Motion profile planning of repetitive point-to-point control for maximum energy conversion...
15
Pergamon Mechatronics Vol. 6, No. 6, pp. 649-663, 1996 Copyright © 1996 Elsevier Science Ltd. All rights reserved. Printed in Great Britain. 0957-4158/96$15.00+0.00 PII:S0957-4158 (96) 00012-8 MOTION PROFILE PLANNING OF REPETITIVE POINT-TO-POINT CONTROL FOR MAXIMUM ENERGY CONVERSION EFFICIENCY UNDER ACCELERATION CONDITIONS J. S. PARK Agency for Defense Development, Laboratory of Actuation Systems, 4-2-5, P.O. Box 35-4, Taejon 305-600, South Korea (Received 22 June 1995; revised 17 January 1996; accepted 30 January 1996) Abstract--The motion profile for point-to-point control under acceleration, which is applied to many applications in electro-mechanical systems, should be planned so as to maximize the energy conversion efficiency. Initially, a theoret- ically ideal profile was derived by adopting Pontryagin's minimum principle. The performance of this energy efficient motion profile is compared to those of three conventional profiles widely used in practice: trapezoidal, variable-rate tran- symmetric, and exponential. Finally, a selection guide for motion profile is presented for applications in which energy conversion efficiency and peak acceleration become critical, such as the material handling machine, copying machine, various dedicated purpose machines, electric motor cars, and space vehicles. Copyright © 1996 Elsevier Science Ltd. el, C2 Ei Em H ia J kl, k2 Kb Kt K~ KS Ra t ta tc Tt /) Wd, Wdl ol(t) NOMENCLATURE constants electrical input energy transferred to the system mechanical work energy Hamiltonian function armature current of motor system inertia constants back e.m.f, constant of motor torque constant of motor peak acceleration coefficient input energy coefficient armature resistance of motor time acceleration time cycle time of a duty cycle reflected external torque voltage heat dissipated energy acceleration of motor 649
Transcript of Motion profile planning of repetitive point-to-point control for maximum energy conversion...

Pergamon
Mechatronics Vol. 6, No. 6, pp. 649-663, 1996 Copyright © 1996 Elsevier Science Ltd. All rights reserved.
Printed in Great Britain. 0957-4158/96 $15.00+0.00
PII:S0957-4158 (96) 00012-8
MOTION PROFILE PLANNING OF REPETITIVE POINT-TO-POINT CONTROL FOR MAXIMUM ENERGY CONVERSION EFFICIENCY UNDER
ACCELERATION CONDITIONS
J. S. PARK Agency for Defense Development, Laboratory of Actuation Systems, 4-2-5, P.O. Box
35-4, Taejon 305-600, South Korea
(Received 22 June 1995; revised 17 January 1996; accepted 30 January 1996)
Abstract--The motion profile for point-to-point control under acceleration, which is applied to many applications in electro-mechanical systems, should be planned so as to maximize the energy conversion efficiency. Initially, a theoret- ically ideal profile was derived by adopting Pontryagin's minimum principle. The performance of this energy efficient motion profile is compared to those of three conventional profiles widely used in practice: trapezoidal, variable-rate tran- symmetric, and exponential. Finally, a selection guide for motion profile is presented for applications in which energy conversion efficiency and peak acceleration become critical, such as the material handling machine, copying machine, various dedicated purpose machines, electric motor cars, and space vehicles. Copyright © 1996 Elsevier Science Ltd.
e l , C2
E i Em H ia J kl, k2 Kb K t K~ KS Ra t
ta
tc
Tt /)
Wd, Wdl ol(t)
NOMENCLATURE
constants electrical input energy transferred to the system mechanical work energy Hamiltonian function armature current of motor system inertia constants back e.m.f, constant of motor torque constant of motor peak acceleration coefficient input energy coefficient armature resistance of motor time acceleration time cycle time of a duty cycle reflected external torque voltage heat dissipated energy acceleration of motor
649

