Modeling and Analysis of Dynamic Systems - ETH Z and Analysis of Dynamic Systems Dr. Guillaume...
57
Modeling and Analysis of Dynamic Systems Dr. Guillaume Ducard Fall 2017 Institute for Dynamic Systems and Control ETH Zurich, Switzerland G. Ducard c 1 / 57
Transcript of Modeling and Analysis of Dynamic Systems - ETH Z and Analysis of Dynamic Systems Dr. Guillaume...

Modeling and Analysis of Dynamic Systems
Dr. Guillaume Ducard
Fall 2017
Institute for Dynamic Systems and Control
ETH Zurich, Switzerland
G. Ducard c© 1 / 57

Outline
1 Lecture 13: Linear System - Stability AnalysisZero Dynamics: DefinitionsZero Dynamics: AnalysisExample and Summary
2 Lecture 13: Nonlinear Systems - IntroductionDefinitionsEquilibrium Sets
3 Lecture 13: Nonlinear Systems - First & Second OrderFirst-order SystemsSecond-order SystemsLyapunov PrincipleLyapunov Theory
G. Ducard c© 2 / 57

Lecture 13: Linear System - Stability AnalysisLecture 13: Nonlinear Systems - Introduction
Lecture 13: Nonlinear Systems - First & Second Order
Zero Dynamics: DefinitionsZero Dynamics: AnalysisExample and Summary
Outline
1 Lecture 13: Linear System - Stability AnalysisZero Dynamics: DefinitionsZero Dynamics: AnalysisExample and Summary
2 Lecture 13: Nonlinear Systems - IntroductionDefinitionsEquilibrium Sets
3 Lecture 13: Nonlinear Systems - First & Second OrderFirst-order SystemsSecond-order SystemsLyapunov PrincipleLyapunov Theory
G. Ducard c© 3 / 57

Lecture 13: Linear System - Stability AnalysisLecture 13: Nonlinear Systems - Introduction
Lecture 13: Nonlinear Systems - First & Second Order
Zero Dynamics: DefinitionsZero Dynamics: AnalysisExample and Summary
Zero Dynamics
The dynamic behavior of linear system described as
ddtx(t) = x(t) = Ax(t) +Bu(t)
y(t) = Cx(t) +Du(t)
can be studied through its poles (eigenvalues of A) for the stabilityof the state vector x. See previous lecture.Let’s consider the dynamic behavior when the output equation isconsidered y(t) through the output matrix C.
In the Laplace domain, the relationship between input and outputcan be represented by a transfer function matrix:
P (s) = C · [s I −A]−1 ·B +DG. Ducard c© 4 / 57

Lecture 13: Linear System - Stability AnalysisLecture 13: Nonlinear Systems - Introduction
Lecture 13: Nonlinear Systems - First & Second Order
Zero Dynamics: DefinitionsZero Dynamics: AnalysisExample and Summary
SISO Case: Transfer Function
In the SISO case, the transfer function matrix:
P (s) = C · [s I −A]−1 ·B +D
is a scalar rational transfer function which can always be written inthe following form
P (s) =Y (s)
U(s)= k
sn−r + bn−r−1sn−r−1 + . . .+ b1s+ b0
sn + an−1sn−1 + an−2sn−2 + . . .+ a2s2 + a1s+ a0
G. Ducard c© 5 / 57

Lecture 13: Linear System - Stability AnalysisLecture 13: Nonlinear Systems - Introduction
Lecture 13: Nonlinear Systems - First & Second Order
Zero Dynamics: DefinitionsZero Dynamics: AnalysisExample and Summary
SISO Case: Transfer Function
P (s) =Y (s)
U(s)= k
sn−r + bn−r−1sn−r−1 + . . .+ b1s+ b0
sn + an−1sn−1 + an−2sn−2 + . . .+ a2s2 + a1s+ a0
Discussions:
The order of the highest power of s is n.
Input gain: k
The relative degree r:
difference between highest power of s at denominator and thehighest power of s at numerator.r plays an important role in the discussion of system zeros.
A dynamic system can possess - not only poles - but also zeros.Question: What is the influence of the zeros?
G. Ducard c© 6 / 57

Lecture 13: Linear System - Stability AnalysisLecture 13: Nonlinear Systems - Introduction
Lecture 13: Nonlinear Systems - First & Second Order
Zero Dynamics: DefinitionsZero Dynamics: AnalysisExample and Summary
There is an equivalence between the transfer function
P (s) =Y (s)
U(s)= k
sn−r + bn−r−1sn−r−1 + . . .+ b1s+ b0
sn + an−1sn−1 + an−2sn−2 + . . .+ a2s2 + a1s+ a0
and its state-space representation (controller canonical form).
d
dtx(t) =
0 1 0 . . . 00 0 1 . . . 0· · · · ·0 0 0 . . . 1
−a0 −a1 −a2 . . . −an−1
x(t) +
00·0k
u(t)
y(t) = [ b0 . . . bn−r−1 1 0 . . . 0 ] x(t) = Cx(t)
The state vector is x(t) =[x(t) x(t) x(t) . . . x(n)(t)
]
Controller canonical form with gain k (min. number of parameters)
The terms involved in the numerator are those of the C outputvector (“transmission zeros”).
G. Ducard c© 7 / 57

