Nonlinear Control And Servo Systems
74
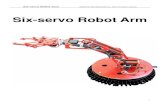
Nonlinear Control and Servo Systems Lecture 1 • Nonlinear Phenomena and Stability theory • Nonlinear phenomena – finite escape time – peaking • Stability theory – Lyapunov Theory revisited – exponential stability – quadratic stability – time-varying systems – invariant sets – center manifold theorem Existence problems of solutions Example: The differential equation dx dt = x 2 , x(0)= x 0 has the solution x(t)= x 0 1 - x 0 t , 0 ≤ t < 1 x 0 Finite escape time t f = 1 x 0 Finite Escape Time 0 1 2 3 4 5 0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 5 Time t x(t) Finite escape time of dx/dt = x 2 1
description
Nonlinear Phenomena and Stability theory
Transcript of Nonlinear Control And Servo Systems

Nonlinear Control and Servo Systems
Lecture 1
• Nonlinear Phenomena and Stability theory
• Nonlinear phenomena
– finite escape time– peaking
• Stability theory
– Lyapunov Theory revisited– exponential stability– quadratic stability– time-varying systems– invariant sets– center manifold theorem
Existence problems of solutions
Example: The differential equation
dx
dt= x2, x(0) = x0
has the solution
x(t) =x0
1− x0t, 0 ≤ t <
1x0
Finite escape time
t f =1x0
Finite Escape Time
0 1 2 3 4 50
0.5
1
1.5
2
2.5
3
3.5
4
4.5
5
Time t
x(t)
Finite escape time of dx/dt = x2
1

The peaking phenomenon
Example: Controlled linear system with right-half plane zero
Feedback can change location of poles but not location of zero(unstable pole-zero cancellation not allowed).
Gcl(s) =(−s+ 1)ω 2os2 + 2ω os+ ω 2o
(1)
A step response will reveal a transient which grows in ampli-tude for faster closed loop poles s = −ω o, see Figure on nextslide.
The peaking phenomenon – cont.
0 1 2 3 4 5 6−2
−1.5
−1
−0.5
0
0.5
1
ω o = 1
ω o = 2ω o = 5
Step responses for the system in Eq. (1), ω o = 1,2, and 5.Faster poles gives shorter settling times, but the transients
grow significantly in amplitude, so called peaking.
The peaking phenomenon – cont.
Note!
• Linear case: Performance may be severely deteriorated bypeaking, but stability still guaranteed.
• Nonlinear case: Instability and even finite escape timesolutions may occur.
What bandwidth constraints does a non-minimum zero imposefor linear systems? See e. g., [Freudenberg and Looze, 1985;Åström, 1997; Goodwin and Seron, 1997]
The peaking phenomenon – cont.
We will come back to the peaking phenomenon for
• cascaded systems [Kokotovic & Sussman ’91]
• observers [observer backstepping]
2

Alexandr Mihailovich Lyapunov (1857–1918)
Master thesis “On the stability of ellipsoidal forms of equilib-rium of rotating fluids,” St. Petersburg University, 1884.
Doctoral thesis “The general problem of the stability of motion,”1892.
Lyapunov formalized the idea:
If the total energy is dissipated, the system must be stable.
Main benefit: By looking at an energy-like function ( a so calledLyapunov function), we might conclude that a system is stableor asymptotically stable without solving the nonlinear differ-ential equation.
Trades the difficulty of solving the differential equation to:
“How to find a Lyapunov function?”
Many cases covered in [Rouche et al, 1977]
Stability Definitions
An equilibrium point x = 0 of x = f (x) is
locally stable , if for every R > 0 there exists r > 0, such that
ix(0)i < r ; ix(t)i < R, t ≥ 0
locally asymptotically stable , if locally stable and
ix(0)i < r ; limt→∞x(t) = 0
globally asymptotically stable , if asymptotically stable for allx(0) ∈ Rn.
Lyapunov Theorem for Local Stability
Theorem Let x = f (x), f (0) = 0, and 0 ∈ Ω ⊂ Rn. Assumethat V : Ω → R is a C1 function. If
• V (0) = 0
• V (x) > 0, for all x ∈ Ω, x = 0
• ddtV (x) ≤ 0 along all trajectories in Ω
then x = 0 is locally stable. Furthermore, if also
• ddtV (x) < 0 for all x ∈ Ω, x = 0
then x = 0 is locally asymptotically stable.
Proof: Read proof in [Khalil] or [Slotine].
3

Lyapunov Functions ( Energy Functions)
A Lyapunov function fulfills V (x0) = 0, V (x) > 0 for x ∈ Ω,x = x0, and
V(x) =d
dtV (x) =
dV
dxx =
dV
dxf (x) ≤ 0
V = constant
x1
x2
V
Lyapunov Theorem for Global Stability
Theorem Let x = f (x) and f (0) = 0. Assume that V : Rn → Ris a C1 function. If
• V (0) = 0
• V (x) > 0, for all x = 0
• V(x) < 0 for all x = 0
• V (x) → ∞ as ixi → ∞ radially unbounded
then x = 0 is globally asymptotically stable.
Note! Can be only one equilibrium.
Radial Unboundedness is Necessary
If the condition V (x) → ∞ as ixi → ∞ is not fulfilled, thenglobal stability cannot be guaranteed.
Example Assume V (x) = x21/(1 + x21) + x22 is a Lyapunovfunction for a system. Can have ixi → ∞ even if V(x) < 0.
Contour plot V (x) = C:
−10 −8 −6 −4 −2 0 2 4 6 8 10−2
−1.5
−1
−0.5
0
0.5
1
1.5
2
x1
x2
Example – saturated control
Exercise 5 min
Find a bounded control signal u = sat(v), which globallystabilizes the system
x1 = x1x2
x2 = u
u = sat (v(x1, x2))(2)
What is the problem with using the ’standard candidate’
V1 = x21/2+ x22/2 ?
Hint: Use the Lyapunov function candidate
V2 = log(1+ x21) + α x22for some appropriate value of α .
4

Lyapunov Function for Linear System
Theorem The eigenvalues λ i of A satisfy Re λ i < 0 if and onlyif: for every positive definite Q = QT there exists a positivedefinite P = PT such that
PA+ ATP = −Q
Proof of ∃Q, P ; Re λ i(A) < 0: Consider x = Ax and theLyapunov function candidate V (x) = xTPx.
V(x) = xTPx+ xTPx = xT(PA+ATP)x = −xTQx < 0, ∀x = 0
; x = Ax asymptotically stable :; Reλ i < 0
Proof of Re λ i(A) < 0; ∃Q, P: Choose P =∫ ∞
0 eAT tQeAtdt
Linear Systems – cont.
Discrete time linear system:
x(k+ 1) = Φx(k)
The following statements are equivalent
• x = 0 is asymptotically stable
• hλ ih < 0 for all eigenvalues of Φ
• Given any Q = QT > 0 there exists P = PT > 0, which isthe unique solution of the (discrete Lyapunov equation
ΦTPΦ − P = Q
Exponential Stability
The equilibrium point x = 0 of the system x = f (x) is said tobe exponentially stable if there exist c, k,γ such that for everyt ≥ t0 ≥ 0, ix(t0)i ≤ c one has
ix(t)i ≤ kix(t0)ie−γ (t−t0)
It is globally exponentially stable if the condition holds forarbitrary initial states.
For linear systems asymptotic stability implies global exponen-tial stability.
“Comparison functions– class K ”
The following two function classes are often used as loweror upper bounds on growth condition of Lyapunov functioncandidates and their derivatives.
DEFINITION 1—CLASS K FUNCTIONS [KHALIL, 1996]A continuous function α : [0, a) → IR+ is said to belong to classK if it is strictly increasing and α (0) = 0. It is said to belong toclass K ∞ if a = ∞ and lim
r→∞α (r) = ∞.
Common choice is α i(hhxhh) = kihhxhhc, k, c > 0
5

“Comparison functions– class K L”
DEFINITION 2—CLASS K L FUNCTIONS [KHALIL, 1996]A continuous function β : [0, a) IR+ → IR+ is said to belongto class K L if for each fixed s the mapping β(r, s) is a classK function with respect to r, and for each fixed r the mappingβ(r, s) is decreasing with respect to s and lim
s→∞β(r, s) = 0. The
function β(⋅, ⋅) is said to belong to class K L∞ if for each fixeds, β(r, s) belongs to class K ∞ with respect to r.
For exponential stability β(hhxhh, t) = .... (fill in)
Lyapunov Theorem for Exponential Stability
Let V : Rn → R be a continuously differentiable function and letki > 0, c > 0 be numbers such that
k1hxhc ≤ V (x) ≤ k2hxh
c
VV
Vxf (t, x) ≤ −k3hxh
c
for t ≥ 0, ixi ≤ r. Then x = 0 is exponentially stable.
If r is arbitrary, then x = 0 is globally exponentially stable.
Proof
V =VV
Vxf (t, x) ≤ −k3hxh
c ≤ −k3
k2V
V (x) ≤ V (x0)e−(k3/k2)(t−t0) ≤ k2hx0h
ce−(k3/k2)(t−t0)
hx(t)h ≤
(
V
k1
)1/c
≤
(
k2
k1
)1/c
hx0he−(k3/k2)(t−t0)/c
Quadratic Stability
Suppose there exists a P > 0 such that
0 > (A+ B∆ iC)′P + P(A+ B∆ iC) for all i
Then the system
x = [A+ B∆(x, t)C]x
is globally exponentially stable for all functions ∆ satisfying
∆(x, t) ∈ conv∆1, . . . , ∆m
for all x and t
6

Aircraft Example
2
K1
+
+
K
-
-n z
αlim
e1
e2
α
2δ
1
q, α
δ
max
r
δ
(Branicky, 1993)
Piecewise linear system
Consider the nonlinear differential equation
x =
A1x if x1 < 0
A2x if x1 ≥ 0
with x = (x1, x2). If the inequalities
A∗1P + PA1 < 0
A∗2P + PA2 < 0
P > 0
can be solved simultaneously for the matrix P, then stability isproved by the Lyapunov function x∗Px
Matlab Session
Copy /home/kursolin/matlab/lmiinit.m to the currentdirectory or download and install the IQCbeta toolbox fromhttp://www.control.lth.se/∼cykao.
>> lmiinit
>> A1=[-5 -4;-1 -2];
>> A2=[-2 -1; 2 -2];
>> p=symmetric(2);
>> p>0;
>> A1’*p+p*A1<0;
>> A2’*p+p*A2<0;
>> lmi_mincx_tbx
>> P=value(p)
P =
0.0749 -0.0257
-0.0257 0.1580
Trajectory Stability Theorem
Let f be differentiable along the trajectory x(t) of the system
x = f (x, t)
Then, under some regularity conditions on x(t), exponentialstability of the linear system x(t) = A(t)x(t) with
A(t) =V f
Vx(x(t), t)
implies that
hx(t) − x(t)h
decays exponentially for all x in a neighborhood of x.
7

Time-varying systems
Note that autonomous systems only depends on (t − t0) whilesolutions for non-autonomous systems may depend on t0 and tindependently.
A second order autonomous system can never have “non-simply intersecting” trajectories ( A limit cycle can never be a’figure eight’ )
Stability definitions for time-varying systems
An equilibrium point x = 0 of x = f (x, t) is
locally stable at t0, if for every R > 0 there exists r =r(R, t0) > 0, such that
ix(t0)i < r ; ix(t)i < R, t ≥ t0
locally asymptotically stable at time t0, if locally stable and
ix(t0)i < r(t0) ; limt→∞x(t) = 0
globally asymptotically stable , if asymptotically stable for allx(t0) ∈ Rn.
A system is said to be uniformly stable if r can be indepen-dently chosen with respect to t0, i. e., r = r(R).
Example of non-uniform convergence [Slotine, p.105/Khalilp.134]
Consider
x = −x/(1 + t)
which has the solution
x(t) =1+ t01+ t
x(t0) ; hx(t)h ≤ hx(t0)h ∀t ≥ t0
The solution x(t) → 0, but we can not get a ’decay rate estimate’independently of t0.
Time-varying Lyapunov Functions
Let V : Rn+1 → R be a continuously differentiable function andlet ki > 0, c > 0 be numbers such that
k1hxhc ≤ V (t, x) ≤ k2hxh
c
VV
V t(t, x) +
VV
Vx(t, x) f (t, x) ≤ −k3hxh
c
for t ≥ 0, ixi ≤ r. Then x = 0 is exponentially stable.
If r is arbitrary, then x = 0 is globally exponentially stable.
8

