Model Validation for Dynamically Uncertain

of 17
-
Upload
juan-manuel-mauro -
Category
Documents
-
view
217 -
download
0
Transcript of Model Validation for Dynamically Uncertain
-
8/13/2019 Model Validation for Dynamically Uncertain
1/17
This article was downloaded by:[Consorci de Biblioteques Universitaries de Catalunya]On: 1 February 2008
Access Details: [subscription number 789296669]Publisher: Taylor & FrancisInforma Ltd Registered in England and Wales Registered Number: 1072954Registered office: Mortimer House, 37-41 Mortimer Street, London W1T 3JH, UK
Mathematical and Computer Modelling of Dynamical SystemsMethods, Tools and Applications in Engineeringand Related SciencesPublication details, including instructions for authors and subscription information:http://www.informaworld.com/smpp/title~content=t713682513
Model validation for dynamically uncertain systemsRoy Smith a ; Geir Dullerud b; Sundeep Rangan c; Kameshwar Poolla da Department of Electrical & Computer Engineering, University of California, SantaBarbara, U.S.A.b Department of Applied Mathematics, University of Waterloo, Waterloo, Ontario,Canadac Department of Electrical Engineering, University of California, Berkeley, CA, U.S.A.d Department of Mechanical Engineering, University of California, Berkeley, CA, U.S. A.
Online Publication Date: 01 January 1997To cite this Article: Smith, Roy, Dullerud, Geir, Rangan, Sundeep and Poolla, Kameshwar (1997) 'Model validation for dynamically uncertain systems', Mathematical and Computer Modelling of Dynamical Systems, 3:1, 43 - 58To link to this article: DOI: 10.1080/13873959708837048URL: http://dx.doi.org/10.1080/13873959708837048
PLEASE SCROLL DOWN FOR ARTICLE
Full terms and conditions of use: http://www.informaworld.com/terms-and-conditions-of-access.pdf
This article maybe used for research, teaching and private study purposes. Any substantial or systematic reproduction,re-distribution, re-selling, loan or sub-licensing, systematic supply or distribution in any form to anyone is expresslyforbidden.
The publisher does not give any warranty express or implied or make any representation that the contents will becomplete or accurate or up to date. The accuracy of any instructions, formulae and drug doses should beindependently verified with primary sources. The publisher shall not be liable for any loss, actions, claims, proceedings,demand or costs or damages whatsoever or howsoever caused arising directly or indirectly in connection with or arising out of the use of this material.
http://www.informaworld.com/smpp/title~content=t713682513http://dx.doi.org/10.1080/13873959708837048http://www.informaworld.com/terms-and-conditions-of-access.pdfhttp://www.informaworld.com/terms-and-conditions-of-access.pdfhttp://dx.doi.org/10.1080/13873959708837048http://www.informaworld.com/smpp/title~content=t713682513 -
8/13/2019 Model Validation for Dynamically Uncertain
2/17
D o w n l o a d e d B y : [ C o n s o r c i d e B i b l i o t e q u e s U n i v e r s i t a r i e s d e C a t a l u n y a ] A t : 1 4 : 4 1 1 F e b r u a r y 2
Mathematical Modellingof Systems1997 Vol. 3, NO. I pp. 43-58
l38l-2424/97/O3OI-43 l2.O0@wets Zeitlinger
Model Validation for Dynamically Uncertain
Systems
ROY SMITH , GEIR DU LL ER UD ~, UNDEEP RANGAN ANDKAMESHWAR POOLLA
ABSTRACT
Robust control models describe system uncertainty with both unknown additive signals andunknown d ynamic perturbations. These unknown but bounded components lead to a model setdescription. Model validation is the experimental assessme nt of the ability of this model setto describe the observed system behaviors. In this paper we consider model validation forH,compatible models.
This paper provides a detailed presentation of theH, model validation problem in thediscrete frequency, discrete-time, and sam pled-data frameworks. In each case the underlyingresults and the computational algorithms are discussed. The experimental applicability and thecomputational consequences are discussed in sufficient detail to give the reader an appreciationof the issues surrounding each modelJexperiment framework.
Keywords: identification, model validation, robust control, uncertain systems.
