mmt_jan2012.pdf
14
Stiffness matrix calculation of rolling element bearings using a nite element/contact mechanics model Yi Guo a,1 , Robert G. Parker a,b, a Mechanical Engineering Department, The Ohio State University, Columbus, Ohio, United States b University of Michigan-Shanghai Jiao Tong University Joint Institute, Shanghai Jiao Tong University, Shanghai, China article info abstract Article history: Received 1 December 2010 Received in revised form 13 December 2011 Accepted 16 December 2011 Available online xxxx Current theoretical bearing models differ in their stiffness estimates because of different model assumptions. In this study, a finite element/contact mechanics model is developed for rolling element bearings with the focus of obtaining accurate bearing stiffness for a wide range of bearing types and parameters. A combined surface integral and finite element method is used to solve for the contact mechanics between the rolling elements and races. This model captures the time-dependent characteristics of the bearing contact due to the orbital motion of the rolling elements. A numerical method is developed to determine the full bearing stiff- ness matrix corresponding to two radial, one axial, and two angular coordinates; the rotation about the shaft axis is free by design. This proposed stiffness determination method is validat- ed against experiments in the literature and compared to existing analytical models and wide- ly used advanced computational methods. The fully-populated stiffness matrix demonstrates the coupling between bearing radial, axial, and tilting bearing deflections. © 2011 Elsevier Ltd. All rights reserved. Keywords: Rolling element Bearing Stiffness Finite element Contact 1. Introduction Accurate stiffness estimation of rolling element bearings is essential to analyze the static and dynamic deformation of rotating mechanical systems. Bearing stiffness is crucial in the vibration of machinery. This work originated as part of a study of gear noise propagation from the dynamic excitation at the gears to the noise radiated by the housing, but the need for accurate bearing stiff- ness is evident in most rotating system applications. Early studies on rolling element bearings were performed by Harris [1], Jones [2], Palmgren [3], and Brandlein et al. [4]. They investigated the nonlinear relation between bearing deflection and applied load. Gargiulo [5] gives empirical formulae for the load-stiffness and deflection-stiffness relations by assuming rigid bearing races. Those formulae apply for radial and axial stiff- nesses for a few bearing types. The above theoretical studies are limited to a few types of bearings. Furthermore, they cannot determine tilting and cross-coupling stiffnesses between the radial, axial, and tilting deflections of bearings. Several of these stud- ies lack validation. Lim and Singh [6] proposed a theoretical model to estimate diagonal and cross-coupling terms in the stiffness matrix. They used a discrete summation over all loaded rolling elements to obtain total bearing forces and moments instead of the integral form used in Harris's [1] model. Bourdon et al. [7] developed an alternative method to estimate the stiffness matrix by dividing the rolling element surface and raceways into slices and computing individual contact stresses. Liew and Lim [8] extended the prior study to include the time-varying stiffness caused by orbital motion of the rolling elements. Mechanism and Machine Theory 51 (2012) 32–45 Corresponding author at: State Key Lab for Mechanical Systems and Vibration, University of Michigan - Shanghai Jiao Tong University Joint Institute, 800 Dongchuan Road, Shanghai 200240, China. Tel.: +1 614 688 3922; fax: +1 614 292 3163. E-mail address: [email protected] (R.G. Parker). 1 Currently at National Renewable Energy Laboratory. 0094-114X/$ – see front matter © 2011 Elsevier Ltd. All rights reserved. doi:10.1016/j.mechmachtheory.2011.12.006 Contents lists available at SciVerse ScienceDirect Mechanism and Machine Theory journal homepage: www.elsevier.com/locate/mechmt
-
Upload
yanuar-krisnahadi -
Category
Documents
-
view
5 -
download
1
Transcript of mmt_jan2012.pdf

Stiffness matrix calculation of rolling element bearings using a !niteelement/contact mechanics model
Yi Guo a,1, Robert G. Parker a,b,!a Mechanical Engineering Department, The Ohio State University, Columbus, Ohio, United Statesb University of Michigan-Shanghai Jiao Tong University Joint Institute, Shanghai Jiao Tong University, Shanghai, China
a r t i c l e i n f o a b s t r a c t
Article history:Received 1 December 2010Received in revised form 13 December 2011Accepted 16 December 2011Available online xxxx
Current theoretical bearing models differ in their stiffness estimates because of different modelassumptions. In this study, a finite element/contact mechanics model is developed for rollingelement bearings with the focus of obtaining accurate bearing stiffness for a wide range ofbearing types and parameters. A combined surface integral and finite element method isused to solve for the contact mechanics between the rolling elements and races. This modelcaptures the time-dependent characteristics of the bearing contact due to the orbital motionof the rolling elements. A numerical method is developed to determine the full bearing stiff-ness matrix corresponding to two radial, one axial, and two angular coordinates; the rotationabout the shaft axis is free by design. This proposed stiffness determination method is validat-ed against experiments in the literature and compared to existing analytical models and wide-ly used advanced computational methods. The fully-populated stiffness matrix demonstratesthe coupling between bearing radial, axial, and tilting bearing deflections.
© 2011 Elsevier Ltd. All rights reserved.
Keywords:Rolling elementBearingStiffnessFinite elementContact
1. Introduction
Accurate stiffness estimation of rolling element bearings is essential to analyze the static and dynamic deformation of rotatingmechanical systems. Bearing stiffness is crucial in the vibration of machinery. This work originated as part of a study of gear noisepropagation from the dynamic excitation at the gears to the noise radiated by the housing, but the need for accurate bearing stiff-ness is evident in most rotating system applications.
Early studies on rolling element bearings were performed by Harris [1], Jones [2], Palmgren [3], and Brandlein et al. [4]. Theyinvestigated the nonlinear relation between bearing deflection and applied load. Gargiulo [5] gives empirical formulae for theload-stiffness and deflection-stiffness relations by assuming rigid bearing races. Those formulae apply for radial and axial stiff-nesses for a few bearing types. The above theoretical studies are limited to a few types of bearings. Furthermore, they cannotdetermine tilting and cross-coupling stiffnesses between the radial, axial, and tilting deflections of bearings. Several of these stud-ies lack validation.
Lim and Singh [6] proposed a theoretical model to estimate diagonal and cross-coupling terms in the stiffness matrix. Theyused a discrete summation over all loaded rolling elements to obtain total bearing forces and moments instead of the integralform used in Harris's [1] model. Bourdon et al. [7] developed an alternative method to estimate the stiffness matrix by dividingthe rolling element surface and raceways into slices and computing individual contact stresses. Liew and Lim [8] extended theprior study to include the time-varying stiffness caused by orbital motion of the rolling elements.
