Multibody dynamics and numerical models of muscles
17
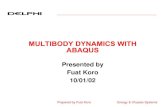
10/2/14 1 Multibody dynamics and numerical models of muscles LORENZO GRASSI Why multibody dynamics? Skeleton of a baseball pitcher during the different phases of a pitch 3D musculotendinous model to simulate the biomechanical effects of rectus femoris transposi9on (3) Kinema9c analysis for the rehabilita9on planning 1. Chao, E.Y. Med Eng Phys, 2003. 25(3) 2. Asakawa, D.S., et al. J Bone Joint Surg Am, 2004. 86-A(2) 3. Leardini, A. et. al. Gait & Posture 26 (2007) 1) 2) 3)
Transcript of Multibody dynamics and numerical models of muscles

10/2/14
1
Multibody dynamics and numerical models of muscles LORENZO GRASSI
Why multibody dynamics?
Skeleton of a baseball pitcher during the different phases of a pitch
3D musculotendinous model to simulate the biomechanical effects of
rectus femoris transposi9on
(3)
Kinema9c analysis for the rehabilita9on planning 1. Chao, E.Y. Med Eng Phys, 2003. 25(3) 2. Asakawa, D.S., et al. J Bone Joint Surg Am, 2004. 86-A(2) 3. Leardini, A. et. al. Gait & Posture 26 (2007)
1) 2)
3)

10/2/14
2
Why multibody dynamics?
Taddei et al., Clin Biomech 27(3) 2012:273-280
• 10 years old patient with high grade Osteosarcoma at the distal left femur
• Osteotomy, and femur reconstructed by means of an intercalary massive bone allograft from fibula
• Many muscles had to be excised/removed/moved
This kid now can play karate!
But it’s a long way to go to get these results…
…let’s start from the beginning!

10/2/14
3
Schematic of a multibody system
The human body is modelled as a number of rigid bodies connected by
ideal joints...
...remember assignments 1 & 2?
Different types of joints in our body

10/2/14
4
Your (very) first tastes of multibody dynamics
Assignment 1…
…and 2
Assignment 1: from motion to forces In our assignment 1, the human leg was modelled with: -‐ 2 rigid bodies (upper and
lower leg) -‐ 2 hinges à 2 dof -‐ movements limited to
the sagi9al plane...
Kinema9cs data were used to calculate joint
forces (but muscles were not considered)

10/2/14
5
…3D is way more complicated!
Ball and socket (3 dof)
Hinge (1 dof)
Hinge (1 dof)
l = number of degrees of freedom of a system
n = # rigid bodies lk = degrees of freedom
for the kth joint
∑ =−−−=
n
k klnl1
)6()1(6(Gruber)
104*53*236
)6()17(6 6
1
=−−
=−−−= ∑ =k kll
For our 3D model:
Solution of assignment 1

10/2/14
6
Assignment 2: redundancy & recruiting
External forces were known, and we used a sta9c op9miza9on
approach to calculate muscular forces
Several muscles act on the same dof: 1. Performing the same joint mo>on (synergist) 2. Neutralizing each other (antagonists)
Features: 1. Repeated movements produce similar aDva>on
pa9erns à pre-‐defined control strategies exist? 2. When the ar>cular load increases, so does the
muscular ac>va>on, up to the tetanic limit
Why are we redundant? 1. Increase articular stability
Weight lifting, execution of new motor tasks, instability.
2. Transferring forces/moments between joints Co-contractions at the hip can produce an increment of the bending moment of the knee (e.g., co-contraction of gluteus maximus and rectus femoris produces knee extension).
3. High accuracy movements Highly accurate and precise finger movements require complex activation patterns
4. Improve movements that require changes in direction
5. Protect the joints in extreme articular positions

10/2/14
7
Static optimization
max
21
int
0
),...,,(
0
)(
FFFFFff
Ff
FqRM
im
nmmm
i mi
MT
≤≤
=
⎪⎩
⎪⎨
⎧
=∂
∂
×=
∑
∑ ⎟⎟⎠
⎞⎜⎜⎝
⎛=
i
n
imi
PCSAFf
n = 1 not effec9ve in predic9ng synergies, especially for low load magnitudes n > 1 synergies are predicted, but addi9onal constraints are necessary to avoid muscular overloads n ∞ synergies are maximized, and effort is minimized All the exponents n > 1 predict synergies, but fail at predic9ng antagonisms
Mint = moment equilibrium equations f = cost function
Assignments 1 & 2 were just the first taste of the multibody dynamics
problem…now let’s have the main course

