
Newton’s Laws of Motion Claude A Pruneau Physics and Astronomy Wayne State University PHY 5200...
39
Newton’s Laws of Motion Claude A Pruneau Physics and Astronomy Wayne State University PHY 5200 Mechanical Phenomena Click to edit Master title style Click to edit Master subtitle style 1 Projectile Motion PHY 5200 Mechanical Phenomena Claude A Pruneau Physics and Astronomy Department Wayne State University Dec 2005.
-
date post
21-Dec-2015 -
Category
Documents
-
view
244 -
download
0
Transcript of Newton’s Laws of Motion Claude A Pruneau Physics and Astronomy Wayne State University PHY 5200...

Newton’s Laws of Motion
Claude A Pruneau
Physics and Astronomy
Wayne State University
PHY 5200 Mechanical Phenomena
Click to edit Master title style
Click to edit Master subtitle style
1
Projectile Motion
PHY 5200 Mechanical Phenomena
Claude A PruneauPhysics and Astronomy DepartmentWayne State UniversityDec 2005.
ContentContent
• Projectile Motion– Air Resistance– Linear Air Resistance– Trajectory and Range in a Linear Medium– Quadratic Air Resistance
• Charge Particle Motion– Motion of a Charged Particle in a Uniform Field– Complex Exponentials– Motion in a Magnetic Field
Description of Motion with F=ma
• F=ma, as a law of Nature applies to a very wide range of problems whose solution vary greatly depending on the type of force involved.
• Forces can be categorized as being “fundamental” or “effective” forces.
• Forces can also be categorized according to the degree of difficulty inherent in solving the 2nd order differential equation F = m a.– Function of position only– Function of speed, or velocity– Separable and non-separable forces
• In this Chapter– Separable forces which depend on position and velocity.– Non separable forces.
Air Resistance
• Air Resistance is neglected in introductory treatment of projectile motion.
• Air Resistance is however often non-negligible and must be accounted for to properly describe the trajectories of projectiles. – While the effect of air resistance may be very small in some
cases, it can be rather important and complicated e.g. motion of a golf ball.
• One also need a way/technique to determine whether air resistance is important in any given situation.

Air Resistance - Basic Facts
• Air resistance is known under different names– Drag– Retardation Force– Resistive Force
• Basic Facts and Characteristics– Not a fundamental force…– Friction force resulting from different atomic phenomena– Depends on the velocity relative to the embedding fluid.– Direction of the force opposite to the velocity (typically).
• True for spherical objects, a good and sufficient approximation for many other objects.
• Not a good approximation for motion of a wing (airplane) - additional force involved called “lift”.
– Here, we will only consider cases where the force is anti-parallel to the velocity - no sideways force.

Air Resistance - Drag Force
• Consider retardation force strictly anti-parallel to the velocity.
• Where
f(v) is the magnitude of the force.
• Measurements reveal f(v) is complicated - especially near the speed of sound…
• At low speed, one can write as a good approximation:
rw =m
rg
rf =−f (v)v̂
v̂
rf =−f (v)v̂
v̂ =
rv r
v
f (v)=bv+ cv2 = flin + fquad

Air Resistance - Definitions
f (v)=bv+ cv2 = flin + fquad
flin ≡bv Viscous drag• Proportional to viscosity of the medium
and linear size of object.
Inertial• Must accelerate mass of air which is in
constant collision. • Proportional to density of the medium
and cross section of object.
fquad ≡cv2
For a spherical projectile (e.g. canon ball, baseball, drop of rain):
b =βD
c =γD2Where D is the diameter of the sphereβand γ depend on the nature of the mediumAt STP in air:
β =1.6 ×10−4Ngs / m2
γ = 0.25Ngs / m4

Air Resistance - Linear or Quadratic
• Often, either of the linear or quadratic terms can be neglected.
• To determine whether this happens in a specific problem, consider
• Example: Baseball and Liquid Drops
• A baseball has a diameter of D = 7 cm, and travel at speed of order v=5 m/s.
• A drop of rain has D = 1 mm and v=0.6 m/s
• Millikan Oil Drop Experiments, D=1.5 mm and v=5x10-5 m/s.
fquadflin
=cv2
bv=γDβ
v= 1.6 ×103 sm2( )Dv
= 1: linear case
? 1: quadratic case
⎧
⎨⎪
⎩⎪
fquadflin
≈600
fquadflin
≈1
fquadflin
≈10−7
rf =−cv2v̂
Neither term can be neglected.
rf =−b
rv

Air Resistance - Reynolds Number
• The linear term drag is proportional to the viscosity, • The quadratic term is related to the density of the
fluid, .• One finds
fquadflin
: R ≡Dv Reynolds Number

