
Mikio Sakemoto Intel K.K....Mikio Sakemoto Intel K.K. 2 Agenda ... Robotics is Compute-Intensive!...
54
Autonomous Mobile Robotics with Intel® RealSense™ Camera and ROS * Mikio Sakemoto Intel K.K.
Transcript of Mikio Sakemoto Intel K.K....Mikio Sakemoto Intel K.K. 2 Agenda ... Robotics is Compute-Intensive!...

Autonomous Mobile Robotics with Intel® RealSense™ Camera and ROS*
Mikio SakemotoIntel K.K.

2
Agenda• Robotics Overview
• Intel® Hardware for Robotics
• Robot Designs
• ROS* Concepts and Navigation
• Conclusion
© 2017 Intel Corporation. All rights reserved. Intel and the Intel logo are trademarks of Intel Corporation or its subsidiaries in the U.S. and/or other countries. *Other names and brands may be claimed as the property of others. For more complete information about compiler optimizations, see our Optimization Notice.
Robots come in many forms…

© 2017 Intel Corporation. All rights reserved. Intel and the Intel logo are trademarks of Intel Corporation or its subsidiaries in the U.S. and/or other countries. *Other names and brands may be claimed as the property of others. For more complete information about compiler optimizations, see our Optimization Notice.
Robots that interact with people need specialized skills:• Speech recognition
• Face recognition
• Dialogue management
• Context awareness
• Emotional state recognition
• Social relationship understanding
Social Robotics
© 2017 Intel Corporation. All rights reserved. Intel and the Intel logo are trademarks of Intel Corporation or its subsidiaries in the U.S. and/or other countries. *Other names and brands may be claimed as the property of others. For more complete information about compiler optimizations, see our Optimization Notice.
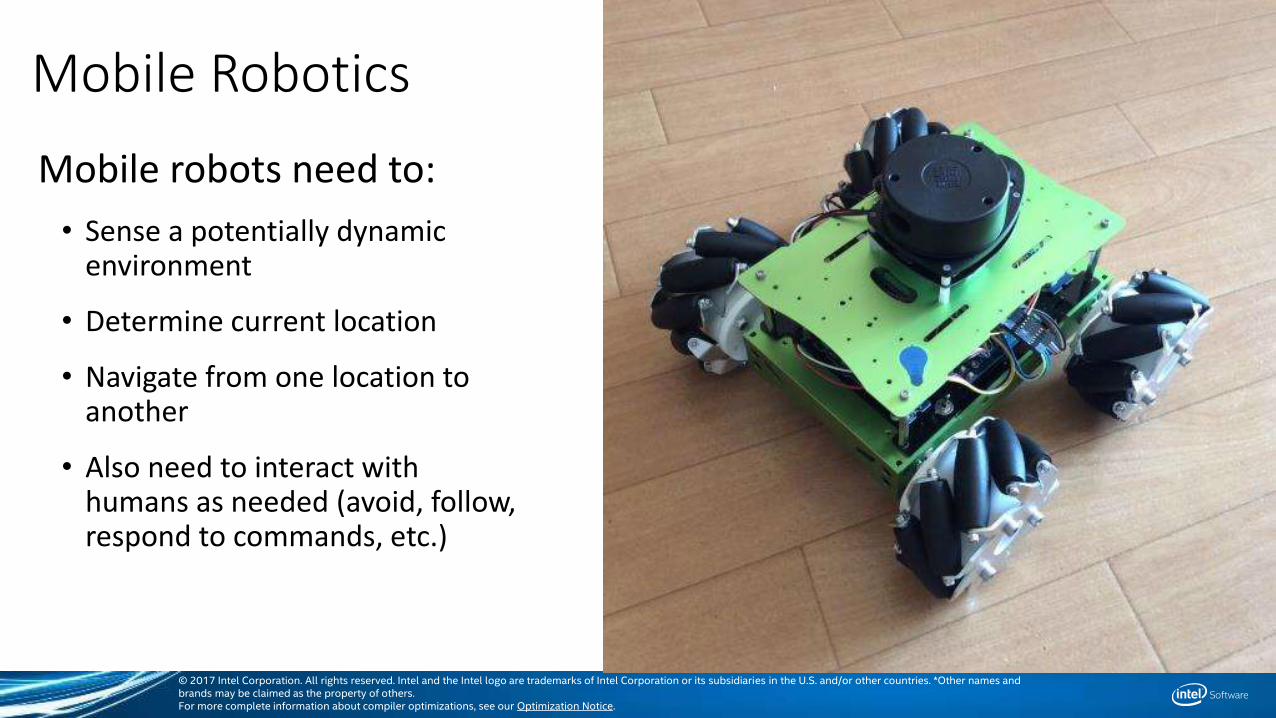
Mobile robots need to:
• Sense a potentially dynamic environment
• Determine current location
• Navigate from one location to another
• Also need to interact with humans as needed (avoid, follow, respond to commands, etc.)
Mobile Robotics

© 2017 Intel Corporation. All rights reserved. Intel and the Intel logo are trademarks of Intel Corporation or its subsidiaries in the U.S. and/or other countries. *Other names and brands may be claimed as the property of others. For more complete information about compiler optimizations, see our Optimization Notice.
Many Intel-Based Robot Designs!

