Multistate Travel Time Reliability Models with Skewed Component Distributions
7
47 Transportation Research Record: Journal of the Transportation Research Board, No. 2315, Transportation Research Board of the National Academies, Washington, D.C., 2012, pp. 47–53. DOI: 10.3141/2315-05 Virginia Tech Transportation Institute, Virginia Polytechnic Institute and State Univer- sity, 3500 Transportation Research Plaza, Blacksburg, VA 24061. Corresponding author: F. Guo, [email protected]. simultaneously (4, 5). Besides substantial improvement in fitting travel time data, the model also provides estimates of the probabil- ity of encountering traffic congestion as well as travel time delay metrics for each state. The model provides the opportunity for an easy-to-understand, two-step travel time reporting mechanism with both the probability and magnitude of delay. One of the most attractive features of the multistate travel time model is its relationship with the underlying traffic conditions. Park et al. showed that travel time states are closely related to the traffic fundamental diagram, that is, the relationship between traffic flow, speed, and density (5). Besides the free-flow and congested states, the model can also accommodate delay caused by traffic incidents (6). Existing studies on travel reliability modeling, however, have only considered normal component distributions. There are several potential issues with this method. First, the support of the normal distribution covers the entire real number line, which conflicts with the fact that travel time is strictly positive, usually with a positive lower bound. This aspect could be problematic when travel time is relatively short. Second and more important, the normal distribu- tion is symmetric around the mean. Previous studies have shown that skewness is an important characteristic of travel time and com- monly appears in congested traffic conditions (7, 8). The multistate normal (MS-normal) model cannot fit the data satisfactorily when the distribution of travel time within a state is skewed. Use of the MS-normal travel time reliability model is advanced by allowing skewed component distributions, in particular the log- normal and gamma distributions. The primary objective is to com- pare the performance of existing single- and multistate models and to recommend appropriate model conditioning on specific traffic situ- ations. The impact on the travel time reliability index when skewed component distributions are used is also evaluated. The methodology section provides the proposed models and the model comparison criterion. The model implementation and com- parison are then conducted by using field data collected along a section of the I-35 freeway in San Antonio, Texas. METHODOLOGY Model Formulation Three basic component distributions were evaluated: the normal, gamma, and lognormal distributions. All three models have been investigated in travel time reliability research and the lognormal distribution has been shown to fit the field data best (1, 2). Both gamma and lognormal distributions can be skewed and have sup- port on (0, ∞). In contrast, the normal distribution is symmetric about the mean and has support on (−∞, +∞). The formulation and key parameters of the three distributions are summarized in Table 1. Multistate Travel Time Reliability Models with Skewed Component Distributions Feng Guo, Qing Li, and Hesham Rakha The multistate travel time reliability model has demonstrated supe- rior performance, a close relationship with underlying traffic condi- tions, and ease of interpretation for travel time reliability reporting. This study advances the multistate model by using skewed component distributions—for example, the gamma and lognormal distributions— to accommodate nonsymmetrically distributed travel times, which are commonly observed in congested states. Six alternative models, the single-state normal, gamma, and lognormal distributions and their multistate versions, were fitted to field-collected data. The performance of the models was compared with Akaike’s information criterion. The results indicate that the multistate lognormal model consistently outperforms alternative models, especially during peak hours. The improved fitting of the lognormal model is mainly reflected in the mode and tail portion of the data distribution. During off-peak hours, the single-state model could provide a compatible but parsimonious alterna- tive to multistate models. The impact of using the multistate lognormal model is demonstrated on travel time reliability reporting by using the travel time buffer index. The study concludes that the multistate log- normal model is the optimal alternative model for modeling travel time under moderate to heavy traffic conditions along freeways. Travel time is random in nature, and the variability of travel time is especially substantial under congested traffic conditions. The uncer- tainty associated with travel time induces high social, individual traveler, and environmental costs. To quantitatively model travel time uncertainty is critical for assessing the reliability of a transportation system and assisting travelers in making trip decisions. Because of the random nature of travel time, stochastic models have been widely used in travel time reliability modeling. Stochastic models assume that travel time is generated from a random process, which could be affected by many factors. Previous studies have used a standard single-mode distribution to model travel time (1–3). These studies in general concluded that the lognormal model fits travel time distributions better than alternative single-mode distribu- tions. One limitation of single-mode distributions is the assumption that travel time is the result of a single and relatively stable traffic condition. Thus single-mode distributions usually provide a poor fit for travel time data observed from complex travel conditions, such as those during peak traffic hours. The multistate travel time reliability model overcomes the limita- tion of the single-state model by allowing multiple travel time states
Transcript of Multistate Travel Time Reliability Models with Skewed Component Distributions

47
Transportation Research Record: Journal of the Transportation Research Board, No. 2315, Transportation Research Board of the National Academies, Washington, D.C., 2012, pp. 47–53.DOI: 10.3141/2315-05
Virginia Tech Transportation Institute, Virginia Polytechnic Institute and State Univer-sity, 3500 Transportation Research Plaza, Blacksburg, VA 24061. Corresponding author: F. Guo, [email protected].
