Mihai Budiu May 23, 2007. Based On Critical Path: A Tool for System-Level Timing Analysis Girish...
20
Mihai Budiu May 23, 2007
-
date post
21-Dec-2015 -
Category
Documents
-
view
214 -
download
0
Transcript of Mihai Budiu May 23, 2007. Based On Critical Path: A Tool for System-Level Timing Analysis Girish...
Mihai BudiuMay 23, 2007

Based On
Critical Path: A Tool for System-Level Timing Analysis Girish Venkataramani, Tiberiu Chelcea, Mihai Budiu, and Seth C. Goldstein, Design Automation Conference (DAC), San Diego, CA, June 4-8, 2007
Girish Venkataramani: summer intern here in 2005
Now graduating from CMU
His Ph.D. thesis: A System Level Timing Analysis and Optimization Methodology for Hardware Compilation is based on the Global Critical Path
2
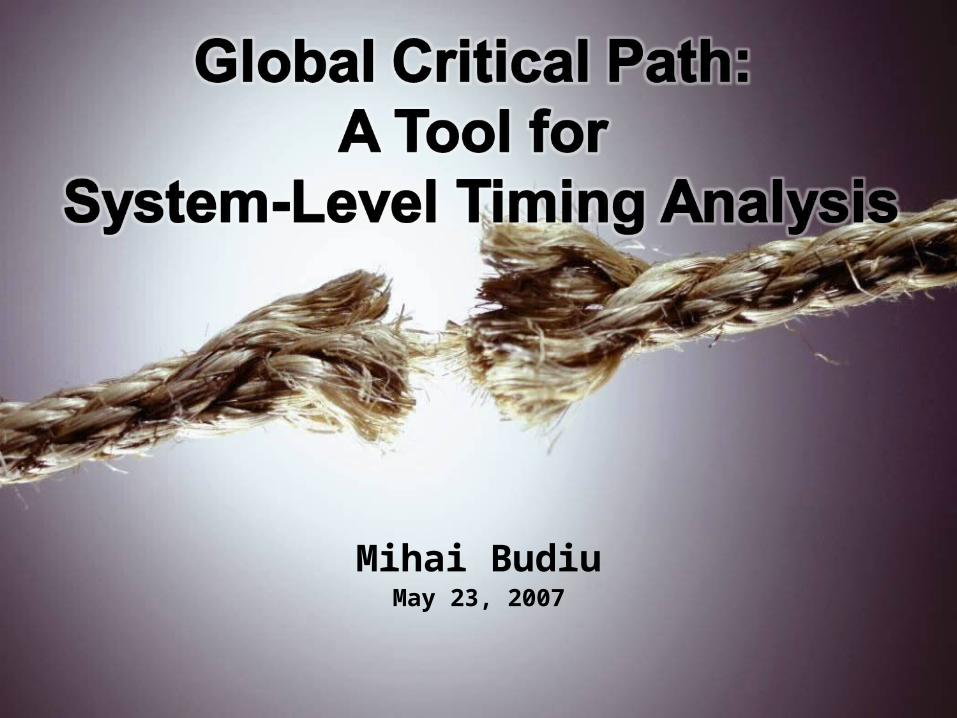
Critical Path
Longest path between source and sink in DAG
3
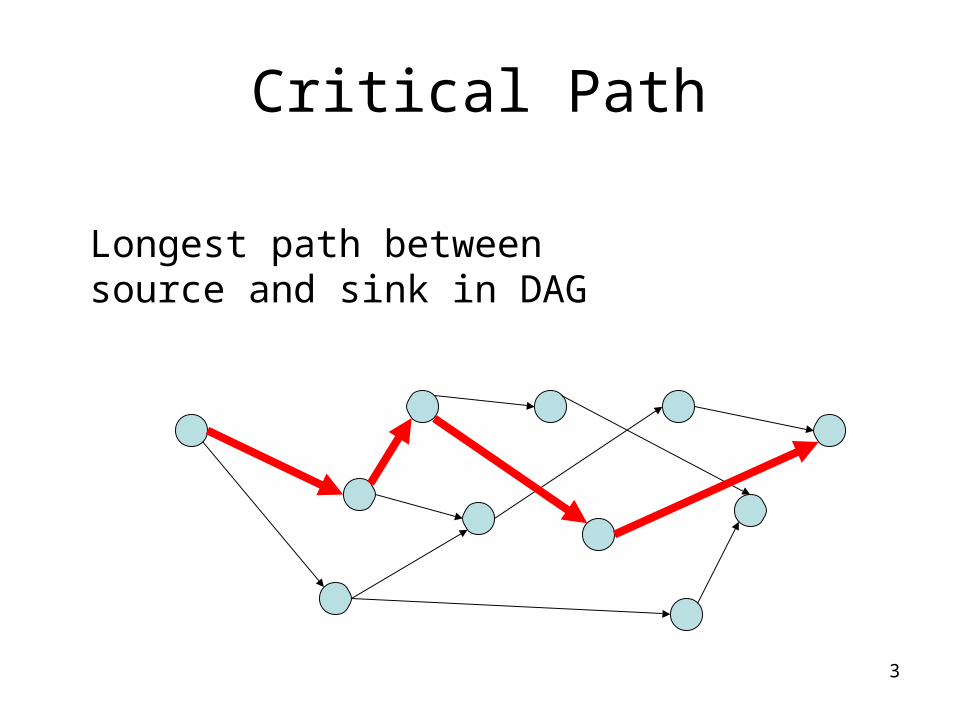
Synchronous Combinational Circuits
Latc
h
Latc
h
clk
Longest signal propagating path between two consecutive latches.
clk > crit path
4