© 2017 Intel Corporation. All rights reserved. Intel and the Intel logo are trademarks of Intel Corporation or its subsidiaries in the U.S. and/or other countries. *Other names and brands may be claimed as the property of others. For more complete information about compiler optimizations, see our Optimization Notice.
Savioke Relay with Intel® RealSense™

© 2017 Intel Corporation. All rights reserved. Intel and the Intel logo are trademarks of Intel Corporation or its subsidiaries in the U.S. and/or other countries. *Other names and brands may be claimed as the property of others. For more complete information about compiler optimizations, see our Optimization Notice.
8
CES 2016: Ninebot* and Intel Segway* Robot
http://robot.segway.com/

Typical Robot Software Stack
ServosWheel Motors
RGB Camera
Depth Camera
Motion Module
Touch Mic Array
Discrete SensorsIntel® RealSense™ Camera Drivers Motor Drivers
Senso
r Fusio
n
Point Cloud
2DMap
Body Tracking
Face Tracking
Object Recognition
RGBD+IMU / SLAM
Speech RecognitionBehaviorControl
Reflex
Goals
Interact
SpeechOutput
DialogControl
User/ World Knowledge
Gesture / Action
WorldView
RobotState
CommandInputs
Behavior Arbitrator
Path Planning
Movement
External Device Control
Voice CommandExternal
Controller
Gesture InputEnvironment
StimulusBehavior
BehaviorBehaviors
Applications
Acoustics
Op
tion
al Inp
uts
Cloudoffload &control
IRUltra-Sonic
Sense Plan Act
Sensor Hardware and Drivers Actuators
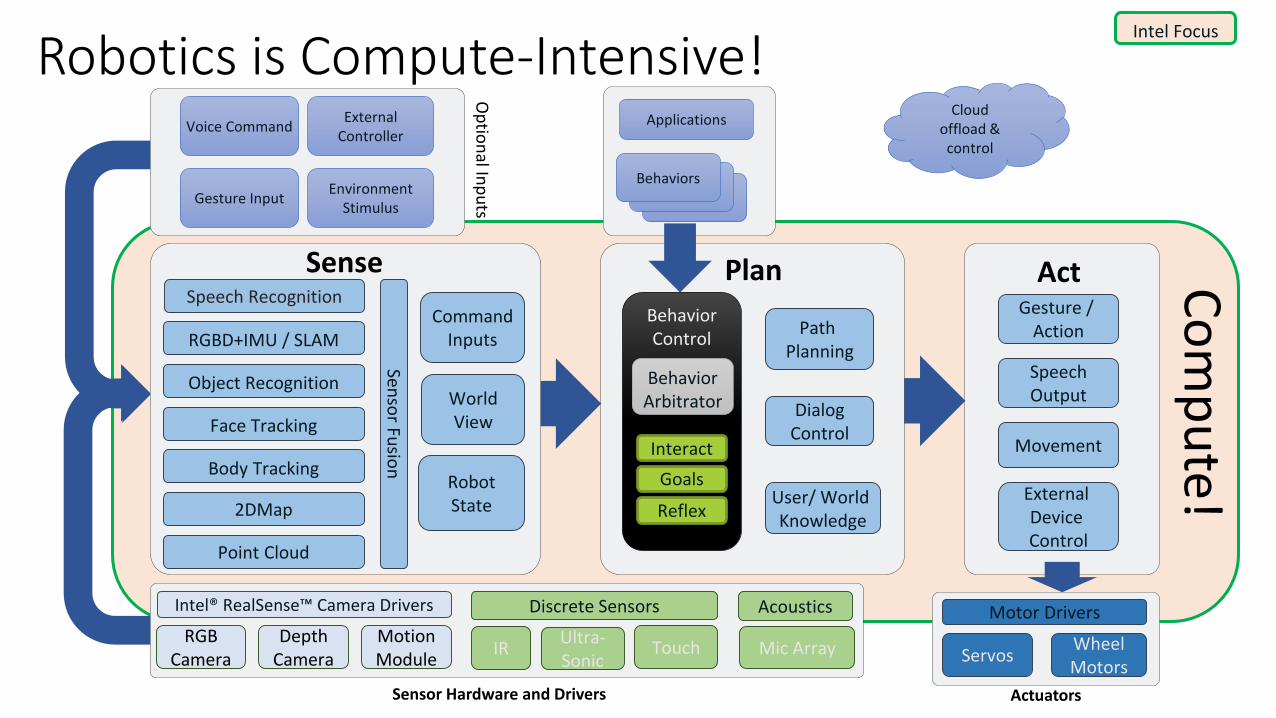
Robotics is Compute-Intensive!
ServosWheel Motors
RGB Camera
Depth Camera
Motion Module
Touch Mic Array
Discrete SensorsIntel® RealSense™ Camera Drivers Motor Drivers
Senso
r Fusio
n
Point Cloud
2DMap
Body Tracking
Face Tracking
Object Recognition
RGBD+IMU / SLAM
Speech RecognitionBehaviorControl
Reflex
Goals
Interact
SpeechOutput
DialogControl
User/ World Knowledge
Gesture / Action
WorldView
RobotState
CommandInputs
Behavior Arbitrator
Path Planning
Movement
External Device Control
Voice CommandExternal
Controller
Gesture InputEnvironment
StimulusBehavior
BehaviorBehaviors
Applications
Acoustics
Op
tion
al Inp
uts
Cloudoffload &control
IRUltra-Sonic
Sense Plan Act
Sensor Hardware and Drivers Actuators
Co
mp
ute!
Intel Focus

© 2017 Intel Corporation. All rights reserved. Intel and the Intel logo are trademarks of Intel Corporation or its subsidiaries in the U.S. and/or other countries. *Other names and brands may be claimed as the property of others. For more complete information about compiler optimizations, see our Optimization Notice.
Key Robotics Sensing RequirementsUnderstanding Environment Interaction with ObjectsInteraction with People
Map CreationLocalization (SLAM)Collision AvoidanceNavigationObject and Person Location
Person DetectionPerson TrackingPerson RecognitionPosture AnalysisBody Gestures
Object Segmentation Object Recognition3D ReconstructionObject Localization

