MSc Thesis
59
Game theory models: Solutions and dynamics. Steven Hamblin
description
The talk for my MSc thesis defence in 2007.
Transcript of MSc Thesis

Game theory models:Solutions and dynamics.
Steven Hamblin

Dynamics
Game
Complexity
Technique
and results

Using game theory...

Frequency dependence:

Frequency dependence: Optimization...
Game theory....

Frequency dependence: Optimization...
Game theory....
... fitness.

Evolutionarily Stable Strategy (ESS)
n John Maynard Smith (1973).
n “No regrets” - a strategy which, if the entire population adopts it, no individual can beat by switching to another.

Animal communication models




1
22
1 1 1 1
2 2 2 2 2 2 2 2

I. Game complexity.
Dynamics
Game
Complexity
Technique
and results

Problems:
n Size of the strategy space.
n Pervasiveness.

Strategy space...

1
22
1 1 1 1
2 2 2 2 2 2 2 2

1
22
1 1 1 1
2 2 2 22 2 2 2
Supported path
Unreached branches

II. Game dynamics.
Dynamics
Game
Complexity
Technique
and results

Population equilibria..
n Will a population go to an ESS from a non-equilibrium starting point?
n What happens if there are multiple solutions to the model?

Replicator dynamics...

Models too
simple
Model dynamics
are important.

Models too simple
Model dynamics
are important.
Make realistic models
Solve them analytically.

Models too simple
Model dynamics
are important.
Make realistic models
Solve them analytically.
ESS conditions
Strategy space
RD requires simple models.

Models too simple
Model dynamics
are important.
Make realistic models
Solve them analytically.
ESS conditions
Strategy space
RD requires simple models.

Models too simple
Model dynamics
are important.
Make realistic models
Solve them analytically.
ESS conditions
Strategy space
RD requires simple models.
Genetic algorithms!

Genetic Algorithmsn Algorithms that
simulate evolution to solve optimization problems.
n GAs are a search method, not a faithful replication of natural selection.

III. Results.
Dynamics
Game
Complexity
Technique
and results

Two models...
n E85 - a model of conventional signalling.
n SPS - a simpler model of handicapped signalling.

1 1 1 1
2 2
2 2
2 2
2 2
Strong
Strong Weak
"S" "W"
Signal
Strong
Signal
Weak
Weak
Strong Weak
"S""W""S" "W"
1 1
2 2 2
Signal
Strong
Signal
Weak
Full Attack Pause-Attack Flee
Full AttackPause-Attack
Flee
= ESS 1
(Enquist, 1985)

1 1 1 1
2 2
2 2
2 2
2 2
Strong
Strong Weak
"S" "W"
Signal
Strong
Signal
Weak
Weak
Strong Weak
"S""W""S" "W"
1 1
2 2 2
Signal
Strong
Signal
Weak
Full Attack Pause-Attack Flee
Full Attack Pause-Attack Flee
(4,-6) (5,-6) (10,0)
A,P,FA,P,FA,P,FA, P, F"S"/
"W"
"S"/
"W"
Opp
Signals
"W"
Opp
Signals
"W"
Opp
Signals
"S"
Opp
Signals
"S"
If Weak,
signal
If Strong,
signal:
WeakStrongWeakStrongEgo State:
Strategy chromosome:
ESS is "S"/"W"/A/F/P/A

Graph shows strategy evolution over time.





Previously unknown ES Set solution

Previously unknown ES Set solution
ESS disappears very rapidly.

IV. Conclusions.

Models too simple
Model dynamics
are important.
Make realistic models
Solve them analytically.
ESS conditions
Strategy space
RD requires simple models.
Genetic algorithms!
Results

Fin
Thanks to the Hurd Lab (and especially Pete)for the support over these past two years.