simultaneously (4, 5). Besides substantial improvement in fitting travel time data, the model also provides estimates of the probabil-ity of encountering traffic congestion as well as travel time delay metrics for each state. The model provides the opportunity for an easy-to-understand, two-step travel time reporting mechanism with both the probability and magnitude of delay.
One of the most attractive features of the multistate travel time model is its relationship with the underlying traffic conditions. Park et al. showed that travel time states are closely related to the traffic fundamental diagram, that is, the relationship between traffic flow, speed, and density (5). Besides the free-flow and congested states, the model can also accommodate delay caused by traffic incidents (6).
Existing studies on travel reliability modeling, however, have only considered normal component distributions. There are several potential issues with this method. First, the support of the normal distribution covers the entire real number line, which conflicts with the fact that travel time is strictly positive, usually with a positive lower bound. This aspect could be problematic when travel time is relatively short. Second and more important, the normal distribu-tion is symmetric around the mean. Previous studies have shown that skewness is an important characteristic of travel time and com-monly appears in congested traffic conditions (7, 8). The multistate normal (MS-normal) model cannot fit the data satisfactorily when the distribution of travel time within a state is skewed.
Use of the MS-normal travel time reliability model is advanced by allowing skewed component distributions, in particular the log-normal and gamma distributions. The primary objective is to com-pare the performance of existing single- and multistate models and to recommend appropriate model conditioning on specific traffic situ-ations. The impact on the travel time reliability index when skewed component distributions are used is also evaluated.
The methodology section provides the proposed models and the model comparison criterion. The model implementation and com-parison are then conducted by using field data collected along a section of the I-35 freeway in San Antonio, Texas.
Methodology
Model Formulation
Three basic component distributions were evaluated: the normal, gamma, and lognormal distributions. All three models have been investigated in travel time reliability research and the lognormal distribution has been shown to fit the field data best (1, 2). Both gamma and lognormal distributions can be skewed and have sup-port on (0, ∞). In contrast, the normal distribution is symmetric about the mean and has support on (−∞, +∞). The formulation and key parameters of the three distributions are summarized in Table 1.
Multistate Travel Time Reliability Models with Skewed Component Distributions
Feng Guo, Qing Li, and Hesham Rakha
The multistate travel time reliability model has demonstrated supe-rior performance, a close relationship with underlying traffic condi-tions, and ease of interpretation for travel time reliability reporting. This study advances the multistate model by using skewed component distributions—for example, the gamma and lognormal distributions— to accommodate nonsymmetrically distributed travel times, which are commonly observed in congested states. Six alternative models, the single-state normal, gamma, and lognormal distributions and their multistate versions, were fitted to field-collected data. The performance of the models was compared with Akaike’s information criterion. The results indicate that the multistate lognormal model consistently out performs alternative models, especially during peak hours. The improved fitting of the lognormal model is mainly reflected in the mode and tail portion of the data distribution. During off-peak hours, the single-state model could provide a compatible but parsimonious alterna-tive to multi state models. The impact of using the multistate lognormal model is demonstrated on travel time reliability reporting by using the travel time buffer index. The study concludes that the multistate log-normal model is the optimal alternative model for modeling travel time under moderate to heavy traffic conditions along freeways.