Case 1: Linear Air Resistance
• Consider the motion of projectile for which one can neglect the quadratic drag term.
• From the 2nd law of Newton:
• Independent of position, thus:
• Furthermore, it is separable in coordinates (x,y,z).
• By contrast, for f(v)~v2, one gets coupled y vs x motion
mr&&r =
rF =m
rg−b
rv
rw =m
rg
rf =−b
rv
v̂
mr&v =m
rg−b
rv A 1st order differential equation
y
x
m&vx =−bvx
m&vy =mg−bvy
Two separate differential equationsUncoupled.
rf =−cv2v̂=−c vx
2 + vy2 rv
m&vx =−c vx2 + vy
2vx
m&vy =mg−c vx2 + vy
2vy
Case 1: Linear Air Resistance - Horizontal Motion
• Consider an object moving horizontally in a resistive linear medium.
• Assume vx = vx0, x = 0 at t = 0.
• Assume the only relevant force is the drag force.
• Obviously, the object will slow down
• Define (for convenience):
• Thus, one must solve:
• Clearly:
• Which can be re-written:
rf =−b
rv
&vx =−
bm
vx
k =bm
&vx =
dvx
dt=−kvx
dvxvx
=−kdtdvxvx
∫ =−k dt∫ lnvx =−kt+C
vx (t)=vx0e−t/τ
with τ =1 / k = m / b
Velocity exhibits exponential decay
Case 1: Linear Air Resistance - Horizontal Motion (cont’d)
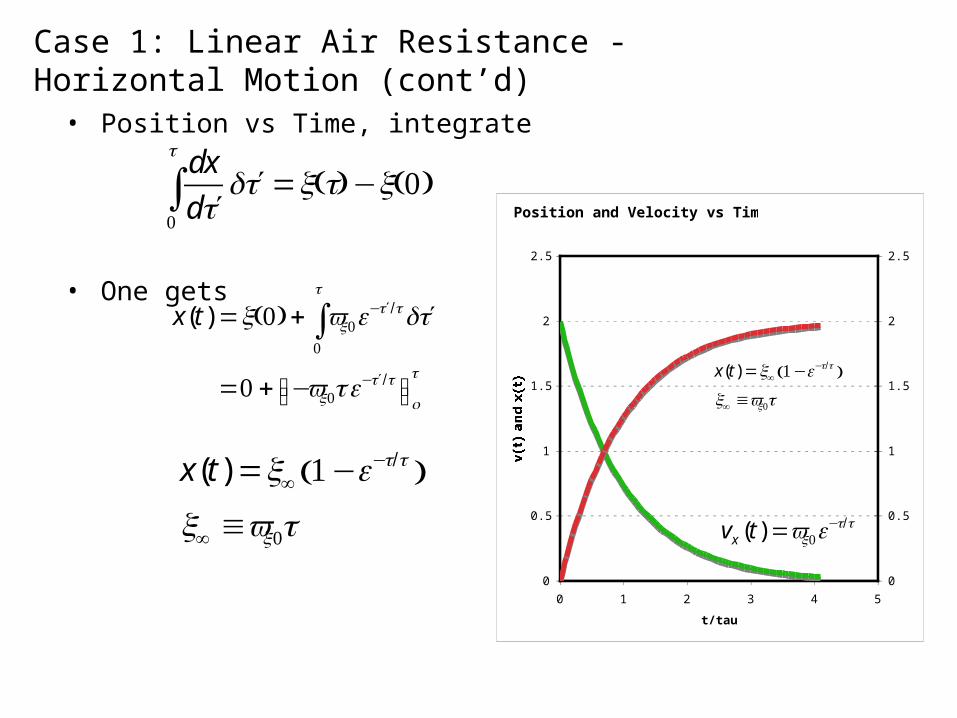
• Position vs Time, integrate
• One gets
dx
d ′td ′t
0
t
∫ =x(t)−x(0)
x(t)=x(0) + vx0e− ′t /τd ′t
0
t
∫
=0 + −vx0τe− ′t /τ⎡⎣ ⎤⎦o
t
x(t)=x∞ 1−e−t/τ( )
x∞ ≡vx0τ
Position and Velocity vs Time
0
0.5
1
1.5
2
2.5
0 1 2 3 4 5
t/tau
v(t) and x(t)
0
0.5
1
1.5
2
2.5
x(t)=x∞ 1−e−t/τ( )
x∞ ≡vx0τ
vx (t)=vx0e−t/τ

Vertical Motion with Linear Drag
• Consider motion of an object thrown vertically downward and subject to gravity and linear air resistance.
• Gravity accelerates the object down, the speed increases until the point when the retardation force becomes equal in magnitude to gravity. One then has terminal speed.
m&vy =mg−bvy
rw =m
rg
rf =−b
rv
v̂y
x
0 =mg−bvy vter =vy(a=0) =mgb
Note dependence on mass and linear drag coefficient b.Implies terminal speed is different for different objects.

Equation of vertical motion for linear drag
• The equation of vertical motion is determined by
• Given the definition of the terminal speed,
• One can write instead
• Or in terms of differentials
• Separate variables
• Change variable:
m&vy =mg−bvy
vter =mgb
m&vy =−b vy −vterm( )
mdvy =−b vy −vterm( )dt
dvyvy −vterm
=−bdtm
u =vy −vterm
du=dvy
du
u=−
bdtm
=−kdt
k =bmwhere

