NEURAL MODEL FOR BIOLOGICAL AND CHEMICAL TRANSFORMATION IN SEWAGE
14
Prace Naukowe Instytutu Maszyn, Napędów i Pomiarów Elektrycznych Nr 63 Politechniki Wroclawskiej Nr 63 Studia i Materialy Nr 29 2009 Sewage treatment plant, neural networks estimation, process control Krzysztof SZABAT * , Marcin KAMIŃSKI * NEURAL MODEL FOR BIOLOGICAL AND CHEMICAL TRANSFORMATION IN SEWAGE TREATMENT PLANT In the work issues related to modeling of the biological-chemical wastewater treatment plant are presented. A commonly-used control strategy including model predictive control of the wastewater treatment plant are presented. Then a model of biological and chemical transformations AMS1 is de- scribed and its limitations are pointed out. Then the feed-forward neural networks are introduced. The performance of the obtaining models are shown and discussed. The designed models can be used in the model predictive control structure (MPC) of the savage treatment plant and ensure the optimal control of the electrical blowers. 1. INTRODUCTION Control processes in sewage treatment plants is a rapidly growing field of knowl- edge. This follows on the one hand the universality of using urban wastewater treat- ment and industrial processes, striving for continuous reduction of maintenance costs of wastewater treatment as well as a complicated and non-linear model of the trans- formation of compounds in the treatment process. Optimal control strategy should be the one hand, easy to install on the other lead to a reduction of operating costs and prevent exceeding the limits on the outflow of sewage. In the literature there are a number of control structures for control processes used in the sewage treatment plant [1]-[4]. The simplest control strategies based on maintaining constant air flow to the zones of nitrification in the biological reactor. The advantage of this approach is its simplic- ity. It does not require any installed sensors in the bioreactor. Disadvantages of this strategy stem from the constant flow of air from the electrical blowers into the biore- __________ * * Politechnika Wroclawska, Instytut Maszyn, Napędów i Pomiarów Elektrycznych, 50-370 Wro- claw, ul. Smoluchowskiego 19, [email protected], [email protected]
Transcript of NEURAL MODEL FOR BIOLOGICAL AND CHEMICAL TRANSFORMATION IN SEWAGE

Prace Naukowe Instytutu Maszyn, Napędów i Pomiarów Elektrycznych
Nr 63 Politechniki Wrocławskiej Nr 63
Studia i Materiały Nr 29 2009
Sewage treatment plant, neural networks
estimation, process control
Krzysztof SZABAT∗, Marcin KAMIŃSKI *
NEURAL MODEL FOR BIOLOGICAL AND CHEMICAL
TRANSFORMATION IN SEWAGE TREATMENT PLANT
In the work issues related to modeling of the biological-chemical wastewater treatment plant are
presented. A commonly-used control strategy including model predictive control of the wastewater
treatment plant are presented. Then a model of biological and chemical transformations AMS1 is de-
scribed and its limitations are pointed out. Then the feed-forward neural networks are introduced. The
performance of the obtaining models are shown and discussed. The designed models can be used in
the model predictive control structure (MPC) of the savage treatment plant and ensure the optimal
control of the electrical blowers.
1. INTRODUCTION
Control processes in sewage treatment plants is a rapidly growing field of knowl-
edge. This follows on the one hand the universality of using urban wastewater treat-
ment and industrial processes, striving for continuous reduction of maintenance costs
of wastewater treatment as well as a complicated and non-linear model of the trans-
formation of compounds in the treatment process. Optimal control strategy should be
the one hand, easy to install on the other lead to a reduction of operating costs and
prevent exceeding the limits on the outflow of sewage. In the literature there are a
number of control structures for control processes used in the sewage treatment plant
[1]-[4].
The simplest control strategies based on maintaining constant air flow to the zones
of nitrification in the biological reactor. The advantage of this approach is its simplic-
ity. It does not require any installed sensors in the bioreactor. Disadvantages of this
strategy stem from the constant flow of air from the electrical blowers into the biore-
__________
∗ * Politechnika Wrocławska, Instytut Maszyn, Napędów i Pomiarów Elektrycznych, 50-370 Wro-
cław, ul. Smoluchowskiego 19, [email protected], [email protected]

