· Symmetries of maps Contents 1 Homomorphisms of maps 2 2 Generalization to hypermaps, Walsh map...
46
Symmetries of maps Contents 1 Homomorphisms of maps 2 2 Generalization to hypermaps, Walsh map of a hypermap 3 3 Maps, hypermaps and groups 5 4 Product of regular hypermaps 9 5 Regular maps of large planar width and residual finiteness of triangle groups 11 6 Maps, hypermaps and Riemann surfaces 15 7 Enumeration of maps of given genus 17 8 Regular hypermaps on a fixed surface 22 9 Operations on maps and hypermaps, external symmetries of hypermaps 25 10 Lifting automorphisms of maps 28 11 Regular embeddings of graphs 30
Transcript of · Symmetries of maps Contents 1 Homomorphisms of maps 2 2 Generalization to hypermaps, Walsh map...

Symmetries of maps
Contents
1 Homomorphisms of maps 2
2 Generalization to hypermaps, Walsh map of a hypermap 3
3 Maps, hypermaps and groups 5
4 Product of regular hypermaps 9
5 Regular maps of large planar width and residual finiteness of triangle groups 11
6 Maps, hypermaps and Riemann surfaces 15
7 Enumeration of maps of given genus 17
8 Regular hypermaps on a fixed surface 22
9 Operations on maps and hypermaps, external symmetries of hypermaps 25
10 Lifting automorphisms of maps 28
11 Regular embeddings of graphs 30

1 Homomorphisms of maps
Let M1 = (D1; R1, L1) and M2 = (D2; R2, L2) be two oriented maps. A homomorphism ϕ :M1 →M2 of oriented maps is a mapping ϕ : D1 → D2 such that
ϕR1 = R2ϕ and ϕL1 = L2ϕ.
Analogously, a homomorphism ϕ : M1 →M2 of nonoriented mapsM1 = (F1; λ1, ρ1, τ1) and M2 = (F2; λ2, ρ2, τ2) is a mapping ϕ : F1 → F2 such that
ϕλ1 = λ2ϕ, ϕρ1 = ρ2ϕ and ϕτ1 = τ2ϕ.
2’
3’
1’
21
4 3
1 2
4’
4 3
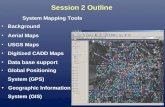
Figure 1: Cube smoothly covering its halved quotient in the projective plane.
The properties of homomorphisms of both varieties of maps are similar except that homo-morphisms of nonoriented maps ignore orientation. Every map homomorphism induces an epi-morphism of the corresponding monodromy groups. Indeed, it is not difficult to see that ifψ : (F1; λ1, ρ1, τ1) → (F2; λ2, ρ2, τ2) is a map homomorphism then the assignment λ1 7→ λ2,ρ1 7→ ρ2, τ1 7→ τ2 extends to an epimorphism ψ∗ called the induced epimorphism of the corre-sponding monodromy groups. Furthermore, transitive actions of the monodromy groups ensurethat every map homomorphism is surjective and that it also induces an epimorphism of the un-derlying graphs. Topologically speaking, a map homomorphism is a graph preserving branchedcovering projection of the supporting surfaces with branch points possibly at vertices, face centersor free ends of semiedges. Therefore we can say that a map M covers M if there is a homo-morphism M →M. A map homomorphism is smooth if it preserves the valency of vertices, thelength of faces and does not send a link or a loop onto a semiedge.
With map homomorphisms we use also isomorphisms and automorphisms. The automorphismgroup Aut(M) of an oriented map M = (D; R, L) consists of all permutations in the full sym-metry group S(D) of D which commute with both R and L. Similarly, the automorphism groupAut(M) of an nonoriented map M = (F ; λ, ρ, τ) is formed by all permutations in the symmetrygroup Sym(F ) which commute with each of λ, ρ and τ . Hence, in both cases the automorphismgroup is nothing but the centralizer of the monodromy group in the full symmetry group of thesupporting set of the map (cf. [91, Proposition 3.3(i)]).
Lemma 1.1 The action of the monodromy group of an (oriented) map M is transitive on theset of (darts) flags of M. The action of the map automorphism group is semiregular on the set of(darts) flags of M.
Since the action of the monodromy group Mon(M) is transitive, |Mon(M)| ≥ |D(M)| forevery oriented map M, and |Mon(M)| ≥ |F (M)| for every nonoriented map M. If the equality
2

is attained, then the monodromy group acts regularly on the supporting set, and therefore themap is called orientably-regular or regular , respectively. As it will become to be clear later theautomorphism group of an orientably regular map M acts regularly on darts of M, and similarlyAut(M) of a regular map M acts regularly on flags of M. Our use of the term regular map thusagrees with that of Gardiner et al. [62] and Wilson [200], but is not yet standard. For instance,Jones and Thornton [92] uses the term “reflexible”, and White [192] calls such maps “reflexiblesymmetrical”. On the other hand, our orientably regular maps are called “regular” in Coxeterand Moser [51], “symmetrical” in [21] and [192], and “rotary” in Wilson [200].
For each homomorphism ϕ : M1 → M2 of oriented maps there is the corresponding homo-morphism ϕ\ : M\
1 → M\2 defined by ϕ\(x, i) = (ϕ(x), i). If M1 = M2 = M, that is, ϕ is
an automorphism, then this definition and the assignment ϕ 7→ ϕ\ yield the isomorphic embed-ding of Aut(M) → Aut(M\). This allows us to treat Aut(M) as a subgroup of Aut\(M\) and,consequently, speak that every orientable regular map is orientably-regular (but not necessarilyvice versa). It is easy to see that the index |Aut\(M\) : Aut(M)| is at most two. If it is two,then the map M is said to be reflexible, otherwise it is chiral . In the former case, there is anisomorphism ψ of the map M = (D; R, L) with its mirror image (D; R
−1, L) called a reflection of
M. Clearly, ψ\ is an automorphism that extends Aut(M) to Aut\(M\). Topologically speaking,oriented map automorphisms preserve the chosen orientation of the supporting surface whereasreflections reverse it.
Transitivity of the action of the automorphism group of a regular (orientably regular) mapforces all the vertices to have the same valency and all the faces to have same size (covalency).We say that a map M has a type (p, q) if the covalency of every face is p and the valency of everyvertex of M is q for some integers p, q. Generally, we can define the type of a map to be thecouple (p, q) of integers, where p (q) is the least common multiple of covalencies (valencies) of thecovalencies (valencies) of faces (vertices) of M.
Homomorphisms between regular maps
Given homomorphism M → N between oriented maps more can be said if one of M, N , isa regular map. Let G ≤ Aut(M) = (D; R, L) be a subgroup of the automorphism group ofan oriented map. For any x ∈ D denote [x] the orbit in the action of G containing x. SetR[x] = [Rx], L[x] = [Lx] for any x ∈ D and denote D = [x]; x ∈ D. Then M = (D; R, L) isa well defined oriented map and the natural assignment x 7→ [x] defines a map homomorphismM→ M. Homomorphisms arising in the above way are called regular, the group G ≤ Aut(M)is called the group of covering transformations.
The following statement comes from [140].
Proposition 1.2 Let ϕ : M→ N be a map homomorphism. If M is regular then ϕ is regular.In particular, any homomorphism between regular maps is regular, and moreover, in this case thegroup of covering transformations is a normal subgroup of Aut(M).
2 Generalization to hypermaps, Walsh map of a hypermap
A topological hypermap H is a cellular embedding of a connected trivalent graph X into a closedsurface S such that the cells are 3-colored (say by black, grey and white colours) with adjacentcells having different colours. Numbering the colours 0, 1 and 2, and labeling the edges of Xwith the missing adjacent cell number, we can define 3 fixed points free involutory permutationsri, i = 0, 1, 2, on the set F of vertices of X; each ri switches the pairs of vertices connectedby i-edges (edges labeled i). The elements of F are called flags and the group G generated by
3

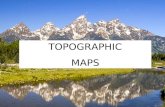
r0, r1 and r2 will be called the monodromy group1 Mon(H) of the hypermap H. The cells of Hcolored 0, 1 and 2 are called the hypervertices, hyperedges and hyperfaces, respectively. Since thegraph X is connected, the monodromy group acts transitively on F and orbits of 〈r0, r1〉, 〈r1, r2〉or 〈r0, r2〉 on F determine hyperfaces, hypervertices and hyperedges, respectively. The order ofthe element k = ord(r0r1), m = ord(r1r2) and n = ord(r2r0) is called the valency of a hyperface,hypervertex and hyperedge, respectively. The triple (k,m, n) is called type of the hypermap.
(a) (b)
Figure 2: Regular embedding of the Fano plane in the torus gives rise to a regular hypermap oftype (3, 3, 3).
Maps correspond to hypermaps satisfying condition (r0r2)2 = 1, or in other words, mapsare hypermaps of type (p, q, 2) or of type (p, p, 1). Thus we can view the category of Maps as asubcategory of the category of Hypermaps which is formed by 4-tuples (F ; r0, r1, r2), where ri (i =0, 1, 2) are (fixed points free) involutory permutations generating the monodromy group Mon(H)acting transitively on F . Similarly, the category of Oriented Hypermaps arises by relaxing thecondition L2 = 1 in the definition of an oriented map. More precisely, an oriented hypermapis a 3-tuple (D; R,L), where R and L are permutations acting on D such that the orientedmonodromy group is transitive on D. The notions defined in the previous section extend frommaps to hypermaps in an obvious way. For more information on hypermaps the reader is referredto [48].
The modified Euler formula for hypermaps reads as follows.
Theorem 2.1 (Euler formula for hypermaps) Let H = (F ; r0, r1, r2) be a hypermap on a closedsurface S of genus g having v hypervertices, e hyperedges and f hyperfaces. Then
(i) v + e + f − |F |/2 = 2− 2g, if S is orientable,
(ii) v + e + f − |F |/2 = 2− g, if S is nonorientable.
Walsh representation
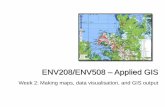
An important and convenient way to visualize hypermaps was introduced by Walsh in [189].Topologically, a map can be seen as a cellular embedding of a graph in a closed surface and ahypermap as a cellular embedding of a hypergraph in a closed surface. Since hypergraphs are ina sense bipartite graphs (with one monochromatic set of vertices representing the hyperverticesand the other monochromatic set of vertices representing the hyperedges) a hypermap can beviewed as a bipartite map, as well. In fact, given any topological hypermap H we can constructa topological bipartite map W (H), called the Walsh bipartite map associated to H by taking
1This group has been called the monodromy group of H [96, 150], the connection group of H [200] and theΩ-group of H [26].
4

first the dual of the underlying 3-valent map and then deleting the vertices (together with theedges attached to them) lying inside the hyperfaces of H. The resulting map is bipartite with onemonochromatic set of vertices lying on the faces colored black, representing the hypervertices ofH, and the other monochromatic set lying on the faces colored grey, representing the hyperedges.
Figure 3: The Walsh map of the Fano plane embedding.
This construction can be reversed: given any topological bipartite map B, where the verticesare bipartitioned in black and grey, we construct an associated topological hypermap W−1(B) =Tr(B∗) by truncating the dual map B∗; the faces of the resulting 3-valent map Tr(B∗) containsthe vertices and the face-centres of the original map and are henceforth 3-colorable black, greyand white, with all these colours meeting at each vertex of Tr(M∗). If B = W (H) is the Walshbipartite map of an oriented hypermap H = (D; R, L) then R and L are the respective rotationson the two bipartition sets of the dart set of B, so the rotation of B is RL = LR.
3 Maps, hypermaps and groups
Schreier representations
In the previous section we have seen that maps and hypermaps can be represented by means oftwo or three permutations satisfying some conditions. The aim of this section is to show thatone can study hypermaps as purely group theoretical objects. The idea emerges from the factthat every transitive permutation group is equivalent to a group acting on cosets by translation.Following [183, 184], we call these representations Schreier representations.
Schreier representations of oriented maps appear implicitly in Jones and Singerman [91]. Vince[183] developed a theory of Schreier representations of (hyper)maps on closed surfaces describedby three involutions. Here we introduce Schreier representations of oriented hypermaps.
Let G be a finite group generated by two elements r and `. In other words, G is a finite quotientof some triangle group T+(k, m, n) = 〈r, `; `n = rm = (r`)k = 1〉. k,m and n being positiveintegers. Further let S be a subgroup of G. Using the action of G on the set C = G/S of leftcosets of S in G by the left translation, we construct a hypermap A(G/S; r, `) whose monodromygroup is a homomorphic image of G and the local monodromy group is a homomorphic image ofS. We take the cosets as darts of the hypermap and define the rotation R and the dart reversinginvolution L by setting
R(hS) = rhS, (1)L(hS) = `hS, (2)
respectively, hS being an arbitrary element of C. For the resulting hypermap (C; R,L) =A(G/S; r, `) we easily check that the assignment r 7→ R, ` 7→ L extends to a homomorphismT+(k, m, n) → Mon(A(G/S; r, `)).
5

Let H be a hypermap. A Schreier representation of H is an isomorphism H → A(G/S; r, `)for an appropriate group G = 〈r, `〉 and a subgroup S ≤ G, or simply the hypermap A(G/S; r, `)itself. Given any hypermap H = (D; R, L), it is not difficult to find a Schreier representation forH. Indeed, we first fix any dart a of H and set G = Mon(H) = 〈R, L〉 and S = Mon(H, a), tobe the stabilizer of a. Then, for an arbitrary dart x we take any element h ∈ H with h(a) = xand label x by the coset hS ∈ C, thereby obtaining a labeling α(x) = hS. Observe that α iswell-defined since for any two elements h and h′ of Mon(M) with h(a) = x = h′(a) we havehS = h′S. In fact, α is a bijection of D(H) onto C. Clearly, α(Rx) = Rα(x) and α(Lx) = Lα(x)which means that α : H → A(G/S; R,L) is the required isomorphism.
If we start from a given hypermap H, the Schreier representation we have just described is insome sense best possible because the monodromy group Mon(H) is not merely a homomorphicimage of G but is actually isomorphic to it. In this case we say that the Schreier representation iseffective. In general, a Schreier representation A(G/S; r, `) is effective if and only if G acts faith-fully on C, i.e., the translation by every non-identity element of G is a non-identity permutationof C. Elementary theory of group actions or straightforward computations yield that the latteroccurs precisely when the subgroup
⋂h∈G
hSh−1, the core of S in G, is trivial (cf. Rotman [160]).
For an arbitrary Schreier representation A(G/S; r, `) of a hypermap H we have Aut(H) ∼=NG(S)/S, where NG(S) is the normalizer of S in G (see Proposition 3.7 in [50]). In particular,if H is orientably regular we can take G = Mon(H) and S = 1. Then Aut(A(G/1; r, `)) ∼= G ∼=Mon(A(G/1; r, `)), implying that Aut(H) ∼= Mon(H). Let us remark that the above isomorphismassigns the left translation by an element h ∈ G (representing a monodromy of H) to the righttranslation ξh (representing an automorphism of H). Summing up we get the following theorem.
Theorem 3.1 Let H = (D; R, L) be an oriented hypermap. Then |Aut(H)| ≤ |D| ≤ |Mon(H)|and the following conditions are equivalent:
(i) H is orientably regular,
(ii) Mon(H) ∼= Aut(H),
(iii) the action of Aut(H) on D is regular.
In order to get a similar characterization of regular (nonoriented) hypermaps it suffices to replace,in the above statement, an oriented hypermap by a hypermap and darts by flags.
Schreier representations provide a convenient tool to deal not only with automorphisms butalso with homomorphisms between hypermaps. If
G = 〈r, `; `n = rm = (r`)k = 1, . . . 〉
is a finite quotient of the triangle group T+(k, m, n) and S ≤ S′ ≤ G are two subgroups then thenatural projection π : G/S → G/S′, hS 7→ hS′ (h ∈ G), is a homomorphism A(G/S; r, `) →A(G/S′; r, `). In fact, every hypermap homomorphism ϕ : H1 → H2, where Hi = (Di; Ri, Li), isin the usual sense equivalent to an appropriate natural projection.
Generic hypermap
One consequence of these considerations is that every oriented hypermap is a quotient of a (finite)oriented regular hypermap. In fact, for every oriented hypermap H = (D; R, L) there exists aregular hypermap H# and a homomorphism π : H# → H with the following universal property:
6

