
Modelling and Stability Analysis of Power Systems with...
83
Modelling and Stability Analysis of Power Systems with inclusion of Delays Prof. Federico Milano Email: [email protected] Webpage: faraday1.ucd.ie School of Electrical & Electronic Engineering University College Dublin Dublin, Ireland Sevilla, May 16th, 2016 Modelling and Stability Analysis of Power Systems with inclusion of Delays - 1
Transcript of Modelling and Stability Analysis of Power Systems with...

Modelling and Stability Analysis of Power Systems
with inclusion of Delays
Prof. Federico Milano
Email: [email protected]
Webpage: faraday1.ucd.ie
School of Electrical & Electronic Engineering
University College Dublin
Dublin, Ireland
Sevilla, May 16th, 2016 Modelling and Stability Analysis of Power Systems with inclusion of Delays - 1

Biography
• Federico Milano received from the University of Genoa, Italy, the Electrical Engineering
degree and the Ph.D. degree in 1999 and 2003, respectively.
• In 2001 and 2002, he worked at the University of Waterloo, Canada, as a Visiting
Scholar.
• From 2003 to 2013, he was with University of Castilla-La Mancha, Ciudad Real, Spain.
• He joined University College Dublin, Ireland, in 2013, where he is currently Professor
of Power System Control and Protections.
• In 2016, he has been elevated to IEEE Fellow for his contributions to power system
modelling and simulation.
Sevilla, May 16th, 2016 Modelling and Stability Analysis of Power Systems with inclusion of Delays - 2

Contents
• Functional differential equations
• Small-signal stability of standard DAE
• Small-signal stability of delayed DAE
• Numerical Libraries for Eigenvalue Analysis
• How do delays affect system stability?
Sevilla, May 16th, 2016 Modelling and Stability Analysis of Power Systems with inclusion of Delays - 3

Functional Differential Equations
Sevilla, May 16th, 2016 Functional Differential Equations - 1

Differential Algebraic Equations
• The most general form of DAEs is:
Φ(z, z, t) = 0 (1)
where t is the time, z(t) ∈ Rn is the state vector, and z = dz/dt is the state
derivative.
• It is assumed that Φ(z, z, t) is continuously differentiable with respect to all its
arguments.
• The system (1) is sometimes called Implicit Differential Equations (IDEs).
• Clearly, (1) includes Ordinary Differential Equations (ODEs):
Φ(z, z, t) = z − F (z, t) = 0 (2)
Sevilla, May 16th, 2016 Functional Differential Equations - 2

Hessenberg Index-1 Form
• In power system analysis, z are split into state variables x and algebraic variables y
(y = 0) so that (1) can be written explicitly as coupled differential and algebraic
equations.
• In particular, the Hessenberg Index-1 Form is the standard model used for transient
analysis:
x = f(x,y, t) (3)
0 = g(x,y, t)
where x(t) ∈ Rnx and y(t) ∈ R
ny , n = nx + ny , and the Jacobian matrix gy
is
not singular along the solution of (11).
Sevilla, May 16th, 2016 Functional Differential Equations - 3

Hybrid Dynamical System
• The structure of (11) can vary due to discrete events: breaker switching, faults, load
shedding, etc.
• This can be modeled using a set of discrete (e.g., Boolean) variables u(t):
x = f(x,y,u(t)) (4)
0 = g(x,y,u(t))
• Or, more conveniently, as a set of m continuous DAEs in the form of (11), i.e., one
DAE per each period during which u is constant.
Sevilla, May 16th, 2016 Functional Differential Equations - 4
Time Scale
• The DAE system (11) can be defined for any time scale.
• For example, the time scale that concerns transient stability analysis ranges from 0.01
s to 10 s or, which is the same, from 0.1 Hz to 100 Hz.
• Constant inputs represent slow state variables.
• Algebraic variables represent fast state variable (i.e., always in steady-state).
Sevilla, May 16th, 2016 Functional Differential Equations - 5

Time Scales of Relevant Power System Dynamics
Lightning over-voltages
Line switching voltages
Sub-synchronous resonance
Transient stability
Long term dynamics
Tie-line regulation
Daily load following
10−7
10−6
10−5
10−4
10−3
10−2
10−1
100
101
102
103
104
105
1 second1 degree at 50 Hz 1 cycle 1 minute 1 hour 1 dayP
ow
er
syste
mp
he
no
me
na
Time scale [s]
Sevilla, May 16th, 2016 Functional Differential Equations - 6

Time Scales of Relevant Power System Controllers
FACTS control
Generator control
Protections
Prime mover control
ULTC control
Load frequency control
Operator actions
10−7
10−6
10−5
10−4
10−3
10−2
10−1
100
101
102
103
104
105
1 second1 degree at 50 Hz 1 cycle 1 minute 1 hour 1 dayP
ow
er
syste
mco
ntr
ols
Time scale [s]
Sevilla, May 16th, 2016 Functional Differential Equations - 7

Something missing?
• Is the “standard” hybrid dynamical system adequate for modern power systems (e.g.,
smart grids)?
• Some interesting aspects that are not taken into account in (11):
– Stochastic processes
– Signal delays
– Digital (i.e., discrete) signals
– Wider time scale for stability analysis
• The remainder of this presentation will consider some modelling aspects of control
signal delays.
Sevilla, May 16th, 2016 Functional Differential Equations - 8

Functional Differential Algebraic Equations
• Functional DAEs can be written in the form:
Φ(z, z(κ(t)), z, t) = 0 (5)
• Let focus on Hessenberg Index-1 Form FDAEs:
x = f(x,x(κ(t)),y,y(κ(t)), t) (6)
0 = g(x,x(κ(t)),y, t)
• In particular, pure delays are represented by:
κ(t) = t− τ (7)
• The object is to quantitatively define the small signal stability of power systems affected
by functional delays in some measurement signal.
Sevilla, May 16th, 2016 Functional Differential Equations - 9

Small-signal stability of standard DAE
Sevilla, May 16th, 2016 Small-signal stability of standard DAE - 1

First Lyapunov Method (I)
• The first Lyapunov method defines the asymptotical stability in the neighborhood of an
equilibrium point.
• This method is based on the linearization of the ODE.
• Consider a set of nonlinear smooth differential equations:
x = h(x) (8)
where x ∈ Rnx and h : Rnx 7→ R
nx .
• Let x0 an equilibrium (or stationary point), i.e., 0 = h(x0).
• Then, the eigenvalues of the state matrix computed at x0, can define the stability of
the equilibrium point.
Sevilla, May 16th, 2016 Small-signal stability of standard DAE - 2