Events = (n1, t1) → (n2, t2)
Events
Circuit (V, E)
Events = Signal Transitions on edges E
5

Chaining of Events
Circuit (V, E)6
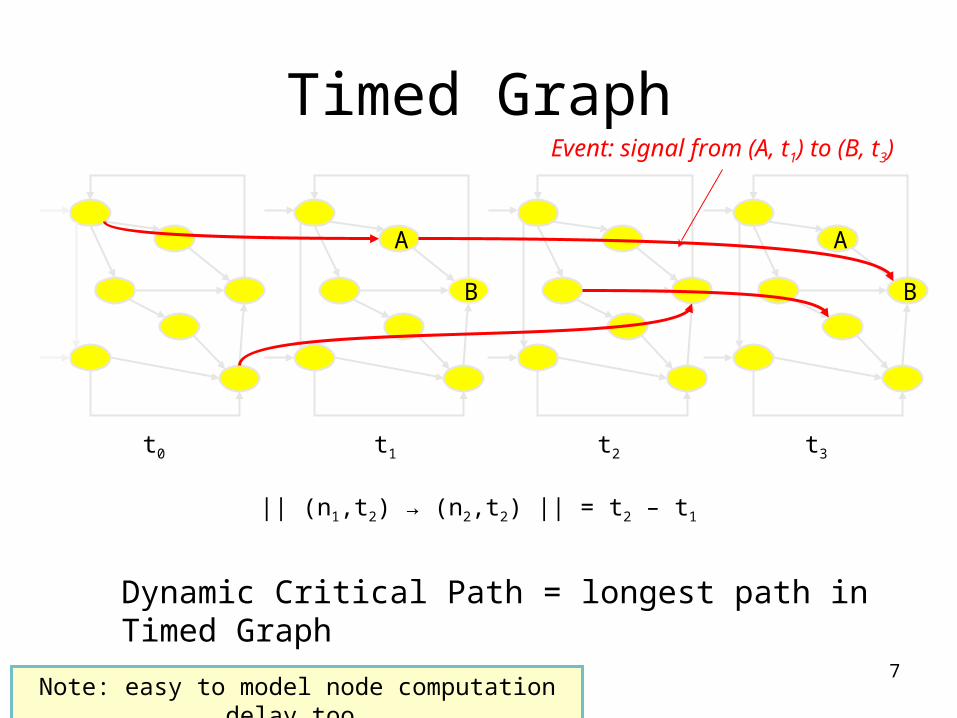
Timed Graph
B
A
B
A
t0 t1 t2 t3
Dynamic Critical Path = longest path in Timed Graph
|| (n1,t2) → (n2,t2) || = t2 – t1
7
Event: signal from (A, t1) to (B, t3)
Note: easy to model node computation delay too.