Time-varying Linear Systems
The following conditions are equivalent
• The system x(t) = A(t)x(t) is exponentially stable
• There exists a symmetric matrix function P(t) > 0 suchthat
−I ≥ P(t) + A(t)′P(t) + P(t)A(t)
for all t.
Proof
Given the second condition, let V (x, t) = x′P(t)x. Then
V (x) =VV
V t+
VV
VxAx = x′(P + A′P + PA)x < −hxh2
so exponential stability follows the Lyapunov theorem.
Conversely, given exponential stability, let Φ(t, s) be thetransition matrix for the system. Then the matrix P(t) =∫ ∞
tΦ(t, s)′Φ(t, s)ds is well-defined and satisfies
−I = P(t) + A(t)′P(t) + P(t)A(t)
Lyapunov’s first theorem revisited
Suppose the time-varying system
x = f (x, t)
has an equilibrium x = 0, where V2 f /Vx2 is continuous anduniformly bounded as a function of t.
Then the equilibrium is exponentially stable provided that thisis true for the linearization x(t) = A(t)x(t) where
A(t) =V f
Vx(0, t)
Proof
The system can be written
x(t) = f (x, t) = A(t)x(t) + o(x, t)
where ho(x, t)h/hxh → 0 uniformly as hxh → 0. Choose P(t) > 0with
P(t) + A(t)′P(t) + P(t)A(t) ≤ −I
and let V (x) = x′Px. Then
VV
Vxf (x) = x′(P + A′P+ PA)x + 2x′P(t)o(x, t) < −hxh2/2
in a neighborhood of x = 0. Hence Lyapunov’s theorem provesexponential stability.
9

Proof of Trajectory Stability Theorem
Let z(t) = x(t) − x(t). Then z = 0 is an equilibrium and thesystem
z(t) = f (z+ x) − f (x)
The desired implication follows by the time-varying version ofLyapunov’s first theorem.
Lyapunov’s Linearization Method revisited
Recall from Lecture 2 (undergraduate course):
Theorem Considerx = f (x)
Assume that x = 0 is an equilibrium point and that
x = Ax + n(x)
is a linearization.
(1) If Re λ i(A) < 0 for all i, then x = 0 is locally asymptoticallystable.
(2) If there exists i such that λ i(A) > 0, then x = 0 isunstable.
Proof of (1) in Lyapunov’s Linearization Method
Lyapunov function candidate V (x) = xTPx. V (0) = 0, V (x) > 0for x = 0, and
V(x) = xTPf (x) + f T(x)Px
= xTP[Ax + n(x)] + [xTA+ nT(x)]Px
= xT(PA+ ATP)x + 2xTPn(x) = −xTQx + 2xTPn(x)
xTQx ≥ λmin(Q)ixi2
and for all γ > 0 there exists r > 0 such that
in(x)i < γ ixi, ∀ixi < r
Thus, choosing γ sufficiently small gives
V(x) ≤ −(
λmin(Q) − 2γ λmax(P))
ixi2 < 0
10

First glimpse of the Center Manifold Theorem
What can we do if the linearization A =V f
Vxhas zeros on the
imaginary axis?
Assume
z1 = A0z1 + f 0(z1, z2)z2 = A−z2 + f −(z1, z2)
A−: asymptotically stable
A0: eigenvalues on imaginary axis
f 0 and f − second order and higher terms.
Center Manifold Theorem Assume z = 0 is an equilibriumpoint. For every k ≥ 2 there exists a Ck mapping ϕ such thatφ(0) = 0 and dφ(0) = 0 and the surface
z2 = φ(z1)
is invariant under the dynamics above.
Proof Idea: Construct a contraction with the center manifoldas fix-point.
Cont
Usage
1) Determine z2 = φ(z1), at least approximately
2) The local stability for the entire system can be proved to bethe same as for the dynamics restricted to a center manifold:
z1 = A0z1 + f 0(z1,φ(z1))
An instability result - Chetaev’s Theorem
Idea: show that a solution arbitrarily close to the origin have toleave
Let f (0) = 0 and let V : D → R be a continuouslydifferentiable function on a neighborhood D of x = 0, suchthat V (0) = 0. Suppose that the set
U = x ∈ D : ixi < r,V (x) > 0
is nonempty for every r > 0. If V > 0 in U , then x = 0 isunstable.
11

Invariant Sets
Definition A set M is called invariant if for the system
x = f (x),
x(0) ∈ M implies that x(t) ∈ M for all t ≥ 0.
x(0)
x(t)
M
Invariant Set Theorem
Theorem Let Ω ∈ Rn be a bounded and closed set that isinvariant with respect to
x = f (x).
Let V : Rn → R be a radially unbounded C1 function such thatV(x) ≤ 0 for x ∈ Ω. Let E be the set of points in Ω whereV(x) = 0. If M is the largest invariant set in E, then everysolution with x(0) ∈ Ω approaches M as t → ∞ (proof onp. 73)
Ω E M
Åström, K. J. (1997): “Limitations on control system performance.” In Proceedings of the European Control Conference(ECC’97), vol. 1. Brussels, Belgium. TUEE4.
Freudenberg, J. and D. Looze (1985): “Right half plane polesand zeros and design tradeoffs in feedback systems.” IEEETransactions on Automatic Control, 30, pp. 555–565.
Goodwin, G. and M. Seron (1997): “Fundamental design tradeoffs in filtering, prediction, and control.” IEEE Transactionson Automatic Control, 42:9, pp. 1240–1251.
Khalil, H. (1996): Nonlinear Systems, 2nd edition. PrenticeHall.
Rouche, N., P. Habets, and M. Laloy (1977): Stability theoryby Liapunov’s direct method. SpringerVerlag, NewYork,Berlin.
12

Nonlinear Control and Servo Systems
Lecture 2
• Lyapunov theory cont’d.
• Storage function and dissipation
• Absolute stability
• The Kalman-Yakubovich-Popov lemma
Invariant Sets
Definition A set M is called invariant if for the system
x = f (x),
x(0) ∈ M implies that x(t) ∈ M for all t ≥ 0.
PSfrag replacements
x(0)x(t)
M
Invariant Set Theorem
Theorem Let Ω ∈ Rn be a bounded and closed set that isinvariant with respect to
x = f (x).Let V : Rn → R be a radially unbounded C1 function such thatV (x) ≤ 0 for x ∈ Ω. Let E be the set of points in Ω whereV (x) = 0. If M is the largest invariant set in E, then everysolution with x(0) ∈ Ω approaches M as t → ∞ (see proof intextbook)
PSfrag replacements
Ω E M
Invariant sets - nonautonomous systems
Problems with invariant sets for nonautonomous systems.
V = VVV t
+ VVVx
f (t, x) depends both on t and x.
1

Barbalat’s Lemma - nonautonomous systems
Let φ : IR → IR be a uniformly continuous function on [0,∞).Suppose that
limt→∞
∫ t
0φ(τ )dτ
exists and is finite. Then
φ(t) → 0 as t →∞
Common tool in adaptive control.
Nonautonomous systems —-cont’d
[Khalil, Theorem 4.4]
Assume there exists V (t, x) such that
W1(x) ≤︸ ︷︷ ︸positive definite
V (t, x) ≤ W2(x)︸ ︷︷ ︸decrecent
V (t, x) = VVV t
+ VVVx
f (t, x) ≤ W3(x)
W3 is a continuous positive semi-definite function.
Solutions to x = f (t, x) starting in x(t0) ∈ x ∈ Brh... arebounded and satisfy
W3(x(t)) → 0 t →∞
See example 4.23 in Khalil (2nd ed).
An instability result - Chetaev’s Theorem
Let f (0) = 0 and let V : D → R be a continuouslydifferentiable function on a neighborhood D of x = 0, suchthat V (0) = 0. Suppose that the set
U = x ∈ D : ixi < r, V (x) > 0is nonempty for every r > 0. If V > 0 in U , then x = 0 isunstable.
PSfrag replacements
V > 0
dV/dt > 0
Dissipativity
Consider a nonlinear system
x(t) = f (x(t), u(t), t), t ≥ 0y(t) = h(x(t), u(t), t)
and a locally integrable function
r(t) = r(u(t), y(t), t).
The system is said to be dissipative with respect to the supplyrate r if there exists a storage function S(t, x) such that for allt0, t1 and inputs u on [t0, t1]
S(t0, x(t0)) +∫ t1
t0
r(t)dt ≥ S(t1, x(t1)) ≥ 0
2

Example—Capacitor
A capacitor
i = Cdudt
is dissipative with respect to the supply rate r(t) = i(t)u(t).A storage function is
S(u) = Cu2
2
In fact
Cu(t0)22
+∫ t1
t0
i(t)u(t)dt = Cu(t1)22
Example—Inductance
An inductance
u = Ldidt
is dissipative with respect to the supply rate r(t) = i(t)u(t).A storage function is
S(i) = Li2
2
In fact
Li(t0)22
+∫ t1
t0
i(t)u(t)dt = Li(t1)22
Memoryless Nonlinearity
The memoryless nonlinearity w= φ(v, t) with sector condition
α ≤ φ(v, t)/v ≤ β , ∀t ≥ 0, v = 0
is dissipative with respect to the quadratic supply rate
r(t) = −[w(t) −α v(t)][w(t) − βv(t)]
with storage function
S(t, x) 0
Linear System Dissipativity
The linear system
x(t) = Ax(t) + Bu(t), t ≥ 0
is dissipative with respect to the supply rate
−[
xu
]T
M[
xu
]
and storage function xT Px if and only if
M +[
AT P + PA PBBT P 0
]≥ 0
3

Storage function as Lyapunov function
For a system without input, suppose that
r(y) ≤ −khxhc
for some k > 0. Then the dissipation inequality implies
S(t0, x(t0)) −∫ t1
t0
khx(t)hcdt ≥ S(t1, x(t1))
which is an integrated form of the Lyapunov inequality
ddt
S(t, x(t)) ≤ −khxhc
Interconnection of dissipative systems
If the two systems
x1 = f1(x1, u1) x2 = f2(x2, u2)are dissipative with supply rates r1(u1, x1) and r2(u2, x2) andstorage functions S(x1), S(x2), then their interconnection
x1 = f1(x1, h2(x2))x2 = f2(x2, h1(x1))
is dissipative with respect to every supply rate of the form
τ1r1(h2(x2), x1) + τ2r2(h1(x1), x2) τ1,τ2 ≥ 0
The corresponding supply rate is
τ1S1(x1) + τ2S2(x2)
Nonlinear Control Theory 2003
Lecture 2B › updated
• Absolute Stability
• Kalman - Yakubovich - Popov Lemma
• Circle Criterion
• Popov Criterion
pp. 237 - 268 + extra material on the K-Y-P Lemma
Global Sector Condition
PSfrag replacements
β
α
ψ
Let ψ (t, y) ∈ R be piecewise continuous in t ∈ [0,∞) andlocally Lipschitz in y ∈ R.
Assume that ψ satisfies the global sector condition
α ≤ψ (t, y)/y ≤ β , ∀t ≥ 0, y = 0 (1)
4

Absolute Stability
+
yu
PSfrag replacements
Σ(A, B, C)
−ψ (t, ⋅)
The system
x = Ax + Bu, t ≥ 0y = Cxu = −ψ (t, y)
(2)
with sector condition (1) is called absolutely stable if the originis globally uniformly asymptotically stable for any nonlinearity ψsatisfying (1).
The Circle Criterion
PSfrag replacements−1/α −1/β
The system (2) with sector condition (1) is absolutely stableif the origin is asymptotically stable for ψ (t, y) = α y and theNyquist plot
C( jω I − A)−1 B + D, ω ∈ Rdoes not intersect the closed disc with diameter [−1/α ,−1/β ].
Loop Transformation
+−
yu
+
+
+
−
yu
PSfrag replacements
G(s)G(s)
ψ
ψK
−K
Common choices: K = α or K = α + β2
Special Case: Positivity
Let M( jω ) = C( jω I − A)−1 B + D, where A is Hurwitz. Thesystem
x = Ax + Bu, t ≥ 0y = Cx + Duu = −ψ (t, y)
with sector condition
ψ (t, y)/y ≥ 0 ∀t ≥ 0, y = 0
is absolutely stable if
M( jω ) + M( jω )∗ > 0, ∀ω ∈ [0,∞)
Note: For SISO systems this means that the Nyquist curve liesstrictly in the right half plane.
5

Proof
Set
V (x) = xT Px, P = PT > 0
; V = 2xT Px
= 2xT P [ A B ][
x−ψ
]≤ 2xT P [ A B ]
[x−ψ
]+ 2ψ y
= 2 [ xT −ψ ][
P 00 I
] [A B−C −D
] [x−ψ
]
By the Kalman-Yakubovich-Popov Lemma, the inequalityM( jω ) + M( jω )∗ > 0 guarantees that P can be chosen tomake the upper bound for V strictly negative for all (x,ψ ) =(0, 0).Stability by Lyapunov’s theorem.
The Kalman-Yakubovich-Popov Lemma
• Exists in numerous versions
• Idea: Frequency dependence is replaced by matrixequations/inequalities or vice versa
The K-Y-P Lemma, version I
Let M( jω ) = C( jω I − A)−1 B + D, where A is Hurwitz. Thenthe following statements are equivalent.
(i) M( jω ) + M( jω )∗ > 0 for all ω ∈ [0,∞)
(ii) ∃P = PT > 0 such that[
P 00 I
] [A BC D
]+[
A BC D
]T [ P 00 I
]< 0
Compare Khalil (5.10-12):
M is strictly positive real if and only if ∃P, W , L, ε :[PA+ AT P PB − CT
BT P − C D + DT
]= −
[ ε P+ LT L LT WWT L WT W
]
——————————————
Mini-version a la [ Slotine& Li ]:
x = Ax + bu, A Hurwitz, (i. e., Reλ i(A) < 0]y = cx
The following statements are equivalent
• Rec( jω I − A)−1b > 0, ∀w ∈ [0,∞)• There exist P = PT > 0 and Q = QT > 0 such that
AT P + PA = −Q
Pb = cT
6

