Model of Generator Saturation for Use in Power System Studies
5
8/13/2019 Model of Generator Saturation for Use in Power System Studies http://slidepdf.com/reader/full/model-of-generator-saturation-for-use-in-power-system-studies 1/5 Model of generator saturation for use in power - system studies G Shackshaft, B.Eng., Ph.D., Mem. I.E.E.E., C.Eng., F.I.E.E., and P.B. Henser, M.Sc, Ph.D., D.I.C., A.C.G.I., C.Eng.. M.I.E.E. Indexing terms: Electric generators, Electric reactance, Magnetisation, Power systems Abstract The representation of magnetic saturation of generators in power system studies is re-examined in the light of new test data obtained on 5 MW and 660 MW units. A new saturation model, of adequate simplicity for use in multi- machine studies, is formulated and checked for accuracy. The parameters for use in the model are obtained firstly from no-load measurements but later in the paper it is shown that the parameters can be obtained from on-load measurements. The primary incentive for the work was to devise a method for the accurate calculation of generator rotor angle when operating at leading power factors. In the event, the model is shown to produce accurate calculation of both rotor angle and excitation requirements over the whole of the normal operating range. List of symbols Xdo,Xqo = unsaturated synchronous reactances (i.e. airgap-line values) Xd,Xq = saturated synchronous reactances Xado, X a qo = unsaturated mutual reactances Xad Xaq — saturated mutual reactances X a = armature leakage reactance Xsai — X d0 ~X qo = saliency reactance Xi = saturated mutual reactance of intermediate axis 0 = angle between airgap voltage and direct axis (degrees) 5 = rotor angle, degrees V ag — airgap-line voltage Id . Iq = stator currents Suffixes d and q indicate direct- and quadrature-axis parameters, respectively. Unless otherwise stated, all parameters are in per-unit. 1 Introduction Accurate calculation of iron-saturation effects in synchronous machines has been the objective of many workers during the last decade. The methods employed have been based on the use of digital computers and have been categorised as finite-difference, 1 finite- element 2 and discrete-reluctance 3 methods. All have examined the problem from the machine designer's point of view, and have been primarily concerned with the accuracy of calculation of excitation requirements, and, hence, very complex models have been solved; in general, computation time has been of secondary importance. In the same period, power-system analysts have come to under- stand the importance of machine saturation in large-scale system studies and have been seeking suitable analytical methods. Here, the main concern is to devise a simple model which is very efficient in computing time, bearing in mind that a power system involving many machines is likely to be studied, and yet to have a model which is sufficiently accurate for the purposes for which it is being used. The main problem has recently been identified as that of calculating or measuring the saturation characteristic of the quadrature axis to enable an accurate calculation of generator rotor-angle to be made. The importance of quadrature-axis saturation was generally recognised as a result of an international exercise organised by CIGRE 4 which was based on system fault tests carried out by the CEGB on an underexcited 120 MW generator at Northfleet Power Station. 5 The exercise was primarily concerned with comparing the accuracy of calculation of mechanical and electromagnetic transients, but an important byproduct was that it revealed errors in the calculation of the starting rotor-angle of the test generator. This led to a further CIGRfi investigation 6 which sought to collect test evidence on the saturation characteristics of generators, particularly of the quadrature axis, and on the models used to represent it in computer programs. On the basis of the test evidence submitted, it was concluded that, for large modern machines, the saturation characteristics of the direct and quadrature axes are quite different, and that the errors in the calcu- per 8368P first received 1st December 1978 and in revised form 17th April 1979 Dr. Shackshaft and Dr. Henser are with the System Technical Branch Planning Department Central Electricity Generating Board 15 Newgate Street London EC1A 7A U England PROC. IEE, Vol. 126, No. 8, AUGUST 1979 lation of the initial rotor-angle in the Northfleet exercise were due to inadequate representation