650 J.S. PARK
O:p /t
~1, K
tom
~Omax o(0 Om re
peak acceleration of motor time fraction of acceleration time energy conversion efficiency costate variables Kt/Kb, ratio of torque constant to back e.m.f, constant velocity of motor allowed velocity of motor maximum velocity of motor displacement of motor total travel distance of motor (rotational or linear) during a duty cycle time constant of exponential profile
I. INTRODUCTION
A great variety of electro-mechanical servos found in various automated machinery may be represented by an elementary form as shown in Fig. 1. A D.C. servo motor (or A.C. synchronous servo motor) is used as the main actuator and the load often needs to be driven repetitively to reciprocate between two specified positions in rotary or translatory motion. In general, this case is referred to as repetitive PTP (point-to-point) control. For this mode of control, the various forms of motion profile may be used for the actual load motion in industry with acceptable performances. Emphasis is placed upon achieving smooth motion, stability considering low accelera- tion, jerk-free motion, and low vibration [1-6]. However, the selection of a suitable profile for a specific application is challenging since it affects the overall servo performances.
In addition, several profiles have been proposed and popularly used in practice: trapezoidal, variable-rate transymmetric, exponential, polynomial, and sine or cosine
[_~.ectric~(, [ e c t r o n i c ,'lechf, r';C; (cr '9onent~ con t ,~o / c o m p o n e n t s
i Pos; t lon/ 'VeWciD I F ....... ] - J ~ . . . . . . ( Transducer ~ - - --~,~ ~'JT'~_
Motion controUer
I Po~er QmPlifier
I mechanism :
[ Speed red~c~;on i [ mechanism I
i - - J ~ - - - ( ' ~ e r v o 'i r L MOtOr/
I La&d I I j ' ~ ~ k - - ' - - - '~
. . . . . . ~ "\\ _ ~ - - - - z ~
;peeO ,'eduction `ge¢r ~c, ll scre'~
7
Tr&ns i&tor ' / se rvo drh, e system
I [ Load ] L~ ! . ~
~peed reouction .gear"
Servo motor
Ro ta ry se rvo dr ive system
Fig. 1. Representative configuration of PTP motion drive system.

Motion profile planning of point-to-point control 651
forms. These profiles, however, turn out not to be optimum when the energy conversion efficiency of the motor is considered; a considerable amount of electrical input energy becomes wasted in the form of heat dissipated energy from the motor coil. As a result, there is an increase in the input energy required to drive the load between two specified positions, and an equivalent increase in the operating cost. For this reason, many efforts to improve the energy efficiency have been reported in the literature because the effect of minimizing electrical losses on the system performance is extremely important [7-9]. However, the major portions of these studies were mainly focused on finding the control law, and the application problem of minimiza- tion of input energy to PTP motion profile planning under acceleration was not investigated.
The objective of the present paper is to investigate how the input energy transferred to the PTP motion system is affected by the motion profile and to determine an energy-efficient motion profile under acceleration, and then to present the design scheme of profile planning to enable the designer to adjust the value of peak acceleration and input energy of PTP motion. Initially, by adopting Pontryagin's minimum principle, a theoretically ideal profile is derived so as to maximize the energy conversion efficiency of a motor. The performance of this energy efficient profile is then compared to those of the three conventional profiles which are widely used in practice: trapezoidal, variable-rate transymmetric, and exponential. Finally, a selection guide for motion profiles is presented for applications in which energy conversion efficiency and peak acceleration become critical.
2. INPUT ENERGY TRANSFERRED TO THE PTP MOTION SYSTEM
The whole servo may be considered thermodynamically as an energy converter as illustrated in Fig. 2. It takes electrical input energy from control and then outputs the mechanical work to drive the load. This simplified circuit well represents a D.C. permanent magnetic servo motor (including an A.C. synchronous servo motor). Considering the motor as an energy converter, its energy conversion efficiency may be defined as
Em 0 - E, (1)
in which Ei and Em denote the electrical input energy and the mechanical work to
V Electrical input energy
V o l t ~ - ~ ~ p e e d
( V -- Ra(T/Kt) + Kbt° /
C u r r e ~ (J~ + T/~Torque
~o
Mechanical work energy
T
Fig. 2. Converting electric input energy to mechanical work with operational equations by a servo motor.