First Lyapunov Method (II)
• The state matrix is defined as:
Dxh|0 =
[
∂hi
∂xj
]
= hx|0 = As (9)
• The eigenvalues λi of As are the solution of the following characteristic equation:
det(As − λI) = 0 (10)
• The first Lyapunov method states the following:
– If ℜλi < 0 ∀ i = 1, . . . , n, the equilibrium point is asymptotically stable.
– If ℜλi > 0 for some i, the equilibrium point is unstable.
– If ℜλi = 0 for some i, further investigation is needed.
Sevilla, May 16th, 2016 Small-signal stability of standard DAE - 3

DAE - Hessenberg Index-1 Form
• In power system stability analysis, differential-algebraic equation models are used.
• There are two sets of variables: state variables x and algebraic variables y (y = 0).
• In particular, the Hessenberg Index-1 Form is the standard model used for transient
analysis:
x = f(x,y, t) (11)
0 = g(x,y, t)
where x(t) ∈ Rnx and y(t) ∈ R
ny , n = nx + ny , and the Jacobian matrix gy
is
not singular along the solution of (11).
Sevilla, May 16th, 2016 Small-signal stability of standard DAE - 4

Eigenvalue Analysis of DAEs (I)
• Let apply the first Lyapunov method to the standard DAE model.
• A stationary point (x0,y0) satisfies the following conditions:
0 = f(x0,y0) (12)
0 = g(x0,y0)
• The complete Jacobian matrix AC is defined by the linearization of the DAE system
equations at the equilibrium point:
∆x
0
=
fx
fy
gx
gy
∆x
∆y
= AC
∆x
∆y
(13)
Sevilla, May 16th, 2016 Small-signal stability of standard DAE - 5

Eigenvalue Analysis of DAEs (II)
• The state matrix As is a Shur component of matrix AC .
• In fact, As can be obtained by eliminating the algebraic variables from (13):
As = fx− f
yg−1y
gx
(14)
• Note that the equation above implicitly assumes that gy
is not singular (i.e., absence
of singularity-induced bifurcations):
• The singularity of gy
at an equilibrium point is a folding of the manifold of algebraic
variables.
• This is not actually a stability issue, but rather a modelling one. One or more yi must
be redefined as xi.
Sevilla, May 16th, 2016 Small-signal stability of standard DAE - 6
Limitations of First Lyapunov Method
• Equilibria characterized by ℜλi = 0 for some i, can be bifurcation points.
• In practice, there are only two relevant cases:
1. One eigenvalue is λk = 0. This condition often follows the occurrence of a
saddle-node bifurcation.
2. A pair of complex eigenvalues as zero real part, i.e., λh,k = ±jβ (e.g., Hopf
bifurcation).
• Bifurcation points are important because allow defining the stability margin of a current
operating point.
Sevilla, May 16th, 2016 Small-signal stability of standard DAE - 7

Small-signal stability of delayed DAE
Sevilla, May 16th, 2016 Small-signal stability of delayed DAE - 1

Introducing Delays
• Introducing time delays in (11) changes the DAE into a set of delay differential
algebraic equations (DDAE).
• For the sake of simplicity, we only consider ideal constant time delays:
yd = y(t− τ) (15)
where yd is the retarded or delayed variable with respect to some algebraic variable y,
t is the current simulation time, and τ (τ > 0) is the constant delay.
• A similar expression holds for delayed state variables:
xd = x(t− τ) (16)
Sevilla, May 16th, 2016 Small-signal stability of delayed DAE - 2

Delay Differential Algebraic Equations
• Merging together DAE with (15) and (16) leads to:
x = f(x,y,xd,yd, t) (17)
0 = g(x,y,xd,yd, t)
• We consider first the case of a single scalar delay τ .
• Let’s restrict (for now) our analysis to index-1 Hessenberg form:
x = f(x,y,xd,yd, t) (18)
0 = g(x,y,xd, t)
Observe that g does not depend on yd.
Sevilla, May 16th, 2016 Small-signal stability of delayed DAE - 3

Stationary Points of DDAEs (I)
• Assume that a stationary solution of (18) is known and has the form:
0 = f(x0,y0,x0,y0) (19)
0 = g(x0,y0,x0)
• Linearizing (18) at the stationary solution yields:
∆x = fx∆x+ f
xd∆xd + f
y∆y + f
yd∆yd (20)
0 = gx∆x+ g
xd∆xd + g
y∆y (21)
Sevilla, May 16th, 2016 Small-signal stability of delayed DAE - 4

Stationary Points of DDAEs (II)
• Substituting (21) into (20), one obtains:
∆x = A0∆x+A1∆x(t− τ) +A2∆x(t− 2τ) (22)
where:
A0 = fx− f
yg−1y
gx
(23)
A1 = fxd
− fyg−1y
gxd
− fydg−1y
gx
(24)
A2 = −fydg−1y
gxd
(25)
• A0 is the well-known state matrix As that is computed for standard DAE systems.
• A2 = 0 if g do not depend on xd and/or f do not depend on yd.
Sevilla, May 16th, 2016 Small-signal stability of delayed DAE - 5

Characteristic Equation (I)
• The substitution of a sample solution of the form eλtυ, with υ a non-trivial possibly
complex vector of order n, leads to the characteristic equation of (20)-(21):
det ∆(λ) = 0 (26)
where
∆(λ) = λIn −A0 −ν∑
i=1
Aie−λτi (27)
is called the characteristic matrix.
• For simplicity, assume only A1 6= 0, hence (27) becomes:
∆(λ) = λIn −A0 −A1e−λτ
(28)
• Note that the assumption is more restrictive than assuming the general index-1
Hessenberg form.
Sevilla, May 16th, 2016 Small-signal stability of delayed DAE - 6

Roots of the Characteristic Equation
• The solutions of (27) are called the characteristic roots or spectrum, similar to the
finite-dimensional case (i.e., the case for which Ai = 0 ∀i = 1, . . . , ν ).
• However, since (27) is transcendental, it has infinitely many roots, and thus one can
only approximate the solution of (27) computing a reduced set of its roots.
Sevilla, May 16th, 2016 Small-signal stability of delayed DAE - 7

Properties of the Characteristic Equation
• There are two useful properties of the characteristic matrix that allows its exploitation
for stability studies:
1. Equation (27) only has a finite number of characteristic roots in any vertical strip of
the complex plane, given by λ ∈ C : α < ℜ(λ) < β2. There exists a number γ ∈ R such that all characteristic roots of (27) are confined
to the half-plane λ ∈ C : ℜ(λ) < γ.
• These properties imply that the number of solutions in the right-half of the complex
plane is finite and, clearly, if γ ≤ 0, there is no eigenvalue with positive real part.
• Unfortunately, it is impossible to define a precise value for γ!
Sevilla, May 16th, 2016 Small-signal stability of delayed DAE - 8

Solution of the Characteristic Equation
• Since the roots of the characteristic equation are infinite, only approximate solutions
are available.
• There are solutions based on frequency-domain methods that find an approximated
finite set of roots.
• Pade approximants: this approach consists in approximating the delay transfer function
as a rational polynomial.
• Time-domain methods are based on the Lyapunov-Krasovskii’s stability theorem and
the Razumikhin’s theorem (see for example LMI-based methods).
Sevilla, May 16th, 2016 Small-signal stability of delayed DAE - 9