Equation of vertical motion for linear drag (cont’d)
• So we have …
• Integrate
• Or…
• Remember
• So, we get
• Now apply initial conditions: when t = 0, vy = vy0
• This implies
• The velocity as a function of time is thus given by
du
u=−
bdtm
=−kdt
du
u∫ =−k dt∫ lnu =−kt+C
u =vy −vterm
u =Ae−kt
vy −vter =Ae−t/τwith τ =1 / k = m / b
vy0 −vter =Ae−0/τ =A
vy =vter + vy0 −vter( )e−t/τ
vy =vy0e−t/τ + vter 1−e−t/τ( )
Equation of vertical motion for linear drag (cont’d)
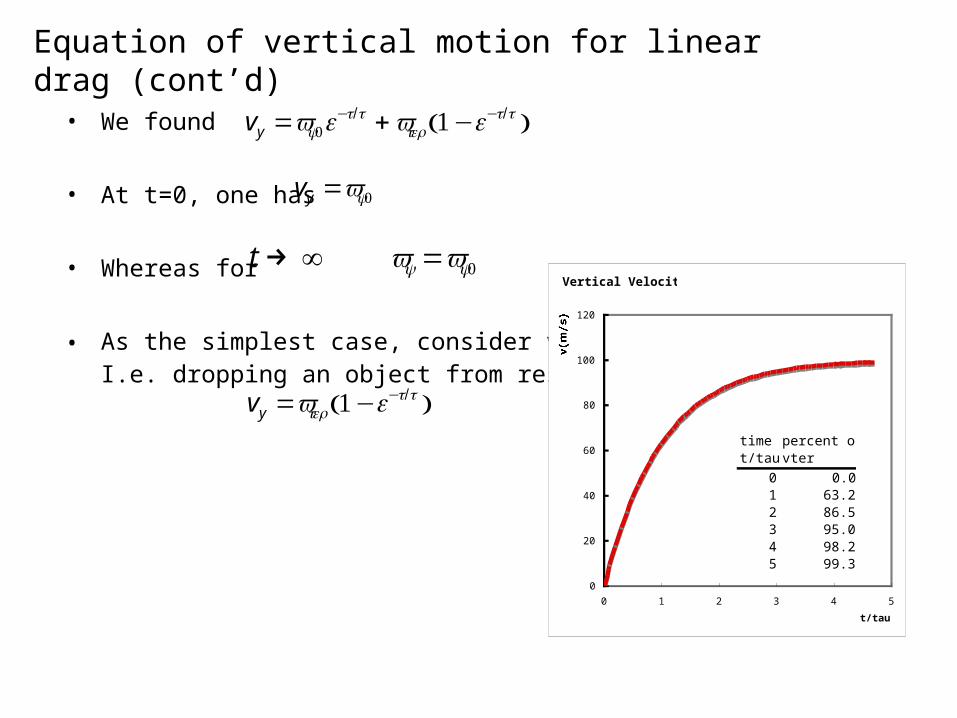
• We found
• At t=0, one has
• Whereas for
• As the simplest case, consider vy0=0,I.e. dropping an object from rest.
vy =vy0e−t/τ + vter 1−e−t/τ( )
vy =vy0
t → ∞ vy =vy0
vy =vter 1−e−t/τ( )
Vertical Velocity
0
20
40
60
80
100
120
0 1 2 3 4 5
t/tau
v(m/s)
time t/tau
percent of vter
0 0.01 63.22 86.53 95.04 98.25 99.3
Equation of vertical motion for linear drag (cont’d)
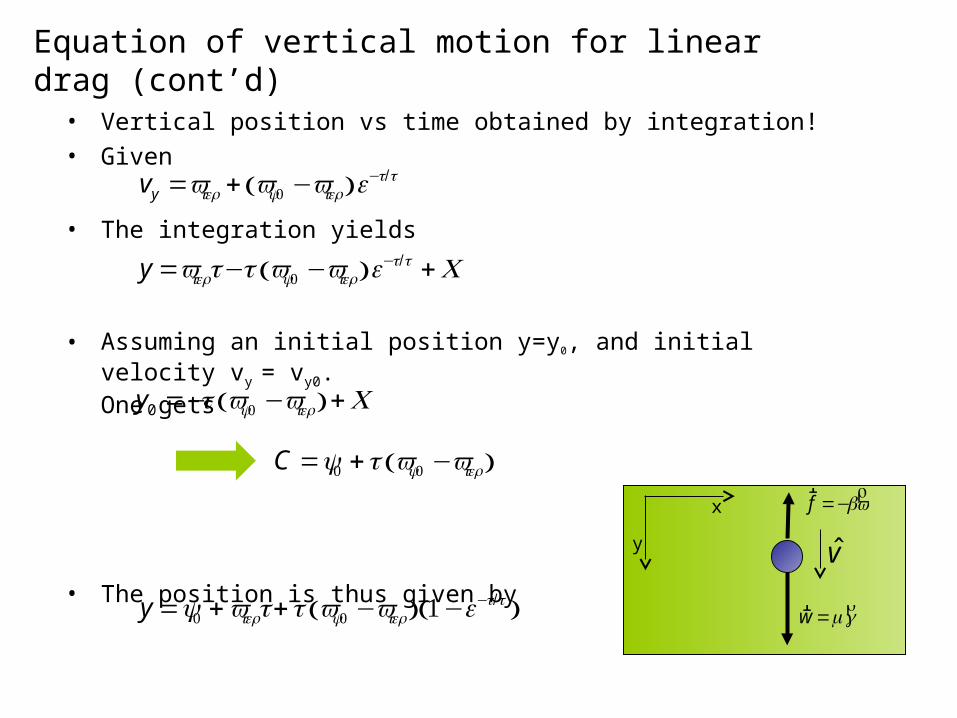
• Vertical position vs time obtained by integration!
• Given
• The integration yields
• Assuming an initial position y=y0, and initial velocity vy = vy0.One gets
• The position is thus given by
vy =vter + vy0 −vter( )e−t/τ
y =vtert−τ vy0 −vter( )e−t/τ +C
y0 =−τ vy0 −vter( ) +C
C =y0 +τ vy0 −vter( )
y =y0 + vtert+τ vy0 −vter( ) 1−e−t/τ( ) rw =m
rg
rf =−b
rv
v̂y
x
Equation of vertical motion for linear drag (cont’d)
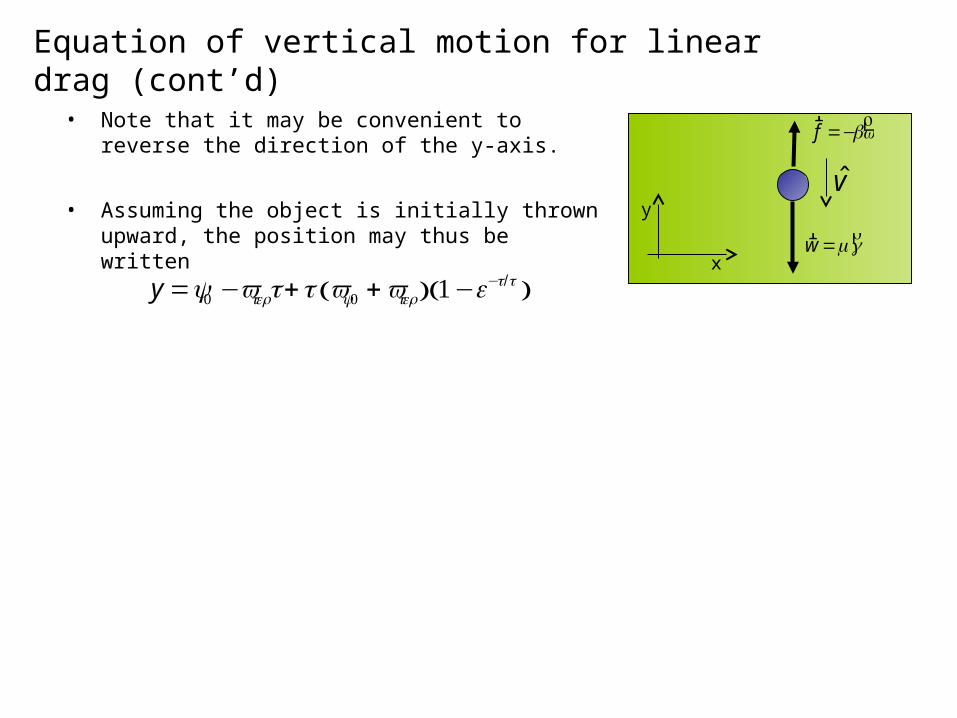
• Note that it may be convenient to reverse the direction of the y-axis.
• Assuming the object is initially thrown upward, the position may thus be written
rw =m
rg
rf =−b
rv
v̂y
x
y =y0 −vtert+τ vy0 + vter( ) 1−e−t/τ( )