652 J.S. PARK
drive the load, respectively. Effects of the motion profile on the efficiency may be analyzed in detail by using the equivalent circuit of Fig. 2. The electrical input energy transferred to the system, E~, is given by
-&
Ei = J~} v, "ia d t , (2)
where v is the voltage applied to the motor and i, is the current of the armature coil (or stator coil of an A.C. synchronous servo motor). Using the equivalent circuit of the D.C. permanent magnetic servo motor with its relevant electrical parameters as shown in Fig. 1 (for most servo systems practically designed, the viscous damping force becomes negligible as the viscous damping coefficient f is found to be small), E~ can be determined as
Jj 'R ai K '~ E, : + + To,oat (3) Kt h)
o r
Ei = Wd + Era. (4)
The first term of Eqn (3) represents the heat dissipated energy, Wd, while the second term is the mechanical work, E m, which may be described in further detail as
K~ UIt c0
Any motion profile to be used for repetitive PTP control should satisfy the following boundary conditions of load motion within a duty cycle:
M
0(0) = 0, J0° ) ( t )dg = 0 m {6) ~o(0) = O, (o( tc) = O.
Noting that K f f K b = x (to= 1 for D.C. servo motor and trapezoidal type A.C. brushless servo motor, x = 3/2 for sinusoidal type A.C. brushless servo motor) and substituting the initial and end conditions of Eqn (6) into Eqn (5), E m is finally determined as
E m -- ( 1 / K ) ( ½ J ( ~ - ( t c ) - ¢o2(0)) + T , ( O ( t c ) - 0(0)))
TIOm - (7)
K
This means that once the boundary conditions are specified in repetitive PTP control, the mechanical work Em is simply determined by the reflected load torque T~ and the total travel distance of the motor 0m, remaining constant regardless of the motion profile to be taken. Combining Eqns (1) and (4) with Eqn (7), the energy conversion efficiency q can be rewritten as
r, Omi : , ( 8 )
( Tj Om//(" ) + W d
in which the heat dissipated energy Wj is expressed as

Motion profile planning of point-to-point control 653
/-t¢ 2
Wd = )0 (Raia) dt. (9)
Therefore, it can be shown that the energy conversion efficiency for the repetitive PTP motion increases if the heat dissipated energy Wd of Eqn (9) is minimized. Consequently, there is an equivalent decrease in the input energy, which should be transferred to the system to drive the load, since the mechanical work Em is only determined by the boundary conditions of PTP motion and remains constant.
3. ENERGY EFFICIENT MOTION PROFILE FOR MINIMUM INPUT ENERGY
3.1. Energy efficient motion profile
For a given value of boundary conditions of motion within a duty cycle, the state equation of motion can be obtained as
0 = w (10)
Kt . rz (J) = - - I a - - --. (11)
J J
The problem of optimizing the motion profile to minimize the heat dissipated energy can be formulated as
Determine the profile of
in order to minimize
subject to
o (t)
f0 tc .2 (Rat a) dt
o,(o) = o
= o
f/ t)dt =Ore.
This problem can readily be treated by adopting the well-known Pontryagin minimum principle [10]. The Hamiltonian function, H, is defined with two costate variables ~Pl(t), ~P2(t) and the state equation of Eqns (10) and (11) as
H(~, ~, ia, t) = Rai~ + ~01o) + 42 ~ - . (12)
Then, necessary conditions for optimality can be evaluated by the corresponding equations as