Lecture 13: Linear System - Stability AnalysisLecture 13: Nonlinear Systems - Introduction
Lecture 13: Nonlinear Systems - First & Second Order
Zero Dynamics: DefinitionsZero Dynamics: AnalysisExample and Summary
Zero Dynamics - Definition
The Zero Dynamics of a system:
corresponds to its behavior for those special
non-zero inputs u∗(t)
and initial conditions x∗
for which its output y(t) is identical to zero for a finite interval.
1 Study of the influence of the zeroson the dynamic properties of the system.
2 Study of the “internal dynamics”:analyze the stability of the system states, which are not directlycontrolled by the input u(t).
G. Ducard c© 8 / 57

Lecture 13: Linear System - Stability AnalysisLecture 13: Nonlinear Systems - Introduction
Lecture 13: Nonlinear Systems - First & Second Order
Zero Dynamics: DefinitionsZero Dynamics: AnalysisExample and Summary
Zero Dynamics - Problem
In all the reference-tracking control problems, the controller triesto force the error to zero.
ǫ = yref − y
If yref = 0, then y(t) is to be zero for all times, ⇒ all itsderivatives are to be zero as well.
If a plant has internal dynamics, which are unstable, but not visibleat the system’s output, problems are to be expected.
Let’s see the form of the derivatives.
G. Ducard c© 9 / 57

Lecture 13: Linear System - Stability AnalysisLecture 13: Nonlinear Systems - Introduction
Lecture 13: Nonlinear Systems - First & Second Order
Zero Dynamics: DefinitionsZero Dynamics: AnalysisExample and Summary
The relative degree r
is the number of differentiations needed to have the input u(t)explicitly appear in the “output” y(r)(t)
y(t) = Cx(t),
y(t) = Cx(t) = CAx(t) +CBu(t) = CAx(t),
...
y(r−1)(t) =d
dty(r−2)(t) = CAr−1x(t) +CAr−2Bu(t) = CAr−1x(t),
y(r)(t) =d
dty(r−1)(t) = CArx(t) +CAr−1Bu(t) = CArx(t) + ku(t)
where k 6= 0 and r ≤ n.G. Ducard c© 10 / 57

Lecture 13: Linear System - Stability AnalysisLecture 13: Nonlinear Systems - Introduction
Lecture 13: Nonlinear Systems - First & Second Order
Zero Dynamics: DefinitionsZero Dynamics: AnalysisExample and Summary
The relative degree r
z1 = y = Cx = [b0x1 + b1x2 + . . .+ bn−r−1xn−r + xn−r+1]
z2 = y = CAx = [b0x2 + b1x3 + . . .+ bn−r−1xn−r+1 + xn−r+2]
...
zr = y(r−1) = CAr−1x = [b0xr + b1xr+1 + . . .+ bn−r−1xn−1 + xn]
y(r) = CArx+ ku = [b0xr+1 + b1xr+2 + . . .+ bn−rxn + xn]
xn is found from the state-space representation:
d
dtx(t) =
0 1 0 . . . 00 0 1 . . . 0· · · · ·0 0 0 . . . 1
−a0 −a1 −a2 . . . −an−1
x(t) +
00·0k
u(t)
G. Ducard c© 11 / 57

Lecture 13: Linear System - Stability AnalysisLecture 13: Nonlinear Systems - Introduction
Lecture 13: Nonlinear Systems - First & Second Order
Zero Dynamics: DefinitionsZero Dynamics: AnalysisExample and Summary
Outline
1 Lecture 13: Linear System - Stability AnalysisZero Dynamics: DefinitionsZero Dynamics: AnalysisExample and Summary
2 Lecture 13: Nonlinear Systems - IntroductionDefinitionsEquilibrium Sets
3 Lecture 13: Nonlinear Systems - First & Second OrderFirst-order SystemsSecond-order SystemsLyapunov PrincipleLyapunov Theory
G. Ducard c© 12 / 57

Lecture 13: Linear System - Stability AnalysisLecture 13: Nonlinear Systems - Introduction
Lecture 13: Nonlinear Systems - First & Second Order
Zero Dynamics: DefinitionsZero Dynamics: AnalysisExample and Summary
Zero Dynamics: Analysis Formulation
The following coordinate transformation z = Φx is introduced
z1 = y = Cx = [b0x1 + b1x2 + . . .+ bn−r−1xn−r + xn−r+1]
z2 = y = CAx = [b0x2 + b1x3 + . . .+ bn−r−1xn−r+1 + xn−r+2]
...
zr = y(r−1) = CAr−1x = [b0xr + b1xr+1 + . . .+ bn−r−1xn−1 + xn]
G. Ducard c© 13 / 57