of saturation in the quadrature axis. It was also concluded that none of the saturation models in use could adequately represent all the observed effects, and that further test evidence, involving both no-load and on-load results on a generator, was required. The CEGB has since carried out a number of such measurements on large generators (two 500 MW and one 660 MW units), and these have enabled a new saturation model to be formulated and validated; the purpose of this paper is to report this work. 2 The representation of saturation 2.1 Mathematical model The saturation characteristics of the direct and quadrature axes are represented by the following two equations (Fig. 1 refers): 0) 2) = l+ m d (V*W) = l+m Q Hence, given the airgap voltage in the axis under consideration, the mutual reactances in the direct and quadrature axes are given by X ad s = X aqs = 3) 4) excitation current, p.u Fig 1 Normalised saturation characteristics a Airgap line b Direct axis c Quadrature axis 759 0020-3270/79/080759 05 $01-50/0
-
Upload
yourou1000 -
Category
Documents
-
view
216 -
download
0
Transcript of Model of Generator Saturation for Use in Power System Studies

8/13/2019 Model of Generator Saturation for Use in Power System Studies
http://slidepdf.com/reader/full/model-of-generator-saturation-for-use-in-power-system-studies 1/5
Model of generator saturation for use in power -system studiesG Shackshaft, B.Eng., Ph.D., Mem. I.E.E.E., C.Eng., F.I.E.E., and P.B. Henser, M.Sc, Ph.D., D.I.C., A.C.G.I., C.Eng.. M.I.E.E.
Indexing terms: Electric generators, Electric reactance, Magnetisation, Power systems
Abstract
The representation of magnetic saturation of generators in power system studies is re-examined in the light of newtest data obtained on 5 MW and 660 MW units. A new saturation m odel, of adequate simplicity for use in multi-machine studies, is formulated and checked for accuracy. The parameters for use in the model are obtained firstlyfrom no-load measurements but later in the paper it is shown that the parameters can be obtained from on-loadmeasurements. The primary incentive for the work was to devise a method for the accurate calculation of generatorrotor angle when operating at leading power factors. In the event, the model is shown to produce accuratecalculation of both rotor angle and excitation requirements over the whole of the normal operating range.
List of symbols
Xdo,Xqo = unsaturated synchronous reactances (i.e. airgap-linevalues)
Xd,Xq = saturated synchronous reactancesXado, Xaqo = unsaturated mutual reactancesXad Xaq — saturated mutual reactances
Xa = armature leakage reactance
Xsai — Xd0 ~Xqo = saliency reactanceXi = saturated mutual reactance of intermediate axis
0 = angle between airgap voltage and direct axis (degrees)5 = rotor angle, degrees
Vag — airgap-line voltageId . Iq
= stator currents
Suffixes d and q indicate direct- and quadrature-axis parameters,respectively. Unless otherwise stated, all parameters are in per-un it.
1 Introduction
Accurate calculation of iron-saturation effects in synchrono usmachines has been the objective of many workers during the lastdecade. The methods employed have been based on the use of digitalcompu ters and have been categorised as finite-diff erence ,
1 finite-
element2 and discrete-reluctance3 meth ods. All have examined theproblem from the machine designer's point of view, and have beenprimarily concerned with the accuracy of calculation of excitationrequirements, and, hence, very complex models have been solved; ingeneral, computation time has been of secondary importance.
In the same period, power-system analysts have come to under-stand the importance of machine saturation in large-scale systemstudies and have been seeking suitable analytical methods. Here, themain concern is to devise a simple model which is very efficient incomputing time, bearing in mind that a power system involving manymachines is likely to be studied, and yet to have a model which issufficiently accurate for th e purposes for which it is being used. Themain problem has recently been identified as that of calculating ormeasuring the saturation characteristic of the quadrature axis toenable an accurate calculation of generator rotor-angle to be made.
The importance of quadrature-axis saturation was generallyrecognised as a result of an international exercise organised by CIGRE4
which was based on system fault tests carried out by the CEGB on anunderexcited 120 MW generator at Northfleet Power Station .