Travel time is random in nature, and the variability of travel time is especially substantial under congested traffic conditions. The uncer-tainty associated with travel time induces high social, individual traveler, and environmental costs. To quantitatively model travel time uncertainty is critical for assessing the reliability of a transportation system and assisting travelers in making trip decisions.
Because of the random nature of travel time, stochastic models have been widely used in travel time reliability modeling. Stochastic models assume that travel time is generated from a random process, which could be affected by many factors. Previous studies have used a standard single-mode distribution to model travel time (1–3). These studies in general concluded that the lognormal model fits travel time distributions better than alternative single-mode distribu-tions. One limitation of single-mode distributions is the assumption that travel time is the result of a single and relatively stable traffic condition. Thus single-mode distributions usually provide a poor fit for travel time data observed from complex travel conditions, such as those during peak traffic hours.
The multistate travel time reliability model overcomes the limita-tion of the single-state model by allowing multiple travel time states

48 Transportation Research Record 2315
The multistate model can be based on various component distri-butions. The two-component multistate models based on the nor-mal, gamma, and lognormal distributions are as follows. All three models use the following common notations: λ is the mixture pro-portion, that is, the probability of travel in the first travel time state; and T is the travel time.
MS-normal model:
f T e
T
λ µ µ σ σ λπσ
µ
σ, , , ,1 2 1 2
1
21
21
12
12( ) = + −
−( )
λλπσ
µ
σ( )−( )
1
21
2
2
22
22
e
T
( )
where (µ1, σ1) and (µ2, σ2) are the mean and standard deviation of the first and second component distributions, respectively.
MS-lognormal model:
f TT
eT
λ µ µ σ σ λπ σ
µσ, , , ,
ln
1 2 1 2
1
21
2
12
1( ) =− −( )
22
22
22
11
22
2
2+ −( )− −( )
λπ σ
µσ
Te
Tln
( )
where (µ1, σ1) and (µ2, σ2) are the location and scale parameters of the first and second component distributions, respectively. The mean and standard deviation of the lognormal distribution are a function of (µ1, σ1) and (µ2, σ2), as shown in Table 1.
MS-gamma model:
f T T e Tλ α α β β λ βα
αα β, , , ,1 2 1 2
1
1
11
1 1( ) =( )
+− −
Γ11
3
2
2
12
2 2−( )( )
− −λ βα
αα β
ΓT e T
( )
where (α1, β1) and (α2, β2) are the shape and scale parameters for the first and second component distributions, respectively.
The multistate models were fitted by using the expectation and maximization algorithm (9).
Model Comparison Using Akaike Information Criterion
Multistate models are more complex than single-state models. A two-component lognormal multistate model contains five param-
eters compared with two parameters for a regular lognormal model. In general, complex models will fit the data better than simple mod-els. However, the benefits in model fitting might not outweigh the extra model complexity. As an extreme example, a saturated model with the same number of parameters as the data points will provide a perfect fit. However, this saturated model suffers from poor pre-dictability and interpretability. The model comparison thus should consider both the fitting for data and model parsimony. The Akaike information criterion (AIC) combines goodness of fit for the data and a penalty for model complexity and thus provides a balanced model assessment measure (10). The AIC is defined as
AIC = − ( )( )2 2p Lln pMLE
where
L(•) = likelihood function, pMLE = maximum likelihood estimate of model parameters p, L(pMLE) = maximized likelihood function, and p = number of parameters.
The term −L(pMLE) measures the fitting of the data and smaller values indicate a better fitting (because of the negative sign). The term 2p penalizes the model complexity. A smaller AIC indicates a preferred model. It is well established in the statistics literature that a difference in AIC greater than 4 indicates a significant difference between two models (11).