© 2017 Intel Corporation. All rights reserved. Intel and the Intel logo are trademarks of Intel Corporation or its subsidiaries in the U.S. and/or other countries. *Other names and brands may be claimed as the property of others. For more complete information about compiler optimizations, see our Optimization Notice.
6DoF Tracking Re-localizationMapping • Track with no prior information
about the environment• Robust to moving or displaced
objects in scene• Robust to loss and degradation of
sensor inputs
• Integrates geometry and depth information
• re-localizes to a pre-defined coordinate system
• 2D Occupancy Map during robot exploration
• Dynamically updated as the environment changes
• Registered to a SLAM Map, share across systems
Navigation Capabilities - SLAM

© 2017 Intel Corporation. All rights reserved. Intel and the Intel logo are trademarks of Intel Corporation or its subsidiaries in the U.S. and/or other countries. *Other names and brands may be claimed as the property of others. For more complete information about compiler optimizations, see our Optimization Notice.
SLAM with 2D Mapping
SLAM Created Navigation Map

© 2017 Intel Corporation. All rights reserved. Intel and the Intel logo are trademarks of Intel Corporation or its subsidiaries in the U.S. and/or other countries. *Other names and brands may be claimed as the property of others. For more complete information about compiler optimizations, see our Optimization Notice.
SLAM with 3D Reconstruction

15
Agenda• Robotics Overview
• Intel® Hardware for Robotics
• Robot Designs
• ROS* Concepts and Navigation
• Conclusion

© 2017 Intel Corporation. All rights reserved. Intel and the Intel logo are trademarks of Intel Corporation or its subsidiaries in the U.S. and/or other countries. *Other names and brands may be claimed as the property of others. For more complete information about compiler optimizations, see our Optimization Notice.
Generic Robot Hardware Architecture
Master Computer
Linux*
Slave MCU
RTOS
Vision
Audio
Actuators
Sensors
Network
Localization
© 2017 Intel Corporation. All rights reserved. Intel and the Intel logo are trademarks of Intel Corporation or its subsidiaries in the U.S. and/or other countries. *Other names and brands may be claimed as the property of others. For more complete information about compiler optimizations, see our Optimization Notice.
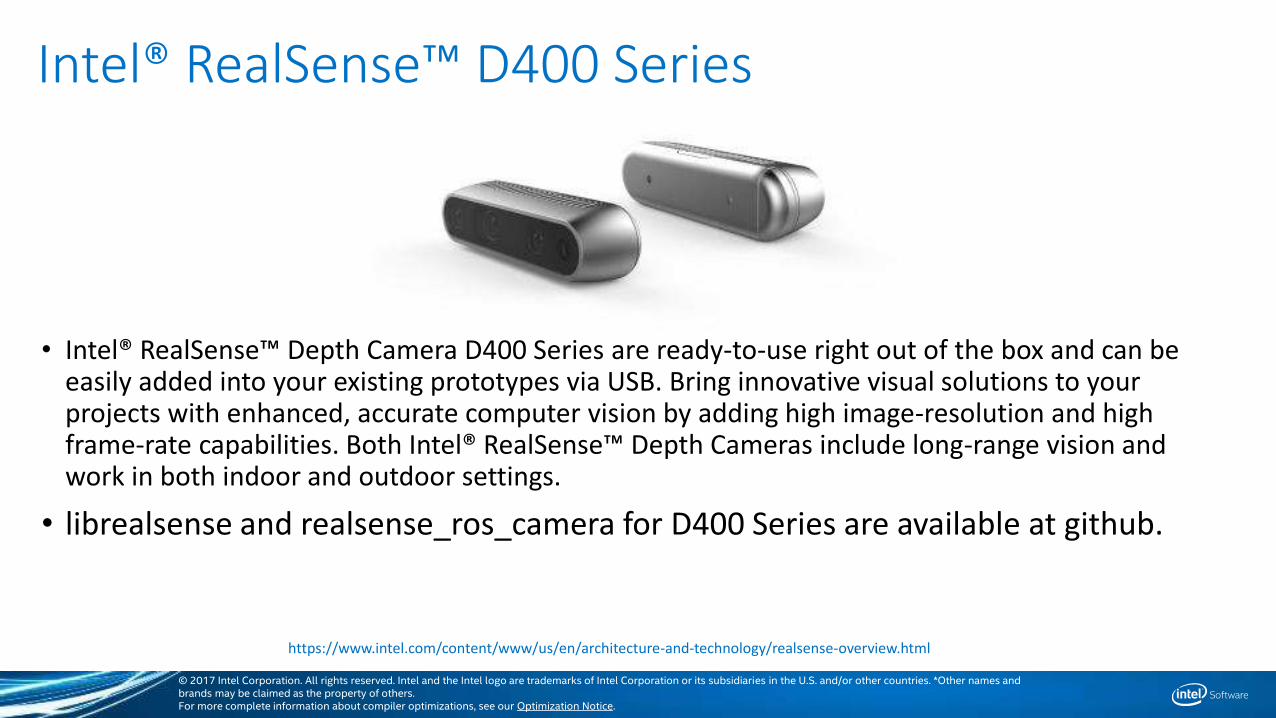
Intel® RealSense™ D400 Series
https://www.intel.com/content/www/us/en/architecture-and-technology/realsense-overview.html
• Intel® RealSense™ Depth Camera D400 Series are ready-to-use right out of the box and can be easily added into your existing prototypes via USB. Bring innovative visual solutions to your projects with enhanced, accurate computer vision by adding high image-resolution and high frame-rate capabilities. Both Intel® RealSense™ Depth Cameras include long-range vision and work in both indoor and outdoor settings.
• librealsense and realsense_ros_camera for D400 Series are available at github.

