Modeling & Analysis of the International Space...
34
Modeling & Analysis Exercise Space Station Case Study K. Craig 1 Modeling & Analysis of the International Space Station
Transcript of Modeling & Analysis of the International Space...

Modeling & Analysis ExerciseSpace Station Case Study
K. Craig 1
Modeling & Analysisof the
International Space Station

Modeling & Analysis ExerciseSpace Station Case Study
K. Craig 2
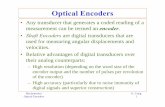
Physical System
Solar Alpha Rotary Joints

Modeling & Analysis ExerciseSpace Station Case Study
K. Craig 3
Physical System
SolarArray
SolarArray
OutboardBody
InboardBody
+x
StatorRotor
GearTrain

Modeling & Analysis ExerciseSpace Station Case Study
K. Craig 4
Physical System• SARJ allows controlled rotation about the x-axis and
constrains the other 5 DOF.• Mass moment of inertia of the inboard body is significantly
greater than the outboard body, so assume that the inboard body is mechanically grounded.
• Intermediate gear train inertia is small compared to the rotor inertia.
• Torsional flexibility of the gear train is important as is the torsional stiffness of the solar arrays.
• All system parameters are approximately constant over time.• Bearing friction and gear-train backlash can be neglected.• Environment noise can be neglected except for plume loads.

Modeling & Analysis ExerciseSpace Station Case Study
K. Craig 5
Motivation
Boss says design a system to keep the solar arrays pointed towards the sun as the station orbits the earth!
How do you do that? What do you do first?
Given:• physical dimensions of the station• motor• drive train

Modeling & Analysis ExerciseSpace Station Case Study
K. Craig 6
What Are the Steps You Take?Understand the
Physical System
Develop aMathematical Model
Predict theDynamic Behavior
Develop aPhysical Model

Modeling & Analysis ExerciseSpace Station Case Study
K. Craig 7
Physical Model
Vin
+
-
R L
im+
-
eb
Stator
Rotor
Statormechanically
grounded
Jm
JsaJobN:1Gear Ratio
K1 K2
B2B1
+x
′θθm θθob θθsa
θθm
Td

Modeling & Analysis ExerciseSpace Station Case Study
K. Craig 8
Parameters inPhysical Model
Symbol Meaning UnitsV
ininput voltage to armature volts
im armature current ampsR motor resistance ohmsL motor inductance henryseb back emf voltage voltsK
tmotor torque constant ft-lb/amp
Ke back emf constant volts-sec/radN gear ratio unitlessJm motor inertia slug-ft
2
θm motor position rad′θm motor position reflected through gear train rad
Job
outboard truss inertia slug-ft2
θob outboard body position radJ
sasolar array inertia slug-ft
2
θsa solar array position radK1 gear train and truss torsional stiffness ft-lb/radB1 gear train and truss torsional damping ft-lb-s/radK2 solar array torsional stiffness ft-lb/radB2 solar array torsional damping ft-lb-s/radT
dplume disturbance torque ft-lb
Tm
motor torque ft-lb′Tm motor torque reflected through gear train ft-lb

Modeling & Analysis ExerciseSpace Station Case Study
K. Craig 9
Simplifying Assumptions(a) one degree-of-freedom motion for each body(b) inboard inertia >> outboard inertia(c) gear train inertia << motor rotor inertia(d) lumped elements(e) neglect gear backlash(f) neglect bearing friction(g) constant parameters(h) neglect all noise except plume load

Modeling & Analysis ExerciseSpace Station Case Study
K. Craig 10
Mathematical Simplifications
(a), (b), (c): reduces the number and complexity of the differential equations
(d): leads to ordinary differential equations(e), (f): makes equations linear(g): leads to constant coefficients in the
differential equations(h): avoids statistical treatment

Modeling & Analysis ExerciseSpace Station Case Study
K. Craig 11
Gearing up for the Math Model
• What are the constitutive physical relations needed?• What are the equilibrium relations?• What are the compatibility relations?• What types of equations do we expect from this system?
linear vs. nonlinearODE vs. PDE
• What are the inputs to the system?