1 INTRODUCTION
In this paper we address the problem of mod el validation for robust control models.Such mo dels are set descriptions where the sets are generated by unknow n but boundeddynam ic perturbations and unknown but bounded noise and disturbance signals. T hereare several robust control design frameworks using perturbation models; for exa mpleH,lstructured singular value I*.) I , 2,3]and [4]approache s. The H,lp framewo rkwill be the focu s of this paper.
Mod el validation is a misnomer; it is never possible, on the basis of a finite numberof experiments, to validate a model. On the other hand finding a single experimen t
*Departmentof Electrical Computer Engineering, University of California, Santa Barbara, CA 931 06,U.S .A. Tel. +1-805-893-2967. E -mail: [email protected] .edu
+Departmentof Applied Mathematics, University of Waterloo, Waterloo, Ontario, CanadaN2L 3Gl .*Department of Electrical Engineering, University of California, Berkeley, CA 94720, U.S.A.Department of M echanical Engineering, University o f California, Berkeley, CA 94720 , U .S .A . Tel.
+1-510-642-4642.E-mail: poolla@jagger berkeley edu
-
8/13/2019 Model Validation for Dynamically Uncertain
3/17
-
8/13/2019 Model Validation for Dynamically Uncertain
4/17
-
8/13/2019 Model Validation for Dynamically Uncertain
5/17
D o w n l o a d e d B y : [ C o n s o r c i d e B i b l i o t e q u e s U n i v e r s i t a r i e s d e C a t a l u n y a ] A t : 1 4 : 4 1 1 F e b r u a r y 2
ROY SMITH ET AL.
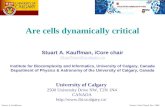
Fig 1. Model validation frameworks.a Generic L T ase. b Simplified structure.
Testing the assumption that the perturbations are norm b ounded by unity is withoutloss of generality as P can be scaled.
The above model validation problem is stated in its most general form.In thiswork we will restrict ourselves to the norm bou nds given as
where w ( t ) denotes the transpose of a vector valued signal, and,
We also co nsider discrete-time and sampled-data frameworks where2 is the set ofdiscrete sequences of bo unded energy and12[0 N will deno te finite length Nsequences of bounded energy.
These choices of norm correspond to the comm only used H,lstructured singularvalue p ) obust control framew ork [3, 291. Other norm choices, and mixed normrobust design problems are of interest see for example[4 30,311). M odel validationin these other areas is far less well developed. See [32] for some very preliminaryresults.
-
8/13/2019 Model Validation for Dynamically Uncertain
6/17
D o w n l o a d e d B y : [ C o n s o r c i d e B i b l i o t e q u e s U n i v e r s i t a r i e s d e C a t a l u n y a ] A t :
1 4 : 4 1 1 F e b r u a r y 2
MODEL VALIDATION FOR DYNAMICALLY UNCERTAIN SYSTEMS 7
We will focus on the following model; a special case of the abov e.
where P,, nd z are frequency dependent weighting functions on the output andinput of the perturbation respectively. Figure l b illustrates this framewo rk. Whileit is not the general case, by appropriate choice ofP, and P, this m odel framework
includes the most com monly applied cases: additive and input or output multiplicativeperturbations. This model structure is equivalent to considering LFT mo dels withP,1 = nd the map from w to being zero. T he theoretical framework describedhere can be applied to the generalLFT case; however we will focus on the simplifiedmodel case as it is necessary to obtain convex optimization problems, and allows asimplified presentation.
We can po se the m odel validation problem in terms of accounting for a residual,r = P,,,,u. In other words, does there exist A and w, of appropriate size,satisfying
Note that Pn,, need not be linear. We w ill assume thatP,,, nd P, have LTI state-spacerepresentations and that = z u can be calculated from the known input.
Subsequent sections consider this problem in several domains; the do main beingdetermined by the form of the model and the datum. These are the discrete frequency,the discrete-time, and the sampled-data domain. Each has significantly differentconsequences for the experimental configuration, and the computability of the result.
In each case the first issue to address is obtaining a com putable characterizationof the unknown perturbation, A This is translated to an equivalent, computable,condition on the input and output signals andv respectively. These results are know nas extension conditions. Once this is done an optimization problem can be se t up tofind the smallest perturbation, and smallest noise, accounting for the residual in4).Th e optimization variables arew and v and consistency with the datum is enforced by
considering 4) as a constraint. We discuss the properties of this optimiza tion in eachcase, as they differ significantly between the dom ains. The experimental consequencesof the chosen domains are also discussed at length.