actor. Under conditions of low water flow the bioreactor is over-aerated. Even the
slow increase in the flow of pollution can be brought to exceed the limits in the out-
flow. Despite these drawbacks, this strategy is still in use [1].
More advanced control strategy commonly used for small wastewater treatment
plants in Poland consists in controlling the dissolved oxygen level in bioreactor. It
requires the installation of oxygen sensors in the selected parts of the bioreactor. Usu-
ally the PI (in the case of the variable speed drive) or hysteresis (in the case of the
direct switched motors without converter) controllers are applied. Depending on the
value of the control signal the number of the electrical blowers can be set on or off.
This control strategy do not take into consideration the input of the bioreactor which
is it drawback. The large values of the inflow can lead the dissolved oxygen level
below the required value. This may result in exceeding the limit values at the
effluent [1]-[2]. Another strategy, also based on controlling the level of oxygen, introduced into
the system additional information about the state of system input. Usually this is done
by adding to the classic structure the feed-forward controller. Different functions of
the activation of additional controller may be used, such as linear, fuzzy, etc. The use
of the additional information from the system input results in increase the level of
oxygen in bioreactor which prepare a system to adopt more west water. The disadvan-
tage of this strategy is the need to applied the additional sensors at the input of the
system. This strategy can be especially effectively applied in the waste-water treat-
ment plant in the case of the variable-speed electrical blowers driven by the power
converter [1]-[2].
One of the most modern methods of control used at wastewater treatment plants is
MPC [4]-[5]. It ensures the optimal control of wastewater treatment process. This
allows reductions in operating costs for wastewater treatment and avoid the exceed
the limits in the outflow. Its drawback is a very complicated algorithm which require
the information of all state variables and disturbances of the process. These are usu-
ally estimated by the Kalman filter [5]. Based on the current state of the system a
control algorithm (using a model biological transformations of chemical state of the
system) calculate within a specified time horizon the state of the plant. The system
behavior is calculated for various control options and then the optimal strategy is se-
lected (which guarantee the minimal value of the cost function). This requires the
implementation of many simulations in a finite period of time. It is therefore neces-
sary to install a unit for high-power computing. One way to simplify the calculation is
to replace the complex mathematical model of the plant by a simpler and faster neu-
ral model. Also this strategy needs modern electrical drives to be installed in the sew-
age treatment plant.
In the literature many applications of the neural networks to control and diagnosis
of biological-chemical processes in wastewater treatment plants can be found [2], [4],
[6], [7]. Neural networks have been used to predict a variable inflow of sewage treat-

ment, model the entire system, estimation of individual parameters or in the control
system application. In the few works issues related to the replacement of the analyti-
cal model by neural network are raised.
The main objective of the work is to present the neural model transformations of
biological chemistry in sewage. After a short introduction the analytical model for
biological-chemical transformation ASM1 is introduced [2]-[4]. Successively the
structure of the feed-forward neural networks are described. Then the training and the
validation data are discussed. Next the obtained results are presented and described.
The scope of future research is clarified. The obtained model can be used in order to
provide the optimal control signal for the electrical machines installed in the waste-
water treatment plant using MPC strategy.
2. ASM1 MODEL
ASM1 model describes the transformation of organic compounds and nitrogen in
sewage treatment plant. Its original form was proposed in 1987 in [8]. It consisted of
eight equations that describe the kinematics of change by manipulating the 13 state
variables. ASM1 model was based on mass balance equations and stoichiometric rela-
tionships of kinematics. Currently used form consists of ten equations which describ-
ing the transformation of the fourteen variables.
ASM1 model operates on the following state variables:
-SS easily degradable organic compounds considered as dissolved ; simple
organic compounds, which are the source of energy and raw materials for the hetero-
trophic growth of microorganisms.
-SI dissolved organic compounds biologically nondegradable treated as dis-
solved organic compounds do not take part in biological processes, their do not
change their composition or character.
-SNH – ammonium nitrogen , expressed as the sum of ammonia (NH3) and am-
monium (NH4+).
-SNO nitrate nitrogen , expressed as an aggregate concentration of nitrates and
nitrites in the model because it does not take into account the fraction of nitrite.
-SND Dissolved organic nitrogen , nitrogen being the combinations of readily
biodegradable organic compounds
-SO dissolved oxygen .