5 The
exercise was primarily concerned with comparing the accuracy ofcalculation of mechanical and electromagnetic transients, but animportant byproduct was that it revealed errors in the calculation ofthe starting rotor-angle of the test generator. This led to a furtherCIGRfi investigation
6 which sought to collect test evidence on the
saturation characteristics of generators, particularly of the quadratureaxis, and on the models used to represent it in computer programs. Onthe basis of the test evidence submitted, it was concluded that, forlarge modern machines, the saturation characteristics of the direct andquadrature axes are quite different, and that the errors in the calcu-
per 8368P first received 1st December 1978 and in revised form 17th April1979
Dr. Shackshaft and Dr. Henser are with the System Technical Branch PlanningDepartment Central Electricity Generating Board 15 Newgate Street LondonEC1A 7A U England
PROC. IEE, Vol. 126, No. 8, AUGUST 1979
lation of the initial rotor-angle in the Northfleet exercise were due toinadequate representation of saturation in the quadrature axis. It wasalso concluded that none of the saturation models in use couldadequately represent all the observed effects, and that further testevidence, involving both no-load and on-load results on a generator,was required.
The CEGB has since carried out a number of such measurementson large generators (two 500 MW and one 660 MW units), and thesehave enabled a new saturation model to be formulated and validated;the purpose of this paper is to report this work.
2 The representation of saturation
2.1 Mathematical model
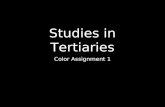
The saturation characteristics of the direct and quadratureaxes are represented by the following two equations (Fig. 1 refers):
0)
2 )
= l+ md
(V*W) = l+mQ
Hence, given the airgap voltage in the axis under consideration, themutual reactances in the direct and quadrature axes are given by
Xads =
Xaqs =
3 )
4 )
excitation current, p.u
Fig 1
Normalised saturation characteristics
a Airgap lineb Direct axisc Quadrature axis
759
0020-3270/79/080759 05 $01-50/0

8/13/2019 Model of Generator Saturation for Use in Power System Studies
http://slidepdf.com/reader/full/model-of-generator-saturation-for-use-in-power-system-studies 2/5
The above representation of saturation characteristics is not new. It isbeing used in many computer programs for power-system analysis, but
this particular representation is not an important aspect of the modeldescribed herein.
The first assumption used in the model, which is based on experi-mental observation, is that there is a sinusiodal variation of permeancein the airgap between the direct and quadrature axes. Hence, the
mutual reactance in any intermediate axis Xt), for a given airgapvoltage is defined by
Xi = Xads cos 0 + Xaqs sin 6 5)
The second assumptipn used in the model, which is also based on
experimental observation, is
that the
difference between the
saturatedvalues of the direct- and quadrature-axis mutual reactances is constant(X sa{), and that these reactances are sinusiodally distributed about the
intermediate mutual reactance Xt) according to the following two
equations:
Jinrl — i • ^sril Si n 0
XaQ = .
• + Xggi sin 6 p)
+ Xulco s26 7)
The saturated values of the corresponding synchronous reactances are
given by
y - y + X 9)Aq —
Aaq
Aa ̂
The mutual reactance variations associated with the above assumptions
are portrayed in Fig. 2.
30 60 90
9,degrees
Fig. 2
Diagrammatic portrayal of assumed variations of mutual reactances
2.2 Reasons fo r choice of model
The test information, which led to the choice of the modeldescribed above, was obtained somewhat by accident, since it camefrom tests which were not intended to explore saturation character-istics. The tests, w hich are known as either stator-decrement or flux-decay tests and are used to obtain transient parameters, were carriedout with the initial airgap voltage in various positions between the
direct and quadrature axes; each test was carried out from rated statorvoltage (hence approximately constant airgap voltage) with the fieldwinding on open circuit, and it is the initial conditions for the testthat provide the key information. Such tests were carried out on onlyone (generator C) of the three generators to be discussed herein.