for every regular hypermap H and a homomorphism ϕ : H → H there is a homomorphismϕ′ : H → H# such that ϕ = πϕ′. In terms of Schreier representations, the homomorphism π isequivalent to the natural projection A(G/1; R, L) → A(G/S;R,L) ∼= H where G = Mon(H) andS = Mon(H, a), is the stabilizer of some dart a ∈ D(H). We shall call the hypermap H# thegeneric regular hypermap over H and π : H# → H the generic homomorphism. It is obvious thatthe induced homomorphism π∗ : Mon(H#) → Mon(H) is an isomorphism and that H# and Hhave the same type.
Construction of generic hypermap
To construct the generic hypermapH# = (D#; R#, L#) for an oriented hypermapH = (D; R, L)it is sufficient to set D# = Mon(H), R#(x) = Rx, and L#(x) = Lx for any x ∈ D#. Observethat the automorphisms of H# are just the right translations of D# = Mon(H) by the elementsof Mon(H), and so H# is indeed an orientably-regular hypermap. Similarly, if H = (F ; λ, ρ, τ)is an nonoriented hypermap then the generic regular hypermap H+ = (F+; λ+, ρ+, τ+) over Hcan be constructed by setting F+ = Mon(H), λ+(x) = λx, ρ+(x) = ρx and τ+(x) = τx, for anyx ∈ F+. Again, the hypermap automorphisms are given by the right translations of F+ by theelements of Mon(H) = F+.
It is obvious that if H is orientable, then so is H+. Moreover, the hypermap H+, as atopological hypermap, smoothly covers (H#)\.
In the following sections we shall see that maps or Walsh bipartite hypermap representationscombined with the generic hypermap construction provide a convenient tool for constructionregular hypermaps satisfying certain constrains (see for instance [90, 151]). Let us note thatthere is an interesting relationship between hypermaps and algebraic curves ( see Section 5). Viathis relationship, actions of Galois groups of algebraic number fields on maps on surfaces areinvestigated (see [71, 96, 95, 165]). In this context the base maps are (following Grothendieck)called dessigns d’enfants.
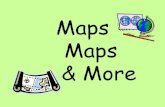
Example 3.2 Figure 4 shows spherical maps M1, . . .M5 which generic maps are the five Pla-tonic solids. The respective (oriented) monodromy groups are A4, S4, S4, A5 and A5. Dessignd’enfants M6 and M7 represent regular maps on surfaces with higher genera. The associatedmonodromy groups are the projective linear group PSL(2, 7) and Mathieu group M12, respec-tively. The generic map M#
6 is known as the dual of the Klein’s triangulation of the surface ofgenus 3 and this map is the smallest Hurwitz map (see the following Section).
Maps and hypermaps from triangle groups
The above theory of Schreier representations apply without any problem to infinite hypermapsas well. It follows that oriented maps and hypermaps of given type (k, m, n) can be describedas quotients of the universal oriented hypermap of type (k, m, n) which (oriented) monodromygroup is T+(k, m, n). This is the even-word subgroup of the triangle group
T (k,m, n) = 〈r0, r1, r2; r20 = r2
1 = r22 = (r1r2)k = (r0r1)m = (r2r0)n = 1〉,
which is the monodromy group of the universal hypermap A(T (k, m, n); r0, r1, r2) for the categoryof (nonoriented) hypermaps of type (k,m, n). It follows that
T+(k,m, n) = 〈R, L; (RL)k = Ln = Rm = 1〉.
7

M4
M3M2M1
M5
M6 M7
Figure 4: Dessign d’enfants
Note that the universal maps of type (k, m) with the monodromy group T (k, m, 2) are the wellknown tessellations of the sphere, plane or hyperbolic plane by k-gons (m of them meeting ateach vertex) provided the expression 1
k + 1m is greater, equal or less than 1
2 , respectively. It iswell-known that a free 2-generator group can be represented as a matrix-group [159, pages 48-49].Denote by ν = 2cos(π/k), η = 2cos(π/m) and ξ = 2cos(π/n). Set
r =
1 ξ νξ + η0 −1 −ν0 ν ν2 − 1
(3)
` =
−1 −ξ 0ξ ξ2 − 1 0η ηξ + ν 1
. (4)
Then the assignment R 7→ r and L 7→ ` extends to a group monomorphism. Hence triangle groupsare matrix groups, see [171, 172, 1] for more details. It follows that (hyper)maps can viewed asquotients of certain matrix groups, while regular (hyper)maps correspond to factor groups of thematrix groups representing the respective triangle groups. This approach to maps and hypermapsis used to study regular maps and hypermaps of large planar width, see Section 5.
Hypermap subgroups
We can go even one step further. Let us denote by
G = T (∞,∞,∞) = 〈r0, r1, r2; r20 = r2
1 = r22 = 1〉,
the free product of three two-element groups. Since the monodromy group of any hypermapH is afinite quotient of G we can identify every hypermap with the algebraic hypermap A(G/S; r0, r1, r2)for some S ≤ G of finite index. The subgroup S is called the hypermap subgroup. Consequently,one can study hypermaps via the subgroups of G of finite index. The facts listed in the followingstatement are well-known between map- and hypermap experts (see [48, 50]).
8

Theorem 3.3 Let H, H1 and H2 be hypermaps, and let G = 〈r0, r1, r2; r20 = r2
1 = r22 = 1〉.
(a) H1 covers H2 if and only if there are S1 ≤ S2 ≤ G such that H1∼= A(G/S1; r0, r1, r2) and
H2∼= A(G/S2; r0, r1, r2),
(b) H1∼= H2 if and only if the corresponding hypermap subgroups are conjugate in G,
(c) H is orientable if and only if its hypermap subgroup is contained in the even-word subgroupG+ ≤ G,
(d) the hypermap subgroup of the nonoriented generic hypermap for a hypermap given by hyper-map subgroup S ≤ G is the largest normal subgroup contained in S. In particular, regularhypermaps correspond to normal subgroups of G.
Using the algebraic representation via hypermap subgroups one can handle many problems. Forinstance, it is straightforward that given two hypermaps H1, H2 with the respective subgroupsS1, S2, the intersection S1 ∩ S2 defines the smallest common cover for both H1 and H2. Becauseof many advantages the investigation of maps and hypermaps via the corresponding hypermapsubgroups posses, sometimes a hypermap itself is identified with its hypermap subgroup (see[15, 61]).
Problems:
1. Using the construction of a generic map find orientably regular 3-valent maps which facesare bounded by walks of lengths 7,8,9 and 10.
2. Given groups H ≤ G and a set of generators x1, . . . , xk closed under inverses we define aSchreirer graph to be the graph whose vertices are left cosets of H and hH is joined by an edgecoloured by xi, i ∈ 1, . . . k to gH if and only if gH = xihH. A Schreier representation of a mapis a cubic Schreier graph.
Prove that any bridgeless cubic graph can be viewed as a Schreier representation of a map.
3∗. Find non-isomorphic oriented maps whose graph of a Schreier representation is isomorphicto the Petersen graph. Determine the genera of the generic regular covers of them.
4∗. Prove Theorems 3.1 and 3.3.
4 Product of regular hypermaps
The smallest common cover of given hypermaps H1 = (F1; r0, r1, r2) and H2 = (F2; q0, q1, q2)can be viewed as a product of two hypermaps. The question arises whether we can constructthe product explicitly, or in other words, can we derive the monodromy group of the product interms of the monodromy groups of factors? The most natural approach is to set F = F1 × F2
and pi(x, y) = (rix, qiy) for any (x, y) ∈ F and i = 0, 1, 2. Unfortunately, the hypermap H =(F ; p0, p1, p2) is, in general, not correctly defined since the action of Mon(H1) ×Mon(H2) maynot be transitive on F . Necessary and sufficient condition ([33, 25]) follows.
Theorem 4.1 [33] Let H1, H2 be hypermaps with the hypermap subgroups S1 and S2. Then themonodromy group of the smallest common cover for H1, H2 is the direct product Mon(H1) ×Mon(H2) if and only if T (∞,∞,∞) = 〈S1, S2〉.
The above theorem deals with a special instance of a general situation. Let H = U/H andK = U/K be algebraic hypermaps. Set H ∨ K = U/(H ∩ K) and H ∧ K = U/〈H, K〉. Thehypermaps H ∨ K, H ∧ K will be called join and intersection of H and K, respectively. If
9

both hypermaps are regular then the hypermap subgroup is unique and join and intersection arewell-defined binary operators in the category of regular hypermaps. Joins and intersections arestudied in [29]. Join and intersection of regular hypermaps can be constructed using the followingoperation introduced by Wilson in [203].
Let A = 〈r0, . . . , rk〉 and B = 〈s0, . . . , sk〉 be two k-generated groups. Let us define theirmonodromy product A×m B to be the subgroup of the direct product generated by (ri, si), wherei = 0, 1, . . . , k. Note that S. Wilson calls it the parallel product in [203]. Further, denote byπ1 : A ×m B → A, π2 : A ×m B → B the natural projections erasing the second and firstcoordinate, respectively. The following theorem relates the above operations.
Theorem 4.2 [29] Let H = (A; r0, r1, r2) and K = (B; s0, s1, s2) be regular hypermaps. ThenMon(H ∨K) = Mon(H)×m Mon(K) and Mon(H ∧K) = Mon(H)×m Mon(K)/Ker π2Ker π1.
Two regular hypermaps H, K will be called orthogonal if the respective hypermap subgroupsgenerate T (∞,∞,∞) = 〈H, K〉. It follows that orthogonality of hypermaps is the necessaryand sufficient condition under which the monodromy product is simple the direct product ofthe monodromy groups of factors. Joins and intersections of maps and hypermaps allow us toconstruct maps and hypermaps satisfying some special properties, for instance, self-dual or totallyself-dual hypermaps, reflexible hypermaps. These operations play an important role in the studyof the phenomenon of chirality which we are going to deal with in the next paragraph.
Chirality index
Orientable hypermaps split into two families: family of reflexible and family of chiral hypermaps.Reflexible hypermap is mirror symmetric which means that the two associated oriented hyper-maps (D; R, L) and (D; R−1, L−1) are isomorphic. Topologically speaking, a reflexible hypermapadmits an orientation reversing self-homeomorphism of the supporting surface preserving the em-bedded graph and colours of faces. Note that S. Wilson [196] and some other authors use theterm reflexible to denote (reflexible) regular hypermap. An orientable hypermap which is notreflexible is chiral (or mirror asymmetric).
Figure 5: The smallest chiral orientably regular map is toroidal 4, 42,1
From the first point of view the “chirality” seems to be a binary invariant for the categoryof orientable hypermaps. Surprisingly, it turns out [32] that one can measure by a group, calledthe chirality group of a hypermap, of how much given orientable hypermap deviates from beingmirror symmetric. For the simplicity let us restrict to orientably regular hypermaps now. Let us
10

denote by H∆ the largest (reflexible) regular hypermap covered by H and by H∆ the smallest(reflexible) regular hypermap covering H. It follows that H∆ = H ∨ Hr and H∆ = H ∧ Hr,where Hr denotes the mirror image of H. With the help of hypermap subgroup representationthe following result is proved in [32].
Theorem 4.3 [32] Let H be an orientably regular hypermap. Then there exists a finite groupG = X(H) of size κ such that H∆ is a smooth κ-fold cover of H, and H is a κ-fold cover of H∆.Moreover, both coverings are regular, with groups of covering transformations isomorphic to G.
The above defined group X(H) is called the chirality group while its size κ is the chiralityindex. It follows that X(H) is trivial if and only if H is reflexible. Structure of chirality groupsis studied in [32] in a more detail. It is proved there that every abelian group is the chiralitygroup of an oriented regular hypermap. On the other hand, many non-abelian groups includingsymmetric groups and dihedral groups cannot serve as chirality groups.
Two-generator groups
Finite groups generated by two involutions coincide with dihedral groups. Any finite 2-generatorgroup can be interpreted as a monodromy group of a regular oriented hypermap, while groupsgenerated by three involutions give rise to (nonoriented) regular hypermaps. A lot of finite groupsbelong to one or to the other above mentioned classes of groups. The following related problemcan be found in the Kourovka notebook.
Problem 4.1 [114, Problem 7.30] Characterize the finite simple groups generated by three invo-lutions, two of which commute.
Note that a regular map (F ;λ, ρ, τ) with a simple monodromy group is necessarily non-orientable.A similar problem was considered by Malle, Saxl and Weigel [134]. They proved that every non-abelian simple group can be generated by two elements, one of them being of order two. In otherwords, every non-abelian simple group is a monodromy group of some oriented regular map.Interesting problem of classification of all possible couples R,L (L2 = 1) of generators (up to theaction of Aut(G)) for a given group G arises. Having in mind the above result, the solution of theproblem for the class of (finite) simple groups means to prove a refinement of the classification ofsimple groups. Although, in general this problem seems to be intractable, at least for some groupsit can be solved, see for instance Sah [161]. Moreover, using the Hall’s counting principle [75] onecan calculate the number of nonisomorphic pairs of generators in terms of group characters (see[59, 93]). Regular hypermaps which monodromy coincide with the monodromy groups of the fivePlatonic solids are classified in [27]
Problems:
1. Determine terms of rotations an orientably regular self-dual map of type 5, 5.2. Find a regular map which is in the same time self-Petrie and self-dual.
3. Is there a cubic regular toroidal and self-Petrie map?
4∗. Show that the chirality index of a regular hypermap can be arbitrarily large.
5 Regular maps of large planar width and residual finiteness oftriangle groups
While regularity (in either arithmetical or group-theoretical sense) is an obvious property of anygeneralization of the Platonic solids, it is somewhat less obvious whether or how their planarity
11

should be generalized. The idea is to replace the global planarity of the Platonic solids by a certainlocal variant of this notion. This should guarantee that a sufficiently “large” neighbourhood ofeach face is simply connected. Recent works in topological graph theory (cf. [145, 157, 158,179]) suggest the following concept as a convenient measure of local planarity. A map M ona closed surface S other than the 2-sphere is said to have planar width at least k, w(M) ≥ k,if every non-contractible simple closed curve on S intersects the underlying graph of M in atleast k points. Planar width (most often called “face-width” or “representativity”) has recentlyreceived a considerable attention as an important tool for the study of graph embeddings onsurfaces [146, Chapter 5]. The following theorem presents the main result of [151]. Its proofconsists in construction of a certain planar map Mw(p, q) of type (p, q) for which the generic mapconstruction applies.
Theorem 5.1 [151] For every pair of integers p ≥ 3 and q ≥ 3 such that 1/p + 1/q ≤ 1/2 andfor every integer k ≥ 2 there exists an orientable regular map M of type (p, q) with planar widthw(M) ≥ k. Moreover, we can require the map M to be reflexible.
This theorem has several predecessors in the literature.
Grunbaum’s problem
In 1976, Grunbaum [72] asked if for every pair of positive integers p and q with 1/p + 1/q < 1/2(i.e., in the hyperbolic case) there are infinitely many finite regular maps of type (p, q). He alsoremarked, however, that it was not even known whether for such p and q there was at least onemap of that type. The question was answered in the affirmative by Vince [184] (1983) within amore general framework of higher-dimensional analogues of regular maps. His proof, based ona theorem of Mal’cev saying that every finitely generated matrix group is residually finite (see,e.g., Kaplansky [103]), was non-elementary and non-constructive. Constructive proofs of Vince’stheorem were subsequently given by Gray and Wilson [63] and Wilson [199, 202] along with somerefinements. Further constructions of regular maps of each type (p, q) have recently been given byJendrol’ et al. [90] and Archdeacon et al. [6]. Perhaps the most elementary affirmative solutionof the Grunbaum’s problem is obtained in [90] giving the dessing’s d’enfants for each hyperbolictype (p, q) and deriving the respective generic covering maps, see Figure 6, where p = qt + r, forsome 0 ≤ r < q and t ≥ 1.
Parallel to this development there is another line of research which is closely related to ourmain theorem. The bridge between the two streams is the observation that an orientable regularmap of type (p, q) exists if and only if there is a finite group with presentation G = 〈x, y; xq = y2 =(xy)p = 1, . . . 〉 forming the oriented monodromy group of the oriented regular map A(G; x, y).With this relationship in mind, the solution of the above Grunbaum’s (p, q)-problem can bederived from an old result (1902) of Miller [144] (rediscovered by Fox [60] in 1952) which states:
Theorem 5.2 (Miller [144]) For any three integers p, q, and n, all greater than 1, there existinfinitely many pairs of permutations α, β such that α has order p, β has order q, and αβ hasorder n, except that the three numbers are 2, 3, 3 or 2, 3, 4 or 2, 3, 5 (ordered arbitrarily) or two ofthe numbers are 2.
In the latter cases, the triples determine the groups uniquely: they are the tetrahedral, theoctahedral and the dodecahedral group, and the dihedral groups.
12

p−2
p−2
r
q−r
r
q−r−1q−2q−2q−2q−1
a) b)
c)
Figure 6: Dessigns d’enfants of hyperbolic types
Hurwitz maps
The special case where p = 7, q = 3 and n = 2 (or its dual, with the roles of p and q interchanged)was an object of an extensive research in the area of Fuchsian groups, hyperbolic geometry andRiemann surfaces originating from the famous theorem of Hurwitz (1893):
Theorem 5.3 (Hurwitz’s Theorem) For any Riemann surface S of genus g ≥ 2, the number ofits automorphisms (that is, conformal homeomorphisms) does not exceed 84(g − 1).
The Hurwitz bound is attained precisely when Aut(S) is a Hurwitz group, a finite group Ggenerated by an element x of order 3 and an element y of order 2 whose product has order 7.As mentioned above, such a group gives rise to a regular map of type (7, 3) on S, a (trivalent)Hurwitz map, whose automorphism group is isomorphic to G. In this context, the fact that thereare infinitely many Hurwitz groups was first established by MacBeath in 1969 [128]. More recentresults on Hurwitz maps one can find in [39] where all Hurwitz groups giving rise to reflexibleregular maps of type (7, 3) and of genus < 11, 905 are classified.
An interesting problem considered by Conder and others reads as follows:
Problem. Which simple groups are Hurwitz groups?
It transpires that except for a finite family of alternating groups the answer was done in aserie of articles, see [38, 40, 44] for instance.
Let us note that MacBeath’s theorem immediately follows from Vince’s theorem which in turnis a consequence of Theorem 5.1. Indeed, it is sufficient to take an infinite sequence of regular
13

