More Electric Aircraft
63
Transcript of More Electric Aircraft

Chapter 1
More Electric Aircraft
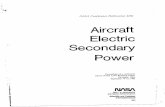
In the conventional aircraft architecture, the main part of the fuel is converted in
propulsive power (primary power) by the engine; the remaining part (secondary
power) is converted in mechanical, hydraulic, pneumatic and electrical form. The
secondary power is distributed around the engine and airframe to supply all the on-
board systems as for example (see Fig.1.1) landing gear, braking and �ight control
system, air conditioning, pressurization, de-icing and avionics, etc [1]. Therefore,
Figure 1.1. Schematic conventional aircraft power distribution systems [2].
6

1 � More Electric Aircraft
on the majority of the today's in-service aircraft of any size, either civil or military,
secondary power is distributed by complex power distribution nets aboard, with an
appropriate redundancy of all the systems for safety purpose. In order to reduce
this complexity, with the aim to improve e�ciency and reliability, the aircraft ma-
nufacturers trend is towards the More Electric Aircraft (MEA) concept that is the
wider adoption of electrical systems in preference to the others (see Fig.1.2).
In the next sections a brief historical perspective of the milestones that has contri-
buted to the MEA concept development and the description of the main aircraft
systems are presented.
Figure 1.2. Schematic More Electric Aircraft power distribution systems [2].
1.1 Historical perspective
Following the World War II both the speed and size of aircraft increased, leading
to requirements to make powerful �ight controls functions. Aircraft designers con-
ducted initial studies comparing hydraulic power and electrical power as the motive
force for a variety of functions aboard aircraft. Although some military aircraft
(for example the British `V' bombers, the Vulcan, Victor and Vickers Valiant) used
7

1 � More Electric Aircraft
electrical power for primary �ight controls and other functions, there was a gene-
ral world-wide progression towards others types of secondary power on-board [1].
In particular it was due to the insu�cient electrical power generation capability
and the volume necessity for the required power conditioning systems. These �rst
studies indicated that hydraulically-based secondary power would be the optimum
approach. This engineering approach is still adopted today employing hybrid me-
chanical and hydraulic power for the most actuation functions, pneumatic power for
air-conditioning/pressurisation, ice protection and electric for avionics and utility
functions. Sometimes, to provide motive force for on-board functions, `fueldraulic'
aircraft power system was also used.
While the performance in this complex hybrid non-propulsive power system has
improved over time, it still represents a major factor in aircraft maintenance down-
times and failures. Towards the end of 1970′s idea of the use of a single, electrical,
type of secondary power risen up. The United States Air Force and NASA started a
development and demonstration program calledMore Electric Aircraft, with the aim
to reduce or eliminate the need for centralized aircraft hydraulic, mechanical and
pneumatic power systems, replacing them with an electrically-based power system.
In this way, the concept of More/All Electric Aircraft risen up and have been object
of continuous studies and demonstrations of the technologies and equipment requi-
red over the past years. The increase of on-board power needs of modern, large and
complex civil aircrafts has extended the `more electric' concept to the energy saving
and e�ciency improvements. Furthermore, the resulting step change in aircraft
electrical loading, will have far reaching implications for the electrical generation
systems, realizing the so-called More Electric Engine (MEE). In the MEE concept,
the electrical machine is integrated inside the main gas turbine to generate electrical
power, start the engine and guarantee safety generation in case of a critical on-�ight
failure.
In the recent years numerous projects and initiatives are born, founded by European
Union, industries, public agencies and Ministries to explore the application of the
MEA and MEE concept both to military and civil applications.
In 2000 the MESA (Magnetostrictive Equipment and Systems for more electric Air-
craft) project was launched, in order to reduce the power take up and the weight of
on-board aircraft systems through the development of magnetostrictive motors and
8

1 � More Electric Aircraft
actuators. In 2002 POA (Power Optimised Aircraft) was aimed to the validation
at aircraft level and both qualitatively and quantitatively, the ability of alternative
equipment systems to reduce weight, fuel consumption and maintenance costs. In
2004 the MESEMA (Magnetoelastic Energy Systems for Even More Electric Air-
craft) project was devoted to the development, production and test of `innovative
transducer systems based on active materials' aimed for high-torque actuation, vi-
bration and noise reduction, electrical energy generation and structural health mo-
nitoring. Structural dynamics, energy conversion in active materials and control
systems represent the scienti�c fundamentals of the project. This project was evol-
ved in two European research programs named `MADAVic' and `MESA' based on
the six years scienti�c and technological objectives reached by the MESEMA. The
follow-up of these �rst six years of research activities consisted, for the next future,
to carry out a more complex project, in which the base research activities still have,
as main targets, the reduction of internal noise in helicopters and turbofan aircraft;
the examination of the health status of aircraft structural components (by measu-
ring their dynamic structural responses); the replacing of the helicopter rotor blade
pitch angle actuation systems with an innovative one based on active material mem-
bers and reduced number of components; the transformation of mechanical energy
related to vibration �elds within aircraft into electrical energy thanks to the inverse
magnetostriction e�ect.
In 2006 the MOET (More Open Electrical Technologies) project, was aimed to esta-
blish the new industrial standard for electrical design system of commercial aircraft,
usable by the business and regional aircraft and rotorcraft as well. To create this
new standard, MOET will launch signi�cant changes in power management and use,
which up to now were not possible due to the technological limits, in conjunction
with the reducing on the aircraft emissions and improving the operational capacity.
Today the MEA/MEE topics play a relevant role in the research projects managed
by CleanSky, equally shared by the European Commission and industry, over the
period 2008− 2013. CleanSky will demonstrate and validate the technology break-
throughs that are necessary to make major steps towards the environmental goals
set by the European Technology Platform for Aeronautics & Air Transport and to
be reached in 2020.
NASA studies demonstrated that the use of such technologies could signi�cantly
9

1 � More Electric Aircraft
reduce the aircraft empty weight, the required engine thrust and the aircraft fuel
burn. These are signi�cant economical and environmental improvements [3]. For
these reasons, all the projects mentioned above have contributed the aircraft indu-
stry to the development of many electric equipments that are now installed in the
Airbus A380 and Boeing 787 (Fig.1.3), which are the today maximum expression of
the MEA concept.
Figure 1.3. Airbus A380 and Boeing 787 Dreamliner.
1.2 Main aircraft on-board systems
The modern aircrafts are an integration of complex interacting technological com-
ponents and powered by a sophisticated power distribution architecture. Moreover,
in order to guarantee high �ight safety conditions, an appropriate redundancy of
all the power connections is required. The conventional on-board secondary power
distribution system of the modern civil aircrafts is schematically depicted in Fig.1.4.
The main part of the fuel is converted into the aircraft propulsive power by the gas
turbine engine. The remaining non-propulsive fuel is converted into four di�erent
secondary power [1]:
• mechanical: transferred by the gearbox from the main gas turbine engine to
the main electrical generator, to the central and local hydraulic pumps and to
the other mechanically driven subsystems;
10

1 � More Electric Aircraft
Figure 1.4. Schematic conventional aircraft power distribution system.
• hydraulic: transferred from the central hydraulic pump to the �ight control
actuators and to the ancillary systems;
• pneumatic: obtained by bleeding high pressure engines' compressors;
• electric: obtained by the main electrical generator to supply all the the elec-
trical and avionics equipments.
Hydraulic systems are very robust and have a high power density, but the drawbacks
are the high weight and the in�exible pipes infrastructures; moreover there is the
potential leakage of dangerous and corrosive �uids.
The pneumatics power systems is mainly used to supply the environmental control
systems and supply hot air for the anti-icing systems. Their main drawbacks are
the di�cult in detecting leaks and the low e�ciency.
Electrical power systems are very �exible and does not require heavy infrastructures.
Their main drawbacks are usually their lower power density than hydraulic power
systems and are characterized by higher risk of �re in case of a short circuit [4].
Over the years each system has become more and more complex and interactions
11

1 � More Electric Aircraft
Figure 1.5. Schematic MEA power distribution system.
between the di�erent equipments reduce the e�ciency of the whole system. With
the MEA concept, the trend is towards the reduction or removal of the hydraulic
power generation and bleed air o�-takes. The removal of bleed air o�-takes requi-
res high-voltage electrical networks and new technological solutions for the cabin
air-conditioning, wing ice protection and electric engine start-up. The removal of
the engine hydraulic pumps requires fully-operative electrical power actuators. In
Fig.1.5 is depicted the schematic of the MEA power distribution system. The main
steps towards the MEA are substantially:
• current air and hydraulic engines removal and further electrical power genera-
tion capability increasing. As a consequnce, this requires a signi�cant change
in fault protection and in the electrical and network techniques;
• electromechanical actuators utilization instead of hydraulic actuators. This
reduces weight, maintenance and production costs.
As evident, electrical power utilization is emphasized by the MEA concept, in place
of hydraulic, pneumatic and mechanical power to optimize the aircrafts performance
and life cycle costs [4].
12

1 � More Electric Aircraft
To achieve the concept of a More Electric Aircraft, several key technologies are re-
quired. The technologies are interdependent and the aircraft level bene�ts cannot
be achieved without them all. For example it is possible that electric �ight control
actuators will be heavier than their hydraulic equivalents. The aircraft level bene�t
comes from the removal of the centralized hydraulic system and engine driven gear-
boxe and the integration of engine driven electric starter generators [5].
In the following sections a brief description of the main components involved in the
MEA re-engineering process are presented.
1.3 Hydraulic systems
The hydraulic systems had made their appearance on aircraft since 1930s, when
the retractable undercarriage was introduced. Since that time the hydraulic power
demand increased more and more because several tasks have been powered by hy-
draulic. It was seen as an e�cient energy vector to transfer power from the small low
energy movements in the cockpit to high energy demands actuators, in particular
for the �ying controls surfaces. For this reason the hydraulic systems have played an
important role to allow the pilots to move the control surfaces with every increasing
speeds and demands for manoeuvrability. This application intrinsically involves an
Figure 1.6. Simple hydraulic system.
13