This can be viewed as an open-loop problem in that we are check ing the con-sistency of a dynamically uncertain model, with noise, with respect to an observedinput-output pair y,u). n practice the input, u, may be generated by a controller inclosed-loop operation; we assum e only that it is measured or known . In contrast tothe standard identification theory, the validation test applies to a single experimentaldatum and there is no need to require thatu and any consistent noise be uncorrelated.In a worst-case framew ork the smallest consistentw will be correlated with u. Thismakes the application of this form of model validation test applicable to both open-
-
8/13/2019 Model Validation for Dynamically Uncertain
7/17
D o w n l o a d e d B y : [ C o n s o r c i d e B i b l i o t e q u e
s U n i v e r s i t a r i e s d e C a t a l u n y a ] A t : 1 4 : 4 1 1 F e b r u a r y 2
48 ROY SMITHET AL.
and closed-loop experim ents, and therefore useful for assessing mode l consistency aspart of an iterative identification and design s cenario.
3 FREQUENCY DOMAIN FORMULATION
Problem 1 is now formulated in a discrete frequency domain setting. The input-outputdatum c onsists ofN vector valued samples, y, u )= { u k , k ; k = 0 , , N ). Themodel, P is given in the discrete domain,
where pk are the pulse response coefficients. By applying aDFT to the input-output datum, y ,u) , we obtain a periodogram representation, Y U ) = { Y,, U,) ;
j an
n = 0 , . , N . At each discrete frequency,e - 7 , the perturbation, A,, is acomp lex valued matrix of the appro priate block structure.
Consid ering the simplified model, 3 ) , he input-output constraint, 2), is expressed2 m
at each frequency, e - 7 , n=
0 ,.
N by the conditions,
where A E C d i m v ) x d i m z )nd A A The extension condition expressed in thefollowing lem ma is trivial, but illustrates the form of the ex tension conditions that w illappear in subsequent sections.
Lemma 2 Given requency domain DFTsequenc es,V = {V,; n = 0 , . , N )andZ = 2, ; n = O , . . . , N - 1 ) ; f o r e a c h n = O , . . . , N - l t h e r e e x i s t s A s a t i s f i i n gV = A,Z,, and sup, 6 A,) 1 ifan d only
VlV, Z,*Z,.
Here denotes the complex conjugate transpose and ) denotes the maximum singularvalue. The m odel validation result is expressed in the following.
Theorem 3 Given a model of the form 3 ) , and a frequency domain input-outputda tum, Y,U)= { Y,, U,); n = 0 , , N ). The datum invalidatesthe model if;forall sequences W and V satishing 5 )and V,* V 5 Z,*Z,, n = 0, . . . , N - I;
-
8/13/2019 Model Validation for Dynamically Uncertain
8/17
D o w n l o a d e d B y : [ C o n s o r c i d e B i b l i o t e q u e s U n i v e r s i t a r i e s d e C a t a l u n y a ] A t : 1 4 : 4 1 1 F e b r u a r y 2
MODEL V LID TION FOR DYN MIC LLY UNCERT IN SYSTEMS 49
Theorem 3 can be tested by applying the following optimization problemN timesi.e. for each n = 0 . N - I).
subject to:
In the above y? is the size of the minimum Wn accounting for the datum at thefrequency e - w . As the minimizing Wn are independent at each frequency theminimum W z is given by
Clearly, if yo* > 1 the datum invalidates the model. Note also thatyap gives a usefulmeas ure of the degre e by which the datum invalidates the model.
This optim ization problem has som e major advantages. To begin note that it is aquadratic objective with convex quadratic and linear constraints. Theref ore there areno local minima. Note also that the size of each problem is the sum of the compon entdimens ions of Wn and V,. Furtherm ore the problem complexity is linearly related tothe amou nt of data taken.
In the generalL T case as illustrated in Figure la ) the solution of the approp ri-ate optimization problem is simply a structured singular value optimization withanadditional equality constraint arising from 5) and 7). A convex upper bound can beformu lated in terms of a linear matrix inequality LMI) optim ization and this gives anattractive com putational approach[33].