-SALK alkalinity .
-XS slowly biodegradable organic compounds , organic compounds of large
size; it is assumed that they are suspended, although some may be present in dissolved
form.
-XI organic compounds in a suspension of biologically non degradable
,
suspensions and colloids of organic compounds that are resistant to biodegradation
biodiversity, they do not change their composition or character.
-XBH – heterotrophic bacteria , microorganisms, which in carry out the bio-
degradation in aerobic and anaerobic zones, as well as the hydrolysis and ammonifica-
tion of XS
-XBA autotrophic bacteria , microorganisms that carry out the process of nitri-
fication - derive energy from oxidation of ammonia; this fraction express at the same
time the microorganisms which oxidizing of nitrite and ammonia
-XP products of biomass death , organic compounds in the suspension result-
ing from the withering away of biomass, resistant to biodegradation.
-XND organic nitrogen in the suspension , Organic nitrogen which is con-
nected with the fraction XS. Together with XS hydrolyzes to dissolved organic nitro-
gen (SND)
-XMIN – mineral slurry , a suspension, which is not included in the COD and do
not undergo any treatment.
The expression (1) describe the change in a particular state vector.
∑=j
jjjr ρν (1)
where: νj- the stoichiometric coefficient [2]-[4], ρj- the kinematics equation.
The following kinematics equations describe the transformation in the ASM model:
(2)
(3)

(4)
(5)
(6)
(7)
(8)
(9)
(10)
(11)
The equation (2) determines the rate of increase oxygen assimilation of heterotro-
phy with the transformation of the ammonium as a source of nitrogen. This process is
limited by the availability of organic compounds resulting of maintaining of the sys-
tem a large number of microorganisms (directly proportional to the age of the sedi-
ment). Aerobic growth of heterotrophy (3) with the use of nitrates as a source of ni-
trogen is an alternative to the previous process. Linking between those processes
occurs in the absence of ammonium nitrogen in the zones by a factor , which
seeks to value of one at high concentrations of ammonium nitrogen. Limiting process
is associated with the availability of nitrate. Anoxic increase of heterotrophy (4) with
the assimilation of ammonium nitrogen occurs when oxygen concentration is close or
equal to zero. This process compared to oxygen (2) is slower which is expressed in
the equation by a constant .Anoxic increase of the heterotrophy (5), using nitrate as
nitrogen source take place in a anaerobic conditions or at a minimum concentration
of oxygen. The required condition is the availability of nitrate in the absence of am-
monium nitrogen. Oxygen autotroph growth is described by the equation (6). It is
limited by the concentration of ammonia nitrogen, alkalinity and dissolved oxygen. In

the process of dying heterotrophy (7), it is assumed that a part of the biomass is trans-
formed to the fraction - XP. The rest of it is convert to the slowly degradable com-
pounds XS, which contain organic nitrogen in suspension– XND. The equation (7) ex-
press the same process as in (1). The same fractions with the same stoichiometric
ratios are formed; the speed of the process is proportional to the concentration of mi-
croorganisms. Ammonification of the dissolved organic nitrogen (9) is carried out by
the heterotrophy with the speed proportional to the concentrations of organic nitrogen
and microorganisms. It results in the increase in alkalinity. The rate of hydrolysis of
organic compounds (10) is express by (11). The hydrolysis of organic nitrogen in
suspension is described by (12). Tables of the stoichiometric coefficient are provided
in [2]-[4].
3. THE NEURAL MODEL OF THE ASM1
4.1 FEEDFORWARD NEURAL-NETWORKS
A lot of different types of the neural networks can be found in the scientific papers
[9]-[10]. One of the most commonly-used is called a multi-layer perceptron. Networks
of this type are the construction of feed-forward type. It means that in this neural net-
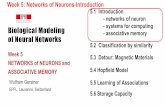
work there is one direction of flow of data between layers (Fig. 1). The structure of
the network includes interconnected neurons arranged in layers (input and the start-
ing-in, and hidden layers - with no direct connection to external signals). There are no
connections between neurons of the same layer. Layers are arranged in the pattern of
neural networks to each other in series, while the neurons in the layers are arranged in
parallel.

