MODEL 111.2. PROSIDING NASIONAL (Makalah … · formulir 1 model 111.2. prosiding nasional (makalah...
3
FORMULIR 1 MODEL 111.2. PROSIDING NASIONAL (Makalah Dipresentasikan) FORMULIR VALIDASI DAN REKAPITULASI NILAI KARYA ILMIAH DOSEN INSTITUT PERTANIAN BOGOR A. Identitas Dosen Pengusul 1. Nama/NIP 2. Departemen/ Fakultas : Agus Buono : IImu Komputer FMIPA-IPB B. Identitas Makalah dan Prosiding 1. Judul Makalah : Implementation of Inverse Kinematics for the Coordination Control of Six Legged Robot 2. Penulis : Wulandari, Karlisa Priandana, Agus Buono ••.1 3. Halaman dalam Prosiding : 213-218 4. Identitas Prosiding a. Judul Prosiding : Proceeding International Seminar On Sciences 2013 b. ISBN : 978-979-95093-9-0 d. Penerbit : Faculty Of Mathematics And Natural Scieces, Bogar Agricultural University c. Tahun Terbit :2013 e. Alamat Website Penerbit : http://fmipa.ipb.ac.id c. Hasil Validasi Oleh Ketua Departemen Dengan ini menyatakan dengan sebenarnya bahwa karya ilmiah ini telah diperiksa/divalidasi dan hasilnya telah memenuhi kaidah ilmiah, norma akademik dan norma hukum sesuai dengan Peraturan Menteri Pendidikan Nasional Nomor 17 Tahun 2010 tentang Pencegahan dan Penanggulangan Plagiat di Perguruan Tinggi. Bogar, ~ - f)- ~\Lf a.n Ketua Departemen IImu Komputer Sekretaris, ( Ahmad Ridha, Sam, MS ) NIP. 19800507 05011001 D. Rekapitulasi Nilai 1. Nilai Reviewer 1 2. Nilai Reviewer 2 :~ :~ 3. Nilai Akhir (Rata-rata Nilai Reviewer 1 dan Reviewer 2) :~ 4. Nilai untuk individu dosen ~ yang bersangkutan (..~ %) : ~ Bogar, 3 ~~.~~ ~.1~ . NIP. 195712201983121001 -------_./
Transcript of MODEL 111.2. PROSIDING NASIONAL (Makalah … · formulir 1 model 111.2. prosiding nasional (makalah...
FORMULIR 1
MODEL 1112 PROSIDING NASIONAL (Makalah Dipresentasikan)
FORMULIR VALIDASI DAN REKAPITULASINILAI KARYA ILMIAH DOSEN INSTITUT PERTANIAN BOGOR
A Identitas Dosen Pengusul
1 NamaNIP2 Departemen Fakultas
Agus Buono IImu Komputer FMIPA-IPB
B Identitas Makalah dan Prosiding
1 Judul Makalah Implementation of Inverse Kinematics for the Coordination Control ofSix Legged Robot
2 Penulis Wulandari Karlisa Priandana Agus Buonobullbull1 3 Halaman dalam Prosiding 213-218
4 Identitas Prosiding
