NEW LIMITATION CHANGE TO · oration, or conveying any rights or permission to manufacture, use, or...
87
UNCLASSIFIED AD NUMBER AD466393 NEW LIMITATION CHANGE TO Approved for public release, distribution unlimited FROM Distribution authorized to U.S. Gov't. agencies and their contractors; Administrative/Operational Use; May 1965. Other requests shall be referred to the Director, Air Force Aero Propulsion Laboratory, Attn: RTD, Wright-Patterson AFB, OH 45433. AUTHORITY AFAPL ltr, 21 Jul 1971 THIS PAGE IS UNCLASSIFIED
Transcript of NEW LIMITATION CHANGE TO · oration, or conveying any rights or permission to manufacture, use, or...

UNCLASSIFIED
AD NUMBER
AD466393
NEW LIMITATION CHANGE
TOApproved for public release, distributionunlimited
FROMDistribution authorized to U.S. Gov't.agencies and their contractors;Administrative/Operational Use; May 1965.Other requests shall be referred to theDirector, Air Force Aero PropulsionLaboratory, Attn: RTD, Wright-PattersonAFB, OH 45433.
AUTHORITY
AFAPL ltr, 21 Jul 1971
THIS PAGE IS UNCLASSIFIED

LLO
AFAPL -TR- 65-45Part IV
ROTOR-BEARING DYNAMICS DESIGN TECHNOLOGY,Part IV: Ball Bearing Design Data
P Lewis>" S L Malanoski
Mechanical Technology Incorporated
- •TECHNICAL REPORT AFAPL-TR-65-45,PART IV
may 1965 DODCi ~JUL2 196 W
Air Force Aem Propulsion Lahoatu'yResearch and Technology Division
Air Force System CommandWright-Patterson Air Force .Base, Okil
B
Best Available •Copy

When U.S. Government drawings, spocifications, or other. data are used 5r any pur-
pose other than a definitely related Government procurement operation, the Cover-
ment thereby incurs no responsibility nor any obligation whatsoever, mad the fact
that the government may have formulated, furnished, or in any way supplieJ the
said drawings, specifications, or other data, is not to be regarded by implication
or otherwise, or in any ianner licensing the holder or any other person or corp-oration, or conveying any rights or permission to manufacture, use, or sell any
patent invention that may in any way be related thereto.
Qualified users may obtain copies of this report from the Defense Documentation
Center.
Defense Documentatiun Center release to the Clearinghouse for Federal Scientific
and Technical Information (formerly OTS) is not authorized. Foreign announce-
sent and dissemination by the Defense Documentation Center is not authorized.
Release to foreign nationals is not authorized.
DDC release to OTS is not authorized in order to prevent foreign announcemenk and
distribution of this report. The distribution of this report is limited because
it contains technology identifiable with items on the strategic embargo li3ta
excluded from export or re-exports under U. S. Export Control Act of 1949
(63 Stat. 7), as amended (50 U.S.O. App. 2020, 2031), as implemented by AFI 400-10.
Copies of this report 4hould not be returnwe Lo the Research and Technology Div-
ision unless return is required by security considerations, contractual obligation.
or notice on a specific document. -...... ..NTION: Wem gmmuet or other Odzwfp, spee-ficatlons or other aak a% used far W• Punoeoother than in, canectim viLth & 1eflltj re,, ted.gove"raut P2ro at opaverati the U. B.0ovezmnt thezeby inec no reep;=ljj.ý-, noir aobligation *~ateoever; wd thes fact that tin Oow*=-Mnt My have ftnalate, faMiesh or In '&W Veysupplied the s aid dOwm s• spmifiostims, or otherdate is not to be reszd by ML11catlca or other.vise as In any er Ilom the bulder or MWother persm or corpo m or 0009 1.1% Uw rltwsor PemissIam to Nofmbim, use sel, M
PatetedInvention that mw in = W be elated.thereto.

LONAPI.T-54
AROTOR-BEARING DYNAMICS DESIGN TECHNOLOGY.Part WVe Ball1 Bearing esignl Data 1,ý
SBMalanoski. -
0 Mechanical Technology, Incepmdld., /V.,n,N. Y.*- Mi i , /TI- • -T/ -
S TECHNICAL PE .
0 may 165,
A F 4 i4..
Air Forco"e'uo Propulsion LaboratoryResearch and Technology Division
Air Force Systems CommandWright-Patterson Air Force Base, Ohio

FOREWOID
Thit report was prepared by Mechanical Technology Incorporated, 968 Albany-Shaker load, Latham, Hey York 12110, under USAF Contract No. AF 33(615)-1895.The contract was initiated under Project No. 3145, '"ynamic Energy ConversionTechnology", Task No. 314511, 'Nuclear Mechanical Power Units". The work wasadministered under the direction of the Air Force Aero Propulsion Laboratory,Research and Technology Division, with Mr. John L. Norris (APYL) acting asproject engineer. I
This report covers worl conducted from 1 April 1964 to I April 1965.
This report was submitted by the authors for review on 18 March 1965. It isPart IV of final documentation issued in multiple parts. This report alsois identified by the contractor's designation NTI-65-TI-35.
This technical report has been reviewed and is approved.
ARTHUR V. CHURCHILL, CheFuels and Lubricants BranchTechnical Support DivisionAir Force Aero Propulsion Laboratory

ABSTRACT
This Part IV of the Final Report presents design dsL& fr the stiffness character-
istics of ball bearings for use in analyzing thc dynamical perforPnance of a rotor.
'ae dynaic character!-tf_- of flutA f.1li bearings are given in PFor III which
also gives the methods for performing the analysis of the rotor-bearing system.
Design data are presented for the extra-light and light group of deep-grooved
and angular contact bearings undergoing either a pure radial load, puze axial
load, or combined radial load with axial preload. The data are given in graphical
form and cover both radial stiffness and loid-carrying capacity. A nominal damping
value for ball bearings, obtained from experimevtation, is suggested.
-, Some of the general guide rules for the selection of ball bearings are given.
These are concerned with fatigue life, limiting speeds, design, and lubrication.
Safe load levels are indicated.
Lit,
§

TABIZ O? COwTEWS
ABSTRA'i CT .................................... . . . ..... ... .... LLi
ILLUSTR•ATIONS ............... o...... #....................... v
1.• INTRODUCTION .......................... .......... 0.&. 0... t.... ...... 0
II. DESIGN REQUIREMENTS
Load Leve I ....................... ...........*• ........ 2
Ball bearing Dping.................•...................... 2
Race Curvatures ....... .......................... 2
Ball Bearings - Life............................o........... 4
Bearing Centrifugal Loadin ............. ..... 5
Effecte of Cyclic Loading on Bearin Lifen.................... 6
Lubricant Life ....... ... ............ 0.0..0.6..... . 0... ...... 12
III. DESIGN DATA
Description and Discuseion of Charts.........,............... 14
Table I Deep Groove Bearings ............. 0............. 17
Table I1 Angular Contact Barings...................... 18
Table III Axial Loaded Deep-Grooved Bearingso............ 19
Design Charts
Pure Radial Load ...................................... 20Pure Thrust Load .............. ,........ 25
Radial Load with Axial Preload......................0.... 34
IV. SAMPLE PROBLEMS TO ILLUSTRATE USE OF WSIGIF CHARTS
1. Pure Radial Loaded Bearing............................... 59
2. Unidirectional Thrust Loaded Bearinag..................... 59
3. Double-Acting Thrust Loaded Bearing ....................... 59
4. Radial Loaded, Axial Preloaded Angular Contact Bearing... 60
V. REFERENCES..... .... ............ ............ .62VI. APPENDIX
A. Analysis ........................................... 63
B. Computer Program, PN0182............................... 68
C. Nomenclature for Analysis................................ 76
iv
_L _ " .. .. 1-