Fig. 2. The structure of the feed-forward neural networks
A single neuron carries out the operation of aggregation of input signals multiplied
by the corresponding weighting factors w. This value is determined in the learning
process. The result of this argument is the activation function. In the hidden layer of
the neural networks the bipolar sigmoidal activation function (hyperbolic tangent) is
used. In the output layer a linear functions are applied. The output signal of the indi-
vidual neuron is expressed by the following equation:
∑=
+=N
k
jkjkj wtxwfy1
0 ))(( (12)
)()( utghuf β= (13)
where: f – hypothetical activation function, wjk – weight coefficients, xk – input
signal, β- activation function correction coefficient, u – the argument of the activation
function, wj0 – the value of the bias,
In the case of the classical MLP network is often necessary to processing of input
data for linear scaling. The goal of such action is to adjust the input to the compart-
ments in which there is significant variation in activation function. This allows to
increase the efficiency of the obtained results. Effect of scaling the input vector to the
accuracy of the neural network in the wastewater treatment plant modelling has been
presented in the next part of the work.
4.2 SIMULATION RESULTS
The research with the for feed-forward neural networks with one hidden layer are

performed. As the activation function the hyperbolic tangent is adopted. The number
of neurons in the input and output layers depends on the dimensions of the learning
data. Input vector includes: parameters of flow, flow volume and the parameters of the
zone from the previous measurement (total 29). Also the dissolved oxygen level has
been assumed as know due to the fact that this variable is accessible in almost every
sewage treatment plant and can be considered us a control variable (in MPC algo-
rithm). The intensity of the flow is divided by the volume of the zone (195 m3). Dif-
ferent data has been used for the training and testing procedures. The data obtained
from the analytical model ASM1 has been down-sampling (every 100ts sample is
used). Neural networks used in the proposed models were trained using one of the
methods of gradient - Levenberg-Marquardt algorithm. Number of hidden neurons
and the number of iterations of the algorithm has been selected experimentally.
Firstly, the single neural network used to estimated all parameters of the ASM
model has been tested. The input data have been previously scaled in order to mini-
mise the relative difference between the variables of the system. The selected network
structure is (29-5-14). Number of the training period is 30.
a) b)
c) d)
e) f)

g) h)
i) j)
k) l)

i) j)
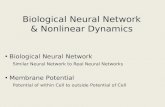
Fig. 3. The real and the estimated transients of the state variables and its estimation errors for the case
of single NN used to estimated all variables for the testing data
The transients of the real and estimated variables and the estimated errors is pre-
sented in Fig. 2. The application of the single NN to estimation all state variables of
the system is possible. As can be seen from the transients presented in Fig. 3. the neu-
ral estimator works in a stable way. However, due to the completely different behav-
iour of the selected state variables in some estimates the steady stay level of the error
is relatively high (especially in SS, SNH, SND, SO, SALK and XND). In order to minimise it,
the following modification has been proposed. The state variable has been divided
into two groups. The dynamic behaviour of particular variables has been used as the
criterion. The first group includes the following states: SS, SI, SNH, SNO, SND, SO, SALK,
XS and XI. The second group consists of the following states: XBH, XBA, XP, XND and
XMIN. The structure of the first an the second networks have the following structure
{29-12-9} and {29-4-5} respectively.
The transients of the state variables of the system as well as the estimation error in
the case of the application of the two separate estimators are presented in Fig. 4 (for
the testing data).