The disa dvantage of the discrete frequency domain is thatit places constrain ts onthe form of the experim ent. The cond itions on the signals that make the time dom ainconstraint 4) equivalent to the frequency domain input-output constraint,5 ) ,are: v isperiodic or zero for negative time, orP is s tatic; andw is periodic or zero fo r negativetime, or P is static. Experiment design can make periodic or zero for negative timeby ap plying the same conditions tou. However, such an assumption on the unknownsignal w is much less palatable. To get an exact match between the frequ ency andtime dom ains we must limit ourselves to m odels in whichP is static. Fo rtunately thefrequenc y dom ain constraint s always an approxima tion o the underlying time domainconstraint. As N increases , so does the accuracy of this approxim ation, making thisdoma in useful from an engineering point of view.
-
8/13/2019 Model Validation for Dynamically Uncertain
9/17
D o w n l o a d e d B y : [ C o n s o r c i d e B i b l i o t e q u e s U n i v e r s i t a r i e s d e C a t a l u n y a ] A t : 1 4 : 4 1 1 F e b r u a r y 2
5 ROY SMITH ETAL.
An ap plication of this method to a process con trol problem is des cribed in[23],where experim ental model validation is used to select between two cand idate robustcontrol models.
4 DISCRETE TIME DOMAIN FORMULATION
A purely time-domainformu lation avoids the potential frequency domain experime ntalissues raised in Sec tion3. We will consider a discrete-tim e model and a d iscrete-timeinput-output datum, y, u )= { y k , k );k = 0 , . , N 1 .
Several preliminary definitions are needed. For a sequence of vectors v ={v Rm; n = 0 N - let V R m N x denote the associated lower blockToeplitz matrix definedas
Note that V is real valued and V will denote its transpose. LetSm denote the setof one sided sequences with elements inRm. Define the 1-step truncation oper ator,n : m -+ S m , y c onsidering the kth elem ent ofn u to be
The time d omain LTI perturbation approac h is based on the follow ing extensionresult [24], which is analogous to L emma2. For slightly more gen erality we introducethe assumed norm bound onA as y.
heorem 4 Given sequences, u = {uk E Rdim( )} lz and z = {zk R ~ ~ ~ ( ~ ) }12, there exists a stable, linear, time-invariant, causal operator A : 12 12 with
A ll,. 5 y , such that, E N - ] v = A E N - ~ Z fan d onlyV V L y2z z , 9)
where V and Z are dejined from n ~ - I and n ~ - 1 as in 8).
We aga in consider the simplified model in 3) . To formulate the m odel validationproblem, consider analogous input-output equations to those given in(5) and (7).These are now in ma trix form, based on the pulse response coefficients of theP,, P,and P, systems.
-
8/13/2019 Model Validation for Dynamically Uncertain
10/17
D o w n l o a d e d B y : [ C o n s o r c i d e B i b l i o t e q u e s U n i v e r s i t a r i e s d e C a t a l u n y a ] A t : 1 4 : 4 1 1 F e b r u a r y 2
MODEL VALIDATION FOR DYNAMICALLY UNCERTAIN SYSTEM S 5 1
where v denotes the vectorv = [vo, . . VN-I] , etc., and the pulse respon se coefficientmatrices are given by (for example),
Pvl pvo .1 =
with pui denoting the ith pulse respo nse coefficient ofP,. We can cons ider the effectof nonzero signalsw in negative time by adding to (10) a term mapping an unknowninitial cond ition of P, to r.
The following theorem follows from Theorem4 and gives the desired modelvalidation result.
Theorem 5 Given a m odel of the form 3), and a discrete-time input-output datum,y, u ) = { y k , uk) ; k = 0 . N- I). The datum invalidates the model or all
sequences w and v 12[0,N 11satisfying (10)and
V V 5 Z Z,
also satisfyIlwll > 1
As we would ex pect, an optimization approach can be used to check Theo rem5.In this case we have the following single optimization problem.