1 � More Electric Aircraft
high critical hydraulic system safety, in which single failures could not be allowed
for the aircraft safety conditions.
In Fig.1.6 a simple hydraulic system is depicted [1]. The primary power is transferred
from the engine to the hydraulic pumps through the gearbox. The pump generates
a �ow of �uid at a certain pressure, through stainless steel pipes to various actuating
devices. In all the conditions of demand, a su�cient reservoir of �uid is ensured by
an appropriate reservoir. The system portrayed in Fig.1.6 is unlikely to satisfy the
safety condition stated above. In practice the hydraulic systems present on the mo-
dern aircrafts are developed with an appropriate redundancy of all its components,
using multiple pumps, accumulators to store energy and methods of isolating leaks.
The degree of redundancy necessary is very largely controlled by speci�cations and
mandatory regulations issued by the national and international bodies charged with
air safety [1].
In conventional wide-body aircraft, the actuation system of the �ight surfaces is
realized by a centralized hydraulic system, constituted by a hydraulic pump and
hydraulic motor drives positioned in the fuselage plus several �uid pipelines and
hydraulic actuators positioned in the wings and tail surfaces.
1.3.1 Flight surface control
In the wings and in the tail of a wide-body aircraft there are several surfaces that the
pilots can move/adjust in order to stabilize the airplane trajectory and to control
the lift on the wings. Examples of these surfaces are reported in Fig.1.7(a) and
Fig.1.7(b). The adjustable surfaces can be subdivide in two groups with respect to
their main functionality: the primary and secondary �ight controls. The primary
�ight controls (ailerons, elevator and rudder) are used to control the roll, pitch and
yaw even if they can perform secondary e�ects too (Fig.1.8). In particular, the
pitch control is exercised by four elevators located on the tailplane. Roll control is
performed by two aileron sections located on the trailing edge of each wing. The yaw
control is provided by three independent rudder sections located on the trailing edge
of the vertical stabilizer. This controls are associated with the aircraft yaw dampers,
which is used to damp uncomfortable oscillation which can occur during �ight. Each
of these systems are powered independently by a dedicated actuator powered by the
14

1 � More Electric Aircraft
(a) Wing control surfaces of a �xed-wing aircraft: 1. wing-tip, 2. low speed aileron, 3. high speed aileron, 4. �aptrack fairing, 5. Kruger �aps, 6. slats, 7. three slottedinner �aps, 8. three slotted outer �aps, 9. spoilers, 10.spoilers air-brakes.
(b) Tail of a LufthansaAirbus A319.
Figure 1.7. Civil aircraft �ight surface control examples (source: Wikimedia Com-mons. Commons is a freely licensed media �le repository, [6])
hydraulic systems. The secondary controls, also called high lift system, are used to
change the wing lift. It is performed by the �ap control, which are positioned on the
trailing part of the wing and are used to increase the wing area and camber. They
are particularly used during the take-o� or landing in order to change the lift for a
given speed. The overall lift of the aircraft can also be performed by the slats which
have the same function of the �ap. In order to reduce the lift as well as increase the
Figure 1.8. Primary control systems.
15

1 � More Electric Aircraft
drag, the air-brakes are used and permit to the pilot to adjust rapidly his airspeed
[1].
The number and type of actuators is very di�erent, with respect to the considered
aircraft. In addition, the load requirements are very di�erent too, starting from
few kilowatts for the edge slats, up to 50 − 60kW for the horizontal stabilizer and
the rudders [7]. Also the dynamic load pro�le can be quite di�erent, there are few
surfaces movements with very large extension and short duration (typically during
the landing and take-o�) or several `small' surface adjustments during the �ight
[8]. In addition, anomalous performance are generally requested to the actuators
in critical �ight conditions. Just for example, if all the engines on the same wing
fail, the rudder has to be able to keep the rudder in a �xed position, with high
yaw angle, during the �ight. In this situation, very high torque is requested at the
electric motor [9].
1.3.2 Advanced actuation implementations: FBW, EMA, EHA
Over the past 10-15 years a number of recent developments have found applications
in aircraft and may substitute the existing electro-hydraulic actuator. These newer
types of actuation are:
• direct drive actuation;
• Fly-by-Wire (FBW) actuation;
• Electro-Mechanical Actuator (EMA);
• Electro-Hydraulic Actuator (EHA).
The need of the servo valve in the direct drive actuator, commonly used in the hy-
draulic systems, is obviate employing an electrical drive. With a relatively small
electrical drive signal, the main power spool is directly driven by torque motors.
The advent of the Fly-by-Wire �ight control systems in civil aircraft commenced
with the Airbus A320, and subsequently further developed in the Airbus A380 and
Boeing 787 systems. In this technology, no mechanical links between the control
surfaces and the cockpit handles are present [10] [11]. In Fig.1.9 is schematically
shown the FBW actuator operating principles [1].
16

1 � More Electric Aircraft
Figure 1.9. Fly-by-Wire actuator (FBW).
The digital FBW demands or direct link demands are interfaced with the actuator
by means of an Actuator Control Electronics, which supply an analogue command
to the actuator Servo Valve (SV). A control loop on the actuator position is closed
to the ACE by the Linear Variable Di�erential Transducer (LVDT). Therefore, the
ACE performs two functions: conversion of digital �ight control demands into ana-
logue signal, and analogue loop closure around the actuator.
Moving towards a More Electric Aircraft scenario, the idea to control each surface
with an own directly coupled electro-mechanical actuator is a must. This concept is
de�ned as Power-by-Wire [11]-[13]. In Fig.1.10 is schematically depicted the EMA
actuator operating principles [1].
Figure 1.10. Electro-Mechanical Actuator (EMA).
17

1 � More Electric Aircraft
The EMA uses state-of-the-art power electronics and control technique to provide
more e�cient �ight control actuation. This is accomplished by using a three-phase
AC power to feed an electric motor and gearbox assembly which applies the mo-
tive force to move the actuator. The utilization of the EMAs for the �ight control
actuation, was possible after the technology advancements in the use of rare earth
magnetic materials in motors, high power solid-state switching devices, and micro-
processors controller [14]. The EMAs are used to power the tailplane horizontal
stabiliser on civil aircraft, �ap and slat drives. An example of an EMA for large
�ight surfaces is shown in Fig.1.11 [13].
Figure 1.11. High-power Electro-Mechanical Actuator (EMA) [13].
Due to safety reliability reasons, mainly concerning the jamming vulnerability (gear-
box or ballscrew for rotary-to-linear movements), the air framers have still now
some concerns to use EMAs for primary control surfaces preferring the most reliable
electric-hydraulic actuators.
The main advantage of an EHA is that the actuator can be controlled as a conventio-
nal hydraulic one, obtaining the traditional active-stand by or active-active device
operation [13]. In the EHAs there are still a hydraulic circuit, but it is just con�ned
in each actuator to transmit power from the electric motor to the surface [15]. In
Fig.1.12 and in Fig.1.13 are respectively shown the schematic operating principles
of an EHA actuator [1] and an example of an EHA for large �ight surfaces [13].
The EHA technology use the AC power to feed power drive electronics which in
turn drive a variable speed pump together with a constant displacements hydraulic
18

1 � More Electric Aircraft
pump. When there is no moving demand, the only power needed is that to main-
tain the control electronics. When a demand is received from the Actuator Control
Electronics (ACE), the power drive electronics react su�ciently rapidly to drive the
variable speed motor and hence pressurise the actuator, in order to move the asso-
ciated control surface to satisfy the demand. In this way a great saving of energy
is obtained as the power is only drawn from the aircraft buses during the actuator
moving.
In [13] is also presented the Integrated Actuator Package (IAPTM). This device is
an EHA that, thanks to an advanced dual-channel hydraulic circuit, allows to use
an unidirectional constant-speed electric motor. However, when the actuator is in
steady state, the hydraulic pump displacements is set to null position but the pump
continues to rotate at a constant speed imposing a signi�cant power loss and that
is the drawbacks of this solution. The EHA solution eliminates this problem.
Figure 1.12. Electro-Hydraulic Actuator (EHA).
Figure 1.13. High-power Electro-Hydraulic Actuator (EHA) [13].
19

1 � More Electric Aircraft
When some of the traditional hydraulic circuits are removed and substituted by
EMAs and/or EHAs, it is common to speak of More Electric Aircraft. With respect
to the �ight controls, the �rst application of EHAs to primary �ight surfaces was
in the delta-wing Vulcan bomber in the 1950s [16]. Its redundant design, achieved
using the EHAs, allowed to get an impressive safety record.
More recent examples of commercial MEAs are Boeing 787 and the Airbus A380.
In the Boeing 787, a mid-size wide-body aircraft, spoilers and horizontal stabilizer
�ight controls are operated by electric motors in order to control functionality also in
the case of a total hydraulic failure. As reported in detail in [16], in the A380 aircraft
many EHAs or EBHAs (Electro Backup Hydraulic Actuator) have been introduced
in several control surfaces, allowing redundant power sources for the surface actua-
tion. The EBHAs are actuators that provide backup electrical power at the surface
through a local electric motor and an associated hydraulic pump. EBHAs are hy-
draulically powered in the normal mode and electrically powered in backup mode.
Figure 1.14. Scenario of the EMA introduction in aircraft �ight control systems(Power source in the vertical axis on the left: M=Mechanical, H=Hydraulic,
E=Electrical; Actuator type on the right). Source [11].
On the basis of the previous considerations, the possibility of an electric actuation
of the �ight surface is beyond dispute for its potential advantages with respect to
conventional hydraulic solution [13], in particular for the expected bene�ts in terms
of overall weight reduction, better reliability, safety and reduced costs (maintenance,
20

1 � More Electric Aircraft
operational and fuel consumption). Fig.1.14 shows the future vision concerning the
introduction of the EMAs in aircraft �ight control systems [11]. As evident from
the �gure, the use of EMAs, deleting all hydraulic pumps and pipelines, is the next
step that has to be done to more and more approach the `all-electric-aircraft' idea.
Anyway, the maturity of this new concept has to be still proven by means of research
and applicative solutions, in particular from the safety and reliability point of view.
1.3.3 Electric motors and drives for EMA or EHA actuators
Both EMAs and EHAs use an electric motor and a power converter plus a control
system [17].
With respect to the electric motor, a literature review reveals that several type of
motor can be used, but it is shown that the Brushless DC (BLDC) and the Switched
Reluctance (SR) motors are the most promising choices due to their lightweight
characteristics [7], [9], [18]-[21].
The JAA (Joint Aviation Authority) are the fundamental aspects that characterize
the safety-critical systems of the aeronautical components [22]. Taking into account
the reliability level for �ight certi�cations, the electric drives have to be designed
including fault tolerant capabilities. As known, the fault-tolerant behavior can be
done using a redundancy approach or making the device itself fault tolerant. The
�rst approach is often used in the power converter (i.e. redundant inverter legs,
separated inverter for each motor phase, control system duplication, enhanced fault
diagnostic functions for the power electronic switches [9], [13], [20]), while the other
one is typically adopted for the electric motor. It is commonly reported that a
fault-tolerant electric motor for EMAs applications has to be guarantee:
• high torque/weight ratio;
• high torque/Ampere ratio;
• high e�ciency in the full speed range;
• electrical, thermal, magnetic and mechanical insulation between the phases;
• higher values of the phase inductance (in order to limit the short circuit cur-
rents);
21