Equation of motion for linear drag (cont’d)
• Combine horizontal and vertical equations to get the trajectory of a projectile.
• To obtain an equation of the form y=y(x), solve the 1st equation for t, and substitute in the second equation.
x(t)=vx0τ 1−e−t/τ( )y(t)=y0 −vtert+τ vy0 + vter( ) 1−e−t/τ( )
y(t)=y0 +vy0 + vter
vx0
x+ vterτ ln 1−x
vx0τ⎛
⎝⎜⎞
⎠⎟
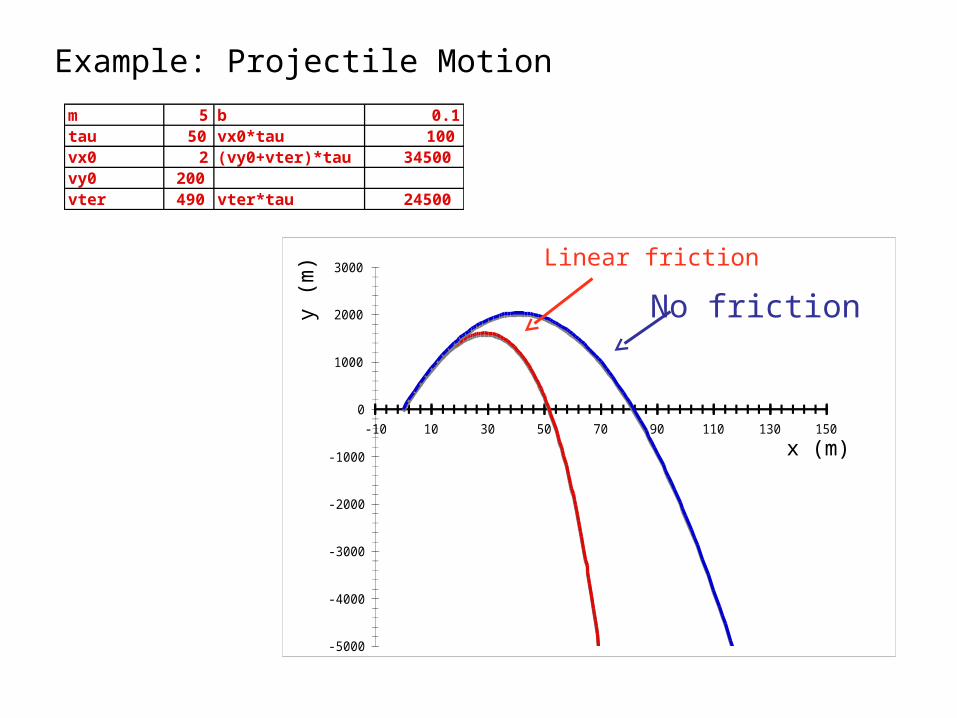
Example: Projectile Motion
m 5 b 0.1tau 50 vx0*tau 100vx0 2 (vy0+vter)*tau 34500vy0 200vter 490 vter*tau 24500
-5000
-4000
-3000
-2000
-1000
0
1000
2000
3000
-10 10 30 50 70 90 110 130 150
x (m)
y (m
)No friction
Linear friction

Horizontal Range
• In the absence of friction (vacuum), one has
• The range in vacuum is therefore
• For a system with linear drag, one has
x(t)=vxot
y(t) =vyot−0.982 t2
Rvac =2vxovyo
g
0 =vy0 + vter
vx0
R+ vterτ ln 1−R
vx0τ⎛
⎝⎜⎞
⎠⎟
A transcendental equation - cannot be solved analytically
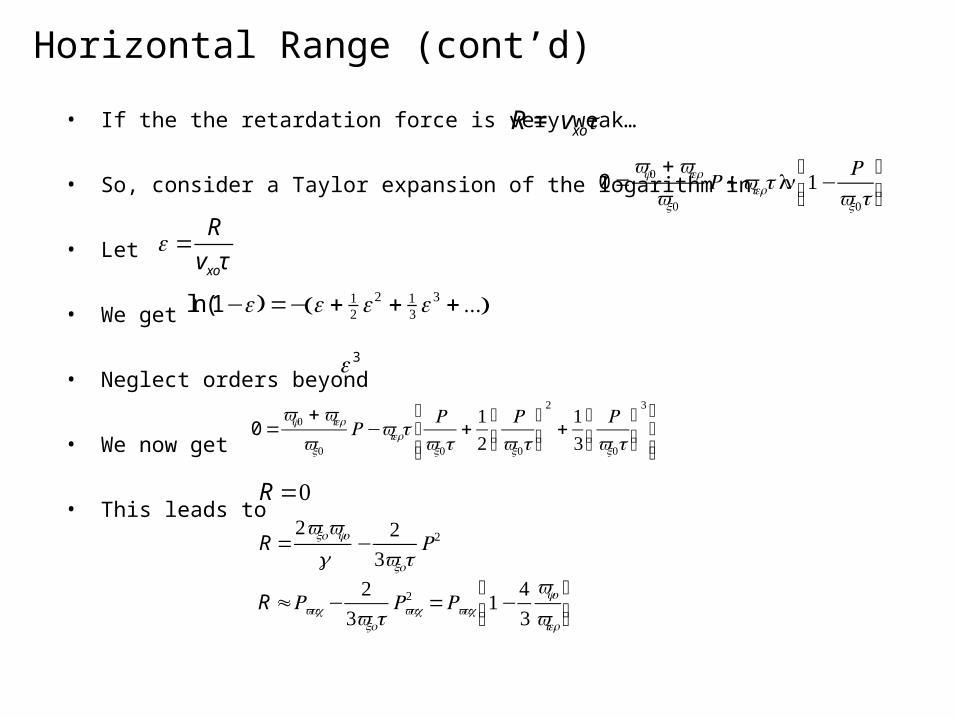
Horizontal Range (cont’d)
• If the the retardation force is very weak…
• So, consider a Taylor expansion of the logarithm in
• Let
• We get
• Neglect orders beyond
• We now get
• This leads to
R = vxoτ
0 =vy0 + vter
vx0
R+ vterτ ln 1−R
vx0τ⎛
⎝⎜⎞
⎠⎟
ε =R
vxoτ
ln(1−ε) =− ε + 12 ε
2 + 13 ε
3 + ...( )
ε 3
0 =vy0 + vter
vx0
R−vterτR
vx0τ+12
Rvx0τ
⎛
⎝⎜⎞
⎠⎟
2
+13
Rvx0τ
⎛
⎝⎜⎞
⎠⎟
3⎡
⎣⎢⎢
⎤
⎦⎥⎥
R =0
R =2vxovyo
g−
23vxoτ
R2
R ≈Rvac −2
3vxoτRvac
2 =Rvac 1−43
vyo
vter
⎛
⎝⎜⎞
⎠⎟

