Modeling and verification of an excavator system – Axial ... · Modeling and verification of an...
11
The 13th Scandinavian International Conference on Fluid Power, SICFP2013, June 3-5, 2013, Linköping, Sweden Modeling and verification of an excavator system – Axial Piston Pump, Kinematics and Load Sensing Flow Sharing Valve Block Professor Dr.-Ing. Paolo Casoli, Dr.-Ing. Luca Riccò, Dr.-Ing. Dolcin Cesare* Industrial Engineering Department, University of Parma (Italy) *Walvoil S.p.A., Reggio Emilia (Italy) E-mail: [email protected] Abstract This paper presents the results of a study focused on mathematical modeling of an excavator hydraulic system, composed by: the pump gray box model, the kinematics model and the valve white box model. The kinematics model has been realized using the planar mechanical library of AMESim ® and is composed by the front excavation tool: the arm, the boom and the bucket. The valve section white box model has been validate with the comparison between the numerical and experimental result obtained during the laboratory tests. The excavator is equipped by a full flow sharing valve, that is very useful in this kind of machinery when during a digging cycle all the valve sections are used at the same time. In this paper the excavator mathematical model system will be composed by the pump, the kinematics and two valve sections. The new system will be validated with the comparison between the experimental results, obtained with two sections working at the same time, and the numerical results provided by the simulation. The experimental results will be obtained in two different working conditions: standard operation condition and flow saturation condition. This will show the mathematical model capability in the study of the interaction between all the system components and could be useful in the study of alternative control strategies towards energy efficient systems and new control system designs. Keywords: Hydraulic Excavator, Load Sensing, Mathematical Model, Energy Saving. 1 Introduction In the last years, the simulation of the kinematics and dynamics of multi-body systems is a topic of increasing importance in many industrial branches, due to its potential for providing insight into inherent effects governing the systems’ behavior and for reducing manufacturing costs. Furthermore with the continuous petrol price rising the higher interest in energy saving is rising as well. Lots of researchers have been studying for years these topics. Focusing on mobile machineries, one of the primary needs is that of consume the less energy possible to complete a working cycle, like a standard digging cycle[1]. In other words one of the principal target being that of achieving more efficient machinery. Due to this, one of the first goals for machinery producers is the energy saving toward the optimization of their products, the system components interaction, and also with the introduction of energy recovery systems. Study such a complex system (like an excavator) require time, know-how and lot of money. Thus mathematical models are always more used. Typically, mobile machineries hydraulic system are composed by a variable displacement axial piston pump [2] and proportional directional valves [3]. The hydraulic system controls the kinematics movements, under user needs. An excavator system is a very complex nonlinear plant, and for this reason a suitable mathematical model is needed as well as a good simulation tool. Many qualities are required from mathematical models, including accuracy, predictability for the simulated 53
Transcript of Modeling and verification of an excavator system – Axial ... · Modeling and verification of an...

The 13th Scandinavian International Conference on Fluid Power, SICFP2013, June 3-5, 2013, Linköping, Sweden
Modeling and verification of an excavator system – Axial Piston Pump, Kinematics and Load Sensing Flow Sharing Valve Block
Professor Dr.-Ing. Paolo Casoli, Dr.-Ing. Luca Riccò, Dr.-Ing. Dolcin Cesare*
Industrial Engineering Department, University of Parma (Italy) *Walvoil S.p.A., Reggio Emilia (Italy)
E-mail: [email protected]
Abstract
This paper presents the results of a study focused on mathematical modeling of an excavator hydraulic system, composed by: the pump gray box model, the kinematics model and the valve white box model. The kinematics model has been realized using the planar mechanical library of AMESim® and is composed by the front excavation tool: the arm, the boom and the bucket. The valve section white box model has been validate with the comparison between the numerical and experimental result obtained during the laboratory tests. The excavator is equipped by a full flow sharing valve, that is very useful in this kind of machinery when during a digging cycle all the valve sections are used at the same time. In this paper the excavator mathematical model system will be composed by the pump, the kinematics and two valve sections. The new system will be validated with the comparison between the experimental results, obtained with two sections working at the same time, and the numerical results provided by the simulation. The experimental results will be obtained in two different working conditions: standard operation condition and flow saturation condition. This will show the mathematical model capability in the study of the interaction between all the system components and could be useful in the study of alternative control strategies towards energy efficient systems and new control system designs.
Keywords: Hydraulic Excavator, Load Sensing, Mathematical Model, Energy Saving.
1 Introduction
In the last years, the simulation of the kinematics and dynamics of multi-body systems is a topic of increasing importance in many industrial branches, due to its potential for providing insight into inherent effects governing the systems’ behavior and for reducing manufacturing costs. Furthermore with the continuous petrol price rising the higher interest in energy saving is rising as well. Lots of researchers have been studying for years these topics. Focusing on mobile machineries, one of the primary needs is that of consume the less energy possible to complete a working cycle, like a standard digging cycle[1]. In other words one of the principal target being that of achieving more efficient machinery. Due to this, one of the first goals for machinery producers
is the energy saving toward the optimization of their products, the system components interaction, and also with the introduction of energy recovery systems. Study such a complex system (like an excavator) require time, know-how and lot of money. Thus mathematical models are always more used. Typically, mobile machineries hydraulic system are composed by a variable displacement axial piston pump [2] and proportional directional valves [3]. The hydraulic system controls the kinematics movements, under user needs. An excavator system is a very complex nonlinear plant, and for this reason a suitable mathematical model is needed as well as a good simulation tool. Many qualities are required from mathematical models, including accuracy, predictability for the simulated
53