Genetic algorithm outcomes
MutationRate
Seed
0.001 0.002 0.003 0.004 0.005 0.006 0.007
05
1015
2025
3035
4045
5055
6065
7075
8085
9095
100
E ES O E ES O E ES O E ES O E ES O E ES O E ES O

{1,0}{1,0}{1,0}{1,0}{1,0}{1,0}
Donor strategy:
Another borderline example is the Johnstone & Grafen(1993) version of the Sir Philip Sidney game (Fig. 8). Thisgame models two different types of signaller (differing inrelatedness to the receiver), which are then assigned totwo levels of thirst. This arrangement decomposes toa four-state (type ! thirst level) action–response game.The receiver receives no information other than the sig-nal, so each of the types then collapses into an average ex-pected type according to the signal chosen (MaynardSmith 1994). This game then simplifies into a single-stateaction–response game. In other words, these two models,the Sir Philip Sidney game and the action–response game,are really the same thing.
Mutual Signalling Games and Signal Type
The averaging out of opponent types through signalpooling will occur whenever players cannot modifybehavioural choices with later moves. The single-state
and dual-state action–response games each allow only onemove per player. The stateless signalling and conventionalsignalling games comprise a signalling phase and a re-sponse phase. The response phase allows players tomodify their initial choice, the signal choice, given sub-sequently gained information. Players may choose behav-iours that will either maximize benefit in best cases, orminimize costs in worse cases. This fine-tuning providesa mechanism for types that were pooled earlier in thegame to be subsequently separated. This level of complex-ity allows for conventional signalling between playerswith conflicting interests (Hurd & Enquist 1998).
Stateless Mutual Signalling Gamesand Handicaps
Stateless signalling games (Fig. 7) begin with an initialmixed ESS signalling move. With no underlying state,the signalling move must be a choice made between
1
1 1
2 2
m0 m1
m0 m1 m0 m1
H D H D H D
H D H D H D H D H D H D H D
2 2
1 1
2 2
H D
H D
w1 P T N Co P T N Co P–H T–H N–H Co–H P–H T–H N–H Co–H
w2 P N T Co P–H N–H T–H Co– H P N T Co P–H N–H T–H Co–H
Figure 7. Kim’s (1995) stateless signalling game. Payoffs for the Hawk–Dove (H–D) subgames have been replaced by the generic variables T, Co,N, P (temptation, coordination, neutral and punishment); the results are identical to the traditional Hawk–Dove payoffs (with V and C ). A signal-ling ESS exists when T O Co R N O P. Generic payoffs for Hawk–Dove players are equivalent to: T Z V, Co Z V/C, N Z 0, P Z (V ! C )/2(where the generic payoffs are on the left, and classical Hawk–Dove payoffs are on the right). H is the handicap cost of using signalm1. The signalsin this game are effectively simultaneous. The second player chooses the signal to be used before learning of the first player’s choice of signal.
N
N N
S S
RR
type 1 type 2(q) (1 − q)
T T T T
(P) (1 − P) (P) (1 − P)
s sns ns s sns ns
g gng ng g gng ng g gng ng g gng ng
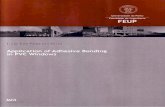
Figure 8. The ‘Sir Philip Sidney’ game as modelled by Johnstone & Grafen (1993). A signaller (S, the beneficiary) is of one of two types, eitherclosely related (type 1), or less closely related (type 2), chosen in a move by nature (N). These signallers are either thirsty (T ) or not (T!), andsignal (s) or do not (ns). The receiver (R, the donor) then either gives ( g) the resource to the beneficiary, or does not (ng). The receiver has noway of ever learning whether the signaller is of type 1 or type 2, so the distinction between them can be ignored and all signallers treated asone weighted average type. This reduces the game to a basic action–response game.
HURD & ENQUIST: TAXONOMY OF BIOLOGICAL COMMUNICATION 1165
Beneficiary strategy:

Class of Beneficiary:
1 2
Thirsty
Not
1 2 1 2
1 2
Thirsty
Not
1 2 1 2
SignallingStrategies
DonationStrategies
Donor: Give when signal.
B1: Signal when thirsty.
B2: Always signal.
Donor: Give when no signal.
B1: Signal when not thirsty.
B2: Never signal.
Donor: Always give.
B1: Never signal.
B2: Never signal.
Beneficiary(no signal)
Beneficiary(signal)
Donor Donor gives resource.

