Minimising Fuel Consumption of a Series Hybrid Electric ...liu.diva-portal.org › smash › get ›...
58
Master of Science Thesis in Electrical Engineering Department of Electrical Engineering, Linköping University, 2017 Minimising Fuel Consumption of a Series Hybrid Electric Railway Vehicle Using Model Predictive Control Niklas Sundholm
Transcript of Minimising Fuel Consumption of a Series Hybrid Electric ...liu.diva-portal.org › smash › get ›...

Master of Science Thesis in Electrical EngineeringDepartment of Electrical Engineering, Linköping University, 2017
Minimising FuelConsumption of a SeriesHybrid Electric RailwayVehicle Using ModelPredictive Control
Niklas Sundholm

Master of Science Thesis in Electrical Engineering
Minimising Fuel Consumption of a Series Hybrid Electric Railway VehicleUsing Model Predictive Control
Niklas Sundholm
LiTH-ISY-EX--17/5095--SE
Supervisor: Måns Klingsporisy, Linköping University
Keiichiro KondoDepartment of Electrical and Electronic Engineering, Chiba University
Examiner: Martin Enqvistisy, Linköping University
Automatic ControlDepartment of Electrical Engineering
Linköping UniversitySE-581 83 Linköping, Sweden
Copyright © 2017 Niklas Sundholm

Abstract
With the increasing demands on making railway systems more environmentallyfriendly, diesel railcars have been replaced by hybrid electric railway vehicles. Ahybrid system holds a number of advantages as it has the possibility of recuperat-ing energy and allows the internal combustion engine (ice) to be run at optimalefficiency. However, to fully utilise the advantages of a hybrid system the hybridelectric vehicle (hev) is highly dependent on the used energy management strat-egy (ems).
In this thesis, the possibility of minimising the fuel consumption of the series hy-brid electric railway vehicle, Ki-Ha E200, has been studied. This has been doneby replacing the currently used ems, based on heuristics, with a model predictivecontroller (mpc). The heuristic ems and thempc have been evaluated by compar-ing the performance results from three different test cases. The performance ofthe implementedmpc seems promising as it yields more optimal operation of theice and improved control of the battery state of charge (soc).
iii


Acknowledgments
Firstly, I want to express my utmost gratitude to Shigetomo Shiraishi, ToshibaCorporation Railway Systems Division, for making this thesis work possible andKeiichiro Kondo, Chiba University, for accepting me to his laboratory. Further,I want to thank Martin Enqvist and Måns Klingspor for their valuable help anddiscussions through out this thesis work.
Tokyo, June 2017Niklas Sundholm
v


Contents
Notation ix
1 Introduction 11.1 Background . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11.2 Purpose . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 21.3 Objective . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 21.4 Methodology . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 31.5 Limitations . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 31.6 Thesis Outline . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3
2 Series Hybrid Electric Railway Vehicle Modelling 52.1 Hybrid Electric Vehicle Powertrain . . . . . . . . . . . . . . . . . . 52.2 Train Motion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7
2.2.1 Train Resistances . . . . . . . . . . . . . . . . . . . . . . . . 102.3 Internal Combustion Engine . . . . . . . . . . . . . . . . . . . . . . 112.4 Battery . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 122.5 Model Equation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15
3 Controller Design 173.1 MPC Basics . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 173.2 Hybrid MPC . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 19
3.2.1 Piecewise Affine Model . . . . . . . . . . . . . . . . . . . . . 193.2.2 Mixed-Integer Programming . . . . . . . . . . . . . . . . . . 213.2.3 Objective Function . . . . . . . . . . . . . . . . . . . . . . . 223.2.4 Constraints . . . . . . . . . . . . . . . . . . . . . . . . . . . . 233.2.5 Softened Constraints . . . . . . . . . . . . . . . . . . . . . . 253.2.6 Move-Blocking . . . . . . . . . . . . . . . . . . . . . . . . . 26
4 Results 294.1 Heuristic Controller . . . . . . . . . . . . . . . . . . . . . . . . . . . 294.2 Test Cases . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 314.3 Simulator . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 324.4 Simulation Results . . . . . . . . . . . . . . . . . . . . . . . . . . . . 32
vii

viii Contents
4.5 Discussion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 41
5 Conclusions and Future Work 455.1 Conclusions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 455.2 Future Work . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 46
Bibliography 47

Notation
Abbreviations
Abbreviation Interpretation
hev Hybrid Electric Vehicleems Energy Management Strategyice Internal Combustion Engineac Alternating Currentdc Direct Currentsoc State of Chargempc Model Predictive Controlpwa Piecewise Affinemip Mixed-Integer Programmingqp Quadratic Programmingmiqp Mixed-Integer Quadratic Programming
ix


1Introduction
This master’s thesis presents the results of the work that was conducted at ToshibaCorporation Railway Systems Division in cooperation with Chiba University, Ja-pan.
1.1 Background
With the rise of environmental issues, due to global warming, emphasis has beenput on making systems more environmentally friendly. In the case of the railwayindustry, different measures have been taken to reduce the total energy consump-tion and the environmental burden of trains. Among the measures that havebeen taken are weight saving, improved component efficiencies and utilisation ofregenerative braking. Within the railway transportation system there are manynon-electrified sections, mainly in rural areas, where diesel trains are operated.One of the major drawbacks of diesel trains, apart from their exhaust emissions,is their inability to recuperate energy through regenerative braking.
In 2003, East Japan Railway Company addressed the environmental burden ofdiesel railway vehicles by developing the world’s first railcar, Ki-Ha E200, utilis-ing a hybrid system. A hybrid electric vehicle (hev) combines the conventional in-ternal combustion engine (ice) with an electric motor that will, depending on thehybrid configuration, fully or partially act as the main propulsion system. Thepresence of an electrochemical storage device is common in most modern hybridsystems. The railcar Ki-Ha E200 uses a diesel engine as ice and a lithium-ion bat-tery as storage device [6]. Ki-Ha E200 started operational services in 2007 [13]. Ahev holds a number of advantages compared to a diesel railcar. A hybrid system
1

2 1 Introduction
has the possibility of recuperating energy through regenerative braking, down-sizing of the engine, running the diesel engine at its optimal efficiency, reducingtoxic substances in the exhaust emission and reducing noise levels when runninginside stations.
In order to fully utilise the advantages of a hybrid system, a supervisory energymanagement strategy (ems) is needed to determine the optimal combination ofthe available power sources. A great amount of research has been done in op-timal control of hevs, with the majority targeted towards automobiles [16]. Asthe computational power of modern computers has increased it has allowed theuse of computationally heavy control methods such as model predictive control(mpc) [18], [17]. The principles used for automobiles can similarly be appliedto locomotives as well. In [12] the optimal operation of railway vehicles, min-imising total energy consumption, is analysed by comparing the use of dynamicprogramming, the gradient method and sequential quadratic programming. It isstated that none of the aforementioned methods are applicable for real-time con-trol. However, mpc can be seen as an approximation of dynamic programmingand could be realisable in railway applications if a control cycle of 1 second orless is achieved.
1.2 Purpose
The series hev Ki-Ha E200 currently uses a heuristic ems, based on the hevsspeed and the state of charge (soc) of the storage battery, to determine the opera-tion of the ice. The performance of the heuristic ems is highly dependent on therunning pattern of the train and can therefore not guarantee optimal control. Thepurpose of this master’s thesis is to investigate the possibility of minimising thefuel consumption of the Ki-Ha E200 by replacing the current ems with a hybridmpc instead.
1.3 Objective
The objective of this master’s thesis can be divided into a number of sub-objectiv-es. Firstly, a basic model of the series hev Ki-Ha E200 should be developed. Themodel will be used to simulate the target hev and in the design of the hybridmpc. The existing heuristic ems should be implemented and its performanceshould be used as a benchmark for the hybrid mpc. The performance of the twoems should be compared and analysed.

1.4 Methodology 3
1.4 Methodology
A general study of the target railway system was conducted to determine thescope of the thesis work and to understand the basic principles. Secondly, amore specific literature study of emss used in the control of hevs was carriedout, where the focus was specifically set on earlier applications ofmpc. To imple-ment an mpc, with satisfactory performance, a precise model is required. Sinceno data was available for system identification, theoretical studies of the traincomponents were carried out. To simplify the modelling of the hev certain com-ponents have been assumed to be static, while emphasising the modelling of thetrain motion, diesel engine and battery dynamics.
Since previous modelling of the Ki-Ha E200 varied from the derived train modelin this thesis work, the existing heuristic emswas implemented and used as a per-formance benchmark. Due to the non-linearities in the derived train model, themodel was approximated by a number of piecewise affine (pwa) models insteadthat could be used as an internal model in the hybrid mpc. The performance ofthe hybrid mpc and heuristic emss was evaluated by applying them to predeter-mined test cases and comparing the acquired results.
1.5 Limitations
The thesis is limited to the modelling of a series hybrid electric railway vehicle.The modelling is based on the train specifications and performance limitationsof the railway vehicle Ki-Ha E200. Furthermore, only longitudinal motion of thetrain has been considered in this thesis, thus a straight track has been assumedin all of the test cases. All implementation and simulation is done using Mat-lab and Simulink. Due to performance restrictions in the platform used torun simulations, the mpc prediction horizon is limited to a maximum of 40 timesteps.
1.6 Thesis Outline
Chapter 2 introduces the target hev Ki-Ha E200 and gives a basic overview ofits components. More detailed modelling of the train motion, ice and battery dy-namics is given. The results of the modelling is summarised in a model equationused to simulate the train dynamics and to develop the hybrid mpc.
Continuing, Chapter 3 explains the basic theory of mpc. The basic mpc theoryis expanded to describe hybrid mpc and miqp optimisation problems. After cov-ering the hybrid mpc prerequisite, the design and implementation of the hybridmpc constraints and objective function is described.

4 1 Introduction
In Chapter 4, the simulator implementation is presented. A short description ofthe heuristic controller is given followed by a presentation of the test cases thatare used to analyse the performance of the emss. The simulation results are thenpresented, followed by a discussion and analysis of the obtained results.
Finally, Chapter 5 concludes the thesis and a few ideas of possible future workare mentioned.

