Neural-network compensation methods for capacitive micromachined accelerometers for use in telecare...
5
248 IEEE TRANSACTIONS ON INFORMATION TECHNOLOGY IN BIOMEDICINE, VOL. 5, NO. 3, SEPTEMBER 2001 Neural-Network Compensation Methods for Capacitive Micromachined Accelerometers for Use in Telecare Medicine E. I. Gaura, R. J. Rider, N. Steele, and R. N. G. Naguib, Senior Member, IEEE Abstract—Transducers represent a key component of medical instru- mentation systems. In this paper, sensors that perform the task of mea- suring the physical quantity of acceleration are discussed. These sensors are of special significance since, by integrating their output signal, accelerom- eters can additionally provide a measure of velocity and position. Appli- cations for such measurements and, thus, of accelerometers, range from early diagnosis procedures for tremor-related diseases (e.g., Parkinson’s) to monitoring daily patterns of patient activity using telemetry systems. The system-level requirements in such applications are considered and two novel neural-network transducer designs developed by the authors are pre- sented, which aim to satisfy such requirements. Both designs are based on a micromachined sensing element with capacitive signal pickoff. The first is an open-loop design utilizing a direct-inverse-control strategy, while the second is a closed-loop design, where electrostatic actuation is used as a form of feedback. Both transducers are nonlinearly compensated, capable of self-test, and provide digital outputs. Index Terms—Accelerometer, neural network, smart transducer, telemedicine, telemetry. I. INTRODUCTION The development of advanced sensors and controls is one of the fastest growing research areas in recent years. This is particularly true in the medical field, where accurate measurement and control proce- dures are seen as vital in improving diagnosis and treatment and in deploying telecare/“hospital-at-home” services [1], [2]. In this paper, examples of accelerometer applications in medicine are reviewed, along with sensing ranges and sensitivities of acceleration sensors commonly used in such applications. The major system-level requirements for intelligent transducers are described and two novel neural-network-based accelerometer designs are proposed by the au- thors to meet these requirements. Motion sensing is not a new idea. For some years, medical systems have employed various forms of “externally referenced” motion-sensing techniques (e.g., video) [3], physically removed from the moving object of interest. These sensing methods are subject to obstructions, numerous interference, and noise sources [3]. A more tractable and generally effective type of motion sensor is the inertial sensor, which attaches directly to the moving body of interest and gives an output signal proportional to its own motion with respect to an inertial frame of reference [4]. Until recently, inertial sensors have found use in only a few fields, as their cost and size have been quite prohibitive [5]. 1 Since their inception, these sensors have generally been complex electromechan- ical devices; accelerometers have consisted of relatively large proof Manuscript received July 19, 1999; revised February 15, 2000. E. I. Gaura and R. N. G. Naguib are with the BIOCORE, School of Math- ematical and Information Sciences, Coventry University, Coventry CV1 5FB, U.K. R. J. Rider is with the School of Engineering, Coventry University, Coventry CV1 5FB, U.K. N. Steele is with the School of Mathematical and Information Sciences, Coventry University, Coventry CV1 5FB, U.K. Publisher Item Identifier S 1089-7771(01)04231-5. 1 [Online]. Available: http://www.itri.loyola.edu/mems masses, hinges, and servos [3]. Recent advances in microelectrome- chanical system (MEMS) technologies have made available silicon inertial sensors of very small size and low power consumption [6]. Such features permit a wide range of possible applications where motion/movement-controlled systems are used, including those found in biomedicine. Several examples of such applications are presented below. For medical applications, it is required that movements of different body parts are measured and recorded for further processing. Mea- surements may need to be taken either “on the spot” (short term), or continuously/intermittently over a long period of time. Gener- ally, “on-the-spot” measurements are used for diagnosis purposes (diagnosis of sleep disorders, Parkinson’s, and other tremor-related diseases). Most reported work, however, concentrates on long-term measurements of acceleration. In this category of applications, a new actigraph for recording the duration and intensity of tremor and movement has been developed by van Someren et al. [1]. This sensorial system has been developed primarily for the long-term evaluation of motor symptoms in Parkinson’s patients. A uniaxial accelerometer of a piezoelectric type is used and the analog signals acquired from the accelerometer are converted to the digital domain and processed by a microcontroller. Generally good results have been reported, although the sensitivity of the device was not sufficient for the assessment of a small amplitude tremor. A more specialized system for the assessment of daily physical activity has been proposed by Bouten et al. [7]. A triaxial accelerometer (composed of three orthogonally mounted piezoresistive analog accelerometers) was used to register accelerations covering the amplitude and frequency