a Judul Prosiding Proceeding International Seminar On Sciences 2013
b ISBN 978-979-95093-9-0 d Penerbit Faculty Of MathematicsAnd Natural Scieces Bogar Agricultural University
c Tahun Terbit 2013 e Alamat WebsitePenerbit httpfmipaipbacid
c Hasil Validasi Oleh Ketua Departemen
Dengan ini menyatakan dengan sebenarnya bahwa karya ilmiah ini telah diperiksadivalidasi danhasilnya telah memenuhi kaidah ilmiah norma akademik dan norma hukum sesuai dengan PeraturanMenteri Pendidikan Nasional Nomor 17 Tahun 2010 tentang Pencegahan dan PenanggulanganPlagiat di Perguruan Tinggi
Bogar ~ - f) - ~Lfan Ketua Departemen IImu KomputerSekretaris
( Ahmad Ridha Sam MS )NIP 19800507 05011001
D Rekapitulasi Nilai
1 Nilai Reviewer 1
2 Nilai Reviewer 2
~
~
3 Nilai Akhir (Rata-rata NilaiReviewer 1 dan Reviewer 2) ~
4 Nilai untuk individu dosen ~yang bersangkutan (~ ) ~
Bogar 3 ~~~~ ~1~
NIP 195712201983121001
-------_
FORMULIR 2
MODEL 1112 PROSIDING NASIONAL (Makalah Dipresentasikan)
FORMULIR PENILAIAN KARYA ILMIAH DOSENINSTITUT PERTANIAN BOGOR
(REVIEWER 1)
A Identitas Makalah dan Prosiding
1 Judul Makalah Implementation of Inverse Kinematics for the Coordination Control ofSix Legged Robot
2 Penulis Wulandari Karlisa Priandana Agus Buono3 Halaman dalam Prosiding 213-2184 Identitas Prosiding
a Judul Prosiding
b ISBN
Proceeding International Seminar On Sciences 2013
978-979-95093-9-0 d Penerbit Faculty Of MathematicsAnd Natural Scieces Bogor Agricultural University
c Tahun Terbit 2013 e Alamat WebsitePenerbit httpfmipaipbacid
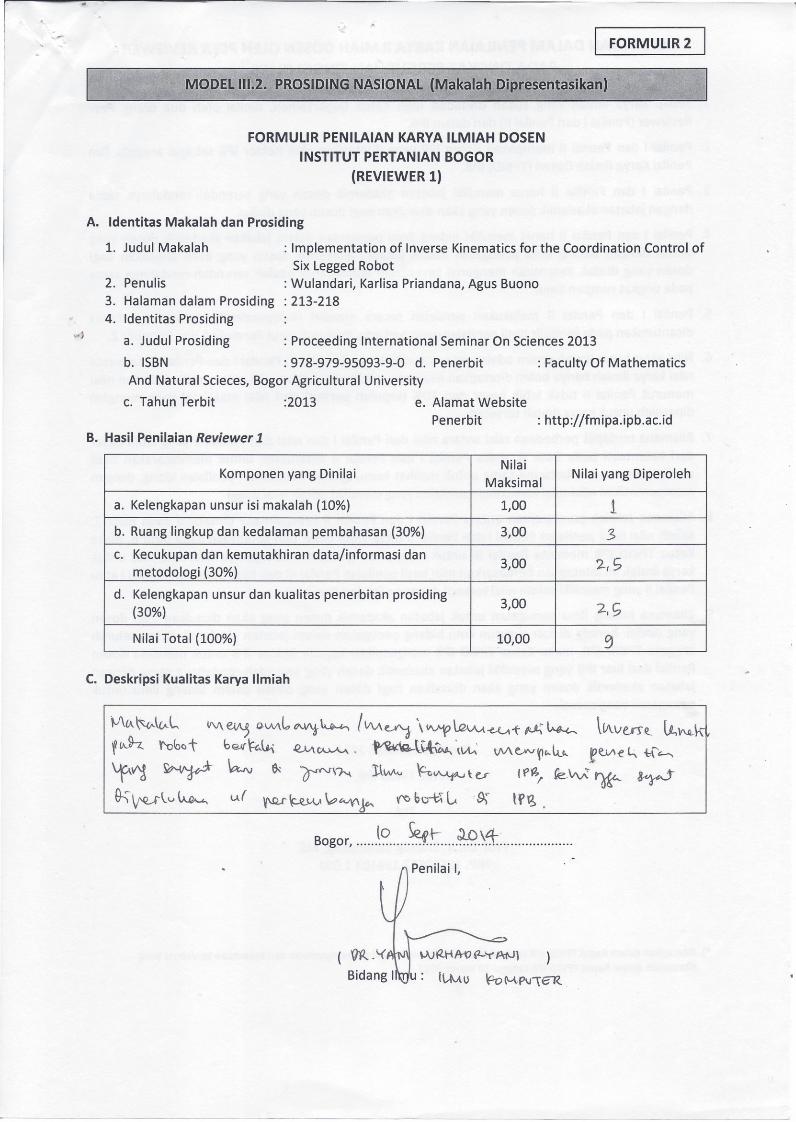
B Hasll Penilaian Reviewer 1
Komponen yang DinilaiNilai
Nilai yang DiperolehMaksimal
a Kelengkapan unsur isi makalah (10) 100 1b Ruang lingkup dan kedalaman pembahasan (30) 300 3c Kecukupan dan kemutakhiran datainformasi dan
300 ~(Smetodologi (30)
d Kelengkapan unsur dan kualitas penerbitan prosiding 300
(30) 2~
Nilai Total (100) 1000 ~
C Deskripsi Kualitas Karya IImiah
tJ~~vl VV~ OW~~~ IVIA~ ~~-laquoA-t ~~ Aven-~ (N-~ft9-z Yobot bGlt1[R~ ~cuA- ~~N u VVevv~rLu f~e ~ -b~
t~ ~ ~ 6- ~M JNv yen-c~lu (~~I fe~ ~ ~
amp--tV~v~ u( VVUWv~WVJc-- VO bo-tH9- lr~
(o ~t- ~4Bogor
W ~I-M r-tAtU
u iWI) ~ MPJe-R
FORMULIR 3
MODEL 1112 PROSIDING NASIONAL (Makalah Dipresentasikan)