Lecture 13: Linear System - Stability AnalysisLecture 13: Nonlinear Systems - Introduction
Lecture 13: Nonlinear Systems - First & Second Order
Zero Dynamics: DefinitionsZero Dynamics: AnalysisExample and Summary
Zero Dynamics: Analysis Formulation
The remaining n− r coordinates are chosen such that the transformationΦ is regular and such that their derivatives also do not depend on theinput u. Obviously the choice
zr+1 = x1
zr+2 = x2
. . .
zn = xn−r
satisfies both requirements.To simplify notation the vector z is partitioned into two subvectors
z =
[ξ
η
], ξ =
z1. . .zr
, η =
zr+1
. . .zn
G. Ducard c© 14 / 57

Lecture 13: Linear System - Stability AnalysisLecture 13: Nonlinear Systems - Introduction
Lecture 13: Nonlinear Systems - First & Second Order
Zero Dynamics: DefinitionsZero Dynamics: AnalysisExample and Summary
Zero Dynamics: Analysis Formulation
In the new coordinates the system has the form
[ξ
η
]=
0 1 0 . . . 00 0 1 . . . 00 . . . . . . 0 1
− − rT − −
0 . . . . . . . . . 00 . . . . . . . . . 00 . . . . . . . . . 0
− − sT − −
0 . . . . . . . . . 00 . . . . . . . . . 00 . . . . . . . . . 0
− − pT − −
0 1 0 . . . 00 0 1 . . . 00 . . . . . . 0 1
− − qT − −
[ξ
η
]+
0. . .
0k
0. . .
. . .
0
u
and obviously y = z1 = ξ(1).In order to have an identically vanishing output it is therefore necessaryand sufficient to choose the following control and initial conditions
ξ∗ = 0, u∗(t) = −1
ksT η∗(t)
where the initial condition η∗0 6= 0 can be chosen arbitrarily.
G. Ducard c© 15 / 57

Lecture 13: Linear System - Stability AnalysisLecture 13: Nonlinear Systems - Introduction
Lecture 13: Nonlinear Systems - First & Second Order
Zero Dynamics: DefinitionsZero Dynamics: AnalysisExample and Summary
Zero Dynamics: Analysis Formulation
The internal states (zero dynamics states) evolve according to theequation
d
dtη(t) =
0 1 0 . . . 00 0 1 . . . 00 . . . . . . 0 1− − qT − −
η∗(t) = Qη∗(t), η∗(0) = η∗0
Minimum phase system
If the matrix Q is asymptotically stable (all eigenvalues withnegative real part) ⇒ then the system is minimum phase.
Equivalence: a minimum phase system, is a system whose zeroshave all negative real parts.
These two definitions are consistent: see definition of the vector qT
qT = [−b0, −b1, . . . , −bn−r−2, −bn−r−1]G. Ducard c© 16 / 57

Lecture 13: Linear System - Stability AnalysisLecture 13: Nonlinear Systems - Introduction
Lecture 13: Nonlinear Systems - First & Second Order
Zero Dynamics: DefinitionsZero Dynamics: AnalysisExample and Summary
Unstable Zero dynamics
As soon as there is a zero with positive real part:
system is non-minimum phase,
system has its zero dynamics unstable,
its internal states η can diverge without y(t) being affected.
Consequences:
the input u(t) may not be chosen such that the output y(t) is(almost) zero before the states η associated with the zero dynamicsare (almost) zero.
Feedback control more difficult to design.
This imposes a constraint of the bandwidth of the closed-loopsystem:⇒ significantly slower than the “slowest” non-minimum phase zero.
G. Ducard c© 17 / 57

Lecture 13: Linear System - Stability AnalysisLecture 13: Nonlinear Systems - Introduction
Lecture 13: Nonlinear Systems - First & Second Order
Zero Dynamics: DefinitionsZero Dynamics: AnalysisExample and Summary
Zero Dynamics: Analysis Formulation
This equation can be derived using the definition of zn, the originalsystem equation, the definition of z1 (1), again the coordinatetransformation,
zn = xn−r
= xn−r+1
= z1 − b0x1 . . .− bn−r−1xn−r
= z1 − b0zr+1 . . .− bn−r−1zn
= z1 + qT η
Therefore, the eigenvalues of Q coincide with the transmissionzeros of the original system and with the roots of the numerator ofits transfer function.
G. Ducard c© 18 / 57

Lecture 13: Linear System - Stability AnalysisLecture 13: Nonlinear Systems - Introduction
Lecture 13: Nonlinear Systems - First & Second Order
Zero Dynamics: DefinitionsZero Dynamics: AnalysisExample and Summary
Zero Dynamics: Analysis Formulation
∫∫∫
∫∫∫ ηn−r−1 η1sT
qT
k
u
ξr ξr−1 ξ1 =
rT
pT
G. Ducard c© 19 / 57

Lecture 13: Linear System - Stability AnalysisLecture 13: Nonlinear Systems - Introduction
Lecture 13: Nonlinear Systems - First & Second Order
Zero Dynamics: DefinitionsZero Dynamics: AnalysisExample and Summary
Outline
1 Lecture 13: Linear System - Stability AnalysisZero Dynamics: DefinitionsZero Dynamics: AnalysisExample and Summary
2 Lecture 13: Nonlinear Systems - IntroductionDefinitionsEquilibrium Sets
3 Lecture 13: Nonlinear Systems - First & Second OrderFirst-order SystemsSecond-order SystemsLyapunov PrincipleLyapunov Theory
G. Ducard c© 20 / 57