654 J.S. PARK
where k 1 = 2 and k2 should be altered to
d~Pl 3H
d t 3 0
dv22 3H
dt 30)
dH - - 0 .
dia
(13)
o(o) o, o(t,) = ' = ~[0m -- 0)m(/c -- 2 t a ) ] ( 2 0 )
~ 0 ) = 0, 0 ) 0 , ) = 0).,.
The Hamiltonian function is derived in a similar way to Eqn (12). Using the boundary
In addition to the above necessary conditions, the sufficient condition for the global minimum is obtained by the following equation, that should be positive definite:
92H D - > 0. (14)
3i2a
The sufficient condition of Eqn (14) is always satisfied: 3~H/3 i~ turns out to be Ra, which is a positive constant. The optimum velocity can therefore be obtained from the necessary conditions of Eqn (13), and then produces the following first-order differential equation in terms of 0)(t):
(o(t) - ( - c ~ t + c2), (15) 2 R J 2
in which cl and c2 are constants. The solution of Eqn (15) can be explicitly obtained together with the boundary conditions of Eqn (6) as
60rn 40)max 0)(t) = - - " t ( tc -- t ) or 0)(t) -- t ( t c -- t ) . (16)
3 2 tc tc
The profile turns out to be symmetric with its maxima always at the middle of the duty cycle and the maximum speed O3ma x is obtained as
3 0m ~Om,x = - " - - (17)
2 t c
It is often the case that, due to practical reasons, motor speed needs to be restricted to be less than a certain value of 0)m. This constraint may be specified in the form of an equality equation as
0)m ~'~ (/)max' ( 18 )
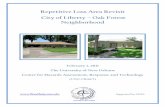
When this constraint is added, the velocity profile is substituted by its symmetric parts due to the symmetricity of the profile, as shown in Fig. 3. Hence, the new value of the objective function becomes
Wda = k l RaiZadt + k2, (19)
= ( R a r ~ / K ~ ) ( t c - 2G). In addition, the boundary conditions

Motion profile planning of point-to-point control 655
m01ot speed
~IModitiedl velocity profile Optimal velocity profile
¢4n t-tc)~
ta kl(=tc-to t¢ " time (se~)
Fig. 3. Modified parabolic velocity profile with speed constraint.
conditions of Eqn (20), the solution of the equation is of the following form (a detailed derivation is described in the Appendix):
and
to(t) =
tOm ,-S-" t(2ta - t) ta
tOm
tOm. (t -- t c + 2ta)(tc -- t) --5- ta
( 0 ~< t <~ ta)
( t a ~< t ~< t c - ta )
( t o - ta <~ t ~< to)
(21)
tO m t c As illustrated in Fig. 3, the modified optimum profile of Eqn (21) is represented by the thick solid line which is determined by the envelope line of the two parabolic velocity profiles.
3.2, Peak acceleration and minimum input energy
It is readily shown that the peak acceleration can be written from the modified parabolic velocity profile of Eqn (21) as
20) m c~p - (23)
ta

656 J.S. PARK
Substituting Eqn (22) into Eqn (23), the peak acceleration is given by the boundary conditions as
~Orn Crp = K.- , (24) 4 0m)
(o m t c
where the constant K , is obtained as 4/3. In addition, the heat dissipated energy
Eqn (21) into Eqn (9) as 16 RaJ2mm RaT~tc
Wd = - - " + - - (25) 9 ( 0 m ) K~
K~tc 1 - - O)m t c
Accordingly, it is shown that the input energy E~ required to drive the load can be obtained from Eqns (4) and (25) and uniquely determined by the boundary conditions and inherent parameters of the motor as
RaJ20) 2 RaTer c TlOm Ei = Kt~ + - - + - - , (26)
g~ tc (1 - --Om ) K~ K
(Om i c
in which the constant K s is obtained as 16/9.
W~ can be determined by substituting
4. PERFORMANCES OF CONVENTIONAL MOTION PROFILES
4.1. Variable-rate t ransymmetr ic mot ion profi les
Referring to Fig. 4, showing the variable-rate transymmetric motion profile which is often used to avoid jerky motion due to discontinuity of acceleration, there are distinct segments composed of constant velocity and linearly varying acceleration of which each of the path segments should be split into three regions. The first segment consists of a linear rise in acceleration from zero to c~ in a time, f l t a , followed by a constant acceleration from flt~ to (1 - /~ ) t a , and so forth. The velocity and displace- ment profiles corresponding to the acceleration profile are described as
1 t O ~ t < f i t a
a ( t ) = flta ~ t < (1 - f l ) t a (27a)
[Q( t a - t) (1 - f l ) t a <~ t <~ t~
re(t) =
cat2 0 <<- t < fit a 2
1 + 2 ~ - - ( 1 - - 2 f l + 2 / ~ 2 ) |
] l a
f i t a ~ t < (1 - f l ) t a (27b)
( 1 - - / ~ ) / a ~ l ~ t a

