Motion Planning i n Virtual Environments
20
Spring 2007 Motion Planning in Virtual Environments Dan Halperin Yesha Sivan TA: Alon Shalita Basics of Motion Planning (D.H.)
description
Motion Planning i n Virtual Environments. Dan Halperin Yesha Sivan TA: Alon Shalita. Spring 2007. Basics of Motion Planning (D.H.). Motion planning: the basic problem. - PowerPoint PPT Presentation
Transcript of Motion Planning i n Virtual Environments

Spring 2007
Motion Planning in Virtual Environments
Dan Halperin Yesha Sivan
TA: Alon Shalita
Basics of Motion Planning (D.H.)

Motion planning:the basic problem
Let B be a system (the robot) with k degrees of freedom moving in a known environment cluttered with obstacles. Given free start and goal placements for B decide whether there is a collision free motion for B from start to goal and if so plan such a motion.

Configuration spaceof a robot system with k degrees of freedom
the space of parametric representation of all possible robot configurations
C-obstacles: the expanded obstacles the robot -> a point k dimensional space point in configuration space: free,
forbidden, semi-free path -> curve
[Lozano-Peréz ’79]

Point robot
www.seas.upenn.edu/~jwk/motionPlanning

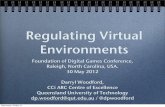
Trapezoidal decomposition
c11
c1
c2
c4
c3
c6
c5c8
c7
c10
c9
c12
c13
c14
c15
www.seas.upenn.edu/~jwk/motionPlanning

Connectivity graph
c1 c10
c2
c3
c4 c5
c6
c7
c8
c9
c11
c12
c13
c14
c15
c11
c1
c2
c4
c3
c6
c5c8
c7
c10
c9
c12
c13
c14
c15
www.seas.upenn.edu/~jwk/motionPlanning

Two major planning frameworks
Cell decomposition Road map
Motion planning methods differ along additional parameters

Hardness The problem is hard when k is part of the
input [Reif 79], [Hopcroft et al. 84], … [Reif 79]: planning a free path for a robot
made of an arbitrary number of polyhedral bodies connected together at some joint vertices, among a finite set of polyhedral obstacles, between any two given configurations, is a PSPACE-hard problem
Translating rectangles, planar linkages

A complete solution
roadmap [Canny 87]:a singly exponential solution, nk(log n)dO(k^2) expected time

What’s behind the maze solver that we saw last week:
translational motion planning for a polygon among polygos using exact Minkowski sums

Given two sets A and B in the plane, their Minkowski sum, denoted A B, is:
A B = {a + b | a A, b B}
Planar Minkowski sums
=

We are given two polygons P and Q with m and n vertices respectively. If both polygons are convex, the complexity of their sum is m + n, and we can compute it in (m + n) time using a very simple procedure.
Convex-convex

If only one of the polygons is convex, the complexity of their sum is (mn).
If both polygons are non-convex, the complexity of their sum is (m2n2).
When at least one is non-convex

The prevailing method for computing the sum of two non-convex polygons: Decompose P and Q into convex sub- polygons, compute the pair-wise sums of the sub-polygons and obtain the union of these sums.
The decomposition method
P
QP1
P2
Q1
Q2P Q

The maze solver that we saw last week uses CGAL’s Minkowski sum package

What is the number of DoF’s?
a polygon robot translating in the plane
a polygon robot translating and rotating
a spherical robot moving in space a spatial robot translating and
rotating a snake robot in the plane with 3 links

How to cope with many degrees of freedom and more complicated robots?
prevalent methods: sampling-based planners
We start with the archetype: probabilistic roadmap (PRM)

Probabilistic roadmapsProbabilistic roadmapsfree space
qqbb
qqgg
milestone
[[Kavraki, Svetska, Latombe,OvermarsKavraki, Svetska, Latombe,Overmars, 95], 95]

Key issues
Collision checking Node sampling Finding nearby nodes Node connection

THE END