From the measured initial values of active and reactive powers,stator voltage and current and rotor angle, and using the equationsgiven in Appendix 9, values were calculated for the mutual reactanceof the axis in which the airgap was positioned Xt) and also for the
mutual reactances in the direct Xad) and quadrature Xaq) axes.These calculated values are shown in Fig. 3, and whereas the curves,drawn using the assumption stated above, do not give a perfect fit,
the agreement is sufficient to justify investigation of the assumptions.
Two points need be made at this stage regarding the assumptionsand the fitted test points shown in Fig. 3:
(i) The sinusoidal variation of the reactance Xt) is entirely consist-ent with Park's original formulation of the 2-axis model.
7 Park
ignored saturation in postulating sinusoidal variations, but the p roposedmodel includes saturation and postulates sinusoidal variations for
constant airgap voltage.
(ii) The assumption that there is a constant difference betweendirect- and quadrature-axis synchronous reactances (i.e. regardless of
load, saturation, etc.) has no sound theoretical basis, and it must be
judged on the overall effectiveness of the model.
2.3 Data for the model
The essential data are the saturation characteristics of bothdirect and quadrature axes.The characteristic of the direct axis presents no problem as this is
always measured in the works prior to dispatch to the site. H owever,owing to repairs, many generator stators are not now associated withthe rotors with which they were works-tested, and so new open-circuit characteristics were measured on site for each of the threegenerators discussed herein. Additionally, measurements were made of
the saturation characteristic using the alternative method, in whichthe generator is excited from the power system with its rotor angleheld at zero and with no field excitation; the stator voltage is variedusing the generator transformer taps. Good agreement was obtained
30 60 90
6.degrees
Fig. 3
Measured mutual reactances and fitted curves
x Interdediate axiso Direct axis0 Quadrature axis
760 PROC. IEE, Vol. 126, No. 8, AUGUST 1979

8/13/2019 Model of Generator Saturation for Use in Power System Studies
http://slidepdf.com/reader/full/model-of-generator-saturation-for-use-in-power-system-studies 3/5
Table 1PARAMETERS FOR SATURATION MODEL
Parameter
Rated MWPower factor
md
Data source
DesignDesignTestCalculationCalculationTestTestTestTest
GeneratorA
66 00-852-0551-810-18500857 00-428 0
GeneratorB
50 00-852-772-470-170 1 67-00-378 0
GeneratorC
50 00-852-712-500-2000957 00-398-0
Table 2
MEAN ERRORS IN
LATIONS
Number of testsMean rotor-angleerror, degreesMean field-currenterror,
ROTOR ANGLE
Generator
A
450-22
1-26
AND F IELD C UR R ENT C ALC U-
Generator
B
351 1 9
1 1 2
Generator
C
490-26
- 1 0 9
1-0r
09
a.d, 08o>o
0-5 -
0-2 03 0 4 0-5
quad rature-a xis current, p.u
0-6
Fig. 4Measured points on saturation characteristic of quadrature axis andfitted curve
n f l0 5
b
-10 -5 15
_n-10 10 15
-5 -10 -5
active iopower,p
-0-5
lead
0 5 10
reac tive power, p.u. lag
Fig. 5Performance chart of generator show ing typical range of test points(Generator A)
• Normal operating boundaryTest point
between the results obtained from the two methods for all threegenerators , and, thus, some test justification w as obtained for the
calculated values of the armature leakage reactance (Xa).
The saturation characteristic of the quadrature axis presents rather
more of a problem. It has to be measured on site with the generator
excited from the power system , as described above for the direct axis,
PROC. 1EE, Vol. 126, No. 8, AUGUST 1979
Fig. 6Histograms of rotor-angle and field-current errors
a, b an d c Rotor-angle er rors for gen erators A, B and C, respectively
d, e and / Field-current errors for g enerators A , B and C, respectively
but with the rotor angle held at 90°. The problem lies in extrapolating
the m easured results, the range of which is limited by the gene ratortransformer taps, to cover the full range of operating flux levels. The
points in Fig. 4 show a typical range of test results, and it can be seen
that the voltage can neither be reduced sufficiently to allow a check
to be ma de o n th e calculated po sition of the airgap-line, nor be raised
sufficiently to cover the full operating range of flux levels (Vag equal
to abo ut 1-1 p.u . is required for th is, and up to 1-0 p.u . if the
imp orta nt leading power-factor range is to be adequa tely covered ).