Figure 7: Barycentric subdivision of the universal Hurwitz map
maps of any type (p, q) (in particular, (7, 3)) with increasing planar width. Thus Theorem 5.1has the following two corollaries:
Theorem 5.4 (Vince [184]) For any pair of integers with p ≥ 2, q ≥ 2 and 1/p + 1/q ≤ 1/2there exist infinitely many orientable regular maps of type (p, q).
Theorem 5.5 (MacBeath [128]) There exist infinitely many Hurwitz groups.
Residual finiteness of triangle groups
Another notable consequence of Theorem 5.1 is of group-theoretic nature. Let T+(p, q, 2) be theoriented triangle group with presentation 〈x, y; xq = y2 = (xy)p = 1〉. Then for any integerw ≥ 1 there exist infinitely many finite quotients H of T+(p, q, 2) such that in any presentationof H in terms of x and y all reduced identities that are not identities of T+(p, q, 2) have lengthgreater than w. The latter sentence is nothing but a reformulation of the well-known fact thattriangle groups T+(p, q, 2) are residually finite [103]. A group G is called residually finite if foreach element g ∈ G there exists a finite quotient H of G such that the epimorphism G → H doesnot send g onto the identity. Furthermore, as it was already mentioned the group T+(p, q, 2) isisomorphic to the even-word subgroup of the full triangle group T (p, q, 2) = 〈x, y, z; x2 = y2 =z2 = (xy)p = (yz)2 = (xz)q〉. Hence, by using Theorem 5.1 (as well as its nonoriented version)we deduce the following corollary (See also [172, 173].)
Theorem 5.6 For each pair of integers p and q such that 1/p + 1/q ≤ 1/2 both the oriented andthe full triangle group T+(p, q, 2) and T (p, q, 2) are residually finite.
As was noted, Vince [184] proved Grunbaum’s conjecture by employing the residual finitenessof triangle groups. In contrast, we have just shown that Theorem 5.1 implies both Vince’s theorem
14

and the residual finiteness of triangle groups. In fact, the residual finiteness of triangle groups isequivalent to Theorem 5.1.
It is well known (see [79, 127, 162]) that the fundamental groups of closed surfaces are resid-ually finite. Alternatively, this can be proved by using Corollary 12 and observing that everyfundamental group of a closed surface embeds into some triangle group T (p, q, 2). A natural wayto make see that the fundamental group of a given surface embeds into a triangle group T (p, q, 2)is to try to construct a map of type (p, q) supported by S. For instance, if the surface is orientableof genus g one can take p = 4g = q. In [90, 151, 172, 173] one can find further applications ofTheorem 5.1.
The constructions of regular maps of large planar width based on construction of generic mapsover some planar maps produce maps with enormously large size. Generalizing the works of Siran[172, 173], Abas [1] proved the following statement giving much better bounds. It represents thestrongest result related to residual finiteness of triangle groups.
Theorem 5.7 Let 1/k + 1/m + 1/n < 1. Then for every w ≥ 1 there exists a regular orientedhypermap (D; R, L) with planar width at least w such that the |D| ≤ Cw, where C = C(k,m, n) <29kmn((k2+m2+n2)−(k+m+n)+3).
6 Maps, hypermaps and Riemann surfaces
The aim of this section is to explain briefly the relationship between hypermaps and Riemannsurfaces. Following the approach of Jones [96] we firstly show that any hypermap can be endowedwith the structure of Riemann surface. A natural question arises: What kind of Riemann surfacesare associated with hypermaps? Surprisingly beautiful answer [96] is a consequence of the theoremof Belyı [11]. In what follows we have extracted some ideas from [96] where one can find moredetailed information as well as an exhaustive list of relevant references.
A Riemann surface is a surface with locally-defined complex coordinates, such that the changesof coordinates between intersecting neighbourhoods are conformal. The the upper half-plane U = z ∈ C | Im z > 0 , and the Riemann sphere (or complex projective line) Σ = P 1(C) = C∪ ∞are examples of simply-connected Riemann surfaces.
The upper half-plane is a model of hyperbolic geometry, the geodesics being the euclidean linesand semi-circles which meet the real line R at right-angles. The modular group Γ = PSL2(Z),consisting of the Mobius transformations
T : z 7→ az + b
cz + d(a, b, c, d ∈ Z, ad− bc = 1),
acts on U as a group of orientation-preserving hyperbolic isometries. It is well-known (see forinstance [96]) that modular group is a free group of rank 2. Hence it can serve as a universalcovering group for the set of monodromy groups of oriented hypermaps which are two-generatorgroups. In order to get a representation of a hypermap by means of a Riemann surface one hasto embed the underlying graph of the universal Walsh bipartite map into U in the “right way”.This can be done provided we extend U as follows. Observe that Γ acts (transitively) on therational projective line P 1(Q) = Q ∪ ∞, and hence it acts on the extended hyperbolic plane
U = U ∪Q ∪ ∞ .
Let us denote by[0] = a
b∈ Q ∪ ∞ | a is even and b is odd ,
15

[1] = a
b∈ Q ∪ ∞ | a and b are both odd .
The subgroup stabilizing both [0] and [1] is
Γ(2) = T ∈ Γ | b ≡ c ≡ 0 mod (2) .
The universal (Walsh) bipartite map B on U has [0] and [1] as its sets of black and whitevertices, and its edges are the hyperbolic geodesics between vertices a/b and c/d where ad− bc =±1; this implies that a and c have opposite parity, so the map is indeed bipartite.
The automorphism group of B (preserving orientation and colours) is Γ(2). This is a freegroup of rank 2, freely generated by
R : z 7→ z
−2z + 1and L : z 7→ z − 2
2z − 3.
It follows that if B is any bipartite map, representing an oriented hypermap H with monodromygroup G = 〈R, L〉, then there is an epimorphism
Γ(2) → G, R 7→ R, L 7→ L ,
giving a transitive action of Γ(2) on the set E of edges of B. The stabilizer of an edge in thisaction is a subgroup B of index N = |E| in Γ(2), called the map subgroup corresponding to B(different choices of an edge lead to conjugate subgroups). Since B ≤ Γ(2) = Aut(B), one canform the quotient map B/B isomorphic to B. In particular, the oriented hypermap H is regular ifand only if B is normal in Γ(2), in which case Aut(H) ∼= Γ(2)/B ∼= G. Note that the above mapsubgroup B can be viewed as an oriented version of the hypermap subgroup introduced above.
1/5 1/3 2/50−1/5−1/3 3/5 2/3 4/5 1 6/5 4/3
Figure 8: Universal hypermap on the extended upper-half plane.
Using the above factorization process we end with an isomorphic copy of our original Walshbipartite map B, endowed with some extra structure. The underlying surface is now a compactRiemann surface X = U/B, in which the underlying graph is very rigidly embedded: the edgesare all geodesics, the angles between successive edges around a vertex are all equal, and theautomorphisms of B are all conformal automorphisms of U/B (induced by the action of NΓ(2)(B)on B).
Clearly, we can represent the trivial bipartite map on the Riemann surface Σ with one blackvertex at 0, one white vertex at 1, and the unique edge joining them as the interval [0,1]. LetB∞ denotes this representation. Since any bipartite map covers B∞, alternatively, one can derivethe structure of Riemann surface associated with B by considering the branched regular coveringB ∼= B/B → B1
∼= B/Γ(2) given by the inclusion B ≤ Γ(2).
Riemann surfaces and algebraic curves
If A(x, y) ∈ C[x, y] is a polynomial in x and y with complex coefficients, then the equationA(x, y) = 0 defines the complex variable y as an N -valued function of the complex variable x,where N is the degree of A in y. Consequently, the Riemann surface XA of this equation can be
16

constructed by taking N copies of the Riemann sphere Σ (one for each branch of the function),cutting them between the branch-points, and then rejoining the sheets across these cuts.
A Riemann surface is called algebraic if it is isomorphic to XA for such a polynomial A. Thefollowing major result was known to Riemann:
Theorem 6.1 (Riemann) A Riemann surface is compact if and only if it is algebraic.
If K is a subfield of C, then we say that a compact Riemann surface X is defined over K ifX ∼= XA for some polynomial A(x, y) ∈ K[x, y]. Let Q denotes the field of algebraic numbers.
A Belyı function is a meromorphic function X → Σ with no critical values outside 0, 1,∞.The following powerful result is due to Belyı [11]:
Theorem 6.2 (Belyı) A compact Riemann surface X is defined over Q if and only if there is aBelyı function β : X → Σ.
Belyı theorem implies the following theorem (see Jones [96]) giving a correspondence betweenhypermaps, Riemann surfaces and algebraic curves. It shows that the Riemann surfaces associatedwith hypermaps are precisely those defined over the field of algebraic numbers.
Theorem 6.3 [96] If X is a compact Riemann surface then the following are equivalent:
X is defined over Q;
X ∼= U/M for some subgroup M of finite index in the modular group Γ;
X ∼= U/B for some subgroup B of finite index in Γ(2);
X ∼= U/H for some subgroup H of finite index in a hyperbolic triangle group T (k,m, n)where the integers k, m, n satisfy 1/k + 1/m + 1/n < 1.
7 Enumeration of maps of given genus
Map enumeration problem
Enumeration of maps on surfaces has attracted a lot of attention last decades. In enumerationproblems we are mostly interested in enumeration of maps without semi-edges. When needed tostress it we will call such maps ordinary maps. As shown in monograph [125] the enumerationproblem was investigated for various classes of maps. Generally, problems of the following sortare considered:
Problem 7.1 How many isomorphism classes of maps of given property P and given number ofedges (vertices, faces) there are?
Beginnings of the enumerative theory of maps are closely related with the enumeration of planetrees considered in 60-th by Tutte [181], Harary, Prins and Tutte [76], see [77, 124] as well. Latera lot of other distinguished classes of maps including triangulations, outerplanar, cubic, Eulerian,nonseparable, simple, looples, two-face maps e.t.c. were considered. Research in these areas tillyear 1998 is well represented in [125]. Although there are more than 100 published papers onmap enumeration, see for instance [14, 23, 49, 112, 120, 188, 190, 207], most of them deal withthe enumeration of rooted maps of given property. In particular, there is a lack of results onenumeration of unrooted maps of genus ≥ 1. The presented results can be viewed as an attemptto fill in this gap. The problem considered in this section reads as follows.
17

Problem 7.2 What is the number of isomorphism classes of oriented unrooted maps of givengenus g and given number of edges e?
An oriented map is called rooted of one of the darts (arcs) is distinguished as a root. Isomorphismsbetween oriented rooted maps take root onto root. A rooted variant of Problem 7.2 follows.
Problem 7.3 What is the number of isomorphism classes of oriented rooted maps of given genusg and given number of edges e?
Problem 7.3 was first considered in 1963 by Tutte [180] for g = 0, i.e. for the planar case.The corresponding planar case of the unrooted version (Problem 7.2 for g = 0) was settled byLiskovets [119, 121] and Wormald [206] much later. The enumeration problem for maps of givengenus g > 0 and given number of edges was considered by Walsh and Lehman in [187, 188]. Theyhave derived an algorithm based on a recursion formula. The algorithm is applied to enumeratemaps with small number of edges. An explicit formula for number of rooted maps for g = 1 isobtained by D. Arques [8].
In 1988 Bender, Canfield and Robinson [12] derived an explicit enumeration formula for thenumber of rooted maps on torus and projective plane. Three years later [13] Bender and Canfielddetermined the function Ng(e) of rooted maps of genus g with e edges for any genus g up to someconstants. For g = 2 and g = 3 the generating functions are derived. Some refinement of theseresults can be found in [9].
In what follows we shall deal with the problem of enumeration of oriented unrooted mapswith given genus and given number of edges. Inspired by a fruitful concept of an orbifold usedin low dimensional topology and in theory of Riemann surfaces we introduce a concept of a mapon an orbifold. As it will become clear to be later, cyclic orbifolds, that is the quotients ofthe type Sγ/Z`, where Sγ is an orientable surface of genus γ surface and Z` is a cyclic groupof automorphisms of Sγ , will play a crucial role in the enumeration problem. The enumerationformula allows us to decompose the problem into two subproblems (see Theorem 7.2). First onerequires an enumeration of certain epimorphisms defined on Fuchsian groups (or on F -groups)onto a cyclic group. The other requires to enumerate rooted maps on cyclic orbifolds associatedwith the considered surface. Unfortunately, quotients of (ordinary) maps may have semiedges.We show how to reduce the problem of enumeration of rooted maps with semiedges sitting onorbifolds to the problem of enumeration of ordinary rooted maps on surfaces.
Maps on oriented orbifolds
Given regular covering ψ : M → N , let x ∈ V (N ) ∪ F (N ) ∪ E(N ) be a vertex, face or edgeof N . The ratio of degrees b(x) = deg(x)/deg(x), where x ∈ ψ−1(x) is a lift of x along ψ, willbe called a branch index of x. The branch index is a well-defined positive integer not dependingon the choice of the lift x. In some considerations, it is important to save information aboutbranch indexes coming from some regular covering defined over a map N . This can be done byintroducing a signature σ on M. A signature is a function σ : x ∈ V (N ) ∪ F (N ) ∪ E(N ) → Z+
assigning a positive integer to each vertex, edge and face, with the only restriction: if x is anedge of degree 2 then σ(x) = 1, if it is of degree 1 then σ(x) ∈ 1, 2. We say that a signatureσ on N is induced by a covering ψ : M→ N if it assigns to vertices, faces and edges of N theirbranch indexes with respect to ψ.
Given a couple (M, σ), where M is a finite oriented map and σ is a signature we define anorbifold type of (M, σ) to be an (r +1)-tuple of the form [g;m1,m2, . . . ,mr], where g is the genusof the underlying surface, 1 < m1 ≤ m2 ≤ · · · ≤ mr are integers, and mi appears in the sequence
18

si > 0 times if and only if σ takes the value mi exactly si times. The orbifold fundamental groupπ1(M, σ) of (M, σ) is a F-group
π1(M, σ) = F [g; m1, m2, . . . , mr] =
〈a1, b1, a2, b2, . . . , ag, bg, e1, . . . , er|g∏
i=1
[ai, bi]r∏
j=1
ej = 1, em11 = . . . emr
r = 1〉.
In particular, the oriented triangle group T+(k, m, n) is the F -group F [0; k,m, n]. Let ψ : M→Nbe a regular covering and σ be a signature defined on N . We say that ψ is σ-compatible if foreach element x ∈ V (N ) ∪ E(N ) ∪ F (N ) the branch index of b(x) of x is a divisor of σ(x).Signature σ defined on N lifts along a σ-compatible regular covering ψ : M → N to a derivedsignature σψ on M defined by the following rule: σψ(x) = σ(x)/b(x) for each x ∈ ψ−1(x) andeach x ∈ V (N )∪E(N )∪F (N ). Let us remark that if σ(x) = 1 for each x ∈ V (N )∪E(N )∪F (N )then σ-compatible covers over M are just smooth regular covers over M. Such a signature willbe called trivial. The following well-known statement relates the signature induced by a regularcovering between two oriented maps with the genera of the respective surfaces.
Theorem 7.1 (Riemann-Hurwitz equation) Let M→M/G be a regular covering betweenmaps on orientantable surfaces with a covering transformation group G, let M be finite. Let therespective orbifold type of N = M/G be [g; m1,m2, . . . ,mr]. Then the Euler characteristic of theunderlying surface of M is given by the
χ = |G|(2− 2g −r∑
i=1
(1− 1mi
)).
Proof of Riemann Hurwitz formula. Consider the hypermaps H on S and H′ = H/Gon Sg associated to to M → M/G = N . As usually, denote by v, e, f and by v′, e′, f ′ therespective numbers of hyper-vertices, hyper-edges, hyper-faces. By F and F ′ we denote therespective sets flags. By Euler-Poincare formula χ = v + e + f − |F |/2, where χ is the Eulercharacteristic of S. Note that the hyper-vertices, hyper-edges, hyper-faces, correspond to facesof the associated 3-valent topological maps. Now the numbers mi are orders of non-trivial cyclicstabilisers of faces of the associated 3-valent map on S in the action of G. If m is the order ofa face-stabiliser then the projected hyper-element lifts to |G|/m hyper-elements covering it. Inparticular v +e+f = |G|(v′+e′+f ′−r+
∑ri=1
1mi
), |F | = |G| · |F ′|. Inserting in the E-P formulawe obtain
χ = |G|(v′ + e′ + f ′ − r +r∑
i=1
1mi
− |F ′|/2) = |G|(2− 2g −r∑
i=1
(1− 1mi
)),
as was required.There is an analogous Riemann-Hurwitz formula for the category of maps which is more
complicated. The problem is that quotients of maps on surfaces may be maps on surfaces with anon-empty boundary, hence we first need to prove an Euler-Poincare formula for such maps.
Proof of Hurwitz bound. Theorem 5.3 establishes a bound −42χ for the size of an orienta-tion preserving group of automorphisms of an orientable surface of negative Euler characteristicχ. We are going to employ the Riemann-Hurwitz formula to prove it. Expressing the size of Gwe get
|G| = −χ
2g − 2 +∑r
i=1(1− 1mi
).
19