system behavlow computaThe researchmathematicais under denvironmentdeveloped tothe original eThe followinpump, the floand validatemodels.
2 Physica
As already important qmodel of cpredictable olast but not leCertainly in study the firrole, but in tinteraction bpump, the computationaTaking this under develotime while behaviors preThe mathemgraybox modwhite box mo
2.1 Pump M
The pump, mvariable dispby Casappa®
Its mathemastate conditexperimental[4]. The valiis in progressin fig.1, hascomposed byits regulatorsand the flowmodel of the
2.2 Kinema
The kinematithe front exc
viors (stationation time. h reported i
al model, for developing u. The math
o be as simplelements functng sections pow sharing vaed results of
l Modeling
described in qualities requcomplex sysof transient aneast short calc
the individurst two characthe complete between all th
valve and al time becom
into accounopment, has thmaintaining edictability.
matical model del, the kinemodel.
Model
mounted on thplacement axia® S.p.A. and beatical model htions, with l and numericidation of the s. The pump ms been definey the combinas, such as thew compensatopump’s flow
atics Model
ics model, shoavation tool o
nary and trans
in this papera middle sizeusing AMEShematical mole as possibletions. present the malve, the excavthe pump m
g
the introducuired from atems are: r
nd stationary bculation time. ual componencteristics playsystem study,he componen
the kinemmes very impont, the mathehe skill of a sa satisfactory
is composedmatics model
he excavator, ial piston pumelongs to the Mhas been valid
the compacal results inmodel in tran
mathematical ed gray box ation of whitee pressure coor (FC), andcharacteristic
own in fig.2, only: arm, boo
sient) as well
r describes te excavator, thSim® modeliodel has be while ensuri
modeling of tvator kinemat
model and val
ction, the moa mathematicesult accuracbehaviors and
nts optimizatiy a predomina, focused on tnts, such as tmatics a sh
rtant. ematical modshort calculatiy accuracy a
d by: the puml and the val
is a load sensimp [2] develop
MVP series. dated, at steaarison betwen previous wonsient conditimodel, depictbecause it
e box model fmpensator (P the black b
c.
is composed om and bucket
as
the hat ing een ing
the tics lve
ost cal cy,
d at
ion ant the the
hort
del ion and
mp lve
ing ped
ady een ork ion ted
is for
PC) box
by t.
Thon
Cinpathfahybothcaeqremst[6ac[7
2.
ThWItscocoreInthduthoc
he kinematicsn the hydrauli
Figure 1: A
onsidering thentegral with arameters werhe Planar Mecacilitates the uydraulic cylinoom, arm andhe hydraulic ran be derivequations to evolute pairs
multipliers andabilization me
6]. The modecting on the bu7].
.3 Valve Sec
he valve secWalvoil® S.p.a.
s mathematiconsidering onomparison betesults obtainedn a mobile mahe use of thisuring a standahe valve sectioccur, the pu
s model is usec actuators.
MESim® Pum
e benefits of hthe hydrau
re coupled to chanics librarunderstandingnder. The drid bucket are gram actuators.ed by applya Lagrangia
have beend are calculaethod applied l is not yet ucket during t
tion Model
ction is a ful. and belongs cal model hanly one sectween the sim
d during laboraachinery, suchs kind of valvard digging cyons at the samump could w
ed to create re
mp Mathemati
having the kinulic model,
the hydraulicry of AMESig of dynamic iving joint togenerated by . The equatioying the Euan energy fun modeled ated from thto the constraset to simulathe interaction
ull flow sharito the DPX se
as been validction workinmulation and ratory tests. h an excavatorlve is very usycle [1] are al
me time. Whenwork in flo
ealistic forces
cal Model
nematic modelthe linkage
c model usingim® [5]. Thisloads on the
orques of thethe forces of
ons of motionuler–Lagrangeunction. Theas Lagrange
he Baumgarteaint equationsate the forcesn with the soil
ing valve byeries. dated in [8],
ng, with theexperimental
r under study,seful becauselmost used alln this situationow saturation
s
l e g s e e f n e e e e s s l
y
, e l
, e l n n
54