Mechanism and Machine Theory 51 (2012) 32–45
! Corresponding author at: State Key Lab for Mechanical Systems and Vibration, University of Michigan - Shanghai Jiao Tong University Joint Institute, 800Dongchuan Road, Shanghai 200240, China. Tel.: +1 614 688 3922; fax: +1 614 292 3163.
E-mail address: [email protected] (R.G. Parker).1 Currently at National Renewable Energy Laboratory.
0094-114X/$ – see front matter © 2011 Elsevier Ltd. All rights reserved.doi:10.1016/j.mechmachtheory.2011.12.006
Contents lists available at SciVerse ScienceDirect
Mechanism and Machine Theory
j ourna l homepage: www.e lsev ie r .com/ locate /mechmt

These theoretical models of rolling element bearings make different assumptions about the contact between the rollingelements and races, leading to the dramatic discrepancy in their stiffness estimations discussed later in this paper. Furthermore,theoretical models have not included some bearing details known to significantly affect bearing stiffness, such as, internal radialand axial clearances, roller and race crownings, race width and thickness, diameter of the inner raceway, and bore of the outerraceway. Theoretical models of rolling element bearings, therefore, provide stiffness estimates with limited accuracy and manylimitations on when they can be realistically applied.
Kraus et al. [9] measured radial and axial stiffnesses and damping of a radial ball bearing with varying axial preload by per-forming experimental modal tests on a transmission test stand. They concluded that static bearing stiffnesses sufficiently repre-sented rolling element bearings by showing little difference of measured stiffnesses when the bearing was stationary andspinning. Royston and Basdogan [10] measured radial and axial stiffnesses of a self-aligning ball bearing with combined radialand axial preloads. Walford and Stone [11] developed a test rig to measure the radial stiffness of a pair of angular contact ballbearings under oscillating conditions. Parametric studies were further conducted to identify the effects of lubricant temperature,rotor speed, and applied load on this bearing pair.
Recently, techniques to experimentally determine bearing dynamic coefficients were developed through vibratory responsemeasurements of rotor-bearing systems. Tiwari et al. [12,13] used identification techniques to estimate certain dynamic bearingstiffnesses from unbalance and impulse response measurements of rotor-bearing test rigs. Goodwin [14] reviewed the experi-mental approaches to identify bearing stiffness and damping.
The proposed stiffness determination method in this study is applicable for any rolling element bearing. Some of the experi-ments cited above serve as the benchmark for the stiffness determination method proposed in this work.
The objectives of this study are to:
1. Establish a finite element/contact mechanics model of rolling element bearings in [15] and investigate the contact character-istics between the rolling elements and races;
2. Propose a numerical method to compute the fully-populated stiffness matrix of rolling element bearings based on quasi-staticfinite element/contact mechanics analysis;
3. Validate the proposed stiffness determination method by comparing results against published experiments [9,10];4. Investigate the importance of cross-coupling terms in the stiffness matrix.
2. Modeling assumptions
Rotation speed has limited effect on the stiffness of rolling element bearings for moderate speeds. In one experiment, mea-surements show only slight difference in bearing stiffness throughout the entire tested speed range with a maximum deviationof 6.89% from the static stiffness [9].
The rolling element bearings under investigation are assumed to operate at moderate speeds, and thus the centrifugal andgyroscopic effects on the rolling elements due to high rotation speeds are ignored.
Themajor friction forces in rolling element bearings include sliding and rolling friction. The sliding friction force is negligible for rollingelement bearings [3]. The rolling friction force is dominant only for heavily loaded systemswhere plastic deformation occurs in the con-tact area [16]. The loads applied to the bearings are assumed to be moderate, so friction and related tribology effects are not considered.
While lubrication, including elastohydrodynamic lubrication (EHL), can significantly affect bearing damping, it has mild effecton bearing stiffness. Brandlein found that EHL prevails at high speed rolling conditions [4] or with heavy bearing loads [16]. Con-sequently, the influence of lubrication on the bearing stiffness is expected to not be significant considering the moderate rollingspeed and thin fluid film (about 0.1 micrometer, 0.002% of bearing outer diameter).
Bearing cages are assumed to maintain a constant angular position of each rolling element relative to each other.
3. Finite element/contact mechanics bearing model
The finite element/contact mechanics models of rolling element bearings (Fig. 1) include important design details such asaccurate roller and race crownings, internal radial and axial clearances, contact angle, roller length, bearing width, length and
Fig. 1. Cut-away finite element mesh of a radial ball bearing (dimensions detailed in Table 1) and a double-row cylindrical bearing (from a helicopter application).
33Y. Guo, R.G. Parker / Mechanism and Machine Theory 51 (2012) 32–45

diameter of raceway for ball bearings, and so on. These parameters affect bearing stiffnesses significantly. They are, however, notincluded in many theoretical bearing models [1-4].
In addition, the finite element/contact mechanics model applies to most bearing types, including cylindrical, tapered, andspherical roller bearings, radial and angular contact ball bearings, thrust bearings, and needle bearings.
The contact solution is a critical feature. This approach uses a combined surface integral and finite element method detailedin [17-19], which is implemented in [15]. Summaries of its key features for gear tooth contact mechanics, which also apply tobearing mechanics, are given in [20,21].
The surface integral method analyzes the rolling element near-field contact mechanics by integrating, in the style of a Green'sfunction, the solution for a point load on a half space over the contact area. This assumption normally requires the size of the con-tact area to be orders of magnitude smaller than the contacting bodies. The rolling element contact considered in this study doesnot satisfy this condition because the sizes of the contact areas are not sufficiently small compared to the bearing dimensions. Thisassumption is, however, not needed to accurately predict relative displacements of points in the near-field contact area.
Finite element analysis reliably predicts far-field elastic deformations starting a small distance away from the contact area.Matching of the surface integral and finite element solutions at the matching surface (Fig. 2) yields a combined contact solutionfor near-field surface deformations and far-field rolling element and race deformations due to the rolling element contact.