subject to:
where Z is formed from z = p, u , as in 8).In the above yo* is the minimum norm perturbation and noise acc ounting for the
datum. If yopt > 1, the datum invalidates the model.In the simp lified model structure (illustrated in Figure Ib and4)) Z Z is a con-
stant matrix and this optimization problem is convex. Mu ltiple perturbations can beconsidered by includingan appropriate constraint of the form (12) for each.A convexproblem w ill result as long as the inp ut of each perturbation is known; which is equiv-alent to having P = nd the mapping from w to z being zero in the gen eralLFT
-
8/13/2019 Model Validation for Dynamically Uncertain
11/17
-
8/13/2019 Model Validation for Dynamically Uncertain
12/17
D o w n
l o a d e d B y : [ C o n s o r c i d e B i b l i o t e q u e s U n i v e r s i t a r i e s d e C a t a l u n y a ] A t : 1 4 : 4 1 1 F e b r u a r y 2
MODEL VALIDATION FOR DYNAMICALLY UNCERTAIN SYSTEMS
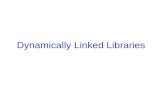
Fig. 2 Lifting operation.
only assume that u t ) s known, and not necessarily the output of a hold operator. Inorder to have a m eaningful problem P, and P are assume d to be strictly causal.
Before proceeding we require some definitions. For continuous time signals,u t ) E C2[0, O , we define a truncation operator, ll y,
We now proceed to define a lifting operator. Our goal is now to define an iso-morphism between [0, 0 0 and lz(Cz[O, T ) ) , he space of sequences of squareintegrable functions each defined on [0, T , T r 0. Define AT L2[0, co -/2( [0, T ) to be the map that takes a signald L2[0, o o the sequen ce of signalsdk = ( A ~ d ) k [ 0 , T ) via
( (t) = d t k T ) f o r k , t [0, T ) . 13)
Intuitively, A T can be viewed as splitting a continuous function into a sequence offunctions of length T. This operation is illustrated conceptually in F igure2. ClearlyA,' is w ell-defined, and IlAj-ll = llh; lI = 1, so AT is an isometric isomorphism.For clarity we will often dropthe component dimension superscript when using thisnotation.
The residual constraint equations are now,
-
8/13/2019 Model Validation for Dynamically Uncertain
13/17
D o w n l o a d e d B y : [ C o n s o r c i d e B i b l i o t e q u e s U n i v e r s i t a r i e s d e C a t a l u n y a ] A t : 1 4 : 4 1 1 F e b r u a r y 2
5 ROY SMITH ET AL
where r and u l2 O N-11. We now app ly the lifting operation, defining := AT v t ) ,tit := AT w t ) ,and = AT z t ) ,which results in,
The essential feature of this step is that the operators in 1 6 ) and 17) are finitedimensional and have a state-space representation. We can therefore associate each5 12 .C2[0, ) )not in the null space ofSTP,A; with a sequence in12. Denote thisoperation by, r,G = G 12. Applying this to all lifted signals gives the followingdiscrete-time formulation,
where we now haver , G , , nd u in 12[0,N- I ] . Calculation of the resulting discrete-time state-spac e representations involve the solution of a Lyapunov equation a nd are
given in m ore detail in1261. Once this has been accom plished the discrete-time resultsof the previo us section can be used to establish a sufficient condition for inv alidation.This appro ach is similar to that used in the sampled -dataH , design problem [36].
We can again account for nonzerow in negative time by including the Hankeloperator mappingw t ) , to T Pw w, t L 0 in 14) . This operator is also finitedimensional and its null space can removed giving a discrete-time operator from12,k < to 12[0,N - 1 ] which can be inc luded in 18) .
The lifting operation can be applied aroundA, and applying Theorem4 gives thefollowing extensio n result.
Theorem 7 If there exists a stable, causal, lineac time-invariant, A, A lo y andz t ) Image P, H T ) c Lz hen v t ) = A z t ) satisfies, for allT > 0 ,
'+ < y 2 i r i 20)
where 9 and 2 are defined from the 12[0 ,N - I ] sequences = r y AT 1 7 h r - l ) T ~ t ) ,and 2 = r z A T I l N - I j T ~ t )s in 8).
This resu lt becomes necessary and sufficient in the limit asT t 0 see [37]) .Note thatwe can obtain an analogous result for time-varying perturbationsby applying insteadTheorem 6 .
Th e LTI model validation result is the following .
Theorem 8 Given a model of the form 3), and a sampled input-output datum, y, u)= { y k , k ) ;k = 0 , . N - I) . The datum invalidatesthe model iJ;for all sequencesI J and G 1210, N - 1] satisfying 18 )and (20); I JI2> 1.