ILLUSTRATIONS
FIGURE PAGE
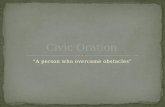
A Ball Bearing Schematic ........................................... 3
B Equivalent Load Ratio as a Function of Cyclic Load Ratio ......... a
C Bearing Life Ratio as a Function of Equivalent Load Ratio 10
D Bearing Life versus Temperature .................................. 13
1 Radial Stiffness for Deep Gruove Ball Beari:g-Pure Radial Load... 21
2 Radial Stiffness for Deep Groove Ball Bearings-Pure Radial Load.. 22
3 Radial Stiffness for Deep Groove Ball Bearings-Pure Radial Load.. 23
4 Radial Stiffness for Deep Groove Ball Bearings-Pure Radial Load.. 24
5 Axial Stiffness versus Axial Load - No Radial Load ............... 26
6 Axial Deflection versus Axial Load - No Radial Load ......... .... 27
7 Axial Stiffness versus Axial Load - No Radial Load .............. 2d
8 Axial Deflection versus Axial Load - No Radial Load ......... 29
9 Axial Stiffness versus Axial Load - No Radial Load .............. 30
10 Axial Deflection versus Axial Load - No Radial Load ........... 31
11 Axial Stiffness versus Axial Load - No Radial Load ..... ...... 32
12 Axial Deflection versus Axial Load - No Radial Load .... ..... 33
13 Radial Stiffness for Angular Contact Bearing, Pre Load - SelectedLight 10o - 250 ................ ...... ............ .......... .. 35
14 Radial Stiffness for Angular Contact Bearing1 Pre Load - SelectedLight 0o - 250 ........................ .. ...... 36
15 Radial Stiffness for Angular Contact Bearing, Pre Load - SelectedLight 13 0 2 5 -. ........................................... *... o 37
16 Radial Stiffness for Angular Contact Bearing,Pre Load - SelectedLight 3 0. - 25 ............... ..................... 38
17 Radial Stiffness for Angular Contact Bearing,Pre Load - Moderate
1o = 250 ...................... . . ............. 391i Radial Stiffness for Angular Contact BearingPre Load - Moderate
1o = 250..o ............ ..... ..... ................................ 40
19 Radial Stiffness for Angular Contact BearingPr. Load -Moderate
a 250.................. ... .. 4110
V

FIGURE PC
20 Radial Stiffness for Angular Contact BearingPre Load - Moderateo 25 ............................................. . ..... 42
21 Radial Stiffnea8 for Angular Contact Bearing,Pre-Load - PreferredHeavy oo - 25 ................................... ... ....... 43
22 Radial Stiffnes 8 for Angular Contact Bearing1 Pre Load - PreferredHeavy Oo - 25 .......................... ...................... 44
23 Radial StiffnesS for Angular Contact BearingPre Load - PreferredHeavy di,, S 25i ............... ......... . .................. a. 45
24 Radial Stiffness for Angular Contact BearingsPre Load - PreferredHeavy Sif e 250 .................................................gt
25 Radial Stiffness for Angular Contact Bearing,Pre Load - SelectedLight so - 15-.......................... ..*.. ............. 0 ... 47
26 Radial Stiffness for Angular Contact Bearing1 Pre Load - SelectedLight jo " 150 .................................................. 48
27 Radial Stiffness for Angular Contact BearingsPre Load - SelectedLi 150. 15° 0....................................... ..... 59
28 Radial Stiffness for Angular Contact BearingPre Load - SelectedLght o. 15° .. 0 ...................... 50
29 Radial Stiffness for Angular Contact Bearing. Pre Load - Moderate
30 Radial Stiffness for Angular Contact BearingPre Load - Moderate,so - 15 . ................................................... 0....... 52
31 radial Stiffness for Angular Contact Bearin;, Pre Load - PoderateHev - 15- 15............................... 53
32 Radial Stiffness for Angular Contact Bearing, Pre Load - Proderate
S 150 ...... * .......................... ............ 5633 Radial Stiffnese for Angular Contact Bearing, Pre Load - Preferred
Heavy 0° - 15 ................................... .............. 5534 Radial S t Iffne.8 for Agua Contac t Bearins, Pre Load - Pre ferried
35 Radial Stif fne8S for Angular Contact Bearin•h Pre Load - PreferredHeavy 130 " 15- . ......................... .0.0.......... 0..... 0.... 57
36 Radial StiffnesS for Angular Contact Bearing. Pre Load - PreferredHeavy ° " 15 .............................................. 58
vi
A ..

I
INTRODUCTION
The purpose of this report is to present design data for typical deep-groove andangular contact bearings of the comonly used light and extra-light series. Thedata may be used for ,rartous rotor-ball bearing system designs, in conjunctionwith our (NTI) critical speed and unbalance response programs.
The information is presented in graphical fo-m. It consists of load carrying
capacity, radial and axial stiffness, and load levels.
A complete description is given for all the variables used. A section entitled"Design Requirements" is written to describe various parameters and to presentdesign considerations, guidelines and limitations.
A number of examples on the application of the curves to specific cases are
included.
The analyses used are written in the Appendix, along with a computer program
listing of the calculational procedure.
If any particular case is not covered by the included curves, sore data may be
generated by computer program PWO-182, IlK 1620-60.
I

II
DESIGN REQUIREMENTS
A ball bearing schematic is shown as Fig. A to illustrate standard nmenclature.
Types of Bearings
The single row, deep groove ball bearhg will sustain radial loads and in addi-
tion a substantial thrust load in either direction. Wnen using this type of
bearing, careful alignment between the shaft and housing is essential.
The angular contact ball bearing is designed to support a thrust load in one
direction or a thrust load (preload) combined with a radial load. These bearings
can be mounted singly or, when the side surfaces are flush ground, in multiple,
either face-to-face or back-to-back for all combLnatior,- of thrust and radial
loading. The basic difference between th. two is the larger clearance and
greater shoulder height of the* angular contact bearing. Generally, this will
permit operation with hLgher thrust loads and at higher speeds than the deep
groove bearing.
Load Level
The load levels shown (C/P - 5 and C/P - 10) correspond to normally encountered
Hertz Stress levels of 230,000 and 186,000 psi respectively.
Ball Bearing Damping-
The only available damping information was from non-rotatLng tests on a grease
packed ball bearing (A-2) system. The measured value was in the order of 15-20
pounds sec/in. This should be used only as a "ballpark" since it should be
much higher in the rotating condition, and for larger bearing sizes.
Race Curvatures
SL•ce the question of stiffness and rotor dynamics will be a sajor factor at
high speeds, some design guidelines for this aspect are in order. Normally,
more open curvatures, one piece machined retainers, and gemnrous internal clear
ances are preferred. The normal curvatures are 51.6 percent for inner race and
53 percent for outer. Open curvatures, for high speed range, between 54 percent
and 57 percent for both inner and outer are used. The 57 percent curvature is
widely used and is included in the design discussion.
2

Contact
I Angle00
I d
0 0
IU e
0 sore
ILoad,1RadialLoad,_______P
Fig. A Ball learing Schematic
3
P OWW
7' m

3ll Bearinas - Life
Th. selection of ball bearings for various applications consider such factors as
load, speed, temperature, environment, design, and lubrication. However, the
initial sizing and selection is usually based upon the fatigue rating of the
bearing.
Based upon a statistical distribution proposed by Weibull and the analytical and
experimental work of Lundberg and Palagren the life of the bearing for a given
probability of survival has been found to vary inversely as the cube of thd
applied radial load. For other than radial loading, an equivalent radial load
is defined. A Specific Dynamic Capacity (C) Is defined as that radial load
which will result in a life of one million inner race revolutions with a 90
percent probability of survival. The AFrIA (Anti Friction Bearing Manufacturers
Association) has standardized on the following formula for (C):
0.7 2/3 1.8C = fc(i cos po) 0 7 3 d (1)
where i - the number of rows of balls in any one bearing
- the number of ballsper row
-o the angle of contact
da the ball diameter,"inch
f - a factor dependig on oscillation and materialc
For normal bearing proportions fc - 1500.The life (90 percent probability of survival) at any other radial load or equi-
valent radial load (P) is related to the Specific Dynamic Capacity (C) as
follows:
L - (C/P)" millions of inner race revolutions (2)
It is normally assumed that speed affects life in a linear fashion; that is,
life varies inversely with speed. For a given operating speed of N rpm, the
number of revolutions which correspond to H hours of life is
L - 60 NH revolutions
Bared upon experimental data, equation (3) is too conservative at high speeds.
.4
I- ____________________________________I-

