MODELAMIENTO, SIMULACIÓN E IMPLEMENTACIÓN DE LA...
39
MODELAMIENTO, SIMULACIÓN E IMPLEMENTACIÓN DE LA ECUACIÓN DE CARDY EN EL FENÓMENO DE PERCOLACIÓN MODELING, SIMULATION AND IMPLEMENTATION OF THE CARDY EQUATION IN THE PERCOLATION PHENOMENON Luisa Fernanda Mahecha Mora 1 Harold Vacca González 2 Resumen: En el presente artículo se presenta el análisis, modelamiento, simulación e implementación de la ecuación de Cardy en el fenómeno de percolación; Se presenta el diseño de un circuito el cual sintetiza éste fenómeno; implementando la transformación de Schwarz- Christoffel se deduce la ecuación integral, se obtiene la solución de ésta de manera aproximada, solucionando su versión diferencial mediante el método Runge-Kutta utilizando un Toolbox de Matlab [1] e implementando la función hipergeométrica de Gauss. Para observar el comportamiento del circuito, se analiza la salida del sistema tanto en la simulación como en el montaje físico; además, implementando métodos numéricos, se aproximará obteniendo así una alternativa de solución y por último se comparará los resultados experimentales con los obtenidos teóricamente. Palabras clave: Modelamiento, Ecuaciones Diferenciales, Percolación, Cardy, Método numérico, transformación de Schwarz-Christoffel. Abstract: In this paper we present the analysis, modeling, simulation and implementation of the Cardy equation in the percolation phenomenon; The design of a circuit is presented, which synthesizes this phenomenon; The implementation of the Schwarz-Christoffel transformation is deduced from the integral equation, the solution is obtained in this approximate way, solving its differential version by means of the Runge-Kutta method using a Matlab Toolbox [1] and implementing the Gaussian hypergeometric function. To observe the behavior of the circuit, the 1 Estudiante Tecnología en Electrónica, Universidad Distrital Francisco José de Caldas; Correo electrónico: [email protected] 2 MSc. En Matemática Aplicada, Docente Universidad Distrital Francisco José de Caldas; Correo electrónico: [email protected]
Transcript of MODELAMIENTO, SIMULACIÓN E IMPLEMENTACIÓN DE LA...

MODELAMIENTO, SIMULACIÓN E IMPLEMENTACIÓN DE LA ECUACIÓN DE CARDY EN EL FENÓMENO DE PERCOLACIÓN
MODELING, SIMULATION AND IMPLEMENTATION OF THE CARDY EQUATION IN THE PERCOLATION PHENOMENON
Luisa Fernanda Mahecha Mora 1 Harold Vacca González2
Resumen: En el presente artículo se presenta el análisis, modelamiento, simulación e
implementación de la ecuación de Cardy en el fenómeno de percolación; Se presenta el diseño
de un circuito el cual sintetiza éste fenómeno; implementando la transformación de Schwarz-
Christoffel se deduce la ecuación integral, se obtiene la solución de ésta de manera
aproximada, solucionando su versión diferencial mediante el método Runge-Kutta utilizando
un Toolbox de Matlab [1] e implementando la función hipergeométrica de Gauss. Para observar
el comportamiento del circuito, se analiza la salida del sistema tanto en la simulación como en
el montaje físico; además, implementando métodos numéricos, se aproximará obteniendo así
una alternativa de solución y por último se comparará los resultados experimentales con los
obtenidos teóricamente.
Palabras clave: Modelamiento, Ecuaciones Diferenciales, Percolación, Cardy, Método
numérico, transformación de Schwarz-Christoffel.
Abstract: In this paper we present the analysis, modeling, simulation and implementation of
the Cardy equation in the percolation phenomenon; The design of a circuit is presented, which
synthesizes this phenomenon; The implementation of the Schwarz-Christoffel transformation is
deduced from the integral equation, the solution is obtained in this approximate way, solving its
differential version by means of the Runge-Kutta method using a Matlab Toolbox [1] and
implementing the Gaussian hypergeometric function. To observe the behavior of the circuit, the
1 Estudiante Tecnología en Electrónica, Universidad Distrital Francisco José de Caldas; Correo electrónico:
[email protected] 2 MSc. En Matemática Aplicada, Docente Universidad Distrital Francisco José de Caldas; Correo electrónico:

output of the system is analyzed both in the simulation and in the physical assembly; In addition,
by implementing numerical methods, it approaches a solution and finally compares it with the
experimental results with those obtained theoretically.
Keywords: Modeling, Differential Equations, Percolation, Cardy, Numerical method, Schwarz-
Christoffel transformation.
1. INTRODUCCIÓN
A mediados de la década de 1950, Broadbent y Hammersley formularon el problema de la
percolación debido a la cuestión de qué tan probable es que el centro de una piedra porosa se
moje cuando se coloca en un recipiente con agua[2], cautivó a los matemáticos de la época,
tanto así que hoy en día este fenómeno desempeña un papel fundamental en la mecánica
estadística y se considera una rama de la teoría de la probabilidad, y aunque posee un modelo
matemático bien definido aún hoy los métodos de análisis y predicción rigurosa de su
comportamiento han resultado mucho más difíciles de lo esperado.[3]
A través de la historia, entender la teoría de la percolación ha facilitado la comprensión de
diversos sistemas físicos; el conocimiento de la percolación tiene una importancia inmensa
teóricamente en campos tan diversos como la biología, la física y la geofísica, y también tiene
una importancia práctica en el proceso de recuperación de petróleo.
Fue realmente hasta 1980 cuando H. Kesten [2] basándose en el trabajo de T. Harris comprobó
que la probabilidad crítica de percolación de enlace en 𝑧2 es 1
2 . Al analizar bidimensionalmente
la percolación crítica por medio de la retícula triangular(Figura 1), ahora ésta se comprende en
su totalidad gracias al Schramm - Loewner Evolution (SLE) [4] el cual es una forma de obtener
curvas aleatorias invariantes conformes.

Figura 1: Retícula triangular[4]
En esta perspectiva J.L. Cardy dedujo una ecuación diferencial (4) sujeta a las condiciones de
frontera 𝜑(0) = 0, 𝜑(1) = 1, aunque se conoce la forma integral de la solución y una forma
proporcional a la función hipergeométrica, en este documento se presenta el diseño de un
circuito el cual sintetiza el fenómeno de percolación modelado con la ecuación de Cardy;
implementando la transformación de Schwarz-Christoffel se deduce la ecuación diferencial, se
obtiene la solución de ésta para su versión integral, así como la correspondiente emanada de
la función hipergeométrica de Gauss. Para observar el comportamiento del circuito, se analiza
la salida del sistema tanto en la simulación en MatLab como en el montaje físico;
implementando Runge Kutta de orden 4 se aproximará obteniendo una alternativa de solución,
por último, se compararán los resultados experimentales con los obtenidos teóricamente.