-
8/13/2019 Model Validation for Dynamically Uncertain
14/17
D o w n
l o a d e d B y : [ C o n s o r c i d e B i b l i o t e q u e s U n i v e r s i t a r i e s d e C a t a l u n y a ] A t : 1 4 : 4 1 1 F e b r u a r y 2
MODEL VALIDATION FOR DYNAMICALLY UNCERTAIN SYSTEMS
As we would expect this can be solved by the following convex optimizationproblem.
y opt m:ln YY , W , V
21)
subject to:
where is formed from AT ~ ( N - I ) T z ( ~ )s in 8). Due to the sufficiency of theextension conditionyop is a lower bound on the minimum norm LTI perturbation andnoiseldisturbanceaccoun ting for the datum. This bound is appropriate for our purposesas if yOp > 1 the datum invalidates the m odel with respec t to continuo us-time LTIperturbations and continuous time noiseldisturbance signals.
The co mputa tional machinery used to solve the time dom ain optimization problemis directly applicable to this problem. The sam e comm ents about convexity and struc -
tural constraints apply here also. However the sampled-da ta framework also allowsfor the formulation of m ore easily calcula ted sufficient conditions for invalidation. Inthe above optimizationyOp is a lowe r bound on the norm of all c ontinuous-tim e per-turbation and noise com binations which drive the system output through the measuredsample values. Clearly we need not consider all of the available samples and using adecim ated subset will give a lower bound onyOp . This is also a sufficient conditionfor invalidation and is form alized in the follow ing algorithm.
i) Set 1 and select a subsampling period T T .
ii) Decimate the datum y w ith period T to give a subsampled datum y .
iii) Calculate the minimumy Y tfor the subsampled datum, (y l ,u ) ia the optimiza-tion in (21 )using T in place of T .
iv) fet 1 then the subsampled datum yJ , ,u ) nvalidates the LTIperturbationmodel. (stop).
v I ~ T T then the datum does not invalidate the LTIperturbation model. (sto p).
vi) Increment 1 select T T - , and go to step ii).
Step iii) finds the minimum norm A , and minimum norm w accounting forobservation on a subset of the datum. Note that if each datum subset contains allpoints of the previous datum subset thenY; is monotonically non-decreasing asthe iteration 1, increases. If the model is invalidated on a subset of the datum it is
-
8/13/2019 Model Validation for Dynamically Uncertain
15/17
D o w n l o a d e d B y : [ C o n s o r c i d e B i b l i o t e q
u e s U n i v e r s i t a r i e s d e C a t a l u n y a ] A t : 1 4 : 4 1 1 F e b r u a r y 2
6 ROY SMITH T AL
invalidated on the entire datum. The advantage of this approach is that it begins withsmall fast optimization problem s. An exp erimen tal application is described in[28]using this approac h and in this case only a sma ll fraction of the datum is required toinvalidate the mod el. It is also possible to calculate an upper bou nd on the differen cebetween Optand yop', making this approach practical.
6 DISCUSSION
The time-domain approaches described above are the more ex perimentally appealing.While it is possible to develop convex algorithms for solving the associated optimiza-tion problems these algorithms are computationallyprohibitive. Any LMI formulationusing the entire datum from a typical experiment will not be feasible with the currentstate of the art in optimization or com puter technology. The sampled-data approachprovides a natura l framewo rk for considering subsets of the datum which enab les thecalculation of bound s onyo'''. If both bounds are either above or below one the datumdoes or does not invalidate the model. It would be rare in an enginee ring situationthat the entire datum would need to be used to make such a distinction or that such afine distinction would be of pra ctical use.
The drawback of the time-domain approaches is the loss of convexity or convexbounds in the generalLFT model case. Here the frequency domain approach can beused albeit with somewh at less appealing approximations with respect to the finitedatum collected from the e xperiment.
The model validation methods presented here a re a useful component in the typi-cally iterative proced ure of modeling identification design and experimen tal assess-ment for control system development. The issues of how to modify the mode l in thecase that it is invalidated; or how to exploit additional confidence provided by mode lvalidation when redesigning the controller are not directly addresse d here. Such issuesare problem d epend ent and will involve significant enginee ring u dgem ent.
