Modeling Route Choice Behavior Using Stochastic Learning Automata
37
Paper No. 01-0372 Duplication for publication or sale is strictly prohibited without prior written permission of the Transportation Research Board Title: Modeling Route Choice Behavior Using Stochastic Learning Automata Authors: Kaan Ozbay, Aleek Datta, Pushkin Kachroo Transportation Research Board 80 th Annual Meeting January 7-11, 2001 Washington, D.C.
Transcript of Modeling Route Choice Behavior Using Stochastic Learning Automata

Paper No. 01-0372
Duplication for publication or sale is strictly prohibited without prior written permission
of the Transportation Research Board
Title: Modeling Route Choice Behavior Using Stochastic Learning Automata
Authors: Kaan Ozbay, Aleek Datta, Pushkin Kachroo
Transportation Research Board 80th Annual Meeting January 7-11, 2001 Washington, D.C.

Ozbay, Datta, Kachroo 1
MODELING ROUTE CHOICE BEHAVIOR USING STOCHASTIC LEARNING AUTOMATA
By
Kaan Ozbay, Assistant Professor Department of Civil & Environmental Engineering
Rutgers, The State University of New Jersey Piscataway, NJ 08854-8014
Aleek Datta, Research Assistant
Department of Civil & Environmental Engineering Rutgers, The State University of New Jersey
Piscataway, NJ 08854-8014
Pushkin Kachroo, Assistant Professor Bradley Department of Electrical & Computer Engineering
Virginia Polytechnic Institute and State University Blacksburg, VA 24061
ABSTRACT
This paper analyzes day-to-day route choice behavior of drivers by introducing a new route choice model developed using stochastic learning automata (SLA) theory. This day-to-day route choice model addresses the learning behavior of travelers based on experienced travel time and day-to-day learning. In order to calibrate the penalties of the model, an Internet based Route Choice Simulator (IRCS) was developed. The IRCS is a traffic simulation model that represents within day and day-to-day fluctuations in traffic and was developed using Java programming. The calibrated SLA model is then applied to a simple transportation network to test if global user equilibrium, instantaneous equilibrium, and driver learning have occurred over a period of time. It is observed that the developed stochastic learning model accurately depicts the day-to-day learning behavior of travelers. Finally, it is shown that the sample network converges to equilibrium, both in terms of global user and instantaneous equilibrium. Key Words: Route Choice Behavior, Travel Simulator, Java
Ozbay, Datta, Kachroo 2
1.0 INTRODUCTION & MOTIVATION
In recent years, engineers have foreseen the use of advanced traveler information systems (ATIS),
specifically route guidance, as a means to reduce traffic congestion. Unfortunately, experimental
data that reflects traveler response to route guidance is not available in abundance. Especially,
effective models of route choice behavior that capture the day-to-day learning behavior of drivers
are needed to estimate traveler response to information, to engineer ATIS systems, and to evaluate
them as well. Extensive data is required for developing the route choice models necessary to
provide understanding of traveler response to traffic conditions. Route guidance by providing
traffic information can be a useful solution only if drivers’ route choice and learning behavior is
well understood.
As a result of these developments and needs in the area of ATIS, several researchers have been
recently working on the development of realistic route choice models with or without a learning
component. Most of the previous work uses the concept of "discrete choice models" for modeling
user choice behavior. The discrete choice modeling approach is a very useful one except for the
fact that it requires accurate and quite large data sets for the estimation and calibration of driver
utility function. Moreover, there is no direct proof that drivers make day-to-day route choice
decisions based on the utility functions. Due to the recognition of these and other difficulties in
developing, calibrating, and subsequently justifying the use of the existing approaches for route
choice, we propose the use of an "artificial intelligence" type of approach, namely stochastic
learning automata (SLA) (Narendra 1988).
The concept of learning automaton grew from a fusion of the work of psychologists in modeling
observed behavior, the efforts of statisticians to model the choice of experiments based on past
observations, and the efforts of system engineers to make random control and optimization
decisions in random environments.
In the case of "route choice behavior modeling", which also occurs in a stochastic environment,
stochastic learning automata mimics the day-to-day learning of drivers by updating the route
choice probabilities based on the basis of information received and the experience of drivers. Of
course the appropriate selection of the proper learning algorithm as well as the parameters it
contains is crucial for its success in modeling user route choice behavior.

Ozbay, Datta, Kachroo 3
This paper attempts to introduce a new route choice model by modeling route choice behavior
using stochastic learning automata theory that is widely used in biological and engineering systems.
This route choice model addresses the learning behavior of travelers based on experienced travel
times (day-to-day learning). In simple terms, the stochastic learning automata approach adopted in
this paper is an inductive inference mechanism which updates the probabilities of its actions
occurring in a stochastic environment in order to improve a certain performance index, i.e. travel
time of users.
2.0 LITERATURE REVIEW
According to the underlying hypothesis of discrete choice models, an individual’s preferences for
each alternative when faced with a set of choices (routes or modes) can be represented by using a
utility measure. This utility measure is assumed to be a function of the attributes of the
alternatives as well as the decision maker’s characteristics. The decision maker is assumed to
choose the alternative with the highest utility. The utility of each alternative to a specific decision
maker can be expressed as a function of observed attributes of the available alternatives and the
relevant observed characteristics of the decision maker (Sheffi, 1985). Now, let a denote the vector
of variables which includes these attributes and characteristics, and let the utility function be
denoted as ( ak V k ) = V k = Utility Function .
The distribution of the utilities is a function of this attribute vector a. Therefore the probability
that alternative k will be chosen, Pk can be related to a using the widely used “multinomial logit”
(MNL) choice model and of the following form (Sheffi, 1985):
P k = e V k
e V l l = 1
Κ ∑
∀ k ∈ Κ (1)
P k = P k ( ak ) = Choice Function
Pk has all the properties of an element of a probability mass function, that is,
0 ≤ P k ( ak ) ≤ 1 ∀ k ∈ Κ
P k ( ak ) = 1 k = 1
Κ ∑
(2)

Ozbay, Datta, Kachroo 4
In a recent paper by Vaughn et al. (1996), a general multinomial choice for route choice under
ATIS is given. The utility function Vk can be expressed in the functional form:
V = f(Individual characteristics, Route specific characteristics, Expectations, Information, Habit
persistence)
The variables in each group are (Vaughn et al., 1996):
• Individual characteristics: gender, age level, and education level.
• Route specific attributes: number of stop locations on route.
• Expectations: expected travel time, standard deviation of the expected travel time, expected
stop time.
• Information: incident information, congestion information, pre-trip information.
• Habit: Habit persistence, or habit strength.
For the base model, a simple utility function of the following form is used:
))ß(E(tt a V ijtijt += i (3)
where,
Vijt = expected utility of route j on day t for individual i
E(ttijt) = expected travel time on route j on day t for individual i
α j = route specific constant
Several computer-based experiments have recently been conducted to produce route choice models.
Iida, Akiyama, and Uchida (1992) developed a route choice model based on actual and predicted
travel times of drivers. Their model of route choice behavior is based upon a driver’s traveling
experience. During the course of the experiment, each driver was asked to predict travel times for
the route to be taken (1 O-D pair only), and after the route was traveled, the actual travel time was
displayed. Based on this knowledge, the driver was asked to repeat this procedure for several
iterations. However, the travel time on the alternative route was not given to the driver, and the
driver was not allowed to keep records of past travel times. In a second experiment, the driver was
asked to perform the same tasks, but was allowed to keep records of the travel times. Two models
were developed, one for each experiment. The actual and predicted travel times for route r for the
i-th participant and the n-th iteration are defined as nrit , n
rit̂ , respectively, and the predicted travel
time on the route r for the n + 1-th iteration, 1+nrit , is corrected based on the n-th iterations actual