The displacement dr;c at point r inside the contact area due to a load applied at a three-dimensional grid point c on the contactsurface
dr;c! dSr;c"dS
r;m
n o! dFE
r;m "1#
where pointm (Fig. 2) is located on the matching surface ! that defines the boundary between the near- and far-field regions. Therelative displacement dS
r;c"dSr;m in the near-field is calculated by the surface integral method based on the Bousinesq half-space
solution; it is not significantly affected by the body deformation outside of the near-field. The last term dFEr;m is obtained by con-
ventional finite element analysis; it depends on full system elastic deformation and is not significantly affected by the near-field contact deformations. dr;c is obtained by minimizing the spatial discretization error according to [17]
#!
dr;c" dSr;c"dS
r;m
! ""dFE
r;m
h i2!0 "2#
Essential contact parameters control the shape and size, and hence the accuracy, of the contact pressure at all contacting sur-faces. These parameters include the separation tolerance ("), number (N) and width (#) of contact patches in the rolling elementprofile direction (that is, the direction in the plane of the bearing), and number of contact patches (M) in the axial direction. "controls the size of the area where potential contact is searched in the deformed state. The size of the searched area increaseswith ". Correct selection of these contact parameters is crucial to balance computational efficiency against solution efficiency.
Calculated contact pressures in the contact zones between each rolling element and bearing race are used to check the correct-ness of the contact parameters. The shape of the contact pressure is expected to be parabolic in the profile direction. The shape ofthe contact pressure in the axial direction depends on the loading conditions. For instance, if a cylindrical bearing has tiltingmotion, the contact pressure in the axial direction is similar to a triangle. With radially applied load, a nearly rectangular contactpressure is expected in the axial direction. Examples of correct contact pressure of a radially loaded cylinder of a cylindrical bear-ing with full crowning and ball of a radial ball bearing are demonstrated in Fig. 3. A thorough parametric study is necessary todetermine proper choices of contact parameters.
The contact solver searches for the contact at every time step as the bearing rotates, which makes this approach capable ofsolving the time-dependent rolling element contact.
This finite element/contact analysis approach [17-19] has been validated against gear experiments and analysis [20-22]. Thebearing contact force variation due to internal clearances calculated by this method has been correlated with analytical modelnumerical integration in [23].
Body 1 Body 2
Matching Interface
m
r
cContact Grid
!
Contact Surfaces
Fig. 2. Pair of contacting elastic bodies with matching interfaces (––).
34 Y. Guo, R.G. Parker / Mechanism and Machine Theory 51 (2012) 32–45

4. Numerical method of bearing stiffness estimation
Traditional models of rolling element bearings include only radial and axial stiffnesses. These models do not provide the tiltingstiffness, which is important when helical gears, shaft bending, or other effects related to relative tilting are present. For someexample transmission systems, out-of-plane housing vibrations closely connected to tilting deformation at the bearings are dom-inant in experiments [24,25]. To explain such motions, off-diagonal cross-coupling terms in the stiffness matrix must be includedin the bearing model. Fully-populated stiffness matrices are necessary to properly address the vibration transmissibility throughrolling element bearings under the above and other similar circumstances.
The stiffness matrix of rolling element bearings, where x and y denote axes in the plane of the bearing and z is the axialdirection, is
K $
kxx kxy kxz kx$x kx$y 0kyx kyy kyz ky$x ky$y 0kzx kzy kzz kz$x kz$y 0k$xx k$xy k$xz k$x$x k$x$y 0k$yx k$yy k$yz k$y$x k$y$y 00 0 0 0 0 0
2
66666664
3
77777775
"3#
Fig. 3. Contact pressure distributed over the contact zones of a (a) cylinder of a cylindrical roller bearing, and (b) ball of a radial ball bearing when radial loads areapplied.
35Y. Guo, R.G. Parker / Mechanism and Machine Theory 51 (2012) 32–45

$x, $y are the out-of-plane angular deflections about the x and y axes, respectively. Diagonal terms in the stiffness matrix includeradial stiffnesses kii, axial stiffness kzz, and tilting stiffnesses k$i$i, where i=x, y. The off-diagonal cross-coupling terms fall into fourcategories: coupling between radial and axial deflections kiz, kzi, i=x, y; coupling between radial and out-of-plane angulardeflections ki$j, k$ji, i, j=x, y; coupling between axial and out-of-plane angular deflections kz$i, k$iz, i=x, y; and other couplingterms kij, k$i$j i$ j=x, y. The sixth row and column are zeros because of the free rotation along the shaft axis.
Without any prior assumption about the load-deflection relation, the relative bearing deflection q $ x; y; z; $x; $y# $
betweenthe inner and outer races with the applied forces and moments F $ Fx; Fy; Fz;M$x ;M$y
# $is obtained computationally through
finite element and contact analyses in this study. Contact between the rolling elements and races is nonlinear. The bearing stiff-ness is thus defined as K $ %F
%q (instead of Fq) and calculated for given steady loading vector F0, giving
K $
%Fx%x
%Fx%y
%Fx%z
%Fx%$x
%Fx%$y
0
%Fy%x
%Fy%y
%Fy%z
%Fy%$x
%Fy%$y
0
%Fz%x
%Fz%y
%Fz%z
%Fz%$x
%Fz%$y
0
%M$x%x
%M$x%y
%M$x%z
%M$x%$x
%M$x%$y
0
%M$y
%x%M$y
%y%M$y
%z%M$y
%$x%M$y
%$y0
0 0 0 0 0 0
2
66666666666666666664
3
77777777777777777775
"4#
The stiffness matrix is symmetric because the bearing system is conservative. The symmetry of the stiffness matrix is usedlater as one check to validate the proposed stiffness determination method.
The stiffness matrix %F%q is calculated numerically through finite differences to first, second, fourth, and sixth order, respectively,
by
F q0 ! #q" #"F q0" ##q
"5#
F q0 ! #q" #"F q0"#q" #2#q
"6#
8F q0 !#q2
! ""8F q0" #q
2
! ""F q0 ! #q" # ! F q0"#q" #
6#q"7#
256F q0 !#q4
! ""256F q0" #q
4
! ""40F q0 !
#q2
! "! 40q q0" #q
2
! "! F q0 ! #q" #"F q0"#q" #
90#q"8#
where q0 is the calculated bearing deflection vector at given load F0 about which the stiffness matrix is desired and #q $#qx; #qy; #qz; #q$x ; #q$y
n ois the specified small disturbance vector at q0. The calculated reaction bearing force vector is denoted
by F. The computational effort is concentrated in these calculations of F. Each finite difference formula requires a number of Fevaluations equal to its accuracy order except the first order difference formula, which requires two evaluations of F. Conse-quently, the total number of F evaluations is 25 times the formula accuracy order, or 25 times two for first order finite difference.Using the above formulae, each diagonal and cross-coupling stiffness element in the fully-populated stiffness matrix is deter-mined. For example, the cross-coupling stiffnesses determined below are based on the second order difference formula
kxy!Fx q0 ! #qyey! "
"Fx q0"#qyey! "h i
2#qy
k$xz!Mx q0 ! #qzez" #"Mx q0"#qzez" #% &
2#qz
"9#
where ey; ez are the unit vectors along the y, z directions.The accuracy of the determined stiffnesses relies on the accuracy of the selected finite difference formula and the finite element/
contact mechanics analysis. If the finite element/contact analysis has low order accuracy, use of high order finite difference to cal-culate the bearing stiffness does not improve the result accuracy although it requires more F evaluations. The chosen finite differ-ence order should have the same accuracy order as the finite element/contact mechanics analysis.