Goal: Apply to Real Circuits
+ reg
Delay
C H/S
+ reg
Delay
C H/S
+ reg
Delay
C H/S
data
reqi
acki
data
reqi
ackiacko
1 2 3 4
In this work focused on asynchronous 4-way handshake circuits
reqo
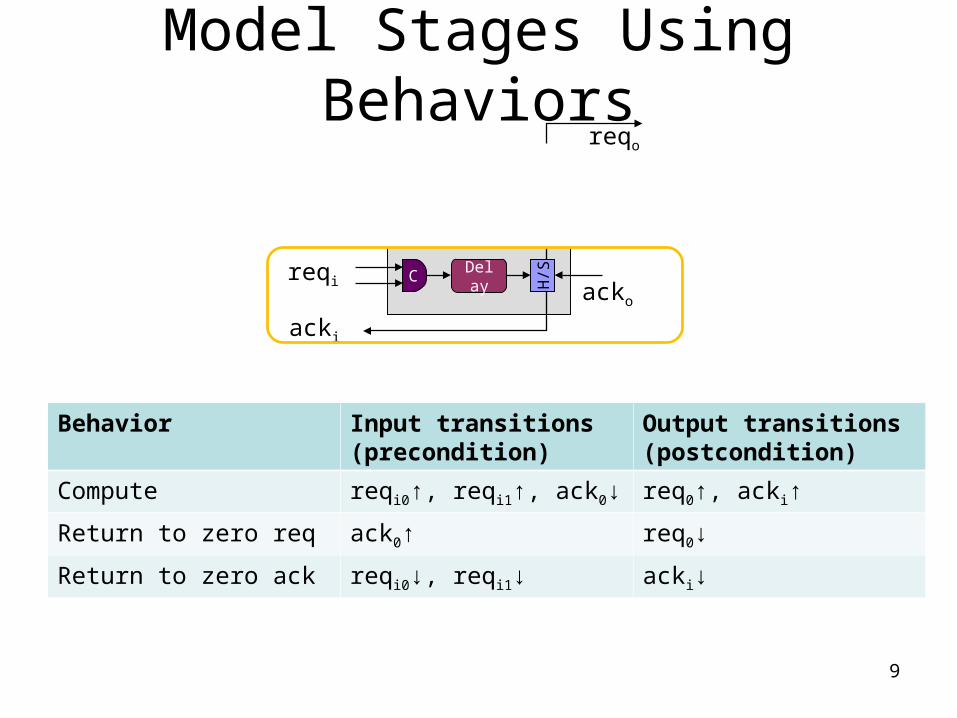
Model Stages Using Behaviors
+ reg
Delay
C H/S
data
reqi
acki
acko
reqo
Behavior Input transitions (precondition)
Output transitions(postcondition)
Compute reqi0↑, reqi1↑, ack0↓ req0↑, acki↑
Return to zero req ack0↑ req0↓
Return to zero ack reqi0↓, reqi1↓ acki↓
9

Behaviors can Handle Choice
mux arbiter
Deterministic (unique)choice
Nondeterministicchoice
10
In the absence of choice and non-deterministic delays a static analysis can determine the GCP.
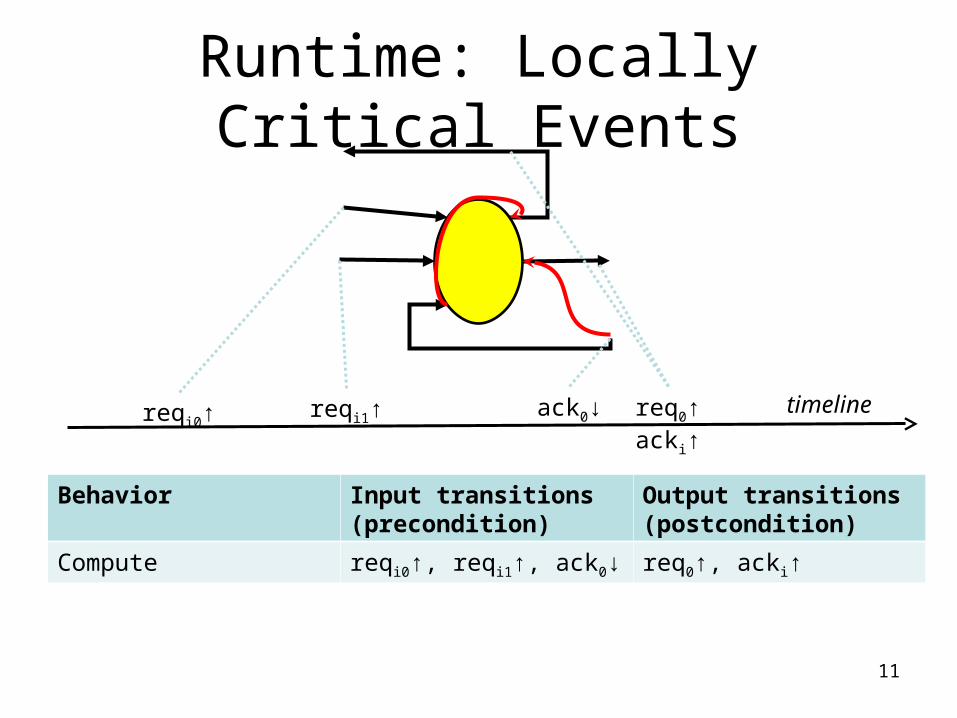
Runtime: Locally Critical Events
Behavior Input transitions (precondition)
Output transitions(postcondition)
Compute reqi0↑, reqi1↑, ack0↓ req0↑, acki↑
Return to zero req ack0↑ req0↓
Return to zero ack reqi0↓, reqi1↓ acki↓
timelinereqi0↑ reqi1↑ ack0↓ req0↑acki↑
11