ranges of human body acceleration. A simpler alternative system for the assessment of energy expenditure was proposed by Sekine et al. [8]. This system used a triaxial piezoresistive accelerometer, connected to a portable data logger, which had a removable integrated-circuit (IC) memory card. By postprocessing the recorded data, physical activities such as walking or running could be identified and classified. A more detailed monitoring of the daily-life activities can be done by recording the acceleration of movements of individual parts of the body. Kurata et al. proposed a joint motion monitoring system [9]. With a view to developing versatile and simple-to-use biomedical in- strumentation, a sensor jacket has been designed for the noninvasive assessment of tremors, skin vibrations, and cardiovascular variables of cosmonauts [10]. Amongst other sensors, the jacket contains highly sensitive piezoresistive accelerometers. The measurement of physiological characteristics mentioned in the previous examples also have relevance in telemetric and telecare sys- tems. A basic telemetry system of daily-life motion has already been proposed by Kobayashi et al. [11]. The system provides a recording of activity based on measurements taken from a triaxial accelerometer. The sensor is located onto the patient’s chest and a portable module radio transmits the acquired signals. These signals are demodulated and processed by a host computer. All the applications considered thus far use off-the-shelf accelerom- eters, most of them of a piezoresistive type. These devices were of varied performance specifications, as different parts of the human body exhibit different motion characteristics in terms of acceleration ranges and frequencies. Verplaetse [3], for example, using a triaxial capacitive Analog Devices accelerometer, measured the accelerations of several parts of the body performing various activities. The quoted accelera- tions fall within the range 13 g (where g is the gravitational acceler- ation) and have frequencies of up to 20 Hz. Similar values have been reported in [7]. 1089–7771/01$10.00 © 2001 IEEE
Transcript of Neural-network compensation methods for capacitive micromachined accelerometers for use in telecare...

248 IEEE TRANSACTIONS ON INFORMATION TECHNOLOGY IN BIOMEDICINE, VOL. 5, NO. 3, SEPTEMBER 2001
Neural-Network Compensation Methods for CapacitiveMicromachined Accelerometers for Use
in Telecare Medicine
E. I. Gaura, R. J. Rider, N. Steele, andR. N. G. Naguib, Senior Member, IEEE
Abstract—Transducers represent a key component of medical instru-mentation systems. In this paper, sensors that perform the task of mea-suring the physical quantity of acceleration are discussed. These sensors areof special significance since, by integrating their output signal, accelerom-eters can additionally provide a measure of velocity and position. Appli-cations for such measurements and, thus, of accelerometers, range fromearly diagnosis procedures for tremor-related diseases (e.g., Parkinson’s)to monitoring daily patterns of patient activity using telemetry systems.The system-level requirements in such applications are considered and twonovel neural-network transducer designs developed by the authors are pre-sented, which aim to satisfy such requirements. Both designs are based ona micromachined sensing element with capacitive signal pickoff. The firstis an open-loop design utilizing a direct-inverse-control strategy, while thesecond is a closed-loop design, where electrostatic actuation is used as aform of feedback. Both transducers are nonlinearly compensated, capableof self-test, and provide digital outputs.
Index Terms—Accelerometer, neural network, smart transducer,telemedicine, telemetry.
I. INTRODUCTION
The development of advanced sensors and controls is one of thefastest growing research areas in recent years. This is particularly truein the medical field, where accurate measurement and control proce-dures are seen as vital in improving diagnosis and treatment and indeploying telecare/“hospital-at-home” services [1], [2].
In this paper, examples of accelerometer applications in medicine arereviewed, along with sensing ranges and sensitivities of accelerationsensors commonly used in such applications. The major system-levelrequirements for intelligent transducers are described and two novelneural-network-based accelerometer designs are proposed by the au-thors to meet these requirements.
Motion sensing is not a new idea. For some years, medicalsystems have employed various forms of “externally referenced”motion-sensing techniques (e.g., video) [3], physically removed fromthe moving object of interest. These sensing methods are subject toobstructions, numerous interference, and noise sources [3]. A moretractable and generally effective type of motion sensor is the inertialsensor, which attaches directly to the moving body of interest andgives an output signal proportional to its own motion with respect toan inertial frame of reference [4].
Until recently, inertial sensors have found use in only a few fields,as their cost and size have been quite prohibitive [5].1 Since theirinception, these sensors have generally been complex electromechan-ical devices; accelerometers have consisted of relatively large proof
Manuscript received July 19, 1999; revised February 15, 2000.E. I. Gaura and R. N. G. Naguib are with the BIOCORE, School of Math-
ematical and Information Sciences, Coventry University, Coventry CV1 5FB,U.K.
