
MIT CSAIL Vision interfaces Towards efficient matching with random hashing methods… Kristen...
15
MIT CSAIL Vision interfaces Towards efficient matching with random hashing methods… Kristen Grauman Gregory Shakhnarovich Trevor Darrell
-
Upload
carson-moreton -
Category
Documents
-
view
219 -
download
0
Transcript of MIT CSAIL Vision interfaces Towards efficient matching with random hashing methods… Kristen...

MIT CSAILVision interfaces
Towards efficient matching with random hashing methods…
Kristen GraumanGregory Shakhnarovich
Trevor Darrell

MIT CSAILVision interfaces
Motivation: Content-based image retrieval
Data set of 30 scenes in Boston• 1,079 database images• 89 query images
Features:• Harris-Affine detector (max m=3,595)
• MSER detector(max m=1,707)
• SIFT-PCA descriptors
Query
MIT CSAILVision interfaces
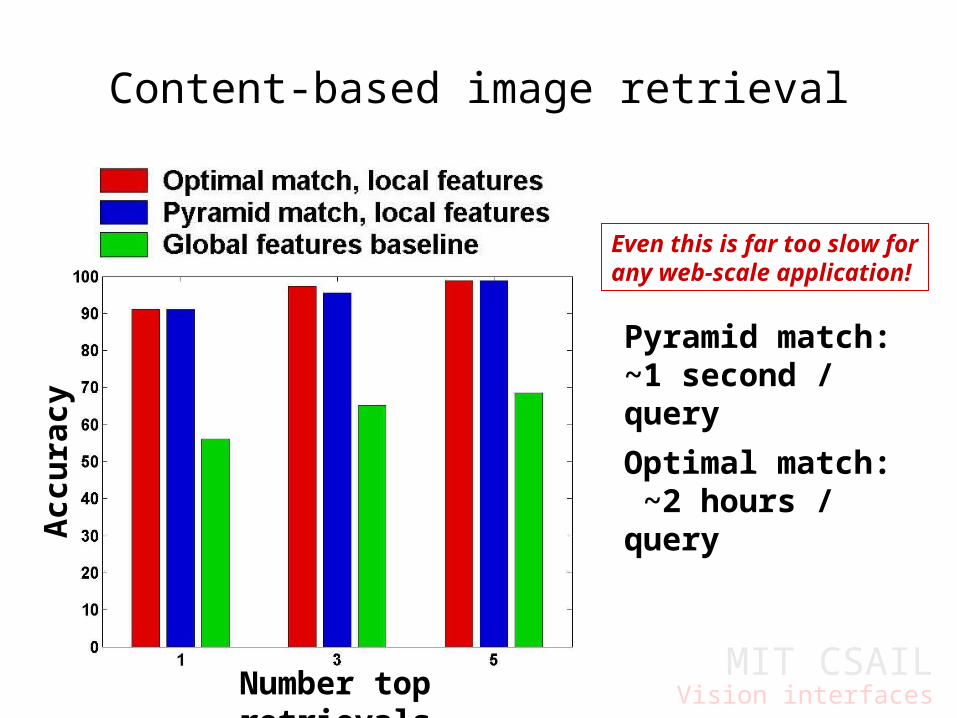
Content-based image retrieval
Pyramid match: ~1 second / query
Optimal match: ~2 hours / query
Number top retrievals
Acc
ura
cy
Even this is far too slow forany web-scale application!

MIT CSAILVision interfaces
Sub-linear time image search
N
<< N
h0111101
0110111
0110101
Randomized hashing techniques useful for sub-linear query time of very large image databasesN
Linear scan
MIT CSAILVision interfaces
Pyramid match hashing
• For fixed-size sets, Locality-Sensitive Hashing [Indyk & Motwani 1998] provides bounded approximate similarity search over bijective matching [Indyk & Thaper 2003]; [Grauman & Darrell CVPR 2004, 2005]
• For varying set sizes, embedding of pyramid match (with product normalization) makes random hyperplane hashing possible under set intersection hash family of [Charikar 2002]. [Grauman PhD 2006]

MIT CSAILVision interfaces

MIT CSAILVision interfaces

MIT CSAILVision interfaces
MIT CSAILVision interfaces
Single Frame Pose Estimation via Approximate Nearest Neighbor regression
• Obtain large DB of pose-appearance mappings• Exploit fast methods for approximate nearest
neighbor search in high dim. spaces. (e.g., LSH [Indyk and Motwani ‘98-’00].)