The K-Y-P Lemma, version II
For
[Φ(s)Φ(s)
]=[
CC
](sA− A)−1(B − sB) +
[DD
],
with sA − A nonsingular for some s ∈ C, the following twostatements are equivalent.
The K-Y-P Lemma, version II - cont.
(i) Φ( jω )∗Φ( jω ) + Φ( jω )∗Φ( jω ) ≤ 0 for all ω ∈ R withdet( jω A− A) = 0.
(ii) There exists a nonzero pair (p, P) ∈ R Rnn such thatp≥ 0, P = P∗ and
[A BC D
]∗ [P 00 pI
] [A BC D
]
+[
A BC D
]∗ [P 00 pI
] [A BC D
]≤ 0
The corresponding equivalence for strict inequalities holds withp = 1.
Some Notation Helps
Introduce
M =[
A B]
, M = [ I 0 ] ,
N =[
C D]
, N = [0 I ] .
Then
y = [C( jω I − A)−1 B + D]uif and only if
[yu
]=[
NN
]w
for some w ∈ Cn+m satisfying Mw = jω Mw.
Lemma 1
Given y, z ∈ Cn, there exists an ω ∈ [0,∞) such that y = jω z,if and only if yz∗ + zy∗ = 0.
Proof Necessity is obvious. For sufficiency, assume thatyz∗ + zy∗ = 0. Then
hv∗(y+ z)h2 − hv∗(y− z)h2 = 2v∗(yz∗ + zy∗)v = 0.
Hence y = λ z for some λ ∈ C∪∞. The equality yz∗+ zy∗ = 0gives that λ is purely imaginary.
7

Proof of the K-Y-P Lemma
See handout (Rantzer)
(i) and (ii) can be connected by the following sequence ofequivalent statements.
(a) w∗(N∗ N + N∗ N)w < 0 for w = 0 satisfying Mw = jω Mwwith ω ∈ R.
(b) Θ ∩ P = ∅, where
Θ =(w∗(N∗ N + N∗ N)w, Mww∗M∗ +Mww∗M∗
):
w∗w= 1
P = (r, 0) : r > 0
(c) (conv Θ) ∩P = ∅.
(d) There exists a hyperplane in R Rnn separating Θ fromP , i.e. ∃P such that ∀w = 0
0 > w∗(
N∗ N + N∗ N + M∗PM + M∗PM)
w
Time-invariant Nonlinearity
Let ψ (y) ∈ R be locally Lipschitz in y ∈ R.
Assume that ψ satisfies the global sector condition
α ≤ψ (y)/y ≤ β , ∀t ≥ 0, y = 0
The Popov Criterion
PSfrag replacementsv
βvφ(v)
−2 0 2 4 6 8 10 12 14−12
−10
−8
−6
−4
−2
0
2
PSfrag replacements
ω Im G(iω )
Re G(iω )
− 1β
Suppose that φ : R → R is Lipschitz and 0 ≤ φ(v)/v ≤ β . LetG(iω ) = C(iω I − A)−1 B with A Hurwitz. If there exists η ∈ Rsuch that
Re [(1+ iωη)G(iω )] > − 1β
ω ∈ R (3)
then the differential equation x(t) = Ax(t) − Bφ(Cx(t)) isexponentially stable.
8

Popov proof I
Set
V (x) = xT Px + 2ηβ∫ Cx
0ψ (σ )dσ
where P is an n n positive definite matrix. Then
V = 2(xT P +ηkψ C)x
= 2(xT P +ηβψ C) [ A B ][
x−ψ
]
≤ 2(xT P +ηβψ C) [ A B ][
x−ψ
]− 2ψ (ψ − β y)
= 2 [ xT −ψ ][
PA PB−β C −ηβ CA −1−ηβ CB
] [x−ψ
]
By the K-Y-P Lemma there is a P that makes the upper boundfor V strictly negative for all (x,ψ ) = (0, 0).
Popov proof II
For η ≥ 0, V > 0 is obvious for x = 0.
Stability for linear ψ gives V → 0 and V < 0, so V must bepositive also for η < 0.
Stability for nonlinear ψ from Lyapunov’s theorem.
The Kalman-Yakubovich-Popov lemma – III
Given A ∈ Rnn, B ∈ Rnm, M = M T ∈ R(n+m)(n+m), withiω I − A nonsingular for ω ∈ R and (A, B) controllable, thefollowing two statements are equivalent.
(i)[(iω I − A)−1 B
I
]∗
M
[(iω I − A)−1B
I
]≤ 0 ∀ω ∈ [0,∞)
(ii) There exists a matrix P ∈ Rnn such that P = P∗ and
M +[
AT P + PA PBBT P 0
]≤ 0
Proof techniques
(ii) ;(i) simple
Multiply from right and left by
[(iω I − A)−1 B
I
]
(i) ;(ii) difficult
• Spectral factorization (Anderson)
• Linear quadratic optimization (Yakubovich)
• Find (1, P) as separating hyperplane between the sets([
xu
]T
M[
xu
], x(Ax + Bu)∗ + (Ax + Bu)x∗
): (x, u) ∈ Cn+m
(r, 0) : r > 0
9

The Center Manifold Theorem
[Khalil ch 8]
What can we do if the linearization A = V fVx
has zeros on the
imaginary axis?
Center Manifold Theory
Assume that a system ( possibly via a state space transforma-tion [x] → [yT , zT ]T) can be written as
y = A0 y+ f 0(y, z)z = A−z+ f −(y, z)
A−: asymptotically stable
A0: eigenvalues on imaginary axis
f 0 and f − second order and higher terms.
Note: It is the y-dynamics which relate to zero linearization,NOT the z-dynamics according to notation in Khalil.
Center Manifold Theorem
Assume [yT , zT ]T = 0 is an equilibrium point. For every k ≥ 2there exists a δ k > 0 and Ck mapping h such that h(0) = 0and h′(0) = 0 and the surface
z = h(y) iyi ≤ δ k
is invariant under the dynamics above.
Proof Outline
For any continuously differentiable function hk, globallybounded together with its first partial derivative and withhk(0) = 0, h′(0) = 0, let hk+1 be defined by the equations
y = A0 y+ f 0(y, hk(y))z = A−z+ f −(y, hk(y))
hk+1(y) = z
Under suitable assumptions, it can be verified that this defineshk+1 uniquely. Furthermore, the sequence hi is contractive inthe norm supy hi(y) and the limit h satifies the conditions for acenter manifold.
1

Usage
1) Determine z = h(y), at least approximately.(E.g., do a series expansion and identify coefficients...)
2) The local stability for the entire system can be proved to bethe same as for the dynamics restricted to a center manifold:
y = A0 y+ f 0(y, h(y))
Usage — cont’d
In the case of using series expansion of h(y) = c2 y2+ c3 y3+ ...,you would need to continue (w.r.t the order of the terms) untilyou have been able to determined the local behavior. (Loworder terms dominate locally).
Identify the coefficients fromthe boundary condition [Khalil (8.8, 8.11)]
VhV y(y)[A0 y+ f 0(y, h(y))] − A−h(y) − f −(y, h(y)) = 0
Example
y = zz = −z+ ay2 + byz
Here A0 = 0 and A− = −1. z = h(y) gives
−h+ ay2+ byh− h′h = 0
henceh(y) = ay2 + O(hyh3)
Substituting into the dynamics we get
y = ay2 + O(hyh3)
so x = (0, 0) is unstable for a = 0.
Nonuniqueness
The center manifold need not be unique
Example
y = −y3
z = −z
z = h(y) givesh′y3 = z = h(y)
which has the solutions
h(y) = Ce−1/(2y2)
for all constants C.
2

Department of Automatic ControlLund Institute of Technology
Lecture 4 – Nonlinear Control
Robustness analysis and quadratic inequalities
Robustness analysis and quadratic inequalities
• µ-analysis
• Multipliers
• S-procedure
• Integral Quadratic Constraints
Material
• lecture notes
• A. Megretski and A. Rantzer, System Analysis via IntegralQuadratic Constraints, IEEE Transactions on AutomaticControl, 47:6, 1997
• U. Jönsson, Lecture Notes on Integral Quadratic Con-straints
• User’s guide to µ—toolbox, Matlab
Preview — Example
A linear system of equationsx = y
y = 1.1− 0.1x; x = y = 1
Equations with uncertainty
(x − y)2 < ε 1x2
(y+ 0.1x − 1.1)2 < ε 2; (x − 1)2 + (y− 1)2 < ε 3
Given ε 1 and ε 2, how do we find a valid ε 3?
1

Example
∆
+C(sI − A)−1Bv w r
Question: For what values of ∆ is the system stable?Note: May be large differenses if we consider complex or realuncertainties ∆.
Parametric Uncertainty in Linear Systems
Let D ⊂ Rnn contain zero. The system x = (A + B∆C)x isthen exponentially stable for all ∆ ∈ D if and only if
• A is stable
• det[I − ∆C(iω I − A)−1B
]= 0 for ω ∈ R, ∆ ∈ D
∆
+C(sI − A)−1Bv w r
Use quadratic inequalities at each frequency!
w =[I − ∆C(iω I − A)−1B
]−1r
w= ∆v+ r
v = C(iω I − A)−1Bw
For example, if
D =
[δ1 0
0 δ2
]: δ k ∈ [−1,1]
Then a bound of the form hwh2 < γ 2hrh2 can be obtained using
hw1 − r1h2 < hv1h
2
hw2 − r2h2 < hv2h
2
[v1
v2
]= C(iω I − A)−1B
[w1
w2
]
This verifies that det[I − ∆C(iω I − A)−1B
]= 0.
Structured Singular Values
Given M ∈ Cnn and a perturbation set
D = diag[δ1 Ir1 , . . . ,δm Irm , ∆1, . . . , ∆p] : δ k ∈ R, ∆l ∈ Cmlml
the structured singular value µD (M) is defined by
µD (M ) = supσ (∆)−1 : ∆ ∈ D , det(I − M∆) = 0
See Matlab’s µ − toolbox
2

Reformulated Definition
The following two conditions are equivalent
(i) 0 = det[I − ∆M(iω )] for all ∆ ∈ D and ω ∈ R
(ii) µD (M(iω )) < 1 for ω ∈ R
Bounds on µ
If D consists of full complex matrices, then µD (M) = σ (M).
where σ (M) is the largest singular value of M = the larges eigen-value of the matrix M∗M .
If D consists of perturbations of the form ∆ = δ I with δ ∈[−1,1], then µD (M) is equal to the magnitude ρR(M) of thelargest real eigenvalue of M (“the spectral radius”). In general
ρR(M ) ≤ µD (M ) ≤ σ (M )
Computation of µ
Define
UD = U ∈ D : U ′U = I
DD = D = D′ ∈ Cn : D∆ = ∆D for all ∆ ∈ D
GD = G = G′ ∈ Cn : G∆ = ∆′G for all ∆ ∈ D
Then
supU∈UD
ρR(UM ) ≤ µD (M ) ≤ inf
D ∈ DDG ∈ GD
µ(D,G) ≤ infD∈DD
σ (DMD−1)
where
µ(D,G) = infµ > 0 : M ′D′DM + j(GM − M ′G) < µ2D′D
S-procedure for quadratic inequalities
The inequalityx
y
1
T
M0
x
y
1
≥ 0
follows from the inequalitiesx
y
1
T
M1
x
y
1
≤ 0
x
y
1
T
M2
x
y
1
≤ 0
if there exist τ1,τ2 ≥ 0 such that
M0 + τ1M1 + τ2M2 ≥ 0
Numerical algorithms in available (e.g. in Matlab)
3

S-procedure in general
The inequality
σ 0(h) ≤ 0
follows from the inequalities
σ 1(h) ≥ 0, . . . ,σ n(h) ≥ 0
if there exist τ1, . . . ,τ n ≥ 0 such that
σ 0(h) +∑
k
τ kσ k(h) ≤ 0 ∀h
S-procedure losslessness by Megretsky/Treil
Let σ 0,σ 1, . . . ,σ n be time-invariant quadratic forms on Lm2 .Suppose that there exists f∗ such that
σ 1( f∗) > 0, . . . ,σm( f∗) > 0
Then the following statements are equivalent
• σ 0( f ) ≤ 0 for all f such that σ 1( f ) ≥ 0, . . . ,σ n( f ) ≥ 0
• There exist τ1, . . . ,τ n ≥ 0 such that
σ 0( f ) +∑
k
τ kσ k( f ) ≤ 0 ∀ f
Integral Quadratic Constraint
∆
∆vv
The causal bounded operator ∆ on Lm2 is said to satisfy theIQC defined by the matrix function Π(iω ) if
∫ ∞
−∞
[v(iω)
(∆v)(iω)
]∗
Π(iω)
[v(iω)
(∆v)(iω)
]dω ≥ 0
for all v ∈ L2.
Example — Gain and Passivity
Suppose the gain of ∆ is at most one. Then
0 ≤
∫ ∞
0
(hvh2− h∆vh2)dt =
∫ ∞
−∞
[v(iω)
(∆v)(iω)
]∗ [I 0
0 −I
] [v(iω)
(∆v)(iω)
]dω
Suppose instead that ∆ is passive. Then
0 ≤
∫ ∞
0
v(t)(∆v)(t)dt=∫ ∞
−∞
[v(iω)
(∆v)(iω)
]∗ [0 I
I 0
] [v(iω)
(∆v)(iω)
]dω
4