2Series Hybrid Electric Railway Vehicle
Modelling
This chapter aims at deriving a realistic model of a series hev. The train pa-rameters are based on the Ki-Ha E200 specifications given in [13] and [14]. Thepurpose of the model is to describe the train dynamics, which can be used to sim-ulate the train and implement an mpc. Modelling a complete railway vehicle isa complex task, thus various simplifications have to be done. The modelling ofthe train motion and battery dynamics is mainly based on the theory presentedin [9].
2.1 Hybrid Electric Vehicle Powertrain
An hev combines an ice with an electric propulsion system. The combination ofthese two propulsion systems allows for a more efficient system at the cost of amore complex structure and control. Depending on the objective of the system,different hev configurations are used. hevs are classified into series, parallel orseries-parallel hybrid systems depending on how the powertrain’s componentsare configured. The hev configuration determines how the power from the iceand/or electric motor is delivered to the wheels of the vehicle.
The train Ki-Ha E200 is a series hev, which is the simplest kind of hybrid con-figuration. The usage of this configuration holds a number of advantages. Firstly,energy can be recovered through regenerative braking and stored in the battery.This is done by using the traction motor as a generator to convert the train’s ki-netic energy into electrical energy during deceleration of the train. Secondly, thediesel engine can be operated at its optimal fuel efficiency, with minimum ex-haust fumes, since the engine operation does not directly depend on the power
5

6 2 Series Hybrid Electric Railway Vehicle Modelling
requirements of the train. This also allows for the ice to be completely shut off,to avoid idling, when the train is standing still. Furthermore, the train can bepowered solely using the battery to reduce noise levels and emissions when ap-proaching and stopping at train stations.
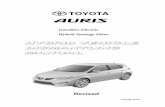
A schematic figure of the component configuration of the series hev Ki-Ha E200is depicted in Figure 2.1. A description of the notation used in Figure 2.1 and abrief overview of the components is given below.
The internal combustion engine (ICE) converts chemical energy, stored in thefuel, to mechanical energy. The ice receives the input signal P ∗ice, which is a refer-ence for the desired ice power, and outputs the power Pice. Since the knowledgeabout the diesel engine is limited, the ice dynamics have been approximated bya simple expression presented in Section 2.3.
The mechanical energy from the ice is transformed into electrical energy by theelectric generator (EG). The generator is a three-phase induction generator thatoutputs alternating current (ac). The dynamics of the electric generator will notbe modelled and will be considered static, described by the efficiency constantηeg .
The direct current (dc) link (DC) connects the ac circuits in the hev. It is as-sumed that there are no losses in the dc link. To connect the electric generatorto the dc link the ac output has to be converted to dc first. The conversionis done by using a converter (CONV), which is a pulse width modulation recti-fier. The converter is considered static and is described by the efficiency constantηconv .
A battery (B) and auxiliary power supply unit (AUX) is connected to the dc link.These are both dc components that use the same voltage as the dc link, henceno conversion is required. The battery transforms electrical energy to chemicalenergy and vice versa. A more detailed description and model of the battery canbe found in Section 2.4. The auxiliary power supply unit supplies power to theair-conditioning and interior lights of the hev. The supplied power is assumedto be the constant power Paux at all times.
The electric motor (EM), or traction motor, is a three-phase induction motor. Theelectric motor is controlled by an inverter (INV), which transforms dc to ac.
Figure 2.1: Component configuration of the series hev Ki-Ha E200. Thearrows indicate the power flow directions.

2.2 Train Motion 7
The inverter is bi-directional meaning that it can pass power in both directions,making it suitable for both regeneration and motor control. This component isconsidered static in this thesis and is described by the efficiency constant ηinv .The electric motor can be used either to propel the train or as a generator inthe case of regenerative braking. When the train is propelled the electric motorconverts electrical energy into mechanical energy and when regenerative brakingis used the electric motor converts the train’s kinetic energy into electrical energy.In this thesis, the electric motor is considered static with the same efficiency, ηem,for both operations.
The gear-box (GB) provides an angular velocity and torque conversion betweenthe electric motor output and the wheels of the hev. This component is consid-ered static and is described by the efficiency constant ηgb. The power output atthe wheels of the hev is denoted Pout .
Based on the brief description of the hev’s component’s functionality and theircircuit connection, an analysis of the power flow at the dc link yields
Pconv(t) + Pb(t) − Pinv(t) − Paux = 0, (2.1)
where Pconv(t) is given by
Pconv(t) = ηconvηegPice(t). (2.2)
As mentioned above, Pinv(t) depends on if the electric motor is operating as atraction motor or as a generator. The efficiency is assumed to be the same forboth operations, thus the inverter power is calculated according to
Pinv(t) =
Pout(t)ηinvηemηgb
, powering
ηinvηemηgbPout(t). regenerating(2.3)
More detailed descriptions and modelling of the vehicle motion, the ice and thebattery dynamics are described in the sections below.
2.2 Train Motion
This section aims at developing a simple model that describes the main dynamicsof the train motion. By limiting the train to only move in one direction, the cur-vature of the track can be neglected and only the longitudinal dynamics need tobe studied. The longitudinal dynamics of a railway vehicle, running at a certainspeed v along a track with inclination α, can be expressed by Newton’s secondlaw of motion as
mdv(t)dt
= Ft(t) − Fmb(t) − Ftr (t) − Fg (t), (2.4)

8 2 Series Hybrid Electric Railway Vehicle Modelling
Figure 2.2: Forces acting on a railcar running at speed v along a track in-clined by the angle α.
where Ft is the tractive force, Fmb the mechanical break force, Ftr the train resis-tance and Fg the gravitational force. The equivalent mass of the hev’s rotatingparts, such as the wheels and ice, is assumed to be included in m in (2.4). Themass that has been added due to the inertia of the train’s rotating parts, is as-sumed to be 10% of the train weight. Figure 2.1 depicts the forces acting on arailway vehicle when running along an inclined track.
The amount of energy that the train consumes per unit time is referred to as theoutput power of the railway vehicle and is calculated as
Pout(t) = Ft(t)v(t), (2.5)
where the tractive force Ft(t) is the force exerted on the railway vehicle’s drivingwheels. Apart from the train resistance, which will cause the train to decelerate,the tractive and gravitational force determines the acceleration or deceleration ofthe train.
When a train is designed, suitable components have to be chosen to meet therequirements that have been set on the performance of the train. The chosencomponents will determine the characteristics of the traction system which isdescribed by the tractive and brake force curves.
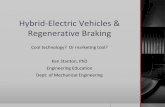
The tractive force Ft(t) is constrained to a value between Ft,min and Ft,max. Thevalue of the tractive force determines if the train is powering, braking or coasting.A positive value corresponds to propelling (powering) the train, a negative valuecorresponds to braking and a value of zero corresponds to coasting. Dependingon the speed of the train, different factors limit the max- and minimum tractiveforce. The tractive and brake curves can be divided into the constant torqueregion, the constant power region and the characteristics region. In the constanttorque region the tractive force is limited due to the maximum possible currentbeing used. In the constant power region the tractive force is limited due to themaximum possible vehicle output and in the vehicle characteristics region thetractive force is limited due to the characteristics of the train’s components. Theregenerative brake force is limited in the higher speed regions because of thecharacteristics of the traction motor. A mechanical brake force Fmb is available toachieve constant deceleration over the entire speed range.

2.2 Train Motion 9
0 10 20 30 40 50 60 70 80 90 100
v [km/h]
-30
-20
-10
0
10
20
30
40
[kN
]
Ft,max
Ft,min
Fmb
Figure 2.3: hev maximum and minimum traction force (blue), regenerativebrake force (red) and mechanical brake force (black) curves.
The tractive and regenerative brake force curves used in this thesis are based onthe Ki-Ha E200 specifications in [14]. Unfortunately, the curves need to be modi-fied as they contain errors. The power should be constant in the constant powerregion, which it is not. The tractive and brake force curves have been recalcu-lated using the same constant torque, constant power and characteristics regionsas in the Ki-Ha E200 specifications. The curves have been calculated assuminga maximum acceleration of amax = 2.3 km/h/s and a maximum deceleration ofamin = −2.0 km/h/s. The maximum passenger capacity of the Ki-Ha E200 is 117passengers. The average weight of a passenger has been assumed to be 60 kg,resulting in a maximum passenger weight mp = 7020 kg. A common practice inthe design of a traction system, in the railway industry, is to add an additionalforce of 29.43 N (3 kgf) per ton of the maximum weight mmax = m + mp to themaximum tractive force in the constant torque region. This is done to guaranteethat the train’s internal starting resistances are overcome. The maximum tractiveforce curve Ft,max can be calculated according to
Ft,max =
mmaxamax + 0.02943mmax, 0 ≤ v ≤ 20(mmaxamax + 0.02943mmax) · v
20 , 20 < v ≤ 70(mmaxamax + 0.02943mmax) · v
20 · v70 , 70 < v ≤ 100
(2.6)
and Ft,min as
Ft,min =
mmaxamin, 0 ≤ v ≤ 42mmaxamin · v
42 . 42 < v ≤ 100(2.7)
The resulting tractive and brake curves are shown in Figure 2.3.