This problem is discussed further in Section 5.
3 Testing the mode l
The procedure used to check the validity of the model was to
construct it , as described above, using the results of open-circuit and
no-load tests to obtain parameters, and then to use the model tocalculate conditions with the generator on load and compare these
with test results.
The model parameters for the three generators discussed herein are
given in Table 1. It is to be noted that only two of the parameters are
obtained from design calculations.
76 1

8/13/2019 Model of Generator Saturation for Use in Power System Studies
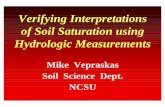
http://slidepdf.com/reader/full/model-of-generator-saturation-for-use-in-power-system-studies 4/5
The range of a typical set of on-load tests is shown in Fig. 5.Generally speaking, the measurem ents ranged from 25 —100 of therated load, with the reactive power loading ranging between the ratedreactive load and that corresponding to a measured rotor angle of 90°.For each test point, the model was supplied with the measured valuesof terminal voltage and active and reactive powers, and it used theseto calculate values for rotor angle and field current. These calculatedvalues were then compared with the measured values and the errorsused to assess the accuracy of the model. The errors are defined bythe following equations:
Rotor-angle error (degrees) = calculated value — measured value
(calculated value —
measured value) x 100Field-current error ( ) =measured value
The errors are plotted in histogram form in Fig. 6, and the meanerrors are given in Table 2. The histograms show the number of resultsobtained in a given error band (1° for ro tor angle and 1 for fieldcurrent); each small square on the histograms represents a test result.
It can be seen that in all cases the errors are reasonably distributedabout near zero mean error and thus the scatter of the points can beattributed to test measurement errors.
As stated earlier, the primary concern is to provide a model whichgives a good calculation of rotor angle, particularly at leading powerfactors, having regard to the fact that in existing models the errortends to increase as operation is changed from lag to lead. To checkon this, the errors were plotted against reactive power and an exampleis shown in Fig. 7. There is a slight, but not really significant, change
in th e mean ro tor angle between lagging and leading oper ation; similarresults were obtained for the other two generators.
4 Comparison with other models
To demonstrate the improved accuracy of the proposedmodel, the rotor-angle errors for various models are shown in histo-gram form in Fig. 8. The results used in this comparison are from allthe on-load leading-power-factor tests conducted on Generator A.
rotor -ang leerror,
degrees
-4L.
15field -current
error.
• °1 0
5
• i • • i • •
-5
-
• • •
* *
- 0 6 -0 4 -0-2 0 02 0 4 06lead reactive power, p u lag
Fig. 7Rotor-angle and field-current errors as affected by reactive powerloading Generator A)
762
Table 3
PARAMETERS AND MEAN ROTOR-ANGLE AND FIELD-CURRENTERRORS OBTAINED USING ON-LOAD METHOD (RESULTS FROM NO-LOAD METHOD A RE GIVEN IN BRACKETS)
^ q 0
mq
Q
Mean rotor-angle error, degrees
(All tests)Mean rotor-angle error, degrees
(Leading p.f. tests)Mean field-current error,
(All tests)Mean field-current error,
(Lagging p.f. tests)
GeneratorA
1-8
(1-81)0-46
(0-42)9-5
( 8 0 )0 1 5
0-220-25
(0-24)1-50
(1-26)0-18
-016
GeneratorB
2-41(2-47)0-38
(0-37)9-4
( 8 0 )0-46
1 1 90-56
(1-38)0-81
(112)-0 -45
-0-39)
GeneratorC
2-55(2-50)0-49
(0-39)6-7
(8-0)0 0 1
0-260 1 5
(0-74)0 1 3
-109)
- 1 1 3 -1-70)
Fig. 8a shows the errors using the proposed mode l, with a meanrotor-angle error of —0-7°. Fig. 8b shows the errors for the model,frequently used by the CEGB and by o thers , in which the direct-axissaturation characteristic is used to saturate both direct and quadratureaxes in an equal manner;
8 the mean error is +5-1°. Fig. 8c is for the
model in which the direct-axis saturation characteristic is used tosaturate the direct axis alone; the mean error is +7-4°. Fig. 8d is for
the model used in Fig. 86, except that the measured quadrature axissaturation characteristic is used to saturate both axes; the mean erroris —2-3°. An infrequently used mode l, which is not shown in Fig. 8, inwhich both saturation and synchronous saliency are ignored (XQ =Xd = constant), gives a mean error of +1 3-9 °.