condition, i.required by t
Figure 2: AM
If this situaticontrol on dangerous, bmaintains ththe control onThe principakeeping in composed bythat of defineactuator, mathe main spoand provide needed. It’smathematicarecreate all oFor this reasodeveloped ncomplex valfig.3, able toreal valve. Tcompare by retain all thevalve sectiomathematicaall the valve
2.4 Govern
The governinteraction ba mechanicacalculates thflow rate bet
e. the pump the valve bloc
MESim® Kine
ion occur, thethe moving
but with this khe control on n their movemal working cmind that thy lots of sectie the outlet flintain the preool metering the flow shars easy und
al model for of this functionon the valve m
not like a simlve, the AMEo recreate theThis has incran ideal valv
e original woon. This is al model, able sections.
ning Equation
ning equationetween a fluid
al-geometricalhe pressures itween adjacen
flow is lessk.
ematics Mathe
e operator canparts, that
kind of valve tthe parts mo
ments velocityondition of a
he complete ions (defined low through tessure drop coarea, define ting operation erstandable the valve canning conditionmathematical mple valve, bESim® sketche working funeased the simve model but orking conditi
the plus ofto recreate th
ns
ns are descd-dynamic mol model (MGinside the chnt chambers, w
s than the flo
ematical Mode
n lose the direcould be ve
the operator sovements losiy only. a valve sectiovalve could valve block),he section to onstant betwethe LS pressucondition whthat a simpnnot be able ns. model has be
but like a deh is reportednctioning of tmulation time
has allowed ons, of the ref this kind he interaction
cribed by todel (FDM) a
GM). The FDambers and twhile the MG
ow
del
ect ery still ing
on, be
, is its
een ure hen ple to
een emi
in the
e if to
eal of of
the and DM the
GM
caits
ThThunpr
Thtefusuencowocgeco
Thcobalitcooforcasp
alculates the fos dynamics an
Figure 3: AM
he FDM is bahe pressure iniform and timressure-rise ra
he model amperature. T
unction of pummation terntering or leaonsidering the
with the consccurring throueneralized Beonditions, Eq.
he user sets oefficient of asis of experimterature, suchoefficient of df Reynolds nur fully turbulalculates the inpool using New
orces acting ond the flow are
MESim® ValvMod
ased on a lumnside each come dependentate equation:
1assumes a cThe fluid depressure as m represents
aving the vole contributionsidered volumugh the orificernoulli’s equ(2):
an appropriatdischarge of mental data o
h as [10]; thdischarge valueumber, to accoent conditionnstantaneous pwton’s second
on the spool aneas.
ve Section Matdel
mped parameteontrol volumt, and is deter
constant valensity is eva
described is the net malume. This isn of all orificme. The maces is calculauation under
2|∆ |ate saturated vf each connecor using valuehereafter the ue is evaluatedount for partians. The mechposition and vd law.
nd determines
thematical
er framework.me is assumed
rmined by the
(1)
lue of fluidaluated as ain [9]. Theass flow rates obtained byces connectedass exchangeated using the
quasi-steady
(2)
value for thection, on thees reported ininstantaneous
d as a functionally developedhanical modelvelocity of the
s
. d e
d a e e y d e e y
e e n s n d l e
55