R. J. Rider is with the School of Engineering, Coventry University, CoventryCV1 5FB, U.K.
N. Steele is with the School of Mathematical and Information Sciences,Coventry University, Coventry CV1 5FB, U.K.
Publisher Item Identifier S 1089-7771(01)04231-5.
1[Online]. Available: http://www.itri.loyola.edu/mems
masses, hinges, and servos [3]. Recent advances in microelectrome-chanical system (MEMS) technologies have made available siliconinertial sensors of very small size and low power consumption [6].Such features permit a wide range of possible applications wheremotion/movement-controlled systems are used, including those foundin biomedicine. Several examples of such applications are presentedbelow.
For medical applications, it is required that movements of differentbody parts are measured and recorded for further processing. Mea-surements may need to be taken either “on the spot” (short term),or continuously/intermittently over a long period of time. Gener-ally, “on-the-spot” measurements are used for diagnosis purposes(diagnosis of sleep disorders, Parkinson’s, and other tremor-relateddiseases). Most reported work, however, concentrates on long-termmeasurements of acceleration. In this category of applications, anew actigraph for recording the duration and intensity of tremorand movement has been developed by van Somerenet al. [1]. Thissensorial system has been developed primarily for the long-termevaluation of motor symptoms in Parkinson’s patients. A uniaxialaccelerometer of a piezoelectric type is used and the analog signalsacquired from the accelerometer are converted to the digital domainand processed by a microcontroller. Generally good results have beenreported, although the sensitivity of the device was not sufficientfor the assessment of a small amplitude tremor. A more specializedsystem for the assessment of daily physical activity has been proposedby Boutenet al. [7]. A triaxial accelerometer (composed of threeorthogonally mounted piezoresistive analog accelerometers) was usedto register accelerations covering the amplitude and frequency rangesof human body acceleration. A simpler alternative system for theassessment of energy expenditure was proposed by Sekineet al. [8].This system used a triaxial piezoresistive accelerometer, connected toa portable data logger, which had a removable integrated-circuit (IC)memory card. By postprocessing the recorded data, physical activitiessuch as walking or running could be identified and classified.
A more detailed monitoring of the daily-life activities can be doneby recording the acceleration of movements of individual parts of thebody. Kurataet al. proposed a joint motion monitoring system [9].With a view to developing versatile and simple-to-use biomedical in-strumentation, a sensor jacket has been designed for the noninvasiveassessment of tremors, skin vibrations, and cardiovascular variables ofcosmonauts [10]. Amongst other sensors, the jacket contains highlysensitive piezoresistive accelerometers.
The measurement of physiological characteristics mentioned in theprevious examples also have relevance in telemetric and telecare sys-tems. A basic telemetry system of daily-life motion has already beenproposed by Kobayashiet al. [11]. The system provides a recordingof activity based on measurements taken from a triaxial accelerometer.The sensor is located onto the patient’s chest and a portable moduleradio transmits the acquired signals. These signals are demodulated andprocessed by a host computer.
All the applications considered thus far use off-the-shelf accelerom-eters, most of them of a piezoresistive type. These devices were ofvaried performance specifications, as different parts of the human bodyexhibit different motion characteristics in terms of acceleration rangesand frequencies. Verplaetse [3], for example, using a triaxial capacitiveAnalog Devices accelerometer, measured the accelerations of severalparts of the body performing various activities. The quoted accelera-tions fall within the range�13 g (where g is the gravitational acceler-ation) and have frequencies of up to 20 Hz. Similar values have beenreported in [7].
1089–7771/01$10.00 © 2001 IEEE

IEEE TRANSACTIONS ON INFORMATION TECHNOLOGY IN BIOMEDICINE, VOL. 5, NO. 3, SEPTEMBER 2001 249
The mass provision of services that could potentially be offered bytelecare systems place additional requirements on the acceleration mea-suring devices over and above the examples reported here. Williamset al. [2], [12] provides a comprehensive system-level design of an in-telligent telecare system. It is pointed out that there exists the possibil-ities of incorrect data or sensor failure (which may represent a serioushazard for the patient). Thus, smart sensors (integrated sensor and sen-sorial control) incorporating features such as built-in self-test and datavalidation will have to be developed. Commercial piezoresistive trans-ducers such as the ENDEVCO with a sensitivity of 1.8 mV/g [1] andthe ENTRAN, with a sensitivity of 10 mV/g, can achieve accuracies ofthe order of milli-G, where G is the gravitational acceleration, over re-stricted ranges. However, their low-level output and internal structureprohibit their inclusion within control loops and, thus, preclude theiruse in smart systems. In contrast, the capacitive sensors used here as abasis for the design work posses the features necessary to allow theirembedding into smart structures.