The fact that the m odel validation problem for dynamic uncertainties can be posedas an op timization problem is promising from the point of view of ide ntification. Wecan now include model parameters as additional optimization variables and considerthe problem of finding the model that describes the datum with the smallest amountof noise and dynam ic uncertainty. The convexity issues discussed above will becom pounde d by the model parametriza tion. Convexity will be preserved in the discreteor sam pled-data domains only by linear model parametrizations; for exampleFIRLaguerre Kautz or generalized linear models[38] On the other hand if we wish touse these approaches for the fine-tuning of model initially estimated by other meansthen the loss of convexity may not be critical. The extension of this work to parame tricidentification is a promising area for future research.
-
8/13/2019 Model Validation for Dynamically Uncertain
16/17
D o w n l o a d e d B y : [ C o n s o r c i d e B i b l i o t e q u e
s U n i v e r s i t a r i e s d e C a t a l u n y a ] A t : 1 4 : 4 1 1 F e b r u a r y 2
MODEL VALIDATlON FOR DYNAMICALLY UNCERTAIN SYSTEMS
ACKNOWLEDGEMENTS
Thi s work was supported in part by the National Science Foundation under Grants ECS 89-57461and EC S 93-8917, by AFO SR, and by gifts from Rockwell International.
REFERENCES
1. Doyle, J., Glover,K., Khargonekar, P., and Francis,B. State-space solutions to standardH and H control problems, IEEE Trans. Auto. Control,vol. AC-34, pp. 831-847, 1989.
2. Green, M. and Limebeer, D.J.N.Linear Robust Control.Prentice-Hall, 1995.3. The Mathworks, Inc., Natick, MA,p-Analysis and Synthesis Too lbox(p-To ols),1991.4. Dahleh, M.A. and Diaz Bobillo,I.J. Control of Uncertain Systems; A Linear P rogramming
Approach. Prentice-Hall, 1995.5. Ljung, L. System Identijication, Th eory for the U ser.Information and System Sciences
Series, New Jersey: Prentice-Hall, 1987.6. Schram a, R.J.P. Accurate identification for control: the necessity of an iterative scheme,
IEEE Trans. Auto. C ontrol,vol. 37, pp. 991-994, July 19 92.7. Zang, Z., Bitmead, R.R., and Gevers, M. H2 iterative model refinement and control
robustness enhancement, inProc. IEEE Control Decision Con$,pp. 279-284,
1991.8. Lee, W.S., Ande rson, B.D.O ., Kosut, R.L., and Mareels, I.M.Y. A new approa ch toadaptive robust control, Int. J. ofAd apt. Control Sig. Proc.,vol. 7, pp. 183-2111993.
9. Goodwin, G., Ninness, B., and Salgado, M. Quantification of uncertainty in estimation,in Proc. Amer: Control Con$,pp. 2400-2405, 1990 .
10. Parker, P.J. and Bitmead , R.R. Adaptive frequen cy response identification, inProc. IEEEControl Decision Con$,pp. 348-353, 1987.
11. Helmicki, A.J., Jacobson, C.A., and Nett, C.N. Control oriented system identification:Aworst-caseldeterministicapproach in H IEEE Trans. Auto. Control,pp. 1163-1176, 1991.
12. Gu, G. and Khargonekar, P.P. Linear and nonlinear algorithms for identification inH Mwith error bounds, IEEE Trans. Auto. C ontrol,vol. 37, pp. 953-963, 1992.
13. Miikila, P. and Partington ,J. Robust app roximation and identification inHw, Proc. Amer.Control Con$,pp. 70-76, 1991.
14. Bai, E.-W. On-line H 2 HW and pointwise uncertainty b ound q uantification in identifi-cation of restricted comp lexity models, inProc. IEEE Control Decision Con$,pp. 1719-1724, 1992.
15. Schied, R., Bayard, D.S., and Yam, Y. A lin ear progra mmin g appro ach to characterizin gnorm bounded uncertainty from experimental data, inProc. Amer: Control Con$,pp. 1956-1958, 1991.
16. Hakv oort, R.G., Schrama, R.J.P., and Van den Hof, P.M.J. Appro ximate identificationwith closed-loop performance criterion and application to LQ G feedback design,Automatica,vol. 30, no. 4, pp. 679-690, 1994.