2. ANTECEDENTES
El estudio de la percolación en las últimas décadas se ha convertido en un tema investigado
desde varias ramas de la ciencia; debido al análisis de este fenómeno, se puede comprender
el proceso del paso de un fluido a través de un medio poroso, y gracias a esto se ha podido
desarrollar sistemas de purificación de agua, estudios en los suelos, comportamiento de
materiales ferromagnéticos, entre otros.
A continuación, se hablará de algunos trabajos desarrollados en donde se obtienen modelos
matemáticos de percolación y sus diferentes métodos de solución.
La percolación fue introducida en el año 1957 por Broadbent y Hammersley [2] en donde
plantearon un modelo probabilístico para el flujo de un fluido, con el fin de analizar si el centro
de una piedra porosa se moja al sumergirse en un líquido; esta investigación llamó la atención
de diferentes investigadores, debido a sus diversas aplicaciones.
Figura 2: Percolación en la red hexagonal.[5]

Una interpretación simple para formular el límite de la escala invariantemente compatible, fue
el expuesto por Langlands, Pouliot y Saint-Aubin [6] en esta publicación obtuvieron un método
que consistía en un dominio conectado ‘Ω’ con los puntos de frontera (a, b, c y d),
sobrepusieron una retícula con malla ‘Γ’ sobre ‘Ω’ y estudiaron la probabilidad que hay en un
grupo abierto que une el arco [a,b] con el arco [c,d] en el límite de ‘Ω’; el resultado de este
análisis conllevó a la conjetura de que las probabilidades de cruce tienen un límite de escala
invariantemente compatible. Luego, utilizando la teoría de campo conforme (CFT), Cardy [7]
pudo derivar el valor exacto de las probabilidades de cruce, asumió tres puntos de frontera
(0,1,∞) y obtuvo una ecuación diferencial que modela eficientemente la percolación [8], la
solución a esta ecuación resultó ser una función hipergeométrica 𝐹12 , dada por:
Π(𝐶+, [1 − 𝑢, 1], [∞, 0]) =Γ (
23)
Γ (13) Γ (
43)
𝑢13 𝐹12 (
1
3,2
3;4
3; 𝑢) =: 𝐹(𝑢)
(1)
Existen diversas definiciones para la función anterior, entre ellas, escribiéndola como una
integral de la siguiente manera:
𝐹(𝑢) =∫ (𝑣(1 − 𝑣))
−23𝑑𝑣
𝑢
0
∫ (𝑣(1 − 𝑣))−
231
0𝑑𝑣
(2)
Carleson observó que la función hipergeométrica [9] mapea el semiplano en un triángulo
equilátero.

En [8] además SLE establece la cadena de Loewner que se obtiene al tomar 𝑤(𝑡) = √𝑘𝐵𝑡,𝑘 ∈
[0, ∞), de esta manera, se muestra que la rejilla resultante será muy probablemente una curva
continua de Höder.
Figura 3: Percolación crítica en Celosía triangular. La ley de la interfaz converge a SLE cuando la malla se vuelve cero.[10]
En Figura 3, se evidencia un rectángulo con dos esquinas opuestas como ‘a’ y ‘b’, uniéndose
con una línea discontinua que conecta a ‘a’ y ‘b’ dentro del espacio ‘Ω’. La ley de la curva
depende del enrejado superpuesto; como la malla tiende a cero, esta ley converge. Luego, en
[11] Schramm decidió describir los límites de escala de los perímetros de clúster o las
interfaces para los modelos de celosía, esto condujo a la introducción de SLE.
Teniendo en cuenta la invariancia conforme propuesta por Langlands, se dice que en la Figura
4 una expresión que define es la siguiente:
𝐹𝐷({𝑦1, … , 𝑦𝑘}) = 𝐹𝑇𝐷({𝑦1, … , 𝑦𝑘}), donde {𝑦1, … , 𝑦𝑘} se refiere a la colección de segmentos de
frontera que son conectados a un clúster común.[3]

Figura 4: Dos funciones asociadas con el limite continuo del primer tipo de modelo critico.[3]
La frontera para D consiste en cuatro segmentos, la invariancia conforme implica que la
probabilidad dependa solo del cruce del radio y está dada por:
𝑓(𝑥1, … , 𝑥4) = 𝜑(𝑢(𝑥1, … , 𝑥4)) 𝑐𝑜𝑛 𝑢(𝑥1, … , 𝑥4) =(𝑥1−𝑥2)(𝑥3−𝑥4)
(𝑥1−𝑥3)(𝑥2−𝑥4)
(3)
J. Cardy propuso una ecuación para la cantidad anterior que esta descrita por:
𝑢(𝑢 − 1)𝑑2𝜑
𝑑𝑢2+
2
3(1 − 2𝑢)
𝑑𝜑
𝑑𝑢= 0
(4)
Con condiciones de frontera evaluadas en 𝜑(0) = 0, 𝜑(1) = 1, de esta manera aclaramos que
la solución puede ser integral o ya sea por medio de la función hipergeométrica de Gauss, la
forma integral está dada de la siguiente manera:
𝜑(𝑢) = ∫𝑑𝑥
[𝑥(1 − 𝑥)]2 3⁄
𝑢
0
(5)

También se puede expresar por condiciones de operadores diferenciales[3]:
𝐿𝑛 = − ∑(𝑥𝑗−𝑥1)𝑛+1𝜕
𝜕𝑥𝑗
∞
𝑗≠1
(6)
Para el caso de la función hipergeométrica, encontramos esta solución también propuesta con
John Cardy[7]:
Aplicando la propiedad Γ(𝛼 + 1) = 𝛼Γ(α) función gama en (1), obtenemos la siguiente
expresión:
𝜋((𝑋1, 𝑋2), (𝑋3, 𝑋4)) =3Γ (
23)
Γ (13)
2 𝜂1 3⁄ 𝐹1(1
3,2
3,4
3; 𝜂)
(7)
𝜋((𝑋1, 𝑋2), (𝑋3, 𝑋4)) = 1 −3Γ (
23)
Γ (13)
2 (1 − 𝜂)1 3⁄ 𝐹1(1
3,2
3,4
3; 1 − 𝜂)
(8)
De esta manera, la percolación proporciona una prueba realmente importante de las ideas de
CFT gracias a que las simulaciones numéricas a gran escala se realizan más fácilmente, Cardy
en [7] cruza las probabilidades en el lenguaje de la teoría de campo conforme, y deriva
expresiones exactas. En La predicción de Cardy para πh para la percolación bidimensional
procede en dos pasos que son: identificar la probabilidad πh con la diferencia de dos funciones
de partición con límite condiciones para el modelo de Potts de 1 estado y usar la teoría de
campo conforme en c = 0 para obtener una expresión analítica para esta diferencia.[7]

Anteriormente mencionábamos la universalidad de la percolación, es por esto que hablaremos
de diferentes aplicaciones de esta teoría; en primer lugar tenemos método de Monte Carlo,
que en este caso se utilizará para analizar el modelo de percolación de sitios en una red
cuadrada homogénea de dos dimensiones, en [12] se desarrolló un algoritmo capaz de utilizo
una Nexys3 Spartan-6 FPGA. Para poder obtener la probabilidad de percolación de una red
de dimensión LxL, para distintas concentraciones, es necesario sortear una distribución
aleatoria de sitios ocupados dentro de la red, recorrer los LxL sitios de la red, detectar los
clúster existentes [13] y verificar si existe un clúster percolante. Para el método de Monte
Carlo, es necesario realizar el proceso varias veces para que el resultado sea confiable.
Figura 5:Curva de Probabilidad de percolación para diferentes valores[12]
.
Ahora bien, en la Figura 5 se muestra la probabilidad de percolación para dos redes con
diferentes valores de L. El punto donde ambas curvas se cortan indica el umbral de
percolación. Como se puede ver, este procedimiento requiere mucho tiempo cuando se lo
implementa con procesadores secuenciales.
El sistema tiene diferentes bloques, entre los cuales un generador random, un detector de
percolación que consiste como tal en identificar el tipo de percolación por condiciones de borde

periódicas, de esta manera, se debe determinar si existe un clúster perco|SSlante; para esto,
se supone que se parte de un borde lateral cualquiera, por ejemplo del borde izquierdo de la
red y se analiza si algún sitio ocupado de la primera columna pertenece a un clúster percolante
que asimila un camino eléctrico ente dos sitios extremos de la red, donde cada sitio del
clúster es conductor sólo si su estado está ocupado. Finalmente los otros dos bloques son de
control que consiste en sincronizar todas las tareas y se inicia con un reset del sistema, de
entrada salida que sirve para seleccionar los datos a trabajar y entrada salida serial que se
encarga de la comunicación con el PC. En la Figura 6 se observa el esquema del sistema
planteado.[12]
Figura 6: Esquema general del sistema.[12]
De esta manera al analizar el sistema se evidencia que el tiempo necesario para estabilizar la
salida del detector de percolación, es menor que el requerido por el generador para configurar
la red y varía con la ocupación de la misma. El caso más desfavorable en el detector se da
cuando se forma el clúster percolante de mayor longitud, que para una red de 2n x2n está
formado por 22n-1 sitios (lo que equivale a una ocupación del 50%). En el caso de una red de
32x32, el tiempo necesario para que se estabilice la señal de salida del detector, es el tiempo