and
3 6H -C) x110I hour (3)
60 N
Catalog ratings are gene.ated in this fashion, usually for some given number of
hours of life with a 90 percent probability of survival. Five hundred hours is
a common catalog rating. Note that a rating at 33-1/3 rpm for 500 hours is the
Specific Dynamic Capacity.
Since this is available in the catalogs of most of the bearing companies, no
further explanation of this aspect is included in this report.
Bearing Centrifugal Loadina
In some instance@, it is desired to estimate the life of a ball bearing at
extremely high speed with little or no externally applied loadin3. In this case*
the fatigue life. is determined by the centrifugal loading of the balls on the
outer ring. (Ref. 4)
The outer ring capaci:y is given by
SA f2° 0.41 1' +7.39 d. 8 -1/3
7) A
where
A - material constant, usually 7140
f - outer race curvature factor (ratio curvature radius to balldiameter)
7 - ball diameter to pitch diameter ratio, d/E
d - ball diameter - inch,
Z - number of balls
R a pitch diameter - inch
The life of the outer ring is given as
3 6Co/Pf. * 901 life in 10 revs.
1~ 5I _ _ _ _ _ _ __ _ _ _ _ __ _ _ _ _ _

where
P .f. , centrifugal ball loading
Pc.f. 5.257 x 107 d3 UI 2 (1-7)2
Effects of Cyclic Loading on Bearing Life
As was previously shown, the fatigue life of a rolling element bearing is defined
in terns of a 90 pFrcant probability of survival. A specific dynamic capacity
C is defined as that radial load which will result in a life of 10 inner race
revolutions with 90 percent survival probability. The 90 percent life at any
other load P is related to the specific dynamic capacity as follows:
L - (C/P)3 106 Rev. (2)
When the load varies in a series of known steps, some equivalent or mean load
is defined as follows:
3 + 3 3 V" N1 + 2 N + n 1
where PV' p2 ' P are loads applied for N1, N2, Wn cycles.
For the case of vibratory loading, an integral form of Equation (6) can be used:
P. " fP3 dN (7)
In the general case, the loading will consist of som steady load Po and a
sinusoidal load Pl sin GA.11
The bearing loading P is given as
S~~P - Po + Pl sin at110 1PmP +(8
Using this in Equation (7) yields the following:
P (P + P smut) 3d(t)(
6

Expansion of Equation (9) gives
1P~ '(P. 3 + 31 2 P O *+3 i2o
3 3 1/3i + •l3 °/'"3c) d at.)] (O
1t+ P" 1 sino• 00 o 4€°8003 o10)
2 2pP P 3~ -t :3 P coo cot + ?
ci 4
.37 0l 1i •os~)) 1 /2
-3 P i 4 P 3 coo Wt + P13co 3 m /
1/3
2 1/3[P1'3 (1 + PC
2 1/3
_3l~( L (12)0 2 o
The results of Equation (12) are plotted in Figure 1 as a function of the cyclic
load ratio.
The life may be found from Equation (2) using the equivalent load
Often the steady state load i is known and the effect of various cyclic loads
is desired. The life due to the steady state load P Is
0 0
* (C ?0 1 13)
V 7
I
-'

1.36
1.34 - -
1.32 - --
1.30--
1.28
1.26 ---- -
1.24 -
1.22 - -
1.20
.'° 1.18
1.16 -
1.14 -
1.12 #
1.10 -
1.08 -
1.06- --
1.02 -
1.00-•0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1.0
? I /
Fig. B Equivalent Load Ratio as aFunction of Cyclic Load Ratio
8.
•.4...

While the life due to the equivalent load Pe is
L - (C/P)3 (14)
LThe ratio of the lives is
0 (C/Po)
The life ratio as a function of the equivalent load ratio is shown in Figure C. i
In summary, the resulLs apply to the following:
1. P1is Po
2. Radial Loading
3. P is unidirectional0
4. P Iis the single amplituda of the cyclic disturbance.
The above can be used with manufacturers' catalog data by roting that these areset up for some given life (usually 500 hours) at various speeds. The corresponding
load is tabulated.
The case where a cyclic load only is applied is sometimes encountered. The
bearing load is then
P P1 sin wt (16)
Equation (7) now becomes
,1/3. (P1 sint) d(wt)(17)
. 3 (-Cos Mt + - cos wt) 1/3
- 0.752 P1
I..
94f
_ _ _ _ _ _ _ _ _q I

1.0 -- ~
0.9-
0.6 8
0.7
0.6
0.5 -
0.4
0.31 - 1
1.0 1.1 1.2 1.3 1.4
p
Fig. C Bearing Lie Ratio AnA function of IquivalcatLoad Ratio
* -- ~~10 ~ '.:~

The ratio of equivalent loading to the single iaplitude of the cyclic loMang
is
, 0.752 16)11
Be~rin8 life is determined from Pa.
As was previously noted, Equation (12) and Figureal were derived'for radial
loading. However, the relations can be adapted for use with thrust loads, if
the thrust load is represented by
T-a +To + aT, (19)
where To is the steady thrust load and Tl is the single amplitude of the cyclic
thrust loadtng. This gives a similar relation to Equation (12) as follows:
S + 20)0T To
Figure B can be used to obtain either a man radial or thrust load. However, In
the case of thrust loading, bearing life must be calculated using an equivalent
radial load with the specific dynamic capacity. For calculation purposes
(preliminary engineering calculations) the equivalent radial load is given by:
""quiv. lad. Load - 0.37 P + 2T (21)
where P is the radial load and T is the thrust load. Either T or P, or both
are replaced by Pa and Tm where cyclic loading is involved. No*r accurate
relationships for the various hearing types are found in the manufacturerse
catalogs or the AFh3V standards.
11
t. 4
II III ,4*

Lubricant Life
In many instances, fatigue life is not the major consideration since the loading
is light. The lubricant is usually the limiting item insofar as life is concerned.
The first consideration is to be sure that lubricant and the lubrication system
are adequate for the speed range.
Unfortunately, there are no exact Suiderules that can be set. However, somae
generalization* are possible with respect to normal applications.
System Speed Limit D xl (bore in me z speed in RiPM)
Grease 250,000 (ribbon retainer)
Oil Level 300,000 (ribbon retainer) 01
Mist 700,000 (machined retainsr)
Jet Oil > 106 (mahined retainer)
Above 300,000 dN, the usual ribbon retainer would be replaced by a machined retainer
of metal or phenolic. For normal temperatures, the phenolic,'etainer is commonly
used. With special greases, retainer design, and light loading, grease lubri-
cation has been used to speeds of 750,000 dli.
With respect to grease lubrication, there is evidence that life is reduced in som
logarithmic fashion with increasing dN value. This is. similar to the effect of
temperature. Figure D shows a typical behavior of life with respect to tempera-
ture. A reasonable rule of thumb is that life is cut in half for each 10C
rise over 1006C.
12
- -I

100
00
103
------------ z:~ I-i-
- ~ I _ _I_ _

III
Description and Discussion of Charts
There are basically three separate sets of design charts included in this report,
name ly:
a. Pure ladial Loaded Bearings (Deep Groove) Contact Angle 0o M 0"
b,, Pure Thrust Loaded Bearings (Deep Groove) Contact Angle Jo W 100
C. Angular Contact Bearings with Axial Preload and Applied Radial
Load 50 "25°, 150
Table I describes the dimensions and symbols used for the deep-grooved ball
bearings. Table IlI contains inforuation pertaining to the angular contact
bearings.
The first set of four charts contains graphs of radial stiffness versus radial
load. Load levels are indicated on the curves. The effects of bearing size and
race curvatures are illustrated.by these four charts. In geatral, a bearing with
tighter raceway curvatures is a stiffar bearing. For example, a bearing with
curvatures of f n .51b, fo .530 is stiffer than the sam bearing operating
with curvatures of f, a f 0 .570, for the sme radial load. Radial stiffness
is higner for a bearing with a larger bore diameter and/or a greater number of
balls. Note, for pure radial load, the linear relationship between log 91
and log P.
The second set of eight charts contains graphs of axial stiffness and axial
deflection versus axial thrust applied load. Load levels are tabulated ir
Table III for these particular bearings undergoing a pure thrust load since
cross plots of C/P will add confusion when reading the curves. Deflection
curves are included to aid in analyzing a double acting thrust bearing set.
The deflection curve for a double acting thrust bearing set is constructed
from the deflection curve of a single bearing by adding increments of deflection
to one bearing and subtracting from the other. The corresponding load
differences equal the externally applied load. A similar observation,as given
14