Denote by f(g;m1,m2, . . . , mr) = 2g−2+∑r
i=1(1− 1mi
) To maximize |G| is equivalent to minimizethe function f(g; m1,m2, . . . , mr) on the set of r + 1-tuples of integers satisfying r ≥ 0, g ≥ 0,mi ≥ 2 for every i = 1, . . . r and 2g − 2 +
∑ri=1(1− 1
mi) > 0. First note that f(0; 2, 3, 7) = 1/42
which gives |G| = 84(g − 1). We want to show that this is a minimum value of f . Assume,on the contrary, that there is (g; m1, . . . , mr) such that f(g; m1,m2, . . . ,mr) < 1/42. If r = 0then g ≥ 2 and f(g; ∅) ≥ 2, hence r ≥ 1. If g ≥ 1 and r ≥ 1 then f(g; m1,m2, . . . ,mr) ≥ 1/2and g = 0 implies r ≥ 3. If r ≥ 5 and g = 0 then f(0;m1, m2, . . . , mr) ≥ f(0; 2, 2, 2, 2, 2) ≥1/2, and f(0;m1,m2,m3,m4) ≥ f(0; 2, 2, 2, 3) = 1/6. It follows that g = 0 and r = 3. Anelementary computation proves that f(0;m1,m2,m3) < f(0;m1, m2,m3 + 1). It follows thatf(0;m1,m2,m3) ≥ minf(0; 3, 3, 4), f(0; 2, 4, 5), f(0; 2, 3, 7). Computing the critical values of fwe get f(0; 3, 3, 4) = 1/12, f(0; 2, 4, 5) = 1/20 and f(0; 2, 3, 7) = 1/42, a contradiction.
Note that there is no upper bound for the size of a discrete group of automorphisms acting onthe two orientable surfaces of Euler characteristic 0 and 2. On the other hand, The orientationpreserving groups of automorphisms of the sphere are well-known, these are the orientation pre-serving automorphisms groups of the five Platonic solids (and their subgroups) and all the cyclicgroups of finite order. The actions on the torus will be investigated in the following section.
A topological counterpart of a (combinatorial) map M with a signature σ can be establishedas follows. By an orbifold O we mean a surface S with a distinguished discrete set of points Bassigned by integers m1,m2, . . . ,mi, . . . such that mi ≥ 2, for i = 1, 2, . . . . Elements of B will becalled branch points. If S is a closed compact connected orientable surface of genus g then B isfinite of cardinality |B| = r and O is determined by its type [g;m1,m2, . . . ,mr]. Hence we writeO = O[g; m1,m2, . . . , mr]. The fundamental group π1(O) of O is an F -group defined above. A(topological) map on an orbifold O is a map on the underlying surface Sg of genus g satisfyingthe following properties:
(P1) if x ∈ B then x is either an internal point of a face, or a vertex, or an end-point of asemiedge which is not a vertex,
(P2) each face contains at most one branch point,
(P3) the branch index of x lying at the free end of a semiedge is two.
A mapping ψ : O → O is a covering if it is a branched covering between underlying surfacesmapping the set of branch points B of O onto the set B of branch points of O and each xi ∈ψ−1(xi) is mapped uniformly with the same branch index d dividing the prescribed index ri ofxi ∈ B.
Enumeration formula
Let Sγ be an orientable surface of genus γ. Denote by Orb(Sγ/Z`) the set of cyclic orbifolds givenby all actions of the cyclic group Z` of order ` on Sγ . Given orbifold O denote by Epi0(π1(O), Z`)the number of epimorphisms from the orbifold fundamental group π1(O) onto the cyclic groupZ` with a torsion-free kernel. For a cyclic orbifold O ∈ Orb(Sγ/Z`) denote by µO(m) the numberof rooted maps with m darts on O. The following formula is proved in [142].
Theorem 7.2 [142] With the above notation the number of ordinary oriented maps of genus γhaving e edges is
νγ(e) =12e
∑
`|2e2e = `m
∑
O∈Orb(Sγ/Z`)
Epi0(π1(O), Z`) · µO(m).
20

The following two propositions determine the functions Epi0(π1(O), Z`), µO(m).
Proposition 7.3 [142] Let Γ = F [g; m1, . . . , mr] be an F−group of signature(g;m1, . . . , mr). Denote by m = lcm (m1, . . . , mr) the least common multiple of m1, . . . , mr
and let m|`. Then the number of order-preserving epimorphisms of the group Γ onto a cyclicgroup Z` is given by the formula
Epi0(Γ, Z`) = m2gφ2g(`/m)E(m1,m2, . . . , mr),
where
E(m1,m2, . . . , mr) =1m
m∑
k=1
Φ(k, m1) · Φ(k, m2) . . .Φ(k, mr),
φ2g(`) is the Jordan multiplicative function of order 2g, and Φ(k, mj) is the von Sterneck function.In particular, if Γ = F [g; ∅] = F [g; 1] is a surface group of genus g we have
Epi0(Γ, Z`) = φ2g(`).
Recall that Ng(e) is the number of ordinary rooted maps of genus g having e edges. A signatureof an orbifold O ∈ Orb(Sγ/Z`) can be written in an exponential form as follows [g; 2q2 , . . . , `q` ].The symbol iqi means: the number of points with branch index i is qi.
Proposition 7.4 [142] Let O = O[g; 2q2 , . . . , `q` ] be an orbifold, qi ≥ 0 for i = 2, . . . , `. Thenthe number of rooted maps νO(m) with m darts on the orbifold O is
νO(m) =q2∑
s=0
(m
s
)( m−s2 +2−2g
q2−s, q3, . . . , q`
)Ng((m−s)/2),
with a convention that Ng(n) = 0 if n is not an integer.
The above results have a group theoretical interpretation. The enumeration of ordinary rootedmaps of given genus and number of edges is equivalent to the enumeration of torsion-free sub-groups of given genus and index of the free product Z ∗Z2
∼= T+(∞,∞, 2), while the enumerationof ordinary unrooted maps is the same as the enumeration of conjugacy classes of torsion-freesubgroups of Z ∗ Z2 of given genus and index.
The following list containing the numbers of rooted and oriented unrooted maps of genus 1up to 30 edges follows. The numbers of toroidal unrooted maps were obtained using Theorem 7.2with the help of software MATHEMATICA 4.1.
No. edges, No. rooted maps on torus, No. unrooted maps on torus:
02, 1, 103, 20, 604, 307, 4605, 4280, 45206, 56914, 485207, 736568, 5297208, 9370183, 58704709, 117822512, 655080810, 1469283166, 7348325611, 18210135416, 82780146812, 224636864830, 9360123740
21

13, 2760899996816, 10618935954414, 33833099832484, 120832830486415, 413610917006000, 1378704225052816, 5046403030066927, 15770013739868917, 61468359153954656, 180789306640846418, 747672504476150374, 2076868122589232819, 9083423595292949240, 23903746494799990020, 110239596847544663002, 275598992811736524421, 1336700736225591436496, 3182620802961588165622, 16195256987701502444284, 36807402253520587038223, 196082659434035163992720, 426266650974101744055224, 2372588693872584957422422, 4942893112344404864338825, 28692390789135657427179680, 57384781578654541352910426, 346814241363774726576771244, 666950464162479967597307827, 4190197092308320889669166128, 7759624245020199398551313628, 50605520500653135912761192668 90367000894040605089150843229, 610946861846663952302648987552 1053356658356376854039355934430, 7373356726039234245335035186504 122889278767322703855171530872
Let us remark that the initial values confirm the available data for e ≤ 6 obtained by Walsh[188] (the sequence M4253 in [170]). Similar computations were done for surfaces up to genusthree [142]. For larger genera both the numbers of rooted maps and unrooted maps are, exceptsome small values of e, not determined.
Problems
1. Determine 5 largest possible sizes of a group of automorphisms of an oriented hypermapof genus g > 1.
8 Regular hypermaps on a fixed surface
Orientably regular hypermaps of genus at most two
By the Hurwitz bound (see Theorem 5.3) the size of the automorphism group, and consequently,the size of the oriented monodromy group G = 〈R, L〉 of an orientably regular hypermap H =(D; R, L) is bounded by 84(g − 1), where g > 1 is the genus. Hence, a surface of genus at leasttwo admits only finitely many orientably regular hypermaps. One of the central problems in thetheory of maps and hypermaps is the problem of classification of all orientably regular hypermapson a fixed underlying surface.
Problem 8.1 Classify (orientably) regular hypermaps on a given surface.
Recall that orientable regular hypermaps of genus g form a subset of the orientably regularhypermaps of genus g. Also the classification of regular hypermaps on a non-orientable surface ofgenus g can be derived from the classification of orientably regular hypermaps of genus g = g− 1by using the construction of the antipodal cover. Hence the classification problem for regularhypermaps on non-orientable surface of genus g can be solved by checking the list of all orientablyregular hypermaps of genus g = g − 1 (see [150] for more detailed explanation).
Using the Euler formula (see Theorems ??, 2.1) it is not difficult to see that spherical orientablyregular hypermaps consist of the five Platonic solids, and of two infinite families of types (1, n, n),(2, 2, n) and their duals. Orientably regular maps on torus were classified by Coxeter and Moser
22

[51], and the generalization to hypermaps was done by Corn and Singerman [50]. Up to duality,there are three infinite families of toroidal orientably regular hypermaps which types are (2, 4, 4),(2, 3, 6) and (3, 3, 3), see Fig. 9. In [26, 28] the classification problem for double torus is settled.As concerns surfaces of higher genera only partial results for hypermaps are known. For instance,in [30] mirror asymmetric orientably regular hypermaps up to genus 4 are classified.
c
b
c
b
c
(b;c)
(2b;2c)
(-c;b)
(-c+b;b+c)
(-c+2b;b+2c)
YY
XXO
l2
l1
Figure 9: Toroidal regular map 4, 4b,c as a (regular) quotient of the universal map of type 4, 4
Regular maps with prescribed genus
In this subsection we shall discuss the following problem.
Problem 8.2 Given surface S classify (oriented) regular maps on S.
Sherk in [163] classified oriented regular maps of genus 3. Grek in [64, 65, 66, 67] derived char-acterization of nonoriented and oriented regular maps on surfaces (orientable and nonorientable)with Euler characteristic ≥ −4. Regular maps and oriented regular maps on surfaces of genus lessthan 8 and non-orientable surfaces of genus less than 9 have been completely classified by Garbe(see [61] and [15]). Recently, Conder and Dobcsanyi [43] with the help of a computer programmegave a list of all orientably regular maps up to genus 15.
Existence problem
Following MacLachlan [135] (see also [2]) let us denote by µ(g) the order of largest group ofconformal self-mappings (automorphisms) of a compact Riemann surface of genus g. Hurwitzbound gives µ(g) ≤ 84(g − 1). The following result was proved independently by Accola [2] andMacLachlan [135].
Theorem 8.1 [135, 2] With the above notation we have
8(g + 1) ≤ µ(g) ≤ 84(g − 1) provided g ≥ 2,
There are infinitely many integers g ≥ 2 for which the equality µ(g) = 8(g + 1) holds.
23

Having in mind the correspondence between hypermaps and Riemann surfaces we get that thereare infinitely many surfaces S such that the number of darts of any orientably regular hypermapon S is at most 8(g + 1). On the other hand, one needs at least 4g darts to cut the surface intocells. Thus the size of the monodromy group of an orientably regular map on such a surfaceranges between 4g and 8(g + 1).
While in the orientable case, for any g ≥ 1, the regular embedding of the bouquet of 2g cyclesgives a regular map of genus g, search for regular maps on nonorientable surfaces shows that thereare surfaces which do not support any regular map. More precisely, Breda and Wilson prove in[205] the following result.
Theorem 8.2 [205] Let g be an integer 1 ≤ g ≤ 52. Then there is a regular non-orientablehypermap of genus g if and only if g is different from 2, 3, 18, 24, 27, 39 or 48.
On the other hand, Conder and Everitt [42] cover by constructions about 75 percent of non-orientable genera. The following problem can be found in [42].
Problem. Are there infinitely many non-orientable surfaces supporting no regular (hy-per)maps.
The result proved in [34] represents a breakthrough in the nonorientable regular map classi-fication problem. A complete classification of all nonorientable regular maps with negative oddprime Euler characteristic – or, equivalently, regular maps on nonorientable surfaces of genus p+2where p is an odd prime, is derived. As a by-product an affirmative answer to the above existenceproblem is obtained. To be able to state our main result in a condensed form, for p ≡ −1 (mod4) we denote by ν(p) the number of pairs of positive integers (j, l) such that j > l ≥ 3, both jand l are odd, and (j − 1)(l − 1) = p + 1.
Theorem 8.3 [34] Let p be an odd prime, p 6= 7, 13, and let Np+2 be a nonorientable surface ofEuler characteristic −p (and hence of genus p + 2).
(1) If p ≡ 1 (mod 12) then there is no regular map on Np+2.
(2) If p ≡ 5 (mod 12) then, up to isomorphism and duality, there is exactlyone regular map on Np+2.
(3) If p ≡ −5 (mod 12) then, up to isomorphism and duality, there are ν(p)regular maps on Np+2.
(4) If p ≡ −1 (mod 12) then, up to isomorphism and duality, Np+2 supportsexactly ν(p) + 1 regular maps.
Corollary 8.4 There are no regular maps of Euler characteristic −p, where p is a prime ≡ 1mod 12, p > 13. In particular, there are infinitely many surfaces supporting no regular maps.
Modifications of the classification and existence problem can be considered. For instance, in[30] the classification of chiral hypermaps with genus at most four is carried. The main resultof [30] implies that there is no chiral (orientably regular) hypermap on surface of genus 2, whileeach of the surfaces of genus 3 and 4 supports (up to duality) exactly one chiral hypermap.
Examining the list of orientably regular maps up to genus 15 [43] one can see that surfaces ofgenera 2,3,4,5,6,9 and 13 support no chiral maps.
24