Model ApplICAtIon And CoMpArIson
The six alternative models discussed in the section on model formu-lation were applied to a data set collected on Interstate 35 near San Antonio, Texas (4). The study corridor covers a 16-km section with an average daily traffic volume around 150,000 vehicles. The travel time was collected when vehicles tagged with a radio frequency device passed the automatic vehicle identification stations on New Braunfels Avenue (Station 42) and O’Connor Road (Station 49).
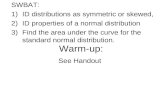
To illustrate the advantage of the multistate model, the histogram of travel time during the morning peak hour (7:00 to 8:00 a.m.) is overlaid with the fitted densities of the three alternative multistate models (Figure 1). The histogram shows two distinct modes, the free-flow state and a state with delayed traffic, which supports the use of multistate models. Among the three multistate models, the MS-normal model shows obvious lack of fit, which is reflected in the mode and tail part of the data distribution. First and most important, the
TABLE 1 Component Distributions
Distribution Density FunctionMean and Standard Deviation (SD) Skewness
Normal
1
2
2
22
πσ
µσe
T−( ) Mean: µSD: σ
0
Gamma
βα
αα β
Γ( )− −T e T1 Mean:
SD:
α β
α β2 α
Lognormal
1
2
2
22
π σ
µσ
Te
T−
−( )ln Mean:
SD:
e
e e
µ σ
σ µ σ
+
+−
2
2
2
2 21
e eσ σ2 21 2− +( )
Note: T = travel time.

Guo, Li, and Rakha 49
MS-normal model fails to capture the mode of the congested state, whereas the two proposed skewed models provide a much better fit. Second, the MS-normal model has a considerable probability mass near the left tail where travel time is less than 500 s.
Because the histogram is subject to the influence of a predefined bin width, a quintile–quintile (QQ) plot was used to further examine
the goodness of fit for alternative models (Figure 2). The QQ plot compares the quartile of the theoretical distribution with the quartile of data. A model with a QQ plot sufficiently close to the diagonal line provides satisfactory fitting for the data. As can be seen, the single-state lognormal model fits the data the worst and the MS-lognormal model provides the best fit for the data. The two skewed models fit
400 600 800 1000 1200 1400 1600
0.00
0 0.
001
0.00
2 0.
003
0.00
4 0.
005
Travel time (seconds)
Den
sity
MS-Lognormal MS-Gamma MS-Normal
FIGURE 1 Densities of multistate models for peak hour (7:00 to 8:00 a.m.).
600 800 1000 1200 1400
600
800
1000
12
00
1400
Percentiles of data (sec)
Per
cent
iles
of fi
tted
dist
ribut
ion
(sec
)
MS-lognormal MS-gamma MS-normal SS-lognormal Diagonal
FIGURE 2 QQ plot for peak hour (7:00 to 8:00 a.m.) (SS 5 single state).

50 Transportation Research Record 2315
the data better for travel times longer than 800 s, which corresponds to the congested travel time state. These results are consistent with the results from the comparison of density and histogram.
This lack of fit is mainly due to the inconsistency between the sym-metric characteristic of the normal component distribution and the skewed nature of the travel time distribution within a specific state. Previous studies have confirmed that travel time rarely follows a sym-metric distribution (7, 8). The results from this study confirmed that even within a travel time state, especially the congested state, the distribution is skewed.
Since the travel time distribution is expected to vary with time of day, the proposed models were fitted to travel times observed in each hour. The AICs for all six alternative models and sample size by time of day are shown in Table 2. As can be seen, there is a reasonably large sample size in each hour ranging from 100 to more than 400 samples. For any given time period, the model with the smallest AIC has the best performance in terms of fitting for the data and model parsimony. Since models with an AIC dif-ference less than 4 are not significantly different from each other, all models were marked within 4 AIC units of the best model. The optimal models or groups of optimal models are noted in Table 2. Table 2 provides information for several subsequent model comparisons.