que tarda en propagarse la señal a través de 512 sitios ocupados de la red. En la Figura 7 se
evidencia las curvas de percolación para 32x32 y 16x16
Figura 7: Curvas de Percolación para 32x32 y 16x16.[12]
En segundo lugar, se verá un tema muy interesante que es el mecanismo de percolación de la
red de nanotubos de carbono, realizado por Ming Zhang y Lei Wen que básicamente consiste
en estructuras de red que son utilizadas comúnmente como los canales de conducción de los
transistores de película delgada (TFT), la dependencia de la resistencia del canal en la longitud
del canal, la densidad de tubo, y la longitud promedio. En [14] se realizó un algoritmo capaz de
proporcionar los caminos reales de percolación. El material Nanotubos de carbono de pared
simple (SWNT) es muy prometedor para los transistores de película delgada (TFT) por sus
propiedades únicas, como la alta conducción de corriente, aunque el problema existente es
que dependiendo del umbral de percolación podría llegar a causar un corto circuito, todo el
canal puede ser considerado como un circuito de gran escala que consiste en resistencias
puras. Y el comportamiento de la red se puede dividir en dos partes, el tubo-tubo
interrelaciones contactos y los caminos de percolación. Por lo tanto, con el fin de predecir
cuantitativamente cómo la red geométrica características podrían afectar la percolación canal
y la conducción, se necesita un modelo analítico general para ser establecido con múltiples
variables independientes tales como la longitud de canal, longitud media de tubo y la densidad
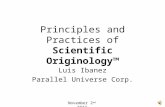
del tubo. En la Figura 8 se mostrará la relación de resistencias con la utilización del método de
Monte-Carlo.
Figura 8: Cambio del circuito con la implementación de los nanotubos.[14]
A través de este proceso, todos los contactos tubo-tubo se encuentran en Figura 9 y se
almacena en una matriz adyacente. Sin embargo, hay muchos tubos independientes con sólo
una conexión a todos los otros tubos o ninguna, lo que significa que no participan en la
percolación de corriente y no deben ser considerados durante el cálculo de la resistencia total
del canal. Por lo tanto, en la siguiente etapa un algoritmo específico se implementa para
recortar todas las ramas inútiles de la red mediante las matrices de y los datos de la red se
traduce en un archivo de lista de conexiones y calcula el HSPICE.

Figura 9: La red recortado cortando las ramas inútiles iterativamente, (B) y (c) el zoom-en las figuras que muestran los tubos permanecido y sus puntos de contacto en diferentes aumentos local, (D) el circuito equivalente de (c). Hay tres tipos de contactos de cruce de percolación verdadera: Tipo de cabeza por cabeza (el izquierdo), tipo cruzado (el del medio) y el tipo de triple camino (de la derecha).[14]
3. DEDUCCIÓN ECUACIÓN DE CARDY
Utilizando la fórmula de mapeo conforme del semiplano superior sobre un polígono cerrado
propuesto por Schwarz-Christoffel [15] donde se toma n puntos sobre el eje real 𝑥1 < ⋯ < 𝑥𝑛,
por lo que sus imágenes 𝑤1 = 𝑓(𝑥1), … , 𝑤𝑛 = 𝑓(𝑥𝑛) sean los vértices de un polígono de n lados
bajo una función analítica.
A continuación se considera el mapeo 𝑤 = 𝑓(𝑧) = (𝑧 − 𝑥1)𝛼
𝜋⁄ en el semiplano superior 𝑦 ≥ 0
, donde 𝑥1 𝑦 𝛼 son números reales, 𝛼 comprendida entre 0 ≤ 𝛼 ≤ 2𝜋; éste mapeo se compone

de una translación 𝑇(𝑧) = 𝑧 − 𝑥1 y la función de poder real 𝐹(𝑧) = 𝑧𝛼
𝜋⁄ ; 𝑧 rota ∝
𝜋 a través del
origen para incrementar o disminuir su argumento 𝜃 de 𝑧 a un argumento 𝜃∝
𝜋 de 𝑤.
La curva parametrizada por 𝑤 = 𝑓(𝑡) es la imagen del eje real, con vector tangente 𝑓′(𝑡) que
forma un ángulo 𝑎𝑟𝑔𝑓′(𝑡) con el semieje real positivo, de esta manera, se debe encontrar
funciones en el cual su derivada en cada uno de sus intervalos presente un argumento
constante, así, solo cambie de argumento -por no ser analítica- en los puntos 𝑥𝑖, por lo tanto,
derivando 𝑓(𝑧) se tiene:
𝑓′(𝑧) =𝛼
𝜋(𝑧 − 𝑥1)(𝛼
𝜋⁄ )−1 (9)
Por consiguiente, 𝑓′(𝑧) ≠ 0, si 𝑧 = 𝑥 + 𝑖𝑦 y 𝑦 > 0, resulta que 𝑤 = 𝑓(𝑧) es un mapeo conforme
en cualquier punto con 𝑧 con 𝑦 > 0. Así consideramos una nueva función f(z), analítica en
𝑦 > 0 y cuya derivada sea:
𝑓′(𝑧) = 𝐴(𝑧 − 𝑥1)(𝛼1
𝜋⁄ )−1(𝑧 − 𝑥2)(𝛼2
𝜋⁄ )−1(𝑧 − 𝑥𝑛)(𝛼𝑛
𝜋⁄ )−1
(10)
Donde 𝛼1, 𝛼2, 𝛼3 son reales y A es una contante compleja, usualmente hay cierto grado de
libertad para escoger los puntos 𝑥𝑘 en el eje x, de esta manera, se podría simplicar el calculo
de 𝑓(𝑧). Como se decía anteriormente, el mapeo de Schwarz-Christoffel puede ser usado para
construir un mapeo sobre una región poligonal cerrada, para poder hacerlo, se requiere
implementar la formula usando 𝑛 − 1 de los 𝑛 ángulos interiores del polígono delimitado.
Una formula general para 𝑓(𝑧) es dada por la siguiente integral:

𝑓(𝑧) = 𝐴 ∫(𝑧 − 𝑥1)(𝛼1
𝜋⁄ )−1(𝑧 − 𝑥2)(𝛼2
𝜋⁄ )−1(𝑧 − 𝑥𝑛)(𝛼𝑛
𝜋⁄ )−1𝑑𝑧 + 𝐵 (11)
Donde A y B son constantes complejas; finalmente solo queda reemplazar y solucionar la
integral.
Ahora bien, se conoce en que consiste el mapeo de Schwarz-Christoffel por lo que se
procederá a deducir la ecuación integral de Cardy, para ello se implementará un mapeo
conforme del semiplano superior sobre una región poligonal cerrada de tres lados, de esta
manera, se definen los vértices: 𝑤0 = 0, 𝑤2 = 1 y 𝑤3 =1
2+
1
2√3𝑖 y los puntos 𝑥𝑛 del eje real,
además, se debe tener en cuenta que para implementar esta fórmula se tienen 𝑛 − 1 lados de
los ángulos interiores a éste, por lo tanto, al reemplazar 3 − 1 = 2, con esto, se tendrá libre
elección para definir los puntos 𝑥1 y 𝑥2, así 𝑥1 = 0 y 𝑥1 = 1.
Figura 10: Eje real con puntos 𝒙𝟏 = 𝟎,
𝒙𝟐 = 𝟏. Elaboración propia.
Figura 11: Mapeo conforme de un triangulo
equilátero. Elaboración propia.