Lecture 13: Linear System - Stability AnalysisLecture 13: Nonlinear Systems - Introduction
Lecture 13: Nonlinear Systems - First & Second Order
Zero Dynamics: DefinitionsZero Dynamics: AnalysisExample and Summary
Zero Dynamics Analysis on a Small SISO System
P (s) =Y (s)
U(s)= k
s2 + b1s+ b0s4 + a3s3 + a2s2 + a1s+ a0
Step 1: Convert the plant’s transfer function into a state-spacecontroller canonical form
number of states n = 4, relative degree r = 2.
d
dtx(t) =
0 1 0 00 0 1 00 0 0 1
−a0 −a1 −a2 −a3
· x(t) +
000k
· u(t)
y(t) = [ b0 b1 1 0 ] · x(t) + [ 0 ] · u(t)G. Ducard c© 21 / 57

Lecture 13: Linear System - Stability AnalysisLecture 13: Nonlinear Systems - Introduction
Lecture 13: Nonlinear Systems - First & Second Order
Zero Dynamics: DefinitionsZero Dynamics: AnalysisExample and Summary
Step 2: Coordinate transformation
Relative degree r = 2, therefore
y(t) = b0x1(t) + b1x2(t) + x3(t)
y(t) = b0x2(t) + b1x3(t) + x4(t)
y(t) = −a0x1(t)− a1x2(t) + (b0 − a2)x3(t) + (b1 − a3)x4(t) + k u(t)
The coordinate transformation z = Φ−1 · x has the form
z1 = y = b0x1 + b1x2 + x3
z2 = y = b0x2 + b1x3 + x4
z3 = x1
z4 = x2
G. Ducard c© 22 / 57

Lecture 13: Linear System - Stability AnalysisLecture 13: Nonlinear Systems - Introduction
Lecture 13: Nonlinear Systems - First & Second Order
Zero Dynamics: DefinitionsZero Dynamics: AnalysisExample and Summary
Step 3: Find the transformation matrices Φ−1, such that z = Φ−1 · x
and then compute Φ
Φ−1 =
b0 b1 1 0
0 b0 b1 1
1 0 0 0
0 1 0 0
and
Φ =
0 0 1 0
0 0 0 1
1 0 −b0 −b1
−b1 1 b0 b1 b21 − b0
Remark: Notice that, by construction, det(Φ) = det(Φ−1) = 1G. Ducard c© 23 / 57

Lecture 13: Linear System - Stability AnalysisLecture 13: Nonlinear Systems - Introduction
Lecture 13: Nonlinear Systems - First & Second Order
Zero Dynamics: DefinitionsZero Dynamics: AnalysisExample and Summary
Step 4: Build a new state-space representation in z =
[ξ
η
]
ξ =
[z1z2
], η =
[z3z4
]
in the new coordinates the system
d
dtz(t) = Φ
−1AΦ z(t) +Φ−1B u(t), y(t) = C Φ z (t)
d
dt
ξ1(t)
ξ2(t)
η1(t)
η2(t)
=
0 1 0 0
r1 r2 s1 s2
0 0 0 1
1 0 −b0 −b1
·
ξ1(t)
ξ2(t)
η1(t)
η2(t)
+
0
k
0
0
· u(t)
G. Ducard c© 24 / 57

Lecture 13: Linear System - Stability AnalysisLecture 13: Nonlinear Systems - Introduction
Lecture 13: Nonlinear Systems - First & Second Order
Zero Dynamics: DefinitionsZero Dynamics: AnalysisExample and Summary
The coefficients r1, r2, s1, s2 are listed below
r1 = b0 − a2 − b1(b1 − a3)
r2 = b1 − a3
s1 = b0 b1(b1 − a3)− a0 − b0(b0 − a2)
s2 = (b1 − a3)(b21 − b0)− a1 − (b0 − a2)b1
G. Ducard c© 25 / 57

Lecture 13: Linear System - Stability AnalysisLecture 13: Nonlinear Systems - Introduction
Lecture 13: Nonlinear Systems - First & Second Order
Zero Dynamics: DefinitionsZero Dynamics: AnalysisExample and Summary
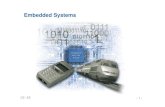
∫∫∫∫ η2 η1 s1
s2
r1
r2
−b0
−b1
k
u
ξ1ξ2
Figure: System structure of the example’s zero dynamics.
G. Ducard c© 26 / 57

Lecture 13: Linear System - Stability AnalysisLecture 13: Nonlinear Systems - Introduction
Lecture 13: Nonlinear Systems - First & Second Order
Zero Dynamics: DefinitionsZero Dynamics: AnalysisExample and Summary
Step 5: Study the submatrix Q of A = Φ−1AΦ corresponding to the
zero-dynamics vector η
Choosing the following initial conditions ξ∗1(0) = ξ∗2(0) = 0 and controlsignal u∗(t) = − 1
k[s1η
∗
1(t) + s2η∗
2(t)] yields a zero output y(t) = 0 for allt ≥ 0. The initial conditions η∗1(0) 6= 0 and η∗2(0) 6= 0 may be chosenarbitrarily.
The trajectories of state variables η1(t) and η2(t), in this case, aredefined by the equations
d
dtη∗(t) =
[0 1
−b0 −b1
]· η∗(t) = Q · η∗(t)
G. Ducard c© 27 / 57