Comparison Between single-state and Multistate Models
For ease of comparison, the MS-normal model was used as a bench-mark. The AICs of the alternative models were subtracted from the AIC of the MS-normal model. The AIC difference is calculated as follows:
AIC difference AIC alternative modelAIC MS
= ( )− --normal model( )
Because a smaller AIC indicates a better model, a smaller AIC difference also indicates a better model. An alternative model is significantly better than the MS-normal model if the AIC differ-ence is less than −4 and significantly worse if the AIC difference is greater than 4. Two alternative models can also be compared: if the gap between the values of the AIC difference is greater than 4, the two models are significantly different from each other.
The AIC difference is shown in Figure 3. The most striking pat-tern is the dramatic fluctuation of the AIC difference for single-state models. At night, the single state is comparable with the MS-normal models. However, during the daytime, the multistate models out-performed the single-state model by a large margin. The difference is particularly substantial during the morning and evening peak hours.
The multistate model is more complex than a single-state model. For off-peak hours with small traffic volumes, only one travel time state may exist. The benefit of a multistate model could be limited for this situation. As indicated in Table 2 and Figure 3, from 7:00 p.m. to 6:00 a.m., the MS-lognormal model is not significantly better than the single-state model (AIC difference less than 4).
The parameter estimates for the MS-lognormal are plotted in Fig-ure 4. As can be seen, the model parameters for the two component distributions are very similar at night. The 95th percentile (Q95) was also calculated as a travel time reliability index based on both the first and second component distributions. The Q95 values differ sub-stantially during the day but are almost identical during the 7:00 p.m. to 6:00 a.m. time frame.
The foregoing results suggest that under conditions of low traffic volume, such as during the night, there might exist only one travel time state. A parsimonious single-state model could sufficiently model the travel time uncertainty. However, using multistate models will not
TABLE 2 Model Comparison Based on Akaike Information Criterion
Single State Multistate
Time N Normal Gamma Lognormal Normal Gamma Lognormal
Midnight–1 a.m. 120 1,258 1,250 1,246 1,216a 1,217a 1,215a
1–2 a.m. 108 1,067a 1,068a 1,068a 1,072a 1,078 1,069a
2–3 a.m. 152 1,459a 1,460a 1,461a 1,461a 1,468 1,461a
3–4 a.m. 160 1,617a 1,617a 1,618a 1,616a 1,622 1,616a
4–5 a.m. 169 1,731a 1,733a 1,735a 1,735a 1,745 1,735a
5–6 a.m. 236 2,412a 2,414a 2,415a 2,415a 2,420 2,415a
6–7 a.m. 336 3,593 3,562 3,547 3,532 3,513 3,502a
7–8 a.m. 427 6,014 5,901 5,846 5,706 5,659 5,643a
8–9 a.m. 299 4,501 4,382 4,320 4,058 4,037a 4,033a
9–10 a.m. 191 2,494 2,407 2,331 2,089a 2,088a 2,089a
10–11 a.m. 226 2,474 2,459 2,452 2,422a 2,424a 2,423a
11 a.m.–noon 193 2,415 2,352 2,306 2,078a 2,080a 2,081a
Noon–1 p.m. 171 1,734 1,730 1,728 1,721a 1,746 1,721a
1–2 p.m. 178 1,798a 1,796a 1,795a 1,799a 1,814 1,798a
2–3 p.m. 169 2,047 2,002 1,971 1,813a 1,813a 1,813a
3–4 p.m. 135 1,852 1,786 1,726 1,553 1,547a 1,546a
4–5 p.m. 148 1,803 1,771 1,751 1,675 1,671a 1,670a
5–6 p.m. 146 1,805 1,785 1,775 1,731a 1,730a 1,730a
6–7 p.m. 150 1,591 1,583 1,579 1,584 1,582 1,577a
7–8 p.m. 146 1,458a 1,457a 1,457a 1,457a 1,462 1,457a
8–9 p.m. 127 1,276a 1,277a 1,278a 1,278a 1,283 1,278a
9–10 p.m. 97 986a 988a 989a 989a 994 989a
10–11 p.m. 93 928a 929a 930a 932a 939 931a
11 p.m.–midnight 102 1,057a 1,061 1,063 1,052a 1,059 1,053a
aModel with smallest AIC value, or within 4 of smallest AIC value. These are optimal models.