Pade Approximants (I)
• The Pade approximants consist in approximating the delay transfer function as a
rational polynomial (which is based on the Taylor expansion):
e−τs = 1− τs+(τs)2
2!− (τs)3
3!+ . . . (29)
≈ 1 + b1τs+ · · ·+ bm(τs)m
1 + a1τs+ · · ·+ an(τs)n(30)
where, generally n ≥ m.
Sevilla, May 16th, 2016 Small-signal stability of delayed DAE - 10
Pade Approximants (II)
• Relevant cases are:
n = m = 0 ⇒ 1 (31)
n = 1, m = 0 ⇒ 1
1 + τs(32)
n = m = 1 ⇒ 1− τs/2
1 + τs/2(33)
n = 2, m = 1 ⇒ 1− τs/3
1 + 2τs/3 + (τs)2/6(34)
n = m = 2 ⇒ 1− τs/2 + (τs)2/12
1 + τs/2 + (τs)2/12(35)
Sevilla, May 16th, 2016 Small-signal stability of delayed DAE - 11

Pade Approximants (III)
• If n = m, ai and bi coefficients are determined as follows:
a0 = 1 (36)
ai = ai−1n− i+ 1
i(2n− i+ 1)(37)
bi = ai(−1)i (38)
• A typical order used in computer applications is n = m = 6.
Sevilla, May 16th, 2016 Small-signal stability of delayed DAE - 12

Frequency-domain Method (I)
• The idea is to transform the DDAE in a continuous boundary value problem with partial
derivatives (PDE) and then discretize using finite elements (Chebyshev’s discretization
scheme).
• Then, one has to choose the numbers of nodes composing Chebyshev’s discretization
scheme, say N .
• N affects the precision and the computational burden of the method.
Sevilla, May 16th, 2016 Small-signal stability of delayed DAE - 13

Frequency-domain Method (II)
• The resulting matrix of which one has to compute the eigenvalues is of order N × n:
M =
C ⊗ In
A1 0 . . . 0 A0
(39)
where C is obtained eliminating the last n rows from C = −2DN/τ and DN is the
Chebyshev’s differentiation matrix of order N , and ⊗ is the Kronecker product.
• Then, the eigenvalues of M are an approximated spectrum of the original DDAE.
Sevilla, May 16th, 2016 Small-signal stability of delayed DAE - 14
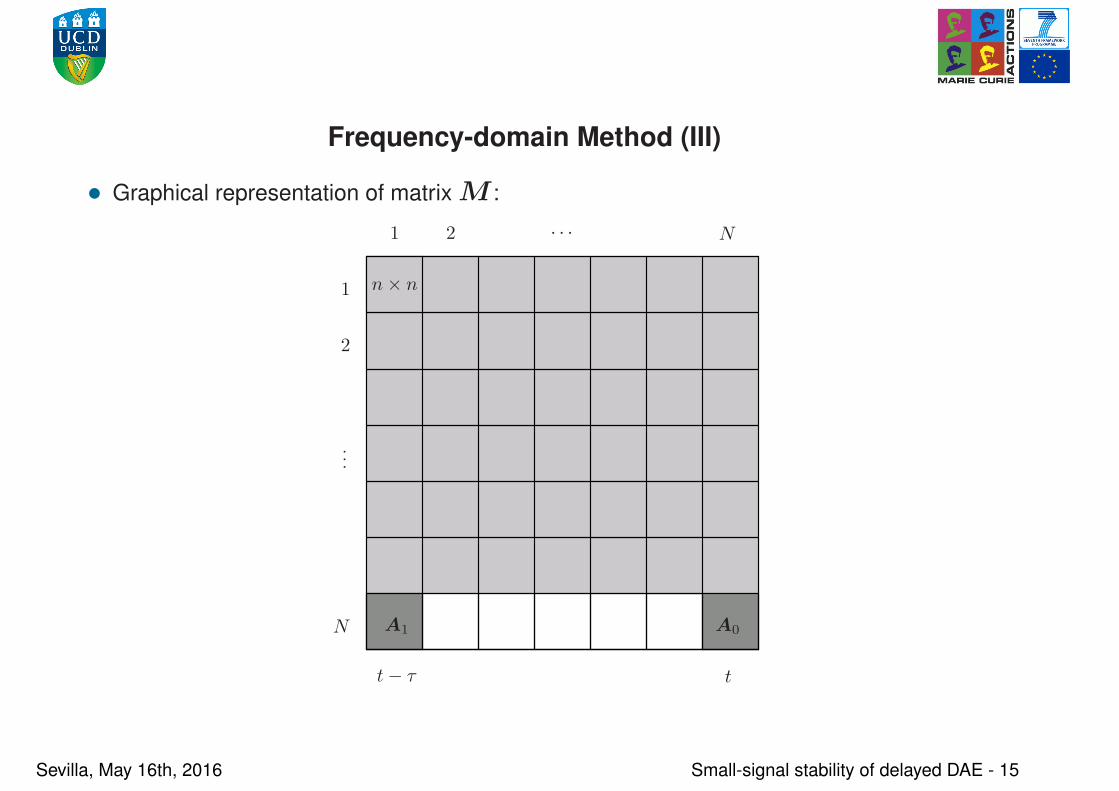
Frequency-domain Method (III)
• Graphical representation of matrix M :
t− τ t
1
1 2
2
N
N
.
.
.
. . .
A0A1
n× n
Sevilla, May 16th, 2016 Small-signal stability of delayed DAE - 15

Removing the Hypothesis on A2
• We can easily take into account the general index-1 Hessenberg form.
• In this case, we have two delays: τ and 2τ .
• If we use odd N , matrix M becomes:
−2τ 0−τ
1
1 2
2
N
N
.
.
.
. . .
A0A1A2
n× n
Sevilla, May 16th, 2016 Small-signal stability of delayed DAE - 16

Multiple Delay Case
• For the multiple delay case, we can adjust the matrices Aν using a linear interpolation
onto the Chebychev’s grid:
−τν 0−τν−1 −τν−2 −τ1−τ2
1
1
2
2
N
N
.
.
.
. . .
Sevilla, May 16th, 2016 Small-signal stability of delayed DAE - 17

Removing the Hypothesis of Index-1 Hessenberg Form – I
• Index-1 Hessenberg form assumes that g do not depend on yd.
• If we remove this hypothesis, equation (22) becomes a summatory on infinite terms:
∆x = A0∆x+
∞∑
k=1
Ak∆x(t− kτ) (40)
Sevilla, May 16th, 2016 Small-signal stability of delayed DAE - 18