10 2 Series Hybrid Electric Railway Vehicle Modelling
2.2.1 Train Resistances
An important aspect in the modelling of a railway vehicle is the resistances thataffect the train. Knowing which resistances that are present during the train oper-ation improves the understanding of their effects and ability to avoid them. Thetrain resistances can be divided into external and internal resistances. Internal re-sistances are directly associated with the train, whilst external resistances refer tothe terrain conditions where the train is operating. Further, internal resistancescan be separated into starting resistances and running resistances.
External Resistances
External resistances are caused by the nature in which the train is operating. Afew examples of external resistances are the track gradient, track curvature, windand air conditions, such as humidity. In this thesis, only longitudinal dynamicsare considered and a track gradient of α = 0 is assumed. This assumption allowsus to neglect the term Fg in (2.4) as the gravitational force, induced by the gravityacting on the train, is given by
Fg (t) = mgsin(α). (2.8)
The effect of wind and air conditions, along with any other external resistance,has been neglected.
Internal Resistances
When a train is standing still the couplers between carriages are usually in a slackposition. Before a train starts moving all couplers need to be tightened. Doing sois part of the starting resistance of a train. The starting resistance is only presentwhen a train is accelerating from stand still and rapidly decreases as the trainspeed increases. As mentioned earlier, a rule of thumb is to use a force of 29.43 Nper ton of the train’s maximum weight to overcome the starting resistance.
In the railway industry it is generally agreed that the internal running resistancecan be described by a quadratic function as
Frr (t) = r2v2(t) + r1v(t) + r0, (2.9)
where the constants r2, r1 and r0 vary depending on the train. The constantsare estimated through measurements of the train’s acceleration and decelerationwhile the train is running.
The constant r2 accounts for the aerodynamic resistance of quiet air and dependson the frontal area of the train. The aerodynamic resistance is mainly noticeableat high speeds.
The constant r1 describes the resistance that is directly proportional to the trainspeed. As a train is running along a track, the bogie and carriage are subject to

2.3 Internal Combustion Engine 11
lateral oscillations. This is known as bogie hunting and increases with the speedof the vehicle. The oscillations causes the bogie to move side to side across therail, retarding the train due to the sliding friction.
Lastly, r0 describes the resistances that do not depend on the speed of the vehi-cle. The value of r0 is determined by the rolling resistance, track resistance andbearing resistance.
If a flat track is assumed and external resistances are neglected, Ftr (t) in (2.4)can be replaced with the quadratic approximation of the running resistance (2.9).The train motion is then expressed by
mdv(t)dt
= Ft(t) − Fmb(t) − (r2v2(t) + r1v(t) + r0). (2.10)
The values of r2, r1 and r0, specific for Ki-Ha E200, can be found in [14].
2.3 Internal Combustion Engine
The Ki-Ha E200 uses a diesel engine as its ice. The ice transforms the chemicalenergy stored in the fuel into mechanical power, which in turn is transformedinto electrical power by an electrical generator. Due to the hybrid configuration,the ice does not directly propel the train. This is one of the major benefits of ahybrid system as it allows the engine to be run at its optimal efficiency.
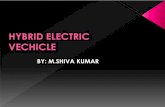
Due to the lack of information about the ice that is used in Ki-Ha E200, approx-imations of the engine dynamics have been made. The ice input is restrictedto one of four predetermined values for the power output reference signal P ∗ice.The ice power output is given by Pice. The available power output reference sig-nals are denoted P ∗ice,of f , P ∗ice,low, P ∗ice,opt and P ∗ice,max. The output power referencevalues are determined based on the ice output power and fuel efficiency specifi-cation shown in Figure 2.4. A summary of the ice output power reference valuesis given in Table 2.1.
Table 2.1: Summary of the ice output power reference values.
ice Engine Speed [rpm] iceOutput Power [kW] ice Fuel Efficiency [g/kWh]
P ∗ice,of f 0 0 0P ∗ice,low 1200 200 220.25P ∗ice,opt 1500 280 201.89P ∗ice,max 2000 330 216.13
Since no ice parameters are known, modelling the actual dynamics of the dieselengine is unachievable. The dynamic of the ice power output is therefore approx-

12 2 Series Hybrid Electric Railway Vehicle Modelling
1000 1200 1400 1600 1800 2000 2200
[rpm]
0
50
100
150
200
250
300
350
Pic
e [
kW
]
(a) ice output power.
1000 1200 1400 1600 1800 2000 2200
[rpm]
190
200
210
220
230
240
[g/k
Wh
]
(b) ice fuel efficiency.
Figure 2.4: ice output power and fuel efficiency as a function of enginespeed. The circled data points indicate the power reference values, fromleft to right, P ∗ice,low, P ∗ice,opt and P ∗ice,max.
imated by a first order differential equation
Pice(t) =P ∗ice(t) − Pice(t)
Tice, (2.11)
where Tice is the ice time constant.
2.4 Battery
The Ki-Ha E200 uses a rechargeable lithium-ion battery as storage battery due toits high power and energy density. The battery can either be used as an energysupply, used to propel the hev, or it can be used for energy storage. The storagebattery can be charged by the ice or by recuperating energy from regenerativebraking.
The battery model described in this section is based on the Ki-Ha E200 storagebattery specification given in [13]. It is stated that the storage battery consists oftwo groups of batteries, connected in parallel, where each group is composed ofa 4 series, 2 parallel connection of battery modules. Each battery module holds48 battery cells connected in series. The battery cell has a rated voltage of 3.6 Vand a nominal capacity of 5.5 Ah. However, the resistance of the battery cell isnot stated. Therefore the battery cell resistance has been chosen as 0.7 mΩ basedon the "LIM25H" battery specifications given in [15]. In this thesis, the batterytemperature will not be taken into account and will be assumed to be constant at25C. The physical battery model can be approximated by an equivalent circuit,shown in Figure 2.5. The battery is represented by an ideal voltage source Ub,oc,in series with an internal resistance Rb,i .

2.4 Battery 13
Figure 2.5: Battery equivalent circuit.
Knowing the battery configuration and specifications stated above one can calcu-late that the open circuit voltage is Ub,oc = 693 V, the internal resistance Rb,i =33.6 mΩ and the nominal battery capacity Q0 = 22 Ah. Further, the nominalenergy capacity of the battery is approximately 15.2 kWh. The maximum andminimum battery power is 300 kW and -300 kW, respectively.
By applying Ohm’s law and Kirchhoff’s voltage law to the equivalent circuit, thefollowing relations are obtained
Pb(t) = Ub(t)Ib(t), (2.12a)
Ub(t) = Ub,oc − Rb,i Ib(t). (2.12b)
An important aspect to consider when using a battery as a storage device is thestate of charge (soc) of the battery. The soc is the ratio
q(t) =Q(t)Q0
, (2.13)
between the current electric charge Q, that can be delivered by the battery, andthe nominal battery capacity Q0. In order to reduce losses in the conversion fromstored to delivered energy, it is desired to keep the soc within certain limits.Furthermore, the longevity of the battery will increase, which is important bothfrom an economic and sustainability viewpoint.
Both the open circuit voltage Ub,oc, which is the voltage between the terminalswhen there is no load applied, and the internal resistance Rb,i varies with thebattery soc. According to [9] these relationships can be approximated by thelinear expressions
Ub,oc(t) = κ2q(t) + κ1, (2.14a)
Rb,i(t) = κ4q(t) + κ3. (2.14b)
Due to the coefficients κ2 and κ4 being unavailable for the studied storage batterythese values have been assumed to be zero if the soc is kept within a certainrange. This leaves Ub,oc and Rb,i as constants. The internal resistance of the

14 2 Series Hybrid Electric Railway Vehicle Modelling
battery is not only affected by the battery soc, but also if the battery is beingcharged or discharged. This effect has been neglected to simplify the modellingof the battery.
There are no possible ways of directly measuring the soc of the battery. However,one possible method of estimating it is known as Coulomb Counting. This methodestimates the soc based on accurate direct measurements of the charge\dischargecurrent Ib(t) as
Q(t) = −Ib(t). (2.15)
In the case of charging, a small fraction of the charging current is not transformedinto charge. For simplicity this effect has been neglected in this thesis.
The change in soc can be expressed by inserting (2.15) into the time derivativeof (2.13)
q(t) =Q(t)Q0
= − Ib(t)3600Q0
. (2.16)
Note that Q0 is measured in the unit Ah and Ib(t) in A, thus Q0 needs to bemultiplied by 3600 in order to express the soc time derivative in per secondinstead of per hour.
It is favourable to express the change in soc in terms of battery power Pb insteadof the current Ib. Solving (2.12b) for Ib and inserting it in (2.16) gives
q(t) = −Ub,oc − Ub(t)3600Q0Rb,i
. (2.17)
Combining (2.12a) and (2.12b) results in the quadratic expression
U2b (t) − Ub,ocUb(t) + Pb(t)Rb,i = 0. (2.18)
Solving the preceding equation gives the following expression for the battery ter-minal voltage
Ub(t) =Ub,oc
2±
√U2b,oc
4− Pb(t)Rb,i , (2.19)
which, inserted into (2.17) yields
q(t) = −Ub,oc ±
√U2b,oc − 4Pb(t)Rb,i
7200Q0Rb,i, (2.20)
where Pb can be expressed, using the relations (2.1) and (2.2), as
Pb(t) = Pinv(t) − ηconvηeqPice(t) + Paux. (2.21)

2.5 Model Equation 15
The battery soc can thus be calculated by only knowing the hev power flow. IfPb(t) = 0 is inserted in (2.20) the change in the battery soc should be equal tozero. Thus, the correct solution is given by
q(t) = −Ub,oc −
√U2b,oc − 4Pb(t)Rb,i
7200Q0Rb,i. (2.22)
2.5 Model Equation
The non-linear state-space model of the hev, where the state derivatives dependon the current states and inputs, can be written as
x(t) = f(x(t),u(t)), (2.23a)
y(t) = h(x(t),u(t)). (2.23b)
The state vector x(t) and input vector u(t) are defined as
x(t) ,
s(t)v(t)Pice(t)q(t)
, u(t) ,
Ft(t)Fmb(t)P ∗ice(t)
. (2.24)
Equation (2.10), (2.11), (2.22) and (2.21) can be written on the same form as(2.23a) resulting in
x(t) =
s(t)v(t)Pice(t)q(t)
=
v(t)Ft(t)m − Fmb(t)
m − r2v(t)2+r1v(t)+r0m
P ∗ice(t)−Pice(t)Tice
−Ub,oc−
√U2b,oc−4(Pinv (t)−ηconvηeqPice(t)+Paux)Rb,i
7200Q0Rb,i
. (2.25)
Note that Pinv(t) is determined by whether the train is powering or braking ac-cording to (2.3). This equation is valid in the special case of zero track curvatureand track gradient.
The values of the parameters used in the hevmodel are found in Table 2.2.

16 2 Series Hybrid Electric Railway Vehicle Modelling
Table 2.2: Values of the parameters used in the hevmodel.
Notation Value Description
m 43560 kg Equivalent mass of the hev.r2 3.56 Ns2/m2 Running resistance polynomial coeffi-
cient.r1 20.3 Ns/m Running resistance polynomial coeffi-
cient.r0 554.9 N Running resistance polynomial coeffi-
cient.ηeg 0.90 Electric generator efficiency.ηconv 0.95 Converter efficiency.ηinv 0.95 Inverter efficiency.ηem 0.90 Electric motor efficiency.ηgb 0.98 Gear-box efficiency.Paux 30 kW Auxiliary power supply.Tice 1 s ice time constant.P ∗ice,of f 0 kW Off ice output power reference.P ∗ice,low 200 kW Low ice output power reference..P ∗ice,opt 280 kW Optimum ice output power reference.P ∗ice,max 330 kW Maximum ice output power reference.Ub,oc 692 V Battery open circuit voltage.Rb,i 33.6 mΩ Battery internal resistance.Q0 22 Ah Battery nominal capacity.