36 Y. Guo, R.G. Parker / Mechanism and Machine Theory 51 (2012) 32–45

To obtain the accuracy order of the finite element analysis, we examine the discretization error eh=Vh"V, where h denotes theaverage element size and V, Vh denotemeasures of the exact and finite element solutions, respectively. Vh is approximated as
Vh $ V ! c1hp1 ! c2h
p2 !… "10#
where c1hp1 represents the principle truncation error of Vh and the exponents p1, p2 denote the orders of accuracy. c1, c2 denotethe coefficients of the corresponding accuracy orders, which are independent of h. Because V is unknown, the accuracy order isstudied by evaluating eh with different meshes when h1>h2>h3&. By ignoring the higher order truncation errors of Vh1
, Vh2,
Vh3, the following equation is derived
eh3"eh2eh2"eh1
$Vh3"Vh2Vh2"Vh1
!hp12 "hp13hp11 "hp12
"11#
Consequently, the leading order of accuracy is [26-28]
p1 $log
Vh3"Vh1
Vh3"Vh2
% &logh2h3logh1h3
( )
log h1h2
! " "12#
Table 1Radial ball bearing A parameters (based on SKF EEB3-2Z bearing).
Parameters Values (mm, degree)
Number of rows 1Number of rolling elements 7Contact angle 0Pitch diameter 15.75Bore diameter 9.525Ball diameter 3.969Bearing width 7.144Outer diameter 22.23Outer diameter of inner raceway 13.06Inner diameter of outer raceway 18.21Radial clearance 0, 10.00!10"3
Inner race crown curvature 0.520Outer race crown curvature 0.520
10-8 10-6 10-4 10-2 10010-2
10-1
100
"q/q0
Asy
mm
etry
Fac
tor
Fig. 4. Asymmetry factor, the maximum of 2 kij"kjik kkij!kjik k ; i$j $ x; y; z; $x ; $y , of cylindrical bearing C for various #q
q0k k at q0 $ 10;26;0;"0:7;0:3" #%m. Bearing C isdescribed in Table 3.
37Y. Guo, R.G. Parker / Mechanism and Machine Theory 51 (2012) 32–45

By reducing h successively according to h2/h1=h3/h2=r, the above equation simplifies to
p1 $log
Vh3"Vh1
Vh3"Vh2
% &
log r" # "13#
This method yields the algorithm accuracy without knowing V.Following the above steps, two separate studies have been conducted to determine the order of solution accuracy: a) finite
element analyses of a disk deforming, and b) finite element/contact analyses of a four-roller rolling element bearing. Averageelement sizes are used here because the finite element meshes are not evenly-distributed in the actual disk and bearing models.By reducing the element size in steps by factors of two, p1 converges to 1.11 when h3!0.983mm and the disk outer diameter andthickness are 27.0mm and 10.0mm, respectively. Similarly, finite element/contact analysis is performed on the rolling elementbearing while the average element size is halved at each iteration. In this case, p1=1.94 when h3!0.470mm and the outer diam-eter of the bearing is 52mm. Based on the above analyses, the results are estimated to have second order of accuracy. Therefore,the second-order finite difference formula is appropriate to determine K in this study.
It is crucial to use proper #q in the finite difference formula Eq. (8). Ideally, themagnitude of #q $ #qx; #qy; #qz; #q$x ; #q$y
! "is as
small as possible. If it is too small, however, round off error corrupts the approximation. The step size is selected based on #qq0k k $
!1
m!1 $ 5' 10"6 [29] when F is evaluated to full machine precision, where m is the formula order and ! is the unit roundoff(10"16). Numerical study has been performed to confirm this selection of #q for equal amplitudes in the x, y, z, $x, $y directions.
Fig. 4 demonstrates the effect of #q on the asymmetry factor, defined as the maximum of 2 kij"kjik kkij!kjik k ; i$j $ x; y; z; $x; $y of the bearing
stiffness matrix. The stiffness matrix should be symmetric because rolling element bearing systems are conservative. Using
50 100 150 200 250 300 350 4000
10
20
30
40
50
60
70
80
90
100
Axial load (N)
Rad
ial/a
xial
stif
fnes
s (k
N/m
m)
Radial stiffness
Axial stiffness
Fig. 5. Comparison between the proposed method with zero (···!···) and 0.01mm (–!–) radial clearances and Kraus et al.'s [9] experiment ("o") for radialand axial stiffnesses of radial ball bearing A under axial preloads. Dimensions of bearing A are described in Table 1.
Table 2Self-aligning ball bearing B parameters (based on SKF 1303EM bearing).
Parameters Values (mm, degree)
Number of rows 2Number of rolling elements 15Axial offset between rows 10.70Contact angle 12.70Angular position of the 1st rollers (1st row) 0Angular position of the 1st rollers (2nd row) 12.00Pitch diameter 35.24Bore diameter 17.00Ball diameter 7.131Bearing width 14.00Outer diameter 47.00Outer diameter of inner raceway 28.90Inner diameter of outer raceway 41.00Radial clearance 15.00!10"3
Inner race crown curvature factor 0.526
38 Y. Guo, R.G. Parker / Mechanism and Machine Theory 51 (2012) 32–45

improper#q, the calculated stiffnessmatrix becomes asymmetric. In Fig. 4, the asymmetry factor drops significantly from 40% to 2%when #q
q0k k is smaller than 3!10"5. Round off error comes into play when #qq0k k is smaller than 0.1!10"6. The optimal range of #q
q0k k tominimize numerical error is from 0.1!10"6 to 30!10"6, which includes the above theoretical estimate of 5!10"6. If higher so-lution accuracy is required, individual #qm;m $ x; y; z; $x; $y can be adjusted around the optimal #q determined above bypreforming similar step size analyses.