Removing the Hypothesis of Index-1 Hessenberg Form – II
• Matrices in (40) are as follows:
A0 =fx+ f
yA , (41)
A1 =fxd
+ fydA+ f
yD , (42)
Ak =ECk−2D, k ≥ 2, (43)
where
A = −g−1y
gx, B = −g−1
ygxd
, (44)
C = −g−1y
gyd
, D = B +CA ,
E = fyC + f
yd.
Sevilla, May 16th, 2016 Small-signal stability of delayed DAE - 19

Convergence of the Series
• The series in (40) converges if and only if ‖C‖ < 1, where ‖ · ‖ induced norm, or,
equivalently, if and only if ρ(C) < 1, where ρ(·) spectral radius of the eigenvalues of
a matrix.
• If ρ(C) < 1, the matrices Ak tend to 0p,p as k → ∞.
• Based on the definition of Ak in (43), the following condition must hold:
ρ(C) = ρ(g−1y
gyd) < 1 . (45)
Sevilla, May 16th, 2016 Small-signal stability of delayed DAE - 20

Other Frequency-Domain Methods
• Discretization of the Time Integration Operator (TIO) as proposed by Bueler et al.
• Linear Multi-Step (LMS) approximation which has been proposed by Engelborghs et al.
and is implemented in the open-source software tool DDE-BIFTOOL
• These methods can account for the multiple-delay case.
Sevilla, May 16th, 2016 Small-signal stability of delayed DAE - 21

Pros and Cons of Available Methods
• Pade approximants can easily take into account several different delays but introduces
phase inaccuracies for high frequencies.
• PDE discretization can have arbitrary precision (as N increases), but is numerically
demanding and gets complicated for the multiple delay case.
• Frequency-domain methods have a limited (or even null) ability to take into account
uncertainties or time dependency of the delays, whereas time-domain methods based
on Lyapunov-Krasovskii’s theorem can do that.
• Time-domain methods based on Lyapunov-Krasovskii’s theorem are limited to the
ability of defining a Lyapunov function, are inconclusive if the stability condition is not
satisfied, and do not allow to define a stability margin.
Sevilla, May 16th, 2016 Small-signal stability of delayed DAE - 22

Numerical Libraries for Eigenvalue Analysis
Sevilla, May 16th, 2016 Numerical Libraries for Eigenvalue Analysis - 1

Algorithms to Compute Eigenvalues
• The problem can be tackled in two ways:
– To find the roots of a polynomial (slow even for small problems!)
– To find all eigenvalues and eigenvectors of the state matrix (e.g., Shur method and
QR decomposition). This is adequate for small to medium size problems.
– To find a subset of eigenvalues, based on some properties (e.g., largest magnitude,
smallest real part, etc.). This is probably the most promising approach for stability
analysis.
Sevilla, May 16th, 2016 Numerical Libraries for Eigenvalue Analysis - 2

Some Libraries
• Full specturm:
– LAPACK: state-of-the-art of the QR factorization and Shur method.
– EISPACK: superseded by LAPACK.
– MAGMA: GPU-based Shur method.
– GSL: Double-shift Francis method
• Partial spectrum:
– ARPACK: it provides the state-of-the art for the Arnoldi iteration. It requires a good
algorithm to factorize the state matrix (e.g., KLU)
– SLEPc: it is based on PETSc and provides several algorithms: Arnoldi iteration,
Krylov-Shur method, Lanczos method, generalized Davidson method.
– HSL: Subspace iteration as well as Arnoldi itearation with Chebychev acceleration.
Sevilla, May 16th, 2016 Numerical Libraries for Eigenvalue Analysis - 3

Z-domain - I
• While the S-domain is widely used in power system analysis, there are alternative
domain that can be used to solve the eigenvalue analysis.
• For example, Z-domain bilinear transformation is as follows:
AZ = (AS + χI)(AS − χInx)−1
(46)
where AS is the original state matrix, I the identity matrix of the same size as AS ,
and χ is a weighting factor that, based on heuristic considerations, can be set to
χ = 8.
Sevilla, May 16th, 2016 Numerical Libraries for Eigenvalue Analysis - 4
Z-domain - II
• The first Lyapunov method applied to the Z-domain, becomes:
– If |λi| < 1 ∀ i = 1, . . . , n, the equilibrium point is asymptotically stable.
– If |λi| > 1 for some i, the equilibrium point is unstable.
– If |λi| = 1 for some i, further investigation is needed.
Sevilla, May 16th, 2016 Numerical Libraries for Eigenvalue Analysis - 5
Z-domain - III
• Computing AZ is more expensive than AS but using AZ can be useful to:
– Better visualize stiff systems, as the eigenvalues falls within or close to the unitary
circle.
– To speed up the determination of the maximum amplitude eigenvalue (e.g., by
means of the Arnoldi iteration), especially in case of unstable equilibrium points with
only few eigenvalues outside the unit circle.
Sevilla, May 16th, 2016 Numerical Libraries for Eigenvalue Analysis - 6
Test Case
• Comparison of different algorithms and libraries to compute the eigenvalues in the
Z-domain for the IEEE 14-bus system with time delays and N = 40.
• The total number of eigenvalues is 1960.
• Iterative methods compute the largest magnitude eigenvalues usin a tolerance of
10−4.
• All simulations are solved on a server equipped with two processors Intel Xeon Quad
Core 3.50 GHz, 12 GB of RAM, 1 GB NVidia Quadro 2000, and mounting a Linux 64
bits operating system.
Sevilla, May 16th, 2016 Numerical Libraries for Eigenvalue Analysis - 7

Complexity of the Eigenvalue Problem
• The complexity of the eigenvalue problem scales to O(m3), where m is the
dimension of the matrix.
• These are some results using LAPACK and a variety of state matrix sizes.
# of Eigs. (m) Chebychev grid (N ) CPU time (s)
49 1 0.009
245 5 0.032
490 10 0.216
2450 50 38.07
4900 100 351.35
Sevilla, May 16th, 2016 Numerical Libraries for Eigenvalue Analysis - 8

Performance of Different Libraries
Library Method # of Eigs. CPU time
LAPACK Shur method All 22.59 s
MAGMA GPU-based Shur method All 14.55 s
GSL Double-shift Francis method All 57.03 s
ARPACK Arnoldi Iter. & LAPACK 50 8.18 s
SLEPC Arnoldi Iter. & Krylov Subspace 79 7 m 38 s
SLEPC Krylov-Shur method 79 8 m 10 s
SLEPC Lanczos method 79 8 m 5 s
SLEPC Generalized Davidson method - not conv.
HSL Subspace Iter. with Chebychev acc. 50 3.56 s
HSL Arnoldi Iter. with Chebychev acc. 50 42.34 s
Sevilla, May 16th, 2016 Numerical Libraries for Eigenvalue Analysis - 9
How do delays affect system stability?
Sevilla, May 16th, 2016 How do delays affect system stability? - 1