Quadratic Air Resistance
• For macroscopic projectiles, it is usually a better approximation to consider the drag force is quadratic
• Newton’s Law is thus
• Although this is a first order equation, it is NOT separable in x,y,z components of the velocity.
rf =−cv2rv
mr&v =m
rg−cv2rv
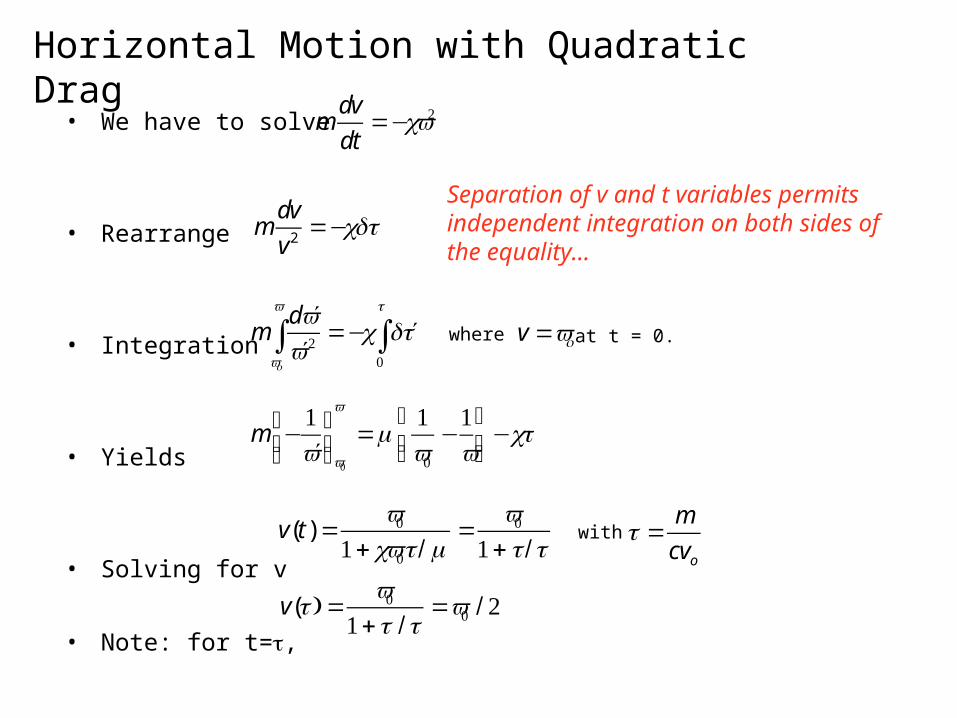
Horizontal Motion with Quadratic Drag
• We have to solve
• Rearrange
• Integration
• Yields
• Solving for v
• Note: for t=τ,
mdv
dt=−cv2
mdv
v2=−cdt
Separation of v and t variables permits independent integration on both sides of the equality…
md ′v′v 2
vo
v
∫ =−c d ′t0
t
∫ where v =vo at t = 0.
m −1′v
⎡⎣⎢
⎤⎦⎥v0
v
=m1v0
−1v
⎛
⎝⎜⎞
⎠⎟−ct
v(t)=v0
1+ cv0t / m=
v01+ t / τ
with τ =m
cvo
v(τ ) =v0
1+τ / τ=v0 / 2

Horizontal Motion with Quadratic Drag (cont’d)
• Horizontal position vs time obtained by integration …
• Never stops increasing
• By contrast to the “linear” case.
• Which saturates…
• Why? ! ?
• The retardation force becomes quite weak as soon as v<1.
• In realistic treatment, one must include both the linear and quadratic terms.
x(t)=x+ v( ′t )d ′t0
t
∫=v0τ ln(1+ t / τ )
0
2
4
6
8
10
12
0 5 10 15 20 25 30 35 40 45 50
0
10
20
30
40
50
60
70
0 5 10 15 20 25 30 35 40 45 50
v(t)=v0
1+ t / τ
x(t)=v0τ ln(1+ t / τ )
x(t)=vx0τ 1−e−t/τ( )