The above stiffness determination method gives stiffness estimates for many possible boundary conditions. For instance, thebearing races can be connected to the housing/shaft or fixed to ground. Thus, this method provides stiffness estimates whenthe bearings are parts of an overall system or are isolated.
5. Comparison against experimental data
To validate the proposed stiffness determinationmethod, radial and axial stiffnesses of bearings A and B have been compared againstpublished experiments [9,10] that give only diagonal bearing stiffnesses. Dimensions of these bearings are listed in Tables 1 and 2.
Radial and axial stiffnesses of radial ball bearing A calculated by the proposed method under axial preloads are comparedagainst experiments conducted by Kraus et al. [9] as shown in Fig. 5. The experimental data used in Fig. 5 are average values ofmeasured stiffnesses. The measurement was taken with shaft speed of 1000rpm. Because of the lack of information on internalradial clearance, two clearance values of 0 and 0.01mm are used to compute the computational results. These values are theextreme clearance design values under regular operating conditions as given in the SKF product information. Radial and axialstiffnesses determined by the proposed method match the experiments well.
Radial and axial stiffnesses of self-aligning ball bearing B calculated by the proposedmethod are compared against the Roystonand Basdogan experiment [10] under radial and axial preloads, respectively (Fig. 6). Good agreement is evident between the pro-posed method and the experiments for both radial and axial stiffness.
The slight differences between the computed and measured stiffnesses might be caused by different bearing boundary condi-tions. In the finite element bearing models, the outer surfaces of the bearing outer races are considered as ground, which is theideal operating condition. Bearings in the experiments have slightly different boundary conditions depending on the material
Table 3Single row cylindrical bearing C parameters (based on FAG N205E bearing).
Parameters Values (mm, degree)
Number of rows 1Number of rolling elements 13Contact angle 0Pitch diameter 39.00Bore diameter 25.00Roller length 8.600Roller diameter 7.500Bearing width 15.00Outer diameter 52.00Outer diameter of inner raceway 31.50Inner diameter of outer raceway 46.40Radial clearance 40.00!10"3
100 150 200 250 300 350 400 4500
10
20
30
40
50
60
70
80
90
100
Radial/axial load (N)
Rad
ial/a
xial
stif
fnes
s (k
N/m
m) Radial stiffness, zero axial load
Axial stiffness, zero radial load
Fig. 6. Comparison between the proposed method (···!···) and Royston and Basdogan [10] experiment ("o") for radial and axial stiffnesses of self-aligningball bearing B under radial and axial preloads, respectively. Dimensions of bearing B are described in Table 2.
39Y. Guo, R.G. Parker / Mechanism and Machine Theory 51 (2012) 32–45

of the housings, shafts, bearing spacers, and other connecting bodies. The elasticity of these connecting bodies affects the exper-imental bearing stiffness measurements.
6. Comparison against advanced modeling methods
Computational tools provide the most advanced bearing models. This section presents comparisons with computationalresearch and commercial tools as a benchmark and to highlight the differences that exist among state-of-the-art tools.
These advanced computational tools extend the published analytical models. COBRA [30,31] builds on the Lundberg–Palmgrentheory as originally developed by Jones [30,2,32]. REBM [6,8] uses Hertzian contact theory and other models developed by Harrisand Palmgren. REBM-NASA denotes the stiffness estimate computed by REBM included in [33]. Program X is the most widely usedsoftware we know to calculate bearing stiffness. Its analytical foundation is proprietary. We are not free to state its name becauseof license restrictions for academic use.
Diagonal stiffnesses of the cylindrical and radial ball bearings C and D (listed in Tables 3 and 4) calculated by these programsare compared against the current approach in Tables 5 and 6 when combined loads are applied. Stiffnesses calculated by ProgramX, REBM, REBM-NASA, and COBRA are presented as the deviations from the stiffness determined by the current approach. Thediscrepancy among these programs is apparent, showing the disagreement in state-of-the-art bearing models.
The bearing models in REBM-NASA are slightly different from the bearings in the other programs. The race crown curvaturefactor of bearing D (SKF Explorer 6205, Table 4 below) is 0.575 in REBM-NASA whereas it is 0.52 in the current approach andthe other programs. The roller diameter of bearing C (FAG N205E, Table 3 below) in REBM-NASA is 0.5% smaller than that inthe current approach and the other programs. Internal clearances used in [33] are not clearly specified. The large differencesbetween REBM and REBM-NASA are significant considering they use the same stiffness determination method with only slightdifferences in the bearing dimensions. This indicates that bearing/race micro-geometry strongly affects overall stiffness. Thus, amodel that captures these effects is essential for accurate bearing stiffness.
Comparisons to Gargiulo's [5] and Harris's [1] methods are not included in Tables 5 and 6 because they do not permit momentand combined force/moment loading. While Harris calculates contact pressure for misaligned rollers as occurs with moment load-ing, he underestimates the contact pressure [34]. In that case, the bearing stiffnesses, although not actually calculated by Harrisfor this case, will not be accurate.
7. Comparisons against published theoretical models
Theoretical bearing models [1-4] make different assumptions to derive the bearing load-deflection relation. These formula-tions are built starting from the predicted behavior of an individual rolling element contact. The load-deflection relation of a
Table 5Diagonal stiffnesses for the bearing C calculated by the current approach, Program X, REBM, REBM-NASA, and COBRA. The applied load vector isF=(323 N; 908 N;0;"825Nmm; 293Nmm).
kxx,N/mm kyy,N/mm kzz,N/mm k$x$x, N mm/rad k$y$y, N mm/rad
Current 113,149 200,320 0 1,843,453 1,550,232Program X "16.3% +66.0% 0 +20.0% "59.2%REBM "66.9% "12.9% 0 +0.20% "73.0%REBM-NASA "55.8% +24.3% 0 "17.5% "80.2%COBRA +10.2% +74.6% 0 +2.86% "57.1%
Table 4Radial (deep groove) ball bearing D parameters (based on SKF Explorer 6205 bearing).