above for radially loaded bseringa, can be made for the thrust loadel bhawing,
a bearing operating with curvatures of f * .516, fo - .530 is stiffer than thaf
same bearing operating with curvatures of fi a f1. .570, for the sm axial
load. For all practical purposes, however, an average curve may be drawn for
axial Pciffness versus axial Toat for all bearing sizes. In particular, the
bearing with the similer bore and loes balls is less stiff at light loads and
more stiff at heavy load* as compared to the larger bore bearing. There is an
approximate linear rAlationship between log 3A and log T.A
The third set ..of (24) charts contain graphs of radial stiffness versus radial
load. Loa4 levels are indicated on the curves. The effects of bearing size,
race curOatures, initial contact angle, and- axial preload are Illururated by
these" 24 charts. For the sam radial load and axial preload, a bearing operatt
with curvatures of f, a .516, fo a .530 is stiffer than the same bearing operat
with'curvatures of f, a fo - .570. The radial stiffness level is higher for a,
00bearing with a larger bore diameter •and/or a greater number of thalis, and thc
smaller initial contact angle. (1o - 150). In general, the radial stiffness-0
radial load curve for an angular contact bearing is composed of three different
behaving regions. One region' shows the stiffness to be constant with varying
radial load. (This is the light radial load region.) The middle, or moderate
radial load region shows a minimum value for radial stiffness. The heavily
radial loaded region shows a linear relationship between log SL and log P. Th'
third region is similar in behavior to that of the characteristics of a pure r4
loaded deep grooved bearing. The basic cause for this curve hav'-,g three sepal
regions is due to the axial preload. In region one, the axial preloa4 has a
great effect in holding the radial stiffness constant. In region two, where td
applied radial load becomes equal in magnitude to the axial preload, the radial
stiffness tends to decrease with increasing applied radial load to a minimum
value. In the third region, the axial preload has little or no effect, and bh
angular contact bearing reflects the behavior of a pure radially loaded bearii
i.e., a linear log S1 versus log P relationship.
Thus another point one is led to observe is the role of axial preload magnitud
on the three regions of a tyical stiffness versus load curve. Three differaei
preloads are represented in these charts and are tabulated in Table I1. These
I- 15
PJ

preloads are given the umes selected lisht, moderate, ad p'ef~ered heavy. The
effect of increased preload is to increase the region am teod ra sad decrease
region three load range. Thus, the ultimate is a eotant radial stiffness with
varying radial load obtained with an infinite preload. the increased preload
also has the effect of increasing the level of stiffness in regions one and two.
However, it should be noted particularly that the level of stiffness in region
three, for the sam radial load, is the sme for all preload values. This, as
mentioned above, is because the axial preload effect is relieved entirely
above a certain (radial loadOxial preload) ratio. (Approxlmately ViT - 3 for
0 0ISO a 25o and 1/T - 4 for 10o M 15°.
In general, the light and extra light deep grooved bell bearings examined here
will have a radial stiffness ranging from 105 to 2 x 106 for redial loads of
fru 10 to 2,000 lbs. The angular contact bearings will have radial stiffness5 6values from 2 x 10 to 2 x 10 for radial loads of froo 10 to 2,000 lbs. The
deep grooved ball bearings will have an axial stiffness per bearing of from4 6 42 x 10 to 4 x 10 for thrust loads of from 10 to 10 lbe. As in the case of the
preloaded radial bearing, preloading will increase these values of axial stiffness.
16
~~~~~* . . . • • " • • - . .' ? •

0J
%4I in6mn I A % in b Mwl w inj in In Nb% I W% W o
.o ~ o o~~ . . . . . . . . . . o .@
. .% . .% . .% . . . . .4 . .4 5 . % - P -
~~~r u0 en I n A u n in an 40 v4i i n n
'A0 4 c n0 o0 w4u M A i 0 % O~~ 0
o -u
90 a
*1*4
J.J U"' IA IA IA
'0 5 C4 O N Nl % 4 c foD wl %n -. ' .- 4 0 00' D cc40 in in- ~ E ~ 4 - N C4 n v 44 i
.i .,• . . . . . . . .• . .
OR
i n % On a n i i n i n 4C4 (4 0A ccI 4 N N ~ P
14N VI wlO4~ I' 'VI66 inONN L% 9~~~~c WN P.4 6- .4 n im 4 .6 , in i n
0 ~ ~ ~ i ini n ~I
~n-4at-0
00
17