© 2017 Intel Corporation. All rights reserved. Intel and the Intel logo are trademarks of Intel Corporation or its subsidiaries in the U.S. and/or other countries. *Other names and brands may be claimed as the property of others. For more complete information about compiler optimizations, see our Optimization Notice.
• Powerful computer in a small package
• Intel® Core™ i5/i7 processors
• Large and configurable memory, drive size, etc.
• Wi-Fi* and Bluetooth*, 4K video, USB3.0 ports, Gen acceleration…
• Broad OS support, including Linux*
Intel® NUC
Maximum performance for robotics development

© 2017 Intel Corporation. All rights reserved. Intel and the Intel logo are trademarks of Intel Corporation or its subsidiaries in the U.S. and/or other countries. *Other names and brands may be claimed as the property of others. For more complete information about compiler optimizations, see our Optimization Notice.
19
OEM Boards for robotics
Rapid prototype-to-production for robotics development
http://www.up-board.org/upsquared/
20
Agenda• Robotics Overview
• Intel® Hardware for Robotics
• Robot Designs
• ROS* Concepts and Navigation
• Conclusion
© 2017 Intel Corporation. All rights reserved. Intel and the Intel logo are trademarks of Intel Corporation or its subsidiaries in the U.S. and/or other countries. *Other names and brands may be claimed as the property of others. For more complete information about compiler optimizations, see our Optimization Notice.
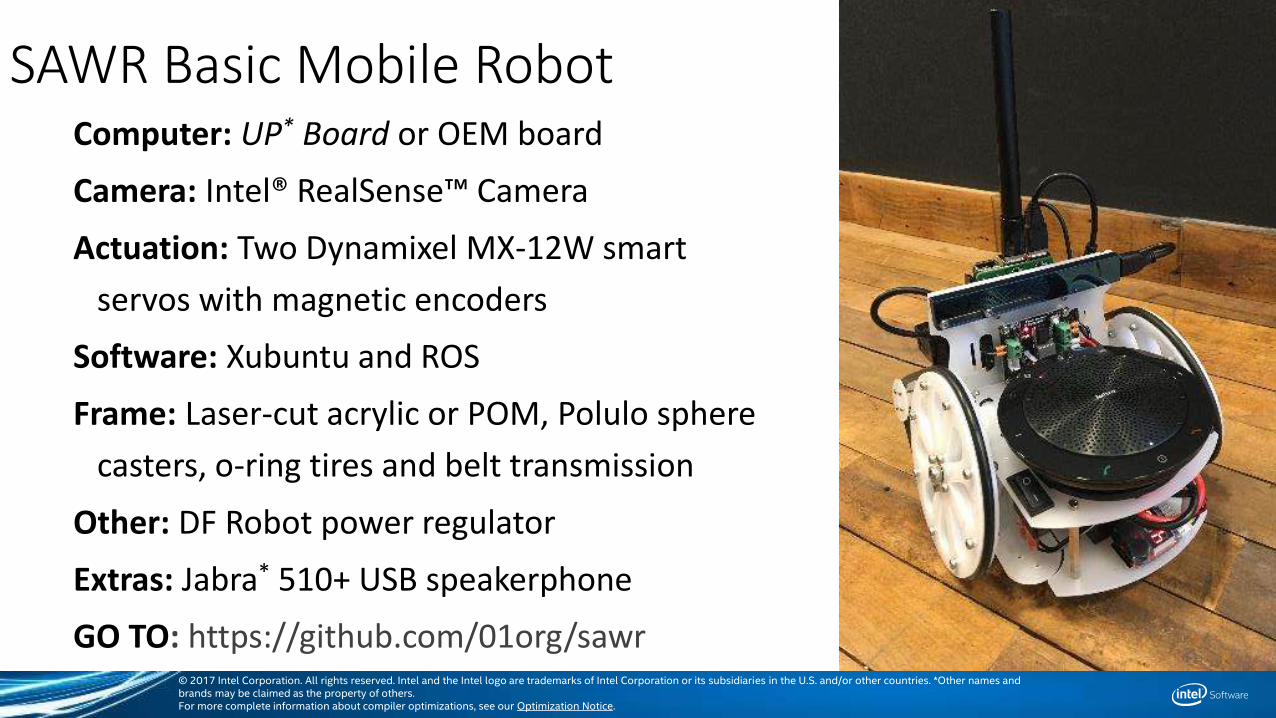
SAWR Basic Mobile RobotComputer: UP* Board or OEM board
Camera: Intel® RealSense™ Camera
Actuation: Two Dynamixel MX-12W smart
servos with magnetic encoders
Software: Xubuntu and ROS
Frame: Laser-cut acrylic or POM, Polulo sphere
casters, o-ring tires and belt transmission
Other: DF Robot power regulator
Extras: Jabra* 510+ USB speakerphone
GO TO: https://github.com/01org/sawr

© 2017 Intel Corporation. All rights reserved. Intel and the Intel logo are trademarks of Intel Corporation or its subsidiaries in the U.S. and/or other countries. *Other names and brands may be claimed as the property of others. For more complete information about compiler optimizations, see our Optimization Notice.
01.org/sawr

© 2017 Intel Corporation. All rights reserved. Intel and the Intel logo are trademarks of Intel Corporation or its subsidiaries in the U.S. and/or other countries. *Other names and brands may be claimed as the property of others. For more complete information about compiler optimizations, see our Optimization Notice.
Can Build sawr with Either UP Board or OEM board

© 2017 Intel Corporation. All rights reserved. Intel and the Intel logo are trademarks of Intel Corporation or its subsidiaries in the U.S. and/or other countries. *Other names and brands may be claimed as the property of others. For more complete information about compiler optimizations, see our Optimization Notice.
Development Process
• Software stack based on modification and simplification of the OSRF*
Turtlebot* stack
• Custom motor driver written based directly on Dynamixel* Linux* SDK
• Frame parametrically modelled using OpenSCAD*
and then converted to lasercut files using Inkscape*