Modeling & Analysis ExerciseSpace Station Case Study
K. Craig 12
Constitutive Physical Relations:
T J B T K
V iR V Ldidt
= = =
= =
&& &θ θ θ T
Equilibrium Relations: Kirchhoff’s Current LawNewton’s Second law
Compatibility Relations: Kirchhoff’s Voltage Law

Modeling & Analysis ExerciseSpace Station Case Study
K. Craig 13
Free Body Diagrams
Jsa
+x
Td
B sa ob2& &θ θ−b g
K sa ob2 θ θ−a f
J sa sa&&θ
+θsa
J B K Tsa sa sa ob sa ob d&& & &θ θ θ θ θ+ − + − − =2 2 0b g a f

Modeling & Analysis ExerciseSpace Station Case Study
K. Craig 14
Job
+x
B ob m1& &θ θ− ′b g
K ob m1 θ θ− ′a f
Job ob&&θ
+θob
J B K B Kob ob ob m ob m ob sa ob sa&& & & & &θ θ θ θ θ θ θ θ θ+ − ′ + − ′ + − + − =1 1 2 2 0b g a f b g a f
B ob sa2& &θ θ−b g
K ob sa2 θ θ−a f

Modeling & Analysis ExerciseSpace Station Case Study
K. Craig 15
Gear Train Relations: θθ
m
m
m
m
NN
N
TT
NN N
′= ≡
′= ≡
2
1
1
2
1
Tm
N1
N2
θm
′Tm ′θm

Modeling & Analysis ExerciseSpace Station Case Study
K. Craig 16
Jm
+x
T K im t m=
J m m&&θ
+θm
J BN
KN
K im m m ob m ob t m&& & &θ θ θ θ θ+ ′ − + ′ − − =1 1
1 10b g a f
BNm ob11& &′ −θ θb g
KNm ob11′ −θ θa f

Modeling & Analysis ExerciseSpace Station Case Study
K. Craig 17
Circuit Diagram
+
-
+
-
R L
Vineb e Kb e m= &θ
V Ri Ldidt
Kinm
e m= + + &θ
im

Modeling & Analysis ExerciseSpace Station Case Study
K. Craig 18
Mathematical Model
J B K T
J B K B K
J BN
KN
K i
Ri Ldidt
K V
sa sa sa ob sa ob d
ob ob ob m ob m ob sa ob sa
m m m ob m ob t m
me m in
&& & &&& & & & &
&& & &
&
θ θ θ θ θ
θ θ θ θ θ θ θ θ θ
θ θ θ θ θ
θ
+ − + − − =
+ − ′ + − ′ + − + − =
+ ′ − + ′ − − =
+ + =
2 2
1 1 2 2
1 1
0
0
1 10
b g a fb g a f b g a fb g a f

Modeling & Analysis ExerciseSpace Station Case Study
K. Craig 19
Sinceθ θθ θ
θ θ
m m
m m
m m
N
N
N
= ′= ′= ′
& &&& &&
J B K T
J B K B K
J N B K NK i
Ri Ldidt
NK V
sa sa sa ob sa ob d
ob ob ob m ob m ob sa ob sa
m m m ob m ob t m
me m in
&& & &&& & & & &
&& & &
&
θ θ θ θ θ
θ θ θ θ θ θ θ θ θ
θ θ θ θ θ
θ
+ − + − − =
+ − ′ + − ′ + − + − =
′ + ′ − + ′ − − =
+ + ′ =
2 2
1 1 2 2
21 1
0
0
0
b g a fb g a f b g a fb g a f

Modeling & Analysis ExerciseSpace Station Case Study
K. Craig 20
MatLab / Simulink Block Diagram
theta_sa
To Workspace2
theta_ob
To Workspace1
theta_m_prime
To Workspace
Sum7
Sum6
Sum5
Sum4
Sum3
Sum2
Sum1
Sum
1/s
Integrator6
1/s
Integrator5
1/s
Integrator4
1/s
Integrator3
1/s
Integrator2
1/s
Integrator1
1/s
Integrator
Input:Td
Input: Vin
B2
Gain9
K2
Gain8
1/Job
Gain7
B1
Gain6
K1
Gain5
1/(N^2*Jm)
Gain4
N*Kt
Gain3
N*Ke/L
Gain2
1/Jsa
Gain10
R/L
Gain1
1/L
Gain

Modeling & Analysis ExerciseSpace Station Case Study
K. Craig 21
One More ApproximationIn practice, a servo amplifier operating in “torque mode” is used to run the DC motor.This compensates for the back-emf effect by using current feedback.It generates a current proportional to applied voltage.The motor model can be simplified to Tm = Ktim where im= KampVin and the motor current im now is an input rather than a state variable.Now, we need to solve the linear ODE’s so we can predict the behavior of the actual system....how do we do this?