Improving Hurwitz bound
The above mentioned results of Accola, McLachlan, Conder and others, as well as Theorem 8.3suggest that the Hurwitz bound 84(g − 1), (168(g − 1)) on the size of discrete group of auto-morphisms of a Riemann surface of genus g can improved when considering particular sets ofsurfaces. Recently published paper [45] contains a discussion on possible improvements of theHurwitz bound. They define a group of automorphisms of a non-orientable compact surface largeif its size is > 4(−χ). The Riemann-Hurwitz formula then severely restricts possible signatures oflarge groups. Non-trivial families of large groups correspond to regular maps and regular hyper-maps of types (k, m, 3), k ≥ m ≥ 3; (k,m, 4), −χ > k ≥ m ≥ 4 and (k,m, 5), 9 ≥ k ≥ m ≥ 5. If−χ is prime the following theorem classifies large groups that correspond to regular hypermaps.
Theorem 8.5 [102] Let G be an automorphism group of a regular hypermap of type (k, m, n),k ≥ m ≥ n ≥ 3 acting on a surface of characteristic χ = −p, where p is an odd prime. Ifk ≥ m ≥ n = 3, 4 or 5, then either
(i) G ∼= L2(7) with p = 7 and [k,m, n] = [4, 3, 3] with a reduced presentation 〈r, s| r4 = s3 =(rs)3 = (rs−1)4〉, or
(ii) G ∼= PGL2(5) ∼= S5 with p = 23 and [k, m, n] = [6, 5, 4] with a reduced presentation 〈r, s| r6 =s5 = (rs)4 = 1, (rs−1)2 = rsr−2s2r−1s−1 = 1〉. In each case, there is a unique action of G, up toequivalence.
A classification result on large groups acting on orientable surfaces of genus g = p + 1, p aprime, was proved by Belolipetsky and Jones in [10]. There the set of large groups is definedmore restrictively requiring |G| > 6p.
9 Operations on maps and hypermaps, external symmetries ofhypermaps
Generally, an operation Φ is a function associating a given (hyper)map M another (hyper)mapΦ(M). Typically, we require that Φ preserve some important properties of maps such as theunderlying surface, or the underlying graph, or the monodromy group, or the hypermap subgroupetc. With each operation Φ and a fixed map M a family of external symmetries, defined bythe relation M ∼= Φ(M), is associated. Depending on the class of operations we consider,the external symmetries, called exomorphisms in [150], form a group Exo(M) containing theautomorphism group Aut(M) as a (normal) subgroup. The factor group Exo(M)/Aut(M) thencan be interpreted as a group of outer symmetries leaving M invariant.
Functors
Important class of operations is formed by functors between categories of hypermaps, i.e., it isrequired that morphisms between hypermaps are preserved. Perhaps the most familiar functorsin the category of nonoriented maps is the duality operation defined by (F ; λ, ρ, τ) 7→ (F ; τ, ρ, λ),and the Petrie operation defined by (F ; λ, ρ, τ) 7→ (F ; λ′, ρ, λ), where λ′(x) = τ(x) or λ′(x) =λτ(x) depending on whether a flag x is, or is not, associated with a semiedge, respectively. Thesetwo functors have a nice geometric description also. The above two functors generate a group offunctors isomorphic to S3 (see Wilson [197] and Lins [118]). Jones and Thornton showed thatthe above group of six operations is induced by the action of the outer automorphism group onconjugacy classes of subgroups of the group T (∞,∞, 2) = 〈λ, ρ, τ ; ρ2 = τ2 = λ2 = (τλ)2 = 1〉,which is the automorphism group of the universal map for the category of nonoriented maps.
25

Theorem 9.1 [92] The set of operations acting on the family of (nonoriented) maps induced bythe action of outer automorphism group of T (∞,∞, 2) consists of six operations forming a groupG generated by the duality and Petrie operations, and G is isomorphic to the symmetric groupS3.
Moreover, Leger and Terrasson [113] proved that the outer automorphism group of the cate-gory of nonoriented maps is S3, that is, they proved that the quotient of the group of invertibleelements from the category of maps onto itself, modulo the normal subgroup induced by innerautomorphisms of T (∞,∞, 2) is S3. As it was noted by Jones (personal communication), theabove result is nothing but a restatement of Theorem 9.1 in the language of categories. Furthergeneralisation of the above result can be found in [3].
The above results on operations on maps generalize to hypermaps as follows. Given a hyper-map H = (F ; r0, r1, r2) we can derive virtually six hypermaps by permuting the three colours 0,1, 2 of its cells; in fact, for each permutation σ ∈ S3 = S0,1,2 we define the σ-dual DσH to bethe hypermap H = (F ; rσ0, rσ1, rσ2). As expected this six operations form a group (see Machi[129]). L. James [89] proved that the outer automorphism group of T (∞,∞,∞) is isomorphicto PGL(2,Z). This infinite group induces a set of functors generated by σ-duals and one othertwisting operator.
Figure 10: Totally self-dual regular hypermap of type (4, 4, 4) of genus 2 arises as a quotient ofthe triangle T (4, 4, 4) by a characteristic subgroup .
Similar results can be derived for other categories of hypermaps [98]. As concerns functorsbetween distinguished categories of hypermaps, Singerman’s list of triangle group inclusions [167]gives rise to a set of functors between different categories of hypermaps [98]. Let us note thatthe representation of a hypermap by the 3-valent 3-coloured map as well as the Walsh bipartiterepresentation are examples of such functors. In the context of the correspondence betweenoriented maps and Riemann surfaces we would like to mention the following result.
Regular maps and the associated Riemann surfaces
The monodromy group of an oriented regular map M of type (p, q) is an epimorphic image ofT+(p, q, 2). Let K be the kernel of this epimorphism. By Theorem 6.3 U/K is a Riemann surfacewhich we denote by S(M), here K is considered to be a group of isometries of U . In [168, 169]Singerman and Syddall consider the problem whether the assignment M 7→ S(M) is injective, orin other words, whether the same Riemann surface can underlie different regular maps. The latesituation certainly happens for genus 0 regular maps, since the only Riemann surface of genus 0 is
26

the Riemann sphere. As concerns genus 1, up to duality, there are two infinite families of regularmaps (maps of type (3, 6) and of type (4, 4)) and there are two Riemann surfaces associated withthese two families. To continue our discussion we need to define the following two functorialoperations. By the truncation of M we mean the cubic map whose vertices are darts of M andtwo are joined by an edge if they form an angle of M, or they underlie the same edge. By themedial map we mean the map whose vertices are the middle points of edges of M, two beingadjacent if the respective edges form an angle of M. Finally, let e(M) denotes the number ofedges of M. Using the above defined operations one can describe regular maps sharing the sameRiemann surface in almost all cases.
Theorem 9.2 [168, 169] Let M and N be two orientably regular maps of genus > 1 with S(M) =S(N ) and e(M) ≤ e(N ). Then one of the following statements holds:
(a) N is the medial map of M,
(b) N is the truncation of M,
(c) N has type (7, 3) and M has type (7, 7),
(d) N has type (8, 3) and M has type (8, 8).
(e) N ∼= M or to its dual map.
Exponents
In order to explain what an exponent of a map is, consider an oriented mapM = (D; R,L). Recallthat the map M is reflexible (mirror symmetric) if and only if M∼= (D; R−1, L). This suggeststhe following definition: an integer e will be called an exponent of M if M∼= Me = (D; Re, L).The mapping which realizes this isomorphism is an exomorphism of M. In general, the mapMe is correctly defined provided e is coprime with the valency n of a map, i.e., with the leastcommon multiple of lengths of cycles of R. If this is the case, the underlying graphs as well asthe monodromy groups of both M and Me are identical. This is the most important propertyof the congruence operation associated with an exponent e ∈ Z∗n. For regular maps, the conversestatement is proved in [150].
Theorem 9.3 [150] If M and M′ are two oriented regular maps with the same underlying graphof valency n and with identical monodromy groups. Then they are congruent, i.e., M′ = Me forsome e ∈ Z∗n.
The exponents of a map M reduced modulo its valency form an Abelian group, the exponentgroup Ex(M) of M. Similarly, the exomorphisms of M form a group Exo(M), and this groupis an extension of the automorphism group of M by the exponent group.
The exponent group of a map M is naturally embedded in the multiplicative group Z∗n ofinvertible elements of the ring Zn of integers modulo n, n being the valency of M. Thus theorder of Ex(M) divides φ(n) (φ is Euler’s function).
In general, exponent groups are not functorial, but in [150] we investigate conditions underwhich exponents of a map can be transferred along a map homomorphism to another map.
Inner exponents
Among the exponents of a map M, so called inner exponents play a special role. The correspond-ing exomorphisms act on darts as inner automorphisms of the monodromy group. These give
27

rise to a subgroup of the exponent group, the inner exponent group IEx(M) of M. In contrastto the general exponent groups, the inner exponents are functorial, which means that a map ho-momorphism induces a homomorphism between the inner exponent groups of the correspondingmaps. The importance of inner exponents is emphasized by the fact that, apart from a short listof exceptions, inner exponent −1 implies that a regular map covers a map on a non-orientablesurface. On the other hand, the fact that a map antipodally covers a map on a non-orientablesurface forces −1 to be inner exponent. More details about antipodality and exponents can befind in [150].
Generalised Petrie duality on bipartite maps
In general the Petrie duality is not an operator for the category of oriented maps, since thetopological Petrie dual of a map on an orientable surface may be a map on a non-orientablesurface. However, for bipartite maps we have the following.
Proposition 9.4 [152] Let M be a bipartite oriented regular map. Then the following statementsare equivalent:
(1) M is reflexible,
(2) the oriented Petrie dual of M is regular.
For bipartite maps M = (D;R, L) the set of darts is a disjoint union D = D0∪D1, where D0,D1 is formed by darts based at ‘black’, ‘white’ vertices, respectively. Consequently, R = R0R1,where Ri is the restriction of R onto Di, i = 0, 1. The oriented Petrie dual of M is a mapM−1
1/2 = (D; R0R−11 , L). Replacing −1 by another involutory exponent e of the bipartite map
M we get an involutory operator acting on the set of bipartite maps. Properties of this switchoperator are studied in [152]. The following statement is proved.
Proposition 9.5 Let M = (D;R, L) be a bipartite n-valent regular map and let e2 ≡ 1 mod n.Then the following statements are equivalent:
(1) e ∈ Ex(M) is an exponent,
(2) Me1/2 = (D, R0R
e1, L) is regular.
10 Lifting automorphisms of maps
Let π : X → X be a covering of topological spaces. Assume we have a homeomorphism ψ :X → X. A question whether there is homeomorphism ψ : X → X such that ψπ = πψ is calledthe lifting automorphism problem. This problem is studied in [7, 22, 137, 208]. Particularly, thelifting automorphism problem for graphs is investigated in [19, 52, 21, 80, 106, 107, 138].
We show how a fruitful concept of voltage assignment (see [68, 69, 70]), used to describecoverings of graphs, can be modified in order to describe homomorphisms between oriented regularmaps. Voltage assignments can be used to build up regular maps from their regular quotients.The definitions and results presented in this section are taken from [140] (see also [73, 5, 6, 148,149, 175, 97]).
28

Lifting condition
Let M = (D; R,L) be an oriented map. An (oriented) angle of M is an ordered pair α = (x, y) =−→xy, where x and y are darts of M such that y ∈ R(x), R−1(x), L(x). The angle α−1 = (y, x) isthe inverse of α = (x, y). Let us denote by A(M) the set of all angles of M. An angle walk is asequence α1α2 . . . αn of angles such that the initial dart of αi coincides with the terminal dart ofαi−1 for i = 2, 3, . . . , n.
Let G be a finite group. A voltage assignment on M valued in G is a function α : A(M) → Gsuch that for any angle α ∈ A(M) one has α(α−1) = α−1(α). A voltage assignment extends fromangles to walks in an obvious way by setting α(W ) = α(α1)α(α2) . . . α(αn). The group generatedby voltages of closed walks based at a fixed dart x is called the local voltage group Gx. Since Mis connected all the local groups are conjugate subgroups of G.
Given a voltage assignment α on M = (D; R, L) valued in G set Dα = D × G and definepermutations on Dα by
Rα(x, h) = (R(x), hα(−−→xRx)),
Lα(x, h) = (L(x), hα(−−→xLx)).
One can prove that 〈Rα, Lα〉 is transitive on Dα if and only if Gx = G. If this is the case the mapMα = (Dα; Rα, Lα) is a correctly defined map called the derived map. In what follows we shallalways assume that a considered voltage assignment on M valued in G satisfies the conditionGx = G
As one can expect, a regular homomorphism M → M is equivalent to a natural projectionMα →M erasing the second coordinates (see [140]). It is important to stress that using anglevoltage assignments we can handle also coverings of maps (map homomorphisms) which maynot induce coverings between the respective underlying graphs (a disadvantage of the classicalapproach based on associating ordinary voltages to darts of the quotient map [69, 70]). Maybea bit surprising is the fact that an arbitrary homomorphism defined on an orientably regularmap is necessarily regular see Proposition 1.2 or [140]. It follows that angle voltage assignmentsprovide a convenient tool for study of orientably regular maps. A natural question arises: Underwhat condition a voltage assignment α defined on an orientably regular map M determines anorientably regular derived map Mα?
We say that a voltage assignment α : A(M) → G is locally invariant if for any τ ∈ Aut(M)and any closed walk W based at a dart x
α(W ) = 1 ⇒ α(τW ) = 1.
The above lifting condition appears in an explicit form firstly in [73], where map homomorphismsinduced by graph coverings of the underlying graphs are investigated. The following characteri-zation of homomorphisms between regular maps is proved in [140].
Theorem 10.1 [140] Let M and M be (oriented) regular maps. Then
if α is a locally invariant assignment on M, then the derived map Mα is (oriented) regular.
if ϕ : M →M is a homomorphism, then there exists a locally invariant voltage assignmentα on M such that the natural projection Mα →M is equivalent to ϕ.
Let us note also that lifting part of Theorem 10.1 is, in a weaker form, proved in [73]. Weakerform of the above theorem can be found also in [138]. Voltage assignments on flags of hypermapsand lifting conditions are studied by Surowski in [177].
29

By Theorem 10.1 coverings between regular maps are always regular with the group of coveringtransformations isomorphic to the voltage group. With some effort one can show that everyoriented regular map with a non-solvable monodromy group covers regularly either a regular mapwith a non-abelian simple group monodromy group, or it covers regularly a bipartite orientedregular map which partition stabilizer is either simple non-abelian, or a direct product of twoisomorphic simple non-abelian groups (see [153]).
Abelian voltage group
A global version of the invariance condition was used a long time ago in the proof that thereare infinitely many 5-arc-transitive cubic graphs (see [19]). We say that a voltage assignmentα : A(M) → G is invariant if for any τ ∈ Aut(M) and any walk W
α(W ) = 1 ⇒ α(τW ) = 1.
Of course, an invariant voltage assignment is locally invariant as well. If the assignment α :A(M) → G is invariant, then Aut(Mα) is a split extension of G by Aut(M) (see [140]). Eachmap M admits at least one invariant voltage assignment which can be constructed as follows:Let G = Zn
2 , where n is |A(M)|/2. Take a set X = ε1, ε2, . . . , εn of generators of G and let τbe a bijection A(M) → X. Then τ is an invariant voltage assignment. Since the local voltagegroup is not equal to G, the derived map splits into isomorphic connected parts. A restriction ofthe covering onto any connectivity component yields a map homomorphism such that Aut(M)lifts. In particular, if M is regular then so is the lifted map. Another example of an invariantvoltage assignment can be constructed by assigning the voltage 1 ∈ (Z2,+) to each angle of M.The double cover is connected if and only if the truncation of M is not bipartite.
The lifting condition significantly simplifies if the voltage group is abelian. Since a maphomomorphism between regular maps with a solvable automorphism groups decomposes intoa sequence of coverings, each with an elementary abelian group of covering transformations,elementary abelian covers of maps such that the map automorphism group lifts are of specialimportance.
Voltage assignments in elementary abelian groups were studied by Malnic, Marusic andPotocnik in [141] and by Du, Kwak and Xu in [54]. Using some ideas of linear algebra analgorithm to check the lifting condition is derived. Invariant voltage assignments defined ongraphs and valued in products of cyclic groups are used in [19, 21, 175, 138] as well. Regularcyclic covers over Platonic solids are described in [176] and [97], regular cyclic covers over toroidalregular maps are classified in [166].
Homology and cohomology theories of hypermaps are built in works of Machi [130], Surowskiand Schroeder [178]. The following construction shows that every regular map of genus g admitsa locally invariant ‘homology voltage assignment’ of rank 2g.
Theorem 10.2 (Theorem 7.1. in [178]) Let M be a regular orientable map of Euler characteristic2− 2g and genus g. Then for each positive integer n, there is a regular (connected) map of Eulercharacteristic 2gn(2− 2g) covering M.
11 Regular embeddings of graphs
Cayley maps
A Cayley map is an oriented map M, which underlying graph is a Cayley graph C(Γ, X) suchthat the local rotation of generators at any vertex is induced by a cyclic permutation ρ of the
30