Example: IEEE 14-bus System with Delays (I)
• Let consider the IEEE 14-bus system.
• The system is composed of 5 generators with AVR.
• Let assume that the voltage measure of AVRs is affected by a delay τv :
vc = (vT (t− τv)− vc)/Tr (47)
where vc is the AVR measured voltage and vT the generator terminal voltage.
• The dynamic order of the considered system is nx = 49.
Sevilla, May 16th, 2016 How do delays affect system stability? - 2

Example: IEEE 14-bus System with Delays (II)
THREE WINDING
C
C
G
G
C
9
TRANSFORMER EQUIVALENT
8
7
4
9
C
GENERATORS
2
1
5
78
4
1011
14
13
12
6
SYNCHRONOUS
COMPENSATORS
G
3
C
Sevilla, May 16th, 2016 How do delays affect system stability? - 3

Example: IEEE 14-bus System with Delays (II)
• Computational burden of the spectrum analysis for τv = 5 ms and for the IEEE
14-bus system for different values of N .
N N · nx (N · nx)2 NNZ NNZ/(N · nx)
2
1 49 2 401 776 32.3%
5 245 59 049 1 707 2.83%
10 490 240 100 5 186 2.15%
20 980 960 400 19 396 2.02%
40 1 960 3 841 600 77 216 2.01%
Sevilla, May 16th, 2016 How do delays affect system stability? - 4
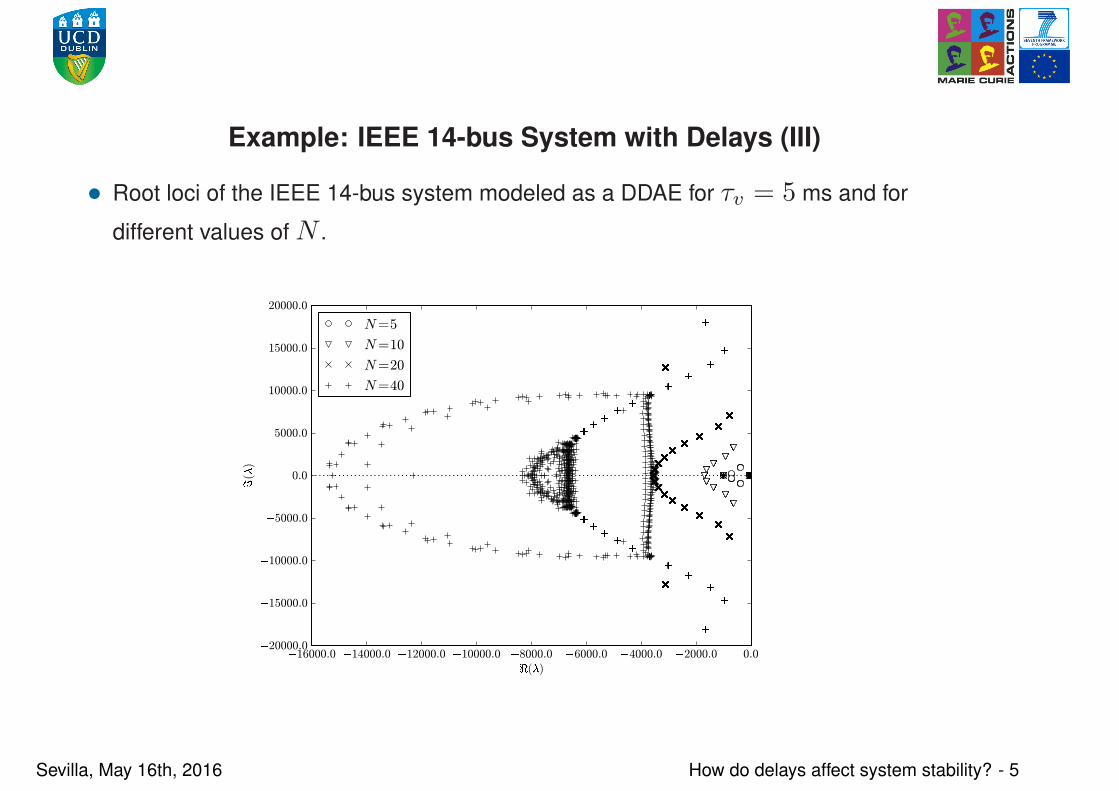
Example: IEEE 14-bus System with Delays (III)
• Root loci of the IEEE 14-bus system modeled as a DDAE for τv = 5 ms and for
different values of N .
16000.0 14000.0 12000.0 10000.0 8000.0 6000.0 4000.0 2000.0 0.0
( )
20000.0
15000.0
10000.0
5000.0
0.0
5000.0
10000.0
15000.0
20000.0
(
)
N=5
N=10
N=20
N=40
Sevilla, May 16th, 2016 How do delays affect system stability? - 5

Example: IEEE 14-bus System with Delays (IV)
• Zoom close to the imaginary axis of the root loci of the IEEE 14-bus system modeled
as a DDAE for τv = 5 ms and for different values of N .
1.4 1.2 1.0 0.8 0.6 0.4 0.2 0.0
( )
10.0
5.0
0.0
5.0
10.0
(
)
N=5
N=10
N=20
N=40
Sevilla, May 16th, 2016 How do delays affect system stability? - 6

Example: IEEE 14-bus System with Delays (V)
• Let now assume that the delay affects the measure of a PSS connected to generator 1.
• PSS may take a remote signal to damp oscillation, thus making possible relatively high
delays (e.g., > 100 ms).
• Generator 1 can be considered an equivalent of an external system with remote PSS
measure.
Sevilla, May 16th, 2016 How do delays affect system stability? - 7

Example: IEEE 14-bus System with Delays (VI)
• Rotor speed ω of machine 5 for the IEEE 14-bus system with a 20% load increase
and for different control models following line 2-4 outage at t = 1 s.
Sevilla, May 16th, 2016 How do delays affect system stability? - 8

Do Delays Always Destabilize the System?
• In spite of the “bad reputation” of delays as a source of destabilization, delays can also
have surprisingly positive effects on improving system stability.
• Let consider the case of a synchronous machine with a PSS.
Sevilla, May 16th, 2016 How do delays affect system stability? - 9