Guo, Li, and Rakha 51
have a negative impact since both components will produce similar travel time reliability indexes.
Comparison Between MS-Normal and Skewed Multistate Models
As is clear in Table 2, the MS-lognormal model is consistently the optimal model or in the optimal model group. An in-depth com-
parison was conducted for evaluating the performance of the three multistate models under different traffic conditions. The MS-normal model was again chosen as the benchmark model and the AIC dif-ference between the skewed models was examined. The variation of the AIC difference by time of day is illustrated in Figure 5.
The advantage of the two skewed multistate models is most obvi-ous during the morning peak hours (6:00 to 8:00 a.m.) and evening peak hours (3:00 to 5:00 p.m.). The cause of this phenomenon is that the distribution of travel time in the congested state is skewed as
FIGURE 3 AIC difference between MS-normal and alternative models.
(a) (b)
(c) (d)
FIGURE 4 MS-lognormal model parameter estimates: (a) mean of mixture distributions, (b) standard deviation (SD) of mixture distributions, (c) mixture coefficient, and (d) travel time.
FIGURE 5 AIC difference between MS-normal and alternative models.

52 Transportation Research Record 2315
shown in Figure 1. The MS-normal model does not fit this situation because of the symmetric nature of normal component distributions. The skewed multistate models provide a better fit for skewed data.
The performance of the MS-gamma model is not stable. In a num-ber of off-peak hours, the performance of the MS-gamma model is inferior to that of the MS-normal model. Since its performance is consistently worse than that of the MS-lognormal model, the MS-gamma model is not recommended for travel time modeling.
Impact on Travel Time Reliability Reporting
The MS-lognormal model outperforms the MS-normal model as measured by the AIC. The improvement is mainly reflected in the fitting of the tails and modes. It is expected that use of the skewed multistate models will have considerable influence on the reporting of travel time reliability. This impact was evaluated with one of the most widely used reliability measures, the buffer time index, which is defined as follows (12):
buffer index95th percentile mean
mean= −
Because of the similar performance between single- and multi-state models at night, models were examined only for the daytime (7:00 a.m. to 6:00 p.m.) (Figure 6). As can be seen, the results from the MS-lognormal model are consistently closer to the buffer index calculated from the data. Other metrics such as the 95th percentile were also compared and the results were similar to those of the buf-fer time index. The results indicate that using the MS-normal model could lead to an overly conservative estimate for the uncertainty of travel time in congested traffic conditions.
DISCuSSIoN aND CoNCluSIoN
The multistate model provides a flexible and powerful framework for travel time reliability modeling and reporting. It is especially useful for modeling travel times under complex traffic conditions.
The direct relationship with underlying traffic conditions makes it a useful tool to evaluate the sources of travel time uncertainty (5). The multistate models were advanced by proposing skewed com-ponent distributions. Six alternative models, namely, single-state normal, gamma, and lognormal and their multistate versions, were evaluated. The following major conclusions were derived.
Multistate models outperform single-state models in congested or near-congested traffic conditions. The advantage of multistate models is substantial in congested traffic conditions. However, for conditions of low traffic volume, there might exist only one travel time state and single-state models can be a sufficient and parsimonious alternative. Nonetheless, multistate models will pro-vide essentially the same travel time reliability index under the uncongested state.
The skewed multistate models provide superior model fit for travel times during peak hours, that is, moderate to congested states. The improvement over the MS-normal model is mainly reflected in the mode and tail of travel time distributions. The skewness of travel time can be attributed to macro- and microlevel causes. The macro-level skewness is caused by the uneven distribution of travel time in the uncongested and congested states. The majority of previous studies evaluated the skewness at the macro level (7, 8). Multistate models are designed to accommodate the macrolevel skewness and outperform single-state models by a large margin as indicated by the current and previous studies (4, 5). Alternatively, the microlevel skewness is the skewness of the travel time distribution within a specific state. This study confirmed that the distribution of travel time within a specific state also tends to be skewed, demonstrating the existence of microlevel skewness. This result extends existing research on the skewness of travel time distributions.