Exercise
Show that a nonlinearity satisfying the sector condition
α y2 ≤ ϕ(t, y)y ≤ β y2
satisfies the IQC, ϕ ∈ IQC(Π) given by
Π( jω ) = Π =
[−2α β α + βα + β −2
]
Note: Satisfies a quadratic inequality (for every frequency) =;satisfies integral quadratic inequality
IQC’s for Coulomb Friction
f (t) = −1 if v(t) < 0
f (t) ∈ [−1,1] if v(t) = 0
f (t) = 1 if v(t) > 0
Zames/Falb’s property
0 ≤
∫ ∞
0
v(t)[ f (t) + (h ∗ f )(t)]dt,∫ ∞
−∞
hh(t)hdt≤ 1
0 ≤
∫ ∞
−∞
[v
f
]∗ [0 1+ H(−iω)
1+ H(iω) 0
] [v
f
]dω
∆ structure Π(iω) Condition
∆ passive[0 I
I 0
]
i∆(iω)i ≤ 1
[x(iω)I 0
0 −x(iω)I
]x(iω) ≥ 0
δ ∈ [−1,1][X (iω) Y(iω)
Y(iω)∗ −X (iω)
]X = X ∗ ≥ 0
Y = −Y∗
δ (t) ∈ [−1,1][X Y
YT −X
]
(∆v)(t) = sgn(v(t))
[0 1+ H(iω)
1+ H(iω)∗ 0
]iHiL1 ≤ 1
Well-posed Interconnection
G(s)
τ ∆
v
w
f
e
The feedback interconnectionv = Gw+ f
w = ∆(v) + e
is said to well-posed if the map (v,w) =→ (e, f ) has a causalinverse. It is called BIBO stable if the inverse is also bounded.
5

IQC Stability Theorem
G(s)
τ ∆
Let G(s) be stable and proper and let ∆ be causal.
For all τ ∈ [0,1], suppose the loop is well posed and τ ∆satisfies the IQC defined by Π(iω ). If
[G(iω)
I
]∗
Π(iω)
[G(iω)
I
]< 0 for ω ∈ [0, ∞]
then the feedback system is BIBO stable.
Relation to Passivity and Gain Theorems
G(s)
τ ∆
A stability theorem based on gain is recovered with[I 0
0 −I
].
A passivity based stability theorem is recovered with[0 I
I 0
].
Special Case — µ Analysis
Note that ∆ = diagδ1, . . . ,δm, with hδ kh ≤ 1 satisfies the IQCdefined by
Π(iω) =
[X (ω) 0
0 −X (iω)
]
where X (iω ) = diagx1(iω ), . . . , xm(iω ) > 0.
Feedback loop stability follows if there exists X (iω ) > 0 with
G(iω)∗X (iω)G(iω) < X (iω) ω ∈ [0, ∞]
or eqivalently, with D(iω )∗D(iω ) = X (iω )
supω
iD(iω)G(iω)D(iω )−1i < 1
Combination of Uncertain and Nonlinear Blocks
The operator ∆(v1,v2) = (δ v1,φ(v2)) where
δ ∈ [−1,1]α ≤ φ(v2)/v2 ≤ β
satisfies all IQC’s defined by matrix functions of the form
Π(iω) =
X (iω) 0 Y(iω) 0
0 −2α β 0 α + βY(iω)∗ 0 −X (iω) 0
0 α + β 0 −2
where X (iω ) = X (iω )∗ and Y(iω ) = Y(iω )∗.
6

Proof idea of IQC Theorem
Combination of the IQC for ∆ with the inequality for G givesexistence of c0 > 0 such that
ivi ≤ c0iv− τG∆(v)i v ∈ L2 ,τ ∈ [0,1]
If (I − τG∆)−1 is bounded for some τ ∈ [0,1] then the aboveinequality gives boundedness of (I − νG∆)−1 for all ν with
c0iG∆i ⋅ hτ − ν h < 1
Hence, boundedness for τ = 0 gives boundedness forτ < (c0iG∆i)−1. This, in turn, gives boundedness for τ <2(c0iG∆i)−1 and so on. Finally the whole interval [0,1] iscovered.
A toolbox for IQC analysis
Copy /home/kursolin/matlab/lmiinit.m to the currentdirectory or download and install the IQCbeta toolbox fromhttp://www.control.lth.se/∼cykao.
−10s2
s3+2s2+2s+1
e(t) y(t)
−4 −2 0 2 4 6 8
−2
0
2
4
6
8G(iω )
>> abst_init_iqc;
>> G = tf([10 0 0],[1 2 2 1]);
>> e = signal
>> w = signal
>> y = -G*(e+w)
>> w==iqc_monotonic(y)
>> iqc_gain_tbx(e,y)
A simulation model
2s +2s+12
.01s +s2
Transfer FcnSum1Sum
Step
Scope
Saturation
s
1
Integrator1s
1
Integrator
−K−
Gain2
−1
Gain1
10
Gain
An analysis model defined graphically
Exp(−ds)−1
uncertain delay
performance
monotonic with restrict rate
2s +2s+12
0.01s +s+.012
Transfer Fcn
Sum2
Sum1Sum
s
1
Integrator1s
1
Integrator
10
Gain
The text version (i.e., NOT the gui) is strongly recommendedby the IQCbeta author(s) at present version!!
7

z iqc_gui(’fricSYSTEM’)
extracting information from fricSYSTEM ...
scalar inputs: 5
states: 10
simple q-forms: 7
LMI #1 size = 1 states: 0
LMI #2 size = 1 states: 0
LMI #3 size = 1 states: 0
LMI #4 size = 1 states: 0
LMI #5 size = 1 states: 0
Solving with 62 decision variables ...
ans = 4.7139
Text version (i.e., NOT gui) strongly recommended by the IQCbetaauthor(s) at present version!!
A library of analysis objects
1
Out
window
white noiseperformance
unknown const
slope nonlinearity
sector+popov
sectorsat−int
Popov
popov IQC
polytope withrestrict rate
polytope
performance
odd slope nonlinearity
norm bounded
monotonic with restrict rate
harmonic
encapsulated odd deadzone
encapsulated deadzone
diagonal structure
Exp(−ds)−1
cdelay
(s−1)
s(s+1)
Zero−Pole
1
s+1
Transfer Fcn
|D(t)|<k
TV scalar
SumStep Source
x’ = Ax+Bu y = Cx+Du
State−Space
STV scalar
Mux
Mux
K
MatrixGain
LTI unmodeled
1
Gain
Demux
Demux
1
In
Bounds on Auto Correlation
system
u
The auto correlation bound∫ ∞
−∞
u(t)∗u(t− T)dt ≤ α∫ ∞
−∞
u(t)∗u(t)dt,
corresponds to
Ψ(iω) = 2α − eiωT − e−iωT .
Dominant Harmonics
system
u
For small ε > 0, the constraint∫ ∞
0
hu(iω)h2dω ≤ (1+ ε)
∫ b
a
hu(iω)h2dω
means that the energy of u is concentrated to the interval[a, b].
8

Subharmonic Oscillations in Position Control
1s
1sPID
θ
θf
u
r = 1+ 0.1 sinω t−
0 40 80 120
0.8
1
1.2
1.4
No Subharmonics in Velocity Control!
1sPI
r
f
u
θ−
0 10 20 30 400.8
0.9
1
1.1
1.2
Incremental Gain and Passivity
∆
∆vv
A causal nonlinear operator ∆ on Lm2 is said to have incremental gain less than γ if
i∆(v1) − ∆(v2)i ≤ γ iv1− v2i v1, v2 ∈ L2
It is called incrementally passive if
0 ≤
∫ T
0
[∆(v1) − ∆(v2)][v1 − v2]dt T > 0, v1, v2 ∈ L2
Incremental Stability
G(s)
τ ∆
v
w
f
e
The feedback interconnectionv = Gw+ f
w = ∆(v) + e
is called incrementally stable if there is a constant C suchthat any two solutions (e1, f1,v1,w1), (e2, f2,v2,w2) satisfies
iv1− v2i + iw1 − w2i ≤ Cie1 − e2i + Ci f1 − f2i
9

Incremental Stability Excludes Subharmonics
1sPI
r
f
u
− θ
−1 −0.5 0 0.5 1−1
−0.5
0
0.5
1
G( jω )
F(iω ) G(iω )
r
w
θ− G(s) = ss2+Ks+Ki
Summary — Robustness analysis
• µ-analysis
• S-procedure
• Integral Quadratic Constraints
References:
A. Megretski and A. Rantzer, System Analysis via IntegralQuadratic Constraints, IEEE Transactions on Automatic Con-trol, 47:6, 1997
“A formula for Computation of the Real Stability Radius”, L.Qiu, B. Bernhardsson, A. Rantzer, E.J. Davison, and P.M.Young. Automatica, pp. 879–890, vol 31(6), 1995.
U. Jönsson, Lecture Notes on Integral Quadratic Constraints
User’s guide to µ—toolbox, Matlab
10

Lecture 5. Synthesis, Nonlinear design
• Introduction
• Control Lyapunov functions
• Backstepping
Why nonlinear design methods?
• Linear design degraded by nonlinearities (e.g. saturations)
• Linearization not controllable (e.g. pocket parking)
• Long state transitions (e.g. satellite orbits)
Exact (feedback) Linearization
Idea: Transform the nonlinear system into a linear system bymeans of feedback and/or a change of variables. After this, astabilizing state feedback is designed.
Simple examplex =
n
lsin(x) + cos(x)u
Put
u =1
cos(x)(−
n
lsin(x) + v)
givesx = v
Design linear controller v = −l1x + −l2 x, etc
State transformation
More difficult example, needing state transformation
x1 = a sin(x2)
x2 = −x21
+ u
Can not cancel a sin(x2). Introduce
z1 = x1
z2 = a sin x2
so that
z1 = z1
z2 = (−z21 + u)a cos x2
Then feedback linearization is possible by
u = z21
+ v/(a cos(z2))1

Exact Linearization
• Often useful in simple cases
• Important intuition may be lost
• Related to “Lie brackets” and “flatness”
From analysis to synthesis
Lyapunov criterion Search for (V ,u) such that
VV
V x[ f + nu] < 0
IQC criterion Search for Q(s) and τ1, . . . ,τm such that[
[T1 + T2QT3](iω)
I
]∗ [
∑
k
τ kΠk(iω)
] [
[T1 + T2QT3](iω)
I
]
< 0
for ω ∈ [0, ∞]
In both cases, the problem is non-convex and hard.Heuristic idea: Iterate between the arguments
Convexity for state feedback
Problem Suppose α ≤ φ(v)/v≤ β . Given the system
x = fu(x) := Ax + Eφ(Fx) + Bu
find u = −Lx and V (x) = xTPx such that VVVxfu(x) < 0
Solution Solve for P, L
(A+ α EF − BL)TP + P(A+ α EF − BL) < 0
(A+ βEF − BL)TP + P(A + βEF − BL) < 0
or equivalently convex in (Q, K ) = (P−1, LP−1)
(AQ + α EFQ − BK )T + (AQ + α EFQ − BK ) < 0
(AQ + βEFQ − BK )T + (AQ + βEFQ − BK ) < 0
Control Lyapunov Function (CLF)
A positive definite radially unbounded C1 function V is called aCLF for the system x = f (x,u) if for each x = 0, there exists usuch that
VV
V x(x) f (x,u) < 0 (Notation: L f V (x) < 0)
When f (x,u) = f (x) + n(x)u, V is a CLF if and only if
L f V (x) < 0 for all x = 0 such that hLnV (x)h = 0
2

Example
Check if V (x, y) = [x2 + (y+ x2)2]2/2 is a CLF for the system
x = xy
y = −y + u
L f V (x, y) = x2 y+ (y+ x2)(−y+ 2x2 y)
LnV (x, y) = y+ x2
LnV (x, y) = 0 ; y = −x2 ; L f V (x, y) = −x4 < 0 if (x, y) = 0
Sontag’s formula
If V is a CLF for the system x = f (x) + n(x)u, then acontinuous asymptotically stabilizing feedback is defined by
u(x) :=
0 if LnV (x) = 0
−L f V +
√
(L f V )2 + (LnV )4
LnV(x) if LnV (x) = 0
Backstepping idea
Problem
Given a CLF for the system
x = f (x,u)
find one for the extended system
x = f (x, y)y = h(x, y) + u
Idea
Use y to control the first system. Use u for the second.
Note potential for recursivity
Backstepping
Let Vx be a CLF for the system x = f (x) + n(x)u withcorresponding asymptotically stabilizing control law u = φ(x).Then V (x, y) = Vx(x) + [y− φ(x)]2/2 is a CLF for the system’
x = f (x) + n(x)y
y = h(x, y) + u
with corresponding control law
u =VφV x
[ f (x) + n(x)u] −VVxV x
n(x) − h(x, y) + φ(x) − y
Proof.
V = (VVx/V x)( f + nu) + (y− φ)[(Vφ/V x) f + h+ u]
= (VVx/V x)( f + nφ) + (y− φ)[(VVx/V x)n + (Vφ/V x) f + h+ u]
= (VVx/V x)( f + nφ) − (y− φ)2 < 0
3