Ozbay, Datta, Kachroo 5
travel time and its deviation from the predicted travel time for that iteration. The travel time
prediction model for the second case is as follows:
3 31201 xxxy βββα +++= (4)
where, nri
nri
knri
knrik ttyttx ˆ , - ˆ 1 −== +−− (5)
The parameters β1, β2, and β3 are regression coefficients. X is the difference between the actual
and predicted travel times of the i-th participant for the n-th iteration, and y represents the
adjusting factor for the n+1-th iteration’s predicted travel time from the n-th iteration’s actual
travel time.
Another route choice model developed by Nakayama and Kitamura (1999) assumes that drivers
“reason and learn inductively based on cognitive psychology”. The model system is a compilation
of “if-then” statements in which the rules governing the statements are systematically updated
using algorithms. In essence, the model system represents route choice by a set of rules similar to
a production system. The rules for the system represent various cognitive processes. If more than
one “if-then” rule applies to a given situation, then the rule that has provided the best directions in
the past holds true. The “strength indicator” of each rule is a weighted average of experienced
travel times.
Mahmassani and Chang developed a framework to describe the processes governing commuter’s
daily departure time decisions in response to experienced travel times and congestion. It was
determined that commuter behavior can be viewed as a “boundedly-rational” search for an
accepted travel time. Results indicated that a time frame of tolerable schedule delay existed,
termed an “indifference band”. This band varied among individuals, and was also effected by the
user’s experience with the network.
Jha et. al developed a Bayesian updating model to simulate how travelers update their perceived
day-to-day travel time based on information provided by ATIS systems and their previous
experience. The framework explicitly modeled the availability and quality of traffic information.
They used a disutility function to model driver’s perceived travel time and schedule delay in order
to evaluate alternative travel choices. Eventually, the driver chooses an alternative based on utility
maximization principle. Finally, the both models are incorporated into a traffic simulator.

Ozbay, Datta, Kachroo 6
2.1 LEARNING MECHANISMS IN ROUTE CHOICE MODELING
Generally users cannot foresee the actual travel cost that they will experience during their trip.
However, they do anticipate the cost of their travel based on the costs experienced during their
previous trips of similar characteristics. Hence, learning and forecasting processes for route choice
can be modeled through the use of statistical models applied to path costs experienced on previous
trips. There are different kinds of statistical learning models proposed in Cascetta and Canteralla
(1993) or Davis and Nihan (1993). There are also other learning and forecasting filters that are
empirically calibrated (Mahmassani and Chang, 1985). Most of the previous route choice models
in the literature model the learning and forecasting process using one of the two general approaches
briefly described below (Cascetta and Canteralla, 1995):
• Deterministic or stochastic threshold models based on the difference between the forecasted
and actual cost of the alternative chosen the previous day for switching choice probabilities
(Mahmassani and Chang, 1985).
• Extra utility models for conditional path choice models where the path chosen the previous day
is given an extra utility in order to reflect the transition cost to a different alternative (Cascetta
and Cantarella, 1993).
• Stochastic models that update the probability of choosing a route based on previous
experiences according to a specific rule, such as Bayes’ Rule. Stochastic learning is also the
learning mechanism adopted in this paper with the exception that the SLA learning rule is a
general one and different from Bayes’ rule.
3.0 LEARNING AUTOMATA
Classical control theory requires a fair amount of knowledge of the system to be controlled. The
mathematical model is often assumed to be exact, and the inputs are deterministic functions of
time. Modern control theory, on the other hand, explicitly considers the uncertainties present in the
system, but stochastic control methods assume that the characteristics of the uncertainties are
known. However, all those assumptions concerning uncertainties and/or input functions may not
be valid or accurate. It is therefore necessary to obtain further knowledge of the system by
observing it during operation, since a priori assumptions may not be sufficient.
It is possible to view the problem of route choice as a problem in learning. Learning is defined as a
change in behavior as a result of past experience. A learning system should therefore have the

Ozbay, Datta, Kachroo 7
ability to improve its behavior with time. “In a purely mathematical context, the goal of a learning
system is the optimization of a functional not known explicitly”.
The stochastic automaton attempts a solution of the problem without any a priori information on
the optimal action. One action is selected at random, the response from the environment is
observed, action probabilities are updated based on that response, and the procedure is repeated. A
stochastic automaton acting as described to improve its performance is called a learning
automaton (LA). This approach does not require the explicit development of a utility function
since the behavior of drivers in our case is implicitly embedded in the parameters of the learning
algorithm itself.
The first learning automata models were developed in mathematical psychology. Bush and
Mosteller, 1958, and Atkinson et al., 1965, survey early research in this area. Tsetlin (1973)
introduced deterministic automata operating in random environments as a model of learning. Fu
and colleagues were the first researchers to introduce stochastic automata into the control literature
(Fu, 1967). Recent applications of learning automata to real life problems include control of
absorption columns (Fu, 1967) and bioreactors (Gilbert et al., 1993). Theoretical results on
learning algorithms and techniques can be found in recent IEEE transactions (Najaraman et al.,
1996, Najim et al., 1994) and in Najim-Poznyak collaboration (Najim et al., 1994).
3.1 LEARNING PARADIGM
The automaton can perform a finite number of actions in a random environment. When a specific
action α is performed, the environment responds by producing an environment output β, which is
stochastically related to the action (Figure 1). This response may be favorable or unfavorable (or
may define the degree of “acceptability” for the action). The aim is to design an automaton that
can determine the best action guided by past actions and responses. An important point is that
knowledge of the nature of the environment is minimal. The environment may be time varying, the
automaton may be a part of a hierarchical decision structure but unaware of its role, or the
stochastic characteristics of the output of the environment may be caused by the actions of other
agents unknown to the automaton.

Ozbay, Datta, Kachroo 8
Response
Action α
β
Automaton
Environment
probabilitiesprobabilitiesPenaltyAction
P C
Figure 1. The automaton and the environment
The input action α(n) is applied to the environment at time n. The output β(n) of the environment is
an element of the set β=[0,1] in our application. There are several models defined by the output set
of the environment. Models in which the output can take only one of two values, 0 or 1, are
referred to as P-models. The output value of 1 corresponds to an “unfavorable” (failure, penalty)
response, while output of 0 means the action is “favorable.” When the output of the environment is
a continuous random variable with possible values in an interval [a, b], the model is named S-
model.
The environment where the automaton “lives,” is defined by a triplet {α,c,β} where α is the action
set, β represents a (binary) output set, and c is a set of penalty probabilities (or probabilities of
receiving a penalty from the environment for an action) where each element ci corresponds to one
action αi of the action set α. The response of the environment is considered to be a random
variable. If the probability of receiving a penalty for a given action is constant, the environment is
called a stationary environment; otherwise, it is non-stationary. The need for learning and
adaptation in systems is mainly due to the fact that the environment changes with time.
Performance improvement can only be a result of a learning scheme that has sufficient flexibility to
track the better actions. The aim in these cases is not to evolve to a single action that is optimal,
but to choose actions that minimize the expected penalty. For our application, the (automata)
environment is non-stationary since the physical environment changes as a result of actions taken.
The main concept behind the learning automaton model is the concept of a probability vector
defined (for P-model environment) as
p(n) = {pi (n) ∈{0,1} pi(n) = Pr[α(n) = α i]}