17. Thapliyal,S., Faitakis, Y., and Kantor, J. A model validation approach to fault detection,in Proc. Amer: Control Con$,pp. 3027-3028, 1994.
18. Kosut, R., Lau, M., and Boyd,S Parameter set identification of systems with uncertainnonparametric dynamics and disturbances, inProc. IEEE Control Decision Con$,vol. 6, pp. 3162-3167, 1990.
-
8/13/2019 Model Validation for Dynamically Uncertain
17/17
D o w n l o a d e d B y : [ C o n s o r c i d e B i b l i o t e q u e s U n i v e r s i t a r i e s d e C a t a l u n y a ] A t :
1 4 : 4 1 1 F e b r u a r y 2
8 R Y SMITHET AL
19. Krause, J.M. and K hargonekar, P.P. Parameter identification in the presence of non-parametric dyna mic uncertainty, Automatica,vol. 26, pp. 113-124, 1990 .
20. Younce, R.C. and Rohrs, C.E. Identification with non-parametric uncertainty, inProc.IEEE Control Decision Co nj ,pp. 3154-3161, 1990.
21. Smith, R.S. and Doyle, J.C. Model invalidation-a connection between robust controland identification, inProc. Arner: Control Co nt ,pp. 1435-1440, 1989.
22. Smith , R.S. and Doyle, J.C. Model validation: A connection between robust control andidentification, IEEE Trans. Auto. Control,vol. 37, pp. 942-952, July 19 92.
23. Smith , R.S. Model validation for robust control: an experimental process control appli-cation,'' Automatica,vol. 3 1, pp. 1637-1647, Nov. 1 995.
24. Poolla, K., Khargonekar, P.P., Tikku, A., Krause, J., and Nagpal, K. A time-domainapproach to mo del validation, IEEE Trans. Auto. Control,vol. 39, no. 5 , pp. 951-959,1994.
25. Zhou, T and Kimura,H. Time d omain identification for robu st control,Syst. and ControlLetters,vol. 20, pp. 167-178, 1993 .
26. Smith , R. and Dullerud, G. Validation of continuous-time control models by finite exper-imental data, IEEE Trans. Auto. Control,Aug. 1996, to appear.
27. Rangan, S. and Poolla,K., Time-domain sampled-data model validation, inProc. Amer.Control Con ,pp. 140-1 144, 1995 .
28. Dullerud, G. and Smith, R.S. Experimental application of time domain model validation:Algorithms and analysis, Int. I obust Nonlinear Control,1996. to appear.
29. Doyle, J. Structured uncertainty in control system design, inProc. IEEE Control Decision
Con , pp. 260-265, 1985 .30. Khar gonek ar, P.P. and Rotea, M.A. Mixed H21H, Control: A convex optimizationapproach, IEEE Trans. Auto. Control,vol. 36, no. 7, pp. 824-837, 1991.
31. Scherer,C.W. Multiobjective H21H, control, IEEE Trans. Auto. Contro l,vol. 40, no. 6,pp. 1054-1062, 1 995.
32. Smith , R.S. Model validation and parameter identification for systems inH , and I,,'' inProc. Amer: Control Confi,pp. 2852-2856, 1992 .
33. Newlin, M. and Smith, R.S. A generalization of the structured singular value and itsapplication to model validation, IEEE Trans. Auto. Control,1994. accepted forpublication.
34. Boyd, S.P., El Ghaoui,L., Feron, E. and Balakrishnan,V. Linear Matrix Inequalities inSystem and Control Theory.Philadelphia: SIAM, 1994.
35. Nesterov, Y.E. and Nemirovskii, A.S. Interior-Point Polynomial Algorithms in ConvexProgramming.Philadelphia: SIAM, 1994.
36. Bamieh, B.A., Pearson, J.B. Jr., Francis, B.A., and Tannenbaum, A. A lifting techniquefor linear periodic systems with applications to sampled-data control,Syst. andControl Letters,vol. 8, 1991.
37. Dullerud, G. and Smith, R.S. A continuous time extension condition, IEEE Trans . Auto.Control,vol. 41, no. 5, pp. 738-742, 1996.
38. Van den Hof, P.M.J., Heuberger, P.S., and Bokor, J. System identification withge neralizedorthonormal basis functions, Autornatica,vol. 3 1, pp. 1821-1 834, Dec. 1995 .