generating set X. The above condition implies that the colour group Γ ∈ Aut(M) acts as a groupof map automorphisms. Surprisingly large number of significant constructions in topologicalgraph theory (explicitly or implicitly) include a construction of a Cayley maps. The notion ofCayley maps was first used by Biggs in [18] as a name for a class of regular Cayley maps callednowadays balanced Cayley maps. Cayley complete maps were used to solve the Heawood mapcoloring problem [156]. As we can see below all regular embeddings of complete graphs, completebipartite graphs and of hypercubes are Cayley maps. A systematic study of regular Cayley mapsstarted by works of Siran and Skoviera [174, 171] and continued in articles of Jajcay, Conder,Tucker, Richter and others (see for instance [20, 82, 83, 84, 85, 155, 86, 193]). An exhaustiveinformation on Cayley maps is collected in [155]. A sample of results related to regular Cayleymaps follow.
Theorem 11.1 [155] Let M = (D; R, L) be a regular map of valency r. Then M is a Cayleymap if and only if there is a homomorphism ϕ : Mon(M) → Sym(r) sending R 7→ (1, 2, . . . , r).
The above theorem suggests that regular Cayley maps of the same valency r split into finitelymany classes, Cayley maps belonging to the same class cover the same embedding of a one-vertexgraph. Particularly, if the one-vertex map is regular then the Cayley map M is balanced, i.e., thedistribution ρ of generators satisfies (ρx)−1 = ρ(x−1) for all x ∈ X. In this particular case, thecovering is regular and it induces a locally invariant voltage assignment in Γ. The local invarianceis in this case equivalent to the statement: “the local rotation of generators ρ of Γ extends to agroup automorphism of Γ”. The latter condition was known already for Biggs and White ( see[18, 191]). Regularity and other related properties of balanced Cayley maps are studied in [174].
For regular balanced Cayley map of valency n the monodromy group (or equivalently) themap automorphism group is a split extension Zn : K of the cyclic group of order n by the colourgroup K acting regularly on vertices of the map. In general, the monodromy group 〈R, L〉 of aregular Cayley map is a product 〈R〉 ·K. More precisely, we have the following statement provedby Jajcay and Siran [86].
Theorem 11.2 Let M be an n-valent regular map with monodromy group G = 〈R,L〉. ThenM is a Cayley map if and only if there exists a subgroup K of G such that 〈R〉 · K = G andK ∩ 〈R〉 = 1G.
Skew-morphisms of groups and regular Cayley maps
The monodromy group of an n-valent balanced regular Cayley map based on a group K can becostructed as an external semidirect product. We have
Proposition 11.3 [174] Let M be a Cayley map based on a group K defined by a cyclic permu-tation of the generators ρ. Then M is a regular balanced Cayley map if and only if ρ extends toan automorphism of K.
Theorem 11.2 and Proposition 11.3 suggest that the following generalisation of a group auto-morphism could be useful to study the structure of monodromy groups (automorphism groups)of Cayley regular maps.
Let H be a finite group, ϕ : H −→ H a permutation of H of order k (in the full symmetricgroup Sym(H)), and π : H −→ Zk a function from H into the cyclic group Zk. We say that ϕ isa skew-morphism of H, with an associated power function π, if ϕ(1H) = 1H and
ϕ(ab) = ϕ(a)ϕπ(a)(b) for all a, b ∈ H
31

where ϕπ(a)(b) is the image of b under ϕ applied π(a) times.Proposition 11.3 generalizes as follows.
Theorem 11.4 [86] Let M be a Cayley map based on a group K = 〈x1, x2, . . . , xn〉 defined by acyclic permutation of generators ρ = (x1, x2, . . . , xn). Then M is regular if and only if ρ extendsto a skew-morphism of K.
The following two propositions summarise known properties of skew morphisms (see Jajcay-Siran [86]).)
Proposition 11.5 [86] Let ϕ be a skew-morphism of a finite group H and let π be the powerfunction of ϕ. Then the following hold:
(a) The set kerπ = a ∈ H | π(a) = 1 is a subgroup of H,
(b) π(g) = π(h) if and only if g and h belong to the same right coset of the subgroup kerπ inH,
(c) The set Fixϕ = a ∈ H | ϕ(a) = a is a subgroup of H,
(d) π(ghg−1) = 1 for all h ∈ kerπ ∩ Fixϕ and all g ∈ H
(e) The group kerπ ∩ Fixϕ is a normal subgroup of Fixϕ.
Skew-morphism of abelian groups satisfy some additional properties (Conder-Jajcay-Tucker [46,47]).
Proposition 11.6 If A is a finite abelian group, and ϕ is a skew-morphism of A, then
(i) ϕ preserves kerπ set-wise (that is, ϕ(kerπ) = kerπ),
(ii) the restriction of ϕ to kerπ is a group automorphism of kerπ, and
(iii) for each a in A, the power π(a) is congruent to 1 modulo the length of every non-trivialorbit of ϕ on kerπ.
Given skew-morphism σ over an abelian group A consider the decomposition O of A into orbits.The following hold:
(i) 0 ∈ O,
(ii) if o ∈ O then the set o−1 = −x|x ∈ o ∈ O is an orbit.
It follows that orbits of σ form a system of basic sets over Schur ring over Zn. This observationallows as to apply the theory of Schur rings to investigate skew-morphisms over abelian groups.
In [47] the following problem is investigated in detail.
Problem. Which abelian groups admit regular Cayley maps?
Since the multiplication by −1 extends to a group automorphism of a cyclic group, each cyclicgroup (Zn,+) admits a trivial balanced regular Cayley map by taking the generating set to be1,−1. As concerns the existence of non-trivial balanced regular Cayley maps based on cyclicgroups the following statement was proved in [47].
32

Theorem 11.7 [47] For odd m > 1 the cyclic group Zm has a non-trivial balanced regular Cayleymap if and only if m is not a product of distinct Fermat primes one of which is 3.
Skew-morphisms with kernel of index 1 are group automorphisms. Skew-morphism with kernelof index 2 are called t-automorphisms in [126]. If a group G admits a skew-morphism with kernelK of index 2 then G is a Z2-extension of K. In fact, all t-automorphisms can be described interms Z2-extensions of the kernel K and its automorphism group Aut(K) (see [126] for details).
Classification of regular embeddings of given graph
The classification of regular maps by the underlying graph was initiated by Heffter [78] whoconstructed regular maps by embedding the complete graph Kp, p a prime, into the surface ofgenus (p − 1)(p − 4)/4 or (p2 − 7p + 4)/4 according to whether p ≡ 1 or p ≡ 3 (mod 4). Theclassification of regular embeddings of the complete graph has been completed by work of severalauthors, see [16, 88] and [87, 200].
In [150] the following approach to classification of (orientably) regular maps with a givenunderlying graph divided into three stages is suggested.
The first stage consists in characterizing all the finite graphs that underlie some regularmap. At the theoretical level, this stage is completed: necessary and sufficient conditions for agraph G to underlie a regular map (oriented or nonoriented, reflexible or irreflexible) have beengiven by Gardiner, Nedela, Siran and Skoviera [62]. The conditions are expressed in terms of theautomorphism group of a graph. In the case of oriented maps the existence of a group G ≤ Aut(G)such that the action on darts of G is regular with cyclic stabilizer of a vertex is required. For thenonoriented case the statement follows.
Theorem 11.8 [62] A connected graph G of valency at least 3 is the underlying graph of a regularmap if and only if its automorphism group contains a subgroup G such that
(1) G acts transitively on the set of darts of G,
(2) the edge stabilizer Ge of an edge is dihedral of order 4,
(3) the stabilizer Gv of a vertex v is dihedral with a cyclic group of index two acting regularlyon darts incident to v.
At the second stage, one has to analyze the automorphism group of a graph G satisfying theabove mentioned necessary and sufficient conditions and to specify the appropriate subgroups inAut(G) to be the map automorphism groups. Of course, it is sufficient to consider one represen-tative of every conjugacy class.
Finally, at the third stage, one is dealing with one of the subgroups of Aut(G) chosen at theprevious stage, say G. One then determines all the regular maps whose automorphism group isG. As shown in Section 9, this step in the classification process can be successfully accomplished.Indeed, if (G; R) and (G; R′) are two regular maps (with the same underlying graph G) whoseautomorphism group is G, then there is an integer e coprime with the valency of G, say n,such that R′ = Re (Theorem 9.3). It follows that the isomorphism classes of maps M withAut(M) = G correspond to the cosets of the exponent group Ex(G, R) in Z∗n, and their numberis |Z∗n : Ex(M)|. I what follows by a regular embedding we mean an embedding of a graph suchthat the corresponding map is regular in the category of MAPS. An orientably regular embeddingwill be an embedding of a graph into an orientable surface such that the corresponding map isorientably regular.
33

Complete maps
The graph-theoretical approach to the classification problem can be nicely illustrated by theexample of complete graphs. A map determined by a 2-cell embedding of a complete graph intoa closed surface will be called a complete map. It follows from the general characterization [62]that an automorphism group G of an orientably regular embedding of the complete graph on nvertices Kn acts regularly on the set of darts of Kn with cyclic vertex stabilizer of order n − 1.Since the set of darts of Kn can be identified with all pairs (a, b) ∈ Zn × Zn, the action of Gon the set of vertices is sharply transitive. Such groups are well-known, it follows that n = pk
is a power of prime and G ≤ Sn∼= Aut(Kn) is the group of affine transformations of GF (pk).
It was proved by James and Jones [88] that every oriented regular map of Kn is isomorphicto the map Mt = (D; R, L) for some primitive element t of the field, where D = Zn × Zn,L(a, b) = (b, a) and R(a, b) = (a, a + (b − a)t). Moreover, two such maps are isomorphic if andonly if the corresponding primitive elements are conjugate under the Galois group Gal(pk) (see[150]). The latter is a consequence of the fact that the exponent group Ex(Mt) is isomorphicin a very natural way with Gal(pk). Thus there are φ(pk−1)
k nonisomorphic orientably regularembeddings of Kn, where φ(n) is the Euler function. Hence we have
Theorem 11.9 The following statements hold:
(1) An orientably regular embedding of Kn (n ≥ 2) exists if and only if n = pk is a power ofprime;
(2) A complete map M = (D; R, L) with n = pk vertices is regular if and only if M∼= Mt forsome primitive element t of GF (n) = GF (pk).
(3) Let n = pk is a power of prime. There are φ(pk−1)k orientably regular embeddings of Kn.
Note that the above maps Mt are balanced Cayley maps with the distribution of genera-tors in Z∗n determined by the multiplication by t. Of course this multiplication determines anautomorphism of Zn and hence by Proposition 11.3 all the maps Mt are orientably regular.
It is a bit surprising that not all complete graphs admit oriented regular embeddings. Asconcerns regular embeddings the condition on n is even more restrictive. It is proved in [87, 200]that Kn admits such an embedding if and only if n is 2,3,4 or 6. Thus the maps Mt form a familyof chiral maps provided n = pk ≥ 5.
Complete bipartite maps
It is well-known that for each integer n, the complete bipartite graph Kn,n has at least one regularembedding in an orientable surface described by Biggs and White [20, §5.6.7] as a Cayley mapfor the group Z2n. In [154] it is shown that there is exactly one regular embedding of Kp,p, p aprime. This result was generalised in [100] proving that there is a unique regular embedding ofKn,n if and only if square of a prime does not divide n and p - q − 1 for any two prime divisorsof n. Such prime divisors of n are called disjoint. Note that the set of n admitting a uniqueregular embedding of Kn,n coincides with the set of n such that there is a unique group of ordern. Perhaps, the most general result is proved in [101], where the regular embeddings of Kn,n areclassified in case when n is odd and any two prime divisors p, q of n are disjoint.
Theorem 11.10 For n =∏k
i=1 peii , where pi are distinct primes i = 1, . . . , k, denote ν(n) =∏k
i=1 pei−1i = n/p1 . . . pk. If n is odd then the number of oriented regular embeddings of Kn,n is
ν(n) ≥ ρ(n), with equality if and only if the primes dividing n are mutually disjoint.In particular, there are exactly pe−1 oriented regular embeddings of Kpe,pe, p an odd prime.
34

All the pe−1 non-isomorphic regular embeddings of Kn,n (n = pe a power of an odd prime)are of type 2n, n and of genus (n − 1)(n − 2)/2. The method of the proof uses the followingfact: if M is an oriented regular map with the underlying graph Kn,n for some n then thesubgroup G = Aut+0 M < Aut(M) of automorphisms of M, preserving vertex-colours, factorisesas a product of two disjoint cyclic groups of order n. Generally, the structure of groups which areproducts of two cyclic groups is not known. The main obstacle seems to be a lack of informationin the case when the considered product is not metacyclic. When n is an odd prime power, aresult of Huppert [81] implies that such a group G must be metacyclic, and this enabled us toclassify the possibilities for G, and hence for M. When p = 2, however, Huppert’s result does notapply, and indeed for each e ≥ 2 there are regular embeddings of Kn,n (n = 2e) for which G isnot metacyclic, so these are not direct analogues of the maps arising when p is odd. Nevertheless,the techniques used in the odd case can also be applied here, giving a partial classification forp = 2, provided one restricts to those embeddings for which G is metacyclic. Recently, the regularembeddings of complete bipartite graphs with G = HK, where H ∼= K ∼= Z2e are isomorphiccyclic 2-groups, were classified [57]. It turned out that given e > 2 there are exactly 4 regularmaps with non-metacyclic G < Aut(M). Hence we have
Theorem 11.11 Let n = 2e be a power of two, e > 2. Then there are exactly 2e−2 + 4 orientedregular embeddings of Kn,n.
For n = 2 there is one, and for n = 4 there are two regular embeddings of Kn,n, respectively.
Example 11.12 A family of regular embeddings of K2n,2n, n ≥ 2 with a non-metacyclic colourpreserving subgroup G can be obtained from the regular toroidal map M = 4, 4n,n first takingthe Petrie dual P(M) and then applying the duality operator D. Since M is a reflexible regularbipartite map, the map D(P(M)) is regular. Since M has two parallel sets of n Petrie polygonsof length n, each polygon having no edges in common with the other polygons in its own set, andone edge in common with each polygon in the other set (see Fig. 11); it follows that the verticesand edges of On = D(P(M)) have the same incidence properties, that is, the underlying graph ofthe map is K2n,2n. Since its faces are 4-gons, On is a minimum-genus embedding of K2n,2n. Toprove that G is not metacyclic one needs to analyse its structure, in particular, its derived group[57].
Figure 11: Petrie polygons in 4, 44,4.
The classification of regular embeddings of complete bipartite graphs is still not completed.Some new results were proved by using an approach in [108] based on the following theorem.
35