Modeling & Analysis ExerciseSpace Station Case Study
K. Craig 22
State-Space Equations
′
′
L
N
MMMMMMMM
O
Q
PPPPPPPP
=− −
− − − −
− −
L
N
MMMMMMMMMMM
O
Q
PPPPPPPPPPP
′
′
&&&&&&&&&
&&
θθθθθθ
θθθθ
m
ob
sa
m
ob
sa
m m m m
ob ob ob ob ob ob
sa sa sa sa
m
ob
sa
m
KN J
KN J
BN J
BN J
KJ
K KJ
KJ
BJ
B BJ
BJ
KJ
KJ
BJ
BJ
0 0 0 1 0 00 0 0 0 1 00 0 0 0 0 1
0 0
0 0
12
12
12
12
1 1 2 2 1 1 2 2
2 2 2 2
θθ
ob
sa
t
m
sa
m
d
NKN J
J
iT
&
L
N
MMMMMMM
O
Q
PPPPPPP
+
L
N
MMMMMMMMM
O
Q
PPPPPPPPP
LNM
OQP
0 00 00 0
0
0 0
01
2
&r r rr r rx Ax Bu
y Cx Du
= += +
y
y
y
i
T
m
ob
sa
m
ob
sa
m
d
1
2
3
1 0 0 0 0 0
0 1 0 0 0 0
0 0 1 0 0 0
0 0
0 0
0 0
L
NMMM
O
QPPP
=L
NMMM
O
QPPP
′
′
L
N
MMMMMMM
O
Q
PPPPPPP
+L
NMMM
O
QPPPLNM
OQP
θθθθθθ
&&&
Note:current im is an inputsince im = KampVin

Modeling & Analysis ExerciseSpace Station Case Study
K. Craig 23
Parameter Numerical ValuesSymbol Value Units
im input ampsKt 8.26 ft-lb/ampN 283 unitlessJm 9.4E-3 slug-ft
2
′θm output radiansJob 400 slug-ft
2
θob output radiansJsa 7.0E5 slug-ft
2
θsaoutput radians
K1 9.28E6 ft-lb/radianB1 492 ft-lb-s/radianK2 2.76E5 ft-lb/radianB2 4.40E3 ft-lb-s/radianTd input ft-lb

Modeling & Analysis ExerciseSpace Station Case Study
K. Craig 24
Mathematical AnalysisPoles: 0, 0
-1.86 ± 15.28i (ωn = 15.39 rad/s, ζ = 0.121)-4.58 ± 189.56i (ωn = 189.61 rad/s, ζ = 0.024)
Zeros: ′θ
θ
θ
m
m
ob
m
sa
m
i
i
i
-0.00296 ± 0.6188i, -6.12 ± 154.4i(ωn = 0.6188 rad/s, 154.56 rad/s)
-0.00314 ± 0.6279i(ωn = 0.6279 rad/s)
None

Modeling & Analysis ExerciseSpace Station Case Study
K. Craig 25
Frequency Response Plots: Input im
10-1
100
101
102
103
-400
-200
0
Frequency (rad/sec)
Gai
n dB
10-1
100
101
102
103
-360
0
360
θob
′θm
θsa
θob
′θm
θsa
φo

Modeling & Analysis ExerciseSpace Station Case Study
K. Craig 26
10 -1 100 101 102 103-200
-100
0
Frequency (rad/sec)
Gai
n dB
10 -1 100 101 102 103
-90
-180
0
φo
′θm
mi
0.62
15.39 189.6
154.6

