Nonlinear Optimization: Introduction Linear vs. nonlinear ...Nonlinear Optimization: Introduction...
6
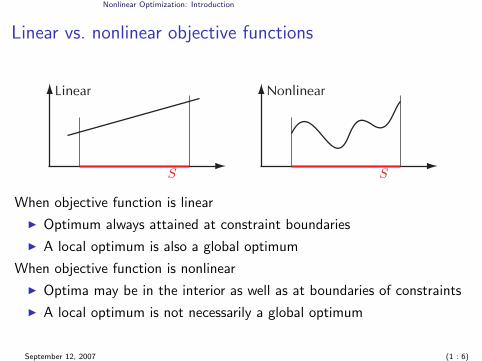
Nonlinear Optimization: Introduction Linear vs. nonlinear objective functions S Linear S Nonlinear When objective function is linear Optimum always attained at constraint boundaries A local optimum is also a global optimum When objective function is nonlinear Optima may be in the interior as well as at boundaries of constraints A local optimum is not necessarily a global optimum September 12, 2007 (1 : 6)
Transcript of Nonlinear Optimization: Introduction Linear vs. nonlinear ...Nonlinear Optimization: Introduction...
Nonlinear Optimization: Introduction
Linear vs. nonlinear objective functions
S
Linear
S
Nonlinear
When objective function is linear
I Optimum always attained at constraint boundaries
I A local optimum is also a global optimum
When objective function is nonlinear
I Optima may be in the interior as well as at boundaries of constraints
I A local optimum is not necessarily a global optimum
September 12, 2007 (1 : 6)
Nonlinear Optimization: Introduction
Convexity and optimality
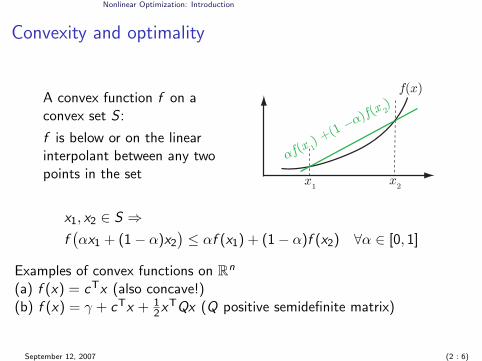
A convex function f on aconvex set S :
f is below or on the linearinterpolant between any twopoints in the set x
1x2
®f(x 1
) +(1 ¡®
)f(x 2)
f(x)
x1, x2 ∈ S ⇒f(αx1 + (1− α)x2
)≤ αf (x1) + (1− α)f (x2) ∀α ∈ [0, 1]
Examples of convex functions on Rn
(a) f (x) = cTx (also concave!)(b) f (x) = γ + cTx + 1
2xTQx (Q positive semidefinite matrix)
September 12, 2007 (2 : 6)
Nonlinear Optimization: Introduction
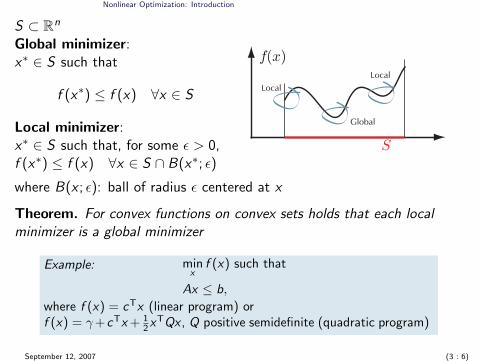
S ⊂ Rn
Global minimizer:x∗ ∈ S such that
f (x∗) ≤ f (x) ∀x ∈ S
Local minimizer:x∗ ∈ S such that, for some ε > 0,f (x∗) ≤ f (x) ∀x ∈ S ∩ B(x∗; ε)
S
Global
LocalLocal
f(x)
where B(x ; ε): ball of radius ε centered at x
Theorem. For convex functions on convex sets holds that each localminimizer is a global minimizer
Example: minx
f (x) such that
Ax ≤ b,
where f (x) = cTx (linear program) orf (x) = γ+cTx + 1
2xTQx , Q positive semidefinite (quadratic program)
September 12, 2007 (3 : 6)
Nonlinear Optimization: Introduction
Proof. Let x∗ be a local minimizer. Then ∃ε > 0 s. t.f (x∗) ≤ f (x) ∀x ∈ S ∩ B(x∗; ε).
Let x ∈ S arbitrarily. Will show f (x∗) ≤ f (x).
S convex ⇒ αx + (1− α)x∗ = xα ∈ S ∀α ∈ [0, 1]
Choose α > 0 such that xα ∈ S ∩ B(x∗; ε)
x∗ local min ⇒
f (x∗) ≤ f (xα) = f(αx + (1− α)x∗
)≤ [f convex]
≤ αf (x) + (1− α)f (x∗),
that is,
αf (x∗) ≤ αf (x) α > 0 ⇒f (x∗) ≤ f (x)
�
September 12, 2007 (4 : 6)
Nonlinear Optimization: Introduction
Unconstrained optimization
Will start to consider unconstrained optimization
minx∈Rn
f (x) or, equivalently,Find x∗ ∈ Rn such that
f (x∗) ≤ f (x) ∀x ∈ Rn
Function f is nonlinear in x . Unconstrained optimization meaningless forlinear f , since linear f on Rn are unbounded or constant
Most common application for unconstrained optimization: inverseproblems, parameter estimation
September 12, 2007 (5 : 6)
Nonlinear Optimization: Introduction
Unconstrained optimization: example application
I At time intervals t1, t2, . . . , tm a physical process generates a timesequence of m observations (measurements) b1, b2, . . . , bm
I A model of the process says that bk ≈ b(tk) where
b(t) = x1 + x2ex3t + x4e
x5t
I Model not exact: measuring errors (noise), modeling errors
I We want to find the coefficients x1, . . . , x5 that best matches theobservations
I Define the residual rk = bk − (x1 + x2ex3tk + x4e
x5tk ) and solve theunconstrained optimization problem
minx1,...,x5
m∑k=1
r2k
September 12, 2007 (6 : 6)