Parameters Values (mm, degree)
Number of rows 1Number of rolling elements 9Contact angle 0Pitch diameter 38.50Bore diameter 25.00Ball diameter 7.900Bearing width 15.00Outer diameter 52.00Outer diameter of inner raceway 34.40Inner diameter of outer raceway 46.30Radial clearance 20.00!10"3
Inner race crown curvature 0.520Outer race crown curvature 0.520
40 Y. Guo, R.G. Parker / Mechanism and Machine Theory 51 (2012) 32–45

single rolling element is assumed as
Pe $ ke#le "14#
where Pe is the applied normal load on the rolling element and ke is the effective stiffness constant for the contact between therolling element and the bearing race. The exponent l describes the nonlinear load-deflection relation. ke and l are essential quan-tities to estimate the overall stiffness for theoretical bearing models. Theoretical models, however, use different ke and l based ontheir assumptions about the rolling element contact. Different assumptions on the bearing race elasticity are made to simplify thebearing stiffness formulations. For instance, Gargiulo [5] ignored the elasticity of the races so that the rolling element contact canbe considered as springs. By making this assumption, direct formulae relating bearing deflection and stiffness are obtained.Nevertheless, the elasticity of the races significantly affects bearing stiffnesses. Fig. 7 shows the nonlinear radial stiffness-loadrelation of the cylindrical and the radial ball bearings (labeled C and D, described in Tables 3 and 4) obtained by the Harris [1],Gargiulo [5], and While [35] theoretical models. Remarkable discrepancy is present among these models.
Many theoretical models, such as the Harris [1] and Jones [2] models, employ Hertzian contact theory to approximate the roll-ing element contact. Hertzian contact theory is valid when the extent of the contacting bodies is much larger than the dimensionof the contact area. This contact area must be sufficiently far from the other boundaries of the bodies so that the contacting bodiescan be considered as elastic half-spaces. These conditions are not satisfied by the rolling elementcontact. Thus, theoretical modelsbased on the Hertzian contact theory apply for bearings with unrealistically thick and wide races. Experiments on bearing stiff-ness [36] exhibit significant deviation between measured and calculated stiffness using Hertzian contact theory, showing thatHertzian models are suitable for qualitative but not quantitative predictions of bearing stiffness. In addition, stiffnesses deter-mined by the various Hertzian models have large differences as shown in Fig. 7.
Different from Hertzian contact theory, the combined surface integral and finite element approach used in this study does notrequire assumptions about bearing dimensions or unrealistic race thickness and width. This is because the near-field contact so-lution mates with a far field finite element solution that accurately captures realistic geometry. The near-field contact solutionwith precise geometry definition allows for accurate micro-geometry of the rolling elements and races. This approach providesa more accurate stiffness estimate than Hertzian contact theory.
The Harris [1], Jones [2], and Gargiulo [5] models of rolling element bearings are now compared against the proposed methodfor bearings C, D, and E (listed in Tables 3, 4, and 7). Fig. 8 shows radial stiffnesses of cylindrical bearing C and radial ball bearing Destimated by the proposed method and Harris model at a variety of applied radial loads. Radial stiffness from the finite element/
0 2 4 6 8 10Radial load (kN)
Bearing C
Bearing D
600
500
400
300
200
100
0
Rad
ial b
earin
g st
iffne
ss (
kN/m
m)
Fig. 7. Radial stiffness of cylindrical bearing C and radial ball bearing D vs. applied radial loads calculated by the Harris (") [1], Gargiulo ('"'") [5], and While("") [35] models. The While [35]model is modified to use &F
&q to calculate the stiffness instead of Fq. Bearings C and D are described in Tables 3 and 4.
Table 6Diagonal stiffnesses for the bearing D calculated by the current approach, Program X, REBM, REBM-NASA, and COBRA. The applied load vector is F = (317 N;894 N; 0;"9.7Nmm; 3.6Nmm).
kxx,N/mm kyy,N/mm kzz,N/mm k$x$x, N mm/rad k$y$y, N mm/rad
Current 49,582 95,013 3,955 940,694 506,869Program X "14.5% +0.40% "17.1% "4.40% "33.7%REBM +1.40% +18.5% "19.6 "1.10% "51.0%REBM-NASA +1.04% "29.8% "75.8% "74.7% "77.1%COBRA "22.7% +4.30% "17.8% "3.37% "36.2%
41Y. Guo, R.G. Parker / Mechanism and Machine Theory 51 (2012) 32–45

contact mechanics models is calculated two ways. One way uses the design bearing dimensions (circles), which are nearly iden-tical to commercial products; and the other uses unrealistic dimensions with much thicker/wider races chosen to match assump-tions of Hertzian contact theory (semi-infinite space). With the unrealistic dimensions, excellent agreement is evident betweenthe proposed method and Harris model, especially for bearing D. This serves as one validation of the proposed method. It alsoshows the limitation of Harris’ method: bearing stiffnesses with the designed bearing dimensions are up to 38% lower thanthose with the unrealistic dimensions chosen to mimic Harris's assumptions.
Also based on Hertzian contact theory, Jones [2] proposed a theoretical model to study bearing deflection and axial load forangular contact ball bearings. Harris [1] extended this model to determine radial and axial stiffnesses of angular contact ball bear-ings, noted as the Jones-Harris model. Fig. 9 compares axial stiffnesses of angular contact ball bearing E (described in Table 7) withcontact angles of 20 and 35 deg calculated by the proposed method, Jones–Harris model, and Gargiulo [5] model. To compareagainst these theoretical models, the finite element/contact mechanics solution is given for design dimensions and with unreal-istically enlarged bearing width (240% of the design value) chosen to match the theoretical model assumptions under axial pre-loads. With the unrealistic dimensions, results of the proposed method match the Jones-Harris model well, while axial stiffnesscalculated by Gargiulo's model deviates dramatically from the other models. Again, this helps validate the computationalmodel by comparing with published results. The results also highlight the limitations of the Jones-Harris model. Bearing stiff-nesses with design dimensions are up to 33% lower than those calculated by the Jones-Harris model. Gargiulo's model is worse.
Furthermore, these theoretical bearing models generally do not include important bearing details such as the crowning onthe rollers for roller bearings, race width, length and diameter of the chord that subtends the raceway for ball bearings, clearances,etc. These parameters highly affect bearing stiffness. The finite element/contact mechanics approach captures these details using aprecise description of all geometric features. The discrepancies in stiffness estimates, application limitations of the contact theory,and lack of important bearing details listed above suggest that the bearing stiffness estimate of the theoretical models [1-4] is lackof accuracy.
Radial load (kN)
600
500
400
300
200
100
0
Rad
ial b
earin
g st
iffne
ss (
kN/m
m)
700
0 2 4 6 8 10
Cylindrical Bearing C
Ball Bearing D
Fig. 8. Radial stiffness calculated by the proposed method with design (··o··) and unrealistic (··!··) bearing dimensions and Harris's model [1] (") of cylin-drical bearing C and radial ball bearing D. Dimensions of bearings C and D are described in Tables 3 and 4. Radial clearance is not considered to match the Harrismodel assumption.