© 2017 Intel Corporation. All rights reserved. Intel and the Intel logo are trademarks of Intel Corporation or its subsidiaries in the U.S. and/or other countries. *Other names and brands may be claimed as the property of others. For more complete information about compiler optimizations, see our Optimization Notice.
Laser Cut Frame
One 450 x 300 x 3mm sheet and one 450 x 300 x 2mm sheet

© 2017 Intel Corporation. All rights reserved. Intel and the Intel logo are trademarks of Intel Corporation or its subsidiaries in the U.S. and/or other countries. *Other names and brands may be claimed as the property of others. For more complete information about compiler optimizations, see our Optimization Notice.
DIY… FOSS
• Detailed instructions, assembly, and setup plans available online…
• Open-source HW and SW

© 2017 Intel Corporation. All rights reserved. Intel and the Intel logo are trademarks of Intel Corporation or its subsidiaries in the U.S. and/or other countries. *Other names and brands may be claimed as the property of others. For more complete information about compiler optimizations, see our Optimization Notice.
Robot Architecture: with UP BoardMaster
Aaeon* UP* Board
Slave
Robotis* Dynamixel*
MX-12W Smart Motors
Intel® RealSense™ camera
Audio I/O (Jabra* 510+) [optional]
USB3.0
USB2.0
UART (via USB2AX)
Full-bridge motor driver (PWM)
Magnetic quadrature encoder
Torque sensing (motor current)
Gb Eth
HDMI
Wi-Fi*/Bluetooth*USB2.0
© 2017 Intel Corporation. All rights reserved. Intel and the Intel logo are trademarks of Intel Corporation or its subsidiaries in the U.S. and/or other countries. *Other names and brands may be claimed as the property of others. For more complete information about compiler optimizations, see our Optimization Notice.
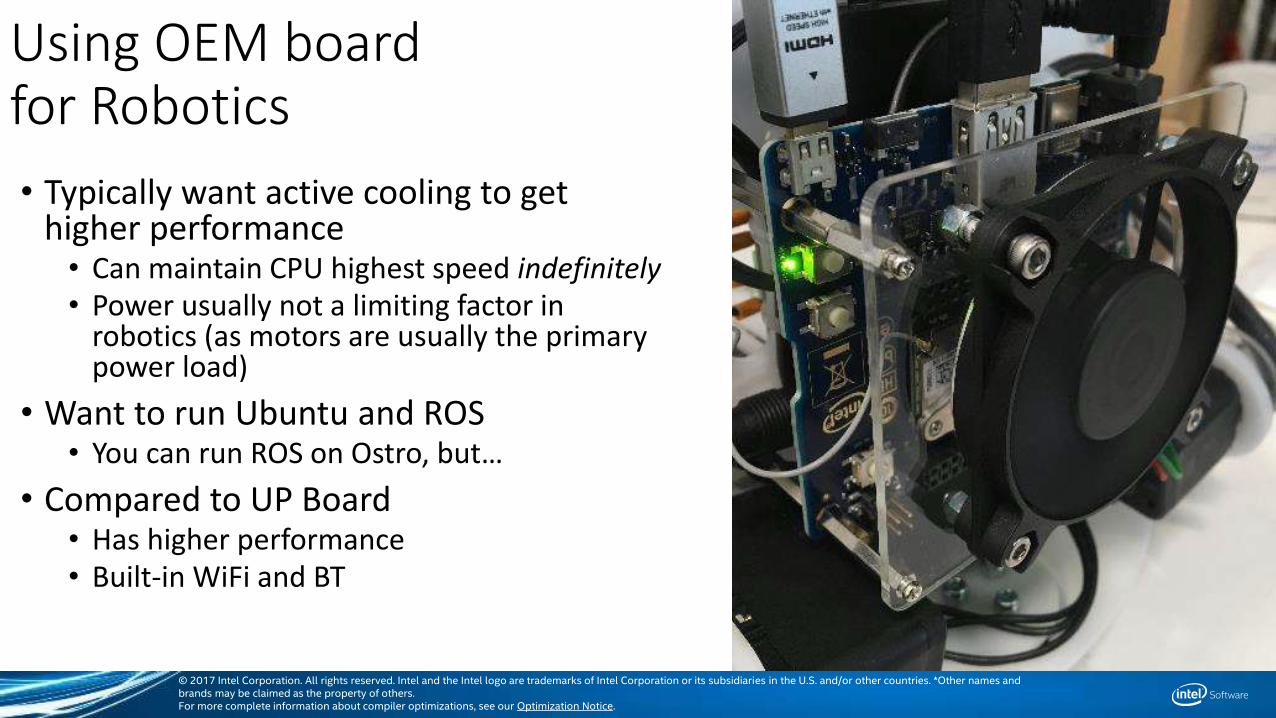
Using OEM board for Robotics
• Typically want active cooling to get higher performance• Can maintain CPU highest speed indefinitely• Power usually not a limiting factor in
robotics (as motors are usually the primary power load)
• Want to run Ubuntu and ROS• You can run ROS on Ostro, but…
• Compared to UP Board• Has higher performance• Built-in WiFi and BT

© 2017 Intel Corporation. All rights reserved. Intel and the Intel logo are trademarks of Intel Corporation or its subsidiaries in the U.S. and/or other countries. *Other names and brands may be claimed as the property of others. For more complete information about compiler optimizations, see our Optimization Notice.
And Now: Turtlebot 3!