Backstepping Example
For the system
x = x2 + y
y = u
we can choose Vx(x) = x2 and φ(x) = −x2 − x to get thecontrol law
u = φ ′(x) f (x, y) − h(x, y) + φ(x) − y
= −(2x + 1)(x2 + y) − x2 − x − y
with Lyapunov function
V (x, y) = Vx(x) + [y − φ(x)]2/2
= x2 + (y+ x2 + x)2/2
4

Nonlinear Control
Intro to geometric control theory
• Lie-brackets and nonlinear controllability
• The parking problem
Khalil pp. Ch 13.1–2 (Intro to Feedback linearization)
Slotine and Li, pp. 229-236
Controllability
Linear casex = Ax + Bu
All controllability definitions coincide
0→ x(T),x(0) → 0,x(0) → x(T)
T either fixed or free
Rank condition System is controllable iff
Wn =
B AB . . . An−1B
full rank
Is there a corresponding result for nonlinear systems?
Lie Brackets
Lie bracket between f (x) and n(x) is defined by
[ f , n] = VnVx f − V f
Vx n
Example:
f =
cos x2
x1
, n =
x1
1
,
[ f , n] = VnV x f − V f
V x n
=
1 0
0 0
cos x2
x1
−
0 − sin x21 0
x1
1
=
cos x2 + sin x2−x1
Why interesting?
x = n1(x)u1 + n2(x)u2
• The motion (u1,u2) =
(1,0), t ∈ [0, ε ](0,1), t ∈ [ε ,2ε ]
(−1,0), t ∈ [2ε ,3ε ](0, −1), t ∈ [3ε ,4ε ]
gives motion x(4ε ) = x(0) + ε 2[n1, n2] + O(ε 3)
• Φ t[n1,n2] = limn→∞
(Φ√
tn
−n2 Φ√
tn
−n1 Φ√
tn
n2 Φ√
tn
n1 )n
• The system is controllable if the Lie bracket tree has fullrank (controllable=the states you can reach from x = 0 at fixed time T contains a ball around x = 0)
1

The Lie Bracket Tree
[n1, n2]
[n1, [n1, n2]][n2, [n1, n2]]
[n1, [n1, [n1 , n2]]] [n2, [n1, [n1 , n2]]] [n1, [n2, [n1 , n2]]] [n2, [n2, [n1 , n2]]]
Parking Your Car Using Lie-Brackets
ϕ
θ
x
y
(x, y)
d
dt
x
y
ϕθ
=
0
0
0
1
u1 +
cos(ϕ + θ )sin(ϕ + θ )sin(θ )0
u2
Parking the Car
Can the car be moved sideways?
Sideways: in the (− sin(ϕ), cos(ϕ),0,0)T -direction?
[n1, n2] = Vn2V x n1 − Vn1
V x n2
=
0 0 − sin(ϕ + θ ) − sin(ϕ + θ )0 0 cos(ϕ + θ ) cos(ϕ + θ )0 0 0 cos(θ )0 0 0 0
0
0
0
1
− 0
=
− sin(ϕ + θ )cos(ϕ + θ )cos(θ )0
=: n3 = “wriggle”
Once More
[n3, n2] = Vn2V x n3 − Vn3
V x n2 = . . .
=
− sin(ϕ)cos(ϕ)0
0
= “sideways”
The motion [n3, n2] takes the car sideways.
(−sin(ϕ), cos(ϕ))
2

The Parking Theorem
You can get out of any parking lot that is bigger than your car.Use the following control sequence:
Wriggle, Drive, –Wriggle(this requires a cool head), –Drive(repeat).
Another example — The unicycle
(x1, x2)x3
n1 =
cos(x3)sin(x3)0
, n2 =
0
0
1
, [n1, n2] =
sin(x3)− cos(x3)0
Full rank, controllable.
More Information
More theory about Lie-bracket theory
• Nijmeijer, van der Schaft, Nonlinear Dynamical ControlSystems, Springer Verlag.
• Isidori, Nonlinear Control Systems, Springer Verlag
3

More activities on passivityor
“Recapitulation of some stuff from Spring 2003”
• Interconnected systems — peaking
• Passivity and Stability
• Relative degree and zero dynamics
• Exact linearization
Nonlinear Systems, Khalil
Constructive Nonlinear Control, Sepulchre et al
Consider the system
x1 = x2x2 = uy = c1x1 + c2x2
z = −z+ z2 ⋅ y
We can solve for z(t)
z(t) = e−tz(0)1− z(0)
∫ t
0e−τ y(τ )dτ
When can we guarantee that
1− z(0)∫ t
0
e−τ y(τ ) = 0?
The peaking phenomenon
Example: Controlled linear system with right-half plane zero
Feedback can change location of poles but not location of zero(unstable pole-zero cancellation not allowed).
Gcl(s) = (−s+ 1)ω2os2 + 2ω os+ ω2o
(1)
A step response will reveal a transient which grows in ampli-tude for faster closed loop poles s = −ω o, see Figure on nextslide.
The peaking phenomenon – cont.
0 1 2 3 4 5 6−2
−1.5
−1
−0.5
0
0.5
1
ω o = 1ω o = 2ω o = 5
Step responses for the system in Eq. (1), ω o = 1,2, and 5.Faster poles gives shorter settling times, but the transients
grow significantly in amplitude, so called peaking.
1

Dissipativity
Consider a nonlinear system
x(t) = f (x(t),u(t), t), t ≥ 0y(t) = h(x(t),u(t), t)
The system is dissipative if there exist
• a storage function S(x) ≥ 0• a supply rate r(t) = r(u(t), y(t), t)
such that
S(x(T)) − S(x(0)) ≤∫ T
0
r(u(t), y(t))dt
S(x) ≤ r(u, y)
If the supply rate is
r(u(t), y(t)) = uT y
then the system is passive.
S(x) ≤ r(u, y)
“increase rate for storage not larger than supplied power”
Any storage increase in a passive systems is due to externalsources!
Connection between passivity and Lyapunov stability (Warning:passivity is an In/Out-relationship so need something more).
Local passivity
Show that
x = (x3 − kx) + uy = x
is passive in the interval X = [−√k,
√k].
Use S(x) = x2/2 as storage function.
S = x2(x2 − k) + ux ≤ uy
for all x ∈ X
2

Example: Mass-spring-damper system
position x, velocity v (constants k, d, m > 0)x = v
v = − kmx − dmv− 1mx
Energy E = 12mv2 + 1
2kx2
Show that the mapping
• input force u→ velocity v is passive
• input force u→ position x is NOT passive
u→ vE = uv− dv2 ≤ uv
so passive
u→ x
Gxu(s) = 1
ms2 + ds+ khas relative degree 2 > 1.
Assume that Σ1 and Σ2 are passive, then the well-posed feed-back interconnections in the figure below are also passive fromr to y.
r u+−
Σ1
Σ2
y
r
Σ1
Σ2
+y
“Small phase-property” for feedback-connection
Excess and shortage of passivity
A system is said to be
• Output Feedback Passive (OFP) if it is dissipative withrespect to r(u, y) = uT y− kyT y for some k
• Input Feedback Passive (IFP) if it is dissipative withrespect to r(u, y) = uT y− kuTu for some k
Excess or shortage of passivity can be quantified by thenotation OFP(k) and I FP(k)
3

Excess of passivity vs Shortage of passivity
IFP(1) OFP(-0.3)
x = u x = 0.3x + uy = x + u y = x
Note! u = −ky where k = 0.3 is exactly the amount offeedback required to make the (right) system passive.
Feedback connection may “even out” excess and shortage ofpassivity...
Sector condition [α , β ]:
αu2 ≤ uϕ(u) ≤ βu2, 0 ≤ α ≤ β
Take S=0
uy− αu2 ≥ 0 and uy− 1βy2 ≥ 0
The sector nonlinearity y = ϕ(u) is both IFP(α )and OFP(1/β ).
Special Case: Positivity
Let M( jω ) = C( jω I − A)−1B + D, where A is Hurwitz. Thesystem
x = Ax + Bu, t ≥ 0y = Cx + Duu = −ψ (t, y)
with sector condition
ψ (t, y)/y ≥ 0 ∀t ≥ 0, y = 0
is absolutely stable if
M ( jω) +M ( jω)∗ > 0, ∀ω ∈ [0, ∞)
Note: For SISO systems this means that the Nyquist curve liesstrictly in the right half plane.
Zero-state detectability (ZSD)
Remark: a storage functions may be positive semidefinite
x1 = x1x2 = uy = x2
The system above is passive with storage function S = x22/2 !!
(although x1 is unstable).
Introduce zero-state detectability (cmp linear detectability) toexclude these cases and relate to stability.
4

Zero-state detectability (ZSD) cont.
DEFINITION 1—ZERO-STATE DETECTABILITY
The system of x = f (x,u), y = h(x,u) is said to be ZeroState Detectable if, for any initial condition x(0) and zero inputu = [u1 . . . up]T 0, the condition of identical zero outputy = [h1(x) . . . hp(x)] = 0, t ≥ 0 implies that the state convergesto zero, limt→+∞ x(t) → 0.
Passivity and stability
• Dissipativity and zero-state detectability of a system implyLyapunov stability.
• For a system H which is passive and ZSD:
If the output y = h(x) (i. e., no direct throughput) thenthe feedback u = −y achieves asymptotic stability ofx = 0.
Relative degree
“ A system’s relative degree: How many times you need to takethe derivative of the output signal before the input shows up”
For a nonlinear system with relative degree d
x = f (x) + n(x)uy = h(x) (2)
we have
y = d
dth(x) = Vh(x)
V x x = VhV x f (x) + Vh
V x n(x)u= L f h(x) + Lnh(x)
︸ ︷︷ ︸
=0 i f d>1
u
...
y(k) = Lkf h(x) if k < d (3)...
y(d) = Ldf h(x) + LnL(d−1)f h(x)u
5

Using the same kind of coordinate transformations as for thefeedback linearizable systems above, we can introduce newstate space variables, ξ , where the first d coordinates arechosen as
ξ1 = h(x)ξ2 = L f h(x)...
ξd = L(d−1)f h(x)
(4)
Under some conditions on involutivity, the Frobenius theoremguarantees the existence of another (n−d) functions to providea local state transformation of full rank. Such a coordinatechange transforms the system to the normal form
ξ1 = ξ2...
ξd−1 = ξdξd = Ldf h(ξ , z) + LnL
d−1f h(ξ , z)u
z = ψ (ξ , z)y = ξ1
(5)
where z = ψ (ξ , z) represent the zero dynamics of order n − d[Byrnes+Isidori 1991].
EXAMPLE 1—ZERO DYNAMICS FOR LINEAR SYSTEMS
Consider the linear system
y = s− 1s2 + 2s+ 1u (6)
with the following state-space description
x1 = −2x1 + x2 +ux2 = −x1 −uy = x1
(7)
We have the relative degree =1
Find the zero-dynamics, by assigning y 0.
y 0; x1 0 ; x1 0 ; x2 + u = 0
; x2 = −u = x2(8)
The remaining dynamics is an unstable system correspondingto the zero s = 1 in the transfer function (6).
6

Exact (feedback) Linearization
Idea: Transform the nonlinear system into a linear system bymeans of feedback and/or a change of variables. After this, astabilizing state feedback is designed.
+
r v u yΣu = β −1(⋅)
−Lx
z
x = T(z)
Inner feedback linearization and outer linear feedback control
For general nonlinear systems feedback linearization com-prises
• state transformation
• inversion of nonlinearities
• linear feedback
Simple examplex = n
lsin(x) + cos(x)u
Put
u = 1
cos(x) (−nlsin(x) + v)
givesx = v
Design linear controller v = −l1x + −l2 x, etc
State transformation
More difficult example, where we need a state transformation
x1 = a sin(x2)x2 = −x2
1+ u
Can not cancel a sin(x2). Introduce
z1 = x1z2 = a sin x2
so that
z1 = z1z2 = (−z21+ u)a cos x2
Then feedback linearization is possible by
u = z21
+ v/(a cos(z2))
Feedback linearization (“nonlinear version of pole-zero cancel-lation”)
Feedback linearization can be interpreted as a nonlinearversion of pole-zero cancellations which can not be used ifthe zero-dynamics are unstable, i. e., for nonminimum-phasesystem.
7