• Measuring the vertical position, y, down.
• Terminal velocity achieved for
• For the baseball of our earlier example, this yields ~ 35 m/s or 80 miles/hour
• Rewrite in terms of the terminal velocity
• Solve by separation of variables
• Integration yields
• Solve for v
• Integrate to find
Vertical Motion with Quadratic Drag
mdv
dt=mg−cv2
vter =mgc
dv
dt=g 1−
v2
vter2
⎛
⎝⎜⎞
⎠⎟
dv
1−v2
vter2
=gdt
vtergarctanh
v
vter
⎛
⎝⎜⎞
⎠⎟=t
v =vtertanhgtvter
⎛
⎝⎜⎞
⎠⎟
y =vter( )
2
gln cosh
gtvter
⎛
⎝⎜⎞
⎠⎟⎡
⎣⎢
⎤
⎦⎥
0
5
10
15
20
25
30
35
40
0 5 10 15 20 25 30
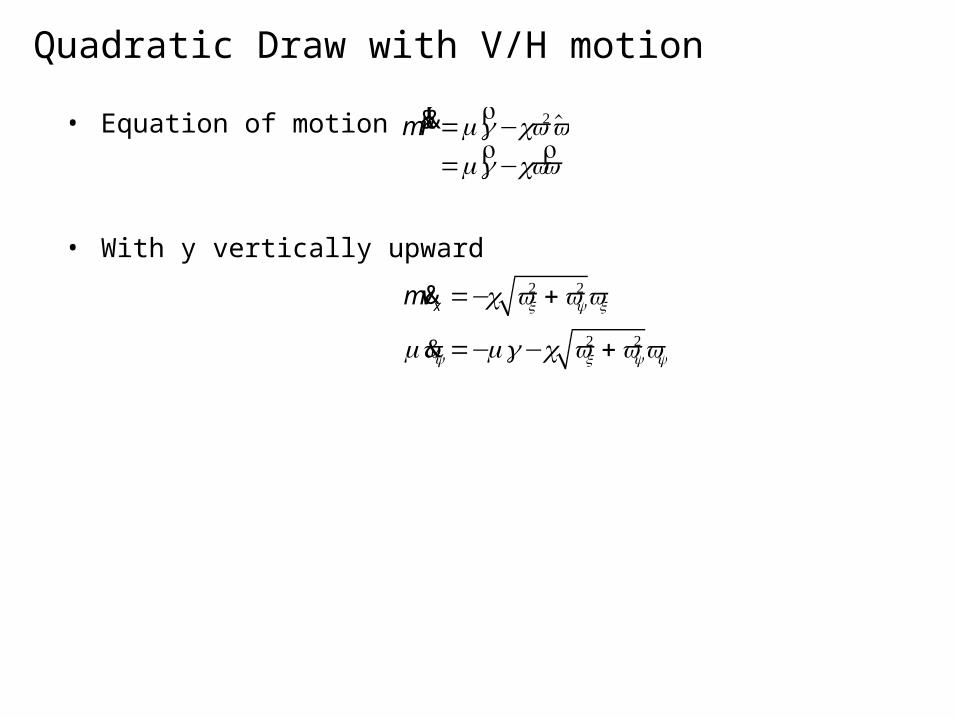
Quadratic Draw with V/H motion
• Equation of motion
• With y vertically upward
mr&&r =m
rg−cv2v̂
=mrg−cv
rv
m&vx =−c vx2 + vy
2vx
m&vy =−mg−c vx2 + vy
2vy
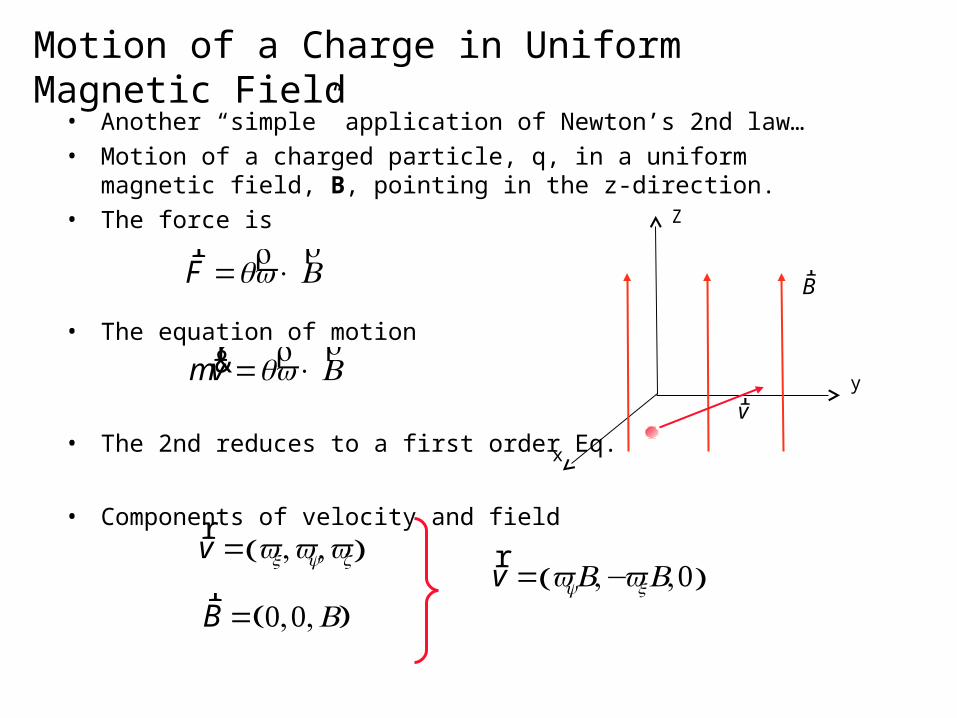
Motion of a Charge in Uniform Magnetic Field
• Another “simple” application of Newton’s 2nd law…
• Motion of a charged particle, q, in a uniform magnetic field, B, pointing in the z-direction.
• The force is
• The equation of motion
• The 2nd reduces to a first order Eq.
• Components of velocity and field
rF =q
rv×
rB
Z
x
y
rB
rv
mr&v =q
rv×
rB
rv = vx,vy,vz( )
rB = 0,0,B( )
rv = vyB,−vxB,0( )
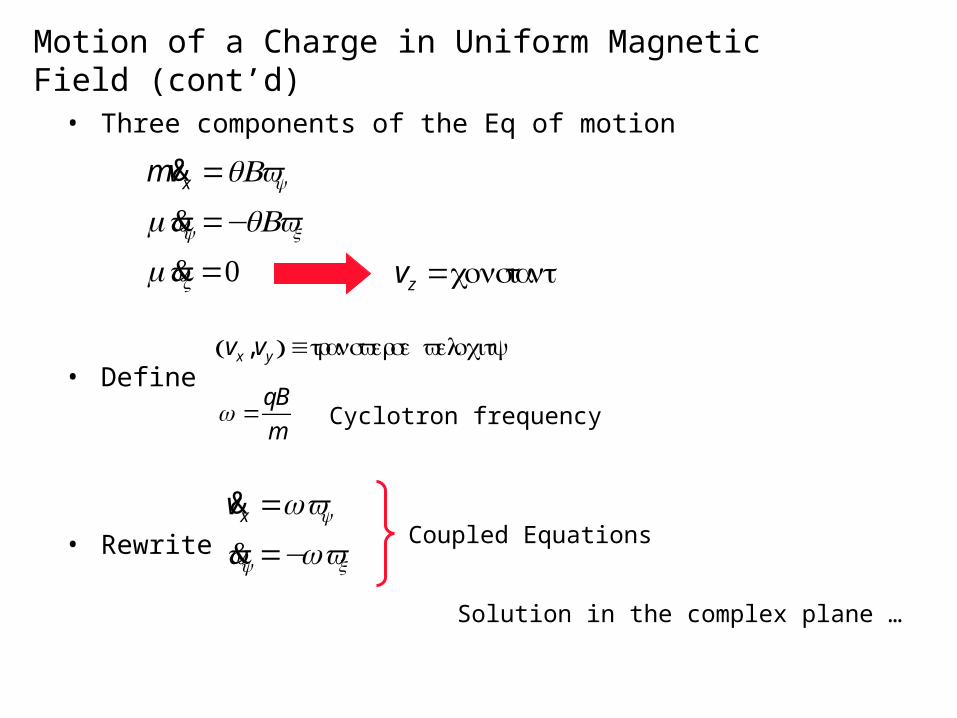
Motion of a Charge in Uniform Magnetic Field (cont’d)
• Three components of the Eq of motion
• Define
• Rewrite
m&vx =qBvy
m&vy =−qBvx
m&vz =0 vz =constant
ω =qB
m
vx ,vy( ) ≡transverse velocity
Cyclotron frequency
&vx =ωvy
&vy =−ωvx
Coupled Equations
Solution in the complex plane …
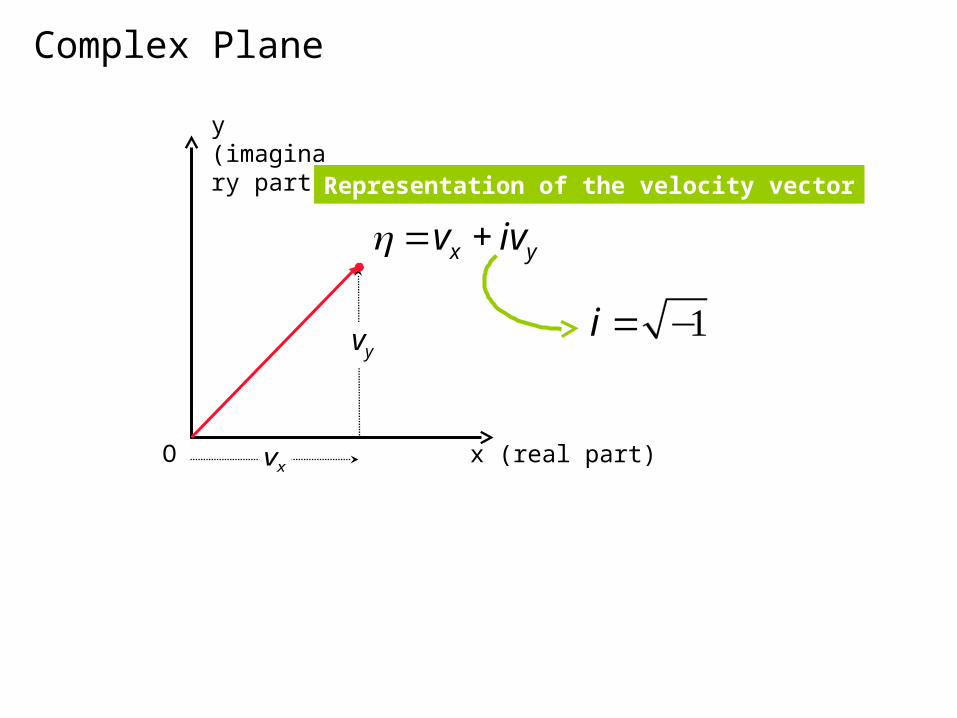
Complex Plane
O x (real part)
y (imaginary part)
=vx + ivy
vy
vx
Representation of the velocity vector
i = −1
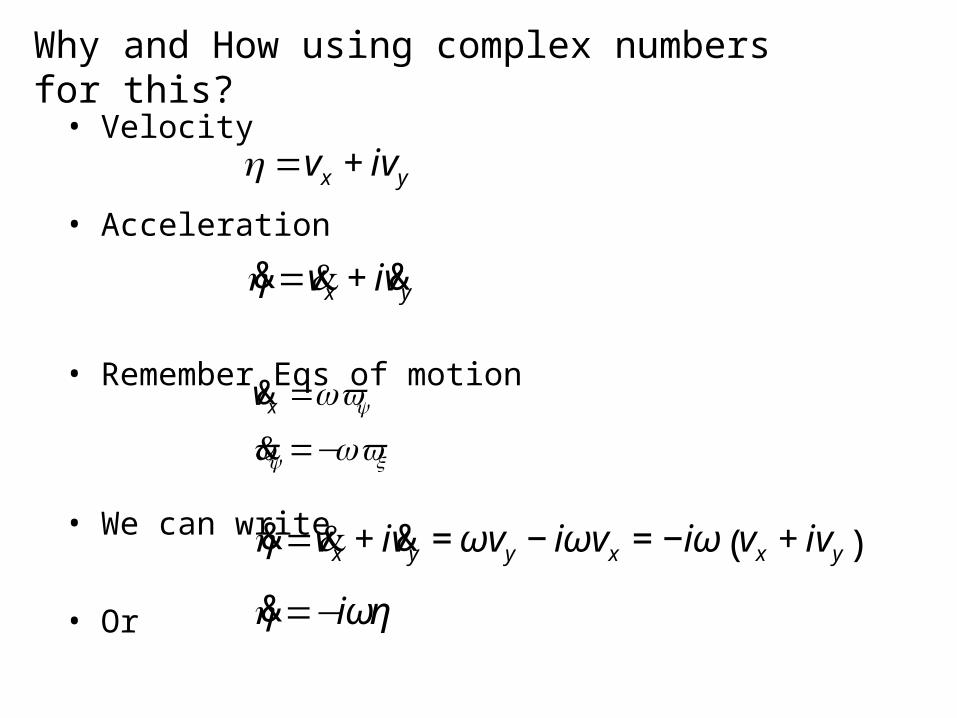
Why and How using complex numbers for this?
• Velocity
• Acceleration
• Remember Eqs of motion
• We can write
• Or
=vx + ivy
&vx =ωvy
&vy =−ωvx
& =&vx + i&vy
& =&vx + i&vy =ωvy − iωvx = −iω vx + ivy( )
& =−iωη