10/2/14
8
Generation of the body motion
0),()()()()( 2 =+×+++ qqMeFqRqGqqCqqM MT
1. Excita9on 2. Ac9va9on 3. Force
4. Joint torques 5. Dynamics of the rigid body system
BODY MOTION
Joint moments due to muscle forces
Joint moments due to external forces (e.g. ground reac9on)
Mass matrix
Gravita9onal effects
Centrifugal and Coriolis effects
Different approaches are possible
Assignment 1

10/2/14
9
Forward dynamics
[ ] { }),()()()()( 21 qqMeFqRqGqqCqMq MT +×++= −
Looks like a very nasty equation to solve…and it is! But computers can help us with its solution!
Numerical modeling of the tendon and muscle mechanics

10/2/14
10
The modeling approach There are two possible numerical descrip9ons: a phenomenological one (Hill, 1886-‐1977), and a mechanicis9c one, based on physiology and the biochemistry of muscular contrac9on (Huxley, 1917-‐1963)
Simple mathema9cal expressions, based on measurable parameters
Differen9al equa9ons, with several parameters hard to quan9fy
Muscle model (Thelen, 2003)
CE = contractile element αM = pennation angle
The muscle force generated is a function of three factors: the activation value (a), the normalized length of the muscle unit, and the normalized velocity of the muscle unit.

10/2/14
11
Generalized Hill model
)()(
)()(
wucwukFvcvkucukFFF
aaa
aappap
−+−=
+++=+=
Muscle model (Thelen, 2003) a) The rela>on between ac>ve force versus length can
be described as a Gaussian. The rela>on between passive force and length has a first exponen>al phase, followed by a second linear phase
b) scarico.
b) The rela>on between ac>ve force and velocity can be scaled in order to reduce the contrac>on velocity in sub-‐tetanic condi>ons
c) The force-‐strain rela>on for the tendon has a first exponen>al phase, followed by a linear phase

10/2/14
12
Muscle activation dynamics
Where τa(a,u) is a 9me factor which varies with the ac9va9on level, a is the muscle ac9va9on, and u è is the excita9on signal (Thelen, 2003). A more refined model could include different τ for rise and fall
;),( uaau
dtda
aτ−
=
( ) ( )auuaudtda
fallrise
−+−⎟⎟⎠
⎞⎜⎜⎝
⎛=
ττ11 2
Active muscle force
Where:
• fl è is a scale factor • LM is the normalized muscle
length • γ is a shape factor
γ2)1( −−
=ML
l ef

10/2/14
13
Passive muscle force
⎪⎩
⎪⎨
⎧
≥+−
≤−−=
∗
Ttoe
TTtoe
Ttoe
Tlin
Ttoe
Tk
k
TtoeT
Fk
eeF
FT
toe
Ttoe
toe
εεεε
εεεε
;)(
);1(1
Where: 1. is the tendon force
normalized by the max isometric force
2. is the tendon deforma>on 3. is the limit elonga>on over
which it behaves linearly 4. ktoe is a shape factor 5. klin is a scale factor. 6. is the limit
normalized force over which the tendon behaves linearly
( )33.0=TtoeF
TF
TεT
toeε
Ttoeε
Muscle force Vs. velocity
is the max contrac>on velocity, and b is calculated differently whether the muscle fiber is shortening (FM<afl) or lengthening (FM> afl)
bafFVaV l
MMM −
+= max)75.025.0(
⎪⎪⎩
⎪⎪⎨
⎧
≥−
−−
≤+
=
lM
Mlen
MMlenlf
lM
f
Ml
afFF
FFafA
afFAFaf
b;
)1())(/22(
;
is the max normalized muscle force when the fiber is elongated af is a shape factor
MlenF
MVmax

10/2/14
14
So, let’s get back to our forward dynamics problem…
Forward dynamics
Now we have all the theoretical background to start playing with our multibody dynamics software…

10/2/14
15
Open-‐source sohware for the mul9body
simula9on of the neuromuscular system and the mo9on dynamics simula9on
(numerical methods for the coupled solu9on of the mul9body
dynamic problem and the op9mal distribu9on of the muscle forces)
Website: https://simtk.org/home/opensim
There you can download and install the software for, and find a lot of tutorials and instructions
SimTK and SimBios are trademarks of Stanford University
The GUI

10/2/14
16
Our test case: simulation and prevention of ankle sprain
Research questions of our test case
You will examine and address how the following factors may affect angle inversion sprain injury: • Muscle reflexes
• Muscle co-activation
• Introduction of a passive orthosis

10/2/14
17
When & Where
Monday, October 6th , 10-12 (group 1) and 15-17 (group 2). Room INA 3,4 in the M:house