When to cancel nonlinearities?
x1 = −x31 + u1
x2 = x32 + u2(9)
Nonrobust and/or not necessary.
However, note the difference between tracking or regulation!!
Will see later how “optimal criteria” will give hints.
“Matching” uncertainties
x1 = x2...
xn−1 = xdxn = Ldf h(x, z) + LnL
d−1f h(x, z)u
z = ψ (x, z)y = x1
(10)
Integrator chain and nonlinearities (+ zero-dynamics)
Note that uncertainties due to parameters etc. are“collected in”
Ldf h(x, z) + LnLd−1f h(x, z)u
Achieving passivity by feedback ( Feedback passivation )
Need to have
• relative degree one
• weakly minimum phase
NOTE! (Nonlinear) relative degree and zero-dynamics invariant under feedback!
Two major challenges:
• avoid non-robust cancellations
• make it constructive by finding matching input-output pairs
Exact Linearization
• Often useful in simple cases
• Important intuition may be lost
• Related to “Lie brackets” and “flatness”
8

Control Lyapunov Function (CLF)
A positive definite radially unbounded C1 function V is called aCLF for the system x = f (x,u) if for each x = 0, there exists usuch that
VVV x (x) f (x,u) < 0 (Notation: L f V (x) < 0)
When f (x,u) = f (x) + n(x)u, V is a CLF if and only if
L f V (x) < 0 for all x = 0 such that hLnV (x)h = 0
Example
Check if V (x, y) = [x2 + (y+ x2)2]2/2 is a CLF for the system
x = xyy = −y+ u
L f V (x, y) = x2 y + (y+ x2)(−y+ 2x2 y)LnV (x, y) = y+ x2
LnV (x, y) = 0 ; y = −x2 ; L f V (x, y) = −x4 < 0 if (x, y) = 0
Sontag’s formula
If V is a CLF for the system x = f (x) + n(x)u, then acontinuous asymptotically stabilizing feedback is defined by
u(x) :=
0 if LnV (x) = 0
−L f V +√
(L f V )2 + ((LnV )(LnV )T)2(LnV )(LnV )T [LnV ]T if LnV (x) = 0
Note: Can cancel factor LnV = 0 if scalar.
Backstepping idea
Problem
Given a CLF for the system
x = f (x,u)
find one for the extended system
x = f (x, y)y = h(x, y) + u
Idea
Use y to control the first system. Use u for the second.
Note potential for recursivity
9

Backstepping
Let Vx be a CLF for the system x = f (x) + n(x)u withcorresponding asymptotically stabilizing control law u = φ(x).Then V (x, y) = Vx(x) + [y− φ(x)]2/2 is a CLF for the system’
x = f (x) + n(x)yy = h(x, y) + u
with corresponding control law
u = VφV x [ f (x) + n(x)u] − VVx
V x n(x) − h(x, y) + φ(x) − y
Proof.
V = (VVx/V x)( f + nu) + (y− φ)[(Vφ/V x) f + h+ u]= (VVx/V x)( f + nφ) + (y− φ)[(VVx/V x)n + (Vφ/V x) f + h+ u]= (VVx/V x)( f + nφ) − (y− φ)2 < 0
Backstepping Example
For the system
x = x2 + yy = u
we can choose Vx(x) = x2 and φ(x) = −x2 − x to get thecontrol law
u = φ ′(x) f (x, y) − h(x, y) + φ(x) − y= −(2x+ 1)(x2 + y) − x2 − x − y
with Lyapunov function
V (x, y) = Vx(x) + [y − φ(x)]2/2= x2 + (y+ x2 + x)2/2
10

Nonlinear design methods
• Lyapunov redesign
• Nonlinear damping
• Backstepping
– CLF– passivity– roboust/adaptive
Ch 14 Nonlinear Systems, Khalil
The Joy of Feedback, P V Kokotovic
motivation: Feedback Linearization
One of the drawbacks with feedback linearization is that exactcancellation of nonlinear terms may not be possible due toe. g., parameter uncertainties.
A suggested solution:
• stabilization via feedback linearization around a nominalmodel
• consider known bounds on the uncertainties to provide anadditional term for stabilization ( Lyapunov redesign )
Lyapunov Redesign
Consider the nominal system
x = f (x, t) + G(x, t)u
with the known control law
u = ψ (x, t)
so that the system is uniformly asymptotically stable.
Assume that a Lyapunov function V (x, t) is known s.t.
α 1(hhxhh) ≤ V (x, t) ≤ α 2(hhxhh)VV
V t+
VV
V x[ f (t, x) + Gψ ] ≤ −α 3(hhxhh)
Lyapunov Redesign — cont.
Perturbed system
x = f (x, t) + G(x, t)[u + δ ] (1)
disturbance δ = δ (t, x,u) Assume the disturbance satisfies the
boundhhδ (t, x,ψ + v)hh ≤ ρ(x, t) + κ0hhvhh
If we know ρ and κ0 how do we design additional control vsuch that u = ψ (x, t) + v stabilizes (2)?
The matching condition: perturbation enters at same place ascontrol signal u.
1

Apply u = ψ (x, t) + v
x = f (x, t) + G(x, t)ψ + G(x, t)[v+ δ (t, x,ψ + v)] (2)
V =VV
V t+
VV
V x[ f (t, x) + Gψ ] +
VV
V xG[v+ δ ] ≤ − α 3(hhxhh) +
VV
V xG[v+ δ ]
Introduce w = [VVVxG]
V ≤ −α 3(hhxhh) +wTv+ wTδ
Choose v such that wTv+ wTδ ≤ 0:
Two alternatives presented in Khalil (hh ⋅ hh2-norm / hh ⋅ hh∞-norm)
Note: v appears at same place as δ due to the matchingcondition
Lyapunov Redesign — cont.
wTv+ wTδ ≤ wTv+ hhwThh2hhδ hh2
wTv+wTδ ≤ wTv+ hhwThh1hhδ hh∞
Alternative 1:
Ifhhδ (t, x,ψ + v)hh2 ≤ ρ(x, t) + κ0hhvhh2, 0 ≤ κ0 < 1
takev = −η(t, x)
w
hhwhh2where η ≥ ρ/(1− κ0)
Alternative 2:
Ifhhδ (t, x,ψ + v)hh∞ ≤ ρ(x, t) + κ0hhvhh∞, 0 ≤ κ0 < 1
takev = −η(t, x) sgnw
where η ≥ ρ/(1− κ0)
Restriction on κ0 < 1 but not on growth of ρ.Alt 1 and alt 2 coincide for single-input systems.
Note: control laws are discontinues fcn of x (risk of chattering)
Example: Matched uncertainty
u+
x
∆
∫
ϕ(⋅)
x = u+ ϕ(x)∆(t)
2

Example cont.
Example:
Exponentially decaying disturbance ∆(t) = ∆(0)e−kt
linear feedback u = −cx
ϕ(x) = x2
x = −cx + ∆(0)e−ktx2
Similar to peaking problem last lecture: Finite escape ofsolution to infinity if ∆(0)x(0) > c+ k
We want to guarantee that x(t) stay bounded for all initial val-ues x(0) and all bounded disturbances ∆(t)
Nonlinear damping
Modify the control law in the previous example as:
u = −cx − s(x)x
where−s(x)x
will be denoted nonlinear damping.
Use the Lyapunov function candidate V =x2
2
V = xu + xϕ(x)∆
= −cx2 − x2s(x) + xϕ(x)∆
How to proceed?
Chooses(x) = κϕ 2(x)
to complete the squares!
V = −cx2 − x2s(x) + xϕ(x)∆
= −cx2 − κ[
xϕ −∆2κ
]2
+∆2
4κ ≤ −cx2+∆2
4κ
Note! V is negative whenever
hx(t)h ≥∆2κ c
Can show that x(t) converges to the set
R =
x : hx(t)h ≤∆2κ c
i. e., x(t) stays bounded for all bounded disturbances ∆
Remark: The nonlinear damping −κ xϕ 2(x) renders the systemInput-To-State Stable (ISS) with respect to the disturbance.
3

Young’s inequality
Let p> 1, q > 1 s.t. (p− 1)(q− 1) = 1,then for all ε > 0 and all (x, y) ∈ hR2
xy <ε p
phxhp +
1
qε qhyhq
Standard case: (p= q = 2, ε 2/2 = κ )
xy < κ hxh2 +1
4κhyh2
Our example:
xϕ(x)∆(t) < κ x2ϕ 2(x) +∆2(t)4κ
Backstepping idea
Problem
Given a CLF for the system
x = f (x,u)
find one for the extended system
x = f (x, y)y = h(x, y) + u
Idea
Use y to control the first system. Use u for the second.
Note: potential for recursivity
Backstepping
Let Vx be a CLF for the system x = f (x) + n(x)u withcorresponding asymptotically stabilizing control law u = φ(x).Then V (x, y) = Vx(x) + [y− φ(x)]2/2 is a CLF for the system’
x = f (x) + n(x)y
y = h(x, y) + u
with corresponding control law
u =VφV x
[ f (x) + n(x)u] −VVxV x
n(x) − h(x, y) + φ(x) − y
Proof.
V = (VVx/V x)( f + nu) + (y− φ)[(Vφ/V x) f + h+ u]
= (VVx/V x)( f + nφ) + (y− φ)[(VVx/V x)n + (Vφ/V x) f + h+ u]
= (VVx/V x)( f + nφ) − (y− φ)2 < 0
Backstepping Example
For the system
x = x2 + y
y = u
we can choose Vx(x) = x2 and φ(x) = −x2 − x to get thecontrol law
u = φ ′(x) f (x, y) − h(x, y) + φ(x) − y
= −(2x+ 1)(x2 + y) − x2 − x − y
with Lyapunov function
V (x, y) = Vx(x) + [y − φ(x)]2/2
= x2 + (y+ x2 + x)2/2
4

Example again (step by step)
x1 = x12 + x2
x2 = u(x)(3)
Find u(x) which stabilizes (3).
Idea : Try first to stabilize the x1-system with x2 and then stabi-lize the whole system with u.
We know that if x2 = −x1 − x21then x1 → 0 asymptotically ( exponentially )as t→ ∞.
We can’t expect to realize x2 = α (x1) exactly, but we canalways try to getthe error → 0.
Introduce the error states
z1 = x1
z2 = x2 − α 1(x1)(4)
where α 1(x1) = −x1 − x21
; z1 = x1 = z21 +
x2︷ ︸︸ ︷
z2 + α 1(z1) =
= z21 + z2 − z21 − z1 = −z1+ z2
z2 = x2 − α 1 = u(x) −
known︷︸︸︷
α 1
α 1 =d
dt(−z21− z1) = −z1z1 − z1
= −z1(−z1+ z2) − (−z1+ z2) =
= z21 − z1z2 − z2 − z1
Start with a Lyapunov for the first subsystem (z1-dynamics):
V1 =1
2z21 ≥ 0
V1 = z1z1 = −z21 + z1z2
Note :
If z2 = 0 we would achieve V1 = −z21 ≤ 0with α 1(x1)
Now look at the augmented Lyapunov fcn for the error system
V2 = V1 +1
2z22 ≥ 0
V2 = V1 + z2z2 =
= −z21 + z1z2+ z2(u− z21 + z1z2)
= −z21 + z2 (u− z21+ z1z2 + z2 + z1)︸ ︷︷ ︸
choose = −z2
= −z21 − z22 ≤ 0
so if u = z21 − z1z2 − z2 − z1; (z1, z2) → 0 asymptotically (exponentially)
; (x1, x2) → 0 asymptotically
As z1 = x1 and z2 = x2 − α 1 = x2 + x21 + x1 ,we can express u as a ( nonlinear ) state feedback function ofx1 and x2.
5

Backward propagation of desired control signal
u+
x1
x2∫∫
f (⋅)
If we could use x2 as control signal, we would like to assign itto α (x1) to stabilize the x1-dynamics.
u+ +
x2
f + α−α
x1∫ ∫
Move the control “backwards” through the integrator
u+ +
f + α−dα/dt
x1
z2= x2 − α∫ ∫
Note the change of coordinates!
Adaptive Backstepping
System :
x1 = x2 + θγ (x1)
x2 = x3
x3 = u(t)
(5)
where γ is a known function of x1 andθ is an unknown parameter
Introduce new (error) coordinates
z1(t) = x1(t)
z2(t) = x2(t) − α 1(z1, θ)(6)
where α 1 is used as a control to stabilize the z1- system w.r.ta certain Lyapunov-function.
Lyapunov function : V1 = 12z12 + 1
2θ2
where θ = (θ − θ) is the parameter error
(Back-) Step 1:
z1(t) =
x2︷ ︸︸ ︷
z2(t) + α 1(z1, θ ) +θγ (z1(t))
V1 = z1 z1+ θ ˙θ = z1(z2+ α 1 + θγ ) + θ ˙θ =
= z1[ z2+ α 1 + θγ︸ ︷︷ ︸
−z1
] + θ (˙θ − z1γ
︸︷︷︸
τ1
)
Choose α 1 = −z1 − θγ
; V1 = −z21 + z1z2 + θ (˙θ − τ1)
6