3Controller Design
Thehevmodel, derived in Chapter 2, is used in thempc that has been developed.Firstly, this chapter gives a short introduction and explains the fundamental prin-ciples of mpc. The mpc basics will serve as a prerequisite to hybrid mpc. A hy-brid mpc can be seen as a framework that covers the use of both continuous anddiscrete variables. This allows one to model discrete valued input signals andsystem logic. One of the possible uses of the hybrid mpc framework is to approx-imate the non-linear train model by a number pwa models instead. Since bothcontinuous and discrete variables are used, the hybrid mpc optimisation prob-lem results in what is known as a miqp problem. This is a far more challengingoptimisation problem compared to a standard qp problem. The theory presentedin this chapter is mainly based on [5], [11] and [3].
3.1 MPC Basics
In the past, mpc has mainly been applied to systems with large time constantsdue the computational effort that is needed. With the rapid development of thecomputational capabilities of computers, mpc has gained significant popularityeven for systems with small time constants. Another contributing factor whympc is widely accepted in the industry is because the concept of mpc is simpleand easy to understand. One of the major advantages of mpc, compared to othercontrol methods, is that it can explicitly consider input, state and safety limitconstraints. This will not only keep the inputs and states within the given con-straints, assuming an accurate model, but it will allow the target system to safelyoperate near its physical and safety limits. Another advantage ofmpc is that bothSISO and MIMO systems are naturally handled the same way, which can ease the
17

18 3 Controller Design
control of large, more complex, systems.
When working with mpc it is favourable to work with linear discrete-time dy-namic models that describe the evolution of the plant as a function of the currentsystem state x and the manipulated input u according to
x(kTs + Ts) = Fx(kTs) + Gu(kTs) (3.1a)
y(kTs) = Cx(kTs) (3.1b)
z(kTs) = Mx(kTs) (3.1c)
where Ts is the sampling interval, y a vector of measured outputs and z a vectorof states to be controlled. If the model accurately describes the plant we wish tocontrol, the mpc can utilise the prediction power that the model holds.
The idea of mpc is to formulate the control problem as an optimisation problem,and to solve this on-line, to retrieve the optimal input sequence over a specifiednumber of time steps. The number of time steps is called the prediction horizonand is denoted N . The optimal input sequence, also called the optimiser, for agiven prediction horizon N is the one that minimises an objective function Vas
U ∗(x) , minU
V (x, U ) = [u∗0(x), u∗1(x), ..., u∗N−1(x)]. (3.2)
The objective function, or cost function, is a function of the current system statex and the input sequence U . The system states need to be measured or estimatedby the use of an observer. Knowing the current system state allows one to cal-culate the optimiser. The first element of the optimiser u∗0(x) is applied to theplant, resulting in a complex feedback controller. Due to disturbances and inac-curacies in the plant model the optimiser U ∗(x) has to be recalculated at everytime step.
The objective function needs to be designed based on the purpose of the con-troller and can generally be expressed as
V (x(k), U ) =N−1∑k=0
q(x(k), U ) + p(x(k + N )), (3.3)
where q(x(k), U (k)) denotes the stage cost and p(x(N )) denotes the terminal cost.The terminal cost is designed to guarantee stability. In mpc the objective func-tion is commonly expressed as a quadratic function subject to a set of linear con-straints. The reason for this is that it can easily be rewritten as a qp problem,which is a well known optimisation problem.
Concluding the details above, the basicmpc algorithm can be summarised as:
1. Measure the system states x(k) or estimate them by the help of an observer.
2. Calculate the optimal input sequence U ∗(x) that minimises a cost functionV (x, U ) by solving an optimisation problem on-line.
3. Implement the first element of the optimal input sequence u∗0(x).

3.2 Hybrid MPC 19
4. Update time k = k + 1.
5. Repeat procedure from Step 1.
3.2 Hybrid MPC
In many applications it is common that both linear and discrete dynamics arepresent. These systems are referred to as hybrid systems. The theory presentedin the previous section can be expanded to hybrid systems, resulting in a hybridmpc. A popular case of discrete-time hybrid systems is the pwa system. Insteadof working with a general non-linear internal model in the mpc, a pwa systemwill switch between several affine models depending on the location of the statevector. To model the discrete dynamics, binary variables are introduced. Whenbinary variables are introduced, the optimisation problem turns into a mixedinteger programming (mip) problem. This type of optimisation problem has acomplexity that grows exponentially with the number of introduced binary vari-ables. The hybrid mpc has been implemented in Matlab with the help of thefree optimisation modelling toolbox Yalmip [10].
3.2.1 Piecewise Affine Model
As mentioned above, an alternative to working with a non-linear internal modelin the mpc is to approximate it with several affine models instead. The logicof switching between the affine models, depending on the location of the statespace vector, can be realised by introducing binary variables in the model. Theaffine models are obtained by dividing the state and input space into multipleregions. Each region is associated with a certain affine model. Following thetheory presented in [3] the pwa, model can be expressed as
x(t + 1) =Ai(t)x(t) + Bi(t)u(t) (3.4a)
y(t) =C i(t)x(t) + D i(t)u(t) (3.4b)
H i(t)x(t) + J i(t)u(t) ≤ K i(t) (3.4c)
The matrices Ai(t), Bi(t), C i(t), D i(t), H i(t), J i(t) and K i(t) are constants. The variablei(t) denotes the current mode of the system and determines which affine modelthat is active at a certain time.
In this thesis the non-linear model (2.25) has been approximated by five affinemodels. These models are obtained by partitioning the input and state space intofive regions and linearising the non-linear model about a suitable point in eachregion. The points of linearisation are chosen as

20 3 Controller Design
x0,1 =
0
10/3.6280000
0
, x0,2 =
0
30/3.6280000
0
, x0,3 =
0
50/3.6280000
0
, x0,4 =
0
70/3.6280000
0
, x0,5 =
0
90/3.6280000
0
.(3.5)
The linearisation point for the distance s0 and battery soc q0 are both set to 0as they do not affect the linearised model. The maximum vehicle speed is 100km/h, thus the total speed range has been divided into five equally large regions.The linearisation point v0 has been chosen as the middle point of each respectiveregion. The linearisation point Pe,0 is set to 280 kW because it is the ice’s optimalpoint of operation and therefore also the desired operating point.
The affine models were acquired by first calculating the stationary points usingthe chosen points (3.5). Inserting x0 in (3.6) allows one to calculate u0. Knowingx0 and u0, the matrices A, B, C and D can be calculated. None of the chosenpoints (3.5) can actually be used to calculate a stationary point due to s = v.Therefore, s = v has been neglected and the standard procedure of calculatingstationary points has been used to calculate x0 and u0.
Following the theory regarding linearisation in [7], a non-linear system describedby (2.23) can be linearised about a stationary point x0, u0, y0 such that
f (x0, u0) = 0, y0 = h(x0, u0). (3.6)
The linear model is obtained by observing small deviations from the stationarypoint x = x0 + ∆x, u = u0 + ∆u and calculating the first order Taylor expansionabout this point. The Jacobians of f are given by
fx =
0 1 0 00 − 2r2v(t)+r1
m 0 00 0 − 1
Tice0
0 − Ft (t)
Q0√U2b,oc−4(Ft (t)v(t)−ηconvηeqPice (t)+Paux )Rb,i
ηconvηeq
Q0√U2b,oc−4(Ft (t)v(t)−ηconvηeqPice (t)+Paux )Rb,i
0
,
fu =
0 0 01m − 1
m 00 0 1
Tice
− v(t)
Q0√U2b,oc−4(Ft (t)v(t)−ηconvηeqPice (t)+Paux )Rb,i
0 0
,hx = I,hu = 0.
(3.7)With the notation A = fx(x0, u0), B = fu(x0, u0), C = hx(x0, u0) and D = hu(x0, u0)the linearised model can be written as
x(t) = ∆x(t) = A∆x(t) + B∆u(t),
∆y(t) = C∆x(t) + D∆u(t).(3.8)

3.2 Hybrid MPC 21
The linearised model is a continuous-time system. Sampling the continuous-timesystem (3.8) with a sampling time of Ts and approximating the time derivative,using Euler forward, yields the discrete time model
x(kTs + Ts) − x(kTs)Ts
= A∆x(kTs) + B∆u(kTs),
∆y(t) = C∆x(t) + D∆u(t),(3.9)
which can be rewritten as
x(kTs + Ts) = (I + TsA)∆x(kTs) + TsB∆u(kTs),
∆y(t) = C∆x(t) + D∆u(t).(3.10)
The discrete time models are used in the hybrid mpc implementation.
3.2.2 Mixed-Integer Programming
To model the logic of switching between multiple affine models, binary variablesare introduced. An optimisation problem containing both continuous and dis-crete variables is known as a mip problem. The discrete variables are included inthe mip model through integrality constraints. mip problems can be more finelycategorised. In the case of a quadratic objective function and linear constraintsthe optimisation problem is known as a miqp problem. When solving a miqpproblem a number of different solvers are available e.g. Gurobi, Mosek andCplex. In this thesis, Gurobi has been used to solve the miqp problem [8]. Amiqp problem can be formulated as
minx
12xTHx + f T x (3.11a)
subject to Aeqx = beq (3.11b)
Ax ≤ b (3.11c)
xi ∈ Z i = 1, ..., n. (3.11d)
Note that for the special case of n = 0 we end up with a qp problem.
The first step of solving amiqp problem is to enlarge the feasible set. This is doneby relaxing the constraints, e.g. ignoring all integrality constraints. The relaxationof the original miqp can then be used to calculate a lower bound to the optimalsolution. If the result happens to fulfil all the integrality constraints the optimalsolution has been found. This is however unlikely to occur, thus the relaxedproblem needs to be refined or tightened. This is typically done using a branchand bound method where each node contains aqp problem. The number of nodesin the branch and bound tree grows exponentially with the number of binaryvariables 2n. Solving miqp problems can therefore become very computationalheavy as the worst case would result in having to solve 2n qp problems. This isof course not reasonable in the case of real time applications. Therefore themiqp