1 � More Electric Aircraft
• safe operation in faulty conditions (one phase loss).
These characteristics can be obtained both with the SR and the BLDC machines.
Examples of surface-mounted permanent magnet BLDC motors with winding wound
around a single tooth allow to verify the previous reliability requirements were pro-
posed in [19] and [23].
The electric drivers have to be designed in accordance to the selected electric power
generation strategy: constant or variable frequency electric supply [16].
Also the power converter topology is discussed and analyzed in literature. The pro-
posed solutions regard the conventional Voltage Source Inverter (VSI) and matrix
converters. The converter topology in�uence several aspects, such as the requested
DC-link capacitor in the VSIs (with room and weight problems [24] and power qua-
lity management [8]) and the power quality issues for the matrix converters [7], [25].
It is important to remark that the possibility to have a intelligent control system in
each EMAs or EHAs allows to de�ne new fault detection strategies, including inci-
pient faults (thanks to testability features included in the electric drives) without
loosing the actuator functionality. As a consequence, a positive feedback is expected
in terms of safety, reliability and maintenance costs [4].
1.4 Pneumatic systems
The turbofan engine, which are used for propulsive purpose in the modern aircraft,
is a really e�ective gas generator.
The easy availability of high pressure and high temperature air from the compressor
section of the engine lends itself useful for provide pneumatic power. After the
cooling and pressure regulation, the engine bleed air is used to power numerous
on-board systems, either for reasons of heating, provision of motive power or as a
source of air for cabin conditioning and pressurization systems. In some aircraft air
driven pumps are used as additional means of providing aircraft hydraulic power.
The largest subsystem user of bleed air is the air system, in particular for the
cabin pressurization and for the cabin environmental control (cooling and heating).
The aircraft cabin pressurization is necessary to give a more comfortable operating
environment at the crew and passengers. The pressurization is achieved by a cabin
22

1 � More Electric Aircraft
pressure control valve which regulate the cabin pressure depending on the aircraft
altitude. Also the cabin air conditioning is an important task of the air system. The
conditioning system is designed so that the air enters the cabin from overhead ducts
and is extracted at �oor level, avoiding in this way the air �owing from front to
back in order to reduce the risk of cross-contamination between passengers. For this
reason, the system is also provided of opportune �lters to reduce viral and bacterial
contamination risk. The air volume in the cabin needs to be changed at frequent
intervals, usually every two or three minute [1]. Moreover water separators are used
for the humidity control. This is particularly important for the passengers comfort
at ground levels and low altitudes, since the amount of moisture in the air decreases
with increasing altitude.
Not only does the passengers and crew need air conditioning, but also the on-board
electronic equipments. In fact, the maximum temperature at which semi-conductor
component can safely operate is above 100◦C, although prolonged operation at this
temperature level can a�ect reliability.
However, there are other subsystems which use the engine bleed air for on-board
important tasks, as for example the wing and engine ice protection (de-icing) and
engine start.
The availability of high pressure air throughout the bleed air system represents a
resource of motive power to crank the main aircraft engines during the start cycle,
for example using the air from another engine which is already running. If any
engine is already running, it is possible to use a ground air supply cart or the air
from the Auxiliary Power Units (Section 2.2.3). In this way a pneumatic starter
motor located on the engine accessory gearbox is activated, which can crank the
engine to ∼ 15-20% of full speed by which the engine ignition is established and the
engine will pick-up and stabilize at the ground-idle round per minutes.
The de-icing consists in the provision of hot air for an ice protection of the engine
and the wings, or to dislodge the ice formed on the air-body surfaces. The aircraft
icing protection represents one of the greatest and critical �ight challenges for the
aircraft manufacturer engineers. The wings and engine need to be kept free of ice at
all times. The presence of ice on the wings can degrade the aerodynamic performance
of the wings, leading to an increased stalling speed with a consequent possible loss
of aircraft control. Similarly, the presence of ice in the engine system can cause
23

1 � More Electric Aircraft
engine damage with similar catastrophic results. The prevention of ice formation on
the wings and in the engine are performed by means of the heating of the interested
surfaces with hot engine bleed air. The de-icing system is constituted by a pipe
with appropriately sized holes to allow a �ow of air; the air �ow is modulated by the
electrically enabled anti-icing controller. Telescopic ducting and �exible couplings
are utilized for the movable slat structures and between adjacent slat sections in
order to accomodate the slat movements respect to the main wing when the slats
are activated. The engine anti-icing is similarly achieved.
Thought the conventional de-icing system is very e�cient, it reduces the main engine
e�ciency as a part of the air is extracted. It is characterized by an ine�cient aircraft
energy utilization, and it is incompatible with the new bladeless aircraft engine
structure. The introduction with the MEA concept of an electro-thermal de-icing
system, the previous drawbacks are overcome. Moreover, the electro-thermal system
presents an high �exibility as it can operate in di�erent form:
• anti-icing: the system is always operating and can prevent any quantity of
ice formation;
• de-icing: the system is activated in sequence in di�erent area in order to
reduce the energy consumption;
• hybrid: it is a combination of the previous two modality.
1.5 Electrical systems
The evolution and the research of new solutions for the electrical power system is
one of the main task of the aircraft design engineers.
In the past years, electrical systems have evolved as shown in Fig.1.15 [1]. During
the 1940s and 1950s, the typical electrical power system was the twin 28V DC sy-
stem; it was particularly used for the twin engined aircraft, allowing a load sharing
between the two generators. A 115V AC inverter was used to supply the �ight in-
struments.
In the following years, with the advent of the electrically actuated gear, the situa-
tion changed radically due to the much greater on-board power requirements. The
24

1 � More Electric Aircraft
aircraft was �tted with 115V AC generators driven by each engine, paralleling them
in order to provide the advantage of no-break power, increasing also the amount of
control and protection circuitry.
Figure 1.15. Civil aircraft electrical system evolution [1].
In the 1960s, the introduction of constant frequency AC generation was intrinsically
accompanied by reliability problems. In fact, for the 115V AC at 400Hz generation,
it has required the introduction of the Constant Speed Drive (CSD) to negate the
aircraft engine speed variation over the speed range. The CSD is a complex hydro-
mechanical devices which by their nature are not highly reliable.
The advances in the power electronic components technology, together with the
enhancements in the control electronics, have made the Variable Speed/Constant
Frequency (VSCF) systems a viable solutions in the last decades. The solid state
VSCF convert the variable frequency (or frequency wild) AC power from the genera-
tor into 400Hz constant frequency 115V AC, replacing the previous CSD unreliable
parts. This system is employed for example, in the F-18 �ghter, in the Boeing 737
and Boeing 777 (in this one only as backup AC power generator).
In the US military ambient, a great emphasis is being placed into the development
of 270V DC systems. In these systems, the 270V DC power coming from high power
25

1 � More Electric Aircraft
generators is in part converted into 115V AC 400Hz and in part into 28V DC for the
speci�c equipments and loads. This approach is more e�cient than the conventional
one, due to the lower power conversion required, with accompanying weight saving.
These developments are in the direction of the MEA concept where, as previously
mentioned, is intended to improve the electrical power capability instead of the other
power form.
In several conventional civil aircrafts, there are two main distribution power busses
on-board [26]-[28]:
• high power, three-phase, 115V AC, 400Hz devoted to large loads supply;
• low power, 28V DC, for avionics and battery-driven services.
The electrical generator is mechanically driven by the main engine shaft by means of
a Constant Velocity Gearbox (CVG), allowing to maintain constant the frequency
at 400Hz, similarly as the CSD used in the past. If the CVG is integrated inside the
generator, it is called Integrated Drive Generator (IDG) [29]. In Fig1.16 a schematic
constant frequency generation system is depicted [30].
Figure 1.16. Schematic constant frequency generation system (IDG).
Since the IDG removal is a must in the All Electric Aircraft concept, the industry
trend seems to be towards an AC variable frequency generation system, with a DC
high voltage distribution bus [26]. The variable frequency strategy does not require
the IDG (see Fig.1.17 [30]) and as a consequence, a higher system power density is
possible.
Taking into account that the generators can be driven by shafts with very di�erent
rotational speeds, it is reasonable to convert all the generated power into an unique
26

1 � More Electric Aircraft
Figure 1.17. Schematic variable frequency generation system (VSCF).
high-voltage DC distribution system output around the airframe. A high-voltage
distribution system allows to reduce the cables weight because the current is lower.
Moreover, the cables sizes are further reduced because in the DC system there is not
the reactive power �ow such as in the AC one, and there is not the skin e�ect due
to the high current frequency. In addition at the high voltage DC systems, it will
remain the low voltage 28V DC systems to supply the avionic equipments. The vol-
tage step-down between the high voltage DC distribution system and the loads can
be done in a centralized way for each load centers, as shown fo example in Fig.1.18
and reported in detail in [28]. In the modern more electric wide-body aircraft, there
is a transitory solution characterized by a hybrid AC and DC on-board distribution
systems. For example, in the Boeing 787, which has a total power requirements of
1MW, as shown in Fig.1.19 there is a 230V AC at variable frequency between 360Hz
and 720Hz, a 115V AC at 400Hz for components that need the traditional constant
Figure 1.18. Example of load center and distribution lines for a MEA [17].
27

1 � More Electric Aircraft
frequency supply (obtained from the previous by means of an electronic power con-
verter), a 28V DC bus for the avionics equipments, and a ±270V DC (540V DC)
sub-bus [26] [28] [31] [32].
The higher AC voltage (from 115V AC to 230V AC) as higher DC voltage introduc-
tion is mainly driven by the continuous increasing of the electrical on-board power
demand due to the MEA concept introduction. However the use of higher phase
voltage does require considerable care during design to avoid the possible e�ects of
partial discharge, otherwise known as `e�etto corona' [1].
Figure 1.19. Boeing 787 primary electrical distribution schematization.
28

Chapter 2
More Electric Engine
The progressive electri�cation of the on-board services, in accordance with the MEA
concept, involves an increase of the aircraft electrical loads and, as a consequence
heavy implications for the on-board electrical generation system. It should be very
probable that the next generation of very large civil aircraft will require up to 500kVA
per engine [26], [33], [34]. These resulting electrical power requirements encourage
the research of alternative solutions for the on-board generation rather than simply
scaling up existing technologies such as generator driven by gearboxes.
To address these challenges, many studies are in the direction of the so called More
Electric Engine (MEE), in which starter/generator electrical machines are integra-
ted within the main aircraft engines to generate electrical power. In this way, it is
possible to eliminate the CVG (or IDG), allowing in the MEE the wide frequency
generation [1]. The MEE concept will involve important mechanical and thermo-
dynamic implications in the engine design, making necessary a preliminary system
analysis in order to evaluate the integration feasibility with the actual mechanical
and environmental constraints.
In this chapter the main propulsive engines are presented, as an evolutionary step
up to the turbofan engine that equips the most modern civil aircrafts. Afterwards
some di�erent positions in the engine where the electrical machine can be integrated
are discussed, putting in evidence the constraints, advantages and drawbacks of each
one.
29