Note: If we used ˙θ = τ1 as update lawand if z2 = 0 then V1 = −z21 ≤ 0
Step 2: Introduce z3 = x3 − α 2(z1, z2, θ ) anduse α 2 as control to stabilize the (z1, z2)-system
Augmented Lyapunov function :
V2 = V1 +1
2z22
z2 = x2 − α 1 =
=
x3︷ ︸︸ ︷
z3 + α 2−Vα 1V z1
(x2 + θγ ) −Vα 1Vθ˙θ
V2 = V1 + z2z2 = . . . =
= −z21 + z2[ z3+ α 2 + z1 +Vα 1V z1
(z1− z2) −Vα 1Vθ˙θ
︸ ︷︷ ︸
−z2
] +
+ θ [ ˙θ − (τ1 + z2Vα 1V z1
γ )
︸ ︷︷ ︸
τ2
]
Choose α 2 = −z2 − z1 − Vα 1V z1
(z1 − z2) + Vα 1Vθ
7τ2
Note : If z3 = 0 and we used˙θ = τ2 as update law we would
get V2 = −z21 − z22 ≤ 0
Resulting subsystem
[z1
z2
]
=[
−1 1
−1 −1
]
︸ ︷︷ ︸
Hurwitz
[z1
z2
]
+
[−γ
Vα 1V z1
γ
]
θ +
[0
z3 − Vα 1Vθ (˙θ − τ2)
]
τ2 = [ γ −Vα 1Vx1
γ ]
[z1
z2
]
V2 = −z21 − z22 + z3z2 + θ(˙θ − τ2) − z2
Vα 1Vθ (˙θ − τ2)
Step 3 :
z3 = x3 − α 2
= u−Vα 2V z1z1−
Vα 2V z2z2 −
Vα 2Vθ˙θ = . . . =
= puh...
We now want to choose u = u(z1, z2, θ ) such that the wholesystem will be stabilized w.r.t V3
Just to simplify the expressions, introduce u, and choose
u = −z2 − z3 +Vα 2V z1
(z2+ α 2 + θγ ) +Vα 2V z2x3 +
Vα 2Vθ˙θ + u
u = ?
7

Augmented Lyapunov function :
V3 = V2 +1
2z32 =1
2i z i2 +
1
2θ 2
V3 = −z21− z22− z23+ z3u+ θ [˙θ − (τ2 − z3
Vα 2V z1
γ︸ ︷︷ ︸
τ3
)]
− z2Vα 1Vθ
( ˙θ − τ2)
;˙θ = (τ3) = τ2 − z3
Vα 2V z1
γ
We are almost there :
z=
[−1 1 0
−1 −1 1
0 −1 −1
]
z+
−γVα 1V z1
γVα 2V z1
γ
θ +
[0
Vα 1Vθ (τ2 −
˙θ )
u
]
˙θ = [ γ −Vα 1V z1
γ −Vα 2V z1
γ ]
[z1
z2
z3
]
V3 = −i z i2 + z3u+ z2Vα 1Vθ (τ2 −
˙θ)
Crucial :Vα 1Vθ
(τ2 −˙θ) = z3
Vα 1Vθ
Vα 2V z1
γ︸ ︷︷ ︸
knowndef=σ
z=
[ −1 1 0
−1 −1 1+ σ0 −1 −1
]
z+
[0
0
u
]
+
−γVα 1V z1
γVα 2V z1
γ
θ
V3 = −i z i2 + z3(u+ z2σ )
Choose u = −z2σ
Finally :
V3 = −i z i2 ; GS of z = 0, θ = θ and x → 0 ( by La Salle’sTheorem )
Closedloop system :
z=
−1 1 0
−1 −1 1+ σ0 −1− σ −1
︸ ︷︷ ︸
skew−symmetric − I
z+
−γVα 1V z1
γVα 2V z1
γ
θ
−τ3 = [ γ −Vα 1V z1
γ −Vα 2V z1
γ ] z
Observer backstepping
Observer backstepping is based on the following steps:
1. A (nonlinear) observer is designed which provides (expo-nentially) convergent estimates.
2. Backstepping is applied to a system where the states havebeen replaces by their estimates.
The observation errors are regarded as (bounded) distur-bances and handled by nonlinear damping.
8

Backstepping applies to systems in strictfeedback form
x1 = f1(x1) + x2
x2 = f2(x1, x2) + x3
...
xn = fn(x1, x2, . . . xn−1, xn) + u
Compare with
Strict-feedforward systems
x1 = x2 + f1(x2, x3 , . . . , xn,u)
x2 = x3 + f2(x3, . . . , xn,u)
...
xn−1 = xn + fn−1(xn,u)
xn = u
9

Nonlinear Control
Lecture 8
• Optimal and inverse(!) optimal design
• Saturated control and feedforwarding
Outline
• HJB
• Inverse optimal control
• Stabilization with Saturations
• Integrator forwarding
• Relations between the concepts
• Conclusions
OptimalityTwo main alternatives
• Pontryagin’s Maximum Principle (Necessary cond)
• Hamilton-Jacobi-Bellman (Dyn prog.) (Sufficient cond)
Consider the system
x = f (x) + n(x)u
Find u = u∗ such that
(i) u achieves asymptotic stability of the origin x = 0(ii) u minimizes the cost functional
V =∫ ∞
0
(l(x) + uTR(x)u)dt (1)
where l(x) ≥ 0 and R(x) ≥ 0∀x.For a given feedback u(x) the value of V depends on the initialstate x(0): V (x(0)) or simply V (x).
1

Theorem (Optimality and Stability)
Suppose there exist a C 1-function V (x) ≥ 0 which satisfies theHamilton-Jacobi-Bellman equation
l(x) + L f V (x) − 14LnV (x)R−1(LnV (x))T = 0
V (0) = 0(2)
such that the feedback control
u∗(x) = −12R−1(LnV (x))T
achieves asymptotic stability of the origin x = 0.
Then u∗(x) is the optimal stabilizing control which minimizesthe cost (1).
Example:Linear system
x = Ax + BuCost Function
V =∫ ∞
0
(xTCTCx + uTRu)dt, R > 0
Riccati-equation
PA+ APT − PBR−1BTP + CTC = 0 (3)
If (A,B) controllable and (A,C) observable, then (3) has aunique solution P = PT > 0 such that the optimal cost isV = xTPx and
u∗(x) = −R−1BTPx
is the optimal stabilizing control
5-min exercise:
Consider the systemx = x2 + u
and the cost functional
V =∫ ∞
0
(x2 + u2)dt
What is the optimal stabilizing control?
2

HJB:
x2 + VVVx x
2 − 14
(VVVx
)2
= 0, V (x) = 0
VVV x = 2x2 ±
√
4x4 + 4x2
= 2x2+2x√
x2 + 1(4)
V (x) = 23x3 + 2
3(x2 + 1)3/2+ C, C = −2/3 so that V (0) = 0 (5)
u∗(x) = −12
VVVx = −x2 − x
√x2 + 1
Remark: We have chosen the positive solution in (4) asV (x) ≥ 0
Remark: If (A,B) stabilizable and (A,C) detectable then P ispositive semi-definite.Example (non-detectability in cost)
System
x = x + u
Cost functional
V =∫ ∞
0
u2dt
Riccati-eq2P− P2 = 0, P = 0 or P = 2
Corresponding HJB
xVVV x − 1
4(VV
V x )2 = 0, V (0) = 0
V = 0 or V = 2x2
Inverse optimality
A stabilizing control law u(x) solves an inverse optimal problemfor the system
x = f (x) + n(x)uif it can be written as
u(x) = −k(x)/2 = −12R−1(x)(LnV (x))T , R(x) > 0
where V (x) ≥ 0 and
V = L f V + LnV = L f V − 12LnVk(x)
︸ ︷︷ ︸
−l(x)
≤ 0
Then V (x) is the solution of the HJB-eqn
l(x) + L f V − 14
(LnV )R−1(LnV )T = 0
The underlying idea of formulating an inverse optimal problemis to get some help to avoid non-robust cancellations and gainsome stability margins.
Example: Non-robust cancellationConsider the system
x = x2 + u
and the control law
un = −x2 − x ; x = −x
However, if there is some small perturbation gain u = (1+ε )un,we get
x = −(1+ ε)x − ε x2
This system may has finite escape time solutions.
How does u∗ from previous example behave? 3

Damping Control / Jurdjevic-Quinn
Consider the system
x = f (x) + n(x)u
Assume that the drift part of the system is stable, i.e.,
x = f (x), f (0) = 0
and that we know a function V (x) such that L f V ≤ 0 for all x.
How to make it asymptotically stable (robustly)?
To add more damping to the system to render it asymptoticallystable the following suggestion was made by Jurdjevic-Quinn(1978)
V = L f V + LnVu ≤ LnVu
Chooseu = −κ ⋅ (LnV )T
It also solves the global optimization problem for the costfunctional
V (x) =∫ ∞
0
(l(x) + 2κ uTu)dt
for the state cost function
l(x) = −L f V + κ2
(LnV )(LnV )T ≥ 0
Connection to passivity:
The system
x = f (x) + n(x)uy = (LnV )T(x)
is passive with V (x) as storage function if L f V ≤ 0 as
V = L f V + Lnu ≤ yTu
The feedback law u = −κ y guarantees GAS if the system isZSD (zero state detectable).
Note: May be a conservative choice as it does not fully exploitthe possibility to choose V (x) for the whole system (onlyx = f (x)).
Systems with saturations of control signal
Problem: System runs in “open loop” when in saturation
• Anti-windup designs from FRT075
• Consider Lyapunov function candidates of type V =lon(1+ x2) (see Lecture 1)
• Saturated controls [Sussmann, Yang And Sontag]
• Cascaded saturations [Teel et al]
4

Feedforward systems
Particular form of cascaded systems
1991 A. Teel
... Sussman, Sontag, Yang
... Saberi, Lin
————————————
1996 Mazenc, Praly
1996 Sepulchre, Jankovic, Kokotovic
Strict-feedforward systems
x1 = x2 + f1(x2, x3, . . . , xn,u)x2 = x3 + f2(x3, . . . , xn,u)
...
xn−1 = xn + fn−1(xn,u)xn = u
+ + + 1/s1/s 1/s
fn−1 fn−2 f1
Compare with e.g.Strict-feedback systems
x1 = x2 + f1(x1)x2 = x3 + f2(x1, x2)
...
xn = xn + fn(x1, x2 , . . . xn−1) + u
Strict-feedforward systems are, in general, not feedback lin-earizable!
(i.e neither exact linearization nor backstepping is applicablefor stabilization)
Restriction: Does not cover systems of the type
. . .
xk = −x2k + .... . .
i.e. don’t have to worry about
finite escapetime
5

Sussman and Yang (1991) :
There does not exist any (simple) saturated feedback-lawwhich stabilizes an integrator chain of order ≥ 3 globally.
1/s 1/s 1/s
+++
−l1 −l2 −l3
Teel’s idea:using nested saturations
u = −σ n(hn(x) + σ n−1(hn−1(x) + ⋅ ⋅ ⋅ + σ 1(h1(x)) . . . )
Definition: σ is a linear saturation for (L,M) if
• σ is continuous and nondecreasing
• σ (s) = s when hsh ≤ L• hσ (s)h ≤ M , ∀s ∈ R
Theorem (Teel):
For an integrator chain of any order and for any set (Li,Mi)where Li ≤ Mi and Mi < 1
2Li+1, there exists hi for all linear
saturations σ i such that the bounded control
u = −σ n(hn(x) + σ n−1(hn−1(x) + ⋅ ⋅ ⋅ + σ 1(h1(x)) . . . )
results in global asymptotic stability for the closed loop system.
Sketch of proof: (n=3, Li = Mi)Consider a state transformation y = Tx which transforms theintegrator chain into
y = Ay + Buwhere
A =
0 1 1
0 0 1
0 0 0
, B =
1
1
1
The control law
u = −σ 3(y3 + σ 2(y2 + σ 1(y1)))
will give the closed loop system
y1 = y2 + y3 −σ 3(y3 + σ 2(y2+ σ 1(y1)))y2 = y3 −σ 3(y3 + σ 2(y2+ σ 1(y1)))y3 = −σ 3(y3 + σ 2(y2+ σ 1(y1)))
How does y3 evolve ?Let V3 = y2
3;
V3 = −2y3σ 3(y3 + σ 2(y2 + σ 1(y1)))
As hσ 2(.)h ≤ M2 < 1
2L3 ,
V3 < 0 for all hy3h > 1
2L3
; hy3h will decrease.
In finite time hy3h will be < 1
2L3 and σ 3 will now operate in the
linear region.(Note: no finite escape for the other states.)
6

y2 = y3 − (y3 + σ 2(y2 + σ 1(y1)))= −σ 2(y2+ σ 1(y1)))
Same kind of argument shows us that after finite time, theclosed loop will look like
y1 = −y1y2 = −y1 − y2y3 = −y1 − y2 − y3
i.e. after a finite time, the dynamics are exponentially stable
Remark:Although we have found a globally stabilizing, bounded, controllaw, u, the internal states may have huge overshoots !!
Integrator forwarding
strict-feedforward systems
x1 = x2 + f1(x2, x3, . . . , xn,u)...
xn−1 = xn + fn−1(xn,u)xn = u
Due to the lack of feedback connections, solutions alwaysexists and are of the form
xn(t) = xn(0) +∫ t
0
u(s)ds
xn−1(t) = xn−1(0) +∫ t
0
(xn(s) + fn−1(xn(s),u(s)))ds
...
1. Begin with stabilizing the system xn = unUse e.g. Vn = x2n and un = −xn
2. Augment the control lawun−1(xn−1, xn) = un(xn) + vn−1such that un−1 stabilizes the cascade
xn−1 = xn + fn−1(xn,u)xn = un−1
...
k. Augment the control lawuk(xk, xk+1) = un(xk+1) + vksuch that uk stabilizes the cascade
xk = xk+1 + fk(. . . )Xk+1 = Fk+1(. . . ,uk)
How is the cascade (in step k) stabilized?
We have a cascade of one GAS/LES system and a ISS-system with a linear growth-condition.
There exists a Lyapunov function for the (sub-) system
Vk = Vk+1+ 12x2k +
∫ ∞
0
xk(s) fk(Xk+1(s))ds
It can be shown that Vkhuk=−LnVk < 0 and finally u1 minimizes acost functional of the form
J =∫ ∞
0
(l(x) + u2)ds
7