Motion profile planning of point-to-point control 657
Acce[eratlon, ti (t) /
2 tip ~ .~. ~=~/2
.'" " I , / a ....... A, • - _ - ~
i"\ r" I I , /
J - - Acceleration zone - -J- - - Constant -J ~-. / J
Veloclty,~ (t)
tdrl . I . . ' B I . . .
i . / . / " ~ ' - ~=~/2
.- 'L i ' " " ~ i ~ e
Fig. 4. Acceleration and velocity profiles of variable-rate transymmetric motion.
O(t) =
cl --=t 3 0 <~ t < fit a 6
Cl 3 t 2 t
c l t 3 a [ - ( t l 3 + 3 ( t / 2 - 3 ( 1 - 2fl + 2fl2) t 6 [ \ t a ] \ t a ] t a
+ (1 - 3fl + 3fl2)1 l
t i tan< t < ( 1 - - f l ) t a
(1 - fl) ta ~ t <- ta,
(27c)
C l - -
f i t a '
where t a and fl denote acceleration time and time fraction of acceleration time, respectively. The value of the peak acceleration and the total travel distance during a duty cycle can be found by using the following conditions:

658 J.S. PARK
O)(ta) = O)m (28)
and
0m = 20(ta) + ~Om(t c -- 2ta). (29)
Substituting Eqn (28) into Eqn (27b) and Eqn (27c) into Eqn (29), and solving for oL and 0m, gives
CO m a~p - (30)
( 1 - /3)t~ and
0 m -- O~p(l -- /~)t~ n t- O)m(t c -- 2ta). (31)
In addition, substituting Eqn (30) into Eqn (31) and rearranging for ta and a~p leads to
ta- - tc(l - --Ore ) (32) (Ore lc
and
~m olp = . (33) ( 0m )
(1 - /3)t c 1 o)-~c
As shown in Fig. 4, there are various profiles that can be generated by varying the time fraction /3 of the linear acceleration. Depending on which profile is chosen, the levels of peak accelerations for a given total travel distance 0m and cycle time tc are different. Two ultimate cases of variable-rate transymmetric motion profile can be described as follows.
Case (i): /3 = 0 (constant acceleration, simple trapezoidal velocity profile). Using Eqn (33), the peak acceleration cry is expressed as
COm a'p = . (34)
Substituting the equivalent velocity profile of Eqn (27b) into Eqn (9) and combining with Eqn (4), the input energy E~ can be expressed as
2RaJ"Og~ RaT[t c TlOm Ei = + - - + - - (35)
K~tc(1 - --0'~ ) K~ Wm tc
Case (ii): /3 = 1/2 (triangular acceleration). Similar derivations were performed for case (ii). Then, the peak acceleration cvp and input energy Ei can be expressed as
20) m % = (36) O__m)
03 m t c

Motion profile planning of point-to-point control 659
and
2 2 8 RaJ O)m RaTEtc TlOm Ei = - " + - - + - - (37)
K~tc 1 - - - 09 m t c
In addition to the extreme cases above, the peak acceleration and input energy of each transymmetric profile somewhere between case (i) and case (ii) can be determined; the results are shown in Table 1. It can be shown that the peaks of acceleration and their corresponding input energy for the variable-rate transymmetric profiles are derived in the same form as Eqns (24) and (26), in which K~ becomes 1 initially and increases to 2 and K s becomes 2 initially and increases to 8/3 as fl approaches 1/2, as illustrated in Fig. 4.
4.2. E x p o n e n t i a l m o t i o n pro f i les
Referring to Fig. 5a showing the exponential motion profile which is always applied to the motion profile for feedrate control of cutting tools in a machine tool servo system [4], there are distinct segments composed of the following:
~ m • e-t/re 0 <~ t < t a r¢
c~(t) = 0 t a ~ t < t c -- t a (38a)
--O)m " e -[t-(tc-ta)]/re t c -- t a <~ t < t c re
Table 1. Comparison of electrical input energy and values of peak acceleration for various motion profiles
Characteristics Peak acceleration, Otp Input energy, Ei
of motion profile tom RaJ-2~2m RaT2t¢ TlOrn O{p = K~. Ei = K# + - - + - -
tom tc 09m tc
Motion profiles K~ K#
Modified parabolic 4/3 16/9
Variable-rate transymmetric fl=O 1 2 fl = 1/4 4/3 64/27 fl = 1/3 3/2 5/2 /8 = 3/8 8/5 64/25
r = 1/2 2 8/3
Exponential type 1 6 6 Exponential type 2 2 2