Table 7Single row angular ball bearing E parameters (based on SKF ALS28ABP bearing).
Parameters Values (mm,degree)
Number of rows 1Number of rolling elements 16Contact angle 20, 35Pitch diameter 125.3Bore diameter 89.50Ball diameter 22.23Bearing width 28.60Outer diameter 165.0Axial clearance 0Outer diameter of inner raceway 111.5Inner diameter of outer raceway 138.5Inner race crown curvature 0.520Outer race crown curvature 0.520
42 Y. Guo, R.G. Parker / Mechanism and Machine Theory 51 (2012) 32–45

0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 10
5
10
15
20
25
30
35
Ball Pass Period
Non
dim
ensi
onal
ized
Off-
Dia
gona
l Stif
fnes
s
sxy
s x#y
s y#x
x#ys#
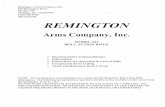
Fig. 10. Nondimensionalized off-diagonal stiffness of cylindrical bearing C in a ball pass period. The applied load vector equals F =(323 N; 908 N; 0;"825Nmm;293Nmm). sij $
kij#5
n$1 knn" #=5 ' 100; i; j;n $ x; y; z; $x ; $y . szz and its coupling terms vanish within the period with zero crowning on the cylinders.
0 2 4 6 8 10Axial load (kN)
Axi
al s
tiffn
ess
(103
kN/m
m)
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
0 2 4 6 8 10Axial load (kN)
Axi
al s
tiffn
ess
(103
kN/m
m)
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1b
a
Fig. 9. Comparison between the proposed method with design (o) and unrealistic (!) bearing dimensions, the Harris-Jones model [1,2] ("), and the Gargiulo's[5] model ("") for axial stiffnesses of angular contact ball bearing E with contact angles of (a) 20 degree and (b) 35 degree. Dimensions of bearing E are inTable 7.
43Y. Guo, R.G. Parker / Mechanism and Machine Theory 51 (2012) 32–45

8. Cross-coupling terms in the stiffness matrix
Cross-coupling terms in the stiffness matrix indicate interactions between radial, axial, and tilting motions of rolling elementbearings. They demonstrate the coupling between shaft tilting motion, flexural motion of the structure connected to the outerrace, and shaft radial and axial motions. While common in many systems, this coupling was specifically seen in two experimentsrelated to the transmission systems motivating this paper [24,25].
The importance of cross-coupling terms is investigated by comparing amplitudes of these terms to diagonal ones in the stiff-ness matrix. Figs. 10 and 11 show amplitudes of the cross-coupling terms in the stiffness matrix of cylindrical bearing C and radialball bearing D in their ball passing periods. The ball pass period T $ 2
Z' 1"DeDp
! " is defined as the amount of time between one rolling
element leaving a reference point and the next rolling element arriving. Here, Z is the number of rolling elements, ' denotes theshaft speed, and quantities De and Dp denote the diameter of the rolling elements and pitch diameter of the bearing, respectively.
Off-diagonal bearing stiffnesses in Figs. 10 and 11 are nondimensionlized as sij $kij
#5n$1 knn=5
' 100; i; j;n $ x; y; z; $x; $y, which are
divided by the mean amplitude of diagonal stiffnesses in the ball passing period of each bearing. Amplitudes of the cross-coupling terms are significant compared to diagonal ones. The maximum of s$xy is 34% of the average diagonal stiffness. s$xy isthe dominant coupling effect of cylindrical bearing C (Fig. 10). s$xy is, however, ignorable for radial ball bearing D (Fig. 11). Themaximum of sz$y is 19% of the average diagonal stiffness for bearing D, showing that coupling between the shaft tilting motionand housing flexural motion is important for radial ball bearing D. In contrast, sz$y=0 for cylindrical roller bearing C.
In addition, the locations of the rolling elements and the surface portions in contact change as the bearing rotates. When load-ed rolling elements rotate about the shaft axis, the number of rolling elements in contact and the load carried by individual rollingelements change periodically. This leads to periodically varying bearing stiffness matrices as shown in Figs. 10 and 11.
9. Conclusions
A finite element/contact mechanics bearing model is established based on a contact algorithm suited to high-precision elasticbodies and well-established for gear tooth contact mechanics. The load-dependent rolling element contact for all roller-race con-tacts throughout the entire bearing is solved through a combined solution based on surface integral (for the near-field) and finiteelement approaches (for the far-field). The computational model includes all the important bearing details besides basic geome-try, such as, internal clearance, roller and race crowning, race width and thickness, and dimensions of the raceway shoulders.These parameters significantly affect bearing stiffness.
Using the finite element/contact mechanics model, a stiffness determination method based on finite difference analysis isdeveloped to provide accurate stiffness estimates for rolling element bearings. The accuracy order of this method depends onthe finite element/contact mechanics analysis and the step size selected for the finite difference formulae. Without knowingthe exact solution, an iteration scheme is introduced to estimate the accuracy order of the finite element analysis. The selectedstep size of the finite difference formulae strongly affects accuracy of the results, which stresses the importance of investigatingthe optimal size range.
This stiffness determination method is validated against experiments in the literature. Comparisons against published modelsprovide further validation and expose shortcomings of analytical models.
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 10
5
10
15
20
25
30
35
Ball Pass Period
Non
dim
ensi
onal
ized
Off-
Dia
gona
l Stif
fnes
s
sxy
#x#yssz#y
s x#ys y#x
Fig. 11. Nondimensionalized off-diagonal stiffnesses of ball bearing D in a ball pass period. The applied load vector equals F=(317 N; 894 N; 0;"9.7Nmm;3.6Nmm). sij $
kij#5
n$1 knn" #=5 ' 100; i; j;n $ x; y; z; $x; $y . szz is close to 1.25% within the period and so not shown in the figure.
44 Y. Guo, R.G. Parker / Mechanism and Machine Theory 51 (2012) 32–45

This method determines the fully-populated stiffness matrix of rolling element bearings. The computed stiffness matrixcaptures the coupling between radial, axial, and tilting deflections of rolling element bearings. These cross-coupling terms aresignificant compared to diagonal ones for the bearings considered in this study.
The contact characteristics change under bearing rotation as rolling elements enter and leave the region of loaded rollers. Inconsequence, all elements in the stiffness matrix fluctuate periodically about the ball pass frequency. These fluctuations influencequasi-static system response and can potentially excite vibration of the connected structures.