© 2017 Intel Corporation. All rights reserved. Intel and the Intel logo are trademarks of Intel Corporation or its subsidiaries in the U.S. and/or other countries. *Other names and brands may be claimed as the property of others. For more complete information about compiler optimizations, see our Optimization Notice.
Turtlebot 3*
• Joint effort between Intel, Robotis*, and OSRF*
• Modular, can support many custom configurations

© 2017 Intel Corporation. All rights reserved. Intel and the Intel logo are trademarks of Intel Corporation or its subsidiaries in the U.S. and/or other countries. *Other names and brands may be claimed as the property of others. For more complete information about compiler optimizations, see our Optimization Notice.
Multiple Camera Support
• Possible to run up to 3 Intel® RealSense™ cameras• Although with more than
two, frame rate reduction is necessary
• Intel® RealSense™ZR300 drivers for Linux*
only
32
Agenda• Robotics Overview
• Intel® Hardware for Robotics
• Robot Designs
• ROS* Concepts and Navigation
• Conclusion

© 2017 Intel Corporation. All rights reserved. Intel and the Intel logo are trademarks of Intel Corporation or its subsidiaries in the U.S. and/or other countries. *Other names and brands may be claimed as the property of others. For more complete information about compiler optimizations, see our Optimization Notice.
ROS*: Robot Operating System
• Supports distributed system based on a graph of communicating nodes
• Large community with many existing nodes for sensors, planning, navigation, etc.
• Various visualization tools and simulators are also provided
© 2017 Intel Corporation. All rights reserved. Intel and the Intel logo are trademarks of Intel Corporation or its subsidiaries in the U.S. and/or other countries. *Other names and brands may be claimed as the property of others. For more complete information about compiler optimizations, see our Optimization Notice.
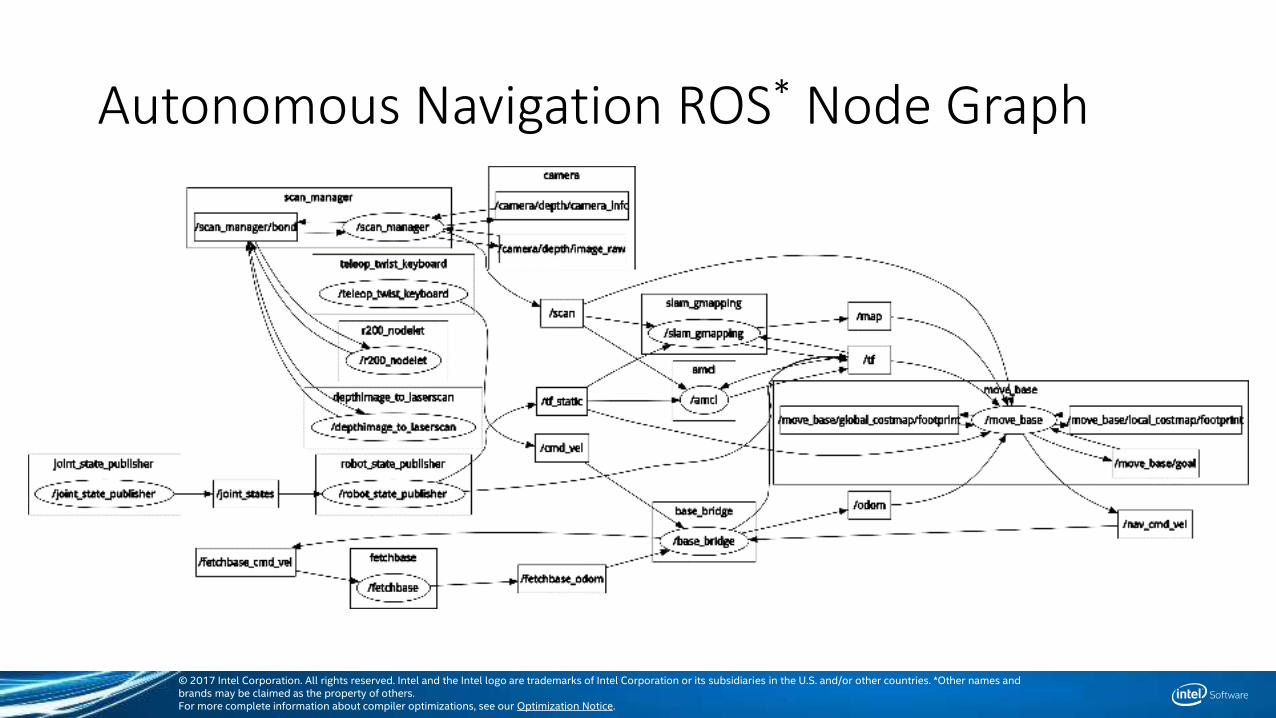
Autonomous Navigation ROS* Node Graph

© 2017 Intel Corporation. All rights reserved. Intel and the Intel logo are trademarks of Intel Corporation or its subsidiaries in the U.S. and/or other countries. *Other names and brands may be claimed as the property of others. For more complete information about compiler optimizations, see our Optimization Notice.
Basic ROS* Concepts: Messages and Topics• Publish/subscribe data on uniquely named topics
• Topics can have multiple publishers and subscribers
• Messages are typed, can carry multiple elements
Node Node
Topic
Publish Subscribe

© 2017 Intel Corporation. All rights reserved. Intel and the Intel logo are trademarks of Intel Corporation or its subsidiaries in the U.S. and/or other countries. *Other names and brands may be claimed as the property of others. For more complete information about compiler optimizations, see our Optimization Notice.
Basic ROS* Concepts: Messages and Topics
NodeNode
Topic
Node
Node
Node

© 2017 Intel Corporation. All rights reserved. Intel and the Intel logo are trademarks of Intel Corporation or its subsidiaries in the U.S. and/or other countries. *Other names and brands may be claimed as the property of others. For more complete information about compiler optimizations, see our Optimization Notice.
Basic ROS* Concepts: Service Calls• Synchronous remote procedure call
• Caller blocks until response received
• Of limited use: synchronization, get/set
Node Node
Service Call: Request
Service Call: Response