Ozbay, Datta, Kachroo 9
where αi is one of the possible actions. We consider a stochastic system in which the action
probabilities are updated at every stage n using a reinforcement scheme. The updating of the
probability vector with this reinforcement scheme provides the learning behavior of the automata.
3.2 REINFORCEMENT SCHEMES
A learning automaton generates a sequence of actions on the basis of its interaction with the
environment. If the automaton is “learning” in the process, its performance must be superior to an
automaton for which the action probabilities are equal. “The quantitative basis for assessing the
learning behavior is quite complex, even in the simplest P-model and stationary random
environments (Narendra et al., 1989)”. Based on the average penalty to the automaton, several
definitions of behavior, such as expediency, optimality, and absolute expediency, are given in the
literature. Reinforcement schemes are categorized based on the behavior type they provide, and the
linearity of the reinforcement algorithm. Thus, a reinforcement scheme can be represented as:
p(n + 1) = T[p(n),α(n),β(n)], where T is a mapping, α is the action, and β is the input from the
environment. If p(n+1) is a linear function of p(n), the reinforcement scheme is said to be linear;
otherwise it is termed nonlinear. Early studies of reinforcement schemes were centered on linear
schemes for reasons of analytical simplicity. In spite of the efforts of many researchers, a general
algorithm that ensures optimality has not been found (Kushner et al., 1979). Optimality implies
that action αm associated with the minimum penalty probability cm is chosen asymptotically with
probability one. Since, it is not possible to achieve optimality in every given situation, a sub
optimal behavior is defined, where the asymptotic behavior of the automata is sufficiently close to
optimal case.
A few attempts were made to study nonlinear schemes (Chandraeskharan et al.1968, Baba, 1984).
Generalization of such schemes to the action case was not straightforward. Later, researchers
started looking for the conditions on the updating functions that ensure a desired behavior. This
approach led to the concept of absolute expediency. An automaton is said to be absolutely
expedient if the expected value of the average penalty at one iteration step is less than the previous
step for all steps. Absolutely expedient learning schemes are presently the only class of schemes
for which necessary and sufficient conditions of design are available (Chandraeskharan et al.1968,
Baba,1984).

Ozbay, Datta, Kachroo 10
3.3 AUTOMATA AND ENVIRONMENT
The learning automaton may also send its action to multiple environments at the same time. In that
case, the actions of an automaton result in a vector of feedback values from the environment.
Then, the automaton has to “find” an optimal action that “satisfies” all the environments (in other
words, all the “teachers”). In a multi-teacher environment, the automaton is connected to N
separate teachers. The action set of the automaton is of course the same for all
teacher/environments. Baba (1984) discussed the problem of a variable-structure automaton
operating in many-teacher (stationary and non-stationary) environments. Conditions for absolute
expediency are given in his work.
4.0 STOCHASTIC LEARNING AUTOMATA (SLA) BASED ROUTE CHOICE
(RC) MODEL - SLA-RC MODEL
Some of the major advantages of using stochastic learning automata for modeling user choice
behavior can be summarized as follows:
1. Unlike existing route choice models that capture learning process as a deterministic
combination of previous days’ and the current day’s experience, SLA-RC model captures the
learning process as a stochastic one.
2. The general utility function, V(), used by the existing route choice models is a linear
combination of explanatory variables. However, stochastic learning automata can easily
capture non-linear combinations of these explanatory variables (Narendra and Thathnachar,
1989). This presents an important improvement over existing route choice models since in
reality route choice cannot be expected to be a linear combination of the explanatory variables.
4.1 DESCRIPTION OF THE STOCHASTIC LEARNING AUTOMATA ROUTE
CHOICE (SLA-RC) MODEL
This model consists of two components. These are:
• Choice Set: Two types of choice sets can be defined. The first type will be comprised of
complete routes between each origin and destination. The user will choose one of these routes
every day. This is similar to the pre-trip route choice mechanism. The second type can be
comprised of decision points in such a way that the user will choose partial routes to his/her

Ozbay, Datta, Kachroo 11
destination at each of these decision points. This option is similar to the “en-route” decision-
making mechanism.
• Learning Mechanism: The learning process will be modeled using stochastic learning
automata that is described in detail in this section.
Let’s assume that there exists an input set X that is comprised of explanatory variables described
in Vaughn et al. (1996). Thus X={x1,1, x1,2 … . xt,i} where “t” is the day and “i“ is the individual
user or user class. Let’s also assume that there exists an output set D which is comprised of the
decisions of route choices, such that D={d1, d2,.......dj}, where j is the number of acceptable routes.
This simple system is shown in Figure 2. This system can be made into a feedback system where
the effect of user choice on the traffic and vice versa is modeled. This proposed feedback system is
shown in figure 3.
O D
Figure 2. One Origin - One Destination Multiple Route System
Route Choice Probabilities
Traffic Network
Updated Travel Times
Figure 3. Feedback mechanism for the SLA-RCM.
For a very simple case with only two routes between an origin and destination and one user class
exist, the above system can be seen as a double action system. Then, to update the route choice
probability, we can use linear reward-penalty learning scheme proposed in Narendra and
Thathnachar (1989). This stochastic automata based learning scheme is selected due to its
applicability to the modeling of human learning mechanism in the context of route choice process.

Ozbay, Datta, Kachroo 12
4.1.1 LINEAR REWARD-PENALTY (LR -P ) SCHEME
This learning scheme was first used in mathematical psychology. The idea behind a reinforcement
scheme, such as linear reward-penalty (LR -P ) scheme, is a simple one. If the automaton picks an
action α i at instant n and a favorable input β(n) = 0( ) results, the action probability pi(n) is
increased and all other components of p(n) are decreased. For an unfavorable input β(n) = 1,
pi(n) is increased and all other components of p(n) are decreased.
In order to apply this idea to our situation, assume that there are r distinct routes to choose
between an origin-destination pair, as seen in Figure 2. Therefore, we can consider this system as
a variable-structure automaton with r actions to operate in a stationary environment. A general
scheme for updating action probabilities can be represented as follows:
If
α ( n ) = α i ( i = 1 , ..... r )
p j ( n + 1 ) = p j ( n ) − g j [ p ( n )] when β ( n ) = 0
p j ( n + 1 ) = p j ( n ) + h j [ p ( n )] when β ( n ) = 1
for all j ≠ i
(6)
To preserve the probability measure we have p j(n)j =1
r
∑ = 1 so that
pi(n + 1) = pi(n) + g j(p(n))j=1j≠ i
r
∑ when β(n) = 0
pi(n + 1) = pi(n) − h j(p(n))j=1j≠ i
r
∑ when β(n) = 1
(7)
The updating scheme is given at every instant separately for that action which is attempted at stage
n in equation (7) and separately for actions that are not attempted in equation (6). Reasons behind
this specific updating scheme are explained in Narendara and Thathnachar (1989). In the above
equations, the action probability at stage (n + 1) is updated on the basis of its previous value, the
action α(n) at the instant n and the input β(n) . In this scheme, p(n+1) is a linear function of
p(n), and thus, the reinforcement (learning) scheme is said to be linear. If we assume a simple
network with one origin destination pair and two routes between this O-D pair, we can consider a
learning automaton with two actions in the following form:

Ozbay, Datta, Kachroo 13
g j (p(n)) = ap j(n)
andh j(p(n)) = b(1 − p j (n))
(8)
In equation (8) a and b are reward and penalty parameters and 0 < a <1, 0 < b < 1 . If we
substitute (8) in equations (6) and (7), the updating (learning) algorithm for this simple two route
system can be re-written as follows:
p1 (n + 1) = p1(n) + a(1 − p1(n))p2 (n + 1) = (1 − a)p2 (n)
α(n) = α1,β(n) = 0
p1 (n + 1) = (1 − b)p1(n) p2 (n + 1) = p2 (n) + b(1 − p2(n))
α(n) = α1,β(n) = 1
(9)
Equation (9) is in general referred as the general LR -P updating algorithm. From these equations, it
follows that if action α i is attempted at stage n, the probability 1j (n)p ≠j is decreased at stage n+1
by an amount proportional to its value at stage n for a favorable response and increased by an
amount proportional to 1 − p j(n)[ ] for an unfavorable response.
If we think in terms of route choice decisions, if at day n+1, the travel time on route 1 is less than
the travel time on route 2, then we consider this as a favorable response and the algorithm increases
the probability of choosing route 1 and decreases the probability of choosing route 2. However, if
the travel time on route 1 at day n+1 is higher than the travel time on route 2 the same day, then the
algorithm decreases the probability of choosing route 1 and increases the probability of choosing
route 2. In this paper, we do not address “departure time choice” decisions. It is assumed that
each person departs during the same time interval ∆t. It is also assumed that, for this example,
there is one class of user.
5.0. DYNAMIC TRAFFIC / ROUTE CHOICE SIMULATOR
The Internet based Route Choice Simulator (IRCS), shown in Figure 4, is the travel simulator
developed for this project and was based on one O-D pair and two routes. The simulator is a Java
applet designed to acquire data for creating a learning automata model for route choice behavior.
The applet can be accessed from any Java-enabled browser over the Internet. Several advantages
exist in using web-based travel simulators. First, these simulators are easy to access by different

Ozbay, Datta, Kachroo 14
types of subjects. Geographic location does not prevent test subjects from participating in the
experiments. Second, Internet based simulators permit the possibility of having a large number of
subjects partake in the experiment. Internet-based simulators are designed to have a user-friendly
GUI, and reduce confusion amongst subjects. Also, Java-based simulators are not limited by
hardware, such as the computer type, i.e. Mac, PC, UNIX. Any computer using a Java-enabled
web browser can use these simulators. Finally, data processing and manipulation capabilities are
significantly increased when using web-based simulators due to the very effective and on-line
database tools established for Internet applications.
The site hosting this travel simulator consists of an introductory web page that gives a brief
description of the project, and directions on how to properly use the simulator. Following a link on
that page brings the viewer to the applet itself. The applet is intended to simulate route choice
between two alternative routes. Travel time on route i is the result of a random number picked
from a normal distribution with a mean and standard deviation of (µ, σ) and the sum of a nominal
average value for travel time on that route as seen in Equation 10.
Travel_ Time(i) = Fixed_ Travel_ Time + Random_Value(µ,σ) (10)
Users conducting the experiment are asked to make route choice decision on a day-to-day basis.
The simulator shows the user the experienced route travel time for each day. Another method for
determine travel times is by incorporating the effect of choosing the specific route in terms of extra
volume. In this case, travel time is determined as seen in Equation 11.
Travel _ Time ( i ) = f(volume) (11)
The applet can be divided into two sections. The first section is the GUI and the algorithms for
determining travel time on each route. Before beginning the experiment, the participant is asked to
enter personal and socio-economic data such as name, age, gender, occupation, and income, and
user-status. This data will be used in the future to create driver classes and to compare the route
choice behavior and learning curves for various classes. Also included in the data survey section
are choices for purpose of trip, departure time, desired arrival time, and actual arrival time. For
example, if the participant assumed that this experiment simulated a commute from home to work,

Ozbay, Datta, Kachroo 15
then the participant would realize the importance of arriving at the destination as quickly as
possible. Also, the participant could determine how accurate his or her desired arrival time is
compared to the actual arrival time.
Figure 4. GUI of Internet Based Route Choice Simulator (IRCS)
The graphics presently incorporated in the applet are GIS maps of New Jersey. These maps can be
changed to any image to portray any origin-destination pair. Route choices can be made by
clicking on either button on the left panel of the applet. The purpose of having two image panels is
two-fold. First, the larger panel on the left can hold a large map of any size, and the map can still
remain legible to the viewer. The image panel on the upper right side is intended to zoom in on the
particular link chosen by the user on the right panel. For this experiment, such detail is not
necessary. However, for future experiments, involving several O-D pairs, this additional capability

Ozbay, Datta, Kachroo 16
will be beneficial to the applet user. Secondly, the upper right panel contains the participant’s
route choice on a particular day, and the corresponding travel time.
The second part of the applet consists of its connection to a database. The applet is connected to
an MS Access database using JDBC. The Access database contains a database field for each field
in the applet. The database stores all of the information given by the participant, including route
choice/travel time combinations on each day. After the participant finishes the experiment, he or
she is asked to click the “Save” button in order to permanently save the data to the database.
Another important feature of the applet is the ability to query the database from the Internet. In
order to query the database, the user simply has to type in the word to be searched in the
appropriate text field. Then, the applet generates the SQL query, passes the query to the database,
and returns any results. This feature is particularly useful to the designer when searching for
particular patterns, values, or participants.
A brief description of the test subjects used in this study is warranted at this point. 66% of the
participants are college students, either graduate or undergraduate, while the remaining were
professionals in various fields. The participants ranged from the ages of 19 to 26. All came from
similar socio-economic backgrounds, and are familiar with the challenges drivers face, specifically
route choice. How do we address the issue of similar socio-economic backgrounds? 34% of the
participants were female. Finally, all of the participants attempted to determine the shortest route,
as can be seen by their comments in the last field, and upon further examination, were all
successful. Work is underway to increase the pool of test subjects as well as the capabilities of the
travel simulator.
6.0 EXPERIMENTAL RESULTS
Several experiments were conducted using the IRCS presented. Normal distribution was used to
generate the travel time values for each route. The distribution for the first route had a mean of 45
minutes, and a standard deviation of 10 minutes, whereas the second distribution had a mean of 55
minutes, and a standard deviation of 10 minutes. As can be seen in Figure 4, the given route
choices are Route 70 and Route 72 in this experiment, and they are considered to be Route 1 and
Route 2 respectively.

Ozbay, Datta, Kachroo 17
The probability of choosing Route 1 at trial i, Pr_Route_1(i), and the probability of choosing
Route 2 at trial i, Pr_Route_2(i), are calculated using the following equations:
Pr _ Route_1 ( i ) =
choice i − 2 + choice i − 1 + choice i + choice i + 1 + choice i + 2 5
(12)
Pr _ Route_2 ( i ) =
choice i − 2 + choice i − 1 + choice i + choice i + 1 + choice i + 2 5
(13)
The probabilities of each trial are then plotted for each experiment. Figures 5 and 6 show the plots
for Experiment 2 and 5 respectively. As can be seen, all plots show a convergence to the shortest
route despite the random travel times for each route. After several trials, the probability of using
the route with the shorter average travel time increases.
For each experiment, the respective participant was able to determine the shortest route by at least
day 15. Indeed, based on the participant’s comments obtained at the end of the experiment, each
participant had correctly chosen the shorter route. If the participant had continued the experiment,
the probability of using the shorter route would have converged to one. These results show that the
learning process is indeed an iterative stochastic process which can be modeled by iterative
updating of the route choice probabilities using a reward-penalty scheme as proposed by our SLA-
RC model presented in section 4.1.1.
Probability of Choosing Route 1 - Experiment #2
0
0.2
0.4
0.6
0.8
1
0 5 10 15 20 25
Day
Prob
abili
ty
Figure 5. Route Choice Probability Based on Time (Subject #2)

Ozbay, Datta, Kachroo 18
Probability of Choosing Route 2 - Experiment #5
0
0.2
0.4
0.6
0.8
1
0 5 10 15 20 25
Day
Prob
abili
ty
Figure 6. Route Choice Probability Based on Time (Subject #5)
6.1 SLA-RC MODEL CALIBRATION
The SLA-RC model described in section 4.1.1 by equation (8) has two parameters namely, a and
b , that need to be calibrated. According to the Linear Reward-Penalty (LR -P ) scheme, when an
action is rewarded, the probability of choosing the same route at trial (n + 1) is increased by an
amount equal to aP1(n) and when an action is penalized the probability of choosing same route at
trial (n + 1) is decreased by an amount equal to bP1 (n) . Therefore, our task is to determine these
a and b parameters. To achieve this goal, the data set for each experiment is divided into two
sub-sets namely, reward and penalty subsets, and a and b parameters are estimated. First,
however, a brief explanation of the effects of these parameters on the rate of learning is warranted.
The a parameter represents the reward given when the correct action is chosen. In other words, a
increases the probability of choosing the same route in the next trial. The effects of this parameter
can be seen in Figure 7. As seen in the graph, as a increases, the probability of choosing the
correct route also increases. In essence, the rate of learning increases. If a large a value is
assigned, then the learning rate will be skewed, and the model will be biased. Parameter b
represents the penalty given when the incorrect route is chosen. This parameter will decrease the
probability that the incorrect route will be chosen. However, since b is much smaller in relation to
a, the effect of a on the learning rate is much greater than that of b.