660 J.S. PARK
Acceleeat~on, a ( t )
Te
t a
Velocity, ~(t)
(a)
Acceleration to- tytc
l I Bec ~(erg t~on
l E ~- t~ to- to tc
Acceteratlon,aCt)
• e k l
t a
V e l o c l t , , ~(t)
t a
(b)
t c - t Q tc
Fig. 5. Acceleration and velocity profiles of (a) exponential profile type 1 and (b) exponential profile type 2.
t o ( t ) =
~ O m ' ( l -- e - ' ~ ' ) 0 ~ < t < t . ~o., ta ~ t < t c -- ta fore" e--[t {t,--t~)]/r,, I c - - ta <~ t < tc
(38b)
where
[a 1/e - -
6
From Eqns (38a), the peak acceleration c~p is described as
(39)
'Ore (40) O~p - -
Te
and the acceleration time ta is determined from the boundary condition of Eqn (6) as
t~ = 4( 1 _ __0R ). (41) tO m t c
Substituting Eqns (39) and (41) into Eqn (40) gives
Ogp ~- OtDm . (42)
(Orn t c ]
The input energy Ei can be obtained by substituting Eqn (38b) into Eqn (9) and combining with Eqn (4) as

Motion profile planning of point-to-point control 661
6 RaJ2 to2m Ra T2 tc TlOm Ei = + ~ + - - (43)
K2tc(l - O___~_m ) K~ r tom t c
A similar derivation was performed on another exponential profile type as shown in Fig. 5b; there are distinct segments composed of the following:
O:( t) =
co(t) =
tom • e-t/to 0 ~ t < t a
re 0 t a <~ t < tc - - ta
- - t O m ' e (t-tO/re t c - - t a <~ t < t c
re
to m • (1 - e -t/z°) 0 <<- t < t a tom ta ~< t < tc -- ta tom" [1 - e (t-re)Ire] tc - - ta ~ t < tc
where
(44a)
(44b)
t a r e -
6
Then, the peak acceleration % and input energy Ei can be described as
2to m % =
t+_ 0m 1 tom tc
and
(45)
2RaJEto2m RaT~t c Z l O m Ei = + - - + - - (46)
K~tc(l - 0111) K~ X
tO m t c It can be shown that the values of peak acceleration and input energy of each exponential profile are expressed in the same form as Eqns (24) and (26) and there is a relative advantage of exponential profile of type 2 over type 1 profile, as illustrated in Fig. 5a and b, since the peak acceleration and input energy of type 2 profile are lower than those of type 1 profile.
5. DISCUSSION
The energy saving effect of the modified parabolic velocity profile is verified by comparing it with other motion profiles; one is the variable-rate transymmetric motion profile for linearly varying acceleration and the other is the exponential motion profile. If the variable-rate transymmetric motion profiles are considered, their input energy coefficient K~ becomes 2 initially and increases to 8/3 as j6