Theorem 11.13 Let M be an oriented regular embedding of Kn,n. Then there is an assignmentof vertices V → 0, 1, . . . , n− 1∪ 0′, 1′, . . . , (n− 1)′ of Kn,n such that the vertex stabiliser at avertex assigned by 0 is 〈ρ〉 ≤ Aut(M), where ρ = σ(0′, 1′, . . . , (n− 1)′) and σ is a skew-morphismof Zn of order d|n with a power function π(x) = −σ−x(−1). Moreover, each such skew-morphismof Zn determines exactly one regular embedding of Kn,n.
Using the above theorem Kwak and Kwon [109] proved that for n odd there is exactly one(reflexible) regular embedding of Kn,n, namely the standard one constructed by Biggs and Whitewith G = Zn × Zn and Aut(M) ∼= (Zn × Zn) : Z2.
Regular embeddings of n-cubes
The n-dimensional cube Qn is a graph whose vertex-set V is formed by the vectors of dimensionn over the field GF (2), two vertices are adjacent if they differ in precisely one coordinate. Theexistence of at least two regular embeddings of Qn for every n was known a long time ago. Forinstance, Q3 has the well-known 4-gonal regular embedding in the sphere, as well as a hexagonalregular embedding in the torus, the map 6, 32,0 in the Coxeter-Moser notation [51, page 107].In [149] the following family of regular maps with the underlying graph Qn is constructed. Lete0, e1, . . . , en−1 denote the standard basis for V. Then, an arc of Qn is an ordered pair ofvertices (v,v + ej) for some v ∈ V and for some j. The dart-reversing involution L is givenby L(v,v + ej) = (v + ej ,v). Let e be an element of Zn such that e2 ≡ 1 ( mod n). SetR(v,v + ej) = (v,v + ej+e||v||), where ||v|| is the sum of components of v modulo 2. Denote byM(n, e) = (Qn;R) = (D; R, L) the above map. In [149] is conjectured that there are no otheroriented regular embeddings of Qn. In [58] the conjecture is confirmed for odd n.
Theorem 11.14 Let Qn be the n-dimensional cube, where n is odd. Then any oriented regularmap M with the underlying graph Qn is isomorphic to M(n, e) for some integer e satisfyinge2 ≡ 1 ( mod n). Moreover, different solutions of the congruence e2 ≡ 1 ( mod n) give rise tonon-isomorphic maps.
In contrast, in [110] a lot of regular embeddings of Qn not belonging in the above family areconstructed for every even n, n ≥ 6. Thus the conjecture fails for even integers n ≥ 6. Theclassification problem for even n remains open. Moreover, there are no regular embeddings of Qn
into non-orientable surfaces for n > 2, [111].
Other families of graphs
Regular embeddings of several other families of were considered. The classification is known forthe tensor products Kn⊗K2 [148, 149]; for the complete multipartite graphs Kn[Kp], p a prime,[56]; for graphs with p and pq vertices, p, q primes, [55]; for merged Johnson’s graphs in [99].Regular embeddings of graphs with multiple edges are considered in [115]. For further results onregular embeddings of graphs see also [116, 117].
Lifting of classification
Sometimes, we are able to “lift” the classification of regular embeddings of a graph K to theclassification of regular embeddings of K, where K covers K. This approach is used in [148, 149]to classify oriented regular embeddings of the tensor product Kn⊗K2 and of all oriented regularmaps with two faces. The maps with two faces were previously dealt with by Brahana [24],Coxeter and Moser [51], Vince [185] and Garbe [61]. Surprisingly, the latter classification result
36

can be employed in deriving a simple arithmetic condition for a generalized Petersen graph to bea Cayley graph [147].
The method of lifting regular maps wrapped by exponents from the base graph to its canonicaldouble covering can be generalized to other coverings. In a more general approach developed in[149], the wrapping is controlled by a homomorphism from the group of covering transformationsto the exponent group of the base map which is to be lifted with wraps. The technique ofwrapped lifts produces many new regular maps and seems to be very fruitful and promising forthe construction and classification of bipartite regular maps. In [152] the above construction isexplained from the point of view of the switch operator introduced in Section 9. Particularly,using this technique the above mentioned oriented regular embeddings of n-dimensional cubeswere constructed in [149].
References
[1] M. Abas, Homomorphisms of triangle groups with large injectivity radius, Acta Math. Univ. Come-niane, Vol. LXXII (2) (2003), 253–259.
[2] R.D.M. Accola, On the number of automorphisms of a closed Riemann surface, Trans. Amer.Math. Soc. 131 (1968), 398–408.
[3] K. Anderson and D. Surowski, Coxeter-Petrie complexes of regular maps, European J. Combin.23 (2002), 861–880.
[4] T.M. Apostol, “Introduction to analytical number theory”, Springer,Berlin- New York, 1976.
[5] D. Archdeacon, R. B. Richter, J. Siran, and M. Skoviera, Branched coverings of maps and lifts ofmap homomorphisms, Austral. J. Comb. 9 (1994), 109–121.
[6] D. Archdeacon, P. Gvozdjak and J. Siran, Constructing and forbidding automorphisms in liftedmaps, Math. Slovaca 47 (1997), 113–129.
[7] M.A. Armstrong, Lifting group actions to covering spaces, in Discrete groups and geometry, eds.W. J. Harwey, C. Maclachlan, London Math. Soc. Lecture Notes Vol. 173, Cambridge Univ. Press,Cambridge, 1992, 10–15.
[8] D. Arques, Relations fonctionelles et denombrement des cartes poinees sur le torre, (French), J.Combin. Theory B 43 (1987), 253–274.
[9] D. Arques, A. Giorgetti, Enumeration des cartes pointees sur une surface orientable de genrequelconque en fonction des nombres de sommets et de faces, J. Combin. Theory B 77 (1999),1–24.
[10] M. Belolipetsky, G. Jones, Automorphism groups of Riemann surfaces of genus p + 1, preprint.
[11] G.V. BelyI, On Galois extensions of a maximal cyclotomic field’, Izv. Akad. Nauk SSSR 43 (1979),269–276,info (Russian) Math. USSR Izvestiya 14 (1980), 247–256 (English translation).
[12] E.A. Bender, E.A. Canfield and R.W. Robinson, The enumeration of maps on the torus and onthe projective plane, Canadian Math. Bul. 31 (1988), 257–271.
[13] E.A. Bender, E.A. Canfield, The number of rooted maps on an orientable surface, J. Combin.Theory B 53 (1991), 293–299.
[14] E.A. Bender, N.C. Wormald, The number of loopless planar maps, Discrete Math. 54 (1985),235–237.
[15] P. Bergau and D. Garbe, Non-orientable and orientable regular maps, in Proc. Groups – Korea1988 (Pusan, August 1988), Lecture Notes in Math. 1398, Springer-Verlag, Berlin – New York,1989, 29–42.
37

[16] N.L. Biggs, Classification of complete maps on orientable surfaces, Rend. Mat. (6) 4 (1971), 132–138.
[17] N.L. Biggs, Automorphisms of imbedded graphs, J. Combin. Theory Ser. B 11 (1971) , 132–138.
[18] N.L. Biggs, Cayley maps and symmetrical maps, Proc. Cambridge Philos. Soc. 72 (1972), 381–386.
[19] N.L. Biggs, “Algebraic Graph Theory”, Cambridge Univ. Press, Cambridge, 1974.
[20] N.L. Biggs and A.T. White, “Permutation Groups and Combinatorial Structures”, CambridgeUniversity Press, Cambridge, 1979, London Math. Soc. Lecture Notes 33.
[21] N.L. Biggs, Homological coverings of graphs, J. London Math. Soc. 30 (1984), 1–14.
[22] J.S. Birman and H.M. Hilden, Lifting and projecting homeomorphisms, Arch. Math. 23 (1972),428–434.
[23] M. Bosquet, G. Labelle, P. Leroux, Enumeration of planar two-face maps, Discrete Math. 222(2000), 1–25.
[24] H.R. Brahana, Regular maps and their groups, Amer. J. Math. 48 (1927), 268–284.
[25] A. Breda d’Azevedo, “Hypermaps and symmetry”, Thesis Univ. Southampton, Southampton,1991.
[26] A. Breda d’Azevedo, The reflexible hypermaps of characteristic -2, Math. Slovaca 47 (1997), 131–153.
[27] A. Breda d’Azevedo and G. Jones, Platonic Hypermaps, Contributions to Algebra and Geometry42 (2001), 1-37.
[28] A. Breda d’Azevedo and G. Jones, Rotary hypermaps of genus 2, Contributions to Algebra andGeometry 42 (2001), 39–58.
[29] A. Breda d’Azevedo, R. Nedela, Join and intersection of hypermaps, Acta Univ. M. Belii 9 (2001),13–28.
[30] A. Breda d’Azevedo, R. Nedela, Chiral hypermaps of small genus, Contributions to Algebra andGeometry 44 (1), 2003, 127–143.
[31] A. Breda d’Azevedo, R. Nedela, Half-arc-transitive graphs and regular hypermaps, European J.Combin. 25 (2004), 423–436.
[32] A. Breda d’Azevedo, G. Jones, R. Nedela and M. Skoviera, Chirality index of maps and hypermaps,in preparation.
[33] A. Breda d’Azevedo and G. Jones, Double coverings and reflexible hypermaps, Contributions inAlgebra and Geometry, to appear.
[34] A. Breda d’Azevedo, R. Nedela, J. Siran, Classification of regular maps of prime negative Eulercharacteristic, Transactions of Amer. Math. Soc., in print.
[35] R.P. Bryant, D. Singerman, Foundations of the theory of maps on surfaces with boundary, Quart.J. Math. Oxford 36 (1985), 17–41.
[36] W. Burnside, “Theory of Groups of Finite Order” (reprinted, 2nd edition), Dover, New York,1955.
[37] J.M. Cohen, On Hurwitz extensions by PSL2(7), Math. Proc. Cambridge Phil. Soc. 86 (1979),395–400.
[38] M. Conder, Generators for alternating and symmetric groups, J. London Math. Soc. 22 (1980),75–86.
38

[39] M. Conder, Maximal automorphism groups of symmetric Riemann surfaces with small genus,Journal of Algebra 114 (1988), 16–28.
[40] M. Conder, Hurwitz groups - a brief survey, Bull. Amer. Math. Soc. 23 (1990), 359–370.
[41] M. Conder and R.S. Kulkarni, Infinite families of automorphism groups of Riemann surfaces, in“Discrete Groups and Geometry”, London Math. Soc. Lecture Notes 173 , 1992, 47–56, eds.Harvey, McLachlan.
[42] M. Conder and B. Everitt, Regular maps on non-orientable surfaces, Geom. Dedicata 56 (1995),209–219.
[43] M. Conder and P. Dobcsanyi, Determination of all regular maps of small genus, J. Combin. TheoryB 81 (2001), 224–242.
[44] M. Conder, Hurwitz groups with given centre, Bull. London Math. Soc. 34 (2002), 725–728.
[45] M. Conder, C. Maclachlan, S. Todorovic-Vasiljevic and S. Wilson, Bounds for the number ofautomorphisms of a compact non-orientable surface, Journal London Math. Soc. 68 (2003), 65–82.
[46] M. Conder, R. Jajcay and T. Tucker, Regular t-balanced Cayley maps, J. Combin. Theory B,accepted.
[47] M. Conder, R. Jajcay and T. Tucker, Regular Cayley maps for finite abelian groups, preprint.
[48] R. Cori and A. Machı, Maps, hypermaps and their automorphisms: a survey I, II, III’, ExpositionesMath. 10 (1992), 403–427, 429–447, 449–467.
[49] R. Cori, Bijective census of rooted planar maps: A survey, in A. Barlotti, M. Delest, R. Pinzani(Eds.), Proceedings of the fifth Conference on formal power series and algebraic combinatorics,Florence, 1993, 131–141.
[50] D. Corn and D. Singerman, Regular hypermaps , European J. Combin. 9 (1988), 337–351.
[51] H.S.M. Coxeter and W.O.J. Moser, “Generators and Relations for Discrete Groups” (Fourth Edi-tion), Springer-Verlag, Berlin, 1984.
[52] D. Z. Djokovic, Automorphisms of graphs and coverings, J. Combin. Theory B 16 (1974), 243–247.
[53] S.Doro and S.Wilson, Rotary maps of type 6, 64 , Quart. J. Math. Oxford Ser. (2) 31 (1980),403–414.
[54] S.F. Du, J.H. Kwak, M.Y.Xu, Linear criteria for lifting automorphisms of elementary abelianregular coverings, Linear Algebra and its Applications 373 (2003), 101–119.
[55] S.F.Du, J.H. Kwak, R. Nedela, Regular maps with pq vertices , J. Algebraic Combin. 19 (2004),123–141.
[56] S.F. Du, J.H. Kwak, R. Nedela, Regular embeddings of complete multipartite graphs, EuropeanJ. Combin. 26 (2005), 505–519.
[57] S.F.Du, G. Jones, J.H.Kwak, R.Nedela, M. Skoviera, Regular Embeddings of K2e,2e , preprint.
[58] S.F. Du, J.H. Kwak, R. Nedela, Classification of Regular Embeddings of Hypercubes of OddDimension, preprint.
[59] M.L.N. Downs and G. A. Jones, Enumerating regular objects with a given automorphism group,Discrete Math. 64 (1987), 134–151.
[60] R.H. Fox, On Fenchel’s conjecture about F -groups, Mat. Tidskrift B (1952), 61–65.
[61] D. Garbe, Uber die regularen Zerlegungen orientierbarer Flachen, J. Reine Angew. Math. 237(1969), 39–55.
39

[62] A. Gardiner, R. Nedela, J. Siran and M. Skoviera, Characterization of graphs which underlieregular maps on closed surfaces, J. London Math. Soc. 59 (1999), 100–108.
[63] A. Gray and S. Wilson, A more elementary proof of Grunbaum’s conjecture, Congr. Numer. 72(1990), 25–32.
[64] A.S. Grek, Regular polyhedra on a closed surface with Euler characteristic χ = −1, Russian, TrudyTbiliss. Mat. Inst. 27 (1960), 103–112.
[65] A.S. Grek, Regular polyhedra of the simplest hyperbolic types, Russian, Ivanov Gos. Ped. Inst.Ucen. Zap. 34 (1963), 27–30.
[66] A.S. Grek, Polyhedra on surfaces with Euler characteristic χ = −4, Russian, Soobsc. Akad. NaukGruzin. SSR 42 (1966), 11–16.
[67] A.S. Grek, Polyhedra on a closed surface whose Euler characteristic is χ = −3, Izv. Vyss. Uceb.Zaved. 55 (6) (1966), 50–53 (Russian), English translation: AMS Translations 78 (1968), 127–131.
[68] J.L. Gross, Voltage graphs, Discrete Math. 9 (1974), 239–246.
[69] J.L. Gross and T.W. Tucker, Generating all graph coverings by permutation voltage assignments,Discrete Math. 18 (1977), 273–283.
[70] J.L. Gross and T.W. Tucker, “Topological Graph Theory”, Wiley, New York, 1987.
[71] A. Grothendieck, ‘Esquisse d’un programme’, Montpellier, preprint, 1984.
[72] B. Grunbaum, Regularity of graphs, complexes and designs, in Problemes combinatoires et theoriedes graphes, Colloques internationaux C.N.R.S. 260, Paris, 1978, 191–197.
[73] P. Gvozdjak and J. Siran, Regular maps from voltage assignments in Graph Structure Theory,N. Robertson, P. Seymour, Eds., Contemporary Mathematics (AMS Series) Vol. 147, 441–454,1993.
[74] P. Gvozdjak and J. Siran, Arc-transitive non-Cayley graphs from regular maps, Acta Math. Univ.Com. 63 (1994), 309–313.
[75] P. Hall, The Eulerian functions of a group, Quart. J. Math. Oxford 7 (1936), 134–151.
[76] F. Harary, G. Prins, W.T. Tutte, The number of plane trees, Indag. Math. 26 (1964), 319–329.
[77] F. Harary, W.T. Tutte, The number of plane trees with given partition, Mathematika 11 (1964),99–101.
[78] L. Heffter, Uber metacyklische Gruppen und Nachbarconfigurationen, Math. Ann. 50 (1898), 261–268.
[79] J. Hempel, Residual finiteness of surface groups, Proc. Amer. Math. Soc. 32 (1972), 323.
[80] M. Hofmeister, Isomorphisms and automorphisms of graph coverings, Discrete Math. 98 (1991),175–183.
[81] B. Huppert, Uber das Produkt von paarweise vertauschbaren zyklischen Gruppen, Math. Zeitsch.58 (1953), 243–264.
[82] R. Jajcay, Automorphism groups of Cayley maps, J. Combin. Theory B 59 (1993), 297–310.
[83] R. Jajcay, Characterization and construction of Cayley graphs admitting regular Cayley maps,Discrete Math. 158 (1996), 151–160.
[84] R. Jajcay, On a construction of infinite families of regular Cayley maps , Combinatorica 18 (1998),191–199.
[85] R. Jajcay, The structure of automorphism groups of Cayley graphs and maps, J. Algebraic Combin.12 (2000), 73–84.
40