Como el mapeo es sobre un triángulo equilátero se conoce el valor de sus ángulos, 𝛼1 = 𝛼2 =
𝛼3 =𝜋
3, ahora, se reemplaza estos valores en la formula general:
𝑓′(𝑧) = 𝐴(𝑧 − 0)−2
3⁄ (𝑧 − 1)−2
3⁄ (12)
Así se tendría que 𝑓′(𝑧):
𝑓′(𝑧) = 𝐴(𝑧)(−23⁄ )(𝑧 − 1)(−2
3⁄ ) (13)
De esta manera, se sabe que no existe una antiderivada de 𝑓′(𝑧) = 𝐴(𝑧 − 0)−2
3⁄ (𝑧 − 1)−2
3⁄
que pueda expresarse en términos de funciones elementales; como f’ es analítica en el dominio
𝑦 < 0, se sabe que existe una antiderivada en este dominio dada por la siguiente integral:
𝑓(𝑧) = 𝐴 ∫1
𝑆2
3⁄ (𝑆 − 1)2
3⁄𝑑𝑠 + 𝐵
𝑍
0
(14)
Ahora, se hallarán las constantes complejas A y B, evaluando 𝑓(0) para encontrar la constante
B, por lo tanto, evaluando:
𝑓(0) = 𝐴 ∫1
𝑆2
3⁄ (𝑆 − 1)2
3⁄𝑑𝑠 + 𝐵
0
0
(15)
𝐵 = 0
Para hallar la constante A, se evaluará 𝑓(1), luego reemplazando:
𝑓(1) = 𝐴 ∫1
𝑆2
3⁄ (𝑆 − 1)2
3⁄𝑑𝑠
1
0
(16)

Si Γ denota el valor de la integral, entonces:
Γ = 𝐴 ∫1
𝑆2
3⁄ (𝑆 − 1)2
3⁄𝑑𝑠
1
0
(17)
Así 𝐴 =1
Γ , de esta manera se obtiene la forma integral de la ecuación de Cardy que modela
el fenómeno de percolación:
4. MÉTODOS DE SOLUCIÓN
a. Método Runge-Kutta (RK)
El método de Runge-Kutta es un conjunto de métodos implícitos y explícitos para dar una
aproximación a la solución de las ecuaciones diferenciales ordinarias, la idea de RK es sustituir
el problema de valor inicial, de esta manera, sea (19) una ecuación diferencial ordinaria:
Con 𝑓: Ω ⊂ ℝ × ℝ𝑛 → ℝ𝑛 donde Ω es un conjunto abierto con la condición que el valor inicial
sea:
De están manera, Runge Kutta en su forma más general se puede expresar así:
Γ = ∫1
𝑆2
3⁄ (𝑆 − 1)2
3⁄𝑑𝑠
1
0
(18)
𝑦′ = 𝑓(𝑡, 𝑦(𝑡)) (19)
(𝑡0, 𝑦0) ∈ Ω (20)

Donde h representa el paso entre los números sucesivos y los coeficientes 𝑘𝑖 representan los
términos de aproximación, por lo tanto, el método tiene la siguiente forma:
donde 𝑎𝑖 son constantes y los 𝑘𝑖 son:
𝑘1 = f(𝑡𝑖 , 𝑦𝑖) (23)
𝑘2 = 𝑓(𝑡𝑖 + 𝑝1ℎ, 𝑦𝑖 + 𝑞11𝑘1ℎ) (24)
𝑘3 = 𝑓(𝑡𝑖 + 𝑝2ℎ, 𝑦𝑖 + 𝑞21𝑘1ℎ + 𝑞22𝑘2ℎ) (25)
𝑘𝑛 = 𝑓(𝑡𝑖 + 𝑝𝑛−1ℎ, 𝑦𝑖 + 𝑞𝑛−1,1𝑘1ℎ + 𝑞𝑛−1,2𝑘2ℎ + ⋯ + 𝑞𝑛−1,𝑛−1𝑘𝑛−1ℎ) (26)
i. Método de Runge Kutta de orden 4 (RK4)
En este documento se hace uso del método de Runge Kutta de orden 4, lo que equivaldría a
utilizar el método de Taylor hasta ℎ4 [16]. Este es uno de los procedimientos más difundidos y
a la vez más exactos para obtener la solución numérica del problema de valor inicial [17]:
𝑦𝑛+1 = 𝑦𝑛 + ℎ ∑ 𝑏𝑖𝑘𝑖
𝑠
𝑖=1
(21)
𝑦𝑖+1 = 𝑦 𝑖 + ℎ (𝑎1𝑘1 + 𝑎2𝑘2+. . . + 𝑎𝑛𝑘𝑛) , (22)
𝑦𝑖+1 = 𝑦𝑖 +ℎ
6 (𝑘1 + 2𝑘2 + 2𝑘3 + 𝑘4)
(27)

donde:
𝑘1 = 𝑓(𝑡𝑖 , 𝑦𝑖) (28)
𝑘2 = 𝑓(𝑡𝑖 + ℎ/2, 𝑦𝑖 + ℎ𝑘1/2) (29)
𝑘3 = 𝑓(𝑡𝑖 + ℎ/2, 𝑦𝑖 + ℎ𝑘2/2) (30)
𝑘4 = 𝑓(𝑡𝑖 + ℎ, 𝑦𝑖 + ℎ𝑘3) (31)
De esta manera, se implementó RK4 con un toolbox de Matlab [18] para dar solución
a la ecuación diferencial de Cardy, los resultados de la aproximación se observan en
la Figura 12 y en la Tabla 1.
Figura 12: Solución ecuación diferencial utilizando RK4 en MatLab. Elaboración propia.

Tabla 1
𝑥 0 110⁄ 2
10⁄ 310⁄ 4
10⁄ 510⁄ 6
10⁄ 710⁄ 8
10⁄ 910⁄ 1
𝑓(𝑥) 0 0.235 0.326 0.390 0.445 0.486 0.550 0.606 0.666 0.755 0.987
b. Función hipergeométrica de Gauss.
Despejando el operador diferencial de segundo orden en la ecuación diferencial de Cardy, se
obtiene [19]
Otra de las soluciones de la ecuación de Cardy() se halló utilizando la función hipergeometrica
de Gauss, denominada así por Carl F. Gauss, la cual es solución de la siguiente ecuación
diferencial:[20]
En donde a, b y c son constantes de:
Como se obtuvo anteriormente, 𝑥 = 0 𝑦 𝑥 = 1 son puntos singulares de la ecuación, ahora, se
obtendrán soluciones a esta de la siguiente manera ():
𝑑2𝜑
𝑑𝑢2= −
2
3
(1 − 2𝑢)
𝑢(1 − 𝑢)
𝑑𝜑
𝑑𝑢
(32)
𝑥(1 − 𝑥)𝑦′′ + [𝑐 − (𝑎 + 𝑏 + 1)𝑥]𝑦′ − 𝑎𝑏𝑦 = 0 (33)
𝑃(𝑥) =𝑐 − (𝑎 + 𝑏 + 1)𝑥
𝑥(1 − 𝑥) 𝑦 𝑄(𝑥) = −
𝑎𝑏
𝑥(𝑥 − 1)′
(34)