The used of the two parallel NN for the estimation of the state variables of the
ASM1system increase the accuracy of the neural models significantly. The level of
the errors of almost all variables decreased. For example for the variable SS the error
has been reduced from about 0.8 to almost 0 value.
a) b)
c) d)
e) f)

g) h)
i) j)
k) l)

i) j)
Fig. 4. The real and the estimated transients of the state variables and its estimation errors for the case
of two parallel NN used to estimated separate variables for the testing data
4. CONCLUSIONS
The characteristic property of the ASM1 model is its large computational effort. It
requires a relatively small step calculation to ensure its correct operation. An addi-
tional problem is its high dependence on the hard-identifiable parameters. These con-
straints of the ASM1 model lead designers to search for better models of biological
and chemical transformations. One of them are the neural models. The neural net-
works have the ability of generalization which allows the optimal modeling of proc-
esses in terms of parametric uncertainty. They can also work with the increased com-
putational step, which accelerates the execution of the simulation. Reduce the amount
of calculation is very important in the MPC control strategy. It requires the implemen-
tation of a series of calculations for various values of the control signals in a relatively
small unit of time. Reduce the complexity of the model enables the use of cheaper
computing unit which facilitates the implementation of the real object.
The neural models presented in the paper can be used in the MPC control struc-

ture. This control strategy allows the optimal way to control electrical blowers. This
enables reductions of the electrical energy consumed the sewage treatment plant and
the greater security of the crossing limits in the effluent. The future works will be
concern of the application of the designed neural networks in the MPC strategy. Also
the application of the different types of the neural networks (e.g. recurrent, neuro-
fuzzy) to model of the ASM1 will be investigated.
REFERENCES
[1] STARE A., VRECKO D., HVALA N., STRMCNIK S., Comparison of control strategies for nitro-
gen removal in an activated sludge process in terms of operating costs: simulation study, Water re-
search, vol. 41, pp 2004-2014, 2007.
[2] OLSSON G., NEWELL B., Wastewater Treatment Systems, Modeling, Diagnosis and Control
ISBN: 9781900222150, IWA Publishing, 1999.
[3] SZETELA R. W., Model dynamiczny oczyszczalni ścieków z osadem czynnym, Prace Naukowe
Instytutu Ochrony Środowiska Politechniki Wrocławskiej, Nr 64, Monografie, Nr 32, Wydawnictwo
Politechniki Wrocławskiej, Wrocław 1990
[4] URBAN R., Algorytmy genetyczne i sieci neuronowe w modelowaniu osadu czynnego, rozprawa
doktorska, Wrocław 2005 [5] MACIEJOWSKI J., Predictive control with constraints. Prentice Hall, 2002.
[6] BOROWA A., BRDYS M. A., MAZUR K., Modeling of wastewater treatment plant for monitoring
and control purposes by state-space wavelet networks, International Journal of Communications &
Control, vol. 2, pp 121-131, 2007.
[7] CINAR O., New tool for evaluation of performance of wastewater treatment plant: artificial neural
network, Process Biochemistry, vol. 40, pp 2980-2984, 2005.
[8] HENZE M., GRADY C. P. L. JR, MARAIS G. V. R., MATSUO T., Activated Sludge Model No. 1,
IAWPRC Scientific and Technical Reports No 1., IAWPRC, London. IWA Task Group on Mathe-
matical Modelling for Design and Operation of Biological Wastewater Treatment. London, Activated
sludge models ASM1, ASM2, ASM2D and ASM3, IWA Publishing, 2000.
[9] C. M. BISHOP, “Neural Networks for Pattern Recognition”, Oxford University Press, 1995.
[10] OSOWSKI S., Sieci neuronowe do przetwarzania informacji, Oficyna Wydawnicza Politechniki
Warszawskiej, Warszawa 2006.