MIT CSAILVision interfaces
Approximate nearest neighbor techniques
… … …Rendered (& hashed)PoseDB
input
Hashfcns.
similar examples fall into same bucket in one or more hash table

MIT CSAILVision interfaces
Single Frame Pose Estimation via Approximate Nearest Neighbor regression
• Render large DB of pose-appearance mappings• Exploit fast methods for approximate nearest neighbor
search in high dim. spaces. (e.g., LSH [Indyk and Motwani ‘98-’00].)
Problem: signal distance dominated by nuisance variables
Idea: find embedding (i.e., hash functions for LSH) most relevant to parameter (pose) similarity… [Shakhnarovich et. al ’03, Shakhnarovich ‘05]
MIT CSAILVision interfaces
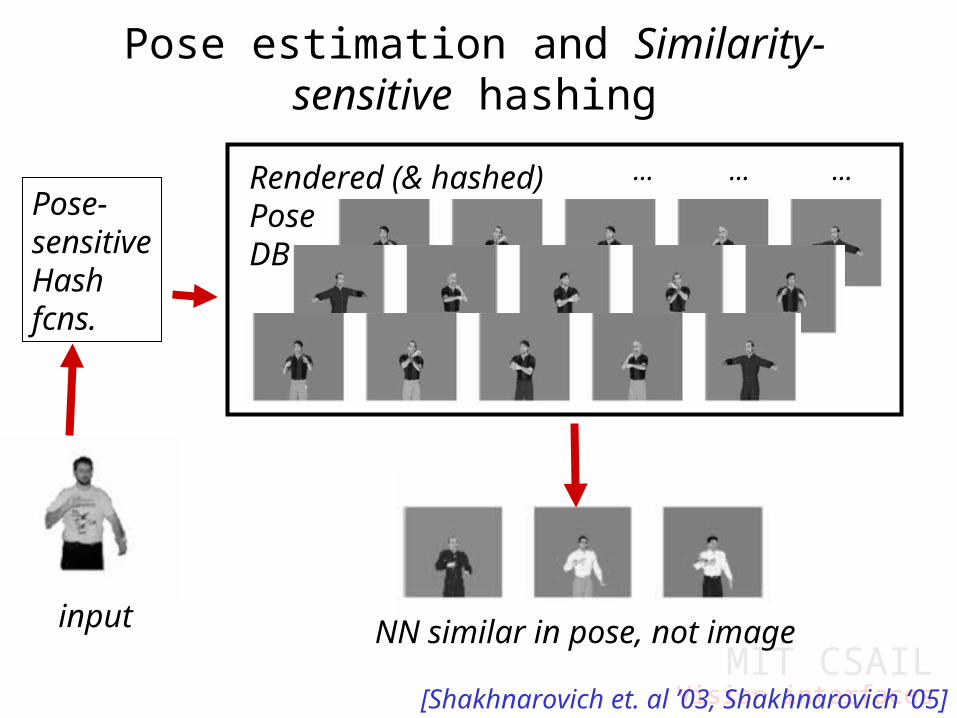
Pose estimation and Similarity-sensitive hashing
… … …Rendered (& hashed)PoseDB
input
Pose-sensitiveHashfcns.
NN similar in pose, not image
[Shakhnarovich et. al ’03, Shakhnarovich ‘05]
MIT CSAILVision interfaces
SSE / BoostPro
Similarity Sensitive Embedding
- Compute embedding H: I {0, 1}N such that
| H(I(1)) - H(I(2)) | is small if 1 is close to 2
| H(I(1)) - H(I(2)) | is large otherwise
- Use the embedding with approximate nearest neighbors retrieval (LSH)
- Find H by training boosted classifier to learn “same-pair” and concatenate resulting weak learners …
[Shakhnarovich 2005]

MIT CSAILVision interfaces
PSH results
~200,000 examples in DB; 2 sec
[Shakhnarovich et al. 2003, 2005]
MIT CSAILVision interfaces
Conclusions
• Random Hashing techniques allow broad search; well suited for very high dimensional spaces
• Useful in domains where there is no prior knowledge about how to cluster or model data…
• Similarity (parameter) sensitive hashing can find distance related to task…effectively learn problem dependent distance measure and efficient means to index.


















