Control Conference 2005, SevilleSpain 2005.
[11]. Tomáš Koudela, Renata Wagnerová, “Position Control with Robust Algorithms” Proc. of the Portuguese conf. on Automatic Control, 2000.
[12]. Gwo-R.Y, H.T.Lui, Sliding mode control of a two degree of freedomhelicopter via Linear Quadratic regulator.
[13]. Juhng-Perng Su Chi-Ying Liangt and Hung-Ming Chent, “ Robust Control of a Class of Nonlinear System and Its Application to a Twinlbtor MIMO System ” IEEE ICIT’O2, Bangkok, Thailand.2002.
[14]. Q. Ahmed , A. I. Bhatti, S. Iqbal, Robust Decoupling Control Design for Twin Rotor System using Hadamard Weights , to be presented in CCA,MSC 2009, St. Petersburg, Russia
[15]. F.Van Diggelen and K. Glover, “ A Hadamard weighted loop shaping design procedure for robust decouplin g” Automatica Vol. 30, No. 5, pp831-845 1994.
[16]. Q. G. Wang, “ Decoupling control” LNCIS 285,pp 115-128 2003
[17]. Eds. K. Warwick,D. Rees, “Multivariable Control:An Introduction To Decoupling Control ” Industrial Digital Control Systems IEE ControlEngineering series, Peter Peregrinus 1988 .
[18]. Slotine, J. J. and Li W. (1991), Applied Nonlinear Control , PrenticeHall, ISBN 0-13-040-890-5
7th ASCC, Hong Kong, China, Aug. 27-29, 2009 FrB1.1
942