The system-level requirements and the strategy for developing intel-ligent transducers are described in Section II.
II. SYSTEM-LEVEL REQUIREMENTS FORINTELLIGENT TRANSDUCERS
As medical equipment and procedures become more automated, theneed for sophisticated sensors and a control approach increases. Evo-lution of smart transducer design has been driven to a large degree bythe advances in both signal conditioning and micromachining technolo-gies.
In the past, most sensors have been regarded as standalone com-ponents to be plugged into larger systems. One of the current goalsof technology is to transfer computation and communication capabili-ties from within the traditional computer environment into the devicesthemselves [3], [13]. Thus, in the development of intelligent trans-ducers, the sensors must be considered as being a system element. In-tegration of sensor and sensor electronics can be achieved by manufac-turing the micromachined accelerometers in silicon. The electronicscan then be uniquely tailored to perform sensor signal conditioning tofit specific sensor properties. For example, sensor readout, compensa-tion of nonideal effects, calibration, testing, and monitoring for depend-ability can be included within the transducer system [14]. Althoughother features such as peripheral functions, output interfacing, and dataprocessing may be required for complete transducer operation, only thesensor signal conditioning and its integration within transducer systems(either in monolithic or in hybrid form) is considered in this paper. Nu-merous challenges exist to successfully integrate signal conditioningcircuitry within transducers and MEMS [5].
Integrated sensors typically produce outputs extending down to themicrovolt range (limited by noise), and their signal pickoff circuitriesseek to resolve changes in resistance of milliohms (piezoresistive sen-sors) or capacitance of femtofarads (capacitive sensors). The outputsignals are continuously changing (analog) and are usually sensitive tosecondary variables such as temperature [15]. Zero-point outputs (off-sets) and sensitivities (slopes) are often temperature dependent and mayalso be nonlinear [4], [15]. Additionally, the outputs may drift over time[5].
In contrast to these intrinsic characteristics of “off-the-shelf”sensors, it is required that smart sensor systems provide stable digitaloutput signals [5], [4]. Further, any secondary-variable sensitivity[16], [17] (e.g., to temperature) should be eliminated along withany nonlinearity problems [4], [15]. The sensor system must betestable either online (during operation) or offline (during regularmaintenance) [14]in situ in order to ensure reliable sensing underoperational conditions (sensors are exposed to external hazards,which might partially or totally damage them). Controlling invasive
biomedical procedures, for example, on the basis of devices that arenot testable, is clearly undesirable.
From the requirements mentioned above, the need for amplification,multiplexing, and temperature compensation [15] of sensorial signalshas been well accepted for many years. Such circuitry has been addedeither in monolithic or hybrid form to a great many devices [4], [14],[15]. The analog sensors’ output signal have sometimes been fed into aremote analog-to-digital converter (ADC) and microcomputer [18] andthen, perhaps, to a hierarchical control system.
As indicated earlier, the present trend in the microsensors field istoward integrating the ADC, computer processing, and control into thesensing/MEMS module itself [13]. The module would then be trulysmart and able to respond to various commands received externallyover a digital sensor bus. Using onboard memory, correction for tem-perature sensitivity and device nonlinearities can be done in software,allowing at least an order of magnitude improvement in accuracywhen compared to hardware trim techniques. The improvement isdue to the ability of software to implement more precisely nonlinearresponse characteristics using computed polynomials, lookup tablesor, as suggested by Gauraet al. [19], [20], artificial intelligence tech-niques. Such systems are not yet fully realized, although a number ofcompanies are experimenting with them in various forms [21].2 Mostinvolve a number of chips, assembled in hybrid form using surfacemount or multichip module (MCM) technology. In the near future,however, many such modules will probably evolve to a two-chiphybrid, with a front-end sensor/actuator/MEMS chip coupled to anembedded microcontroller/microprocessor chip [5], [13].
III. N EURAL-NETWORK-BASED DESIGN STRATEGIES FOR
ACCELEROMETERS
In this section, two smart transducer designs are proposed, basedon artificial neural network (ANN) techniques. It has been shown thatthese techniques can be used as a representation framework for mod-eling and controlling nonlinear dynamical systems [22], [23]. Amongstthe features that make neural networks suitable for control tasks, themain ones are as follows.
• They can be trained to learn any function, provided that enoughinformation is given during the training process, coupled with ju-diciously selected neural models. This self-learning ability of theneural networks eliminates the use of complex and difficult math-ematical analysis, which is dominant in many traditional adaptiveand optimal control methods.
• The inclusion of a semilinear sigmoidal activation function inthe hidden neurons of multilayered neural networks offers a non-linear mapping ability for solving highly nonlinear control.