Lecture 13: Linear System - Stability AnalysisLecture 13: Nonlinear Systems - Introduction
Lecture 13: Nonlinear Systems - First & Second Order
Zero Dynamics: DefinitionsZero Dynamics: AnalysisExample and Summary
Step 6: Conclude on the conditions to have Q asymptotically stable
d
dtη∗(t) =
[0 1
−b0 −b1
]· η∗(t) = Q · η∗(t)
G. Ducard c© 28 / 57

Lecture 13: Linear System - Stability AnalysisLecture 13: Nonlinear Systems - Introduction
Lecture 13: Nonlinear Systems - First & Second Order
DefinitionsEquilibrium Sets
Outline
1 Lecture 13: Linear System - Stability AnalysisZero Dynamics: DefinitionsZero Dynamics: AnalysisExample and Summary
2 Lecture 13: Nonlinear Systems - IntroductionDefinitionsEquilibrium Sets
3 Lecture 13: Nonlinear Systems - First & Second OrderFirst-order SystemsSecond-order SystemsLyapunov PrincipleLyapunov Theory
G. Ducard c© 29 / 57

Lecture 13: Linear System - Stability AnalysisLecture 13: Nonlinear Systems - Introduction
Lecture 13: Nonlinear Systems - First & Second Order
DefinitionsEquilibrium Sets
Lyapunov Stability
Nonlinear differential equation
d
dtx(t) = f(x(t), u(t), t), x(t0) = x0 6= 0 (1)
Equilibrium xe
is such that f(xe, t) = 0, ∀ t.
G. Ducard c© 30 / 57

Lecture 13: Linear System - Stability AnalysisLecture 13: Nonlinear Systems - Introduction
Lecture 13: Nonlinear Systems - First & Second Order
DefinitionsEquilibrium Sets
Stability of Equilibrium Points
The point xe is Uniformly Lyapunov Stable (ULS)
if for each scalar R > 0, there is a scalar r(R) > 0,such that if the initial condition x0 satisfies
||x0|| < r, (2)
the corresponding solution of (1) will satisfy the condition
||x(t)|| < R (3)
for all times t greater than t0.
Remark: The notion “uniformly” indicates that neither r not Rdepend on t0.
G. Ducard c© 31 / 57

Lecture 13: Linear System - Stability AnalysisLecture 13: Nonlinear Systems - Introduction
Lecture 13: Nonlinear Systems - First & Second Order
DefinitionsEquilibrium Sets
Lyapunov Stability
For isolated equilibrium points: Lyapunov stability is
the most useful stability concept.
always connected to an equilibrium point xe of a system.
The same point xe is asymptotically stable
if it is ULS and attractive, i.e.
limt→∞
x(t) = xe
G. Ducard c© 32 / 57

Lecture 13: Linear System - Stability AnalysisLecture 13: Nonlinear Systems - Introduction
Lecture 13: Nonlinear Systems - First & Second Order
DefinitionsEquilibrium Sets
Lyapunov Stability
A system is exponentially asymptotically stable
if there exist constant scalars a > 0 and b > 0 such that
||x(t)|| ≤ a · e−b·(t−t0) · ||x0||
Remarks:
1 In general, only an exponentially asymptotically stableequilibrium is acceptable for technical applications,
2 ⇒ this form of stability is “robust” with respect to modelingerrors.
G. Ducard c© 33 / 57

Lecture 13: Linear System - Stability AnalysisLecture 13: Nonlinear Systems - Introduction
Lecture 13: Nonlinear Systems - First & Second Order
DefinitionsEquilibrium Sets
Outline
1 Lecture 13: Linear System - Stability AnalysisZero Dynamics: DefinitionsZero Dynamics: AnalysisExample and Summary
2 Lecture 13: Nonlinear Systems - IntroductionDefinitionsEquilibrium Sets
3 Lecture 13: Nonlinear Systems - First & Second OrderFirst-order SystemsSecond-order SystemsLyapunov PrincipleLyapunov Theory
G. Ducard c© 34 / 57

Lecture 13: Linear System - Stability AnalysisLecture 13: Nonlinear Systems - Introduction
Lecture 13: Nonlinear Systems - First & Second Order
DefinitionsEquilibrium Sets
Equilibrium Sets
For linear systems an equilibrium set can be:
one isolated point;
entire subspaces;
periodic orbits (same frequency but arbitrary amplitude).
G. Ducard c© 35 / 57

Lecture 13: Linear System - Stability AnalysisLecture 13: Nonlinear Systems - Introduction
Lecture 13: Nonlinear Systems - First & Second Order
DefinitionsEquilibrium Sets
Equilibrium Sets
Nonlinear systems can have (infinitely) many isolated equilibriumpoints.An equilibrium point can:
have a finite region of attraction;
be non-exponentially asymptotically stable; and
be unstable ⇒ the state of the system can “escape toinfinity” in finite time.
G. Ducard c© 36 / 57