Model features...
n Sequential / multiple signals.
n Strength states.
n Asymmetries:
n Role asymmetries.
n Uncorrelated asymmetries.

Sir Philip Sydney
n Maynard Smith (1991)
n Johnstone & Grafen (1993)

B
D
Thirsty
Give
Not Thirsty
Don't
B B
D
Give Don'tD
Give Don't
D
Give Don't
Signal No Signal Signal No Signal
Don't 1,SB1,0
SD,1SD,1Give
Not Thirsty
Thirsty
0 � SD, SB � 1

B
D
Thirsty
Give
Not Thirsty
Don't
B B
D
Give Don'tD
Give Don't
D
Give Don't
Signal No Signal Signal No Signal
Don't 1,SB1,0
SD,1SD,1Give
Not Thirsty
Thirsty
0 � SD, SB � 1
Donor and beneficiary are related, and signalling is costly (reduces payoff).

Johnstone and Grafen (1993)
2 2 2 2
1
1
1
1
1
1
1
1
Closely related
Thirsty Not Thirsty
SignalNo Signal
SignalNo Signal
Distantly related
Thirsty Not Thirsty
SignalNo Signal
SignalNo Signal
Give Don't
= ESS 1
Give Don't Give Don'tGive Don't
Give Don'tGive Don't
Give Don'tGive Don't

Johnstone and Grafen (1993)
Beneficiary
2 2 2 2
1
1
1
1
1
1
1
1
Closely related
Thirsty Not Thirsty
SignalNo Signal
SignalNo Signal
Distantly related
Thirsty Not Thirsty
SignalNo Signal
SignalNo Signal
Give Don't
= ESS 1
Give Don't Give Don'tGive Don't
Give Don'tGive Don't
Give Don'tGive Don't

Johnstone and Grafen (1993)
Donor
2 2 2 2
1
1
1
1
1
1
1
1
Closely related
Thirsty Not Thirsty
SignalNo Signal
SignalNo Signal
Distantly related
Thirsty Not Thirsty
SignalNo Signal
SignalNo Signal
Give Don't
= ESS 1
Give Don't Give Don'tGive Don't
Give Don'tGive Don't
Give Don'tGive Don't

Johnstone and Grafen (1993)
2 2 2 2
1
1
1
1
1
1
1
1
Closely related
Thirsty Not Thirsty
SignalNo Signal
SignalNo Signal
Distantly related
Thirsty Not Thirsty
SignalNo Signal
SignalNo Signal
Give Don't
= ESS 1
Give Don't Give Don'tGive Don't
Give Don'tGive Don't
Give Don'tGive Don't
ESS: Donors give if a signal is received.Closely related beneficiaries signal if thirsty.Distantly related beneficiaries always signal.

0 100 200 300 400 500
0.0
0.2
0.4
0.6
0.8
1.0
Donor strategies over time
Generation
Prop
ortio
n of
tota
l stra
tegi
es
Always giveGive when signalGive when no signalNever give

0 100 200 300 400 500
0.0
0.2
0.4
0.6
0.8
1.0
Class 1 Beneficiary strategies
Generation
Prop
ortio
n of
tota
l stra
tegi
es
Always signalSignal when thirstySignal when not thirstyNever signal

0 100 200 300 400 500
0.0
0.2
0.4
0.6
0.8
1.0
Class 2 Beneficiary strategies
Generation
Prop
ortio
n of
tota
l stra
tegi
es
Always signalSignal when thirstySignal when not thirstyNever signal

V = resource value.C = cost of fighting.

1
2 2
(V-C) / 2
(V-C) / 2
V
0
0
V
V/2
V/2
Hawk
Hawk Hawk
Dove
DoveDove
Player 1 payoffs
Player 2 payoffs
V = resource value.C = cost of fighting.