Classical Machine Model (I)
• Consider the well-known simplified electromechanical model of a synchronous
machine in steady state:
2Hω
dt= pm − pe(δ), (48)
• ω is the rotor speed, H is the machine inertia constant, pm is the mechanical power,
and pe is the electromagnetical power defined as:
pe(δ) =e′qv
x′
d
sin(δ − θ), (49)
• δ is the rotor angle, v and θ are the machine bus terminal voltage magnitude and
phase angle, respectively, e′q is the internal fem, and x′
d is the d-axis transient
reactance.
Sevilla, May 16th, 2016 How do delays affect system stability? - 10
Classical Machine Model (II)
• Differentiating (48) leads to:
2H∆ω
dt= −∂pe
∂δ∆δ − ∂pe
∂e′q∆e′q −
∂pe∂v
∆v, (50)
• Without the PSS and assuming a fast integral automatic voltage regulator, e′q and v
are constant, hence:
2Hs∆ω = −∂pe∂δ
∆δ := −K∆δ, (51)
where
K =e′qv
x′
d
cos(δ0 − θ0), (52)
and δ0 and θ0 are the rotor and bus voltage phase angles, respectively, at the
equilibrium point.
Sevilla, May 16th, 2016 How do delays affect system stability? - 11
Classical Machine Model (III)
• Since ∆ω = s∆δ, the characteristic equation of the system is:
f(s) = s2 +K
2H= 0, (53)
which corresponds to an oscillator with roots on the imaginary axis of the complex
plane.
• A PSS control loop leads to a right-hand side term in (53) proportional to e′q ∝ s∆δ.
• Assuming now that the feedback is affected by a delay term τ , then the system
characteristic equation reads
f(s, e−τs) = s2 +Ase−τs + K = 0. (54)
where K = K/(2H), A is proportional to the rotor-speed feedback-controller gain of
the PSS, and τ ≥ 0 is the constant delay.
Sevilla, May 16th, 2016 How do delays affect system stability? - 12

Classical Machine Model (IV)
• Stability map on A-τ plane for K ≈ 2.0. The power system is stable in the shaded
regions.
0.0 2.0 4.0 6.0 8.0 10.0
τ [s]
−2.0
−1.0
0.0
1.0
2.0
A∝
PSScontrollergain
Sevilla, May 16th, 2016 How do delays affect system stability? - 13
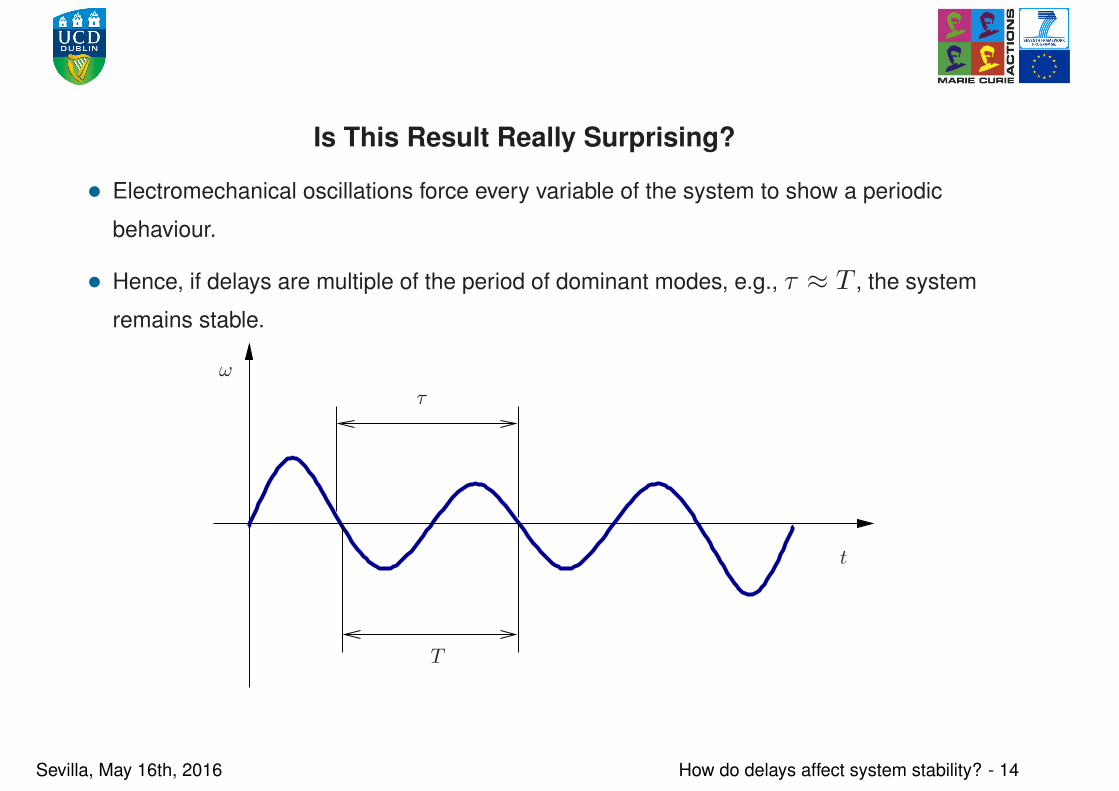
Is This Result Really Surprising?
• Electromechanical oscillations force every variable of the system to show a periodic
behaviour.
• Hence, if delays are multiple of the period of dominant modes, e.g., τ ≈ T , the system
remains stable.
ω
T
τ
t
Sevilla, May 16th, 2016 How do delays affect system stability? - 14

IEEE 14-bus System (revisited)
• Stability map of the Kw-τω plane for the IEEE 14-bus system. Shaded regions are
stable. Dark shaded regions indicate a damping greater than 5%.
0.0 0.1 0.2 0.3 0.4 0.5Delay τω [s]
−5.0
0.0
5.0
10.0
15.0
20.0
PSScontrollergain
Kw
Sevilla, May 16th, 2016 How do delays affect system stability? - 15

Large Power Systems – Multiple-Delay Case – I
• When it comes to compute the eigenvalues, the size does matter.
• We now consider a multi-delay case based on a dynamic model of the all-island Irish
transmission system.
• The model includes 1, 479 buses, 1, 851 transmission lines and transformers, 245
loads, 22 conventional synchronous power plants with AVRs and turbine governors, 6
PSSs and 176 wind power plants.
• For sake of example, constant time-delays are artificially included in most regulators of
the system.
Sevilla, May 16th, 2016 How do delays affect system stability? - 16

All-Island Irish System
TRANSMISSION SYSTEM
400, 275, 220 AND 110kV
JANUARY 2014
HVDC
Sevilla, May 16th, 2016 How do delays affect system stability? - 17

Large Power Systems – Multiple-Delay Case – II
• The system contains 296 delays ranging in the interval (0.005, 11) s.
Device Delayed Signal Delay Range [s]
Primary voltage regulator bus voltage τAVR
(0.005, 0.015)
Power system stabilizer frequency τPSS
(0.05, 0.25)
Reheater of steam turbines steam flow τTG
(3, 11)
Wind turbine freq. reg. frequency τTFR
(0.05, 0.25)
Therm. controlled load frequency τTCL
(0.05, 0.25)
Sevilla, May 16th, 2016 How do delays affect system stability? - 18