• Due to their self-learning capability, neuro-controllers do not re-quire extensivea priori information about the system under con-trol. Thus, provided that they are adequately trained, neuro-con-trollers are able to perform the control task under a wider rangeof system uncertainty.
The neural-network-based designs presented here are aimed at im-proving the performance of open-loop off-the-shelf capacitive sensorsand increasing their robustness to manufacturing tolerances. The firstdesign was based on the measured characteristic of a sensor and usesan open-loop direct-inverse-control technique. The second design wasbased on a mathematical model of the sensor. This design was validatedand tested in simulation.
The acceleration sensors chosen here for the development of thesmart transducers are those with a capacitive type of signal pickoff. Thesensing element typically comprises a seismic mass, which can move
2[Online]. Available: http://www.analog.com/publications/whitepapers/prod-ucts/Sensordetroit/Sensordetroit/html

250 IEEE TRANSACTIONS ON INFORMATION TECHNOLOGY IN BIOMEDICINE, VOL. 5, NO. 3, SEPTEMBER 2001
between two fixed electrodes, each forming a capacitor with the seismicmass that acts as a common central electrode. The differential change incapacitance between the capacitors is proportional to the deflection ofthe seismic mass from the mid-position. A capacitive half-bridge tech-nique is used to measure the differential change in capacitance. Thebridge is excited with a high-frequency signal applied in antiphase tothe top and bottom electrodes. The magnitude of the signal collectedfrom the central electrode (seismic mass) is proportional to the differ-ential change in capacitance [4], [24].
This pickoff method provides higher output voltage levels than thatassociated with piezoresistive sensors and has very low sensitivity totemperature drift. Most importantly, sensors with capacitive pickoff canbe readily used in force-balancing configurations (closed-loop opera-tion) [4]. Hence, intelligence can be built into the transducers structure.A self-test can be implemented by applying voltages to the outer elec-trodes to emulate the inertial force on the seismic mass. A disadvan-tage of this pickoff method is that the electronics for signal processingcan become quite complex because differential capacitances have tobe measured with a resolution down to femtofarads in some devices,making them very sensitive to parasitic capacitances.
It has been shown, both by mathematical modeling and measure-ments [4], [19], that these devices not only exhibit nonidealities suchas offset, drift, nonlinearity, and noise, but also the magnitude of thesenonidealities can vary. Moreover, fundamental characteristics of thesensor, e.g., sensitivity, may be subject to manufacturing tolerances,varying material properties, and ambient effects [4], [25]. Compensa-tion of time-variant ambient effects, such as temperature, requires con-tinuous monitoring of these effects and online correction of the sensorbehavior. On the other hand, time-invariant departures from ideal be-havior can be corrected using single-shot correction procedures. Bothcorrection procedures may require additional hardware and softwareand must, therefore, be considered during the design phase of the sensorsystem [14].
A. Measurement-Based Open-Loop Compensation ofa Micromachined Accelerometer (Neural-NetworksDirect-Inverse-Control Procedure)
A vital step in attempting to produce accelerometers of improvedperformance is to select a suitable control strategy to be applied to thesensing element. A large number of control strategies based on neuralnetworks have been proposed and used [22], [23]. One of the simplestoptions that could be used in static/low-frequency transducer applica-tions is direct inverse control.
The direct-inverse-control technique utilizes an inverse systemmodel. If the model of the sensor is invertible, then the inverse of thesensor model can be approximated. This model is then used as thecontroller. The inverse model is simply cascaded with the controlledsystem in order that the aggregated system results in an identitymapping between the desired response (i.e., the network input) andthe controlled system output. Thus, the network acts directly as acontroller in such configurations [22].
The transducer design proposed here (based on the above tech-nique), which is aimed at static and low-frequency applications,addresses some of the typical nonideal effects associated with capaci-tive micromachined sensors; these being as follows:
• offset of the seismic mass from the central position between theplates, in which the offset arises due to the accumulation of man-ufacturing tolerances during the assembly process;
• piecewise linear input–output characteristic (i.e., the sensor hasdifferent sensitivities for different input ranges);
• squeeze film damping (the gaseous medium between the elec-trodes and seismic mass produces nonlinear damping due to the
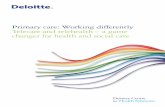
Fig. 1. Measured static characteristic of a micromachined sensing element.
small physical dimensions of the micromachined product), as aresult of which, the sensor characteristic exhibits hysteresis.
In order to compensate for these nonideal effects, it is necessary tocharacterize the behavior of the micromachined sensing element. Staticmeasurements were undertaken by the authors by mounting a sensingelement (manufactured and kindly supplied by Druck Ltd., Leicester,U.K.) on a dividing head and rotating it at a frequency of 1 Hz in thegravitational field. In this way, acceleration of between�1 g couldbe applied to the sensing element. Fig. 1 shows the measured staticcharacteristic of the sensing element.