Lecture 13: Linear System - Stability AnalysisLecture 13: Nonlinear Systems - Introduction
Lecture 13: Nonlinear Systems - First & Second Order
First-order SystemsSecond-order SystemsLyapunov PrincipleLyapunov Theory
Outline
1 Lecture 13: Linear System - Stability AnalysisZero Dynamics: DefinitionsZero Dynamics: AnalysisExample and Summary
2 Lecture 13: Nonlinear Systems - IntroductionDefinitionsEquilibrium Sets
3 Lecture 13: Nonlinear Systems - First & Second OrderFirst-order SystemsSecond-order SystemsLyapunov PrincipleLyapunov Theory
G. Ducard c© 37 / 57

Lecture 13: Linear System - Stability AnalysisLecture 13: Nonlinear Systems - Introduction
Lecture 13: Nonlinear Systems - First & Second Order
First-order SystemsSecond-order SystemsLyapunov PrincipleLyapunov Theory
Stability of Nonlinear First-Order Systems
First-order nonlinear systems are easy
d
dtx(t) = f(x(t), u(t)), x, u ∈ R
because they can be separated for u(t) = 0
∫dx
f(x)=
∫dt = t+ c
The constant c is needed to satisfy the initial condition x(t0) = x0.
G. Ducard c© 38 / 57

Lecture 13: Linear System - Stability AnalysisLecture 13: Nonlinear Systems - Introduction
Lecture 13: Nonlinear Systems - First & Second Order
First-order SystemsSecond-order SystemsLyapunov PrincipleLyapunov Theory
Example: Non-Exponential Asymptotic Stability
System
d
dtx(t) = −x3(t) + u(t), x(0) = x0
Explicit solution for u(t) = 0∫
dx
−x3=
∫dt ⇒
1
2x2= t+ c
and, thereforex(t) = x0 · (2 · t · x
20 + 1)−1/2
⇒ Therefore, the system is asymptotically stable.
G. Ducard c© 39 / 57

Lecture 13: Linear System - Stability AnalysisLecture 13: Nonlinear Systems - Introduction
Lecture 13: Nonlinear Systems - First & Second Order
First-order SystemsSecond-order SystemsLyapunov PrincipleLyapunov Theory
Example: Non-Exponential Asymptotic Stability
But the solution approaches the equilibrium slower thanexponentially.
To see this use the inequality
||x(t)|| = ||x0|| · (2 · t · x20 + 1)−1/2 ≤ a · e−b t · ||x0||
which yields1 ≤ a · e−b t · (2 · t · x20 + 1)1/2
For lim t → ∞, the right-hand side of this inequality tends to 0 forall possible 0 < a, b < ∞.Contradiction! ⇒ No exponential asymptotic stability.
G. Ducard c© 40 / 57

Lecture 13: Linear System - Stability AnalysisLecture 13: Nonlinear Systems - Introduction
Lecture 13: Nonlinear Systems - First & Second Order
First-order SystemsSecond-order SystemsLyapunov PrincipleLyapunov Theory
Outline
1 Lecture 13: Linear System - Stability AnalysisZero Dynamics: DefinitionsZero Dynamics: AnalysisExample and Summary
2 Lecture 13: Nonlinear Systems - IntroductionDefinitionsEquilibrium Sets
3 Lecture 13: Nonlinear Systems - First & Second OrderFirst-order SystemsSecond-order SystemsLyapunov PrincipleLyapunov Theory
G. Ducard c© 41 / 57

Lecture 13: Linear System - Stability AnalysisLecture 13: Nonlinear Systems - Introduction
Lecture 13: Nonlinear Systems - First & Second Order
First-order SystemsSecond-order SystemsLyapunov PrincipleLyapunov Theory
Stability of Second-Order Systems
Two variables involved: x1 and x2
ddtx1(t) = f1(x1, x2), x1(0) = x1,0
ddtx2(t) = f2(x1, x2), x2(0) = x2,0
(4)
G. Ducard c© 42 / 57

Lecture 13: Linear System - Stability AnalysisLecture 13: Nonlinear Systems - Introduction
Lecture 13: Nonlinear Systems - First & Second Order
First-order SystemsSecond-order SystemsLyapunov PrincipleLyapunov Theory
Taylor expansion
ddtx1(t) = a11x1(t) + a12x2(t) + f1(x1, x2), x1(0) = x1,0
ddtx2(t) = a21x1(t) + a22x2(t) + f2(x1, x2), x2(0) = x2,0
ai,j =∂fi∂xj
, i, j = 1, 2 lim||x||→0
fi(x1, x2)
||x||= 0
A2×2 =
[a11 a12
a21 a22
]
Linear system is given by:
d
dtδx(t) = A · δx(t), δx(t) = [δx1(t), δx2(t)]
T (5)
G. Ducard c© 43 / 57