Donde 𝑐0 ≠ 0 y r es un número que debe determinarse, hallando así 𝑦′ y 𝑦′′ de () y
reemplazándola en (), la ecuación diferencial se convierte en:
Donde los posibles valores de r son: 𝑟 = 0 𝑦 𝑟 = 1 − 𝑐, para 𝑟 = 0 como el coeficiente de 𝑥𝑘
con 𝑘 ≥ 1,de esta forma, se tiene que:
Se utiliza la sustitución 𝑘 − 1 = 𝑛, de esta manera, se obtiene la siguiente fórmula para los
coeficientes 𝑐𝑛:
Por inducción matemática se establece que:
Con estos coeficientes () se puede escribir como:
𝑦 = ∑ 𝑐𝑛(𝑥)𝑛+𝑟
∞
𝑛=0
(35)
(𝑟 − 1 + 𝑐)𝑐0 + ∑{(𝑘 + 𝑟)(𝑘 + 𝑟 − 1 + 𝑐)𝑐𝑘 − [(𝑘 + 𝑟 − 1)(𝑘 + 𝑟 − 2)+∝ (𝑘 + 𝑟 − 1) + 𝑎𝑏]𝑐𝑘−1} × 𝑥𝑘
∞
𝑘=1
(36)
(𝑘 + 𝑐 − 1)𝑐𝑘 − [(𝑘 − 1)(𝑘 − 2)+∝ (𝑘 − 1) + 𝑎𝑏]𝑐𝑘−1 = 0 , 𝑘 ≥ 1, (37)
𝑐𝑛+1 =(𝑛 + 𝑎)(𝑛 + 𝑏)
(𝑛 + 𝑏)(𝑛 + 𝑐)𝑐𝑛, 𝑛 = 0,1,2, ⋯
(38)
𝑐𝑛 =(𝑎)𝑛(𝑏)𝑛
𝑛! (𝑐)𝑛
(39)
Por lo que (40) se conoce como la serie hipergeométrica y es denotada:[20]
Ahora, se obtiene una aproximación de la ecuación de Cardy utilizando la función
hipergeometrica, para ello, se desarrolló un software en MatLab y de esta manera, se obtiene
una acertada aproximación de la ecuación diferencial de Cardy modificando el grado del
polinomio (grado 10, 50,100):
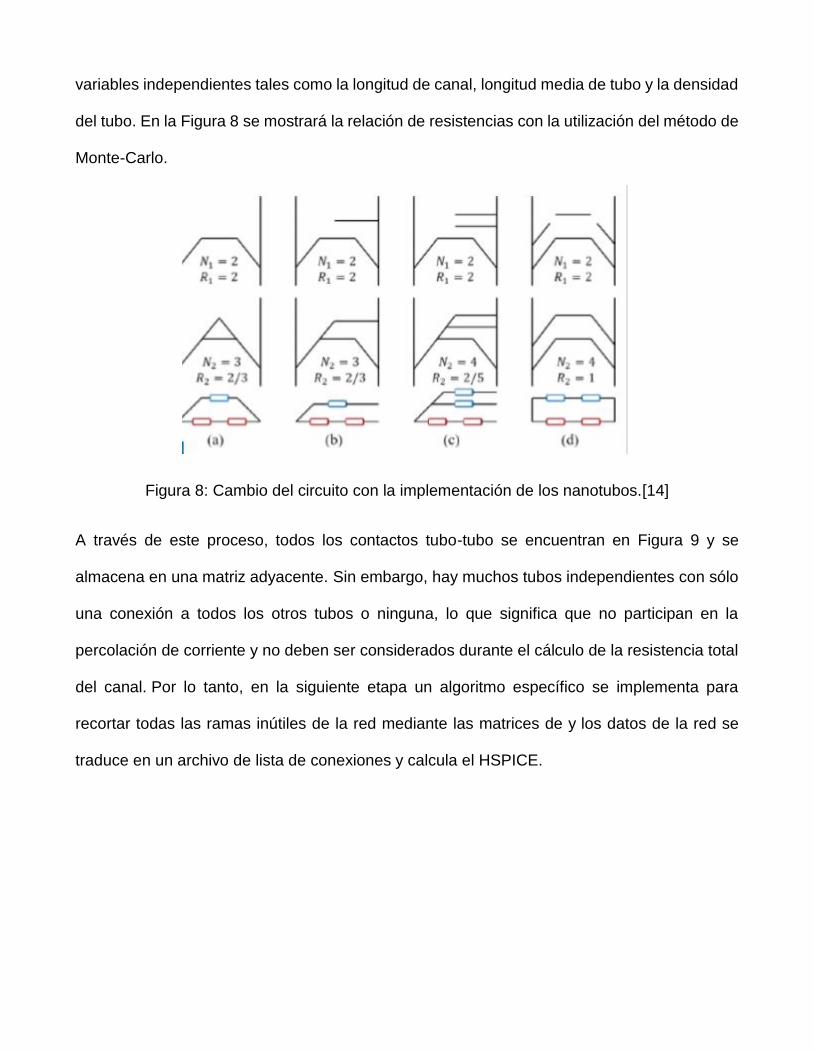
Principalmente se obtuvo la solución tomando polinomios de grado 10:
Figura 13: Solución ecuación de Cardy por función hipergeométrica tomando un polinomio de
grado 10 en Matlab. Elaboración propia.
De acuerdo a la Figura 13 se tabuló, obteniendo los siguientes datos:
Tabla 2
𝑦 = ∑(𝑎)𝑛(𝑏)𝑛
𝑛! (𝑐)𝑛
𝑥𝑛
𝑛!
∞
𝑛=0
(40)
𝑓1(𝑎, 𝑏, 𝑐|𝑥) =(𝑎)𝑛(𝑏)𝑛
𝑛! (𝑐)𝑛
𝑥𝑛
𝑛!
(41)

𝑥 0 1/10 2/10 3/10 4/10 5/10
6/10 7/10 8/10 9/10 1
𝑓(𝑥) 0 0.2673 0.3433 0.4012 0.452 0.5 0.5479 0.5985 0.6551 0.7231 0.8111
Para un polinomio de grado 50 se obtuvo la siguiente gráfica:
Figura 14: Solución ecuación de Cardy por función hipergeométrica tomando un polinomio de grado 50 en Matlab. Elaboración propia.
De acuerdo a la Figura 14 se tabuló, obteniendo los siguientes datos:
Tabla 3
𝑥 0 1/10 2/10 3/10 4/10 5/10
6/10 7/10 8/10 9/10 1
𝑓(𝑥) 0 0.2673 0.3433 0.4012 0.452 0.5 0.548 0.5988 0.6567 0.7326 0.8872
Para un polinomio de grado 100 se obtuvo la siguiente gráfica:

Figura 15: Solución ecuación de Cardy por función hipergeométrica tomando un polinomio de grado 100 en Matlab. Elaboración propia.
De acuerdo a la Figura 15 se tabuló, obteniendo los siguientes datos:
Tabla 4
𝑥 0 1/10 2/10 3/10 4/10 5/10
6/10 7/10 8/10 9/10 1
𝑓(𝑥) 0 0.2673 0.3433 0.4012 0.452 0.5 0.548 0.5988 0.6567 0.7327 0.9102
c. Solución integral de ecuación de Cardy.
Ahora se verificará que la integral es solución de la ecuación diferencial de Cardy (4), de esta
manera sabemos que esta es nuestra solución teórica, para comprobarlo se tomará (5)
Se deriva dos veces, para luego reemplazarla en (4),
𝜑(𝑢) = ∫𝑑𝑥
[𝑥(1 − 𝑥)]2 3⁄
𝑢
0
(42)

Y para 𝑑2𝜑
𝑑𝑢2:
Ahora los valores obtenidos se remplazan en la ecuación diferencial de Cardy.
Lo que nos da que la igualdad se cumple, por lo tanto la integral (5) es solución de la ecuación
diferencial (4).
Se solucionó la integral en Matlab, con lo que se encontraron los siguientes valores, además
en la Figura 16Figura 16: Solución integral de la ecuación de Cardy. se puede visualizar la
gráfica solución.
𝑑𝜑
𝑑𝑢=
1
[𝑢(𝑢 − 𝑢)]2 3⁄
(43)
𝑑2𝜑
𝑑𝑢2=
2(1 − 2𝑥)
3(𝑥(𝑥 − 1))5
3⁄
(44)
𝑢(1 − 𝑢)𝑑2𝜑
𝑑𝑢2=
2(1 − 2𝑥)
3(𝑥(𝑥 − 1))5
3⁄+
2
3(1 − 2𝑢) (
1
[𝑢(𝑢 − 𝑢)]2 3⁄) = 0
(45)
0 = 0 (46)