2 � More Electric Engine
air is compressed isentropically, the combustion occurs at constant pressure, and
expansion over the turbine occurs isentropically. As with all the heat engines, the
e�ciency is higher as higher is the combustion temperature. The upper limiting fac-
tor is due to the material that makes up the engine to withstand heat and pressure.
The jet engines used in the aerospace propulsion are gas turbines optimized to
produce thrust from the exhaust gases or from ducted fans connected to the gas
turbines. Jet engines that produce thrust from the direct impulse of exhaust gases
are called turbojets, whereas those that generate most of their thrust from the action
of a ducted fan are often called turbofan.
Nowadays, due to their good fuel e�ciency and high thrust, modern airplanes use
turbofan as propulsion system which, as previously stated, is the most modern va-
riation of the basic gas turbine engines.
As shown in Fig.2.2(a), the turbofan is composed by the main following parts:
• inlet fan;
• compressor stage;
• combustion chamber;
• turbine stage;
• output nozzle.
(a) Two-shaft aircraft turbofan engine. (b) Three-shaft aircraft turbofan en-gine [35].
Figure 2.2. Aircraft turbofan engines.
31

2 � More Electric Engine
The inlet air, coming into the engine by the inlet fan, passes through the compressor
stage and the combustion chamber, where it is mixed to the fuel and combusted.
After the combustion, the air expands through the turbine stage and goes out by
the output nozzle. The air that does not pass into the compressor stage after the
inlet fan �ows in external paths of the engine called by-passes. The ratio between
the inlet air part that �ows through the compressor stage and the one that �ows
in the by-passes is the by-pass ratio. The turbofan engine thrust is obtained both
from the turbines and from the fan, thanks to the by-pass ratio.
The compressor and turbine stages are typically subdivided into two or three parts
(depending on the technical approach of the manufacturers), connected by two or
three shaft respectively. In Fig.2.2(a) a two-shaft turbofan engine structure is depic-
ted, where it is possible to identify its main parts. In particular, the Low Pressure
(LP) and the High Pressure (HP) compressors and turbines are highlighted.
The LP shaft connects the inlet fan, the LP compressor and the LP turbine. Ex-
ternally to the LP shaft there is the HP shaft, which connects the HP compressor
at the HP turbine. The speeds of the two-shafts are di�erent and not constant,
depending on the operating conditions of the gas turbine engine. Typically, for a
two-shaft gas turbine engine, the LP shaft speed can approximately change in the
range 600-5000rpm and in the range 7000-18000rpm for the HP shaft.
A three-shaft turbofan engine structure is shown in Fig.2.2(b) [35]. In this case the
compressor and turbine stages are subdivide in three parts, interposing an inter-
mediate speed (IP) shaft in order to reduce the compression ratio of each one. As
a consequence, the speed range of each shaft is reduced, allowing a better thrust
management.
Typically, two-shaft turbofan design is adopted by Pratt & Whitney and General
Electric, meanwhile three-shaft turbofan design is usually adopted by Rolls-Royce.
In literature some research works dealing with the integration of electrical machines
for MEE applications in three-shaft turbofan structures are presented [36]. However,
in this dissertation, as stated in the following sections, referring to a General Electric
baseline turbofan engine, the two-shaft turbofan engine topology is considered as
reference to develop the system design considerations.
32

2 � More Electric Engine
2.2 Conventional on-board electrical power genera-
tion
As written in Section 1.5, in the conventional aircraft electrical systems, as well as in
MEA concept, the aircraft electrical components operate on many di�erent voltages
both AC and DC. There are several di�erent power sources on large aircraft to be
able to handle excessive loads, for redundancy and for emergency situations, which
include:
• engine driven AC electrical generators;
• Auxiliary Power Unit (APU);
• Ram Air Turbine (RAT);
• batteries;
• external power, i.e. Ground Power Unit (GPU).
The power used in normal �ight conditions by the entire aircraft is generated by AC
generators driven by the main engines through an appropriate accessory gearbox.
During the ground maintenance and for the engine starting, the power is provided
by the APU. Most aircrafts can use the APU during the normal �ight conditions
as backup power source. Otherwise, in case of generators or APU failure, RATs
are used as emergency power source. Obviously, external power may only be used
with the aircraft on the ground. In this case a GPU (portable or stationary unit)
provides AC power through an external plug on to the aircraft.
2.2.1 Accessory gearbox
In a conventional aircraft system, all the mechanically driven accessories, as for
example the electrical starter/generator, the hydraulic, oil and fuel pumps, etc., are
driven by the power drawn o� from the high pressure shaft of the main gas turbine
engine.
In Fig.2.3 two example of gearbox are shown. As evident from these �gures, the me-
chanical torque is transferred from the engine HP shaft (HP spool) to the accessory
33

2 � More Electric Engine
gearbox (AGB) by the Inlet Gearbox (IGB) and the power transmission gearbox or
Transfer Gearbox (TGB). All these systems together constitute the so-called Acces-
sory Drive Train (ADT). In Fig.2.4 a Trent1000 engine produced by Rolls−Royce
is reported, where is putted in evidence the accessory gearbox; moreover, with dif-
ferent colors of the compressor and turbine stages, it is highlighted the three-shaft
topology, typical for Rolls−Royce.
Figure 2.3. Example of gearboxes [37].
Figure 2.4. Roll Royce Trent 1000.
34

2 � More Electric Engine
The accessory gearbox enables accessories to be connected to the engine HP shaft,
allowing in this way also an electrical starting of the engine by the starter/generator.
It is also a convenient place to obtain measurements of engine rotational speed by
measuring the speed of rotation of the gearbox using a tachometer or pulse probe
[1]. Some example of typical services that are driven by the accessory gearbox are:
• electrical generators;
• hydraulic pumps;
• fuel pumps;
• oil pumps.
The electrical generator is mechanically driven by the AGB by an interposed Con-
stant Velocity Gearbox (CVG), which maintains constant the rotational speed of
the generator shaft, allowing in this way a constant frequency generation [26]. If the
CVG is directly integrated inside the generator, it can be named Integrated Drive
Generator (IDG). The constant speed is obtained with an epicyclical di�erential, a
variable displacement hydraulic unit and a �xed one that drive the generator.
This system can therefore provide constant output speed while the input speed (e.g.
engine shaft speed) can vary depending on engine throttle. This is achieved by using
hydraulic devices to add or subtract speed to or from one arm of the di�erential.
Considering the MEA concept, the use of this system appears not to be the best
choice because it uses hydraulic components [29]. Moreover the gearbox requires
constant maintenance, particularly for the lubrication system. As stated in Chapter
1, one of the alternatives frequently suggested is to remove the CVG (or IDG) and
to use electrical systems which can deal with variable frequency.
2.2.2 Engine driven AC electrical generator
Nowadays, as typical today aircraft generator is the three-stage synchronous ge-
nerator with wound �eld brushless exciter. It is usually realized with laminated
stator core with three-phase armature winding distributed in slots and a wound
rotor with salient pole. This is a high performance machine and is inherently safe,
because the �eld excitation can be removed, de-energizing the machine [27], [39]. In
35

2 � More Electric Engine
Fig.2.5(a) and in Fig.2.5(b) the operating principle and the electrical schematic of
the conventional AC generator are depicted [1], [26]. It can be subdivided in:
• a permanent magnet generator;
• an excitation stator surrounding an excitation rotor containing rotating diodes;
• a power rotor encompassed by a power stator.
(a) Operating principle.
(b) Electrical schematic.
Figure 2.5. Operating principle and electrical schematic of conventional AC gene-rator.
36

2 � More Electric Engine
The excitation system of the brushless exciter is stationary, i.e. PMs or DC electro-
magnets are �xed to the stator facing the exciter armature winding. In the case of
a DC electromagnets, the DC current can be supplied from an external DC source,
main armature winding via recti�er, or from a small PM generator (sub-exciter)
with stationary armature winding and rotating PMs. Rotating PMs are located on
the shaft of main generator [39]. The rotation of the excitation rotor within the �eld
produced by the excitation stator winding is recti�ed by means of diodes contained
within the rotor. These rotating diodes supplies a regulated and controlled DC vol-
tage to excite the power rotor windings. The rotating �eld generated by the power
rotor induces an AC voltage in the power stator.
The speed of contemporary aircraft generators is typically from 7000 up to 24000rpm
and output power from 30 up to 250kW [39]. The mechanical shaft speed and the
output frequency can be both constant or variable, subdividing the generators in
the following three main categories:
• constant speed constant frequency (CSCF) generators;
• variable speed constant frequency (VSCF) generators;
• variable frequency (VF) generators.
In the case of VSCF and VF generators, the mechanical connection between the ge-
nerator and the accessory gearbox is made without the interposition of the CVG/IDG,
because the generator shaft speed can be variable in these cases.
The frequency of the magnetic rotor �ux of a synchronous generator with brushless
exciter is speed dependent, i.e. the frequency of the excitation �ux decreases as the
speed decreases. Using the CVG (or IDG) systems, the output frequency of the con-
ventional aircraft generator is 400Hz. Concerning the voltage, the aircraft generator
are usually realized with a three-phase windings connected in a star con�guration,
with a phase and line-to-line voltages equal to 115V AC and 200V AC respectively.
In Fig.2.6 two example of a modern AC generators are shown.
In order to minimize the overall dimensions of the aircraft generators, the ferroma-
gnetic circuit is realized with low core loss ferromagnetic thin laminated materials, as
for example iron-cobalt alloys. The iron-cobalt alloys have high saturation magnetic
�ux density (about 2,4T at room temperature) and an high Curie temperature which
37

2 � More Electric Engine
Figure 2.6. Example of modern AC aircraft generator.
make it particularly suitable for elevated temperatures application. Typical alloy
used for AC aircraft generator is Hiperco 50 from Carpenter 1. Similar to Hiperco 50
is Vaco�ux 50 (50%Co) cobalt-iron alloy from Vacuumschmelze, which is typically
used for manufacturing very high �ux density pole-shoes, motors and actuators with
very high torques and forces.
The stator is typically equipped with a three-phase winding. The slots, usually with
a trapezoidal or oval semi-closed shapes, are in a number varying from 24 to 108,
and a number of stator slot per pole per phase from 4 to 10. Higher is the number
of slot per pole per phase, in concomitance with a double layer chorded winding,
lower is the contents of higher space harmonic in the airgap magnetic �ux density
waveforms. Moreover, higher is the rated speed of the generator, lower is the num-
ber of coil turns and higher is the number of parallel wires. The heat transfer from
the stator core to the stator enclosure or liquid jacket is facilitated by a corrugated
stator outer surface.
Regarding the rotor, it is usually made of the same material as the stator core. The
number of salient rotor poles is typically from 2 to 12, with round semi-closed slots
to accomodate the damper. Metal wedges between poles are used to protect the
rotor coils against centrifugal forces; sometimes rotor non-magnetic retaining sleeve
are used for this purpose [39].
The shaft diameter of the rotor (machine innermost diameter) mainly depends on
1Hiperco 50 is characterized by a mass density equal to 8120kg/m3, electric conductivity of2.5 × 10
6S/m, thermal conductivity of 29.8W/(mK), Curie temperature of 940◦C, speci�c corelosses of about 44W/kg at 2T 400Hz and thickness from 0.15 to 0.36mm [38].
38