Lecture 13: Linear System - Stability AnalysisLecture 13: Nonlinear Systems - Introduction
Lecture 13: Nonlinear Systems - First & Second Order
First-order SystemsSecond-order SystemsLyapunov PrincipleLyapunov Theory
Outline
1 Lecture 13: Linear System - Stability AnalysisZero Dynamics: DefinitionsZero Dynamics: AnalysisExample and Summary
2 Lecture 13: Nonlinear Systems - IntroductionDefinitionsEquilibrium Sets
3 Lecture 13: Nonlinear Systems - First & Second OrderFirst-order SystemsSecond-order SystemsLyapunov PrincipleLyapunov Theory
G. Ducard c© 44 / 57

Lecture 13: Linear System - Stability AnalysisLecture 13: Nonlinear Systems - Introduction
Lecture 13: Nonlinear Systems - First & Second Order
First-order SystemsSecond-order SystemsLyapunov PrincipleLyapunov Theory
Lyapunov Principle – 2nd-Order SystemsExcluding the case where the matrix A has two eigenvalues withzero real part, the local behavior of
the nonlinear system (4)
and the behavior of the linear system (5)
are topologically equivalent (i.e., they have the same “geometriccharacteristics”).
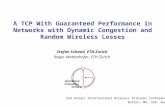
eigenvalues linearized system nonlinear system
λ1 ∈ C−, λ2 ∈ C− Stable Focus Stable Focusλ1 ∈ R−, λ2 ∈ R− Stable Node Stable Nodeλ1 ∈ R+, λ2 ∈ R− Saddle Saddleλ1 ∈ R+, λ2 ∈ R+ Unstable Node Unstable Nodeλ1 ∈ C+, λ2 ∈ C+ Unstable Focus Unstable FocusRe(λ1,2) = 0 Center ? ? ?
G. Ducard c© 45 / 57

Lecture 13: Linear System - Stability AnalysisLecture 13: Nonlinear Systems - Introduction
Lecture 13: Nonlinear Systems - First & Second Order
First-order SystemsSecond-order SystemsLyapunov PrincipleLyapunov Theory
-1-1-1
-1-1-1
000
000
111
111
-1-1-1
-1-1-1
-0.5-0.5-0.5
-0.5-0.5-0.5
000
000
0.50.50.5
0.50.50.5
111
111
x1x1x1
x1x1x1
x2
x2
x2
x2
x2
x2
Stable Focus Stable Node Saddle
Unstable Node Unstable Focus Center
G. Ducard c© 46 / 57

Lecture 13: Linear System - Stability AnalysisLecture 13: Nonlinear Systems - Introduction
Lecture 13: Nonlinear Systems - First & Second Order
First-order SystemsSecond-order SystemsLyapunov PrincipleLyapunov Theory
Example Critical Nonlinear System
ddtx1 = −x1 + x2
ddtx2 = x32
System has only one isolated equilibrium at xe,1 = xe,2 = 0.
Linearization has one eigenvalue at −1 and one at 0.
Observations:
The solution of the linear system is stable (although notasymptotically stable),while the nonlinear system is unstable (it has even finiteescape times).
x2(t) =x2,0√
1− 2 t x22,0
With lim t → 1/(2x22,0) ⇒ x2(t) → “escapes to infinity.”G. Ducard c© 47 / 57

Lecture 13: Linear System - Stability AnalysisLecture 13: Nonlinear Systems - Introduction
Lecture 13: Nonlinear Systems - First & Second Order
First-order SystemsSecond-order SystemsLyapunov PrincipleLyapunov Theory
Lyapunov Principle – General Systems
1 The Lyapunov Principle is valid for all finite-order systems: aslong as the linearized system has no eigenvalues on theimaginary axis,
2 The local stability properties of an arbitrary-order nonlinearsystem are fully understood once the eigenvalues of thelinearization are known.
3 Particularly, if the linearization of a nonlinear system aroundan isolated equilibrium point xe is asymptotically stable(unstable resp.), then this equilibrium is an asymptoticallystable (unstable resp.) equilibrium of the nonlinear system aswell.
G. Ducard c© 48 / 57

Lecture 13: Linear System - Stability AnalysisLecture 13: Nonlinear Systems - Introduction
Lecture 13: Nonlinear Systems - First & Second Order
First-order SystemsSecond-order SystemsLyapunov PrincipleLyapunov Theory
Lyapunov Principle – General Systems
Remarks:
1 Nothing is said about the “large signal behavior.”
2 In the critical case (Re{λi} = 0), the nonlinear system’sbehavior is not defined by its first-order approximation, but bythe higher-order terms f(x).
G. Ducard c© 49 / 57

Lecture 13: Linear System - Stability AnalysisLecture 13: Nonlinear Systems - Introduction
Lecture 13: Nonlinear Systems - First & Second Order
First-order SystemsSecond-order SystemsLyapunov PrincipleLyapunov Theory
Outline
1 Lecture 13: Linear System - Stability AnalysisZero Dynamics: DefinitionsZero Dynamics: AnalysisExample and Summary
2 Lecture 13: Nonlinear Systems - IntroductionDefinitionsEquilibrium Sets
3 Lecture 13: Nonlinear Systems - First & Second OrderFirst-order SystemsSecond-order SystemsLyapunov PrincipleLyapunov Theory
G. Ducard c© 50 / 57