go go
rdP . . . *
0 In In 4J 1 In ;4 :4 :4 InC4 C4 C4C
v4 C4 N
"a4 ID C4 %D# P. 'in In C4 P% Ai m
e) "4 ,- 14 Ci4 ~ 4 # i in
""40.0 4u in at at vi v
"4~C* C4Mi Mi
P- o- #4C 4C4 4C4 0 -4 Of 64 C- V qC'0 an W P..loani-No 004 'It 'Pa 0U MiU 0w ai lk
" " C4 in #4" # 4
in t
~~~ -4 -----------------El UC 606 3~A

*i
Table III Azial Loaded Dep-GQrood kerings
Table of approximate load values corresponding to CLP - S and C/IP? 10 load level4
Bearing Symbol Load (Lb)
S-c/ - 5 C/P " 1o
Al 290 100
B1 600 250
Cl 1100 450
DI 2250 950
11 3650 1500
A2 70 30
B2 175 75
C2 300 100
D2 550 250
R2 950 350
WAl 380 155
111 800 300
CCl 1550 650
DD1 3000 1250
331 5050 2100
AA2 95 50
BB2 200 100
CC2 400 200
DD2 1500 350
312 2550 700
19
I _ _ _ __ _ _ _ _ _

)
PURE RADIAL LOAD
20
It l i " i i ii I I

- - - . - - - - - - a - qI�
- - - - - - - - -
- - -- - - - - -
- -- - - -
- - - - - --- a -
-- \7I *------- p
-- S -- - - - - a
\J. V- - - - - -- a
El:
j------- �. -- I
.0
____ A- - - S - - - - j -* I.
Sw. 0
U
- - - - - - - -, - A- - -__-- - - -__S
______ U a 12A.4
U -
o
U mm-- -- -- .4- p4-- N urn
U
- - - - - - b
.� a - - - - -* '
o 0- p4
21

I- - - - - �
I ----- I
- - - - - - - - I
- - - I __I
Si
- - - - - - - - -- 2- - - - I - - ____
_ -J --- U_ ii
Cl Cd C'4C4 U
- ___ ___ U.w.
IC4
___ b..54
________________ USi
____ - - .3
______ - - .3
o a
- **(i�S�e. S 9 U J(u1/q�) uu.uj�g gwpw�
22
S
J.'.
* -,*�. �* ., . .
I. .� - �*.

PA 0
"a
"d~ 66
- - - - - - -
-I - -23

'44
VAI __V
A1,4- - -N
(ul/ql_ _ soIPzgIwpv
24__ 0"

I
PUll THRUST LOAD
25
.4 �.
I

101_ ... .... . .. --- •- -
o - -.. ..- - . - - I t_ .
,44
-10 .!5 B I -ICI Dg D1
All
I 4
-
I"o
No Radial Load
'26

*2
,% I
BI. ____ 0
-0 -3 -A
D!!
10-4
Load (lb)
Fig. 6 Axial Deflection versus Axial Load
No Radial Load
27

1*
_ _HI
106
'.0 12 --AA
lob
10 5
R28
D2 ~II
1 ~C2•B2--
4 2
104 10 1 a 4 a • '1 2 a 4 a 0 T s o • 1,0 3t 4,
Load (lb)
Fig. 7 Axial Stiffnessewrsus Axial Load
No Rtadial Load
28

-0 -2
00
10 C
Load (lb)
Fig. 8 Axial Deflection versus Axial LoadNo Radial Load
29

106
105
V AA
10 10
10 102 10
Load (lb)
Fig. 9 Axial Stiffness versus Axial LoadNo Radial Load
30
,j*#v,

"-40
100
1ig 10 hxa Dflcio vrusAxa La
1031

-=2
106 /
-Am
qb
U
10 5--- -9200S
SBB2-CC2T-=
Fig. 11 AilSifea essAilLa
3 210 1 102 10 3
, Load (lb)
SFig. 11 Axial S~tffness versus Axial loadNo Radial Load
32

( -
r -
22
£
I. I I
/ 4
10 ----
100
II
I i
0-3 , •0
10 1 a 4 9 6 7 a j.0 2 a a 4 0 0 7 el0 3 4
Load (lb)
Fig. 12 Axial Deflection versus Axial LoadNo Radial Load
33

I
I
RADIAL LOAD WITH AXIAL IWAD
34
" !1

I I
I ~~ rt i
'S4
-41
46 in
(uT/l) sauj;2S l~pa
35_

04
1
C4. x
00' bs
vi
___ql _____T2 1*pU
36-

-4A
4.w 1 p a
4Ilql ssuU~gllwit - 37

- I"
on
C a
-~~~~ai a
ot
(aT/ql) soaau:TTS loTpoll
38
- -~

____ '9
I.14
1V[�F �Vt� I,
iI.a__________ - � --.----.--------.--- 9
________ ________ S
_ -4 __ _____
-� �-. I --
I -
\II I J-K ___ f - I _________
0 4
7 - L � .0
-- - L.. _____--I.-.- -. -- - --------- i-----�-----O.-- * '� I
U
4-----K - -- -- I Uw.-4
-- �.4- � �, * 'U I
- I*aO I�,.IEaa
I - 44'4
I 4I .- I �- 04 S
I -I' C.)
I
-------1�- - -.- I- ("4 p
- 0
4 I-- - - Ii -
_ _ - IK I .2i�-47�.. K-"---- 44 K' 4
U V '4

I_ N
0 0 "a
-7--- 40
ok
-u / l -e u j I -.~p: A
40 -&.p

- - , - h * - - - - a * -
_ _____ - - - - - - - _____ -
------ 3- . -�- -.
.4 ___ - - - - -* - - -4.
As
-- *-iljj--t I
I.,
-. 4
U*6.4
U**I
.4 .4 JU
______________________ .4 4
-- -- S 3Jq3
N0
- .--- .4
- - T - - --- 5.
S I- - - .� - - - -
S U 1.0 9'0 us�o o.4 .4
41
- ..- - -

r4
_ I _"_
UU
______ ___V'
10._ _ _ _
0~ I~4
CA C4*o
424

-X-2
'44
0 C1
- aJ
434

__ __ 0
40
*P4
(uT/l) 9au;J~s ITSF
_ 44

V4 I
CC
A: .4
455

N il I
C..
46~

10 9
00-
U4 x
(u/l asuaI -4 OAg
47.

- - - -- I-.-I----1- 1 0
_________ S
� -� -b 'S
_____-U
aSi be
S
___- I:-- ______ -4 U
__ 0-- ___ ___ --- _____ aDa
____ �DUSi S-
A �aJo . - �.a- ,.1
U
-- - 0Ube 9 6 beU � .3 �
- mu* * me*.4 *�4.� �.* �MI*" 'a'
.,4 I
aD 0
*3
N0 '0
-- ___ ---- - *Si-1 - N- - - - - - - - - U
- - - - - - - - i----- b be
- S
0
-4
L 9
U
* .iLii.L-i ....j_____- - - U
o 0-4(uJ/q�) u.;u;;pS 1� j;prU
48
___ 9)

x V
~~OF
- -. 4 -

0
N ___ __ ___ -
bi N - - -. - - -
-h ___
K------__ __
- Kzy 77�
F U-4
-
UIi
___ -- - -- -I:U'IU'a
.4 0
-4------- --- -�--1.. U
*- -- ___ -4 Ii
6-4 -4
-�-4 -
-�--.-- p1 6
__ ___ ____ -4�0 p1
�4 U
II __ ____ - - ___ .1J�h9 .2 'aU 65
1 @4
I o as
I U '4�
I �
aU .4I-.. - --t 'a C
-4,.
.us___ _____
__
___ ____ - -� __ 0 �
-____
-
U
--4
___ Lfl: -
_____ a
0� - 0
_____
- S he
-- ___ _____ __ __�i:
S a
*0 0
-40
(u�/q�) isau;;ps TUIPrE -,
50
- ---. 4
� m- - � -� -.

41-
cc ...4
14 a
0 c-4,
cc 44
00
-- 4
V 4ad-4(
ii C~4 ON
--- 4--- ssau___ -- - 0
-4 I--_ _ -- -- __ _ - ~-51

C4,
I! --
14a ii
-,4
0 (0
N CC4 -4
V v4
_ _ _ _ a-4.
'IoC
___/q ___m I - 0 cV- ____52

044
~u -0--
00)044
14
-44I.,4
*CG
- - -\ -- ~.--~ '-4'.4
-u7ql -------4-----l- -*pl
- - - 53

I -40
A..
C14 10
I 4'J
4 0 C4
II IN
544

-i Aj 04" 0c-44
040
\ 0r. Q
_ _ -o w_ -4 ii
U,'Id
'IV
C- - ___ '.
Iki _ _-. 4 p 0_________~~~~ V___ I, '________
ii- (uT/qr) hbauul:s vwd

C6
gtoo
1an I 4
40
-A " I - - 0 w
0 Ij.3 ~ 44Cl
U C4
y -4 ~ toI - ~ 4JJA. 0
I -% - >
(ulql esaaa~l lu -
56 ~ d~

44
___ _IV__ 04_. 4z z
____ ____ - - - - - - - -
LiiIn
(uBql I-----T2 - UP
- - *1----57

00
IIOU
0*
4 - - Ic-4- --
qNc w"
22 k
a.cI I 1I5-
-~ ~~~~~ to .- - - - . -
_ - I
I 6-4seui I i - .0o
-- ~ -58

IV
SAMPLE PROBLEMS TO ILLUSTRATE USE OF DESIGN CHARTS
Four particular examples are included in this section:
1. Pure Radial Loaded Bearing
2. Unidirectional Thrust Loaded Bearing
3. Double-Acting Thrust Loaded Bearing
4. Radial Loaded, Axial Preloaded Angular Contact Bearing
1. Pure Radial Loaded Bearing
What are the radial stiffness values corresponding to radial loads of 100 and
700 pounds for a deep-grooved ball bearing with a BORE - .5906 inch and
f, M f - .570?
From Table 1, this bearing corresponds to A2.
From Figure 2:
Radial Load (lb) Radial Stiffness (lb/in)
100 2.88 x 105
700 5.55 x 105
2. Unidirectional ThrusL Loaded Bearing
What are the axial stiffness values corresponding to axial loads of 100 and 700
pounds for the same deep-grooved bali bearing as used in sample problem 1, above?
From Figure 7:
Thrust Load (lb) Thrust Stiffness (lb/in)
100 9.10 x. 10 4
700 3.22 x 105
3. Double-Acting Thrust Loaded Bearing
What is the axial stiffness fnr a double-acting, deep-grooved ball bearing,
thrust bearing set, preloaded to 200 pou.,dsi The bearings are type A-2.
From Figure 8: Read off loads corresponding to equal deflections around
preload of 200 pounds.
59

Inus,
Load (lb) Deflection (in)160 2.8 x 10-3
"200 3.1 x 10-3
240 :.4 x 10-3
The axial stiffness is S LL 240 - 160.3 x 10-3
SA = 267,000 Lb/in
This problem may also be solved using Figure 7 in conjunction with Figure 8.
Thus,
Load (ib) Deflection (in) Stiffness (lb/in)
160 2.8 x 10.3 1.22 x 105
200 3.1 x 19-3 1.4 x 105
240 3.4 x 10-3 1.58 x 105
SA M ES - (1.58 + 1.22) x 105 = 2.8 x 105 lb/in
or S = 2 x 1.4 x 105 . 2.8 x 105 lb/inA
For light loads, i.e., loads less than the axial preload, the load-deflection
characteristics are essentially linear.
4. Radial Loaded, Axial Preloaded Angular Contact Bearing
What are the radial stiffness values corresponding to radial loads of 100 and
700 pounds for an angular contact bearing with a BORE - .5906 inch and
fi M fo M .570. The contacL angle is 15 degrees, and it has a medium axial
preload.
From Table 2, this bearing corresponds to PA2.
60

From Figure 30,
Radial Load (Ib) Radial Stiffness (lb/in)
100 4.45 x 105
700 5.90 x 105
Note: One must be careful in using the charts, in particular for the angularcontact bearing, that the design contact angle and axial preloadingdesign value correspond to the values given in the Fijure legend.
61
4

V
REFERENCES
1. New Departure Engineering Data, Analysis of Stresses and Deflections, Vol. 1,
2, 1946, New Departure, Division of General Motors Corporation, Bristol,
Connecticut.
2. SKF General Catalog, No. 425, 1958, SKF Industries, Inc., Philadelphia,
Pennsylvania.
3. New Departure Handbook - Ball Bearing Catalog, Twenty-third Edition, April
1955, New Departure, Division of G4C, Bristol, Connecticut.
4. Jones, A. B., "hMe Life of High-Speed Ball Bearings", Transactions of the
ASME, July 1952, pp. 695-703.
6
62

VI
APPENDIX
A. Analysis
The theory used for predicting the load carrying capacity, deflections, and
stresses of deep-grooved. and angular contact bearings is that of Refererece l.*
The equations relating load and deflection were differentiated to obtain the
equation for stiffnesas.
A calculational procedure was devised for predicting the maximu ball load,
deflection, stiffness, and inner and outer race stresses, as a function of total
applied load, preload and bearing geometry. This procedure was programmed as
computer program PN0182, IBM 1620-60K.
Three separate cases are treated:
1) Pure Radial Load, deep grooved bearing (Ref. 2,3)
2) Pure Thrust Load, deep grooved bearing
3) Combined Radial Load with Axial Preload, angular contact bearing(Ref. 2,3)
Pure Radial Load
Maximum Ball Load. P0
P - 4.37 * P/n A-10
Radial Deflection, 5N
b - p2/ 3 A-2N 0 o"
where
Co 7.8107 x 10" 6 (0e° + C5)/d 1/3 A-3
and
7 C-o' CB" f(fit fo a, d, ,o) A-4
t *
Sea Referencer.Section
63L ____________________________ ______

Pidial Stiffness, SR
SR - 3/2 P/5N A-5
Compressive Stresses, S0 , St
1507 ) 0 1/3 A-6
Sm 0 fsm(15079)
where f sm f(fip fo, K, d, Ao) A-7
and m- i, or o.
Pure Thrust Load
Maximum Ball Load, P0
P a T A-80 n sinJ3
Axial Deflection, 8H
5 - Bd * A-9H coso
where
B -fi + f 1 A-lO
and01 is found by an iteration scheme, written below.
Applied Thrust (Axial) Load, T
T - nd 2K • sin 81 cos 1 3/2 A-11
where B x 1/2
K - 7"8107(CBo + cBi A-12
and
is found as follows:
64
I

Define the following quantities:
T b Cos o a Cos f5 x2 K 01nd. K
Then Equation (A-11) may be written as
G 2 1/3 a(1x- (--) -b
aL t A-13x
Then y - b(l - x 2 ) 1/3 A-14
It is a known fact that b << 1. Therefore, as a goo4 guass to start the iteration
scheme for solving (A-14), let
y by, + by22 + A-15
where 2
and =222 2 A-16
The procedure is:
1) Calculate yl, Y2 from (A-16) and y from (A-15), knowing a and b.
2) Calculate x from (a-13) knowing y.
3) Calculate y from (A-14).
4) Check y from step (3) with y from step (2).
5) If the values are equal
A M coso (x),
otherwise use an average value for y and repeat steps (2) through (5)
until agreement is obtained.
65
S ___"__ __

Axial Stiffness, I SA 1/ s3 p o 33 2"S B 2 si n1 1 + co 32 A-17
A and BK 2 1ll[coo~ -3os co
Compressive Stresses, So, S
Sm m (15079) 1/3A-6
where
f -m f(fil fo0 j, d. 01) A-7
m i, or o
andP is calculated from (A-8)o
Combined Radial Load and Axial Preload
The same procedure for finding 01 as applied in the pure thrust load case is
applied in this case in order to find 5H' A value of radial deflection 8v,
is assumed then the radial force, EV, is calculated as a function of 8H and
bV
The following definitions are written:
k' !V- h' -- andBd Bd
-1 [ - (sin 0' + h') Ccos0 A-18
* - cos , coo V'> -1
a - • X coo*'< -
Maximum Ball Load, P0
P 0 Kd [ sin 0+ h')* + (c6s 0' + k' co, ) 1) 3/2 A-19
where 0 =0
66

Radial Deflection, 5V; Axial Deflection, 5H
5V k'Bd 8 h' Bd A-20
Axial Preload, T
Calculate from (A-ll) and (A-12).
Radial Load, EV
lV ,nd 2 K fo Ad$
where 2 - -2r '(coo "sin" + h') 2 + (cos •' + K' cos oos2 + k' 1os1) cos
A- [(sin 0. + h') 2 + (coo 10 + k' cos 1)2
and -0•e * A-21
Radial Stiffness, SR
S B ._ fo A cooR ndk K' x cos 0'+ kcos*)
[(sin D + h')2 + (Cos 90 + k' coo *)2J 1/2+I+(coa' + k' co , ) + ho. +h')2. ,• :+ ° . -1o.. j:• sin(.,; h,)2 (cOup+ok oo.q 1 1/+
A-22
Compressive Stresses, Sot Si
1/3
Sm- fam(15079) A-6
67
+ ..... .... .....++7 7.. ...

A
where
fe $ f(fil fo0 E, d, 1) A-7
m - I, or o, and P is calculated from (A-19).
B. Computer Program
A Fortran II computer progrim listing is included in this mmorandum.
The Input Format wr.tten below should be followed when using this program, PHO182
IBM 1620-60K.
Input Format
Card I Identification Card
Anything may be punched in columns 2-72.
Card 2 (6 FlO. 6, 314)
Item
1. BORE, Bore diameter, in.
2. OD, Extreme outer diameter, in.
3. DB, Ball diameter, in.
4. FI, Radius of Curvature of Inner Race
5. F0, Radius of Curvature of Outer .ace
6. BETA, Contact Angle, deg (f - 00 for pure radial load)
7. N, Total number of balls