Modeling & Analysis ExerciseSpace Station Case Study
K. Craig 27
10-1 100 101 102 103-200
-100
0
Frequency (rad/sec)
Gai
n dB
10-1 100 101 102 103
-180
-360
0
θob
mi
0.62
15.39189.6
φo

Modeling & Analysis ExerciseSpace Station Case Study
K. Craig 28
10-1
100
101
102
103
-400
-200
0
Frequency (rad/sec)
Gai
n dB
10-1
100
101
102
103
-180
0
180
θsa
mi
φo
15.39189.6

Modeling & Analysis ExerciseSpace Station Case Study
K. Craig 29
System Behavior at ωω = 0.62 rad/s
θsa
K2
B2
Jsa
J B K
KJ
BJ
sa sa sa sa
sa
sa sa sa
sa
sa
&& &&&& &
θ θ θ
θθ
θθ
+ + =
LNM
OQP = − −
LNMM
OQPPLNM
OQP
2 2
2 2
0
0 1 Natural Frequency: 0.62 rad/s

Modeling & Analysis ExerciseSpace Station Case Study
K. Craig 30
System Behavior at ωω = 15.4 rad/s
θsa
K2
B2
JsaJmN2+Job
θ θob m= ′
( )&& & &&& & &
&&&&&&
&
&
J N J B K B K
J B K B K
KJ
BJ
KJ
BJ
KJ N J
BJ N J
KJ N J
BJ N J
m ob ob ob ob sa sa
sa sa sa sa ob ob
sa
sa
ob
ob
sa sa sa sa
m ob m ob m ob m ob
sa
sa
ob
22 2 2 2
2 2 2 2
2 2 2 2
22
22
22
22
0 1 0 0
0 0 0 1
+ + + = +
+ + = +
L
N
MMMM
O
Q
PPPP=
− −
+ +−
+−
+
L
N
MMMMMM
O
Q
PPPPPP
θ θ θ θ θ
θ θ θ θ θ
θθθθ
θθθθob
L
N
MMMM
O
Q
PPPP
Natural Frequencies:0, 15.49 rad/s

Modeling & Analysis ExerciseSpace Station Case Study
K. Craig 31
System Behavior at ωω = 189.6 rad/s
θob
K1
B1
JobJmN2
′θm
K2
B2
N J B K B K
J B B K K B K
KN J
BN J
KN J
BN J
KJ
BJ
K KJ
B BJ
m m m m ob ob
ob ob ob ob m m
m
m
ob
ob
m m m m
ob ob ob ob
21 1 1 1
2 1 2 1 1 1
12
12
12
12
1 1 2 1 2 1
0 1 0 0
0 0 0 1
&& & &&& & &
&&&&&&
′ + ′ + ′ = +
+ + + + = ′ + ′
′′
L
N
MMMM
O
Q
PPPP=
− −
− + − +
L
N
MMMMMM
O
Q
PPPPPP
θ θ θ θ θ
θ θ θ θ θ
θθθθ
a f a f
a f a f
′′
L
N
MMMM
O
Q
PPPP
θθθθ
m
m
ob
ob
&
&
Natural Frequencies:15.38, 189.6 rad/s

Modeling & Analysis ExerciseSpace Station Case Study
K. Craig 32
Time Response: im = cos(0.6t)
0 5 10 15 20 250
0.002
0.004
0.006
0.008
0.01
0.012
0.014
0.016
0.018
0.02
Time (secs)
Am
plitu
de
θsa
′θm
θob

Modeling & Analysis ExerciseSpace Station Case Study
K. Craig 33
0 1 2 3 4 5-0.04
-0.03
-0.02
-0.01
0
0.01
0.02
0.03
0.04
Time (secs)
Am
plitu
de
Time Response: im = cos(15.39t)
θsa
θob
′θm

Modeling & Analysis ExerciseSpace Station Case Study
K. Craig 34
Conclusion• What did we do?
Understood physical systemDeveloped physical modelDeveloped mathematical modelPredicted dynamic behavior
• Mathematical model based on justifiable approximations!
Simplify - remember to verify your model!Do the results make sense?Garbage in = Garbage out
• Next step: Use the model to design a control system which will satisfy the boss!