22 3 Controller Design
solvers use various methods of reducing the computational complexity. Furtherdetails about branch and bound and how miqp problems can be solved can befound in [1] and [2].
3.2.3 Objective Function
As mentioned in Section 3.1 the idea of mpc is to formulate the control problemas an optimisation problem and calculate the optimiser that minimises the objec-tive function, subject to a set of constraints. The states we want to control and thereference tracking signals are defined by z(k) and r(k), respectively. The designof the objective function is determined by how we want the hev to behave. Theobjective function used in the hybrid mpc can be written as
V (x(k), U ) =N−1∑j=0
‖z(k + j) − r(k + j)‖2Q1+ Q2Ft(k + j) + Q3Fmb(k + j)
+ Q4ηice(P∗ice(k + j)). (3.12)
In the operation of trains it is of utter importance that time tables are kept andspeed limits along the track are followed. Therefore the objective function in-cludes reference tracking of a given speed profile. The reference tracking is in-cluded as a quadratic term since we want to avoid running faster or slower thanthe desired speed.
One of the major advantages of series hybrid systems is the possibility of runningthe ice at its optimal efficiency. The ice efficiency is denoted ηice in (3.12) anddepends on Pice. Running the ice at the optimal efficiency will not only minimiseengine loss, but also the total fuel consumption over time. The ice efficiencyis included in the objective function to minimise the engine loss and total fuelconsumption.
The use of the mechanical break Fmb will cause energy loss in terms of heat dissi-pated in the breaks. The mechanical brake force Fmb is included in the objectivefunction to make sure that it is only used when the required deceleration can notbe achieved solely using regenerative braking.
After designing the objective function one has to tune the length of the predictionhorizon N , as well as the weights Q1, Q2, Q3 and Q4. The prediction horizonshould typically be long enough to cover the settling time of the slower dynamicsof the target system. However, due to limitations in the computational power ofthe used simulation platform the prediction horizon has been limited to N ≤ 40.The objective function weights are tuned by the user and will determine howthe mpc will prioritise the minimisation of the various terms in the objectivefunction.

3.2 Hybrid MPC 23
3.2.4 Constraints
In Section 3.1 it is mentioned that one of the major advantages of mpc is thatconstraints can be explicitly included when setting up the control problem. In ahybridmpc amiqp problem has to be solved at every time step. When setting upan miqp problem all states and inputs are required to be explicitly bounded inorder for Yalmip to be able to perform Big-M reformulations. To understand themeaning of Big-M reformulations the interested reader is referred to [10]. Theconstraints used in the hybrid mpc can be stated explicitly as
minU
V (x(k), U ) (3.13a)
subject to x(k + 1) = Aix(k) + Biu(k) (3.13b)
i ∈ 1, 2, 3, 4, 5 (3.13c)
smin ≤ s ≤ smax (3.13d)
vmin ≤ v ≤ vmax (3.13e)
Pice,min ≤ Pice ≤ Pice,max (3.13f)
qmin(s) ≤ q ≤ qmax (3.13g)
Ft,min(v) ≤ Ft ≤ Ft,max(v) (3.13h)
Fmb,min(v) ≤ Fmb ≤ Fmb,max(v) (3.13i)
Pb,min(v) ≤ Pb ≤ Pb,max(v) (3.13j)
P ∗ice ∈ P∗ice,of f , P
∗ice,low, P
∗ice,opt , P
∗ice,max (3.13k)
As stated in (3.11), the miqp problem only allows linear inequality, equality andintegrality constraints. Therefore, non-linear constraints need to be linearised.The discrete valued variables and the logic in the switching of affine models needto be modelled as well.
In this thesis, five affine models are used to approximate the non-linear hevmodel. The constraint (3.13b) calculates the predicted future state using one ofthese linearised discrete-time models. The active model is given by the value ofi, which is determined by the vehicle speed. To implement the logic of switchingbetween the pwa models, five binary decision variables are introduced, denoteddi,j , j = 1, ..., 5. To ensure that only one model is active, a constraint is set on thedecision variables
i = 1 · di,1 + 2 · di,2 + 3 · di,3 + 4 · di,4 + 5 · di,5, (3.14a)5∑j=1
di,j = 1. (3.14b)
To give an example, di,1 = 1 implies that A1 and B1 are active and used to calcu-late x(k + 1).

24 3 Controller Design
In a similar way the constraint (3.13k) can be realised by introducing the decisionvariable dice,j , j = 1, ..., 4 and assigning P ∗ice as
P ∗ice = P ∗ice,of f dice,1 + P ∗ice,lowdice,2 + P ∗ice,optdice,3 + P ∗ice,maxdice,4, (3.15a)
4∑j=1
dice,j = 1. (3.15b)
Constraint (3.13h) and (3.13i) depend on the vehicle speed and vary non-linearly.The tractive, regenerative brake and mechanical brake force curves, shown inFigure 2.3, are linearised for five equally large vehicle speed regions, see Fig-ure 3.1.
The battery power constraint (3.13j) has to be linearised due to the inclusionof the non-linear term Pout(t) = Ft(t)v(t), in (2.21). Similarly to the previousconstraint linearisation, the vehicle output is approximated for five equally largevehicle speed regions as shown in Figure 3.2. The linearisation of the batterypower constraint is done by replacing the non-linear vehicle output term througha Taylor expansion
Ft(t)v(t) = Ft,0v0 + Ft,0(v(t) − v0) + v0(Ft(t) − Ft,0), (3.16)
and linearising about one point in each region. The points of linearisation arechosen as Ft,0 = 0 for all five points and v0 = 10
3.6 ,303.6 ,
503.6 ,
703.6 ,
903.6 .
0 10 20 30 40 50 60 70 80 90 100
v [km/h]
-30
-20
-10
0
10
20
30
40
[kN
]
Ft,max
Ft,min
Fmb
(a) Ft and Fmb curves.
0 10 20 30 40 50 60 70 80 90 100
v [km/h]
-30
-20
-10
0
10
20
30
40
[kN
]
Ft,max
Ft,min
Fmb
(b) Linearised Ft and Fmb curves.
Figure 3.1: Linearisation of the tractive, regenerative brake and mechanicalbrake force curves.

3.2 Hybrid MPC 25
40
-500
100
0
20
Pout [kW
]
80
500
Ft [kN]
0 60
v [km/h]
1000
40-20
20
0
-600
-400
-200
0
200
400
600
800
(a) Pout .
40
-500
100
0
20
Pout [kW
]
80
500
Ft [kN]
0 60
v [km/h]
1000
40-20
20
0
-600
-400
-200
0
200
400
600
800
(b) Linearised Pout .
Figure 3.2: Linearisation of Pout used to approximate the non-linear con-straint on the battery power Pb, with linear constraints.
The vehicle speed regions used in the linearised constraints above are chosen tobe the same as the regions used for determining the active pwa model. Thus,the speed of the vehicle will not only determine the active pwa model, but alsowhich linearised constraints that are active.
An important concept in the energy management in hevs is that the sum of thevehicle’s kinetic energy and the energy of the storage battery should be kept con-stant. This concept implies that if the initial battery soc is q0, the soc shouldreturn to its initial value when the train is approaching its destination. Due to thelength of the mpc prediction horizon being limited, this becomes a challengingtask. In this thesis an attempt to solve the problem has been done by introducinga lower bound constraint on the soc of the battery (3.13g), that depends on thedistance travelled by the vehicle according to
qmin +s(k)stot
(q0 − qmin) ≤ q(k) ≤ qmax, (3.17)
where stot denotes the total distance between the origin and the destination.
3.2.5 Softened Constraints
One of the issues that can arise in anmpc controller is that the optimisation prob-lem becomes infeasible due to a constraint violation. This can occur when thempc is operating close to a constraint and a large disturbance affects the system.Another example is if the internal model differs from the plant model.
Infeasibility is of course an unacceptable behaviour by the mpc when operatingon-line. There are a number of different measures that can be taken if infeasi-bility occurs. In this thesis the control signals will use the same values as in

26 3 Controller Design
the previous time step if infeasibility occurs. More advanced measures could betaken, such as increasing the feasible set by relaxing less important constraintsand recalculating the optimisation problem.
One strategy to avoid infeasibility is to soften some of the hard constraints [11].This means that instead of observing hard constraints as boundaries, that cannever be crossed, we allow a small violation if necessary. However, not all con-straints are possible to relax. Input constraints are often hard constraints thatcannot be violated. State constraints are many times user-defined and can there-fore be relaxed. Relaxing constraints can be done by introducing slack variables.If we consider a standard qp problem, the slack variable can be added to theobjective function and the linear constraints as
minx,ε
12xTHx + f T x + ρ‖ε‖1 (3.18a)
Ax ≤ b + ε (3.18b)
ε ≥ 0 (3.18c)
The slack variable ε has the same dimension as b and is non-negative. By set-ting the weight ρ we can decide to what degree the constraint should be relaxed,where ρ = 0 corresponds to a completely unconstrained problem and ρ → ∞ tothe original problem with a hard constraint.
In this thesis a slack variable was introduced to soften the battery soc constraint.The hard constraints are not set because of physical limitations of the battery, butrather to keep the soc within a desired range to promote the battery efficiencyand longevity.
3.2.6 Move-Blocking
One of the challenges of solving miqp problems within the sampling time of thempc is the computational complexity, which grows exponentially with the num-ber of binary optimisation variables used. Thus, using a long prediction hori-zon will have a significant impact on the computation time. Different strategiescan be used to reduce the computational effort. One possibility is to introducemove-blocking. In this thesis the simple move-blocking scheme input blocking hasbeen implemented. This strategy decreases the degrees of freedom in the optimi-sation problem by fixing certain input signals to be constant over several time-steps [4]. This is done by restating the original optimisation problem to optimiseU = [uT0 · · · u
TM−1]T instead of U = [uT0 · · · u
TN−1]T , where M < N . By introduc-
ing the blocking matrix T ∈ RN×M the relation between U and U can be written
as
U = [uT0 · · · uTN−1]T = (T ⊗ Im)[uT0 · · · u
TM−1]T , (3.19)

3.2 Hybrid MPC 27
where ⊗ is the Kronecker product, m is the number of input signals and Im is anidentity matrix with m rows. As an example we can assume a prediction horizonN = 4, input blocking u0 = u1 and u2 = u3 and the optimisation variables U =[uT0 u
T1 ]T . This gives the blocking matrix
T =
1 01 00 10 1
. (3.20)
Depending on the choice of M a blocking matrix T can be defined. The blockingmatrix can then be used to reformulate the original optimisation problem andreduce the degrees of freedom. In this thesis, input blocking has only been usedfor the input signal P ∗ice because it is a discrete variable.