Ozbay, Datta, Kachroo 19
Effect of Parameter "a" on Learning Curve for Ideal Learning
00.10.20.30.40.50.60.70.80.9
0 5 10 15 20 25
Day
Prob
abili
ty o
f Cho
osin
g C
orre
ct
Rou
tea = 0.02a = 0.03a = 0.04a = 0.05
Figure 7. Effect of Parameter “a” on Learning Curve
As stated previously, the parameters a and b were determined by dividing the data set into two
subsets, reward and penalty subsets. Since the travel time for both routes is collected, one can
determine the shorter route. If the subject chose the shorter route, then the action is considered
favorable, and that trial will be placed in the reward subset. If the subject chose the incorrect
route, then that action is considered unfavorable, and that trial will be placed in the penalty subset.
Next, the participant’s actual probability distribution is determined. Two subsets are again created
for Route 1 and Route 2. For each trial the participant chose Route 1, a binary value of 1 was
assigned to the Route 1 subset and a value of 0 was assigned to the Route 2 subset. For each trial
the participant chose Route 2, a binary value of 1 will be assigned to the Route 2 subset and a
value of 0 will be assigned to the Route 1 subset. Then, the participant’s actual route choice
probability distribution will be determined using Equations (11) and (13), and plots such as
Figures 5-7 can be obtained. Finally, the pi(n+1) values for the reward and penalty subsets can be
calibrated to match the actual probability distribution of the participant.
Based on the Linear Reward-Penalty scheme, the original values of “a” and “b” were 0.02 and
0.002 respectively for learning automata in various disciplines. However, these values provide
inaccurate results when applied to route choice behavior. For this model, the parameters had to be
derived using the suggested values as a reference. For each individual experiment, parameters “a”

Ozbay, Datta, Kachroo 20
and “b” were defined so that pi(n) would closely match the participant’s actual probability
distribution. Table 2 shows the results of the parameter analysis for all experiments. As evident in
the table, the values of the parameters had a wide range. “a” values ranged from 0.02 to 0.064,
while “b” values ranged from 0.001 to 0.002. This wide range is acceptable due to the large
variance implicit in route choice behavior and the participant’s learning curve. In other words,
participants who learned faster had large “a” values and small “b” values, whereas participants
who learned slower had smaller “a” and “b” values. The learning automaton for all experiments is
depicted in Figure 8. As can be seen, learning is present in all of the experiments. Also, the
learning rate consistently increases, aside from a slight deviation in Experiment #7. The irregular
behavior is due to an extreme variance in travel time experienced by this participant around day 15
and can therefore be looked over. Nonetheless, the similarity of the learning curves, plus the steady
increase in learning, proves that the derived parameter values accurately reflect learning, and that
the large variance in parameter values is acceptable because the learning automaton for each
experiment is similar. Based on the parameter values derived in each experiment, an average value
was derived for each parameter. The final value for “a” is 0.045, while the final value for “b” is
0.0016.
Table 2. Parameter values for each Experiment
Subject Number a values b values 1 0.064 0.001 2 0.038 0.0018 3 0.042 0.002 4 0.042 0.0015 5 0.055 0.001 6 0.053 0.0015 7 0.04 0.002 8 0.043 0.0015 9 0.043 0.0016 10 0.046 0.002 11 0.055 0.001 12 0.02 0.002
Average Value 0.045 0.0016

Ozb
ay, D
atta
, Kac
hroo
21

Ozbay, Datta, Kachroo 22
6.2 CONVERGENCE PROPERTIES OF ROUTE CHOICE DATA MODELED AS A
STOCHASTIC AUTOMATA PROCESS
A natural question is whether the updating is performed in a means compatible with intuitive
concepts of learning or, in other words, if it is converging to a final solution as a result of the
modeled learning process. The following discussion based on Narendra (1974) regarding the
expediency and optimality of the learning provides some insights regarding these convergence
issues. The basic operation performed by the learning automaton described in equations (6) and
(7) is the updating of the choice probabilities on the basis of the responses of the environment. One
quantity useful in understanding the behavior of the learning automaton is the average penalty
received by the automaton. At a certain stage n, if action α i , i.e. the route i , is selected with
probability p i ( n ) , the average penalty (reward) conditioned on p(n) is given as: (changed the
following equation to E{c from E{β
{ M ( n ) = E c ( n ) p ( n ) } = p l ( n ) l = 1
r ∑ c l
(14)
If no a priori information is available, and the actions are chosen with equal probability for a
random set, the value of the average penalty, M0 , is calculated by:
M 0 = c 1 + c 2 + . . . . . . . . . + c r
r where,
{c1, c2,… .cr} = penalty probabilities
(15)
The term of the learning automaton is justified if the average penalty is made less than M0 at least
asymptotically. M0 is also called a pure choice automata. This asymptotic behavior, known as
expediency, is defined by the Definition 1.
Definition 1 : (Narendra, 1974) A learning automaton is called expedient if limn→ ∞
E M(n)[ ]< M0 (16)
If the average penalty is minimized by the proper selection of actions, the learning automaton is
called optimal, and the optimality condition is given by Definition 2.

Ozbay, Datta, Kachroo 23
Definition 2: (Narendra, 1974) A learning automaton is called optimal if lim n → ∞ E M ( n ) [ ] = c l where
c l = min l
c l { }
(17)
By analyzing the data obtained on user route choice behavior, one can ascertain the convergence
properties of the behavior in terms of the learning automata. Since, the choice converges to the
correct one, namely the shortest routes, in the experiments conducted (Figures 5 and 6), it is clear
that the
limn → ∞
E[M(n)] = min{c1, c2}
This satisfies the optimality condition defined in (17). Hence, the learning schemes that are implied
by the data for the human subjects, are optimal . Since, they are optimal, they also satisfy the
condition that
limn → ∞
E[M(n)] < M0 Hence, the behavior is also expedient .
7.0 SLA-RC MODEL TESTING USING TRAFFIC SIMULATION
The stochastic learning automata model developed in the previous section was applied to a
transportation network to determine if network equilibrium is reached. The logic of the traffic
simulation, written in Java, is shown in the flowchart in Figure 9. The simulation consists of one
O-D pair connected by two routes with different traffic characteristics. All travelers are assumed
to travel in one direction, from the origin to the destination. Travelers are grouped in “packets” of
5 vehicles with an arrival rate of 3 seconds/packet. The uniform arrival pattern is represented by
an arrival array, which is the input for the simulation. The simulation period is 1 hour, assumed to
be in the morning peak. Each simulation consists of 94 days of travel.
Each iteration of the simulation represents one day of travel and consists of the following steps,
except for Day 1; (a) the traveler arrives at time t, (b) the traveler selects a route based on a
random number (RN) generated from a uniform distribution and the comparing it to p1(n) and
p2(n), (c) travel time is assigned based upon instantaneous traffic characteristics of the network, (d)
p1(n) and p2(n) are updated based upon travel time and route selection, (e) next traveler arrives.
This pattern continues for each day until the simulation is ended. As mentioned earlier,