Appropriate component distributions have a considerable impact on the travel time reliability index, for example, the buffer time index. In particular, the MS-lognormal model can help address the overly conservative estimate of the buffer time index from MS-normal models.
Finally, the MS-lognormal model consistently outperforms alternative models and is recommended for travel time reliability modeling.
There are several potential extensions to the current research. Using traffic simulation can help the understanding of the source of skewness in travel time data. Current research only includes log-normal and gamma distributions. A number of other distributions, such as the Weibull and extreme value distributions, could also be investigated. Finally, developing a Bayesian multistate travel time reliability framework would greatly increase the flexibility and power of multistate travel time reliability models.
aCkNowleDgMeNT
This research was partially funded by the Mid-Atlantic University Transportation Center.
RefeReNCeS
1. Emam, E. B., and H. M. Al-Deek. Using Real-Life Dual-Loop Detector Data to Develop New Methodology for Estimating Freeway Travel Time Reliability. In Transportation Research Record: Journal of the Trans-portation Research Board, No. 1959, Transportation Research Board of the National Academies, Washington, D.C., 2006, pp. 140–150.
FIGURE 6 Buffer index for congested state.

Guo, Li, and Rakha 53
2. Hesham, R., E.-S. Ihab, A. Mazen, and F. Dion. Estimating Path Travel-Time Reliability. Proc., Intelligent Transportation Systems Conference, 2006 ITSC ’06, IEEE, Toronto, Ontario, Canada, 2006, pp. 236–241.
3. Tu, H., J. W. C. van Lint, and H. J. van Zuylen. Travel Time Reli-ability Model on Freeways. Presented at 87th Annual Meeting of the Transportation Research Board, Washington, D.C., 2008.
4. Guo, F., H. Rakha, and S. Park. Multistate Model for Travel Time Reliability. In Transportation Research Record: Journal of the Trans-portation Research Board, No. 2188, Transportation Research Board of the National Academies, Washington, D.C., 2010, pp. 46–54.
5. Park, S., H. Rakha, and F. Guo. Calibration Issues for Multistate Model of Travel Time Reliability. In Transportation Research Record: Jour-nal of the Transportation Research Board, No. 2188, Transportation Research Board of the National Academies, Washington, D.C., 2010, pp. 74–84.
6. Park, S., H. Rakha, and F. Guo. Multistate Travel Time Reliability Model: Impact of Incidents on Travel Time Reliability. Proc., 14th International Annual Conference on Intelligent Transportation Systems, Washington, D.C., IEEE, 2011.
7. van Lint, J. W. C., and H. J. van Zuylen. Monitoring and Predicting Freeway Travel Time Reliability: Using Width and Skew of Day-to-Day
Travel Time Distribution. In Transportation Research Record: Jour-nal of the Transportation Research Board, No. 1917, Transportation Research Board of the National Academies, Washington, D.C., 2005, pp. 54–62.
8. Van Lint, J. W. C., H. J. van Zuylen, and H. Tu. Travel Time Unreli-ability on Freeways: Why Measures Based on Variance Tell Only Half the Story. Transportation Research Part A, Vol. 42, No. 1, 2008, pp. 258–277.
9. McLachlan, G. J., and D. Peel. Finite Mixture Models. John Wiley and Sons, Inc., New York, 2000.
10. Akaike, H. A New Look at the Statistical Model Identification. IEEE Transactions on Automatic Control, Vol. 19, No. 6, 1974, pp. 716–723.
11. Burnham, K. P., and D. R. Anderson. Model Selection and Multimodel Inference: A Practical Information-Theoretic Approach, 2nd ed. Springer-Verlag, Berlin, 2002.
12. Lomax, T., D. Schrank, S. Turner, and R. Margiotta. Selecting Travel Reliability Measures. FHWA, U.S. Department of Transportation, 2003.
The Traffic Flow Theory and Characteristics Committee peer-reviewed this paper.