Acknowledgment
This study was supported by NASA through contract NNC08CB08C. The authors thank Dr. Sandeep M. Vijayakar of AdvancedNumerical Solutions, Inc. for providing the finite element software, Mr. Fred Oswald for generously providing stiffness estimatesusing COBRA, and Mr. Aydin Gunduz for a valuable discussion on the REBM program.
References
[1] T.A. Harris, Rolling bearing analysis, 3rd edition John Wiley and Sons, Inc., 1990.[2] A.B. Jones, Analysis of stresses and deflections, New Departure Engineering Data, General Motors, 1946.[3] A. Palmgren, Ball and roller bearing engineering, S. H. Burbank, Philadelphia, 1959.[4] J. Brandlein, P. Eschmann, L. Hasbargen, K. Weigand, Ball and roller bearings: theory, design and application, John Wiley and Sons, 1999.[5] E.P. Gargiulo Jr., A simple way to estimate bearing stiffness, Machine Design (1980) 107–110.[6] T.C. Lim, R. Singh, Vibration transmission through rolling element bearings, part I: Bearing stiffness formulation, Journal of Sound and Vibration 139 (1990)
179–199.[7] A. Bourdon, J.F. Rigal, D. Play, Static rolling bearing models in a cad. environment for the study of complex mechanisms: Part i: Rolling bearing model, Journal
of Tribology 121 (1999).[8] H.V. Liew, T.C. Lim, Analysis of time-varying rolling element bearing characteristics, Journal of Sound and Vibration 283 (2005) 1163–1179.[9] J. Kraus, J.J. Blech, S.G. Braun, In situ determination of rolling bearing stiffness and damping by modal analysis, Journal of Vibration, Acoustics, Stress, and
Reliability in Design 109 (1987) 235–240.[10] T.J. Royston, I. Basdogan, Vibration transmission through self-aligning (spherical) rolling element bearings: Theory and experiment, Journal of Sound and
Vibration 215 (1998) 997–1014.[11] T.L.H. Walford, B.J. Stone, The measurement of the radial stiffness of rolling element bearings under oscillating conditions, Journal of Mechanical Engineering
Science 22 (1980) 175–181.[12] R. Tiwari, V. Chakravarthy, Simultaneous identification of residual unbalances and bearing dynamic parameters from impulse responses of rotor-bearing
systems, Mechanical Systems and Signal Processing 20 (2006) 1590–1614.[13] R. Tiwari, A.W. Lees, M.I. Friswell, Identification of speed-dependent bearing parameters, Journal of Sound and Vibration 254 (2002) 967–986.[14] M.J. Goodwin, Experimental techniques for bearing impedance measurement, Journal of Engineering for Industry 113 (1991) 335–342.[15] S.M. Vijayakar, Calyx User's Manual, http://ansol.com2005.[16] A.A. Seireg, Friction and lubrication in mechanical design, Marcel Dekker, Inc., 1998.[17] S.M. Vijayakar, A combined surface integral and finite element solution for a three-dimensional contact problem, International Journal for Numerical
Methods in Engineering 31 (1991) 524–546.[18] S.M. Vijayakar, H. Busby, D. Houser, Linearization of multibody frictional contact problems, Computers and Structures 29 (1988) 569–576.[19] S.M. Vijayakar, H.R. Busby, L. Wilcox, Finite element analysis of three-dimensional conformal contact with friction, Computers and Structures 33 (1989)
49–61.[20] R.G. Parker, S.M. Vijayakar, T. Imajo, Non-linear dynamic response of a spur gear pair: modelling and experimental comparisons, Journal of Sound and
Vibration 237 (2000) 435–455.[21] R.G. Parker, V. Agashe, S.M. Vijayakar, Dynamic response of a planetary gear system using a finite element/contact mechanics model, Journal of Mechanical
Design 122 (2000) 304–310.[22] A. Kahraman, S.M. Vijayakar, Effect of internal gear flexibility on the quasi-static behavior of a planetary gear set, Journal of Mechanical Design 123 (2001)
408–415.[23] Y. Guo, R.G. Parker, Dynamic modeling and analysis of a spur planetary gear involving tooth wedging and bearing clearance nonlinearity, European Journal
of Mechanics A/Solids 29 (2010) 1022–1033.[24] K. Ishida, T. Matsuda, M. Fukui, Effect of gearbox on noise reduction of geared device, Proceedings of the International Symposium on Gearing and Power
Transmissions, Tokyo, 1981, pp. 13–18.[25] A.M. Mitchell, F.B. Oswald, H.H. Coe, Testing of uh-60a helicopter transmission in nasa lewis 2240kw (3000-hp) facility, NASA Technical Paper 2538
(Document ID: E-2801; NAS 1.60:2538; NASA-TP-2538), 1986.[26] T.J. Baker, On the relationship between mesh refinement and solution accuracy, 17th AIAA Computational Fluid Dynamics Conference, Toronto, Canada,
2005.[27] P.J. Roache, Verification of codes and calculations, AIAA Journal 36 (1998) 696–702.[28] P.J. Roache, Perspective: a method for uniform reporting of grid refinement studies, Journal of Fluids Engineering 116 (1994) 405–413.[29] K. Turner, H.F. Walker, Efficient high accuracy solutions with gmres(m), Journal of Scientific and Statistic Computing 13 (1992) 815–825.[30] A.B. Jones, J. Poplawski, A computer study of design parameters on rolling element bearing performance, Bearings Conference at Dartmouth University,
1966.[31] J. Poplawski, COBRA® Bearing Analysis Software, http://www.bearingspecialists.com 2001–2011.[32] A.B. Jones, A general theory for elastically constrained ball and radial roller bearings under arbitrary load and speed conditions, ASME Journal of Basic
Engineering 82 (1960) 309–320.[33] S.A. Hambric, A.D. Hanford, M.R. Shepherd, R.L. Campbell, E.C. Smith, Rotorcraft transmission noise path model, including distributed fluid film bearing
impedance modeling, NASA Technical Report Contract No. NNC08CB07C, 2010.[34] P. Johns, R. Gohar, Roller bearings under radial and eccentric loads, Tribology International 14 (1981) 131–136.[35] M.F. While, Rolling element bearing vibration transfer characteristics: effect of stiffness, Journal of Applied Mechanics 46 (1979) 677–684.[36] R. J.W. Knaapen, Experimental determination of rolling element bearing stiffness, Ph.D. thesis, Eindhoven University of Technology, Eindhoven, The Netherlands,
1997.
45Y. Guo, R.G. Parker / Mechanism and Machine Theory 51 (2012) 32–45