8. IND, An indicator used to specify either one of three differenttypes of calculations.
IND: 0 Pure Radial Load
IND: 1 Pure Thrust Load
IND: >2 Combined Radial Load - Axial Preload
9. LC, An indicator used to stop calculation procedure
LC: 0 Program returns to Card 1 for more input.
LC: 1 Program stops after computation is completed
68 *
t!
• I

Card 3 (3F10.6, 15)
IND = 0
Item
1. RI, Initial Radial Load, lb.
2. RD, Radial Load Increment, lb
3. RF, Final Radial Load, lb. (Not used in calculation. . - 0.0)
4. M, Total number of radial loads
IND I .
Iterm
1. TI, Initial Thrust Load, lb
2. TD. Thrust Load Increments, lb
3. CONV, A radius of convergence used in the iteration process for cal-culating 01. COIV - .0005 is a typical value.
4. M, Total number of thrust loads
IND> 2
Itern
1. TI, Axial Preload, lb2. TD, Axial Preload Increment, lb (Not used in calculation 7 , 0.0)
3. CONV, a radius of convergence used in the iteration process forcalculating 01.
4. M, Total number of preloads (must be seL equal to one; i.e. M - 1)
Note: The total number of radial loads which will be calculated as afunction of axial preload and radial deflection is equal to thevalue of IND. Thus, IND - 20, the ctlculational procedure willsolve for '20' consecutive radial loads. A maximuA of IND - 24is allowed.
Output Format
The output is self explanatory. All linear dimensions are in inches. All loads
are in pounds. The stiffness units are in lb/in. The stresses are measured in
psi.
69

c BALL EAU fF 1S4t ?S CALCULATICJN ROJTT.14E FOR'C PURE RADIAL9PURE THRUST,(UR CO'lHINECD LOAL)ING INCLLUINro CE,*TRIFUGAL_C PNW,182 3JUNEt64) Stitl AND PO(AoJ)L FOR AJ
0 1 MNS I UN FF(1T74T -C12 - -. -(1-tS(2)DS1
0 12). *
-FF(13)8506
FF14)=.520FF15') .)3
__ FF16)x.54ý;FF(7)x.55ý;
FF111) z.59U____ FF(1 2)x.6)U
-__ B1,) Z.816____bb(2)x.92d
Bo ('5j - 1.oj7Bbi 4)x1 .092
Bbb18) 1.385
OHI 1018l.465bb ( I ) 1 .4981bul 12)x1.525
-- C 21 a i 7d'ý5
CC 14)=1.05
__ __ CC (6 .1.22
CCI 8)=1. 321-__
CCi ,)u1.395CCI 11) * .425CCI 12)xl .45 _
DDO 1)a.85JODD(2)a.968DD(3)=1*085
DDO() p1.260DV(6)xI .341 _
001 7)s3 .413DDl8)al.46L -
W)~ I I (I I aI -%S
D0111) ul*585001 12)a*162 ___
85(1)3.85BS(Z)a.948513 )1.0385(1 4)1.075B5(5)zl1.17BS(6)1&124______8517) .1.30
70

BS(8)sl*35H-1; y I aI &4a
8s(10). 1.44BS( 11Jul.4785(12)81.51CS( 1 -.70CS(2)s.78CS( 31 me86CS(41.o90C515)=u.98CS(6rs.04CSI 7=1.09
CS( 9)o=1. 1
C54 111.1.25
DS(l1)*1.l _____
054 2)slo25
DS(4)u1.l45
DS(51&1.58DS(61.1.65
DS(9)ul.65
OSI 111.1.95DS( 1212.30o
6 READ 100#(REXD 107 BREO)C6T.O~EANIDLPUNCH 111
PUNCH 103PUNCH 1949 dQL9QU).,VrT939SETA~tf'IF (IND-li 1.2.3
1 KtAV 107r.RTvRD9,RF`*M-. PUNCH 106
2 READ 1019 TI*TU*CONV.I4
GO TO 4' IWEAU 1(I071.1o.LAICUP7-11
I(OP=KOP.1IF (KOP-1) 15.15.4
18 AK1(1)n.002AKI(Z)=UQ03
AKI(41a.0o ----.
AK1(S)=.006
AKI (7)=.008
AK1(9)..010
AKI I Ano~l
AKiI 131s.Q1dAKI 114)=oUZVLAK1( 15) *.022
71
161

AK1 ( 18d) L d
AK1 (2ý,As.)35AKI (21) :,j4.AKi (22) .2,
GO TO 4.C P~ktLir.Iw*AHY CALCLJLAMh,,,S
4BETs:90174533#3E:TA
ANxN
(COSbCO!,e (rAET)
CALL TLv fFl ,b9Fr9&h,1*2)CALL TLJ (FI,1.,,Fri .L:.1k)
CALL TLU (F~joviFFsot,91ý')CALL TL'J (rO,'lC9FI-CC,12)CLX.'x-(tv-C )*Z*2.v+6CALL TLI' (FZ)9F,FrFqL-c,,?)
CALL TLU rFQ.CsZoFkoý'912
CALL TLU (rlZu,9FPO-,:'91"CALL TLU (F sLs-o ,l
LiuL).j**J. 433 3333
IF (IND-1) 8.9998 R-kj-RD
R=R+k LP~U4, 3 7*t/AtliP03wP0**.U*333333DNzC*P03*PO3
DRDDN-I1.5*rH/f'6
5 P UN CH I R 9 Po 9 0N OR JL It 51.
--- __20 IP (LC) 6.69159 bz IF -.
____ AVx(b/(CA.J+CDI)/7o81CfL-C6)*3
_AKz SQR TF(IAK.Ar~zAK*DTxT I-T0.
-- AýCL.Sb -
Y11l.Q;A*A/3.0
Y~-.66-667?*A*A*Y1
__ -Do 1,' 18104iTsT+TD
Yxa2ty1+u2*62*y2
72

ETA*ABSF(Y)-AbSFIYY)
--TrTrTWTF TI I1-r* 12
1 1 1UaSTANVC)XS/X)
DH~ml*O/X*SINF(BETI-dETlDk-WB*Ub*DHIZ&DB/E~*X
*-F SG-bl- (Z-CZ) 2*2.0ZFS.I&Zt5-(Zd-ZDI'Ze.U*Z
-DTuA/X-1*O
DTSaSCJRTF (DT)DT6-f__i_5* i.S*XS*XS.0)T*X'X*X/A IIFIIND-1) 16.16911
P03aPU**0.33 3333__ 4FuPFUQ5()'HC0N -
SM(;aFSU*SMI
10 PUNCH 1ý'St T9PO9VH90TDLHSMI9S14
17 Slo(SINb+0H1**42
PUNCH -106'
DO 19 Is1,IND
PHC=(SORTF( 1.0-Sl)-COSU)/9FK
- F(PHCA-1.03 40J.41.4141 PHIs3*1415'fl7
GO TO 3140 PHS*SURTF( 1.C PtIC*PHC3___PH! UATANF(CPHS/PhC 3
Trf014C3 39~3163130'PHI=3.1415927+PHI_
PHID=PHI*57. 29578'5.-DPHISUM~U.0
-- 0 32 J1.*31
CPzCOSF (X)
IF (J -1) 35035933'-- YxO.*5
GO TO 34
34 P=S1+SZ**2
IF (P-1.03 53953954S- 3 Pm41u1.i~E-O6
GO TO 5554 MSRFP1j
55 PM2=PK,**3
73
-.--- l L

SSTnPM2*S2*CP/P -- ~SUM. SUM. SST*YX
S3mCP/ 52
IF(SENSE S#iTCH 21 2352 PUNCM I015953*ST*P9P.4I9SST.5232 SUP4-i5UMS+ bT*b6ST'VX
SUMO(SU?4-Q.!3*SSr .o*PHI./3.14159aeSUMSa ISUMiS-( * 5*SST*ST l*DPHI /3.141 592?IF (SENSE SWITCH 21 5C951
50 PUNCH 1059 SUM9SUMS9PHIbIFK51 PonSQRTFISl+(COS8+FK)O'Z,
-PO=PU**3*AK/AN-
SIMI uP(J3*HCONSMOEFS0*SMISMI*FSI*SMIR ýS-UM A kDRDDN=SUMS*AK/B/DB0NaFK*B*D
19 PUNCH 1'J5,R.POUNoDRD~i)4jS;ItSMlOGO TO 20
15 STOPC FORMAT STATEMENTS
100 FORMAT(72HO
1QZ FORMAT(6F10.69314)1U4 FORMAT (6F10.5ofi)Iw3 FORMAT (7ZrIO oORE (Jol~e bALL UIA* Fil) FIwi COP4T*A
INGTh-N5.o'U~lALLS) I
i~rTTirT.~A.LAL (ALL LCAJ DEFLECTION4 STIFFESS, I*R*STIRESS O.R.STRESS)
1Q7 FORMAT(3FiOd.W9'15)Iv.8 FORMAT472HOTHRUST LOAD BALL LOAD DEFLECTION STIFFNESS I*R*ST
I R E7~. T ARE t 5S)109-FORMAT(62HOTHR.US.T LOAJ T/NODK AXIAL VEIL* ml/lD AXIAL
1ST 1FF.)110 FORMAT(2Fl0e6915)III FORMAT(IHI)
END
74

SUBROUTIN4E TLU IAII5.C.LNjc A NEPENDENT VARTZBEE
C C INOUPENDENT TA8LEc L UL)LIENVET 1Ab' -
C N4 144 OF ENTRtIES IN4 TAOLE
NT 128
NTXIut4
13 IF IM-11-39.39942
GO TO 9942 FT T1TMCd1ej) 45943.44
43 1-1.1GO TO42
44 IF I(dM1-Al ý%,798
7 AwDI /GO TO 99
6 IF (M-NTXZ-1)9*1i.,.1515 RTXI.M
MaM-(M-NTX2) /2
9 NTXI* M6O TOT
8 NTX2=M14 M=INTXI-MIZ*
IF INTX2-NTXIe1I13*1bl.1$
10 DENOu C(.A)-C(IN-1)D IF F. a AHo DIFFDENO*(UtlU4-O:-1u)+QuM
99 RETURN_______END
i7

C. NOenclatur fotr Analyeio
Symbol Definition Units
B Total Curvature, sq. A-10
C° Radial Deflection Constant, Eq. A-3
Deflection Constant of Outer Race, Eq. A-4
ca i Deflection Constant of Inner Race, sq. A-4
d Ball Diameter in.
a Pitch Circle Diameter in.
fi Inner Race Curvature
f Outer Race Curvature0
f Stress Factor for Inner Race, Sq. A-7
f s Stress Factor for Outer Race, Eq. A-7
h' Relative Displacement of Races in Axial Directionsq. A-18 in.
K Axial Deflection Constant, Eq. A-12