4Results
The performance of the hybrid mpc, described in Chapter 3, is evaluated usingsoftware simulations. Before describing the simulator implementation, a briefpresentation of the heuristic ems which is currently being used in Ki-Ha E200,and the design of three different test cases are presented. Finally, this chap-ter presents the simulation results followed by a discussion of the obtained re-sults.
4.1 Heuristic Controller
The heuristic ems implementation is based on the principle that the sum of thekinetic energy of the railway vehicle and the energy stored in the storage batteryshould be kept constant. If this principle is strictly followed it implies that theinitial and final value of the soc of the storage battery are equal. The outputpower reference P ∗ice is determined by whether the train is powering, coasting orbraking, and by the vehicle speed and the battery soc. Figure 4.1 shows how thevehicle speed and battery soc space is divided into five regions.
29

30 4 Results
0 10 20 30 40 50 60 70 80 90 100
v [km/h]
0
10
20
30
40
50
60
70
80
90
100
SoC
[%
]
A
B
C
D
E
Figure 4.1: The battery soc and vehicle speed space is divided into five re-gions. The regions are denoted A, B, C, D and E. The active mode is used inthe heuristic ems to determine the operation of the ice.
It can be seen that an upper and lower limit has been set for the battery soc.These limits are set to ensure that the battery is operating at a high efficiency andto ensure the longevity of the battery. Within the upper and lower limit thereare five different regions denoted mode A, B, C, D and E. Knowing the mode, i.e.the vehicle speed and soc of the battery, and train operation, P ∗ice is determinedaccording to Table 4.1.
Table 4.1: The ice output power reference P ∗ice is determined by the modeand whether the hev is powering, coasting or braking. E.g. if the hev is inmode E and braking, P ∗ice should be set to P ∗ice,low.
Mode Powering Coasting Braking
A OFF OFF OFFB OPT OFF OFFC MAX MAX LOWD OFF OFF OFFE MAX MAX LOW
The ideal case is to operate the train in mode A and B as one wants to avoidrunning the ice at low or maximum.
The heuristic ems suffers from rapid switching between modes when operatingnear region borders. To avoid this a hysteresis loop is implemented. An exampleof how the rapid switching between mode A and E can be eliminated using a

4.2 Test Cases 31
Figure 4.2: Hysteresis loop used to avoid rapid switching between modes.The figure shows an example of how this is avoided at the boundary betweenmode A and E. The upper and lower soc limits that triggers the change ofmode are set to 0.55 and 0.45, respectively.
hysteresis loop is shown in Figure 4.2. The soc limits that trigger a change inmode need to be tuned to obtain acceptable performance.
4.2 Test Cases
In order to evaluate and compare the performance of the heuristic ems and thehybrid mpc, three test cases with different speed reference patterns have beendesigned, see Figure 4.3. The test cases are not based on actual running data. Thedesigned test cases include sections of powering, coasting and braking similarto real train operation. Constant acceleration and deceleration has been usedfor powering and braking. All test cases assume zero track curvature and trackgradient. Test case 1 and 2 are designed to examine how the length of the trackaffects the performance of the controllers. Test case 3 is designed to investigatethe effect of speed limitations along the track.
The total travel time and total distance travelled of the three test cases are sum-
0 50 100 150 200 250
Time [s]
0
10
20
30
40
50
60
70
80
vre
f [km
/h]
(a) Test case 1
0 100 200 300 400 500 600 700
Time [s]
0
10
20
30
40
50
60
70
80
vre
f [km
/h]
(b) Test case 2
0 100 200 300 400 500
Time [s]
0
10
20
30
40
50
60
70
80
vre
f [km
/h]
(c) Test case 3
Figure 4.3: Three test cases, with different speed reference patterns, used toevaluate and compare the performance of the hybrid mpc and the heuristicems.

32 4 Results
marised in Table 4.2. These values are used to determine how much the totaltravelled distance and total time of the hybrid mpc result deviates from that ofthe heuristic ems.
Table 4.2: Total travel time and distance travelled for the three test casesused in the controller evaluation.
Test Case t [s] s [m]
1 254 42302 733 137153 555 8286
4.3 Simulator
The simulator is implemented using Matlab and Simulink. The top level viewof the simulator in Simulink is shown in Figure 4.4. The Controller block canbe set to use either the heuristic ems or the hybrid mpc. The chosen controllerwill calculate the control signal u(k) based on the input r(k), ..., r(k + N ) and thestate x(k). The Reference block outputs the future reference values for the vehiclespeed. If the heuristic ems is the active controller the first value of the sequencer(k), ..., r(k +N ) will be used as the actual vehicle speed. The HEV block containsthe non-linear model (2.25) and takes the control signals u(k) and calculates thesystem states x(k).
4.4 Simulation Results
In this section the simulation results for the heuristic ems and the hybridmpc arepresented for three different test cases. Each test case has been simulated usingthree different values for the initial soc of the battery. The objective functionweights, slack variable weight, prediction horizon and input blocking settingsused in the hybrid mpc are summarised in Table 4.3.
Figure 4.4: Top level view of the simulator in Simulink.

4.4 Simulation Results 33
Table 4.3: Values of the hybrid mpc tuning parameters used in the simula-tion.
Tuning Parameter Value
Q1 100000Q2 0Q3 0.001Q4 500ρ 80000N 40M 5
The sample time of the hybridmpc is set to 1 second. However, the control signalP ∗ice is only updated every five seconds. This is assumed to be a requirementof the controller in order to avoid the ice from rapidly switching on and off,similar to the effect of the hysteresis loop used in the heuristic ems. To givean overview, and a basis for the analysis of the performance of the two studiedcontrollers, simulation data has been collected and is summarised in Table 4.4.In order to allow a qualitative comparison of the acquired results, ∆q has to beconverted into a fuel equivalentmf ,∆q. This is done by calculating how much fuelis required, if the engine is operating at its optimum point, to obtain the amountof energy that yields ∆q. The fuel equivalent can be calculated as
mf ,∆q =
∫ tt0Pb,MP C(t) − Pb,H (t)dt
1000 · 3600 · ηconvηeg·
201.891000
. (4.1)
The fuel equivalent is used to calculate the percentage reduction or increase infuel consumption.
To further support the analysis of the acquired results, the collected data fromthree different test scenarios are shown in Figures 4.5-4.10. The presented testcase scenarios are Test case 1 with an initial soc of 30%, Test case 2 with aninitial soc of 50% and Test case 3 with an initial soc of 70%. For each scenariothe results from both the heuristic ems and hybrid mpc are given.

34 4 Results
Table
4.4:
Sum
mar
ised
dat
afr
omth
esi
mu
lati
onre
sult
sof
the
heu
rist
ican
dth
ehy
bridmpc
cont
roll
er.
Inth
eta
ble,q 0
give
sth
ein
itia
lba
tter
ysoc
,q
the
fina
lva
lue
ofth
eba
tter
ysoc
andmf
the
tota
lam
ount
offu
elco
nsu
med
whe
nth
ehev
has
reac
hed
its
des
tina
tion
and
com
eto
aco
mp
lete
stop
.T
hed
iffer
ence
insoc
and
fuel
cons
um
pti
on,
betw
een
the
heu
rist
icems
and
the
hybr
idmpc
for
asp
ecifi
cte
stca
se,i
sd
enot
ed∆q
and∆mf
,res
pec
tive
ly.
The
fuel
equ
ival
ent
mf,∆q
mak
esit
pos
sibl
eto
calc
ula
teth
ere
duct
ion
inth
eto
talf
uel
cons
um
pti
oneq
uiv
alen
t.T
here
duct
ion
colu
mn
stat
esho
wm
any
per
cent
the
hybr
idmpc
has
incr
ease
d(p
osit
ive)
ord
ecre
ased
(neg
ativ
e)th
eto
talf
uel
cons
um
pti
oneq
uiv
alen
t,co
mp
ared
toth
ehe
uri
sticems.
The
diff
eren
cein
arri
val
tim
ean
dth
eto
tal
dis
tanc
etr
avel
led
isgi
ven
by∆t
and∆s,
resp
ecti
vely
.A
pos
itiv
eva
lue
corr
esp
ond
sto
thehev
trav
elli
ngfo
ra
long
erti
me
ora
long
erd
ista
nce,
whe
nu
sing
the
hybr
idmpc
,com
par
edto
the
test
case
spec
ifica
tion
give
nin
Tabl
e4.
2.
Heu
rist
icH
ybri
dmpc
Test
Cas
eq 0
[%]
q[%
]mf
[kg]
q[%
]mf
[kg]
∆q
[%]
∆mf
[kg]
mf,∆q
[kg]
Red
uct
ion
[%]
∆t
[s]
∆s
[m]
130
42.3
42.
001
37.9
11.
806
-4.4
3-0
.195
0.14
8-2
.32
0-7
5050
.92
1.55
755
.45
1.72
74.
530.
171
0.18
6-0
.87
0-7
7066
.93
1.39
873
.11
1.64
96.
180.
251
0.25
4-0
.19
0-7
230
41.2
84.
728
38.9
14.
554
-2.3
6-0
.174
0.05
2-2
.59
0-4
5040
.01
3.90
758
.47
4.55
418
.46
0.64
70.
721
-1.6
00
-470
48.3
13.
429
76.9
04.
554
28.5
91.
125
1.10
30.
480
3
330
36.4
82.
856
32.2
72.
669
-4.2
1-0
.187
0.13
6-1
.70
0-8
5032
.89
1.93
751
.29
2.66
918
.40
0.73
20.
708
0.92
0-8
7052
.89
1.93
771
.02
2.66
918
.13
0.73
20.
706
0.99
0-9

4.4 Simulation Results 35
0 50 100 150 200 250
t [s]
0
500
1000
1500
2000
2500
3000
3500
4000
4500
s [
m]
Position
position
(a) s(t)
0 50 100 150 200 250
t [s]
0
10
20
30
40
50
60
70
80
v [
km
/h]
Speed
simulated speed
(b) v(t)
0 50 100 150 200 250
t [s]
-30
-20
-10
0
10
20
30
40
Ft [
kN
]
Tractive Force
tractive force
(c) Ft(t)
0 50 100 150 200 250
t [s]
0
2
4
6
8
10
12
Fm
b [kN
]
Mechanical Break Force
mechanical break force
(d) Fmb(t)
0 50 100 150 200 250
t [s]
-350
-300
-250
-200
-150
-100
-50
0
50
Pb [
kW
]
Battery Power
battery power
(e) Pb(t)
0 50 100 150 200 250
t [s]
0.24
0.26
0.28
0.3
0.32
0.34
0.36
0.38
0.4
0.42
0.44
q [
-]
SoC
SoC
(f) q(t)
0 50 100 150 200 250
t [s]
0
50
100
150
200
250
300
350
Pic
e*
[kN
]
Engine Power
engine power
(g) P ∗ice(t)
0 50 100 150 200 250
t [s]
0
0.5
1
1.5
2
2.5
mf [
kg]
Fuel Consumption
fuel mass
(h) mice,f (t)
Figure 4.5: Simulation results using the heuristic soc-based energy manage-ment controller, for Test case 1, with initial soc q0 = 0.3.