2 � More Electric Engine
the rotor critical speed, as at high rotational speed the rotor dynamics problems are
much more serious than lower rotational speed [41].
In Tab.2.1 are listed the power generation types developed for civil and military
aircraft platforms throughout the 1990s [1], [26].
Generation type Civil application Military application
IDG/CF B777 2x120kVA Eurofighter Typhoon
[115VAC/400Hz] A340 4x90kVA
B737NG 2x90kVA
MD-12 4x120kVA
B747-X 4x120kVA
B717 2x40kVA
B767-400 2x120kVA
VSCF (Cycloconverter) F-18C/D 2x40/45 kVA
[115VAC/400Hz] F-18E/F 2x60/65 kVA
VSCF (DC Link) B777 (Backup) 2x20kVA
[115VAC/400Hz] MD-90 2x75kVA
VF
[115VAC/380-760 Hz Gobal Ex 4x40kVA Boeing JSF 2x50kVA
typical] Horizon 2x20/25kVA
A380 4x150kVA
VF B787 4x250kVA
230VAC
Table 2.1. Recent aircraft power system developments.
2.2.3 Auxiliary Power Unit (APU)
An Auxiliary Power Unit (APU) is a small gas turbine designed as an energy and
power generator rather than a thrust provider (which is the case for the main engi-
nes). It is a device used to provide power during the ground maintenance operations
making the aircraft independent by the ground support, or in �ight conditions as
backup power source. During the �ight the APU is usually in operation to supple-
ment the primary power supply or to replace it in case of engine failure. In modern
39

2 � More Electric Engine
large civil aircraft, the auxiliary power unit is positioned in the rear part of the
airbody. Fig.2.7 shows a picture of the APU positioning on a B737.
At the ground, the primary purpose of the APU is to provide power to start the
Figure 2.7. APU positioning on a B737.
main gas turbine engines, and to run accessories while the engines are shut down.
This allows the cabin to be comfortable during the passengers boarding before the
start of the aircraft engines. Electrical power is used to run systems for pre�ight
checks. APUs are usually connected by a gearbox to one or more electrical gene-
rators which are characterized by a rated power lower than the rated power of the
main aircraft generators.
For example, the Boeing 777 is equipped with a two 120kVA, 115V AC, 400Hz engine
driven generators and one 120kVA, 115V AC, 400Hz APU driven generator. The
`more electric' Boeing 787 is equipped with two 250kVA, 230V AC VF generators
per engine and two 225kVA, 230V AC VF APU driven generators (see Fig.1.19).
The Airbus A380 is equipped with four 150kVA VF main engine driven generators
and two 120kVA, 400Hz CF APU driven generators.
40

2 � More Electric Engine
2.2.4 Ram Air Turbine (RAT)
The Ram Air Turbine (RAT) is a small propeller installed in the aircraft and used
as power source. It is spanned by the high speed of the air �ows near the airframe
body (Fig.2.8).
The RAT is deployed in case of emergency, when most of the conventional power
Figure 2.8. Example of Ram Air Turbine. Source [42].
generator system has failed or is unavailable for some reasons. The RAT is normally
stowed in the aircraft ventral or nose section and is extended either automatically
or manually when the emergency commences. The turbine is used to power a small
emergency generator of limited capacity, enough to power the crew's essential �ight
instruments and a few other critical services. Typical RAT generator sizing may
vary from 5 to 15kVA depending upon the aircraft [1]. A smaller hydraulic power
generator is also powered by the RAT for similar emergency power provision. Some
RATs produce only hydraulic power, which is in turn used to power electrical gene-
rators.
Today, the largest RAT propeller is adopted by the Airbus A380, which has a 1.63m
of diameter, but around 80cm is more common. The propellers started to be reali-
zed as two-bladed of four-bladed models but military (and increasingly commercial)
models use ducted multi-blade fans today.
Obviously the RAT are able to generate emergency power only in �ight conditions.
Once deployed, the RAT remains extend for the duration of the �ight and cannot
be retreated without maintenance action on the ground.
41

2 � More Electric Engine
2.2.5 Batteries
In each aircraft are present batteries as DC electrical power source. They provide an
electrical storage medium independent from the primary generation sources. Their
main purposes are:
• to assist in damping transient loads in the DC system;
• to provide power in system startup modes when no other source is available;
• to provide short-term high-integrity source during emergency conditions.
Most modern aircraft systems utilize battery charger to maintain the battery at
moderately high energy levels during normal system operation. To preserve battery
health, it is usual to monitor its temperature which gives a useful indication of over-
charging and if thermal runaway is likely to occur.
The most commonly used battery is the nickel-cadmium (Ni-Cd) type; lead-acid
batteries are usually avided in modern applications due to corrosive e�ects.
In modern civil aircraft, typical batteries capacity are within 30-50Ah, in a number
varying from two to four plus that used in the APU.
2.2.6 Ground Power Unit (GPU)
When an aircraft lands and shut down the engines, it is hooked up to the Ground
Power Unit (GPU), which supplies power to the aircraft. All aircrafts require 28V
of direct current along with 115V three-phase 400Hz of alternating current. The
aircraft ground power unit has a generator that carries this electric energy to a
connection on the aircraft by using a thick cable. The power is generated in the
APU by means of a motor-generator set where a prime motor drives a dedicated
generator. In Fig.2.9 example pictures of GPUs are showed.
In this way, the aircraft is being powered while it is on the ground by using the
aircraft ground power unit. The noise is eliminated along with saving fuel costs and
dispersing any type of emission.
42

2 � More Electric Engine
Figure 2.9. Ground Power Unit (GPU).
2.3 Shaft-line embedded on-board electrical power
generation
The requirement of electrical power aboard is forecast to rise dramatically in the
future as a result of increased cabin loads for improved in-�ight entertainment, in-
formation services, passenger comfort and the advent of more new electrical loads
such as electrical actuation for �ight surfaces and landing gear, in accordance with
the MEA concept. The on-board electrical power evolution trend over the years for
the main used civil aircraft is showed in Fig.2.10, meanwhile the electrical generator
arrangements for the di�erent solutions are listed in Tab.2.2.
It is estimated that the electrical power requirement will be more than 500kVA per
engine in the future. To reduce the general system complexity, failure probabilities
and with the aim to increase the general system e�ciency, there are several studies
devoted to the integration of the electrical generators directly inside the main gas
turbine engines. This concept is called More Electric Engine (MEE).
In this way the CVG (or IDG) systems could be, partially or at all, eliminated. As
a consequence, the generated fundamental frequency can change over a wide range
in function of the engine speed variation, depending on the engine throttle [26], [27],
[33], [34], [43].
43

2 � More Electric Engine
B787
1600
VA
]
B787
1200
1400
1600
era
tio
n [
kV
A]
A380
B787
800
1000
1200
1400
1600
we
r g
en
era
tio
n [
kV
A]
A300A320
A340
B777
A380
B787
600
800
1000
1200
1400
1600
ect
rica
l p
ow
er
ge
ne
rati
on
[k
VA
]
B747
A300
B767A310
A320
A340
A330
B777
A380
B787
200
400
600
800
1000
1200
1400
1600
nst
all
ed
ele
ctri
cal
po
we
r g
en
era
tio
n [
kV
A]
B747
A300
B767A310
A320
A340
A330
B777
A380
B787
0
200
400
600
800
1000
1200
1400
1600
1965 1970 1975 1980 1985 1990 1995 2000 2005 2010 2015
Inst
all
ed
ele
ctri
cal
po
we
r g
en
era
tio
n [
kV
A]
B747
A300
B767A310
A320
A340
A330
B777
A380
B787
0
200
400
600
800
1000
1200
1400
1600
1965 1970 1975 1980 1985 1990 1995 2000 2005 2010 2015
Inst
all
ed
ele
ctri
cal
po
we
r g
en
era
tio
n [
kV
A]
First flyght year
B747
A300
B767A310
A320
A340
A330
B777
A380
B787
0
200
400
600
800
1000
1200
1400
1600
1965 1970 1975 1980 1985 1990 1995 2000 2005 2010 2015
Inst
all
ed
ele
ctri
cal
po
we
r g
en
era
tio
n [
kV
A]
First flyght year
Figure 2.10. On-board electrical power evolution.
Aircraft Generation
A300 2x90kVA (1xEngine) + 90kVA APU
B767 2x120kVA (1xEngine) + 120kVA APU
A310 2x90kVA (1xEngine) + 90kVA APU
A320 2 90kVA (1 E i ) 90kVA APUA320 2x90kVA (1xEngine) + 90kVA APU
B747 4x90kVA (1xEngine) + 2x90kVA APU
A340 4x75kVA (1xEngine) + 115kVA APU
A330 2x115kVA (1xEngine) + 115kVA APU
B777 2x120kVA (1xEngine) + 120kVA APU
k ( ) kA380 4x150kVA (1xEngine) + 2x120kVA APU
B787 4x250kVA (2xEngine) + 2x225kVA APU
Table 2.2. Conventional on-board electrical power generation.
The modern turbofan engine is an optimized complex system. The electrical ma-
chine integration will change the air�ow inside the engine, modifying signi�cantly
the complete engine e�ciency. In particular it is important to highlight that the
44

2 � More Electric Engine
embedded generator interfere with the air�ow throughout the engine. Therefore the
MEE concept intrinsically involves a complete mechanic and thermodynamic turbo-
fan components revisiting in order to optimize its functioning.
The design of aircraft engine is a di�cult, high time consuming and complex task for
the aerospace engineers. The e�ective feasibility of the embedded generator solution
has to be �rstly analyzed and studied taking as a reference baseline a today con-
ventional aircraft gas turbine engine, evaluating a trade-o� study of the integration
of the electrical machine inside it. In this way, a future development of an accurate
engine design optimized for the embedded generator integration could be planned
by the aerospace engine manufacturers.
Figure 2.11. Possible electrical machine integration positions.
As showed in Fig.2.11 for a two-shaft engine, the electrical machine can be integra-
ted inside the main engine in some di�erent positions, either in the front part before
the combustion chamber (close to the LP or HP compressor), or in the tail cone zone
(the same integration position are also possible for a three-shaft engine with di�e-
rent shafts speed range). In particular, the generator can be driven by the LP shaft
as well as by the HP shaft. These two possibilities involve di�erent advantages and
disadvantages, mainly concerning the dimensions, speed and environmental working
conditions. When the LP shaft integration is selected, the generator is characteri-
zed by a lower rotational speed, but higher radial dimensions to achieve the same
rated power with respect to the HP shaft integration solution. However, the LP
shaft integration guarantees better environmental conditions, especially regarding
45