Over the acceleration range tested, the sensor characteristic exhibitsonly offset and hysteresis. The offset is due to the offset of the seismicmass from the midpoint between the two outer electrodes. The averageoffset was�270 mV (equivalent to an acceleration of 0.612 g) and thehysteresis was 60 mV (equivalent to an acceleration of 0.136 g). Thesensitivity of the device was calculated as 440.5 mV/g.
It has been shown previously [20] that offset and hysteresis can betreated separately and that individual compensation networks can bedesigned for each case. These compensating networks can then betrained and cascaded with the sensing element. However, it is proposedhere to compensate both offset and hysteresis with a single network.
The compensation task selected was to reconstruct a low-frequencysine wave after it has been distorted by the sensor. In order to be ableto validate the compensation procedure, a forward model of the sensorwas required. Due to the presence of hysteresis, tap-delayed line net-works are needed for both inverse and forward models of the sensorcharacteristic. It was decided that a three-input network (the currentand one-unit delayed and two-unit delayed signals) should be suitablefor these particular characteristic identification/compensation tasks.
The training sets were based on 103 input–output measurementstaken from the sensor rotating in the gravitational field. A MATLABprogram was designed to generate the supplementary network inputs:delayed versions at moments (k � 1) and (k � 2) of the sensor inputfor the forward model of the sensor and delayed versions at moments(k�1) and (k�2) of the sensor output for the inverse one. Fig. 2 showsthe block diagrams of the training schemes used for the two models. Adynamic error-back-propagation training algorithm was designed thatincluded both a variable learning rate and momentum term [20], [26].
Once trained, the inverse and forward networks were subsequentlyconnected (cascaded) together to perform a 2-to-1 mapping, aiming ata 500-mV/g sensitivity for the calibrated sensor system.
To test the system, a sine wave of 9.81 V (equivalent to an acceler-ation of 1 g) amplitude and 1-Hz frequency was scaled and sampledto provide 115 test points, approximately midway in between the mea-surement points. The static characteristic obtained by cascading a 3�

IEEE TRANSACTIONS ON INFORMATION TECHNOLOGY IN BIOMEDICINE, VOL. 5, NO. 3, SEPTEMBER 2001 251
(a)
(b)
Fig. 2. (a) ANN training for forward modeling. (b) ANN training for inversemodeling.
Fig. 3. Effects of direct inverse control on sensor behavior.
5 � 1 network (forward model) with a 3� 8 � 1 network (inversemodel) is shown in Fig. 3.
It can be noted from this figure that both the sensor offset and thehysteresis have been compensated. The measurement system function-ality has, therefore, been significantly improved.
The procedure has been successful and uncomplicated for this partic-ular problem. For applications where accuracy and linearity is neededover a larger dynamic range and at higher frequencies, the formation of atrainingset,gatheringofmeasurementdata,and trainingofnetsmaynot,however, be straightforward. Also, it may be noted that the system is notrobust to the incidence of extraneous disturbances, due to the open-loopnatureof thecontrolsystem.Moreover,exposure toaccelerationsgreaterthan a threshold value causes irreversible latch-up of the seismic mass toone orother of theouter electrodes. One wayof increasing thesystem ro-bustness and stability is to apply some form of feedback. This approachwill be considered below at simulation level.
Fig. 4. Block diagram of closed-loop neural transducer.
B. Closed-Loop Neural-Network Controlled MicromachinedAccelerometer Design
The small size of the sensing element allows electrostatic actuationto be used as a form of feedback. Thus, the inertial force acting onthe proof mass is balanced by an opposing electrostatic force. Simplelinear proportional integral (PI) control has been attempted [4], but thisfails to solve the latch-up problem. Nevertheless, the PI approach hasbeen used in many devices described in the literature [4] since it doesimprove the sensor performance compared to open-loop operation.
In contrast to the linear control approach, the novel transducer de-sign proposed by the authors uses the nonlinear mapping capabilitiesof neural networks for controlling the sensing element and linearizingthe electrostatic forces. At this stage of research, the system developedwas tested in simulation only. A block diagram representation of theproposed system is given in Fig. 4.
The compensating neural network (CNN) performs a static map-ping acting as a nonlinear gain controller. The feedback neural net-work (FNN) has two functions. Firstly, it calculates the square root ofthe output voltage, providing a linear feedback relationship betweenthe system output and the electrostatic forces acting on the electrodes.Secondly, the network demodulates the output signal in order to applythe feedback to only one electrode at a time: the bottom electrode willbe activated if the proof mass has moved toward the top electrode andvice-versa [19].