© 2017 Intel Corporation. All rights reserved. Intel and the Intel logo are trademarks of Intel Corporation or its subsidiaries in the U.S. and/or other countries. *Other names and brands may be claimed as the property of others. For more complete information about compiler optimizations, see our Optimization Notice.
ROS* Concepts: Actions• Asynchronous goal-directed behavior control based on standard set of
topics
• Set goals, initiate actions, monitor progress, cancel if necessary, be informed of success or failure
Node Node
Action: Goal
Action: Progress
Action: Progress
Action: Success
© 2017 Intel Corporation. All rights reserved. Intel and the Intel logo are trademarks of Intel Corporation or its subsidiaries in the U.S. and/or other countries. *Other names and brands may be claimed as the property of others. For more complete information about compiler optimizations, see our Optimization Notice.
Basic ROS* Concepts: Parameters• Parameter server provides typed constant data at startup
• Parameters can be specified in various ways: command line, parameter files, launch file parameters, etc.
• Newer version of ROS provide dynamic parameter update
Node Node
Parameters
39

© 2017 Intel Corporation. All rights reserved. Intel and the Intel logo are trademarks of Intel Corporation or its subsidiaries in the U.S. and/or other countries. *Other names and brands may be claimed as the property of others. For more complete information about compiler optimizations, see our Optimization Notice.
Other ROS ConceptsPackages:
• Collections of files used to implement or specify a service or node in ROS*, built together using catkin (typically)
URDF (Universal Robot Description):
• XML files describing joints and transformations between joints in a 3D model of robot
Launch Files:
• XML files describing a set of nodes and parameters for a ROS graph
YAML (Yet Another Markup Language):
• Used for parameter specification on the command line and in files
© 2017 Intel Corporation. All rights reserved. Intel and the Intel logo are trademarks of Intel Corporation or its subsidiaries in the U.S. and/or other countries. *Other names and brands may be claimed as the property of others. For more complete information about compiler optimizations, see our Optimization Notice.
ROS* ToolsRviz:• Visualize various forms of dynamic 3D data in context: transforms, maps, point
clouds, imagesGazebo:• Robot simulation, including collisions, inertia, perceptual errors, etc.
Rqt:• Visualize graphs of nodes and topicsCommand-line tools:
• Listen to and publish on topics, make service calls, initiate actions• Filter and monitor error messagesCatkin:• Build system and package management

© 2017 Intel Corporation. All rights reserved. Intel and the Intel logo are trademarks of Intel Corporation or its subsidiaries in the U.S. and/or other countries. *Other names and brands may be claimed as the property of others. For more complete information about compiler optimizations, see our Optimization Notice.
Rviz: Robot Visualization

© 2017 Intel Corporation. All rights reserved. Intel and the Intel logo are trademarks of Intel Corporation or its subsidiaries in the U.S. and/or other countries. *Other names and brands may be claimed as the property of others. For more complete information about compiler optimizations, see our Optimization Notice.
ROS* common modules for autonomous movetf(tf2):• Coordinate transform library.slam_gmapping:• ROS wrapper for OpenSlam's Gmapping.move_base:• planning route, maintain cost maps, and navigationamcl:• probabilistic localization systemRobot_state_publisher:• publishes the 3D poses of the robot links

© 2017 Intel Corporation. All rights reserved. Intel and the Intel logo are trademarks of Intel Corporation or its subsidiaries in the U.S. and/or other countries. *Other names and brands may be claimed as the property of others. For more complete information about compiler optimizations, see our Optimization Notice.
tf frame

© 2017 Intel Corporation. All rights reserved. Intel and the Intel logo are trademarks of Intel Corporation or its subsidiaries in the U.S. and/or other countries. *Other names and brands may be claimed as the property of others. For more complete information about compiler optimizations, see our Optimization Notice.
Hints for custom robot using sawr stack…
• sawr_master: Master package, launch scripts.• Modify if you change modules.
• sawr_description: Run-time physical description (URDF files).• Modify urdf and xacro files according to your robot dimension (check with tf tree/frame)
• sawr_base: Motor controller and hardware interfacing.• Prepare your own motor controller and odometry libraries
• sawr_scan: Camera configuration.• You can use as-is in most cases
• sawr_mapping: SLAM configuration.• You can begin from as-is if you use same hardware configuration with sawr.
• sawr_navigation: Move-base configuration.• Modify and tune parameters of global/local costmap, move_base.

© 2017 Intel Corporation. All rights reserved. Intel and the Intel logo are trademarks of Intel Corporation or its subsidiaries in the U.S. and/or other countries. *Other names and brands may be claimed as the property of others. For more complete information about compiler optimizations, see our Optimization Notice.
Hints for custom robot using sawr stack…RealSense (sawr_scan)
State publisher (sawr_description)
SLAM (sawr_mapping)
Navigation (sawr_navigation)
Motor(sawr_base)
Transform

© 2017 Intel Corporation. All rights reserved. Intel and the Intel logo are trademarks of Intel Corporation or its subsidiaries in the U.S. and/or other countries. *Other names and brands may be claimed as the property of others. For more complete information about compiler optimizations, see our Optimization Notice.
Rviz demo move of SAWR based robot