The forces aspring forceStatic and dyof the KarnStribeck effeare assumed model the hy
3 Experim
Figure 4 reprsetup that hfunctioning athe features o
Sensor
M
P
P1 – P8
Q1 – Q2
T Tor
Θ Incr
LVDT L
diffe
Table 1: Feaappa
acting on the e, friction foynamic frictionopp friction ect; static and
constant; in ydrodynamic f
mental Setu
resents the ISOhas been usedas a double seof the used sen
Type
Prime mover
Pump
Strain gage
Flow meter
rque/speed meter
remental encoder
Linear variable erential transducer
atures of sensaratus used in
spool are: hyorces, hydrodon forces are e
model and dynamic frictthis simplifiedforces are neg
up
O schematic od to verify t
ections. In tablnsors.
MainABB®, 4-quad
7
CASAPPA®
Trafag®, Scaleac
VSE® VS1, S0.3% measur
HBM® T, ScaAccu
HEIDENHAIimp./r, 4000 r/
1/20 pe
r Magnet Sc
sors and main n the present r
Figure 4: Te
drostatic forcdynamic forcevaluated by uconsidering ttion coefficiend version of tlected.
of the test benthe valve blole 1 are report
n features drant electric mot75 kW
® MVP60, 84 cm3
0..400 bar, 0.3%ccuracy
Scale 0.05..80 l/mred value accuracale: 0..500 Nm, 0.uracy Class IN® ERN120, 36/min Limit velociriod accuracy
chuz AVAX 015
elements of thresearch
est setup for L
ces, ces. use the nts the
nch ock ted
tor,
3/r
% FS
min, cy .05
00 ity,
he
ThcovaThdiFiwpospFiex
Load Sensing F
he tests weromposed by ariable displache pump has irectly connecigure 5 illustra
with the pressuositions of thpool and the pigure 6 show txperimental te
Figure 5: Va
Flow Sharing
e carried outwo valve s
cement pump.been instrumeted with the sates the cross ure mapping
he two LVDTressure compethe test bench
est.
alve with LVDMapping
Valve Block
ut using the sections coup. ented by an a
swash plate. s section of th
points and tT’s connectedensator. h picture befor
DT mounted ang Points
valve block,pled with the
angular sensor
he valve alongthe mounting
d to the main
re starting the
nd Pressure
, e
r
g g n
e
56

3.1 Experim
As mentionecarried out:
- Dosa
- Dosa
The first opstandard conas double prhas a constaload. The twoThe pump spspools openinpump margitemperature a
Fig
The second oflow saturatcircuit is higsections loadhas been set for the two pump margitemperature m
Figure 6: Te
mental Settin
ed before, two
ouble pressureaturation; ouble pressur
aturation. perating condindition, i.e. wiressure compeant load and o loads pressu
peed has been ng position hain has been at 50 °C.
gure 7: Sectio
operation condtion, i.e. the gher than the pd are represenat 1000 rpm amain spools
in has been maintained co
est Bench Layo
ng condition
o different typ
e compensatio
re compensat
ition has beethout flow satensation, whethe section 2
ure are displayset at 1500 rp
as been reportset at 20 b
ons Imposed L
dition has beerequired flow
pump’s outletnted in fig.9, tand the openinare depicted set at 15 ba
onstant at 50 °
out
pe of tests we
on, without flo
tion, with flo
en performed turation, definre the section
2 has a variaby in fig.7. pm and the mated in fig.8. T
bar and the
Loads
en performed iw rate by tht flow. The twhe pump speeng position lain fig.10. Th
ar and the o°C.
ere
ow
ow
in ned n 1 ble
ain The oil
in he
wo ed aw he oil
Thtofeinabto
Figure
he transient po the test beneedback controntroduce problble recreate tho prove the mo
Figu
Figur
e 8: Main Spoo
pressure peaksnch pressure ol system settlem, rather if his actual conodel accuracy.
ure 9: Sections
re 10: Main Sp
ools Displacem
s, visible in fproportional
ting. The transthe mathemat
ndition, will b.
ns Imposed Lo
pools Displac
ment
fig. 9, are duel relief valvesient does nottical model is
be very useful
ad
cement
e e t s l
57

4 Comparsimulati
Figure 11 decomprising olayout mount
4.1 Double saturati
In this paraexperimentaltest.
rison betwion result
epicts the AMof the pump ated on the test
pressure ion
agraph are col result obtain
Figure 12
ween exper
MEsim® sketcand valve usedt bench, as sho
compensati
ompared the ned during th
2: Inlet Pressu
Figure 11: T
imental an
h of the systed to recreate town in fig.4.
on, no flo
numerical ahe first type
ure
Test setup for L
nd
em the
ow
and of
Load Sensing
Fig
Figure 1
Flow Sharing
gure 13: Load
14: Intermedia
g Valve Block
Sensing Pres
ate Pressure S
k
sure
Section 1
58