This design combines the advantages of linear feedback electrostaticforces, time-domain separation of feedback/sensing phases, and soft-limiting nonlinear gain control. The functionality of the system wasstudied by subjecting the transducer to a wide variety of stimuli andestablishing both its advantages and limitations.
The static characteristic of the transducer system is presented inFig. 5. The system behaves linearly up to approximately�6 g (as op-posed to�1 g for the sensing element) with a sensitivity of approxi-mately 3 V/g and exhibits a slight hysteresis between�6 g and�8 g,followed by saturation. However, a major decrease in the bandwidthoccurs with this particular design for acceleration magnitudes higherthan 6jgj. Shocks in acceleration of up to 25 g can be withstood by thetransducer, without irreversible latch-up, as indicated in Fig. 6, pro-vided that the duration of such a shock is less than 30 ms.
According to the application requirements for the accelerationsensor, the design can be easily altered. By modifying the CNNscaling factors, improved linearity can be obtained for a restrictedrange (precision applications), or the whole dynamic range extended,with a reduced linearity.
In order for the analysis of the transducer to be complete, the fre-quency behavior of the system must be considered. Due to the non-linear nature of the system, a simple ac sweep was not possible. How-ever, for a given magnitude of the input signal, parametric analysiscould be performed as a function of frequency. Bode diagrams werethen drawn for the fundamental component of the transducer output. Itwas found that the transducer had a flat frequency response up to ap-proximately 300 Hz, but the phase shift reached quite large values atfrequencies above about 30 Hz. Some gain changes took place as themagnitude of the input acceleration was varied, due to the slightly non-

252 IEEE TRANSACTIONS ON INFORMATION TECHNOLOGY IN BIOMEDICINE, VOL. 5, NO. 3, SEPTEMBER 2001
Fig. 5. Static characteristic of closed-loop neural transducer.
Fig. 6. Response of neural transducer to shocks in acceleration.
linear static transfer characteristic of the novel transducer. However,the general performance of the novel transducer showed considerableimprovement over that of the prototype PI transducer where the gainvariation for the [1jgj–4jgj] magnitude range was 6 dB (compared toless than 3 dB for the novel design).
The simulation results for the neural accelerometer are sufficientlyencouraging to justify development of a prototype. Therefore, workis currently progressing on the hardware implementation of the trans-ducer.
IV. CONCLUSIONS
In this paper, the system-level requirements for accelerometers tobe used in biomedical applications have been considered. Two novelneural-network-based transducer designs have been presented, whichaim to satisfy such requirements. Both transducers are compensatedusing nonlinear techniques and are capable of self-test. They providedigital outputs (subject to microprocessor implementation of theneural networks) at voltage levels of 0.5 and 3 V/g for the open-and closed-loop configurations, respectively. Online compensationprocedures are still to be developed to accommodate manufacturingtolerances and drift of various parameters over time. It is envisagedthat such procedures will require online sensor identification [25] andadaptive control. Work is in progress on these aspects and will be thesubject of a future paper.
REFERENCES
[1] E. J. W. van Someren, B. F. M. Vonk, W. A. Thijssen, J. D. Speelman,P. R. Schuurman, M. Mirmiran, and D. F. Swaab, “A new actigraph forlong-term registration of the duration and intensity of tremor and move-ment,” IEEE Trans. Biomed. Eng., vol. 45, pp. 386–395, Mar. 1998.
[2] G. Williams, K. Doughty, and D. A. Bradley, “A systems approach toachieving CarerNet—An integrated and intelligent telecare system,”IEEE Trans. Inform. Technol. Biomed., vol. 2, Mar. 1998.
[3] C. Verplaetse, “Inertial proprioceptive devices: Self-motion-sensing toysand tools,”IBM Syst. J., vol. 35, no. 3/4, 1996.
[4] M. Kraft, “Closed-loop accelerometer employing oversampling conver-sion,” Ph.D. dissertation, School Eng., Coventry Univ., Coventry, U.K.,1997.
[5] K. D. Wise, “Micromechanical systems development in Japan,” Nat.Tech. Inform. Service, U.S. Dept. Commerce, Springfield, STATE,JTEC Panel Rep. Microelectromech. Syst. Japan (9/94) PB95-100244,Sept. 1994.
[6] M. Bao and W. Wang, “Future of microelectromechanical systems(MEMS),” J. Sens. Actuators, vol. A56, pp. 135–141, 1996.
[7] C. V. C. Bouten, “A triaxial accelerometer and portable data processingunit for the assessment of daily physical activity,”IEEE Trans. Biomed.Eng., vol. 44, pp. 136–147, Mar. 1997.