Ozbay, Datta, Kachroo 24
Figure 9. Conceptual Flowchart for Traffic Simulation
START
READ INPUT ARRIVAL ARRAY
DAY = 1 ASSIGN P1 & P2 VALUES TO EACH PACKET
DAY > DAY N?
DAY = DAY + 1
PACKET = PACKET + 1
Calculate Travel Time
UPDATE P1 & P2 BASED ON LINEAR REWARD-PENALTY
REINFORCEMENT SCHEME
STOP
YES NO IF F(RN) <P1
CHOOSE ROUTE 1
CHOOSE ROUTE 2
Calculate Travel Time
UPDATE P1 & P2 BASED ON LINEAR REWARD-PENALTY
REINFORCEMENT SCHEME
YES
NO PACKET > TOTAL PACKETS
YES
NO
INITIALIZE

Ozbay, Datta, Kachroo 25
the first day is unique. Travelers arrive according to the arrival array. However, for Day 1, route
selection is based upon a random number selected from a uniform distribution. This method is
used to ensure that the network is fully loaded before “learning” begins. Route characteristics used
in the this simulation are shown below.
“Route 1” Length 20 km
Capacity qc = 4000 veh/hr
Travel Time Function
t = t0[1+a(q/qc)2]
where
a = 1.00, t0 = 20 minutes = 0.33 hrs
“Route 2” Length 15 km
Capacity qc = 2800 veh/hr
Travel Time Function
t = t0[1+a(q/qc)2]
where
a = 1.00, t0 = 15 minutes = 0.25 hrs
O-D Traffic 5600 veh/hr
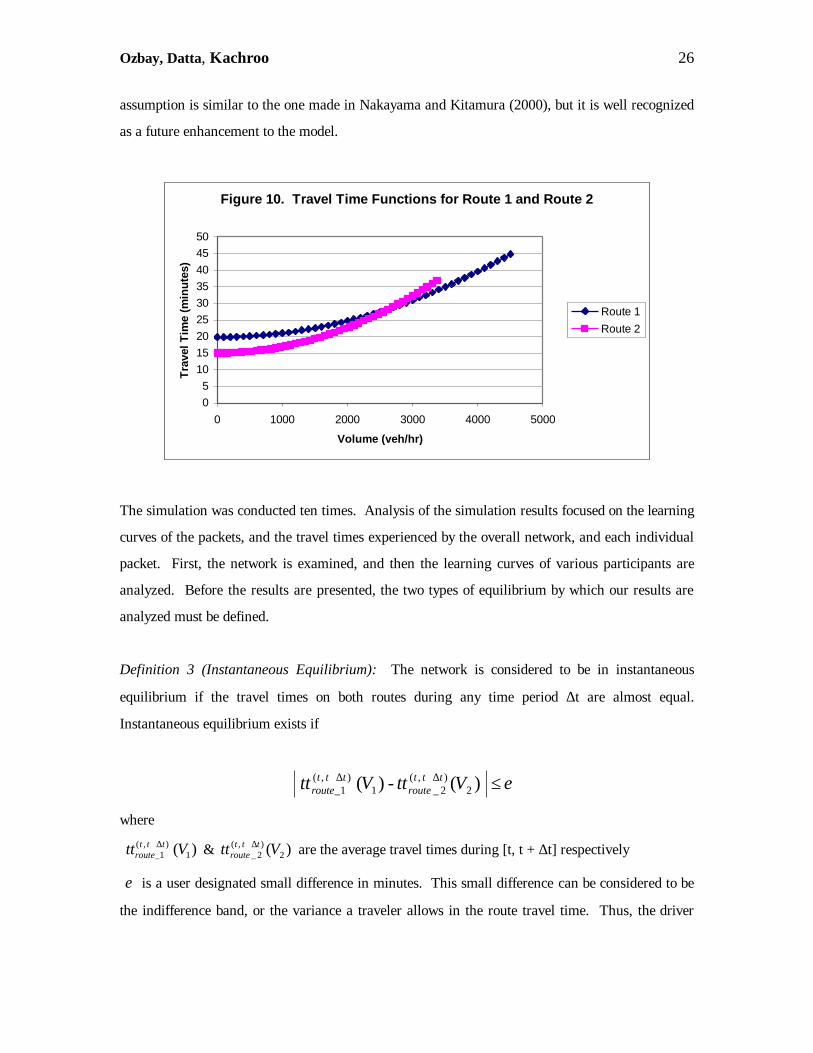
The volume-travel time relationship depicted by the travel time function for both routes can be seen
in Figure 10. Route 1 is a longer path and has more capacity. Hence, the travel time curve for this
route is flatter, and has a smaller slope. Route 2 is a shorter, and quicker route, with a smaller
capacity. Hence, the function is steeper and has a larger slope. Solving the travel time functions
for equilibrium conditions yields a flow of 2800 vehicles per hour with a corresponding travel time
of 30 minutes on Route 2, and 29.5 minutes on Route 1. The network used here is the same
network used in Iida et al. for the analysis of route choice behavior (1992).
The output of the simulation lists each customer’s travel times, route selection, volume on both
routes, and route choice probabilities for each day. Output data also includes the total number of
vehicles traveling on each route each day. One important point that needs to be emphasized is the
fact that our model does not incorporate “departure time” choice of travelers. It is assumed that
travelers, packets in this case, depart during the same [t, t + ∆t] time period every morning. This
Ozbay, Datta, Kachroo 26
assumption is similar to the one made in Nakayama and Kitamura (2000), but it is well recognized
as a future enhancement to the model.
Figure 10. Travel Time Functions for Route 1 and Route 2
05
101520253035404550
0 1000 2000 3000 4000 5000
Volume (veh/hr)
Tra
vel T
ime
(min
utes
)
Route 1Route 2
The simulation was conducted ten times. Analysis of the simulation results focused on the learning
curves of the packets, and the travel times experienced by the overall network, and each individual
packet. First, the network is examined, and then the learning curves of various participants are
analyzed. Before the results are presented, the two types of equilibrium by which our results are
analyzed must be defined.
Definition 3 (Instantaneous Equilibrium): The network is considered to be in instantaneous
equilibrium if the travel times on both routes during any time period ∆t are almost equal.
Instantaneous equilibrium exists if
)( - )( 2) ,(
2_1 ) ,(
1_ ε≤∆+∆+ VttVtt tttroute
tttroute
where
)( 1 ) ,(
1_ Vtt tttroute
∆+ & )( 2) ,(
2_ Vtt tttroute
∆+ are the average travel times during [t, t + ∆t] respectively
ε is a user designated small difference in minutes. This small difference can be considered to be
the indifference band, or the variance a traveler allows in the route travel time. Thus, the driver

Ozbay, Datta, Kachroo 27
will not switch to the other route if the travel time difference between the two routes is within [-
3,+3] minutes.
Definition 4 (Global User Equilibrium): Global user equilibrium is defined as
)( )( 22_11_total
routetotal
route VttVtt =
where
volume1 and volume2 are the total number of cars that used routes 1 and 2 during the overall
simulation period.
The total volumes and corresponding travel times, in minutes, on each route at the end of each
simulation are presented in Table 3. As can be seen, the overall travel times for each route are
very similar. The largest difference is 1.632 minutes, which can be considered negligible. This
fact shows that global user equilibrium, as defined in Definition 4, has been reached.
Table 3. Simulation Results
Route 1 Route 2 Volume Travel Time Volume Travel Time
Global User Equilibrium
3030 31.161 2800 31.877 -0.715 3090 31.616 2800 31.202 0.414 3155 32.118 2800 30.486 1.632 3140 32.001 2800 30.650 1.352 2980 30.789 2800 32.450 -1.660 3095 31.654 2800 31.146 0.508 3000 30.938 2800 32.219 -1.282 3075 31.501 2800 31.369 0.132 3105 31.731 2800 31.035 0.696 3005 30.975 2800 32.162 -1.187
Next, instantaneous equilibrium, described in Definition 3, is examined. Definition 3 ensures that
the difference between route travel times is similar and that each packet is learning the correct
route, namely the shortest route for its departure period. A large difference between route travel
times shows that the network is unstable because one route’s travel time is much larger than that of
the other, and that users are not learning the shortest route for their departure period. Table 4
shows the results of instantaneous equilibrium analysis.