Figur
Figure 1
Figure 1
re 15: Interme
16: Compensa
17: Compensa
ediate Pressur
ator Displacem
ator Displacem
re Section 2
ment Section 1
ment Section 2
1
2
Figur
Figur
Figur
re 18: Outlet F
re 19: Outlet F
re 20: Pump Sw
Flow Rate Sec
Flow Rate Sec
Swash Plate Po
ction 1
ction 2
osition
59

Figures 12, 1load sensing for all the vaFigure 14, 1pressures (se1 and 2 pshowed in figFigures 18, experimentalsection 1 andAs can be seall the pressu2% if compamathematicarates with a ma simplified mIt’s possible capability tposition. Figure 20 repthe simulatioaccurately.
4.2 Double saturati
In this paraexperimentaltest. Figureschambers in common forpressures. Firates compabetween 30s 1 decreases open.
Figure 25 dunfortunatelysection 1 prLVDT absenalready seenwithout flowvalve section
13 show the copressure. Thi
alve sections. 15 refer to see fig. 5). Thepressure comgures 16 and1
19 depict thl and simulad the section 2een the model ures inside theare with the eal model is abmaximum erromodel. to observe th
to calculate
ports the pumpon data matc
pressure ion
agraph are col result obtains 21 – 24 shthe valve blor the valve igures 26, 27 arison. When
and 70s, the until the sec
Figure 21
epicts the disy is not posressure compnce when this n in the doublw saturation cn has the capa
omparison of is two pressur
ection 1 ande comparison
mpensators di7. he compariso
ation outlet f2.
has the capabe chambers wexperimental dble to recreateor among 10%
hat the model the actual
mp swash platech the experi
compensatio
ompared the ned during thehow the presck: the inlet ablock and thshow the sect
the flow saoutlet flow ra
ction 2 main
1: Inlet Pressu
splacement ofssible compa
pensator posittest has been
le pressure cocondition, theability to perf
the inlet and tres are comm
2 intermediabetween sectisplacement a
on between tflow rates fro
bility to recreawith errors unddata; further te the outlet flo%, acceptable f
has also a gocompensato
position, whemental positi
on, with flo
numerical ae second type ssure inside tand LS pressuhe intermediations outlet floaturation occate from secti
n spool remai
ure
f the section are it with ttion due to tn carried out. Aompensation te model of tform good res
the mon
ate ion are
the om
ate der the ow for
ood ors
ere ion
ow
and of
the ure, ate ow
cur, ion ins
2, the the As
test the sult
foananm
or the two wond the pressurn acceptable
match the exper
Fig
Figure 2
Figure 2
orking conditire compensatoway by the rimental one s
gure 22: Load
23: Intermedia
24: Intermedia
ions. The outor position ar
model and satisfactorily.
Sensing Pres
ate Pressure S
ate Pressure S
let flow ratese recreated inthe pressures
sure
Section 1
Section 2
s n s
60

Figure 2
Fig
Fig
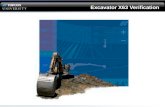
5 Excavat
The excavatodepicted in fthe engine po
25: Compensa
gure 26: Outle
gure 27: Outle
tor Model a
or under studyfig 28. Its opeower is 46.5 k
ator Displacem
et Flow rate S
et Flow rate S
and cycle s
y is a middleerating weightkW at 2200 rpm
ment Section 2
Section 1
Section 2
imulation
size one andt is 9500 kg am.
2
d is and
BprmThhaThde15LSinpomFifigdethfoim
Figure
ased on the revious sectio
models are caphus to widenas been includhe complete sescribed in fi500 rpm. FiguS pressures. T
n fig 31. Figuosition during
model capabiliigure 33 depigures in thevelopers an he pump and thor studying mprovements i
Figure
e 28: Photogra
analysis of n, it is evidenpable of repron the model cded as illustratsystem was sug 29. The puure 30 shows The sections inure 32 reportsg the cycle anty to recreatects the pump is section pinsight into the valve. Thenew control in the design o
e 29: Valve se
raph of the exc
results presnt that the pumoducing actuacapabilities thted in fig 34. ubjected to a ump speed has the simulatenlet flow ratess the section nd it’s possible the compen
swash plate provides to the internal fu
ese informatiostrategies o
of these comp
ection spools p
cavator
sented in themp and valveal conditions.he kinematics
duty cycle asas been set atd system ands are depictedcompensatorse observe the
nsating mode.position. The
the systemfunctioning ofon are needfulor proposing
ponents.
position
e e . s
s t d d s e . e
m f l g
61