2 � More Electric Engine
the ambient temperatures, respect to the HP shaft integration which is closer to the
combustion chamber. In the tail cone location the operating temperatures can be
very high, due to the combusted air �ow.
The LP shaft connects the low pressure compressor, turbine and the inlet fan. As a
consequence, with an appropriate design of the electrical machine driven by the LP
shaft, the windmill e�ect can be exploited [45]. In this way it is possible to generate
electricity in case of a catastrophic engine failure, removing the actual ram-air sy-
stems and its high maintenance costs [33]. However, since the fan rotational speed
during the windmill is low, the required working speed range of the generator is very
challenging (around 12-14 : 1, [26]).
In the HP shaft integration, the electric machine is characterized by a lower weight
and it takes up a lower room, due to the higher rotational speed of the shaft. In
addition, this solution allows to use the electric machine as engine starter, avoiding
in this way the pneumatic auxiliary dedicated system. Anyway, due to the high
inertia of the HP gas turbine, a large torque motor capability is required at zero
speed too for the engine starting task [26], [45]. The main drawback of the HP shaft
integration is the harsh environmental working conditions, mainly due to the high
ambient temperatures.
It is important to remark that in the turbofan the starting task can be achieved only
by the HP/IP shaft rotation, because the typical compression ratio produced by the
LP compressor in drag conditions is not su�cient to generate in the combustion
chamber the necessary conditions for the air-fuel mixture ignition.
In the technical literature concerning the MEE concept and in the related research
activities and projects (Section 1.1), there are some proposed electrical machines
solutions and prototypes for MEE applications. In the next sections a literature
review about these solutions and the electrical machines typology adopted for the
MEE application are presented, putting in evidence the integration positions inside
the engine and the technical characteristics of the electrical machines.
46

2 � More Electric Engine
2.3.1 Electric machines for MEE applications: remarks and
literature review
The most common electrical machines proposed in literature for MEE applications,
are the Switched Reluctance (SR) and the Permanent Magnet (PM) machines. Some
valuable examples and comparisons of these machine types are reported in [27], [33],
[45]-[48].
The switched reluctance machines are characterized by an intrinsic high fault tole-
rance, high ruggedness and construction simplicity. Another important aspect that
makes this kind of machine interesting for this application, is the possibility to use
a single-slot coil pitch winding structure. Therefore the stator coil overhangs length
are very short and the coils results electrically insulated [44]. The main disadvanta-
ges of the SR machines are their usually lower power and torque density respect to
the PM machines, high ventilation losses, small airgap and the necessity of a more
complicated power converter.
Regarding the PM machines, they can be designed in several structures: with surface
mounted magnets (often using Halback array magnets arrangement), �ux concen-
trating geometries, radial or axial �ux topologies, inside-out radial structure, etc.
The PM machines are characterized by high volumetric and gravimetric power den-
sity, small losses in the rotor, (with the consequent cooling facilities), and high pole
number (usually realized with fractional-slot windings in order to reduce the end-
winding length and to get the phases decoupling). The main disadvantage of this
kind of electrical machines is their unavoidable intolerance to high temperatures,
due to the PMs presence. An important aspect of the PM machines is their intrinsic
permanent �ux, which can not be shut down in case of fault.
In the literature other machine types are considered and analyzed for this appli-
cation, such as induction motors [44], and special hybrid machines [27], [33], [49].
Induction motors are relatively rugged, but they are characterized by lower power
density with respect to SR and PM machines.
The hybrid structures presented in the references are realized with a two-parts rotor,
composed by a surface mounted PM and a variable reluctance section. In these pro-
totypes an high direct-axis inductance and an improved machine's torque capability
at low speed (due to the additional reluctance torque) are obtained. A high value
47

2 � More Electric Engine
of direct-axis inductance allows to obtain a constant-power speed range regulation
using �eld-weakened strategies [33]. This characteristic is very interesting because
the speed of the engine shafts are not constant due to the not constant speed of the
engine shafts.
Independently of the selected machine type, the literature review shows an interest
in ring shape motors (low axial core length/diameter ratio) in order to accommodate
the geometry constraints inside the jet engine.
2.3.2 State-of-art of designs and prototypes for MEE appli-
cation
In the recent technical literature, some research and technical works deal with the
electrical machines design and analysis for the MEE application. These activities
were carried out by Universities or research centers as well as aerospace manufactu-
ring companies. However, as these topics are quite new and still in progress, not all
the technical data are published by the authors.
In this section the state-of-art of the proposed designs and prototypes for MEE
applications is reported. In particular the focus is on the Rolls-Royce and POA
projects which are the most documented research activities in literature.
At the end of the section (in Tab.2.6) the main design parameters of the described
prototypes are summarized.
2.3.2.1 Rolls-Royce solutions
The Rolls-Royce company, in co-operation with the University of She�eld (UK),
has designed two types of integrated electrical starter/generator in accordance at
the MEE concept. The reference baseline gas turbine engine for the analysis is not
given in the published documentation, but it is reasonable to think about a three-
shaft engine topology as usually made in the Rolls-Royce gas turbine engines design.
In [44] the preliminary design of a PM and SR machine for the integration in the
tail cone zone are presented. Nevertheless the critical ambient conditions, the tail
cone zone has been chosen by the authors for the study because its installations and
maintenance facilities. Both the electrical machines have been properly designed in
order to generate 25kW in windmilling condition, and a nominal power achievable
48

2 � More Electric Engine
under normal �ight conditions greater than 150kW. Parallel coils design is adopted
for both the machines to connect separate parallel converter modules which give the
bene�t of built-in partial redundancy.
Taking into account the main advantages and drawbacks of each type of machine
reported in the paper (refer to Section 2.3.1 of the present dissertation), even if (as
stated by the authors) the performed comparison based on the preliminary design is
not su�cient to form a proper basis for a choice between the PM and SR machine,
a number of initial conclusions have been drawn.
In particular both types of generators have substantial mass (exceeding 100kg inclu-
ding non-active weight) which is required just to meet the nominal power of 25kW
at 250rpm in windmilling condition. A greater fault tolerant capability is obtained
with the SR machine. Nevertheless also with the PM an high fault tolerant ca-
pability is achievable, in principle, retaining the high synchronous reactance whilst
increasing the conductor section to ensure satisfactory withstand of the short circuit
current. This solution would inevitably introduce a size penalty, but has important
operational and safety bene�ts.
In [45] the same authors present the comparison between three di�erent PM ge-
nerators positioned in the engine tail cone, two of which are directly connected to
the LP shaft (one air cooled and the other one oil cooled), and the third (oil cooled)
connected to the same shaft by means of an interposed gearbox.
In this paper the PM generator topology is chosen for its high speci�c weight and
good e�ciency throughout the speed range. Moreover it is easy to cool, suitably
rugged and potentially more reliable than the conventional wound �eld generator.
The designed machines are characterized by a 250kW rated power with speed range
varying from 1050rpm up to 3100rpm and an emergency output of 25kW at 250rpm
(windmilling condition).
All the three generators have been designed with a 5-phase modular fault-tolerant
stator winding with each coil wound around a single tooth.
The main parameters and performances data of these machines are listed in Tab.2.3.
The two solutions directly connected to the LP shaft are characterized by two di�e-
rent cooling conditions: one is cooled by the by-pass bleed air, the other is cooled by
the engine oil. In order to obtain the same performance, the air cooled generator is
49

2 � More Electric Engine
characterized by an higher overall weight due to the lower material utilization conse-
quent to the lower air thermal capacity. For what concerns the generator connected
to the LP shaft with interposed the gearbox (oil cooled), it is characterized by a
lower active weight because the higher rotational speed; however, the total weight is
much higher (but lower respect to the direct drive solutions) then the active weight
because the gearbox presence.
In the conclusions the authors highlight the feasibility of the aircraft engine integra-
ted generator for MEE application in comparison to the gearbox interposed solution.
Oil-cooled Air-cooled Geared
Rated power 250kW 250kW 250kW
Base speed 1050rpm 1050rpm 10500rpm
Base frequency 245Hz 245Hz 525Hz
Number of poles 28 28 6
Number of slots 40 40 36
Magnet type Sm2Co17 Sm2Co17 Sm2Co17
Effective airgap 3.0mm 3.0mm 9.0mm
Stator OD 464mm 544mm 206mm
Stator bore 350mm 400mm 148mm
Number of phases 5 5 2x3ph
Active weight 128kg 201kg 52kg
Total weight 191.4kg 257kg 161.2kg
EMF/phase 136.7V 145.8V 59.2V
Current/phase 385A 361A 720A
Current density 10.6A/mm2
5.6A/mm2
11.2A/mm2
Full load efficiency 95.1% 96.7% 96.9%
Performance at base speed
Table 2.3. Main parameters and performances of the machines presented in [45].
In [46] the design of a 250kW fault-tolerant PM generator for the MEA/MEE
application is presented by Roll-Royce in co-operation with the University of Shef-
�eld (United Kingdom). The paper describes in detail the design of a PM generator
directly connected to the LP shaft and located in the tail cone of a large civil air-
craft engine. In particular the research focus in on the design of a 250kW generator
that operates over a speed range of 1050rpm up to 3100rpm. In the paper, some
considerations regarding the selection of the PM machine topology, phase number
and pole/slot combinations are reported, with particular reference to achieving the
desired fault-tolerance and power density.
50

2 � More Electric Engine
The designed machine is air-cooled by the engine by-pass air rather than the more
elaborate and high maintenance liquid-cooled methods. Obviously, although the air-
cooling is preferable in terms of simplicity and reliability, it will inevitably result in
a larger machine than its liquid-cooled counterpart. Moreover, the cooling available
at any operating point changes throughout the �ight cycle, with the worst condition
in terms of cooling at the beginning of the aircraft descent.
The machine is designed with particular attention at its fault tolerant capability,
i.e. it should be able to operate at rated power (or near) in the event of a fault
within the machine or its converter. The generator is made with a stator winding
layout with alternate wound teeth, in order to physically separate the phases. In
Tab.2.4 the generator speci�cation are summarized; the generator design details are
given in Tab.2.5. In Fig.2.12 the cross section of one quarter of the 5-phase machine
design is shown where the phases positions inside the slots are highlighted. The
Continous output power 250kW
Speed range 1050 to 3100 rpm
Emergency output 25kW at 250rpm
Cooling By-pass air
Location Engine tail-cone
Maximum stator temperature 200°C
Maximum rotor temperature 150°C
Table 2.4. Design speci�cations of the Rolls-Royce LP generator [46].
Phases 5
Coils per phase 4
Stator outer diameter 554mm
Stator bore diameter 400mm
Stator tooth body width 22mm
Stator slot depth 53mm
Stator and rotor axial lenght 185mm
Airgap 3mm
Magnets Sm2Co17
Magnet pole arc 140 °e
Magnet radial thickness 15mm
Number of series turns per coil 8
Table 2.5. Design detail for Rolls-Royce LP generator [46].
51