Ozbay, Datta, Kachroo 28
The data is presented in percent form to reflect the 112,800 choices that are made during the
course of the simulation. The percentage of instantaneous equilibrium conditions ranged from
79.333% to 95.500%. This percentage signifies how often instantaneous equilibrium conditions
were satisfied throughout each simulation. For simulation 1, 95% of the 112,800 decisions were
made during instantaneous equilibrium conditions. These results state that most of the packets
choose the shortest route throughout the simulation period.
Figure 11 shows the evolution of instantaneous equilibrium during the course of the simulation.
For the first several days, the values are similar, yet incorrect. This can be attributed to the means
by which the network was loaded. Each packet required several days to begin the learning process.
The slope of each plot represents the learning process. As the packets begin to learn, instantaneous
equilibrium is achieved. Finally, each of these simulations achieved and maintained a high-level of
instantaneous equilibrium for several days before the simulation ended. This fact ensures network
stability and a relationship consistent with Definition 3. If the simulation is conducted for more
than 94 days, it is clear that better convergence results in terms of “instantaneous equilibrium” will
be obtained.
Table 4. Success Rate of Instantaneous Equilibrium
Simulation Number
Instantaneous Equilibrium
1 95.000% 2 86.667% 3 86.000% 4 93.333% 5 79.333% 6 81.667% 7 83.083% 8 90.250% 9 90.333% 10 95.500%

Ozbay, Datta, Kachroo 29
Evolution of Instanteous Equilibrium
00.10.20.30.40.50.60.70.80.9
1
0 20 40 60 80 100
Day
Per
cent
age
Simulation #3Simulation #8Simulation #10
Figure 11. Evolution of Instantaneous Equilibrium
Finally, the learning curves for several packets individual packets can be seen in Figure 12. All of
the curves packets exhibit a high degree of learning. The slope of each curve is steep, which
evidences a quick learning rate. The packets in this figure were chosen randomly. The flat portion
of three of the curves indicates that learning is not yet taking place; rather, instability exists within
the network at that time. However, once stability increases, the learning rate increases greatly.
Another proof that learning is taking place is the percent of correct decisions taken by each packet.
For the packets shown in Figure 12, the percentage of correct decisions were mixed. Packet 658
choose correctly 78% of the time it had to make a route choice decision, while packets 1120
(simulation 4) and 320 choose correctly 73% and 75% of the times these packets had to make route
choice decisions. Obviously, the correct choice is the shortest route. These learning percentages
reflect all 94 days of the simulation. As can be seen from the graph, each packet is consistently
learning throughout the entire simulation. The variability in the plots is due to the randomness
introduced by the generated random number. On any day of the simulation, the random number
generated can cause travelers to choose incorrectly, even though the traveler’s route choice
probability (p1 and p2) favors a certain route (i.e. p1 > p2 or p2 > p1).

Ozbay, Datta, Kachroo 30
Learning Curves for Arbitrary Packets
00.10.20.30.40.50.60.70.80.9
1
0 20 40 60 80 100
Day
Per
cent
age Packet 658 Simulation8
Packet 1120 Simulation 4Packet 1120 Simulation 3Packet 320 Simulation 9
Figure 12. Learning Curves for Arbitrary Packets
Further proof of the accuracy of the SLA-RC model is gained through comparison of Figures 11
and 12. Figure 11 displays the occurrence of instantaneous network equilibrium, whereas Figure
12 displays the learning curve for various travelers. Based on Figure 11, the occurrence of
instantaneous equilibrium is constantly increasing throughout the entire simulation. As
instantaneous equilibrium increases, so does the learning rate of each packet, as seen in Figure 12.
8.0 LEARNING BASED ON THE EXPECTED AND EXPERIENCED TRAVEL
TIMES ON ONE ROUTE
The penalty-reward criterion used in the previous section has been modified to test the learning
behavior of drivers who do not have full information about the network-wide travel time
conditions. This criterion can be described as follows.
If, i router
i act,r
i exp, tt tt ε≤−
Then, the actionα l is considered a success. Otherwise, it is considered a failure and the
probability of choosing route i is reduced according to the linear reward-penalty learning scheme
described in the previous sections.
where

Ozbay, Datta, Kachroo 31
ri exp,tt is the travel time expected by user i on route r.
ri
rflow-free
ri exp, tt tt Ε+=
i routeε = allowed time for early or late arrival
ri act,tt = travel time actually experienced by user i on route r
riΕ is the random error term representing the personal bias of user i and is obtained from a
normal distribution with mean µ = 0, and standard deviation σi, N(µ, σi).
This simulation was conducted for six trials. The expected travel time for each traveler was the
free-flow travel time for each route (same as before) plus a random error generated from the
distribution N(8.5,1.5) minutes. Using these criteria, the following results were obtained.
The range in travel times obtained for each route is shown in Table 5. Travel times on Route 1
ranged from 30.938 minutes to 31.846 minutes, whereas for Route 2, travel times ranged from
30.869 minutes to 32.219 minutes. The difference between overall route travel times ranged from
1.282 minutes to 0.320 minutes, which are relatively small differences in travel time. These results
are similar to the results obtained in the previous simulation. It can be stated that “global user
equilibrium”, as defined in Definition 4, has been achieved.
Route 1 Route 2
Volume Travel Time Volume Travel Time
Global User Equilibrium
3120 31.846 2880 30.869 0.977 3010 31.012 2990 32.105 -1.093 3085 31.578 2915 31.257 0.320 3050 31.312 2950 31.650 -0.338 3050 31.312 2950 31.650 -0.338 3105 31.731 2895 31.035 0.696 3020 31.086 2980 31.991 -0.904 3000 30.938 3000 32.219 -1.282 3010 31.012 2990 32.105 -1.093
Table 5. Travel Time Differences
Table 6 displays the results for instantaneous equilibrium calculations. For this model,
instantaneous equilibrium rates were not as consistent, or high, as in the previous model.

Ozbay, Datta, Kachroo 32
Table 6. Success Rate of Instantaneous Equilibrium
Simulation Number Instantaneous Equilibrium
1 85.167% 2 80.417% 3 88.750% 4 95.750% 5 81.833% 6 88.750% 7 91.000% 8 95.417% 9 80.917% 10 88.833%
The expected travel time for each customer was random, so that some customers could have
smaller expected travel times that were closer to the free-flow travel time, rather than the
equilibrium travel time. On other hand, those customers with larger expected travel times were
closer to equilibrium travel times. Hence, global user equilibrium was achieved when both types of
customers found the shortest route for themselves, since global user equilibrium uses the total
volume on each route. However, instantaneous equilibrium was not always achieved because the
customers with larger expected travel times could travel on the longer route because the difference
between the actual travel time and the expected travel time was still below the minimum. This fact
is consistent with the real behavior of drivers. Some drivers choose longer routes because their
expected arrival times are quite larger than for other drivers.
Finally, the learning rate of individual packets needs to be addressed. Figure 13 shows the learning
rate for four packets. Three of the four packets have a consistent learning rate, and then on day
50, the slope of their learning rate begins to increase dramatically. Packet 340 experienced a high
rate of learning in the beginning of the simulation, which then tapered off slightly. However, by the
end of the simulation, this packet’s learning rate was relatively equal to the learning rates of the
other packets. These four packets choose the correct route approximately 85% of the time they
had to make route choice decisions. The random error term for each packet ranged from 7.05 to
8.45 minutes. These results show that each packet learned the shortest route for their expected
travel times quickly and efficiently.