[8] M. Sekine, T. Tamura, M. Ogawa, T. Togawa, and Y. Fukui, “Classi-fication of acceleration waveform in a continuous walking record,” inProc. 20th IEEE EMBS Annu. Int. Conf., Hong Kong, Oct. 1998, pp.1523–1526.
[9] S. Kurata, M. Makikawa, H. Kobayashi, A. Takahashi, and R. Tokue,“Joint motion monitoring by accelerometers set at both near sides aroundthe joint,” in Proc. 20th Annu. IEEE EMBS Int. Conf., Hong Kong, Oct.1998, pp. 1936–1939.
[10] E. Gallasch, D. Rafolt, M. Moser, and J. Hindinger, “Instrumentationfor assessment of tremor, skin vibrations, and cardiovascular variables inMIR space missions,”IEEE Trans. Biomed. Eng., vol. 43, pp. 328–333,Mar. 1996.
[11] I. Kobayashi, R. Hayashi, A. Sugawara, and H. Matsumoto, “Telemetrysystem of daily life motion and arrhythmia,” inProc. 20th IEEE EMBSAnnu. Int. Conf., Chicago, IL, Oct. 1997, pp. 2229–2231.
[12] G. Williams, K. Doughty, K. Cameron, and D. A. Bradley, “A smartfall and activity monitor for telecare applications,” inProc. 20th IEEEEMBS Annu. Int. Conf., Hong Kong, Oct. 1998, pp. 1151–1154.
[13] W. Lang, “Reflexions on the future of microsystems,”J. Sens. Actuators,vol. 72, pp. 1–15, 1999.
[14] B. J. Hosticka, “CMOS sensor systems,”J. Sens. Actuators, vol. A66,pp. 335–341, 1998.
[15] S. Poopalasingam, “Neural network based digital compensationschemes for industrial pressure sensors,” Ph.D. dissertation, SchoolMath. Inform. Sci., Coventry Univ., Coventry, U.K., Sept. 1995.
[16] J. C. Lotters, J. G. Bomer, A. J. Verloop, E. A. Droog, W. Olthuis, P.H. Veltink, and P. Bergveld, “Design fabrication and characterizationof a highly symmetrical capacitive triaxial capacitive accelerometer,”J.Sens. Actuators, vol. A66, pp. 205–212, 1998.
[17] J. C. Lotters, J. Schipper, P. H. Veltink, W. Olthuis, and P. Bergveld,“Procedure for in-use calibration of triaxial accelerometers in medicalapplications,”J. Sens. Actuators, vol. A68, pp. 221–228, 1998.
[18] P. Ripka and P. Rozensky, “Accelerometric logger,” inProc. 11th Eu-ropean Solid-State Transducers Conf., Warsaw, Poland, Sept. 1997, pp.1325–1329.
[19] E. Gaura, N. Steele, and R. J. Rider, “A neural networks approach forthe design of micromachined accelerometers,” inProc. Int. Comput. In-tell. Modeling, Contr., Automat. Conf., Vienna, Austria, Feb. 1999, pp.117–121.
[20] N. Steele, E. Gaura, and R. J. Rider, “Direct inverse control of sensorsby neural networks for static/low frequency,” inProc. ICANNGA’99,Portoroz, Slovenia, pp. 135–140.
[21] J. Doscher, “Applications for low g micromachined accelerometers,”Analog Devices, Norwood, MA, Whitepapers, 1999.
[22] G. W. Irwin, K. Warwick, and K. J. Hunt, “Neural networks applicationsin control,” in IEE Control Engineering, ser. 53. London, U.K.: ShortRun Press, 1995.
[23] N. Steele, E. Gaura, and J. Godjevac, “Neural networks in control,” inProc. 3rd European IEEE Computer-Intensive Meth. Contr. Data Pro-cessing Workshop, Prague, Czech Republic, Sept. 1998, pp. 187–199.
[24] L. Zimmermann, F. Le Hung, and J. M. Dujardin, “Surface mount ac-celerometer for high volume production,” inProc. Eurosens. X, vol. 5,Leuven, Belgium, Sept. 1996, pp. 1497–1500.
[25] E. Gaura, N. Steele, and R. J. Rider, “A neural network approach forthe identification of micromachined accelerometers,” inProc. 2nd Int.Modeling Simulat. Microsyst. Conf., San Juan, Puerto Rico, Apr. 1999,pp. 245–248.
[26] E. Gaura and A. Burian, “A dedicated medium for the synthesis of BKPnetworks,”Romanian J. Biophys., vol. 5, no. 15, pp. 41–50, 1995.