Why and How using … (cont’d)
• Equation of motion
• Solution
• Verify by substitution
& =−iωη
=Ae−iωt
ddt
=−iωAe−iωt =−iω
Complex Exponentials
• Taylor Expansion of Exponential
• The series converges for any value of z (real or complex, large or small).
• It satisfies
• And is indeed a general solution for
• So we were justified in assuming is a solution of the Eqs of motion.
ez =1+ z+
z2
2!+
z3
3!+L
d
dzAekz( ) =k Aekz( )
df (z)
dz=kf(z)
Complex Exponentials (cont’d)
The exponential of a purely imaginary number is
Separation of the real and imaginary parts - since i2=-1, i3=-I
We get Euler’s Formula
eθ =1+ iθ +
iθ( )2
2!+
iθ( )3
3!+
iθ( )4
4!+L
where θ is a real number
eθ = 1−
θ 2
2!+θ 4
4!−L
⎡
⎣⎢
⎤
⎦⎥+ i θ −
θ 3
3!+L
⎡
⎣⎢
⎤
⎦⎥
cosθ sinθ
eiθ =cosθ + isinθ
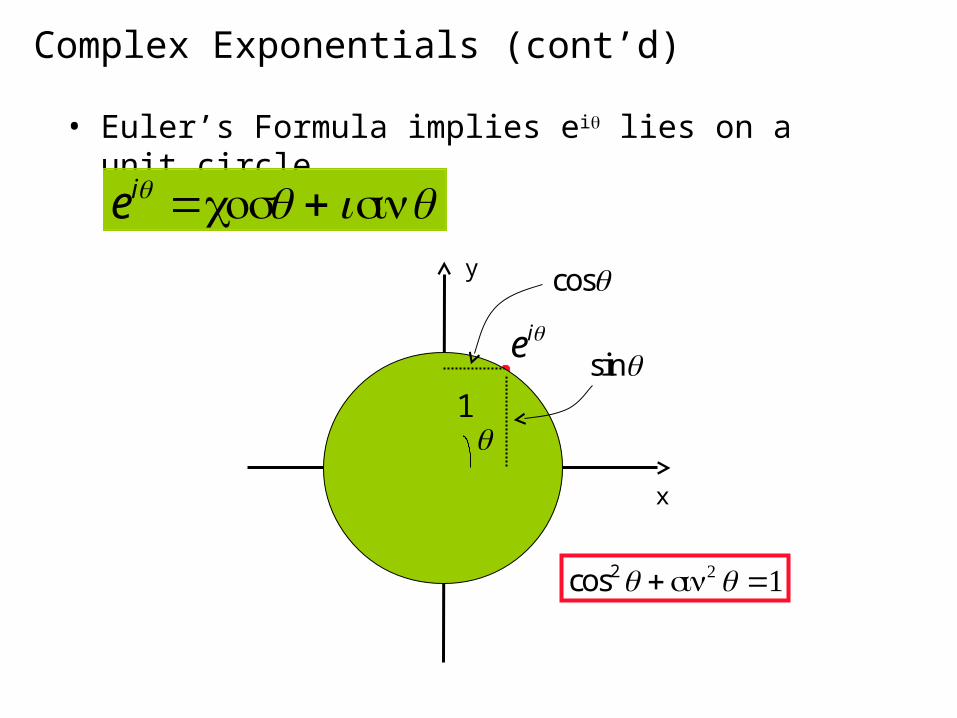
Complex Exponentials (cont’d)
• Euler’s Formula implies eiθ lies on a unit circle.
O
x
y
eiθcosθ
sinθ1θ
eiθ =cosθ + isinθ
cos2θ + sin2θ =1