5 An alternative approach
Having reached this stage in the work, at which it wasconsidered that the model had been satisfactorily validated, we canpose the question as to what could be done if neither no-load testinformation nor calculated parameters are available on the quadrature-axis saturation characteristic: alternatively stated, can a model of thequadrature axis be constructed using on-load test information alone?The lack of no-load information can arise from one of two reasons:
(i) Some supply authorities are reluctant or unable to carry out theno-load tests because of problems of turbine heating caused byno-load running.
(ii) Some autho rities d o n ot fit tap changers to generator trans-formers and thus an adequate range of test results cannot be obtained.
The following routine has been devised in an attempt to answer theabove question using the proposed model. It is assumed that thesaturation characteristic of the direct axis is known.
(i) For each on-load test, calculate Vag and 8 from measured data.(ii) For each test, calculate values for Xd and XQ using the
equations given in Appendix 9 (excluding those points near to 0° and90° rotor angle because of inaccuracy in the calculation) and thencalculate the mean value of the difference between Xd and Xq toobtain Xsat.
-10 -5 10 -5 10 15 20
H n ,-5 10 15 -10 - 5
Fig. 8Histograms of rotor-angle errors for various saturation models (Gen-erator A)
a Model presented hereinb Direct-axis characteristic saturating both direct and quadrature axesc Direct-axis characteristic saturating direct axis aloned Quadrature-axis characteristic saturating both direct and quadrature axes
PROC. IEE, Vol, 126, No. 8, AUGU ST 1979

8/13/2019 Model of Generator Saturation for Use in Power System Studies
http://slidepdf.com/reader/full/model-of-generator-saturation-for-use-in-power-system-studies 5/5
(iii) For each test, calculate Xad = Xd — Xa) and Xaq = Xq — Xa)
and, using eqns. 6 and 7, calculate a value for Xt.
(iv) For each test, calculate a value for Xads (using the direct-axissaturation characteristic) and use this in eqn. 5 to calculate Xaqs.
(v) Using the above calculate values for Vag and Xaqs for each test,together with Xaq0 = -^ado ~ Xsai), carry out a least-square-error fitonto eqn. 4 to obtain values for mQ and nq.
The above routine could have been applied to all the on-load testpoints for each generator to obtain a best fit for all points. How ever,it was decided to use only those points at nominal full load and thusto simulate the way in which model parameters might be obtainedin the future. (There are 9, 8 and 12 test points at nominal full load
for Generators A,B and C, respectively). The model data thus o btainedwere checked by using it, as described in Section 3, to calculate rotorangle and field current for all the on-load tests. The results obtainedusing the above routine the on-load method) are summarised in
Table 3, which also contains, in brackets, the corresponding resultsobtained using the no-load method.
The first three items in Table 3 define the quadrature-axis saturationcharacteristic and the last four items indicate the accuracy w ith whichrotor angles and field currents are calculated. Comparison of the
no-load and on-load methods reveals differences between the satu-ration characteristics but no significant differences between the meanerrors in rotor angle and field current; the standard deviations of theerrors for the two methods are very similar. The conclusion to be
drawn from this would appear to be that a highly accurate deter-mination of the quadrature-axis saturation characteristic is not
essential using the proposed model.Overall, it has been demonstrated that a satisfactory model can be
obtained from on-load measu rements. The measurements can be madeat the normal operating load of the unit and should cover as large arange of reactive power loading as possible. •
6 Conclusions
The model proposed herein is superior in all respects to any
other known model of comparable simplicity, and it is recommendedfor use in power-system s tudies.