FORMULIR PENILAIAN KARYA ILMIAH DOSENINSTITUT PERTANIAN BOGOR
(REVIEWER 2)
A Identitas Makalah dan Prosiding
Implementation of Inverse Kinematics for the Coordination Control ofSix Legged Robot
2 Penulis Wulandari Karlisa Priandana Agus Buono
3 Halaman dalam Prosiding 213-218
1 Judul Makalah
4 Identitas Prosiding
a Judul Prosiding
b ISBN
Proceeding International Seminar On Sciences 2013
978-979-95093-9-0 d Penerbit Faculty Of MathematicsAnd Natural Scieces Bogor Agricultural University
c Tahun Terbit 2013 e Alamat WebsitePenerbit httpfmipaipbacid
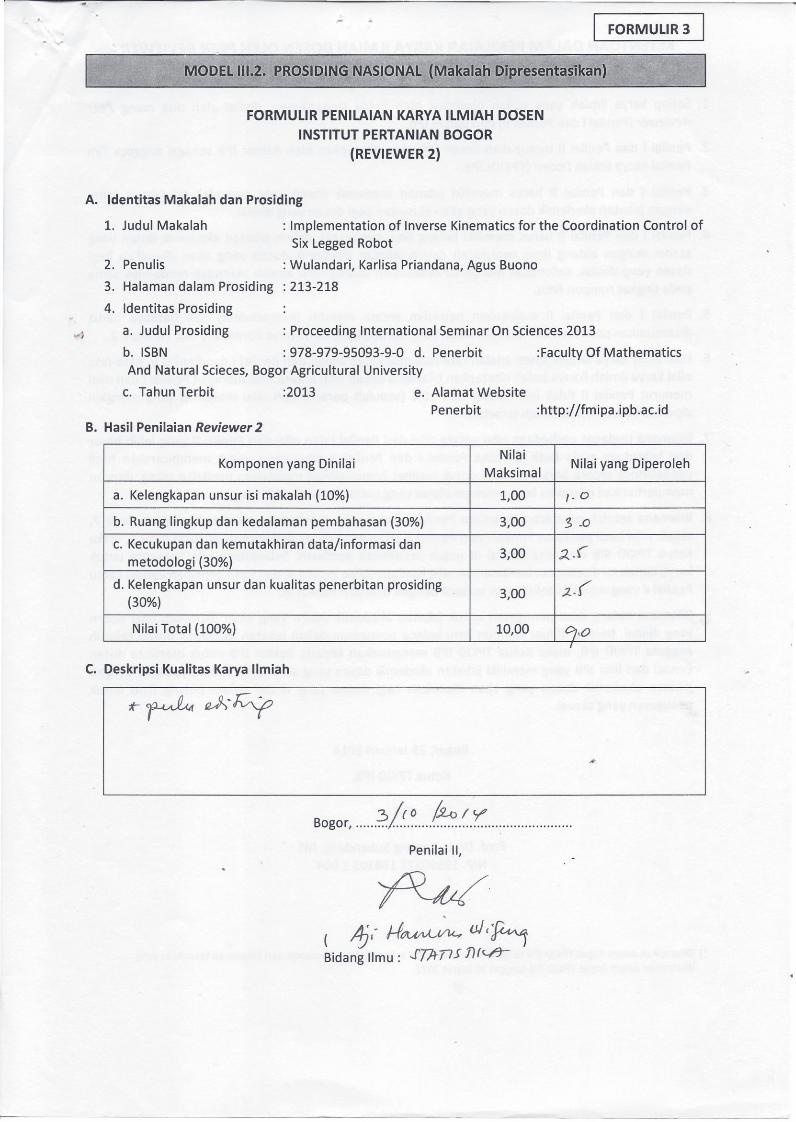
B Hasll Penilaian Reviewer 2
Komponen yang DinilaiNilai
Nilai yang DiperolehMaksimal
a Kelengkapan unsur isi makalah (10) 100 0
b Ruang lingkup dan kedalaman pembahasan (30) 300 3 _0
c Kecukupan dan kemutakhiran datainformasi dan300 2s
metodologi (30)
d Kelengkapan unsur dan kualitas penerbitan prosiding300 2(
(30)
Nilai Total (100) 1000 00I
c Deskripsi Kualitas Karya IImiah
Bogor ~~~ fy Penilai II
~
( Ajt- HfMVUk- u (~Bidang IImu JTJ+77SlIfc3-
FORMULIR 2
MODEL 1112 PROSIDING NASIONAL (Makalah Dipresentasikan)
FORMULIR PENILAIAN KARYA ILMIAH DOSENINSTITUT PERTANIAN BOGOR
(REVIEWER 1)
A Identitas Makalah dan Prosiding
1 Judul Makalah Implementation of Inverse Kinematics for the Coordination Control ofSix Legged Robot
2 Penulis Wulandari Karlisa Priandana Agus Buono3 Halaman dalam Prosiding 213-2184 Identitas Prosiding
a Judul Prosiding
b ISBN
Proceeding International Seminar On Sciences 2013
978-979-95093-9-0 d Penerbit Faculty Of MathematicsAnd Natural Scieces Bogor Agricultural University
c Tahun Terbit 2013 e Alamat WebsitePenerbit httpfmipaipbacid
B Hasll Penilaian Reviewer 1
Komponen yang DinilaiNilai
Nilai yang DiperolehMaksimal
a Kelengkapan unsur isi makalah (10) 100 1b Ruang lingkup dan kedalaman pembahasan (30) 300 3c Kecukupan dan kemutakhiran datainformasi dan
300 ~(Smetodologi (30)
d Kelengkapan unsur dan kualitas penerbitan prosiding 300
(30) 2~
Nilai Total (100) 1000 ~
C Deskripsi Kualitas Karya IImiah
tJ~~vl VV~ OW~~~ IVIA~ ~~-laquoA-t ~~ Aven-~ (N-~ft9-z Yobot bGlt1[R~ ~cuA- ~~N u VVevv~rLu f~e ~ -b~
t~ ~ ~ 6- ~M JNv yen-c~lu (~~I fe~ ~ ~