k' Relative Displacement of Races in Radial DirectionEq. A-18 in.
n Number of Balls
P Maximum Ball Load lb.0
p Magnitude of Radial Load for Deep Grooved Bearing lb.
SA Stiffness/Bearing in Axial Direction Due to Load lb./in.in Axial Direction
SR Stiffness in Radial Direction lb./in.
S Compressive Stress in Inner Race psi
S Compressive Stress in Outer Race psi
T Axial Load, or Preload lb.
15 Initial Contact Angle des.
Contact Angle after Preload deg.
Operating Contact Angle deg.
Deflection in Axial Direction in.
BK Deflection in Radial Direction in.
6v Deflection in Vertical or Radial Direction in.
EV Magnitude of Radial Load for Angular Contact kg. in.
Angle Measured to a Load Vectoriwithin Loaded Zone deg.of Ball
Half Angular Extent of Loaded Zone of Ball des.(O ,IC' a )
76
*-Jk,~ *. -

Secriy Casifiaton OCUMENT CONTROL DATA -IUD0....wi .ftMomfooi *1 off". how of o~fte"An "dNimn Amme"Wn4 OWN I6 E onea ohm i go o nwA
I ,RMIATIN 0 ACVIVI-V (Ce.pstle. autf.) As. REORT. sOKtjelyy a LAPIIgATION
S. AUTM@(3) (Lose1 maa lNat amo. Andfel
Levi., fid and, Mol w.1kig 8tsu1.y Be
S. REPORT DATE 70. YTOTAL 7m. *V PAgS9 M it. ow mapsfty 1965 15
Ga. COtNTIACT Oil 0MAN? MO.A? 33(615)-1895 9& @Uu01HAT0ft*0 RPOSIT I6UIAO9W)
.T~k No* 304402 S&. T" PONT KOM (A o mbe n~umbes.. o bep Osea.01
tO.AVALAILILIMTAIO0 WOICV QL~fedrequesters iny obtain ooples of~ the epowrftm WC o pammoimoamnt addissemination of this report bW DC Is wetauthori sod, Rlaeto foreig nain al Is not authorised roleas..toN
we frFederal Scientiflo and Technical Informot.iomnfomswry0IAIt UP OT9S Ua. SPONSommo MULTANT ACTvIVTy
IS. ANSYNACT
The contractor shall type In the sae Wahtrect ag
-bat used In the front of the reports
DD I~ JNG1473 _ _ _ _ _ _ _
Secuafty Clasafficadgm

Security Classificationt14 Rev won L AKS LUlmC
'AabriocationDan bearings
Rolling zli -- tRotor-bearing djrninic
INSTRUCTIONSL. ORIGINATING ACTrVIY: Eate the nom* and adrs Iposed by aemmly elsassil~tle maing lam~ mouMeieof the contrctor. subcontractor, prot*@. Depastuest of Do. much auteas" activity or ether orgamifatiom (co"Wnab esther) lesming (1) 1161fe reqaetere My shea coepies of twothe tpt report. w bmr CDC-"2&. REPORT $ECUN9TY CLAUIRFCATION: Eate the evow (2) "FeratW amseenmemest sod dlaasnilastled .6 t0aall security classification of the report indicate whether sab O so sbrs"Rtestricted Dot*" to incided Nothing is to be inm ccer&rps yDCi estete.
AACS ~ ~ ~ ~ ~ ~ ~ ~ ~ 1 WtOn 0 to89ft eI606(3 "U. &Geveremieat g@acie 6646ai PLee ofLace ~ ~ ~ ~ ~ ~ ~ ti witht appkprat twowh r=ultlam direed AenDD.c2b. GROUtJP Autoerntle dowagredi.6 Is specified in DeC DOf- soo s requeSo thmagh
rective 5S 2010 mad Armed Forces Induastrial MeataL Laterthe group numbr. Also. when applicable, @bow that optionalmffarn, have boom used for Group 3 and Group 4 as &other- (4) 11U. L =iltary eagenie awp ebtaim *~Ie of
Plreport directly born DCC. Other qualifted sws&. EWORT TrTLE: Eawe the complete rpett title to aMl shoU request theesgbcapital letter,. Title. to all cases should be umcloseisifedU a amramingul thite ceinot he selected without cleasiftce-tiov. show tite clessifte~atlon im a&H capitols is pereathoee (5) "All distribetlas of this "aer is comehealleiL Qw*Iermedistely foleowing the wjle aled CDC users Sheal reque through4. DESCRIPT IVEt MOTES U appropriate, eate ths tooe of______________reprt e.g. interim, propwse, mumerY, GmRAN2, or (Lol U the repeet ben boom tweasbod to the Office of TssehiaGive the inclusive dates wam' a specific reporting period is Servicee. Depertes of Cnerce. f" ol ae to the piadic, ias&covered. Cat* twos fact sand ster the price. if bnewma,&. AIITVR(OX Eater ths sam~s) of outhot(s) me shows *a K SUmPLMBUARiYa uOTu Use feeassitiamami *sptmesor is the report. Rate lost name. firat same. swage iniiaL toynoeIt military, show reni and breach of service. The KnmowfOthe principal oAutor is as absolute miaisnrn roquiremrneoI 12. OX1OWfU VULTARY ACflV1T: ESote the sagin of
& RPOR DAL fte tbLdAQ f te p" o dl, the deperemeesal preJect of&*c of lobor" r a" peesorifste ("r6 EWRT DTL aterthedateof he rpor am ay. im# I"r) the research and developmmen. Iscinde address.
mofthkya. aot orwath, peoem If amor them one dame appeaseon the repot Use d40e of prablicatiom. 13. AUSTRACT: 3mW, as abotaset giving a brief and taelmm
$0MSnp of theA daCUrest indicatiVe Of the repotw Othe.MVI&TTAL MNOZ*R OF PAGZth The tMal pop eCsat It may also appear oelowber is the bedy of the teehalesl to.should follow we"ra pogialasto procedwee. ioe. enter the Pw- If odditiOSSI -0o is requited, a costioselate sheet shogwaimber of pagve containing Limformatios. 0. 1b a76. MUNBZR OF R&P hMIOCES Ente the toald wor ad ft is blily downrbl. that the abso ot of ciaeeifled rapsw"references cited is the repas.h elaild Ec asahfteabtataaiadwtS. CONTRACT OR GRANT XUE§ZR It aprprsiate. SOW 1- leisto . hemltayseeta l eifaties .6 the Wn
the applicable moobor of the comirect or SPU eat nudewic fenmetien is the pove~sh. repreemeed me (1S). (S3. (C). er (9).the reort wee "rittoTh Iner isom limitatiem on e .6the oshemect Nor-eb. a. &t 3d PROJECT NUM rawe the appeprialp ever ane sme"Gmaed 1600 is beNo Vi t 22S weas.military deperteret idesutifcatios. much "s projectseie. 4.ETV naKy rdaewclal m elhui
~piojct inber. ~ater inhe5, tak ~ Ior shoat preeae that chMreetr1 a repert red map he seed On9&. ORIOIATOWIS RWORTa NUin3RWO) Sawe the OMfi laden 62121 far caftmegims the epwr. Key verds Meet be*WisA repo thnmer by which the docameat will be Idestilied selected so that so security classfllcatnies Amrequired Idsee-sod coatolled by the mriginatlag activity. This w~obr meat Mars. euch me Iqu-irnea model desiqsmaies. bede ane Ioa",irbe "aque to this repot Poleoct code same. pepaphia location. eep be useed as hey96. OTHER RXPORT N1JiER~g): U the reoa ka be weds hat will be filiowed by an laicadmem of hachodal oamp.eassigned soy other roeort aumber (either by the ~ww, OWnt The 5essloeft of lim.s rules, sad weilhs is "90"L.
wrby the opemeor). also nowr this momhes(o)610. AVAELAELITYY/LINKTATION 1001T1CL& Eter sey the
mum lme anfwthsr dlsoemlsatiasi of the rePast, other themft
Secaft ly C wgi~c
i~T