The examples used to demonstrate its effectiveness have beenbased on measured data. However, to enable the model to be used instudies of new machine designs, calculated data will be required. Thisraises the question as to whether or not the saturation curve for the
quadrature axis can be predicted accurately at the design stage. Binns9
has shown that modern methods can do this for the direct axis, andthere is reason to assume that the same could be done for the
quadrature axis.Both no-load and on-load m ethods have been used herein to obtain
the saturation characteristic of the quadrature axis. Both methodshave produced good results and neither has been demonstrated to be
superior to the other. However, the on-load method is recommendedfor the following reasons:
(i) It involves minimum disruption to the normal operation of a
generator when measurements are made.(ii) The range of airgap voltage over which measurements can be
made are those prevailing during normal operation. 0-9 to 1-1 p.u.
for on-load method compared with 0-75 to 0-95 for no-load metho d).(iii) All the quadrature-axis parameters are obtained, and, in
particular, a design calculation of the unsaturated synchronous
reactance is not needed.
The model has been applied to turbogenerators alone because no
adequate test results are available for hydrogenerators. However, thereis evidence
6 that the direct- and quadrature-axis saturation character-
istics of hydrogenerators are quite different, and thus the model couldalso find application for such machines.
7 Acknowledgments
The test results used in this paper are mainly due to the
efforts of M.D. Barber and A.T. Poray, who organised the generatortests on which this w ork is based.
The authors are grateful to the Central Electricity GeneratingBoard for permission to publish this paper.
8 References
1 FUCHS, E.F., and ERDELYI, E.A.: 'Non-linear theory of turbo-alternators.,IEEE Trans., 1972, PAS-91 pp. 583-599
2 CHAR1, M.V.K., and SILVESTER, P.: 'Analysis of turbo-alternator magneticfields by finite elements', ibid., 1977, PAS-90, pp. 454-464
3 BINNS, K.J., and SMITH, J.R.: 'Prediction of load characteristics of turbo-generators', Proc. IEE, 1978,125, (3), pp. 197-202
4 CHORLTON, A., and SHACKSHAFT, G.: 'Comparison of accuracy ofmethods for studying stability. Northfleet exercise', Electra 1972 23 ,pp . 9-49
5 SHACKSHAFT, G., and NEILSON, R.: 'Results of stability tests on an
underexcited 120 MW generator', Proc. IEE, 1972, 119, (2), pp. 1 75-1886 SHACKSHAFT, G.: 'Generator parameters for stability studies', CIGRE,1967, Paper 32-15
7 PARK, R.H.: 'Two-reaction theory of synchronous machines; generalisedmethod of analysis — Part V,AIEE Trans., 1929,48, pp. 716-730
8 SHACKSHAFT, G.: 'General-purpose turbo-alternator model', Proc IEE1963,110, (4), pp. 703 -713
9 BINNS, K.J.: 'Prediction of the no-load magnetisation characteristics of largeturbogenerators', ibid., 1965,112, (4), pp. 720-730
9 Appendix
Calculation o 2 axis reactances
The following per-unit equations are used to calculate thesynchronous reactances in the direct and quadrature axes from themeasured test quantities:
Xd = iVq + IqRa IfdXa)l Ifd-Id)Xq = Vd+IdRa)/Jq
In which
Vd = Vt sin 5
Vq = Vt cos 5
Id = / , sin 5 + 0)
Iq = It COS 5 + 0)
0 = tan1 Qt/P t)
(10)
(11)
(12)
(13)
(14)
05
(16)
Vt, It, Pt and Qt are the measured stator voltage, stator current,stator active and reactive powers, respectively; Ifd is the measured
field current and 5 is the measured rotor angle.
PROC. IEE, Vol. 126, No. 8, AUGUST 1979 763