Large Power Systems – Multiple-Delay Case – III
• Computational burden of different methods to compute eigenvalues
Model Settings Matrix setup Matrix order LEP sol.
No delays 1.18 s 2, 239 11.91 s
Cheb. discr. N = 7 29.4 s 13, 545 12.69 m
Discr. of TIO N · r = 21 7.07 h 40, 635 50.73 s
LMS approx. h = 0.2 s 7.48 m 32, 895 20.83 s
Pade approx. p = q = 6 2.01 s 3, 415 35.21 s
Pade approx. p = q = 10 2.78 s 4, 399 76.75 s
Sevilla, May 16th, 2016 How do delays affect system stability? - 19

Large Power Systems – Multiple-Delay Case – IV
No delay Chebyshev Discr. Discr. of TIO LMS Approx. Pade Approx. Pade Approx.
N = 7 N · r = 21 h = 0.2 s p = q = 6 p = q = 10
−0.00010 −0.00010 −3.16992 0.91568 −0.00010 14370.508
−0.02500 −0.02500 −3.46994 0.82393 −0.02500 2166.5568
−0.02646 −0.02650 −3.54846 0.58361 −0.02848 1545.1549
−0.03780 ± 0.32935i −0.03780 ± 0.32935i −3.79015 0.36998 −0.03780 ± 0.32935i 1540.3456
−0.05475 −0.05475 −3.79481 0.29701 −0.05475 1445.2436
−0.06615 −0.06100 ± 0.32755i −3.85081 0.10980 −0.06615 1434.9052
−0.08759 ± 0.10409i −0.06615 −3.86392 −0.00327 −0.08759 ± 0.10409i 1019.4456
−0.11681 −0.08759 ± 0.10409i −4.25558 −0.05199 −0.10759 ± 0.33539i 891.50938
−0.12665 ± 0.34150i −0.11445 ± 0.78025i −4.33068 −0.09677 −0.11681 795.91920
−0.13055 ± 0.17132i −0.11681 −4.52052 −0.13551 −0.12906 ± 0.34552i 724.39851
−0.13922 −0.12818 ± 0.34639i −4.68635 −0.15511 −0.13380 ± 0.17103i 648.25856
−0.13950 −0.13455 ± 0.17176i −4.80909 −0.23989 −0.13417 625.18431
−0.13978 −0.17139 −4.84030 −0.32102 −0.17474 ± 0.27121i 593.37327
−0.14008 −0.17358 ± 0.27051i −5.24457 ± 0.35652i −0.34557 −0.17504 587.83144
−0.14027 −0.17504 −5.26514 −0.45854 −0.18411 ± 0.78161i 533.95381
−0.14048 −0.18208 ± 0.81259i −5.67946 ± 0.81568i −0.55539 −0.18562 528.11686
−0.14062 −0.18316 ± 0.81807i −5.74580 −0.67482 −0.18892 519.93536
−0.14081 −0.18562 −5.80760 −0.73128 −0.20000 497.91600
Sevilla, May 16th, 2016 How do delays affect system stability? - 20

Long Transmission Lines – ∞-Delay Case – I
• Long transmission lines are best modelled through a continuum, which leads to the
well-known set of partial differential equations:
∂v(ℓ, t)
∂ℓ= Ri(ℓ, t) + L
∂i(ℓ, t)
∂t(55)
∂i(ℓ, t)
∂ℓ= Gv(ℓ, t) + C
∂v(ℓ, t)
∂t
where R, L, C and G are the resistance, inductance, capacitance and conductance
per unit length, respectively.
• Equations (55) along with the conditions:
v(0, t) = vi(t), v(ℓij , t) = vj(t) (56)
i(0, t) = ii(t), i(ℓij , t) = ij(t) = −ii(t)
where ℓij is the total length of the line, define a boundary value problem.
Sevilla, May 16th, 2016 How do delays affect system stability? - 21

Long Transmission Lines – ∞-Delay Case – II
• Approximations are needed to solve (55).
• Assuming fast balanced time-varying phasors, the boundary value problem becomes:
∂v(ℓ, t)
∂ℓ= Ri(ℓ, t) + L
∂i(ℓ, t)
∂t+ jω0Li(ℓ, t) (57)
∂i(ℓ, t)
∂ℓ= Gv(ℓ, t) + C
∂v(ℓ, t)
∂t+ jω0Cv(ℓ, t)
v(0, t) = vi(t), v(ℓij , t) = vj(t)
i(0, t) = ii(t), i(ℓij , t) = ij(t)
where ω0 is the synchronous pulsation.
Sevilla, May 16th, 2016 How do delays affect system stability? - 22

Long Transmission Lines – ∞-Delay Case – III
• Assuming G ≈ 0, the boundary value problem (57) has an explicit solution [?].
• Let define the following quantities:
– Characteristic admittance Yc =√
C/L.
– Time delay (or travelling time) τij = ℓij√LC , i.e., the time required by a wave to
pass through the line at the wave speed 1/√LC .
– Phase shift βij = ω0τij and attenuation factor αij =Rℓij2 Yc.
Sevilla, May 16th, 2016 How do delays affect system stability? - 23

Long Transmission Lines – ∞-Delay Case – IV
• Then, (57) has the solution:
0 =− ii(t) + ii(t− 2τij)e−2(αij+jβij) − Ycwi(t) (58)
+ 2Ycwj(t− τij)e−(αij+jβij)
− Ycwi(t− 2τij)e−(αij+jβij)
0 =− ij(t) + ij(t− 2τij)e−2(αij+jβij) − Ycwj(t)
+ 2Ycwi(t− τij)e−(αij+jβij)
− Ycwj(t− 2τij)e−2(αij+jβij)
Sevilla, May 16th, 2016 How do delays affect system stability? - 24

Long Transmission Lines – ∞-Delay Case – V
• wi and wj satisfy the following set of complex differential equations:
˙wi − ˙vi = −jω0wi −R
2Lwi + jω0vi (59)
˙wj − ˙vj = −jω0wj −R
2Lwj + jω0vj
• If R ≈ 0 (e.g., loss-less line), equations (58) become:
0 =− ii(t) + ii(t− 2τij)e−j2βij − Ycvi(t) (60)
+ 2Ycvj(t− τij)e−jβij − Ycvi(t− 2τij)e
−j2βij
0 =− ij(t) + ij(t− 2τij)e−j2βij − Ycvj(t)
+ 2Yij vi(t− τij)e−jβij − Ycvj(t− 2τij)e
−j2βij
• Equations (58)-(59) or (60) are a set of functional differential equations with constant
delays.
Sevilla, May 16th, 2016 How do delays affect system stability? - 25