2 � More Electric Engine
Figure 2.12. Cross section of one quarter of the 5-phase machine designed byRolls-Royce [46].
Figure 2.13. Complete geometry of the machine designed by Rolls-Royce with the�nite element predicted magnetic �eld distribution [46].
complete geometry of the machine with the �nite element predicted magnetic �eld
distribution in the generator is shown in Fig.2.13.
In the paper a detailed discussion about the design trade-o� involved in achieving
the necessary fault tolerance, the impact of generator losses and cooling are repor-
ted; also the in�uence of the number of coil per phases and pole pairs on the mutual
inductance values and on the magnet eddy currents are discussed.
Some FEM simulation results aimed to predict the machine performance in terms of
52

2 � More Electric Engine
Electro Motive Force (EMF), torque and cogging torque are reported. The predicted
stator iron losses density at rated power, evaluated with a FEM analysis, and the
stator temperature distribution of healthy machine on full-load are given too.
In [47] the experimental tests of the above described machine are reported, put-
ting in evidence its performances under both healthy and fault conditions. In par-
ticular the general description of the testing rig adopted to perform the tests is
reported. The generator is coupled with an in-line torque transducer to the shaft
of a 350kW dynamometer which provides the mechanical input power at a given
regulated speed. Five separate H-bridge converters are employed to control the ge-
nerator phase currents and hence to regulate its output power over a wide speed
range. A dSPACE hardware-in-the-loop system is used to control each H-bridge
converter.
In [36] some design parameters and the initial testing results of a SR outer seg-
mented rotor machine designed by Rolls-Royce in co-operation with the University
of Newcastle are reported. The selected location for these research activities is the
front-part of the engine, in the IP compressor stage. The machine has been desi-
gned to be line-embedded with the IP shaft (in accordance with the Rolls-Royce
designing philosophy, the selected baseline turbofan for the study is a three-shaft
engine). With the IP shaft connection the electrical machine can perform both the
starting and the generating functions. As stated before, the IP/HP compressor lo-
cation is characterized by harsh environmental conditions, in particular for the high
ambient temperature which can reach peak around 350◦C.
The required powers and speeds for the machine are 0 to 4000rpm motoring with a
maximum power of 192kW and 4000 to 13000rpm generating at 200kW. In the paper
two di�erent topologies of SR segmented rotor machine are analyzed: one with inner
rotor, and one with outer rotor. Both of them are made with cobalt alloy lamination
steel (Hyperco 50HS). The inner rotor structure is characterized by 18 stator teeth
and 10 rotor segments, the outer rotor machine has 18 stator teeth and 15 rotor
segments. The segmented machine has been found to be signi�cantly smaller than
machines with conventional switched reluctance rotor magnetic circuits. However
the authors have established that retaining the segments against centrifugal forces
53

2 � More Electric Engine
is far from simple.
To validate the design methods used, an outer rotating structure prototype has been
developed. In order to keep the costs down, the prototype has been made with con-
ventional materials; low carbon lamination steel are used for the magnetic circuit
and the winding are made using copper/polyimide multi-stranded (Litz) wire.
In the paper are not reported any design parameter of the constructed prototype or
analyzed machines. In Fig.2.14 some pictures of the prototype are shown.
(a) (b) (c)
Figure 2.14. Picture of the Rolls-Royce SR prototype [36].
2.3.2.2 POA Project solutions
In the frame of the POA project (Section 1.1), a PM prototype for the HP compres-
sor stage and a SR prototype for the tailcone zone have been constructed.
Regarding the PM machine, in [50] some pictures and the main design parame-
ters are reported. The study has been conducted considering the Rolls-Royce Trent
772B-60 as baseline reference gas turbine engine, which is characterized by a three-
shaft design. The PM machine is designed for the HP compressor stage and for the
direct connection with the HP shaft, in order to obtain also the starter function
removing in this way the dedicated pneumatic system.
The design requirements for the generator, developed by Thales AES, are the ca-
pability to deliver a maximum mechanical torque of 350Nm up to 4000rpm and a
maximum mechanical power of 180kW up to 8800rpm. In the generating mode a
steady state power of 100kW in the speed range 9100-15000rpm is required. Ho-
wever, during the tests of the constructed prototype, considering its high torque in
starting mode, the system can provide a 150kW steady state power. In Fig.2.15
54

2 � More Electric Engine
(a) (b)
Figure 2.15. Picture of the POA programme PM prototype [50].
some pictures of the constructed prototype are shown [50].
The ambient temperature and the air pressure in the selected installation position,
are respectively equal to 330◦C and 5bar. The PM solution, even if characterized by
high temperature sensitivity on the magnets and high short circuit current in case
of failure, has been chosen by the authors for its rotor robustness and its ability to
have a large airgap without oversizing its electromagnetic parts.
In order to avoid the magnets demagnetization at the required high temperature
levels, the rotor is internally cooled by oil circulation. To ensure safety of the ma-
chine when a short circuit current occurs, the windings have been sized to sustain
permanently without overheating a three-phase short circuit current. Moreover, for
the high ambient temperature, the wound stator is isolated by the ambient air by
immersing it in oil and isolated from the airgap by a ceramic sleeve. To satisfy the
reliability requirements imposed by the application, the stator winding is divided
into three sub-machines to ensure a redundancy.
The rotor has 12 poles and an external diameter equal to 265mm. The outermost
diameter of the designed prototype is equal to 440mm. The total weight of the
prototype declared in [50] is 88kg.
In [51] the main characteristics and the initial test results for a 150kW SR pro-
totype developed in the frame of the POA projects are reported. The electrical
generator is designed for the integration in the tail cone zone of the engine, and to
55

2 � More Electric Engine
be connected with the fan shaft (LP shaft). In accordance with the POA programme
requirements, the electrical machine has to generate power over the entire engine
operating speed (150kW, 350V DC, fan shaft speed > 1050rpm) and has to generate
supplementary power on windmilling conditions (25kW, fan shaft speed > 250rpm).
The ambient temperature in the tail cone position can exceed 300◦C in a soak-back
condition after engine shut-down.
The generator is cooled by the engine oil, with a maximum oil inlet temperature ap-
proximately estimated equal to 110◦C. The SR generator is a 4-ph 8/6-pole machine
with a stator outer diameter of 236mm and a stack length of 185mm. The lamina-
tion is made by cobalt-iron in order to maximize the power density of the machine,
and Litz wire is used for stator windings to minimize high frequency losses.
A 1kW PM exciter is �tted on the prototype shaft to provide the initial excitation
of the main SR generator. The PM exciter can also be used to detect rotor position.
A resolver is also �tted for testing. The total declared generator weight is 105kg. In
Fig.2.16(a) and in Fig.2.16(b) the stator and the rotor of the constructed prototype
are respectively shown [51].
In Tab.2.6 the main design parameters of the prototypes described in this section
are summarized.
(a) (b)
Figure 2.16. Picture of the POA programme PM prototype [51].
56

2 � More Electric Engine
Rolls-Royce PM Rolls-Royce SR
Shaft Connection - Position LP shaft - Tailcon HP Shaft - HP Compressor
Machine type Brushless PM SR
Power/Speed250 kW @ 1050 rpm (2274 Nm)
25 kW @ 250 rpm in windmill
192 kW 0-4000 rpm (Mot)
200 kW 4000-13000 rpm (Gen)
DimensionsMax Outer Diameter 554 mm
Axial Active Length 185 mm-
Weight (active materials) 200 kg -
Ambient temperature 100 °C -
Cooling system Air -
Starting torque - -
References [44]-[47] [36]
POA PM POA SR
Shaft Connection - Position HP Shaft - HP Compressor LP Shaft - Tailcone
Machine type Brushless PM SR
Power/Speed
150 kW @ 9000-15000 rpm (Gen)
180 kW up tp 8800 rpm (Mot)
350 Nm up to 4800 rpm (Mot)
150 kW @ 1050 rpm
Dimensions Max Outer Diameter 410 mm Max Outer Diameter 236 mm
Axial Active Length 185 mm
Weight (active materials) 88 kg 105 kg
Ambient temperature 330 °C 140 °C
Cooling system - Oil
Starting torque 350 Nm - 4800 rpm -
References [50] [51]
Table 2.6. Rolls-Royce and POA prototypes main design parameters.
57

2 � More Electric Engine
2.4 Baseline aircraft gas turbine engine for the trade-
o� study: GEnx
For the trade-o� study presented in this dissertation, the baseline engine is the
GEnx produced by General Electric (General Electric next-generation) [52]. It
is an advanced two-shaft, axial �ow, high by-pass turbofan produced by General
Electric (GE) Aviation and other aerospace companies, including Avio.
The GEnx is the latest generation of the GE aircraft long range engine, and its design
is based on the technology experience of the GE90 turbofan, including the latest
generation materials and design process to reduce weight, improve performance,
reduce maintenance, fuel consumption and pollutant emission. The engine carries
composite technology into the fan case, composite fan blades and the smaller core
featured in earlier variants of the engine. The GEnx is designed to move towards the
electric airplane by the elimination of bleed air system using high temperature/high
pressure air from the propulsion engines.
The expected engine thrust is in the range 53000 ÷ 75000lbf (240 ÷ 330kN). The
main characteristics of the di�erent versions are reported in Tab.2.7. The GEnx-1B
is designed for the Boeing 787, meanwhile the GEnx-2B is designed for the Boeing
747-8. Unlike the �rst version for the 787, the GEnx-2B has a traditional bleed air
system to power internal pneumatic and ventilation systems. It also has a smaller
diameter than the initial model to accomodate installation on the B747.
Boeing predicts for the GEnx reduced fuel consumption of 20% and signi�cantly
quieter engines than currents turbofans.
In this thesis the reference baseline aircraft engine taken into account for the trade-
o� study is the GEnx-1B, which is the most closer at the MEA/MEE concept. The
di�erences between the three versions reported in Tab.2.7 are not relevant for the
trade-o� study, because the main dimensions and the the main design characteristics
of the di�erent versions are the same.
In Fig.2.17 the picture of the GEnx-1B and the axial design cross section layout are
reported, putting in evidence its main parts.
58

2 � More Electric Engine
GEnx-1B
(B787-3)
GEnx-1B
(B787-8)
GEnx-1B
(B787-9)
GEnx-2B
(B747-8)
Take-off thrust53200 lbf
(236.60 kN)
63800 lbf
(283.79 kN)
69800 lbf
(310.48 kN)
67000 lbf
(298 kN)
By-pass ratio (take-off) 9.6 9.3 9.1 8.0
Overall pressure ratio (take-off) 35.6 40.7 43.5 44.7
Fan diameter 2.82 m 2.82 m 2.82 m 2.66 m
Bore engine lenght 4.69 m 4.69 m 4.69 m 4.31 m
Stage fan 1 1 1 1
Stage LP compressor 4 4 4 3
Stage LP turbine 7 7 7 6
Stage HP compressor 10 10 10 10
Stage HP turbine 2 2 2 2
Table 2.7. GEnx engines speci�cations [53].
Figure 2.17. GEnx cross section layout.
59