Figura 16: Solución integral de la ecuación de Cardy.
𝑥 0 1/10 2/10 3/10 4/10 5/10
6/10 7/10 8/10 9/10 1
𝑓(𝑥) 0 0.258 0.364 0.415 0.452 0.5 0.540 0.600 0.647 0.763 1
5. Sintetización
Se realizó una simulación en Simulink de Matlab que constaba de un conjunto de bloques
que describe la ecuación diferencial de Cardy, para esto fue necesario despejar la derivada
de mayor orden en la ecuación de la siguiente manera:
𝑑2𝜑
𝑑𝑢2= −
2
3
(1 − 2𝑢)
𝑢(1 − 𝑢)
𝑑𝜑
𝑑𝑢
(42)

En la Figura 17 se implementa una función rampa que será la representación de 𝑢 en la
ecuación.
Figura 17: implementación ecuación de Cardy en Simulink. Elaboración propia.
De esta manera, cada conjunto de bloques tiene su equivalente expresión matemática,
iniciando con el numerador en la ecuación (42), como se observa en la Figura 18, 𝑢 es
amplificada dos veces, pasa por un restador (−2𝑢) y se suma con una constante 1,
obteniendo (1 − 2𝑢).
Figura 18: Expresión (𝟏 − 𝟐𝒖) en Simulink. Elaboración propia.
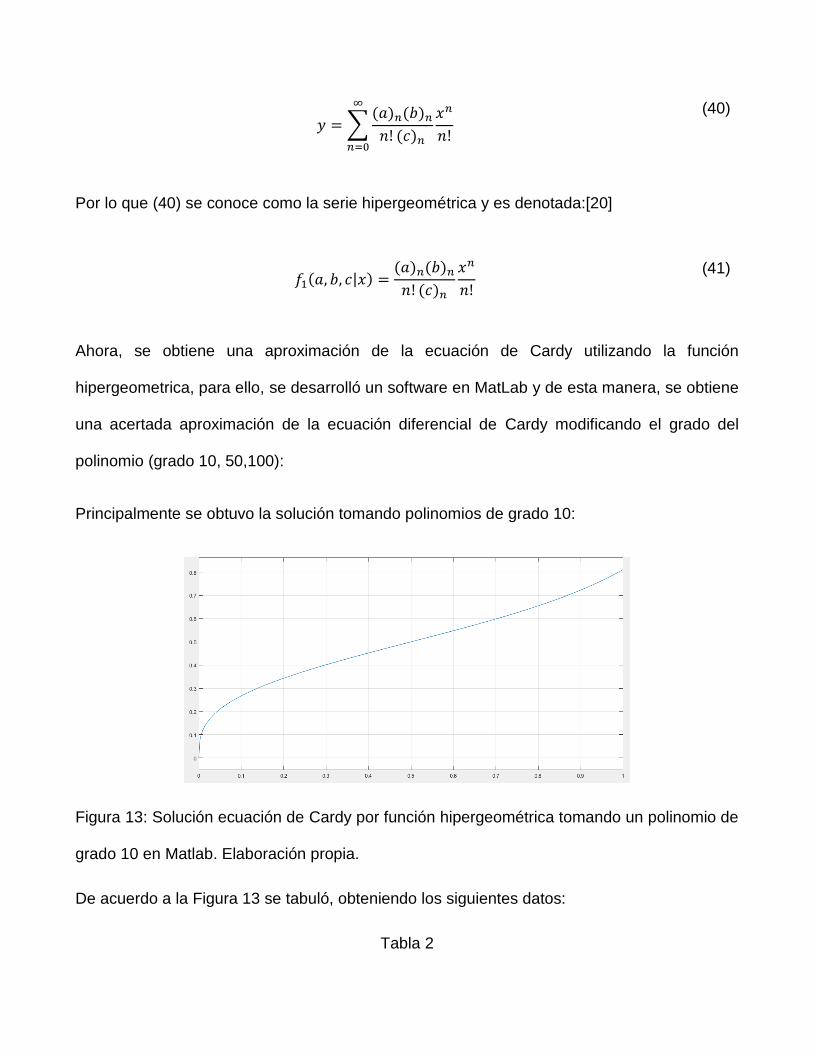
Para formar la expresión del denominador, 𝑢 será negativo al pasar por el restador, luego
se le adiciona 1, quedando así (1 − 𝑢), seguidamente como se observa en (42) aún falta
multiplicar la expresión por u, por ello se implementó un multiplicador que operará las
expresión anterior, quedando así: 𝑢(1 − 𝑢).
Figura 19: Expresión 𝒖(𝟏 − 𝒖) en Simulink. Elaboración propia.
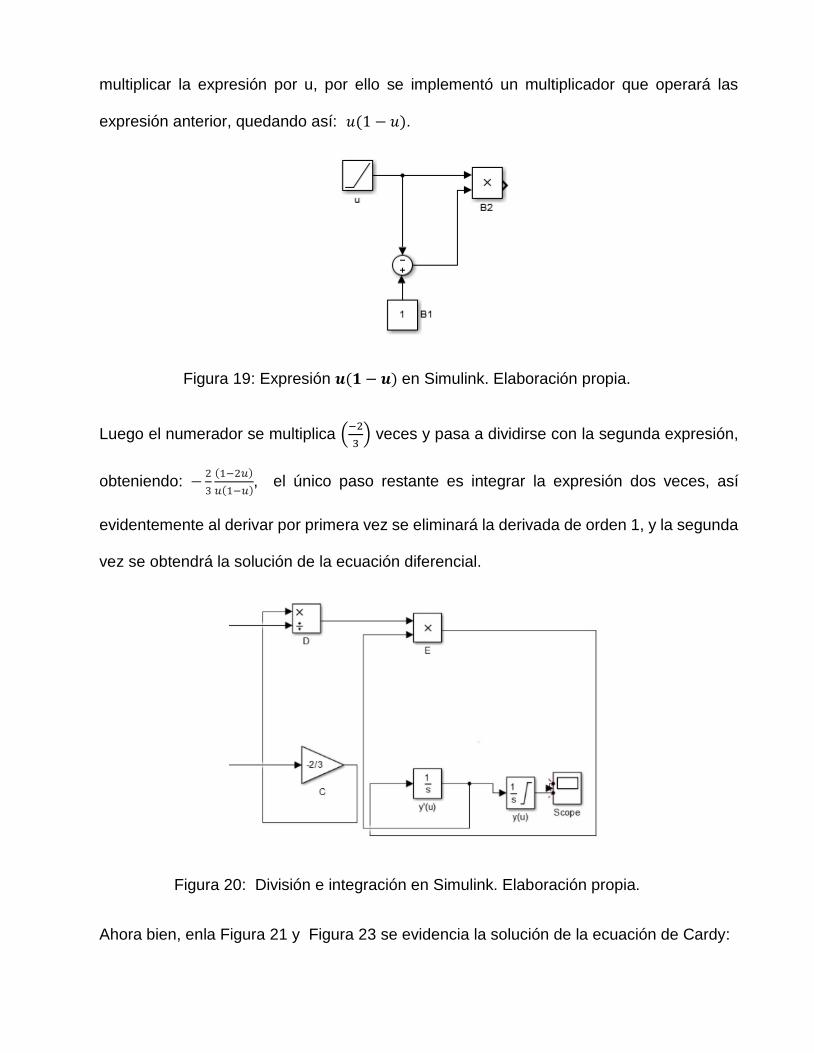
Luego el numerador se multiplica (−2
3) veces y pasa a dividirse con la segunda expresión,
obteniendo: −2
3
(1−2𝑢)
𝑢(1−𝑢), el único paso restante es integrar la expresión dos veces, así
evidentemente al derivar por primera vez se eliminará la derivada de orden 1, y la segunda
vez se obtendrá la solución de la ecuación diferencial.
Figura 20: División e integración en Simulink. Elaboración propia.
Ahora bien, enla Figura 21 y Figura 23 se evidencia la solución de la ecuación de Cardy:

Figura 21: Simulación Simulink ecuación de Cardy tomando los puntos 𝒙𝟏 = 𝟎 y 𝒙𝟐 = 𝟎, 𝟓. Elaboración propia.
Tomando valores en 𝑥1 = 0 y 𝑥2 = 0,5, se muestra en la Figura 22 que para un valor en
𝑥1 = 0 le corresponde el valor en 𝑦1 = 0 y para un valor en 𝑥2 = 0,5 le corresponde un valor
de 𝑦 = 0,49489.
Figura 22: Valores en y, simulación en Simulink (parte 1). Elaboración propia.
Ahora tomando valores en 𝑥1 = 0,5 y 𝑥2 = 1 de la Figura 23 :

Figura 23: Simulación Simulink ecuación de Cardy tomando los puntos 𝒙𝟏 = 𝟎, 𝟓 y 𝒙𝟐 = 𝟏. Elaboración propia.
Tomando valores en 𝑥1 = 0,5 y 𝑥2 = 1, se muestra en la ()que para un valor en 𝑥1 = 0,5 le
corresponde el valor en 𝑦1 = 0,49489 y para un valor en 𝑥2 = 1 le corresponde un valor de
𝑦 = 1.
Figura 24: Valores en y, simulación en Simulink( parte 2). Elaboración propia.
Seguidamente al haber implementado la sintetización anterior se desarrolló una comunicación
serial entre simulink y el microcontrolador Psoc 5lp, para poder realizar esta comunicación fue
necesario pasar el dato a 8 bits, por lo tanto se multiplico la salida por 255, después se paso
este dato por la función floor que toma los datos fraccionarios y los aproxima a el valor entero
mas cercano por debajo.

Figura 25: conversión y discretización de la señal al enviar.
Fue necesario discretizar la señal, ya que estaba en tiempo continuo, esto con el fin de darle
un delay al enviar los datos, al recibir la psoc estos datos se implementó un DAC de 8 bits y
finalmente esto fue visualizado en un osciloscopio digital, evidentemente en la Figura 26 se
muestra que en el eje x la señal abarca un valor de 0 hasta 110ms.
Figura 26: señal de salida del sistema.
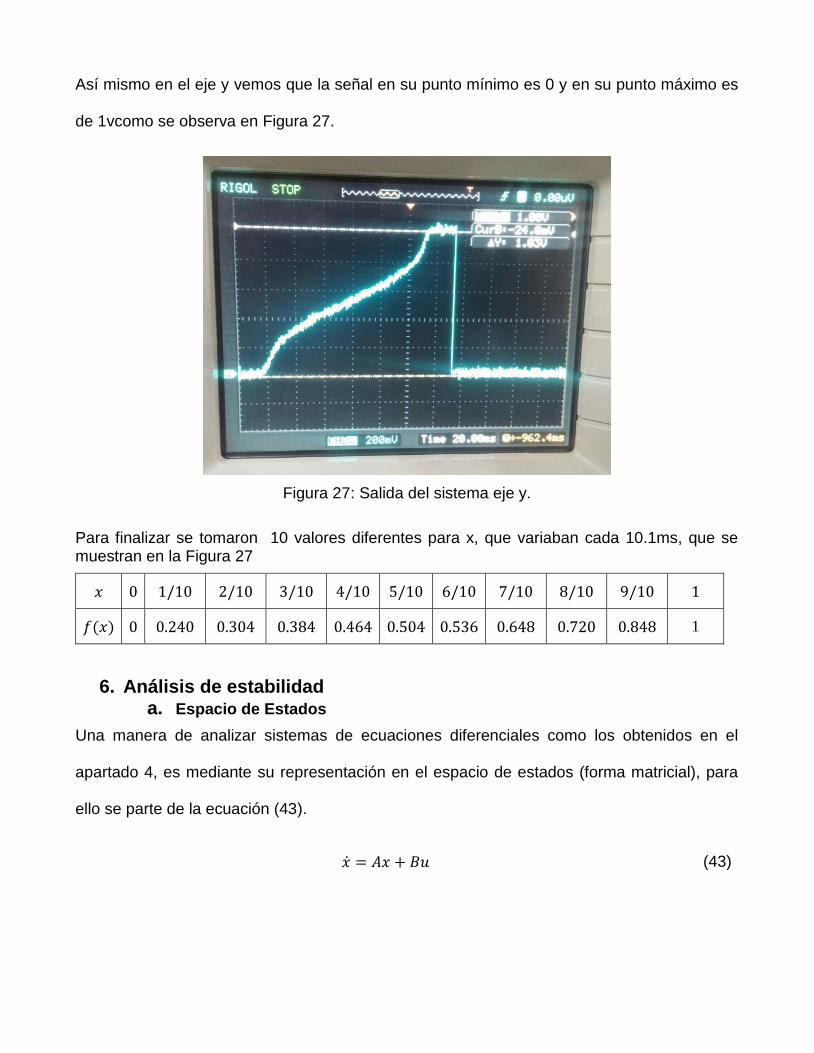
Así mismo en el eje y vemos que la señal en su punto mínimo es 0 y en su punto máximo es
de 1vcomo se observa en Figura 27.
Figura 27: Salida del sistema eje y.
Para finalizar se tomaron 10 valores diferentes para x, que variaban cada 10.1ms, que se muestran en la Figura 27
𝑥 0 1/10 2/10 3/10 4/10 5/10 6/10 7/10 8/10 9/10 1
𝑓(𝑥) 0 0.240 0.304 0.384 0.464 0.504 0.536 0.648 0.720 0.848 1
6. Análisis de estabilidad a. Espacio de Estados
Una manera de analizar sistemas de ecuaciones diferenciales como los obtenidos en el
apartado 4, es mediante su representación en el espacio de estados (forma matricial), para
ello se parte de la ecuación (43).
�̇� = 𝐴𝑥 + 𝐵𝑢 (43)

En donde A es la matriz que depende de los parámetros concentrados del sistema, B es la
matriz de entrada del sistema, U es el vector de entrada, X es el vector de estado. Teniendo
en cuenta la ecuación (4) se expresó el sistema como una matriz de estados.
[
𝑑𝑥𝑑𝑡⁄
𝑑𝑦𝑑𝑡
⁄] = [
0 1
−2
3
(1 − 2𝑢)
𝑢(1 − 𝑢)0
] [𝑥𝑦] − [
00
] 𝐵
(44)
b. Exponentes Máximos de Lyapunov
Los exponentes de Lyapunov se han utilizado ampliamente en ingeniería como herramienta
para el estudio cualitativo de la estabilidad de un sistema de tiempo continuo o discreto; ellos
miden la tasa exponencial de divergencia de dos órbitas adyacentes en el espacio de
fases,[21].
Sea 𝑑𝑥(𝑡)
𝑑𝑡= 𝐹(𝑥) en donde 𝑥(0) = 𝑥0. Sea 𝑥(𝑡, 𝑥0) la solución de (18), si se adiciona una
perturbación en la condición inicial del sistema ∆𝑥0, esta quedaría 𝑥(𝑡, 𝑥0 + ∆𝑥0); ahora,
mediante series de Taylor se verifica que el error entre las dos soluciones debe cumplir que:
∆𝑥(𝑡) = 𝑥(𝑡, 𝑥0 + ∆𝑥0) − 𝑥(𝑡, 𝑥0) ≅ 𝐽𝑥0(𝑥(𝑡, 𝑥0))∆𝑥0 (45)
𝐽𝑥0(𝑥(𝑡, 𝑥0)) es el Jacobiano de la ecuación solución evaluado en el punto (𝑡, 𝑥0); por lo tanto,
la separación de las dos trayectorias es:
‖∆𝑥(𝑡)‖ = ‖𝐽𝑥0(𝑥(𝑡, 𝑥0))‖‖∆𝑥0‖ = lim
𝑡→∞‖∆𝑥0‖𝑒𝜆𝑡 (46)
En donde 𝜆 se define como el máximo exponente de Lyapunov, de (19) se obtiene:

𝜆 = lim𝑡→∞
[ lim∆𝑥0→0
1
𝑡‖𝐽𝑥0
(𝑥(𝑡, 𝑥0))‖‖∆𝑥0‖] (47)
Para una ecuación diferencial de orden n, indica que existen n exponentes de Lyapunov
asociados a esta, además, un exponente negativo implica que el punto de equilibrio
seleccionado es estable, las señales convergen hacia dicho punto; un exponente positivo
indica la presencia de caos en el sistema; por lo tanto, un exponente positivo, puede mostrar
la sensibilidad a las condiciones iniciales.[22][23]
A continuación se implementó un algoritmo para calcular los exponentes de Lyapunov en la
ecuación diferencial de Cardy,[23]. En la Figura 28 se evidencia el comportamiento del sistema
y en la Tabla 5 se muestran los exponentes de Lyapunov demostrando que 𝑥 presenta
estabilidad debido a que sus exponentes son negativos y 𝑦 demuestra instabilidad debido a
que sus exponentes son positivos.
Figura 28: Exponentes de Lyapunov en la ecuación de Cardy. Elaboración propia.