662 J.S. PARK
approaches 1/2, as summarized in Table 1, which shows a comparison of the input energy and the values of peak acceleration for the various types of motion profiles. Similarly, if the exponential motion profiles are taken, Ke becomes 6 and 2 as shown in Fig. 5a and b, respectively.
It is therefore a fact that the input energy of the more popular profiles is not only dissipated into heat energy excessively, but the value of peak acceleration is greater than that of the energy efficient motion profile. As an example, in comparison with the variable-rate transymmetric motion profile at fl = 0 time fraction, which is regarded as a simple trapezoidal velocity profile, it can be shown that the input energy of the modified parabolic velocity profile suggested can save 12.5% in each repetition of the PTP motion and, furthermore, saves 33% of input energy under the same peak acceleration, which is given at the fl = 1/4 time fraction. In addition, contrary to the exponential profiles illustrated in Fig. 5a and b, there is a decrease in both the input energy and peak acceleration.
6. CONCLUSIONS
As we have described in detail above, the results indicate that it would be effective to select the modified parabolic profile, for which the effect of energy savings can be seen to be superior to that of other commonly used profiles. As a result, there is not only a decrease in the electrical input energy required to drive the load, but an equivalent decrease in the operating cost. The conclusions can be summarized as follows.
(1) The modified parabolic profile is more energy efficient than the conventional profiles under the same acceleration conditions.
(2) A guide has been presented which will help the designer to adjust values of peak acceleration and input energy for applications where control of these is needed in the PTP motion system.
REFERENCES
1. Kramer S. N., Development of variable-rate transymmetric motion within dis- cretely vanishing shock. A S M E J. Mech. Transmiss., Automat. Des. 106, 109-113 (1984).
2. Kramer S. N. and Curran R. L., Development of the tri-level variable-rate trajectory with discretely vanishing shock for optimum design. A S M E J. Mech., Transmiss., Automat. Des. 110, 88-92 (1988).
3. Yoon K. and Rao S. S., Cam motion synthesis using cubic splines. A S M E J. Mech. Des. 115,441-446 (1993).
4. Allen-Bradley Co., Allen-Bradley IMC 120 motion control system, product data. U.S.A., March (1988).
5. Schmitt D., Soni A. H., Srinivasan V. ° and Naganathan G., Optimal motion programming of robot manipulators. A S M E J. Mech., Transmiss., Automat. Des. 107,239-243 (1985).

Motion profile planning of point-to-point control 663
6. Pu J., Weston R. H. and Moore P. R., Digital motion control and profile planning for pneumatic servos. A S M E J. Dynam. Syst., Meas., Control 114, 634-640 (1992).
7. Parviz F. and Wils L. C., Design of DC traction motor drives for high efficiency under accelerating conditions. IEEE Trans. Ind. Applic. 30, 1134-1138 (1994).
8. Cathey J. J., Reduction of dc traction motor armature copper losses through optimal control. Electr. Mach. Electromech.: Int. Quart. 269-283 (1979).
9. Shigeo M., Yi T., Yori T. and Takao H., Loss minimization control of permanent magnet synchronous motor drives. IEEE Trans. Ind. Elec. 41,511-517 (1994).
10. Pontryagin L. S. et al., The Mathematical Theory of Optimal Process. John Wiley, New York (1962).
A P P E N D I X
In this Appendix, a derivation of Eqn (21) is given in detail. Solution of the differential equation of Eqn (15) is obtained by using the boundary conditions of Eqn (20) in the form of
k 3 t + kat (0 <~ t ~ ta)
o)(t) = Wm (ta ~< t ~ tc - ta) ( A 1 )
k3[t - (to - 2ta)l 2 + k4[t - (to - 2t~)] (t~ - ta ~< t ~< tc),
where k3 and k4 become, respectively
3win[1 t~(1 0m )] (A2a) k3 = t 2 I ta\ -- wrnt---"-~
and
k4= 4 w i n [ l - 3 t ¢ ( 1 - Om )]. (A2b) ta l 4 t a \ O)mtc
In the above solution, ta denotes the time interval for acceleration, which can be decided so as to satisfy the following condition:
f0" 0m = 2 w(t) dt + Wm(t~ -- 2ta). (A3)
Substituting Eqn (A1) into Eqn (A3) gives
4 0m = -'Wmta + ~0m(tc -- 2ta) (A4a)
3 o r
wmto = 5" t-? Hence, the modified velocity profile of Eqn (A1) is rewritten by substituting Eqn (A4b) into Eqns (A2a) and (A2b) and rearranging as
[ - ~ " t ( 2 t a -- t ) (0 ~ t ~< ta) t; co(t) = COrn ( ta ~ t ~< tc - ta) .
• ( t -- tc + 2 t a ) ( t c -- t ) (to -- ta <~ t <~ to) [ ta