Complex Exponentials (cont’d)
• A complex number expressed in the polar form
O
x
y
A =aeiθ
acosθ
asinθa θ
A =aeiθ =acosθ + iasinθ
a2 cos2θ + a2 sin2θ =a2
where a and θ are real numbers
−iωt =Ae−iωt
=Ae−iωt = aei θ −ωt( )
Amplitude
Phase
Angular Frequency

Solution for a charge in uniform B field
• vz constant implies
• The motion in the x-y plane best represented by introduction of complex number.
• The derivative of
• Integration of
z(t)=zo + vzot
=x + iyGreek letter “xi”
& =&x + i&y = vx + ivy = η
= dt∫ = Ae−iωtdt∫
=iA
ωe−iωt + constant
x + iy=Ce−iωt + X+iY( )

Solution for a charge in uniform B field (cont’d)
x + iy=Ce−iωt + X+iY( )
Redefine the z-axis so it passes through (X,Y)
x + iy=Ce−iωt
which for t = 0, impliesC =xo + iyo
ω =qB
m
Motion frequency
O
x
y
xo + iyo
ωtx + iy
xo2 + yo
2

Solution for a charge in uniform B field (cont’d)
x(t)+ iy(t) =Ce−iωt
z(t)=zo + vzot
ω =qB
m
O
x
y
xo + iyo
ωt
x + iy
xo2 + yo
2
Helix Motion


