[86] R. Jajcay and J. Siran, Skew-morphisms of regular Cayley maps , Discrete Math. 244 (2002),167–179.
[87] L.D. James, Imbeddings of the complete graph, Ars Combin. 16-B (1983), 57–72.
[88] L.D. James and G.A. Jones, Regular orientable imbeddings of complete graphs, J. Combin. TheorySer. B 39 (1985), 353–367.
[89] L.D. James, Operations on hypermaps and outer automorphism, European J. Combin. 9 (1988),551–560.
[90] S. Jendrol’, R. Nedela and M. Skoviera, Constructing regular maps and graphs from planar quo-tients, Math. Slovaca 47 (1997), 155–170.
[91] G.A. Jones and D. Singerman, Theory of maps on orientable surfaces, Proc. London Math. Soc.(3) 37 (1978), 273–307.
[92] G.A. Jones and J.S. Thornton, Operations on maps, and outer automorphisms, J. Combin. TheorySer. B 35 (1983), 93–103.
[93] G.A. Jones and S.A. Silver, Suzuki groups and surfaces, J. London Math. Soc. (2) 48 (1993),117–125.
[94] G.A. Jones, Enumeration of homomorphisms and surface-coverings, Quart. J. Math. Oxford 46 :2(1995), 485–507.
[95] G.A. Jones and D. Singerman, Belyı functions, hypermaps and Galois groups, Bull. London Math.Soc. 28 (1996), 561–590.
[96] G.A. Jones, Maps on surfaces and Galois groups, Math. Slovaca 47 (1997), 1–33.
[97] G.A. Jones and D.B. Surowski, Regular cyclic coverings of the Platonic maps, European J. Com-bin., 21 (2000), 407–418.
[98] G.A. Jones, Maps, hypermaps and quotients of triangle groups in Symmetry in graphs, maps andcomplexes, Abstracts of the workshop SIGMAC’98, S. Wilson ed., Flagstaff, Northern ArizonaUniv., 1998, 11–12.
[99] G.A. Jones, Automorphisms and regular embeddings of merged Johnson graphs, European J.Combin. 26 (2005), 417–435.
[100] G.A. Jones, R. Nedela M. Skoviera, Complete bipartite maps with unique embeddings, Submitted.
[101] G.A. Jones, R. Nedela M. Skoviera, Regular Embeddings of Kn,n where n is an odd primepower,preprint.
[102] G.A. Jones, R. Nedela, Large groups of automorphisms of compact surfaces with prime negativeEuler characteristic, preprint.
[103] I. Kaplansky, “Commutative Rings”, University of Chicago Press, Chicago, 1974.
[104] F. Klein, Uber die Transform siebenter Ordnung der elliptischen Funktionen, Math. Ann. 14(1878-79), 428–471.
[105] A.W. Knapp, Doubly generated Fuchsian groups, Michigan Math. J. 15 (1969), 289–304.
[106] J.H. Kwak and J. Lee, Isomorphism classes of graph bundles, Can. J. Math. 4 (1990), 747–761.
[107] J.H. Kwak, J.-H. Chun and J. Lee, Enumeration of regular graph coverings having finite abeliancovering transformation group, Siam J. Discrete Math. 11 (1998), 273–285.
[108] J.H. Kwak, Y.S. Kwon, Regular orientable embeddings of complete bipartite graphs, accepted forpublication.
41

[109] J.H. Kwak, Y.S. Kwon, Exponent and switch exponent groups of regular orientable embeddingsof complete bipartite graphs, preprint.
[110] Y.S. Kwon, New regular embeddings of n-cubes Qn, J. Graph Theory 46 (2004), 297–312.
[111] Y.S. Kwon and R. Nedela, Non-existence of nonorientable regular embeddings of n-dimensionalcubes, accepted, Dicsrete Math.
[112] G. Labelle, P. Leroux, Enumeration of (uni- or bicolored) plane trees according to their degreedistribution, Discrete Math. 157 (1996), 227–240.
[113] Ch. Leger and J.-C. Terrasson , The action of the symmetric group S3 on the set of isomorphismclasses of tesselations of closed surfaces, Comptes Rendues Acad. Sci. Paris, Ser. I Math. 302(1986), 39–42, (french).
[114] L.I. Leifman and D.J. Johnson (editors), “The Kourovka Notebook - Unsolved Problems in GroupTheory”, American Math. Soc., Providence, 1983. (Seventh Augumented Edition)
[115] C.H. Li and J. Siran, Regular maps whose groups do not act faithfully on vertices, edges, or faces,European J. Combin. 26 (2005), 521–541.
[116] C.H. Li and J. Siran, Mobius regular maps, Submitted.
[117] C.H. Li and J. Siran, Quasiprimitive regular maps, Submitted.
[118] S. Lins, Graph encoded maps, J. Combin. Theory B 32 (1982), 171–181.
[119] V.A. Liskovets, A census of nonisomorphic planar maps, in “Algebraic methods in graph theory”,Vol. II, editors L. Lovasz and V.T. Sos, North-Holland, Amsterdam, 1981.
[120] V.A. Liskovets, T.R. Walsh, The enumeration of non-isomorphic 2-connected planar maps, Canad.J. Math. 35 (1983), 417–435.
[121] V.A. Liskovets, Enumeration of nonisomorphic planar maps, Selecta Math. Sovietica 4 (1985),303–323.
[122] V.A. Liskovets, A reductive technique for enumerating non-isomorphic planar maps, DiscreteMath. 156 (1996), 197–217.
[123] V.A. Liskovets, Reductive enumeration under mutually orthogonal group actions, Acta Appl. Math.52 (1998), 91–120.
[124] Y.P. Liu, Some enumerating problems of maps with vertex partition, Kexue Tongbao Sci. Bul.,English Ed. 31 (1986), 1009–1014.
[125] Y.P. Liu, “Enumerative theory of maps”, Kluwer Academic Publishers, London, 1999.
[126] L. Lıskova, M. Macaj, M. Skoviera, Regular maps from Cayley graphs III: t-Balanced Cayleymaps, preprint.
[127] M.L. Lopez, Residual finiteness of surface groups via tesselations, Discrete Comput. Geom. 11(1994), 201–211.
[128] A.M. MacBeath, Generators of linear fractional groups, in Proc. Sympos. Pure Math., vol. XII,Amer. Math. Soc., Providence, R.I., 1969, 14–32.
[129] A. Machi, On the complexity of a hypermap, Discrete Math. 42 (1982), 221–226.
[130] A. Machi, Homology of hypermaps, J. London Math. Soc. 31 (1985), 10–16.
[131] W. Magnus, “Non-Euclidean Tesselations and their Groups”, Academic Press, New York, 1984.
[132] I. Malcev, On the faithful representation of infinite groups by matrices, Mat. Sb. 8 (50) (1940),405–422, (Russian).
42

[133] I. Malcev, On the faithful representation of infinite groups by matrices, Amer. Math. Soc. Transl.45 (2) (1940), 1–18.
[134] G. Malle, J. Saxl and T. Weigel, Generators of classical groups, Geom. Dedicata 49 (1994), 85–116.
[135] C. MacLachlan, A bound for the number of automorphisms of a compact Riemann surface, J.London Math. Soc. 44 (1969), 265–272.
[136] P. McMullen, B. Monson, A.I. Weiss, Regular maps constructed from linear groups, European J.Combin. 14 (1993), 541–552.
[137] A. Malnic, Group actions, coverings and lifts of automorphisms, Discrete Math. 182 (1998), 203–218.
[138] A. Malnic, R. Nedela and M. Skoviera, Lifting graph automorphisms by voltage assignments,European J. Combin. 21 (2000), 927–947.
[139] A. Malnic, Action graphs and coverings, Discrete Math. 244 (2002), 203–218.
[140] A. Malnic, R. Nedela and M. Skoviera, Regular homomorphisms and regular maps, European J.Combin. 23 (2002), 449–461.
[141] A. Malnic, D. Marusic and P. Potocnik, Elementary abelian covers of graphs, J. Algebraic Combin.20 (2005),71–97.
[142] A. Mednykh and R. Nedela, Enumeration of unrooted maps with given genus, Submitted.
[143] D. Marusic, R. Nedela, Maps and half-transitive graphs of valency 4, European J. Combin. 19(1998), 345–354.
[144] G. A. Miller, Groups defined by the orders of two generators and the order of their product, Amer.J. Math. 24 (1902), 96–106.
[145] B. Mohar, Face-width of embedded graphs, Math. Slovaca 47 (1997), 35–63.
[146] B. Mohar and C. Thomassen, “Graphs on surfaces”, Johns Hopkins Univ. Press, Baltimore, 2001.
[147] R. Nedela and M. Skoviera, Which generalized Petersen graphs are Cayley graphs?, J. GraphTheory 19 (1995), 1–11.
[148] R. Nedela and M. Skoviera, Regular maps of canonical double coverings of graphs, J. Combin.Theory B 67 (1996), 249–277.
[149] R. Nedela and M. Skoviera, Regular maps from voltage assignments and exponent groups, Europ.J. Combin. 18 (1997), 807–823.
[150] R. Nedela and M. Skoviera, Exponents of orientable maps, Proc. London Math. Soc. (3) 75 (1997),1–31.
[151] R. Nedela and M. Skoviera, Regular maps on surfaces with large planar width, European J. Com-bin. 22 (2001), 243–261.
[152] R. Nedela, M. Skoviera, A. Zlatos, Bipartite maps, Petrie duality and exponent groups,info Col-lection of papers published in honour of M. Pezzana, edited by C. Galliardi, Atti Sem. Mat. Fis.Univ. Modena, Suppl. 49 (2001), 109–133.
[153] R. Nedela and M. Skoviera, Cayley snarks and almost simple groups, Combinatorica 21 (2001),583–590.
[154] R. Nedela, M. Skoviera, A. Zlatos, Regular embeddings of complete bipartite graphs, DiscreteMath. 258 (2002), 379–381.
[155] R.B. Richter, J. Siran, R. Jajcay, T. W. Tucker and M. C. Watkins, Cayley maps, submitted toJ. Combin. Theory B.
43

[156] G. Ringel, “Map Color Theorem”, Springer, 1974.
[157] N. Robertson and P. D. Seymour, Graph minors. VII. Disjoint paths on a surface, J. Combin.Theory B 45 (1988), 212–254.
[158] N. Robertson and R. P. Vitray, Representativity of surface embeddings, in Paths, Flows, andVLSI-Layout, eds. B. Korte, L. Lovasz, H. J. Promel, and A.Schrijver, Springer-Verlag, Berlin,1990, 293–328.
[159] D.J.S. Robinson, “A course in group theory” (Second edition), Springer-Verlag, New York, 1995.
[160] J.J. Rotman, “An Introduction to the Theory of Groups”, 4th Edition, Springer-Verlag, Berlin,1995.
[161] C.H. Sah, Groups related to compact Riemann surfaces, Acta Math. 123 (1969), 13–42.
[162] P.G. Scott, Subgroups of surface groups are almost geometric, J. London Math. Soc. (2) 17 (1978),555–565.
[163] F.A. Sherk, The regular maps on a surface of genus three, Canad. J. Math. 11 (1959), 452–480.
[164] F.A. Sherk, A family of regular maps of type 6, 6, Canad. Math. Bull. 11 (1962), 13–20.
[165] L. Schneps (ed.), “The Grothendieck Theory of Dessins d’Enfants”, London Math. Soc. LectureNote Series 200, Cambridge University Press, Cambridge, 1994.
[166] W.Ch. Schroeder and D.B. Surowski, Regular cyclic coverings of regular affine maps, European J.Combin. 24 (2003), 1045–1080.
[167] D. Singerman, Finitely Maximal Fuchsian groups, J. London Math. Soc. (2) 6 (1972), 29–38.
[168] D. Singerman and R. Syddall, Platonic surfaces, in Symmetry in graphs, maps and complexes,Abstracts of the workshop SIGMAC’98, S. Wilson ed., Flagstaff, Northern Arizona Univ., 1998,29–30.
[169] D. Singerman, Belyi functions and hypermaps, in Topics in Riemann surfaces and Fuchsian groups(Conference to celebrate the 25th anniversary of UNED).
[170] N.J.A. Sloane and S. Plouffe, “The Encyclopedia of Integer Sequences”, Academic Press, SanDiego (1995).
[171] J. Siran and M. Skoviera, Regular maps from Cayley graphs. II Antibalanced Cayley maps, DiscreteMath. 124 (1994), 179–191.
[172] J. Siran, Triangle group representations and their applications to graphs and maps, Discrete Math.229 (1-3) (2001), 341–358.
[173] J. Siran, Triangle group representations and constructions of regular maps, Proc. London Math.Soc. 109 (2001), 1–34.
[174] M. Skoviera and J. Siran, Regular maps from Cayley graphs. I: Balanced Cayley maps, DiscreteMath. 109 (1992), 265–276.
[175] D.B. Surowski, Lifting map automorphisms and MacBeath’s theorem, J. Combin. Theory B 50(1988), 135–149.
[176] D.B. Surowski and G.A.Jones, Cohomological constructions of regular cyclic coverings of the Pla-tonic maps, European J. Combin. 21 (2000), 407–418.
[177] D.B. Surowski, Liftings of automorphisms of hypermaps, Discrete Math. 215 (2000), 213–224.
[178] D.B. Surowski, W.Ch. Schroeder, Homological methods in algebraic map theory, European J.Combin. 24 (2003), 1003-1044.
44

[179] C. Thomassen, Embeddings of graphs with no short noncontractible cycles, J. Combin. Theory B48 (1990), 155–177.
[180] W.T. Tutte, A census of planar maps, Canad. J. Math. 15 (1963), 249–271.
[181] W.T. Tutte, The number of planted plane trees with a given partition, Amer. Math. Monthly 71(1964), 64–74.
[182] W.T. Tutte, On the enumeration of planar maps, Bull. Amer. Math. Soc. 74 (1968), 64–74.
[183] A. Vince, Combinatorial maps, J. Combin. Theory B 34 (1983), 1–21.
[184] A. Vince, Regular combinatorial maps, J. Combin. Theory B 35 (1983), 256–277.
[185] A. Vince, Flag transitive maps, Congr. Numer. 45 (1984), 235–250.
[186] D. Walkup, The number of plane trees, Mathematika 19 (1972), 200–204.
[187] T.R.S. Walsh et A.B. Lehman, Counting rooted maps by genus I, J. Combin. Theory B 13 (1972),192–218.
[188] T.R.S. Walsh et A.B. Lehman, Counting rooted maps by genus II, J. Combin. Theory B 14 (1973),122–141.
[189] T.R.S. Walsh, Hypermaps versus bipartite maps, J. Combin. Theory B 18 (1975), 155–163.
[190] T.R.S. Walsh, Generating nonisomorphic maps without storing them, SIAM J. Algebraic Discretemethods 4 (1983), 161–178.
[191] A.T. White, Strongly symmetric maps in Graph Theory and Combinatorics, ed. R. J. Wilson,Research Notes in Math. 34, Pitman, London, 1979, 106–132.
[192] A.T. White, “Graphs, Groups and Surfaces”, North-Holland, Amsterdam, 1984, Second Edition.
[193] A.T. White, Cayley maps, Congr. Numer. 115 (1996), 105–130.
[194] A.T. White, “Graphs of groups on surfaces”, North-Holland, Amsterdam, 2001.
[195] S.E. Wilson, Riemann surfaces over regular maps, Canad. J. Math. 30 (1978), 763–782.
[196] S.E. Wilson, The smallest nontoroidal chiral maps, J. Graph Theory 2 (1978), 315–318.
[197] S.E. Wilson, Operators over regular maps, Pacific J. Math. 81 (1979), 559–568.
[198] S.E. Wilson, Bicontactual regular maps, Pacific J. Math. 120 (1985), 437–451.
[199] S.E. Wilson, A construction from an existence proof, Congr. Numer. 50 (1985), 25–30.
[200] S.E. Wilson, Cantankerous maps and rotary embeddings of Kn, J. Combin. Theory B 47 (1989),262–273.
[201] S.E. Wilson, Smooth coverings of regular maps, London Math. Soc. Lecture Note Series, 165,Cambridge Univ. Press, Cambridge, 1992, 480–489.
[202] S.E. Wilson, Applications and refinements of Vince’s construction, Geom. Dedicada 48 (1993),231–242.
[203] S.E. Wilson, Parallel products in groups and maps, J. Algebra 167 (1994), 539–546.
[204] S.E. Wilson, Edge-transitive maps and non-orientable surfaces, Math. Slovaca 47 (1997), 65–83.
[205] S.E. Wilson and A. Breda d’Azevedo, Surfaces having no regular hypermaps, Discrete Math. 277(2004), 241–274.
[206] N.C. Wormald, Counting unrooted planar maps, Discrete Math. 36 (1981), 205–225.
45

[207] N.C. Wormald, On the number of planar maps, Canad. J. Math. 33 (1) (1981), 1–11.
[208] H. Zieschang, Lifting and projecting homeomorphisms, Arch. Math. 24 (1973), 416–421.
[209] H. Zieschang, E. Vogt, H.-D. Coldewey, “Surfaces and Planar Discontinuous Groups” LectureNotes in Mathematics 835, Springer-Verlag, Berlin, 1980.
46