amp--tV~v~ u( VVUWv~WVJc-- VO bo-tH9- lr~
(o ~t- ~4Bogor
W ~I-M r-tAtU
u iWI) ~ MPJe-R
FORMULIR 3
MODEL 1112 PROSIDING NASIONAL (Makalah Dipresentasikan)
FORMULIR PENILAIAN KARYA ILMIAH DOSENINSTITUT PERTANIAN BOGOR
(REVIEWER 2)
A Identitas Makalah dan Prosiding
Implementation of Inverse Kinematics for the Coordination Control ofSix Legged Robot
2 Penulis Wulandari Karlisa Priandana Agus Buono
3 Halaman dalam Prosiding 213-218
1 Judul Makalah
4 Identitas Prosiding
a Judul Prosiding
b ISBN
Proceeding International Seminar On Sciences 2013
978-979-95093-9-0 d Penerbit Faculty Of MathematicsAnd Natural Scieces Bogor Agricultural University
c Tahun Terbit 2013 e Alamat WebsitePenerbit httpfmipaipbacid
B Hasll Penilaian Reviewer 2
Komponen yang DinilaiNilai
Nilai yang DiperolehMaksimal
a Kelengkapan unsur isi makalah (10) 100 0
b Ruang lingkup dan kedalaman pembahasan (30) 300 3 _0
c Kecukupan dan kemutakhiran datainformasi dan300 2s
metodologi (30)
d Kelengkapan unsur dan kualitas penerbitan prosiding300 2(
(30)
Nilai Total (100) 1000 00I
c Deskripsi Kualitas Karya IImiah
Bogor ~~~ fy Penilai II
~
( Ajt- HfMVUk- u (~Bidang IImu JTJ+77SlIfc3-
FORMULIR 3
MODEL 1112 PROSIDING NASIONAL (Makalah Dipresentasikan)
FORMULIR PENILAIAN KARYA ILMIAH DOSENINSTITUT PERTANIAN BOGOR
(REVIEWER 2)
A Identitas Makalah dan Prosiding
Implementation of Inverse Kinematics for the Coordination Control ofSix Legged Robot
2 Penulis Wulandari Karlisa Priandana Agus Buono
3 Halaman dalam Prosiding 213-218
1 Judul Makalah
4 Identitas Prosiding
a Judul Prosiding
b ISBN
Proceeding International Seminar On Sciences 2013
978-979-95093-9-0 d Penerbit Faculty Of MathematicsAnd Natural Scieces Bogor Agricultural University
c Tahun Terbit 2013 e Alamat WebsitePenerbit httpfmipaipbacid
B Hasll Penilaian Reviewer 2
Komponen yang DinilaiNilai
Nilai yang DiperolehMaksimal
a Kelengkapan unsur isi makalah (10) 100 0
b Ruang lingkup dan kedalaman pembahasan (30) 300 3 _0
c Kecukupan dan kemutakhiran datainformasi dan300 2s
metodologi (30)
d Kelengkapan unsur dan kualitas penerbitan prosiding300 2(
(30)
Nilai Total (100) 1000 00I
c Deskripsi Kualitas Karya IImiah
Bogor ~~~ fy Penilai II
~
( Ajt- HfMVUk- u (~Bidang IImu JTJ+77SlIfc3-