36 4 Results
0 50 100 150 200 250
t [s]
0
500
1000
1500
2000
2500
3000
3500
4000
4500
s [
m]
Position
position
(a) s(t)
0 50 100 150 200 250
t [s]
0
10
20
30
40
50
60
70
80
v [
km
/h]
Speed
reference speed
simulated speed
(b) v(t)
0 50 100 150 200 250
t [s]
-30
-20
-10
0
10
20
30
40
Ft [
kN
]
Tractive Force
tractive force
(c) Ft(t)
0 50 100 150 200 250
t [s]
0
2
4
6
8
10
12
Fm
b [kN
]
Mechanical Break Force
mechanical break force
(d) Fmb(t)
0 50 100 150 200 250
t [s]
-300
-200
-100
0
100
200
300
Pb [
kW
]
Battery Power
battery power
(e) Pb(t)
0 50 100 150 200 250
t [s]
0.2
0.22
0.24
0.26
0.28
0.3
0.32
0.34
0.36
0.38
0.4
q [
-]
SoC
SoC
(f) q(t)
0 50 100 150 200 250
t [s]
0
50
100
150
200
250
300
Pic
e*
[kN
]
Engine Power
engine power
(g) P ∗ice(t)
0 50 100 150 200 250
t [s]
0
0.2
0.4
0.6
0.8
1
1.2
1.4
1.6
1.8
2
mf [
kg]
Fuel Consumption
fuel mass
(h) mice,f (t)
Figure 4.6: Simulation results using a hybrid mpc controller, for Test case 1,with initial soc q0 = 0.3.

4.4 Simulation Results 37
0 100 200 300 400 500 600 700
t [s]
0
2000
4000
6000
8000
10000
12000
14000
s [
m]
Position
position
(a) s(t)
0 100 200 300 400 500 600 700
t [s]
0
10
20
30
40
50
60
70
80
v [km
/h]
Speed
simulated speed
(b) v(t)
0 100 200 300 400 500 600 700
t [s]
-30
-20
-10
0
10
20
30
40
Ft [
kN
]
Tractive Force
tractive force
(c) Ft(t)
0 100 200 300 400 500 600 700
t [s]
0
2
4
6
8
10
12
Fm
b [kN
]
Mechanical Break Force
mechanical break force
(d) Fmb(t)
0 100 200 300 400 500 600 700
t [s]
-400
-300
-200
-100
0
100
200
300
Pb [kW
]
Battery Power
battery power
(e) Pb(t)
0 100 200 300 400 500 600 700
t [s]
0.2
0.25
0.3
0.35
0.4
0.45
0.5
q [
-]
SoC
SoC
(f) q(t)
0 100 200 300 400 500 600 700
t [s]
0
50
100
150
200
250
300
350
Pic
e*
[kN
]
Engine Power
engine power
(g) P ∗ice(t)
0 100 200 300 400 500 600 700
t [s]
0
0.5
1
1.5
2
2.5
3
3.5
4
mf [
kg
]
Fuel Consumption
fuel mass
(h) mice,f (t)
Figure 4.7: Simulation results using the heuristic soc-based energy manage-ment controller, for Test case 2, with initial soc q0 = 0.5.

38 4 Results
0 100 200 300 400 500 600 700
t [s]
0
2000
4000
6000
8000
10000
12000
14000s [
m]
Position
position
(a) s(t)
0 100 200 300 400 500 600 700
t [s]
0
10
20
30
40
50
60
70
80
v [km
/h]
Speed
reference speed
simulated speed
(b) v(t)
0 100 200 300 400 500 600 700
t [s]
-30
-20
-10
0
10
20
30
40
Ft [
kN
]
Tractive Force
tractive force
(c) Ft(t)
0 100 200 300 400 500 600 700
t [s]
0
1
2
3
4
5
6
7
8
9
10
Fm
b [kN
]
Mechanical Break Force
mechanical break force
(d) Fmb(t)
0 100 200 300 400 500 600 700
t [s]
-300
-200
-100
0
100
200
300
Pb [kW
]
Battery Power
battery power
(e) Pb(t)
0 100 200 300 400 500 600 700
t [s]
0.2
0.25
0.3
0.35
0.4
0.45
0.5
0.55
0.6
q [
-]
SoC
SoC
(f) q(t)
0 100 200 300 400 500 600 700
t [s]
0
50
100
150
200
250
300
Pic
e*
[kN
]
Engine Power
engine power
(g) P ∗ice(t)
0 100 200 300 400 500 600 700
t [s]
0
0.5
1
1.5
2
2.5
3
3.5
4
4.5
5
mf [
kg
]
Fuel Consumption
fuel mass
(h) mice,f (t)
Figure 4.8: Simulation results using a hybrid mpc controller, for Test case 2,with initial soc q0 = 0.5.

4.4 Simulation Results 39
0 100 200 300 400 500
t [s]
0
1000
2000
3000
4000
5000
6000
7000
8000
9000
s [m
]
Position
position
(a) s(t)
0 100 200 300 400 500
t [s]
0
10
20
30
40
50
60
70
80
v [km
/h]
Speed
simulated speed
(b) v(t)
0 100 200 300 400 500
t [s]
-30
-20
-10
0
10
20
30
40
Ft [
kN
]
Tractive Force
tractive force
(c) Ft(t)
0 100 200 300 400 500
t [s]
0
2
4
6
8
10
12
Fm
b [kN
]
Mechanical Break Force
mechanical break force
(d) Fmb(t)
0 100 200 300 400 500
t [s]
-300
-200
-100
0
100
200
300
Pb [kW
]
Battery Power
battery power
(e) Pb(t)
0 100 200 300 400 500
t [s]
0.45
0.5
0.55
0.6
0.65
0.7
q [
-]
SoC
SoC
(f) q(t)
0 100 200 300 400 500
t [s]
0
50
100
150
200
250
300
Pic
e*
[kN
]
Engine Power
engine power
(g) P ∗ice(t)
0 100 200 300 400 500
t [s]
0
0.2
0.4
0.6
0.8
1
1.2
1.4
1.6
1.8
2
mf [
kg
]
Fuel Consumption
fuel mass
(h) mice,f (t)
Figure 4.9: Simulation results using the heuristic soc-based energy manage-ment controller, for Test case 3, with initial soc q0 = 0.7.

40 4 Results
0 100 200 300 400 500
t [s]
0
1000
2000
3000
4000
5000
6000
7000
8000
9000
s [m
]
Position
position
(a) s(t)
0 100 200 300 400 500
t [s]
0
10
20
30
40
50
60
70
80
v [km
/h]
Speed
reference speed
simulated speed
(b) v(t)
0 100 200 300 400 500
t [s]
-30
-20
-10
0
10
20
30
40
Ft [
kN
]
Tractive Force
tractive force
(c) Ft(t)
0 100 200 300 400 500
t [s]
0
2
4
6
8
10
12
Fm
b [kN
]
Mechanical Break Force
mechanical break force
(d) Fmb(t)
0 100 200 300 400 500
t [s]
-300
-200
-100
0
100
200
300
Pb [kW
]
Battery Power
battery power
(e) Pb(t)
0 100 200 300 400 500
t [s]
0.3
0.35
0.4
0.45
0.5
0.55
0.6
0.65
0.7
0.75
q [
-]
SoC
SoC
(f) q(t)
0 100 200 300 400 500
t [s]
0
50
100
150
200
250
300
Pic
e*
[kN
]
Engine Power
engine power
(g) P ∗ice(t)
0 100 200 300 400 500
t [s]
0
0.5
1
1.5
2
2.5
3
mf [
kg
]
Fuel Consumption
fuel mass
(h) mice,f (t)
Figure 4.10: Simulation results using a hybrid mpc controller, for Test case3, with initial soc q0 = 0.7.