Long Transmission Lines – ∞-Delay Case – VI
• Equations (58)-(59) lead to:
x = f(x,y) (61)
0 = g(x,y,xd,yd).
where delayed quantities are transmission line transient voltages
xd = [wre,d,wim,d], with w = wre + jwim and currents yd = [ire,d, iim,d],
with i = ire + jiim.
• Equations (60) lead to:
x = f(x,y) (62)
0 = g(x,y,yd).
where delayed quantities are only transmission line currents yd = [ire,d, iim,d].
Sevilla, May 16th, 2016 How do delays affect system stability? - 26
Long Transmission Lines – ∞-Delay Case – VII
• From observing (61), we have, for each delay τij :
fx6= 0 , f
xd,ij= 0 , f
y6= 0 , f
yd,ij= 0 ,
gx6= 0 , g
xd,ij6= 0 , g
y6= 0 , g
yd,ij6= 0 .
and, substituting in (43), we obtain:
Ak,ij =fyCk−1
ij Dij , k ≥ 1 , ij ∈ Ωij . (63)
where Ωij is the set of transmission lines.
• Such matrices converge to 0 if and only if ρ(Cij) < 1 for ij ∈ Ωij .
Sevilla, May 16th, 2016 How do delays affect system stability? - 27

Long Transmission Lines – ∞-Delay Case – VIII
• Loss-less line model (62) shows same Jacobian matrices as (61) but for
gxd,ij
= 0q,p, which leads to:
Ak,ij =fyCk
ijAij , k ≥ 1 , ij ∈ Ωij . (64)
Sevilla, May 16th, 2016 How do delays affect system stability? - 28

Long Transmission Lines – ∞-Delay Case – IX
• It is possible to show that the spectral radius of transmission lines modelled with
(58)-(59) satisfy the condition
ρ(Cij) = e−2αij . (65)
• The spectral radius of transmission lines modelled with (60) satisfies the condition
ρ(Cij) = 1.
• The latter can be easily shown by observing that loss-less transmission lines have
R = 0, and, hence, by the definition of the attenuation factor, αij = 0.
Sevilla, May 16th, 2016 How do delays affect system stability? - 29

IEEE 39-bus system – I
• The IEEE 39-bus system is utilized to illustrate the effect of transmission line delays.
• Let’s assume that four lines are long.
• Lengths, attenuation factors and delays of four transmission lines of the New England
39-bus system.
Line i-j ℓij [km] αij [Np] e−αij e−2αij τij [ms]
1-2 276 0.0179 0.9822 0.9648 1.131
23-24 234 0.0152 0.9849 0.9700 0.962
25-26 216 0.0141 0.9860 0.9723 0.887
26-29 418 0.0271 0.9732 0.9472 1.713
Sevilla, May 16th, 2016 How do delays affect system stability? - 30

IEEE 39-bus system – II
• We consider three cases:
• Standard lumped models of transmission lines
• Dynamic delay models of the lines with attenuation, i.e., models (58)-(59), which
lead to the DDAE as in (61);
• Delay loss-less line models (60), which lead to the DDAE as in (62).
• For the DDAEs, we have truncated the series at the first 50 terms and used a
Chebyshev grid with N = 10 nodes.
Sevilla, May 16th, 2016 How do delays affect system stability? - 31
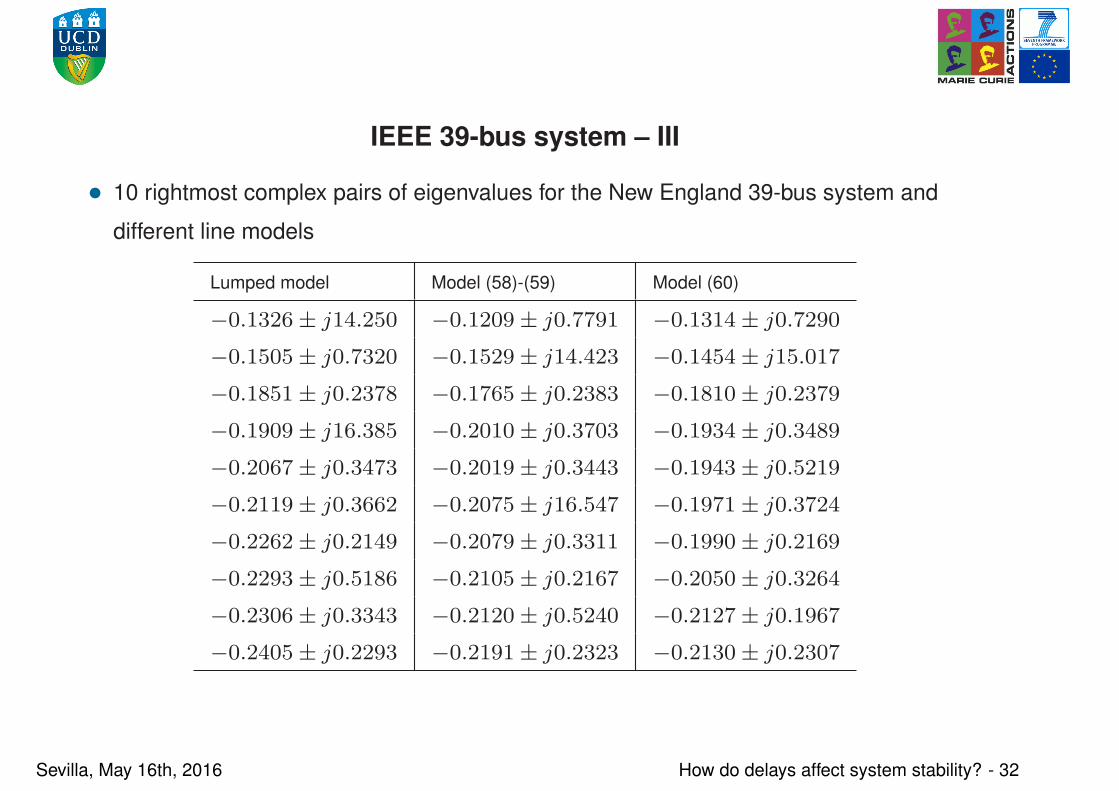
IEEE 39-bus system – III
• 10 rightmost complex pairs of eigenvalues for the New England 39-bus system and
different line models
Lumped model Model (58)-(59) Model (60)
−0.1326± j14.250 −0.1209± j0.7791 −0.1314± j0.7290
−0.1505± j0.7320 −0.1529± j14.423 −0.1454± j15.017
−0.1851± j0.2378 −0.1765± j0.2383 −0.1810± j0.2379
−0.1909± j16.385 −0.2010± j0.3703 −0.1934± j0.3489
−0.2067± j0.3473 −0.2019± j0.3443 −0.1943± j0.5219
−0.2119± j0.3662 −0.2075± j16.547 −0.1971± j0.3724
−0.2262± j0.2149 −0.2079± j0.3311 −0.1990± j0.2169
−0.2293± j0.5186 −0.2105± j0.2167 −0.2050± j0.3264
−0.2306± j0.3343 −0.2120± j0.5240 −0.2127± j0.1967
−0.2405± j0.2293 −0.2191± j0.2323 −0.2130± j0.2307
Sevilla, May 16th, 2016 How do delays affect system stability? - 32
Thanks for your attention!
Sevilla, May 16th, 2016 Thanks! - 1


