The cross-term can only be exactly evaluated for very simplesystems. In other cases it has to be numerically evaluated orapproximated by i.e. Taylor series
Connection to Teel’s results:
To avoid computations of the integrals we can use nested low-gain (saturated) control.Also showed to be GAS/LES for the integrator chain, butLAS/LES for the general strict-feedforward system.
(Compare with high-gain design in backstepping)
Can use a feedback passivation design for a system if
1. A relative degree condition satisfied
2. The system is weakly minimum phase
Backstepping is a recursive way of finding a relative degreeone output.
Integrator forwarding allows us to stabilize weakly non-minimum phase systems.
Conclusions
• Global/semiglobal stabilization of strict-feedforward system( No exact linearization possible )
• Tracking results reported
• Relaxes weakly minimum phase-condition
• Integration forwarding - “necessary” to simplify controller
8

Nonlinear Control Theory
Lecture 9
• Periodic Perturbations
• Averaging
• Singular Perturbations
Khalil Chapter (9, 10) 10.3-10.6, 11
Today: Two Time-scales
Averaging
x = ε f (t, x, ε)
The state x moves slowly compared to f .
Singular perturbations
x = f (t, x, z, ε)ε z = n(t, x, z, ε)
The state x moves slowly compared to z.
Example: Vibrating Pendulum I
m
θ
l
a sinω t
x = l sin(θ ), y = l cos(θ ) − a sin(ω t)
Newton’s law in tangential direction
m(lθ − aω2 sinω t sinθ )= −mn sinθ − k(lθ + aω cosω t sinθ )
(incl. viscous friction in joint)
Let ε = a/l,τ = ω t, α = ω 0l/ωa, andβ = k/mω 0
x1 = θx2 = ε −1(dθ/dτ ) + cosτ sinθ
f1(τ , x) = x2 − cosτ sin x1f2(τ , x) = −α β x2 − α 2 sin x1
+x2 cosτ cos x1 − cos2 τ sin x1 cos x1
the state equation is given by
dx
dτ= ε f (τ , x)
1

Averaging Assumptions
Consider the system
x = ε f (t, x, ε), x(0) = x0
where f and its derivatives up to secondorder are continuous and bounded.
Let xav be defined by the equations
xav = ε fav(xav), xav(0) = x0
fav(x) = limT→∞
1T
∫ T
0f (τ , x,0)dτ
Example: Vibrating Pendulum II
The averaged system
x = ε fav(x)
= ε[
x2
−α β x2 − α 2 sin x1 − 14 sin2x1
]
has
V favV x (π ,0) =
[
0 1
α 2 − 0.5 −α β
]
which is Hurwitz for 0 < α < 1/√2, β > 0.
Can this be used for rigorous conclusions?
Periodic Averaging Theorem
Let f be periodic in t with period T .
Let x = 0 be an exponentially stableequilibrium of xav = ε f (xav).If hx0h is sufficiently small, then
x(t, ε) = xav(t, ε) + O(ε) for all t ∈ [0, ∞]
Furthermore, for sufficiently small ε > 0,the equation x = ε f (t, x, ε ) has a uniqueexponentially stable periodic solution ofperiod T in an O(ε ) neighborhood of x = 0.
General Averaging Theorem
Under certain conditions on the conver-gence of
fav(x) = limT→∞
1T
∫ T
0f (τ , x,0)dτ
there exists a C > 0 such that for suffi-ciently small ε > 0
hx(t, ε) − xav(t, ε)h < Cε
for all t ∈ [0,1/ε ].
2

Example: Vibrating Pendulum III
The Jacobian of the averaged system isHurwitz for 0 < α < 1/
√2, β > 0.
For a/l sufficiently small and
ω >√2ω0l/a
the unstable pendulum equilibrium (θ , θ ) =(π ,0) is therefore stabilized by the vibra-tions.
Periodic Perturbation Theorem
Consider
x = f (x) + εn(t, x, ε)
where f , n, V f /Vx and Vn/Vx are continu-ous and bounded.
Let n be periodic in t with period T .
Let x = 0 be an exponentially stableequilibrium point for ε = 0.Then, for sufficiently small ε > 0, there is aunique periodic solution
x(t, ε) = O(ε)
which is exponentially stable.
Proof ideas ofPeriodic Perturbation Theorem
Let φ(t, x0, ε ) be the solution of
x = f (x) + εn(t, x, ε), x(0) = x0
• Exponential stability of x = 0 for ε = 0,plus bounds on the magnitude of n,shows existence of a bounded solutionx for small ε > 0.
• The implicit function theorem showssolvability of
x = φ(T ,0, x, ε)
for small ε . This gives periodicity of x.
• Put z = x − x. Exponential stabilityof x = 0 for ε = 0 gives exponentialstability of z= 0 for small ε > 0.
Proof idea of Averaging Theorem
For small ε > 0 define u and y by
u(t, x) =∫ t
0[ f (τ , x,0) − fav(x)]dτ
x = y+ εu(t, y)
Then
x = y+ ε Vu(t, y)V t + ε Vu(t, y)
V y y
[
I + ε VuV y
]
y = ε f (t, y+ εu, ε) − ε VuV t (t, y)
= ε fav(y) + ε 2p(t, y, ε)
With s = ε t,dy
ds= fav(y) + ε q
( s
ε , y, ε)
which has a unique and exponentially stableperiodic solution for small ε . This gives thedesired result.
3

Application:Second Order Oscillators
For the second order system
y+ ω2 y = εn(y, y) (1)
introduce
y = r sinφy/ω = r cosφ
f (φ , r, ε) = n(r sinφ ,ω r cos φ) cosφω2 − (ε/r)n(r sinφ ,ω r cos φ) sinφ
fav(r) = 12π
∫ 2π
0f (φ , r,0)dφ
= 12πω2
∫ 2π
0n(r sinφ ,ω r cos φ) cosφdφ
Then (1) is equivalent to
dr
dφ = ε f (φ , r, ε)
and the periodic averaging theorem may beapplied.
Illustration: Van der Pol Oscillator I
+
−
CL
iC iL
i
V
resistive
element
linear osc-part
For an ordinary resistance we will get adamped oscillation.For a negative resistance/admittancechosen as
i = h(V ) = (−V + 13V 3)
︸ ︷︷ ︸
nives van der Pol eq.
we get
iC + iL + i = 0, i = h(V );
CLd2V
dt2+ V + Lh′(V )dV
dt= 0
Example: Van der Pol Oscillator I
The vacuum tube circuit equation(a k a the van der Pol equation)
y+ y = ε y(1− y2)
gives
fav(r) = 12π
∫ 2π
0r cosφ(1− r2 sin2φ) cosφdφ
= 12r − 18r3
The averaged system
dr
dφ = ε(
12r − 18r3
)
has equilibria r = 0, r = 2 with
dfav
dr
∣
∣
∣
∣
r=2= −1
so small ε give a stable limit cycle, which isclose to circular with radius r = 2.
Singular Perturbations
Consider equations of the form
x = f (t, x, z, ε), x(0) = x0ε z = n(t, x, z, ε) z(0) = z0
For small ε > 0, the first equation describesthe slow dynamics, while the secondequation defines the fast dynamics.
The main idea will be to approximate x withthe solution of the reduced problem
˙x = f (t, x, h(t, x),0) x(0) = x0
where h(t, x) is defined by the equation
0 = n(t, x, h(t, x),0)
4

Example: DC Motor I
u
Ri
L
ω J
EMK = kω
Jdωdt
= ki
Ldi
dt= −kω − Ri+ u
With x = ω , z= i and ε = Lk2/JR2 we get
x = z
ε z = −x − z+ u
Linear Singular PerturbationTheorem
Let the matrix A22 have nonzero eigen-values γ 1, . . . ,γ m and let λ1, . . . , λn be theeigenvalues of A0 = A11 − A12A−1
22 A21.
Then, ∀δ > 0 ∃ε 0 > 0 such that theeigenvalues α 1, . . . ,α n+m of the matrix
[
A11 A12
A21/ε A22/ε
]
satisfy the bounds
hλ i − α ih < δ , i = 1, . . . , nhγ i−n − εα ih < δ , i = n+ 1, . . . , n+m
for 0 < ε < ε 0.
Proof
A22 is invertible, so it follows from theimplicit function theorem that for sufficientlysmall ε the Riccati equation
εA11Pε + A12 − εPε A21Pε − Pε A22 = 0
has a unique solution Pε = A12A−122 + O(ε ).
The desired result now follows from thesimilarity transformation
[
I −εPε
0 I
] [
A11 A12
A21/ε A22/ε
] [
I εPε
0 I
]
=[
I −εPε
0 I
][
A11 A12 + εA11Pε
A21/ε A22/ε + A21Pε
]
=[
A0 + O(ε) 0
∗ A22/ε + O(1)
]
Example: DC Motor II
In the example
x = z
ε z = −x − z+ u
we have[
A11 A12
A21 A22
]
=[
0 1
−1 −1
]
A11 − A12A−122 A21 = −1
so stability of the DC motor model for small
ε = Lk2
JR2
is verified.
See Khalil for example where reduced systemis stable but fast dynamics unstable.
5

The Boundary-Layer System
For fixed (t, x) the boundary layer system
d y
dτ= n(t, x, y+ h(t, x),0), y(0) = z0− h(0, x0)
describes the fast dynamics, disregardingvariations in the slow variables t, x.
Tikhonov’s Theorem
Consider a singular perturbation problemwith f , n,h, Vn/Vx ∈ C1. Assume that thereduced problem has a unique boundedsolution x on [0,T ] and that the equilibriumy = 0 of the boundary layer problem isexponentially stable uniformly in (t, x). Then
x(t, ε) = x(t) + O(ε)z(t, ε) = h(t, x(t)) + y(t/ε) + O(ε)
uniformly for t ∈ [0,T ].
Example: High Gain Feedback
+ +
− −
ψ (⋅) k1/s
k2
uup
xp = ... y
y = ..
Closed loop system
xp = Axp + Bup1k1up = ψ (u− up − k2Cxp)
Reduced model
xp = (A− Bk2C)xp + Bu
Proof ideas of Tikhonov’sTheorem
Replace f and n with F and G that areidentical for hxh < r, but nicer for large x.
For small ε , G(t, x, y, ε ) is close toG(t, x, y,0).
y-bound for G(⋅, ⋅, ⋅,0)-equation
; y-bound for G-equation
; x, y-bound for F,G-equations
For small ε > 0, the x, y-solutions of theF,G-equations will satisfy hxh < r. Hence,they also solve the f , n-equations
6

The Slow Manifold
For small ε > 0, the system
x = f (x, z)ε z = n(x, z)
has the invariant manifold
z = H(x, ε)
It can often be computed approximately byTaylor expansion
H(x, ε) = H0(x) + εH1(x) + ε 2H2(x) + ⋅ ⋅ ⋅
where H0 satisfies
0 = n(x,H0)
The Fast Manifold
ε = 0.001x ’ = − x + z z ’ = 1/epsilon atan(1 − z − x)
epsilon = 0.001
−2 −1 0 1 2 3 4
−4
−3
−2
−1
0
1
2
x
z
ε = 0.1x ’ = − x + z z ’ = 1/epsilon atan(1 − z − x)
epsilon = 0.1
−2 −1 0 1 2 3 4
−4
−3
−2
−1
0
1
2
x
z
All solutions of
x = f (x, z)ε z = n(x, z)
approach the slow manifold z = h(x) = 1 − xalong a fast manifold approximately satisfying
x = constant
Example: Van der Pol Oscillator III
Consider
d2v
ds2− µ(1− v2)dv
ds+ v = 0
With
x = − 1µdv
ds+ v− 1
3v3
z = v
t = s/µε = 1/µ2
we have the system
x = z
ε z = −x + z− 13z3
with slow manifold
x = z− 13z3
Illustration: Van der Pol III
Phase plot for van der Pol exampleε = 0.001
x ’ = z z ’ = 1/epsilon ( − x + z − 1/3 z3)
epsilon = 0.001
−4 −3 −2 −1 0 1 2 3 4
−4
−3
−2
−1
0
1
2
3
4
x
z
ε = 0.1x ’ = z z ’ = 1/epsilon ( − x + z − 1/3 z3)
epsilon = 0.1
−4 −3 −2 −1 0 1 2 3 4
−4
−3
−2
−1
0
1
2
3
4
x
z
The red dotted curve is the slow manifoldx = z− z3/3.All solutions approch this along a fastmanifold approximately satisfying
x = constant7