Figurre 30: System
Figure 31: Se
Figur
and Load Sen
ections inlet fl
re 34: AMESi
nsing pressure
flow rate
m® sketch of t
e
the front exca
Figure 3
Figu
vator tool and
32: Sections co
ure 33: Pump
d hydraulic cir
ompensator d
swash plate p
rcuit.
displacement
position
62

6 Conclusion
This paper has presented the analysis of an excavator system. A nonlinear mathematical model of an excavator has been developed using the AMESim® modeling environment to replicate real operating conditions. The model is described by hydraulic model comprising of a load sensing pump, a flow sharing valve model and a 2D kinematic model to simulate the excavator front excavation tool. This approach has enabled the study of the dynamic behavior and interaction of the pump and valve with a completely developed kinematic model of the excavator. The detailed hydraulic model described regard a load sensing flow sharing valve block, composed by two valve sections model working at the same time. The mathematical model of the valve has been validated against experimental results in different conditions: standard operating without flow saturation and flow sharing condition, i.e. with flow saturation. The pump and valve models and their verification, as represented in this paper, offer a great deal of confidence in the individual models capabilities of recreating the functioning of an excavator. The last section of the paper provides an overall view of the hydraulic model capability coupled with the kinematics of the system, with the simulation of an arm-bucket movement. The results presented show the paramount of advantages that this model possess in aiding a pump and valve designers in analyzing/assessing the behavior of the components as a part of a complex system. The mathematical model of the excavator could be useful in future study of both new control system and new energy saving solutions.
Acknowledgments
The authors would like to acknowledge the active support of this research by Casappa S.p.A., and Walvoil S.p.A (ITALY).
Nomenclature
A flow area [m2] Cd discharge coefficient -
i volume index -
mass flow rate [kg/s ]
p pressure [bar]
V volume [m3]
t time [s]
Greek Letters
β bulk modulus [Pa]
ρ density [kg/m3]
Acronyms
FC Flow compensator PC Pressure compensator
PS System Pressure
PLS Load Sensed Pressure
References
[1] JCMAS H 020 – Earth Moving machinery – Test methods for energy consumption – Hydraulic excavators, 2010.
[2] J Ivantysyn , M Ivantysynova. Hydrostatic Pumps and Motors, Tech Books International, New Delhi,2003, India. ISBN 81-88305-08-
[3] Blakburn J. F., Reethof G. & Shearer J. L. (1966) “Fluid Power Control”. USA: MIT Press, 1966. ISBN 0262520044
[4] P. Casoli, A. Anthony (2013) “Gray box modeling of an excavator’s variable displacement hydraulic pump for fast simulation of excavation cycles” Control Engineering Practice 21 (2013) pp.483-494. Elsevier Ltd. http:/dx.doi.org/10.1016/j.conengprac.2012.11.011
[5] LMS Imagine – AMESim® Reference manual 2011
[6] Shih-Tin Lin, Jiann-Nan Huang. (2002) .Stabilization of Baumgarte’s Method Using the Runge-Kutta Approach. In ASME Journal of Mechanical Design, vol. 124, n.4, pp. 633-641. December 2002.
[7] Grzesikiewicz, W. (1998). Dynamics of a ground digging tool. XI scientific Conference Problems of Work Machines, konferencja Naukova Problem Maszyn Roboczych) Polska: Zakopane, 1998.
[8] P. Casoli, A. Anthony, L. Riccò (2012) “Modeling of an Excavator System – Load sensing flow sharing valve model” SAE 2012 Commercial Vehicle Engineering Congress, Rosemont, Illinois, USA, 13-14 September 2012. doi:10.4271/2012-01-2042H
[9] E Merritt. Hydraulic Control Systems. John Wileys and Sons, Cincinnati, Ohio, 1967. ISBN 0-471-59617-5.
[10] McCloy, D., Martin, H. M. (1973). “The control of Fluid Power”, Longman, London, 1973.
63