4.5 Discussion 41
4.5 Discussion
The results that are presented in the previous section will mainly be analysedfrom three different viewpoints. The overall goal is to reduce the total fuel con-sumption of the Ki-Ha E200. However, in the case of an hev the analysis can notsimply focus on the total fuel consumption, but needs to include the operationof the ice and the use of the storage battery. As mentioned in Section 2.1 oneof the benefits of a hybrid system is that the ice can be operated at its optimalefficiency as it does not directly propel the vehicle. Another advantage is that thetrain can recuperate energy through regenerative braking, which can be storedin the storage battery. Therefore, before analysing the quantitative results, pre-sented in Table 4.4, the operation of the ice and soc control will be analysedthrough observations of Figures 4.5-4.10.
To understand the effect that the operation of the ice has on the fuel consumption,a comparison of the efficiency values given in Table 2.1 can be done as
220.25 − 201.89220.25
≈ 0.0834,
216.13 − 201.89216.13
≈ 0.0659.(4.2)
From the calculations in (4.2) we obtain that running the ice at optimal efficiency,compared to running it at low or maximum efficiency, will result in a fuel reduc-tion of 8.34% and 6.59%, respectively. The ice operation is easily analysed byobserving Figures 4.5-4.10. It can be seen that the hybrid mpc runs the ice atits optimal efficiency or turned off for all test cases. Unlike the hybrid mpc, theheuristic ems also runs the ice at low or maximum at some points. It is there-fore reasonable to expect that the fuel reduction will, at best, only be a few per-cent.
One of the drawbacks of the heuristic ems is its inability to control the finalvalue of the soc of the storage battery. The deviation from the initial value variesgreatly for the different test cases. The case of the final soc being lower thanthe initial value is particularly troublesome. To reach the initial value of the soc,when arriving at a station, the ice would have to run to charge the battery. Thiswould increase noise levels and exhaust emissions inside train stations, whichis undesirable. The hybrid mpc partially solves this problem by ensuring thatthe soc is returned to a value equal to, or higher than, its initial value. Thisis done by adjusting the lower boundary value of the soc constraint such thatit varies with the position of the hev. This is not ideal but can be seen as anacceptable behaviour with regards to the short prediction horizon. One couldmake the soc return to its initial value, using a short prediction horizon, but thatcould possibly require the mechanical brake to be used instead of regenerativebraking. The energy would then be lost as heat is dissipated in the brakes insteadof recuperated and stored in the battery.
To understand the quantitative results, a few words need to be said about thedesign of the test cases and the control objective. The test cases are made up of

42 4 Results
sections of powering, coasting and braking. The powering and braking sectionsuse maximum acceleration and deceleration, respectively. This is unfavourable incase of the hybridmpc as the control signal constraints have been linearised. Theuse of the linearised constraints will increase the feasible set in the optimisationproblem, making it possible for the hybrid mpc to output control signals thatviolate the physical limitations of the hev. To avoid this issue, the control signalsfrom the hybrid mpc are saturated. This could result in the use of non-optimalcontrol signals, which will result in worse performance.
With regards to how the control objective has been set up to follow a certainspeed profile, rather than reaching a certain position within a given time, it ismainly the design of the speed pattern that will determine the efficiency of howthe train is operated, rather than the hybrid mpc. Depending on how the hybridmpc follows the speed profile the performance will be slightly better or worsethan that of the heuristic ems.
In order for the comparison of the quantitative results to be fair it is importantthat the run-time and travelled distance for a specific test case do not vary toomuch for the two controllers. From Table 4.4 it can be seen that ∆t is equal tozero for all test cases, meaning that the train stops at the same time for both con-trollers. The deviation in the train’s position is denoted ∆s and is at most 9 meters,which is small enough to be considered acceptable. To obtain a quantitative valuethat can be used to compare the fuel consumption of the two controllers, ∆q hasbeen converted into a fuel equivalent mf ,∆q. The fuel equivalent is added to thefuel consumption of the controller with the lower final soc. Doing so makes itpossible to calculate how much the total fuel consumption has increased or de-creased.
It is apparent that the hybrid mpc can achieve a reduction in fuel consumptionfor both Test case 1 and 2 for an initial soc value of 30% and 50%. In these casesthe heuristic controller is running the ice at low and maximum, thus the hybridmpc is able to reduce the total fuel consumption as it runs the ice at optimumpower at all times.
If the initial soc is set to 70% the heuristic ems is running the ice at optimumpower close to or at all times. The hybrid mpc performs worse than the heuristicems in these cases. There are a few possible reasons for this result. As mentionedearlier, the design of the test cases will make the hybrid mpc operate near theconstraint limits, resulting in a non-optimal output. Doing so repeatedly leads toa less efficient use of energy when propelling the train, resulting in a higher fuelconsumption. The way the hybridmpc follows the given speed profile could alsoresult in poorer performance.
For Test case 3 the hybrid mpc only performs better in the case of an initial socvalue of 30%. If the initial soc value is set to 50% or 70%, the heuristic emsoperates the ice at optimum power throughout the whole simulation apart from ashort instance at the end where it is run at low, see Figure 4.9. If we instead studythe hybrid mpc for this case, see Figure 4.10, it shows that the hev struggles to

4.5 Discussion 43
follow the speed reference. This implies that the tuning is sub-optimal in thiscase and will contribute to a higher fuel consumption.


5Conclusions and Future Work
This chapter gives a short conclusion of the thesis and presents a few possibleideas for future work.
5.1 Conclusions
The purpose of this thesis was to investigate the possibility of minimising the fuelconsumption of the series hev Ki-Ha E200. The train currently uses a heuristicems based on whether the train is powering, coasting or braking, and on the socof the storage battery and the vehicle speed. In this thesis, a hybrid mpc wasdesigned and implemented to study the possibility of achieving a reduced fuelconsumption.
To begin with, a model of the series hev was developed to express the systemdynamics. The model was used as an internal model in the hybrid mpc and tocalculate the evolution of the system states. The heuristic ems was implementedas a benchmark for the performance of the developed hybrid mpc. The two con-trollers have been tested for three different test cases, where each test case hasbeen run with three different initial values for the storage battery’s soc. In alltest cases, we have assumed a straight and flat track.
The overall performance of the hybrid mpc seems promising. The hybrid mpcruns the engine at its optimal operating point for all test cases and manages toreturn the battery’s soc to a value larger than or equal to its initial value. In termsof total fuel consumption the hybrid mpc performs better than the heuristic emsin most cases. However, in the case of a high initial value of soc of the battery,the hybrid mpc performs slightly worse in some of the test cases.
45

46 5 Conclusions and Future Work
5.2 Future Work
As this thesis only deals with a very simplified model of the actual system andthe developed controller has only been tested and analysed in simulation, a lot ofinteresting work remains to be done. Applying the controller to the actual systemwould of course be very interesting and valuable for the analysis of the controllerperformance, but more work is required before reaching that point.
Due to hardware limitations in the simulation platform, thempc prediction hori-zon has been restricted to a maximum of 40 time steps. Running simulations on aplatform with more computation power, or possibly rewriting the hybridmpc im-plementation to reduce the computational effort needed, would allow one to usea longer prediction horizon. Evaluating the effect of a longer prediction horizonis an interesting aspect to evaluate as it could further improve the performanceof the hybrid mpc.
The hybrid mpc has only been tested for the special case of a straight and flattrack. Therefore, a suitable first step for future work would be to include thetrack gradient and curvature. This result is of great interest as the performanceof the heuristic ems greatly decreases in environments with varying elevation,which increases the possibilty of improvement.

Bibliography
[1] Daniel Axehill. Integer Quadratic Programming for Control and Commu-nication. PhD thesis, Linköping University, 2008. Cited on page 22.
[2] Daniel Axehill and Manfred Morari. Improved complexity analysis ofbranch and bound for hybrid mpc. In 49th IEEE Conference on Decisionand Control, pages 4216–4222, Atlanta, USA, 2010. Cited on page 22.
[3] Francesco Borrelli, Alberto Bemporad, and Manfred Morari. Predictive Con-trol for Linear and Hybrid Systems. Cambridge University Press, 2017.Cited on pages 17 and 19.
[4] Raphael Cagienard, Pascal Grieder, Eric C. Kerrigan, and Manfred Morari.Move blocking strategies in receding horizon control. Journal of ProcessControl, 17(6):563–570, 2007. Cited on page 26.
[5] M. Enqvist, T. Glad, S. Gunnarsson, P. Lindskog, L. Ljung, J. Löfberg, T. McK-elvey, A. Stenman, and Strömberg J. Industriell reglerteknik Kurskom-pendium. Linköping University, 2014. Cited on page 17.
[6] Taketo Fujii, Nobutsugu Teraya, and Mitsuyuki Osawa. Development of anNE train. JR East Technical Review, (4):62–70, 2004. Cited on page 1.
[7] Torkel Glad and Lennart Ljung. Reglerteknik - Grundläggande teori. Stu-dentlitteratur, fourth edition, 2006. Cited on page 20.
[8] Inc. Gurobi Optimization. Gurobi optimizer reference manual, 2017. URLhttp://www.gurobi.com. Cited on page 21.
[9] Lino Guzzella and Antonio Sciarretta. Vehicle Propulsion Systems - Intro-duction to Modelling and Optimization. Springer, second edition, 2007.Cited on pages 5 and 13.
[10] J. Löfberg. Yalmip : A toolbox for modeling and optimization in MATLAB.In In Proceedings of the CACSD Conference, Taipei, Taiwan, 2004. Cited onpages 19 and 23.
47

48 Bibliography
[11] J.M. Maciejowski. Predictive Control with Constraints. Prentice Hall, 2002.Cited on pages 17 and 26.
[12] Masafumi Miyatake and Kideyoshi Ko. Optimization of train speed pro-file for minimum energy consumption. IEEJ Transactions on Electrical andElectronic Engineering, 5(3):263–269, 2010. Cited on page 2.
[13] N. Shiraki, H. Satou, and S. Arai. A Hybrid System for Diesel Railcar SeriesKi-Ha E200. In International Power Electronics Conference, pages 2853–2858, Sapporo, Japan, 2010. Cited on pages 1, 5, and 12.
[14] Naoki Shiraki and Keiichiro Kondo. Evaluation of design method for engineoutput power and battery energy capacity for lithium-ion battery hybriddiesel railway vehicles. Electrical Engineering in Japan, 185(3):49–56, 2013.Cited on pages 5, 9, and 11.
[15] Yasushi Uebo, Keiji Shimomura, Katsushi Nishie, Katsuya Nanamoto, Take-hito Matsubara, Haruo Seike, and Minoru Kuzuhara. Development of highpower li-ion cell "LIM25H" for industrial applications. GS Yuasa TechnicalReport, 12(2):12–17, 2015. Cited on page 12.
[16] Vital van Reeven, Rudolf Huisman, Michiel Pesgens, and Robert Koffrie. En-ergy management control concepts with preview for hybrid commercial ve-hicles. In 6th International Conference on Continuously Variable and Hy-brid Transmissions, Maastricht, Netherlands, 2010. Cited on page 2.
[17] Fengjun Yan, Junmin Wang, and Kaisheng Huang. Hybrid electrical ve-hicle model predictive control torque-split strategy incorporating enginetransient characteristics. IEEE Transactions on Vehicular Technology, 61(6):2458–2467, 2012. Cited on page 2.
[18] Kaijiang Yu, Haizhu Yang, Xingguo Tan, Taketoshi Kawabe, Yanan Guo,Qing Liang, Ziyi Fu, and Zheng Zheng. Model predictive control for hy-brid electric vehicle platooning using slope information. Transactions onIntelligent Transportation Systems, 17(7):1894–1909, 2016. Cited on page2.