Tabla 5: Exponentes de Lyapunov variables de salida 𝒙 y 𝒚. Elaboración propia
Tiempo(s) Exponentes de Lyapunov Variable (𝑥)
Exponentes de Lyapunov Variable (𝑦)
0,011 -0,000304279 0,000304279
0,101 -0,00304831 0,00304831
0,201 -0,006109972 0,006109972
0,301 -0,009186706 0,009186706
0,401 -0,012280257 0,012280257
0,501 -0,015392401 0,015392401
0,601 -0,018524948 0,018524948
0,701 -0,021679747 0,021679747
0,801 -0,024858689 0,024858689
0,901 -0,028063713 0,028063713
1,001 -0,031296809 0,031296809
7. ANÁLISIS Y RESULTADOS
A continuación en la Tabla 6 se observa la comparación de los diversos métodos de
solución de la ecuación de Cardy, así mismo se comparará cada método con la solución
teórica(integral de Cardy), de esta manera se obtiene un margen de error.
Tabla 6: Comparación métodos de solución ecuación de Cardy. Elaboración propia.
𝒙 Hiper % Circuito % RK4 % Simu % Integral
0.1 0.267 3.488 0.240 6.976 0.235 8.914 0.234 9.302 0.258
0.2 0.343 5.769 0.304 16.483 0.326 10.439 0.317 12.912 0.364
0.3 0.401 3.373 0.384 7.469 0.390 6.024 0.382 7.951 0.415

0.4 0.452 0.000 0.464 2.654 0.445 1.548 0.440 2.654 0.452
0.5 0.500 0.000 0.504 0.800 0.486 2.800 0.495 1.000 0.500
0.6 0.548 1.481 0.536 0.740 0.550 1.850 0.549 1.666 0.540
0.7 0.598 0.333 0.648 8.000 0.606 1.000 0.604 0.666 0.600
0.8 0.656 1.391 0.720 11.282 0.666 2.936 0.670 3.554 0.647
0.9 0.732 4.062 0.848 11.140 0.755 1.048 0.765 0.262 0.763
1.000 0.910 9.000 1.000 0.000 0.987 1.300 1.000 0.000 1.000
De esta manera observamos que, aunque la función hipergeometrica no alcanza a llegar a 1,
es la función que más se acerca al valor de la integral, es decir, los datos teóricos debido a su
bajo índice porcentual de error.
8. CONCLUSIONES
Implementando el mapeo de Schwarz Christoffel sobre un triángulo equilátero se dedujo la
ecuación integral que describe el fenómeno de percolación.
De acuerdo con los máximos exponentes de Lyapunov se analizó la presencia de caos,
concluyendo que existe estabilidad en la variable independiente de la ecuación diferencial
de Cardy e inestabilidad en la variable dependiente, lo que representa perfectamente el
comportamiento del sistema a lo largo del dominio.
Se solucionó la ecuación de Cardy por diversos métodos, llegando en todos los casos a la
gráfica solución con un pequeño margen de error respecto a la solución teórica(integral),

aunque se evidencia en la Tabla 6 que el método de aproximación más efectivo fue la
función hipergeométrica de Gauss.
Se obtuvo la respuesta electrónica de la ecuación de Cardy, con lo que se evidenció un
pequeño margen de error, de esta manera se garantiza que puede ser una manera de
solucionar la ecuación diferencial de Cardy.
9. REFERENCIAS
[1] “Runge Kutta 4th order ode - File Exchange - MATLAB Central.” [Online]. Available:
https://www.mathworks.com/matlabcentral/fileexchange/29851-runge-kutta-4th-order-
ode?focused=3773771&tab=function. [Accessed: 08-Jan-2018].
[2] V. K. S. Shante and S. Kirkpatrick, “An introduction to percolation theory,” Adv. Phys.,
1971.
[3] G. W. Grimmett, Richard D. James, Mathematics of Multiscale Materials. .
[4] T. Purevdorj, “THE CARDY-SMIRNOV FORMULA 1. Description of the Problem,” City,
vol. 1, pp. 1–6, 2001.
[5] K. Christensen, “Percolation theory,” Coexistence, 1982.
[6] R. Langlands, P. Pouliot, Y. Saint, and -Aubin Contents, “Conformal invariance in two-
dimensional percolation * by.”
[7] J. Cardy, “Critical percolation in finite geometries,” J. Phys. A. Math. Gen., vol. 25, no. 4,
pp. L201–L206, 1992.
[8] S. Smirnov, “Critical percolation and conformal invariance,” pp. 99–112, 2005.
[9] “Algunas representaciones simples de la función hipergeométrica generalizada.”
[10] J. Cardy, “SLE for theoretical physicists,” Ann. Phys. (N. Y)., vol. 318, no. 1 SPEC. ISS.,

pp. 81–118, 2005.
[11] O. Schramm, Scaling limits of loop-erased random walks and uniform spanning trees, no.
April. 1999.
[12] M. R. Palavecino, P. Centres, and C. S. Páez, “Simulación de un Modelo de Percolación
basado en FPGA,” no. uEA, pp. 65–71, 2013.
[13] J. Hasenbusch and M. Wilhelm, “Project in Computational Physics PERCOLATION,”
2011.
[14] L. Wen and M. Zhang, “A theoretical and numerical study on percolation mechanism of
carbon nanotube network,” 2016 IEEE 16th Int. Conf. Nanotechnol., vol. 1, pp. 959–962,
2016.
[15] G. Voutsadakis, “Conformal Mapping Conformal Mapping Linear Fractional
Transformations Schwarz-Christoffel Transformations,” 2014.
[16] “M ´,” pp. 8–9.
[17] R. Seminario, “Metodos Númericos Para Ingenieria,” Libro.
[18] “Runge Kutta 4th order ode - File Exchange - MATLAB Central.” [Online]. Available:
https://la.mathworks.com/matlabcentral/fileexchange/29851-runge-kutta-4th-order-
ode?focused=3773771&tab=function. [Accessed: 19-Jan-2018].
[19] B. De Matematicas, “SOLUCION DE UNA ECUACION DIFERENCIAL
HIPER6EOMETRICA Ixl,” vol. XVII, pp. 42–57, 1983.
[20] L. F. Hipergeométrica, “Sumas Binomiales Y Funciones Hipergeométricas,” 2009.
[21] M. Flohr and A. Müller-Lohmann, “Proposal for a CFT interpretation of Watts’ differential
equation for percolation,” 2005.

[22] J. D. Cartas Ayala, Evidencia Experimenal de un Oscilador Caótico Conmutado. México
D.F., 2010.
[23] G. Vasiliy, “Calculation Lyapunov Exponents for ODE - File Exchange - MATLAB
Central,” 2004. [Online]. Available:
https://www.mathworks.com/matlabcentral/fileexchange/4628-calculation-lyapunov-
exponents-for-ode. [Accessed: 04-Apr-2017].