48
Agenda• Robotics Overview
• Intel® Hardware for Robotics
• Robot Designs
• ROS* Concepts and Navigation
• Conclusion

© 2017 Intel Corporation. All rights reserved. Intel and the Intel logo are trademarks of Intel Corporation or its subsidiaries in the U.S. and/or other countries. *Other names and brands may be claimed as the property of others. For more complete information about compiler optimizations, see our Optimization Notice.
Conclusions• Autonomous mobile robotics is an emerging area
• Technology for mobile robotics is now relatively mature• Expect to see autonomous vehicles on the road soon!
• Robotics involves all aspects of computer science and engineering• AI, computer vision, machine learning, speech understanding, IoT,
networking, real-time control…
• Intel provides many key components enabling sophisticated robotics
• ROS* is a key framework for robot SW development
© 2017 Intel Corporation. All rights reserved. Intel and the Intel logo are trademarks of Intel Corporation or its subsidiaries in the U.S. and/or other countries. *Other names and brands may be claimed as the property of others. For more complete information about compiler optimizations, see our Optimization Notice.
Additional Sources of Information
• OSRF: http://www.osrfoundation.org/
• ROS*: http://ros.org and http://wiki.ros.org
• SAWR: http://01.org/sawr or http://github.com/01org/sawr
• Turtlebot 3: http://turtlebot3.robotis.com/en/latest/hardware.html
• Recommended books: 1. Programming Robots with ROS: A Practical Introduction to the Robot
Operating System, by Morgan Quigley and Brian Gerkey. O’Reilly, 2015.2. Learning ROS for Robotics Programming, 2nd Edition, by Enrique Fernandez
and Luis Sanchez Crespo, PACKT, 20153. Mastering ROS for Robotics Programming, by Lentin Joseph, PACKT, 2015

© 2017 Intel Corporation. All rights reserved. Intel and the Intel logo are trademarks of Intel Corporation or its subsidiaries in the U.S. and/or other countries. *Other names and brands may be claimed as the property of others. For more complete information about compiler optimizations, see our Optimization Notice.
Backup

© 2017 Intel Corporation. All rights reserved. Intel and the Intel logo are trademarks of Intel Corporation or its subsidiaries in the U.S. and/or other countries. *Other names and brands may be claimed as the property of others. For more complete information about compiler optimizations, see our Optimization Notice.
インテル® Parallel Studio XEベータ2018の
無料の30日間試用版を今日ダウンロードします>固有のタグ付けを持つ貴社のカスタムURLを以下のサンプルリンクに挿入してください
https://intelcustomer.az1.qualtrics.com/SE/?SID=SV_09AEJgAYdKezL6d&Q_JFE=0
忘れずに以下のことを行ってください...
貴社の商品とURLの宣伝に、どうぞこのスライドをテンプレートとしてご使用ください例えば、上の例はインテル® Parallel Studio XEベータ2018の販促用のものとなっています
卓越した性能を持つコード
このプレゼンテーション後に評価調査をEメールで送信いたしますので、
受信トレイ内をご確認ください。
追記アンケートにご記入いただいた方全員に、研修完了を示す個人の証明書をお送りいたします!
商品ボックスの写真をここに挿入してください。

© 2017 Intel Corporation. All rights reserved. Intel and the Intel logo are trademarks of Intel Corporation or its subsidiaries in the U.S. and/or other countries. *Other names and brands may be claimed as the property of others. For more complete information about compiler optimizations, see our Optimization Notice.
Legal Notices and Disclaimers
• Intel technologies’ features and benefits depend on system configuration and may require enabled hardware, software or service activation. Performance varies depending on system configuration. No computer system can be absolutely secure. Check with your system manufacturer or retailer or learn more at intel.com.
• Tests document performance of components on a particular test, in specific systems. Differences in hardware, software, or configuration will affect actual performance. Consult other sources of information to evaluate performance as you consider your purchase. For more complete information about performance and benchmark results, visit http://www.intel.com/performance.
• Software and workloads used in performance tests may have been optimized for performance only on Intel microprocessors. Performance tests, such as SYSmark and MobileMark, are measured using specific computer systems, components, software, operations and functions. Any change to any of those factors may cause the results to vary. You should consult other information and performance tests to assist you in fully evaluating your contemplated purchases, including the performance of that product when combined with other products. For more complete information visit http://www.intel.com/performance.
• Cost reduction scenarios described are intended as examples of how a given Intel-based product, in the specified circumstances and configurations, may affect future costs and provide cost savings. Circumstances will vary. Intel does not guarantee any costs or cost reduction.
• This document contains information on products, services and/or processes in development. All information provided here is subject to change without notice. Contact your Intel representative to obtain the latest forecast, schedule, specifications and roadmaps.
• No license (express or implied, by estoppel or otherwise) to any intellectual property rights is granted by this document.
• Statements in this document that refer to Intel’s plans and expectations for the quarter, the year, and the future, are forward-looking statements that involve a number of risks and uncertainties. A detailed discussion of the factors that could affect Intel’s results and plans is included in Intel’s SEC filings, including the annual report on Form 10-K.
• All products, computer systems, dates and figures specified are preliminary based on current expectations, and are subject to change without notice. The products described may contain design defects or errors known as errata which may cause the product to deviate from published specifications. Current characterized errata are available on request.
• Intel does not control or audit third-party benchmark data or the web sites referenced in this document. You should visit the referenced web site and confirm whether referenced data are accurate.
• © 2016 Intel Corporation. Intel, the Intel logo, Intel Core, Intel. Experience What’s Inside, Intel. Experience What’s Inside Logo, RealSense are trademarks of Intel Corporation or its subsidiaries in the U.S. and/or other countries.
• *Other names and brands may be claimed as the property of others.

© 2017 Intel Corporation. All rights reserved. Intel and the Intel logo are trademarks of Intel Corporation or its subsidiaries in the U.S. and/or other countries. *Other names and brands may be claimed as the property of others. For more complete information about compiler optimizations, see our Optimization Notice.







![yksdlHkk esa ekuo vfèkdkj laj{k.k (la'kksèku) foèks;d ......Lora=krk] cgqokn vkSj ekuo vfèkdkjksa ds çHkkoh laj{k.k rFkk mudk laoèkZu djus gsrq cy feysxkA ekuo vfèkdkj laj{k.k](https://static.fdocuments.in/doc/165x107/5e41412a110c0178e44d1b65/yksdlhkk-esa-ekuo-vfkdkj-lajkk-lakksku-foksd-lorakrk-cgqokn.jpg)