2 � More Electric Engine
2.4.1 GEnx-1B engine reference conditions
In this section the environmental reference conditions (pressure, temperature, speed)
of the front stages (fan, booster and compressor) of the GEnx, chosen has reference
baseline engine for the trade-o� study, are given.
The take-o� is considered the reference conditions for the thermomechanical stresses
of the entire structures (Sea Level Static max thrust, ISA2 Day +15◦C). This con-
dition guarantee the maximum components operative temperatures in combination
with the maximum shafts rotational speeds.
The minimum temperature achievable by the engine o� is −45◦C. The minimum
temperature at which the engine have to be switched on is −31◦C. The reference
conditions for the embedded electrical machine design are:
• round per minutes at maximum speed:
⋄ LP spool: 2581rpm
⋄ HP spool: 12946rpm
• round per minutes at idle speed:
⋄ LP spool: 565rpm
⋄ HP spool: 7957rpm
• ISA Day +15◦C;
• sea Level static maximum thrust;
• engine is thrust rated.
Tab.2.8 reports the reference conditions for the electrical machine design. The refe-
rence parameter of the GEnx-1B (one engine) are:
• total accessories power (except the VFSG generator): ∼ 190kW(max conti-
nuous);
• load spectrum for two generators: Tab.2.9.
60

2 � More Electric Engine
STAGE 1 2 3 4 5 6 7 8 9 10
FAN 122 - - - - - - - - -
LPC 139 159 181 207 - - - - - -
HPC 282 385 524 714 973 1326 1808 2464 3358 4576
STAGE 1 2 3 4 5 6 7 8 9 10
FAN 48 - - - - - - - - -
LPC 62 78 94 110 - - - - - -
HPC 147 188 232 281 334 393 457 527 604 689
TOTAL PRESSURE AT STAGE EXIT - kPa
TOTAL TEMPERATURE AT STAGE EXIT - °C
Table 2.8. GEnx-1B reference conditions. Source: Avio
Occurrences per HOUR of
OPERATION
(non condition specific)
VFSG Max Load
Capability (HP)
(total for both VFCGs)
VFSG Electrical
Loads (kVA)
(total for both VFCGs)
Continuous not applicable 790 500
5 Min 2.0E-05 840 532
1 Sec 0.001 1021 646
5 Sec fault 1E-07 1184 749
Continuous not applicable 692 438
1 Sec 4.17 866 548
5 Sec fault 1E-07 1184 749
Continuous not applicable 600 380
5 Min 1.72E-04 600 380
5 Sec Fault 1E-07 1184 749
CONDITION
IN-FLIGHT:
DUAL
ENGINE
IN-FLIGHT:
SINGLE
ENGINE
GROUND
Table 2.9. GEnx-1B load spectrum for two generators. Source: Avio
Connecting the electrical machine only at the LP shaft, the starting task is precluded
as the typical compression ratio produced by the LP compressor in drag conditions
is not su�cient to generate in the combustion chamber the necessary conditions for
the air-fuel mixture ignition. Therefore the starting task is considered only for the
HP shaft connection [54]. In Fig.2.18 the typical torque, power and speed pro�les
for the HP shaft in the initial starting condition of the GEnx-1B are shown.
2The ISA (International Standard Atmosphere) is an atmospheric model of how the pressure,temperature, density and viscosity of the earth's atmosphere change over a wide range of altitudes.The International Organization for Standardization (ISO) published the ISA as an internationalstandard, ISO 2533:1975.
61

2 � More Electric Engine
Figure 2.18. Torque, power and speed in the starting condition of the GEnx-1B.Source: Avio
In the design of the embedded electrical machine, is mandatory to be competitive
in terms of weight respect to the baseline solutions. The gearbox and generators
weight of the conventional GEnx-1B solution are:
• Gearbox weight: 145kg;
• Generators\Starters weight: 2× 103kg;
Regarding the mechanical aspects, the radial and axial displacements characterizing
the turbofan engine shafts are not of secondary importance for the electrical machine
integration. Indeed, the LP shaft is characterized by displacements in the order of
2mm in the radial direction and of 3mm in the axial direction both in the inner
and outer part of the compressor blades. For the HP shaft both radial and axial
displacements are in the order of 1mm in the inner part of the compressor blades,
and in the order of 2mm in the outer part of the compressor blades.
62

2 � More Electric Engine
2.5 Proposed integration positions
Downstream the analysis of the proposed solutions for MEE application in the tech-
nical literature and the GEnx-1B design con�guration, four di�erent integration
positions in the front part of the engine are taken into account for the trade-o�
study presented in this dissertation.
The integration possibility of a LP shaft-line embedded electrical machine in the rear
part (tailcone) of the engine has been initially evaluated. However, due to the high
environmental temperature and the extensive research activities already conducted
by Rolls-Royce and in the frame of the POA project, in this trade-o� study di�erent
challenging alternatives positions inside the engine have been considered.
In particular two positions foresee the connection with the LP shaft and are placed
in the initial stage of the LP compressor: one in the internal part of the compres-
sor blades and one in the external part of the compressor blades. The other two
considered positions foresee the connection with the HP shaft and are placed in the
initial part of the HP compressor: one in the internal part and one in the external
part of the compressor blades. In particular these four positions are identi�ed in the
following as:
• Position 1: Internal part of the LP compressor (LPCINT);
• Position 2: External part of the LP compressor (LPCEXT);
• Position 3: Internal part of the HP compressor (HPCINT);
• Position 4: External part of the HP compressor (HPCEXT).
In Fig.2.19 a qualitative turbofan picture showing the considered positions is re-
ported. In Fig.2.20 the cross section layout of the GEnx-1B with a more detailed
identi�cation of the four considered integration positions is shown.
An important constraint to be considered for the integration is the actual available
volume into the GEnx-1B to contain the electrical machine. Hereafter, from Pag.65
to Pag.67, the dimensional constraints (diameters, axial length and volumes) and
the main technical speci�cations for the four di�erent considered positions are given.
Fig.2.25 shows the four selected positions in scale between them.
63

2 � More Electric Engine
Figure 2.19. Turbofan engine qualitatively layout showing the four consideredintegration positions.
Figure 2.20. GEnx-1B cross section layout showing the four considered integrationpositions.
2.6 Electrical machines topologies
Considering all the technical aspects discussed in the previous sections, there are
several key requirements to take into account selecting the electrical machine type
for this application. In particular:
• maximum available volumes;
• minimization of the machine weight;
• the machine is subject to di�cult operating environment (speci�cally high
temperature);
• fault tolerant capability;
64

2 � More Electric Engine
Position LPC Internal
Shaft connection LP shaft
Task Generator
Internal minimum diameter (mm) 700 mm
External maximum diameter (mm) 900 mm
Maximum axial lenght (mm) 300 mm
Volume (dm3
) 75 dm3
Speed: minimum-nominal-maximum 600-2400-5000 rpm
Air cooling temperature 100 °C
Figure 2.21. Solution 1: LPCINT.
Position LPC External
Shaft connection LP shaft
Task Generator
Internal minimum diameter (mm) 1400 mm
External maximum diameter (mm) 1500 mm
Maximum axial length (mm) 100 mm
Volume (dm3
) 23 dm3
Speed: minimum-nominal-maximum 600-2400-5000 rpm
Air cooling temperature 50 °C
Figure 2.22. Solution 2: LPCEXT.
65

2 � More Electric Engine
Position HPC Internal
Shaft connection HP shaft
Task Starter/Generator
Internal minimum diameter (mm) 250 mm
External maximum diameter (mm) 450 mm
Maximum axial length (mm) 180 mm
Volume (dm3
) 20 dm3
Speed: minimum-nominal-maximum 7000-13000-18000 rpm
Air cooling temperature 150 °C
Figure 2.23. Solution 3: HPCINT.
Position HPC External
Shaft connection HP shaft
Task Starter/Generator
Internal minimum diameter (mm) 600 mm
External maximum diameter (mm) 700 mm
Maximum axial length (mm) 100 mm
Volume (dm3
) 10 dm3
Speed: minimum-nominal-maximum 7000-13000-18000 rpm
Air cooling temperature 150 °C
Figure 2.24. Solution 4: HPCEXT.
66

2 � More Electric Engine
Solution Available volume (dm3
)
1 - LP compressor internal part (LPCINT) 75
2 - LP compressor external part (LPCEXT) 23
3 - HP compressor internal part (HPCINT) 20
4 - HP compressor external part (HPCEXT) 10
Figure 2.25. Available volumes for the four positions (in scale between them).
• high Mean Time Between Failure (MTBF) due to the limited access for main-
tenance;
• the machine need operate as generator and motor (only as generator in the
LP shaft connection).
In the trade-o� study presented in this dissertation, the Permanent Magnet Syn-
chronous Machines (PMSM) have been considered for a number of advantages which
are relevant to this application:
• reduced rotor losses;
67

2 � More Electric Engine
• high volumetric and gravimetric power density;
• high e�ciency compared to other machine types;
• high pole number design possibility, reducing the end-windings length;
The main drawbacks of the PM machines are related to the magnets presence on
the rotor. Indeed the PMs are characterized by an high temperatures sensitivity,
reducing their magnetic properties with the temperature increasing up to their com-
pletely demagnetization over the Curie temperature. Moreover the PMs produce a
self-excitation all times, making impossible to shut down their magnetic �ux in case
of stator winding short-circuit fault, with a consequent high short-circuit current
circulation. This fault current can be limited designing the machine with an high
synchronous reactance. However it is important to remark that there is a critical li-
mitation concerning the machine synchronous reactance: excessive reactance results
in excessive voltage regulation and therefore limits the maximum output from the
machine.
Even if the described drawbacks are not of secondary importance, the PMSM have
been selected to satisfy the high demanding requirements of the application in terms
of volumes and weight minimizations. The high ambient working temperatures have
been taken into account in the materials selections. The fault current limitation in
case of short-circuit conditions is mainly related to the interfacing electronic con-
verter, which is outside the main topic considered in this thesis.
The fault tolerant capability of the machine is increased employing appropriate
multi-phase Fractional-Slot Concentrated Winding (FSCW) layout isolating ma-
gnetically, thermally and physically the di�erent phases. In this way the potential
for fault propagation between phases is minimized. The FSCW layout has also
the advantage of reducing the length of the end-winding connections, reducing the
machine occupied volume, weight and stator winding Joule losses.
68