Lecture 13: Linear System - Stability AnalysisLecture 13: Nonlinear Systems - Introduction
Lecture 13: Nonlinear Systems - First & Second Order
First-order SystemsSecond-order SystemsLyapunov PrincipleLyapunov Theory
Lyapunov Theory
Local stability properties of equilibrium x = 0 of system
x(t) = f(x(t)), x(0) 6= 0 (6)
fully described by
A =∂f
∂x
∣∣∣∣x=0
provided A has no eigenvalues with zero real part.If this is not true or if one is interested in non-local results for moregeneral systems, then use Lyapunov’s direct method.
G. Ducard c© 51 / 57

Lecture 13: Linear System - Stability AnalysisLecture 13: Nonlinear Systems - Introduction
Lecture 13: Nonlinear Systems - First & Second Order
First-order SystemsSecond-order SystemsLyapunov PrincipleLyapunov Theory
Definitions
A scalar function α(p) with α : R+ → R+ is a nondecreasingfunction if α(0) = 0 and α(p) ≥ α(q) ∀ p > q.
A function V : Rn+1 → R is a candidate global Lyapunov functionif
the function is strictly positive, i.e., V (x, t) > 0 ∀ x 6= 0, ∀ tand V (0) = 0; and
there are two nondecreasing functions α and β that satisfy theinequalities β(||x||) ≤ V (x, t) ≤ α(||x||).
Obviously, if these conditions are met only in a neighborhood ofthe equilibrium point x = 0 only local assertions can be made.
G. Ducard c© 52 / 57

Lecture 13: Linear System - Stability AnalysisLecture 13: Nonlinear Systems - Introduction
Lecture 13: Nonlinear Systems - First & Second Order
First-order SystemsSecond-order SystemsLyapunov PrincipleLyapunov Theory
Theorem 1
The system
x(t) = f(x(t), t), x(t0) = x0 6= 0
is globally/locally stable in the sense of Lyapunovif there is a global/local Lyapunov function candidate V (x, t) forwhich the following inequality holds true ∀x(t) 6= 0 and ∀ t
V (x(t), t) =∂V (x, t)
∂t+
∂V (x, t)
∂xf(x(t), t) ≤ 0
Theorem 2
The system (6) is globally/locally asymptotically stableif there is a global/local Lyapunov function candidate V (x, t) suchthat −V (x(t), t) satisfies all conditions of a global/local Lyapunovfunction candidate.
G. Ducard c© 53 / 57

Lecture 13: Linear System - Stability AnalysisLecture 13: Nonlinear Systems - Introduction
Lecture 13: Nonlinear Systems - First & Second Order
First-order SystemsSecond-order SystemsLyapunov PrincipleLyapunov Theory
In general, it is very difficult to find a suitable function V (x, t)Hint: use physical insight, Lyapunov functions can be seen asgeneralized energy functions.
Linear systems are simple
V (x) = xTPx
where P = P T > 0 is the solution of the Lyapunov equation
PA+ATP = −Q
For arbitrary Q = QT > 0, a solution to this equation exists iff Ais Hurwitz matrix.
Remark: Lyapunov theorems provide sufficient but not necessaryconditions. Many extension proposed (LaSalle, Hahn, etc.).
G. Ducard c© 54 / 57

Lecture 13: Linear System - Stability AnalysisLecture 13: Nonlinear Systems - Introduction
Lecture 13: Nonlinear Systems - First & Second Order
First-order SystemsSecond-order SystemsLyapunov PrincipleLyapunov Theory
Example
Systemddtx1 = x1(x
21 + x22 − 1)− x2
ddtx2 = x1 + x2(x
21 + x22 − 1)
(7)
One isolated equilibrium at x1 = x2 = 0. Linearizing the systemaround this equilibrium yields
A =
[−1 −1
1 −1
]
Eigenvalues are λ1,2 = −1± j, system is locally asymptoticallystable (Lyapunov principle).
G. Ducard c© 55 / 57

Lecture 13: Linear System - Stability AnalysisLecture 13: Nonlinear Systems - Introduction
Lecture 13: Nonlinear Systems - First & Second Order
First-order SystemsSecond-order SystemsLyapunov PrincipleLyapunov Theory
Example
System has a finite region of attraction. Use a Lyapunov analysisto obtain a conservative estimation of the region of attraction.
Candidate Lyapunov function
V (x) = x21 + x22
Time derivative of V along a trajectory of (7)
V (t) = 2(x21 + x22)(x21 + x22 − 1)
Therefore, at least the region ||x||2 = x21 + x22 < 1 must be part ofthe region of attraction.
G. Ducard c© 56 / 57

Lecture 13: Linear System - Stability AnalysisLecture 13: Nonlinear Systems - Introduction
Lecture 13: Nonlinear Systems - First & Second Order
First-order SystemsSecond-order SystemsLyapunov PrincipleLyapunov Theory
x1
x2
Vector field 0.1 · f(x), x=end point
-1.5 -1 -0.5 0 0.5 1 1.5
-1.5
-1
-0.5
0
0.5
1
1.5
G. Ducard c© 57 / 57