Ozbay, Datta, Kachroo 33
Figure 12. Learning Curve for Arbitrary Packets
00.10.20.30.40.50.60.70.80.9
1
0 20 40 60 80 100
Day
Per
cent
age Packet 340 Simulation 4
Packet 1100 Simualtion 2Packet 450 Simulation 3Packet 765 Simulation 8
Figure 13. Learning Curves for Arbitrary Packets
9.0 CONCLUSIONS AND RECOMMENDATIONS
In this study, the concept of Stochastic Learning Automata was introduced and applied to the
modeling of the day-to-day learning behavior of drivers within the context of route choice behavior.
A Linear Reward-Penalty scheme was proposed to represent the day-to-day learning process. In
order to calibrate the SLA model, the Internet based Route Choice Simulator (IRCS) was
developed. Data collected from these experiments was analyzed to show that the participants’
learning process can be modeled as a stochastic process that conforms to the Linear Reward-
Penalty Scheme within the Stochastic Automata theory. The model was calibrated using
experimental data obtained from a set of subjects who participated in the experiments conducted at
Rutgers University. Next, a two-route simulation network was developed, and the developed SLA-
RC model was employed to determine the effects of learning on the equilibrium of the network.
Two different sets of penalty-reward criteria were used. The results of this simulation indicate that
network equilibrium was reached, in terms of overall travel time for the two routes, as defined in
Definition 4, and instantaneous equilibrium for each packet, as defined in Definition 3. In the
future, we propose to extend this methodology to include departure time choice and multiple origin-
destination networks with multiple decision points.

Ozbay, Datta, Kachroo 34
REFERENCES
1. Atkinson, R.C., G.H. Bower and E.J. Crothers, An Introduction to Mathematical Learning
Theory, Wiley, New York, 1965.
2. Baba, New Topics in Learning Automata Theory and Applications, Lecture Notes in Control
and Information Sciences, Springer-Verlag, Berlin, 1984.
3. Bush, R.R., and F. Mosteller, Stochastic Models for Learning, Wiley, New York, 1958.
4. Cascetta, E., and Canteralla, G.E., “Dynamic Processes and Equilibrium in Transportation
Networks: Towards a Unifying Theory”, Transportation Science, Vol.29, No.4, pp.305-328,
1985.
5. Cascetta, E., and Canteralla, G.E., “A day-to-day and within-day Dynamic Stochastic
Assignment Model”, Transportation Research, 25a(5), 277-291 (1991).
6. Cascetta, E., and Canteralla, G.E., “Modeling Dynamics in Transportation Networks”, Journal
of Simulation and Practice and Theory 1, 65-91 (1993).
7. Chandrasekharan, B., and D.W.C. Shen, “On Expediency and Convergence in Variable
Structure Stochastic Automata,” IEEE Trans. on Syst. Sci. and Cyber., 1968, Vol.5, pp.145-
149.
8. Davis, N. and Nihan, “Large Population Approximations of a General Stochastic Traffic
Assignment Model” Operations Research (1993).
9. Fu, K.S., “Stochastic Automata as Models of Learning Systems,” in Computer and
Information Sciences II, J.T. Lou, Editor, Academic, New York, 1967.
10. Gilbert, V., J. Thibault, and K. Najim, “Learning Automata for Control and Optimization of a
Continuous Stirred Tank Fermenter,” IFAC Symp. on Adap. Syst. in Ctrl. and Sig. Proc.,
1992.
11. Iida, Yasunori, Takamasa Akiyama, and Takashi Uchida, “Experimental Analysis of Dynamic
Route Choice Behavior,” Transportation Research Part B, 1992, Vol 26B, No. 1, pp 17-32.
12. Jha, Mithilesh, Samer Madanat, and Srinivas Peeta, “Perception Updating and Day-to-day
Travel Choice Dynamics in Traffic Networks with Information Provision,”.
13. Kushner, H.J., M.A.L. Thathachar, and S. Lakshmivarahan, “Two-state Automaton a
Counterexample,” Dec. 1979, IEEE Trans. on Syst., Man and Cyber.s, 1972, Vol. 2, pp.292-
294.

Ozbay, Datta, Kachroo 35
14. Mahmassani, Hani S., and Gang-Len Ghang, “Dynamic Aspects of Departure-Time Choice
Behavior Commuting System: Theoretical Framework and Experimental Analysis,”
Transportation Research Record, Vol. 1037.
15. Najim, K., “Modeling and Self-adjusting Control of an Absorption Column,” International
Journal of Adaptive Control and Signal Processing, 1991, Vol. 5, pp. 335-345.
16. Najim, K., and A. S. Poznyak, “Multimodal Searching Technique Based on Learning
Automata with Continuous Input and Changing Number of Actions,” IEEE Trans. on Syst.,
Man and Cyber., Part B, 1996, Vol. 26, No. 4, pp.666-673.
17. Najim, K., and A.S. Poznyak, eds., Learning Automata: theory and applications, Elsevier
Science Ltd, Oxford, U.K., 1994.
18. Nakayama, Shoichiro and Ryuichi Kitamura, “A Route Choice Model with Inductive
Learning,” Submitted for publication in Transportation Research Board.
19. Narendra, K.S., and M.A.L. Thathachar, Learning Automata, Prentice Hall, New Jersey,
1989.
20. Narendra, K.S., “Learning Automata”, IEEE Transactions on Systems, Man, Cybernetics,
pp.323-333, July, 1974.
21. Rajaraman, K., and P .S. Sastry, “Finite Time Analysis of the Pursuit Algorithm for Learning
Automata,” IEEE Trans. on Syst., Man and Cyber., Part B, 1996, Vol. 26, No. 4, pp.590-
598.
22. Sheffi,Y., “Urban Transportation Networks”, Prentice Hall, 1985.
23. Tsetlin, M.L., Automaton Theory and Modeling of Biological Systems, Academic, NY, 1973.
24. Ünsal, C., John S. Bay, and P. Kachroo, “On the Convergence of Linear REpowerd-Penalty
Reinforcement Scheme for Stochastic Learning Automata,” submitted to IEEE Trans. in Syst.,
Man, and Cyber., Part B, August 1996.
25. Ünsal, C., P. Kachroo, and John S. Bay, “Multiple Stochastic Learning Automata for Vehicle
Path Control in an Automated Highway System,” submitted to IEEE Trans,. in Syst., Man,
and Cyber., Part B, May 1996.
26. Unsal, C., John S. Bay, and Pushkin Kachroo, “Intelligent Control of Vehicles:
Preliminary Results on the Application of Learning Automata Techniques to Automated
Highway System”, 1995 IEEE International Conference on Tools with Artificial
Intelligence.

Ozbay, Datta, Kachroo 36
27. Unsal, C., Pushkin Kachroo, and John S. Bay , “Simulation Study of Multiple Intelligent
Vehicle Control Using Stochastic Learning Automata”, (to be published) Transactions of
the International Society of Computer Simulation, 1997.
28. Vaughn, K.M., Kitamura, K., Jovanis, P., “Modeling Route Choice under ATIS in a
Multinomial Choice Frameworm”, Transportation research Board, 75th Annual Meeting,
Washington D.C., 1996.