GCP Computation Algorithm
12
3. Some transitions repeated
2. Trace back along locally critical input event
1. Start from last nodeexecuted
0. At run-time each node records locally critical events

Possible Locally Critical Paths
13
acko↓
req0↑reqi↑
acki↓
reqi ↓
acko↑
req0↓acko↓
acki ↑
reqi ↑
1 2
3 4

Chaining Events Backwards
14
acko↓
req0↑reqi↑
acki↓
reqi ↓
2
1
acko↓
req0↑reqi↑
1
acko↑
req0↓3
acko↓
acki ↑
reqi ↑
4
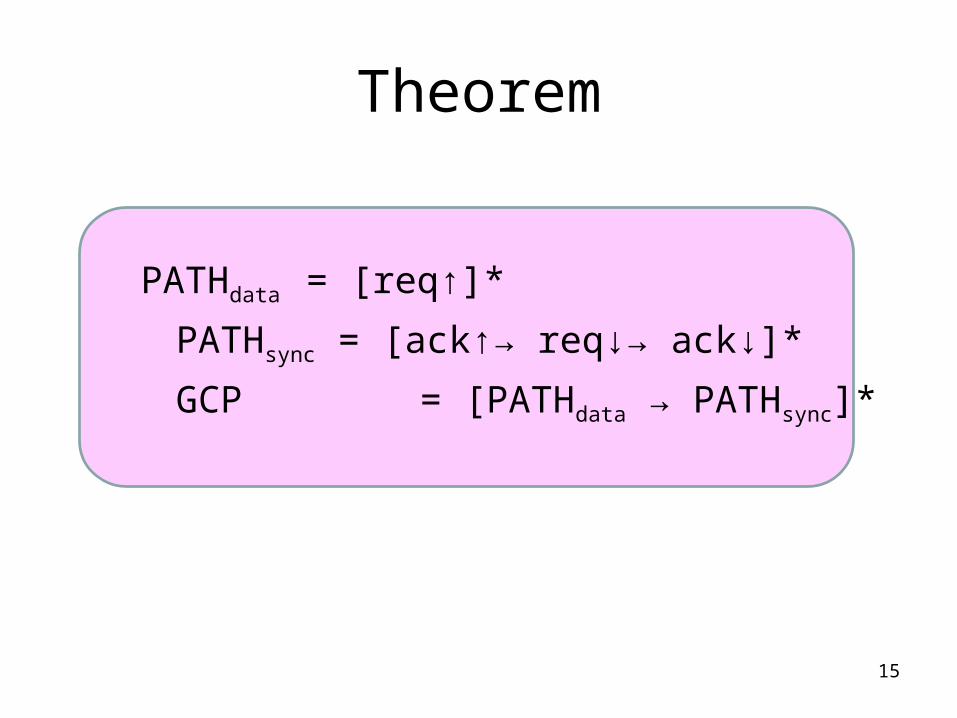
PATHdata = [req↑]*
PATHsync = [ack↑→ req↓→ ack↓]*
GCP = [PATHdata → PATHsync]*
Theorem
15

What does this mean?
16
PATHdata = [req↑]*
Good: wait for data
PATHsync = [ack↑→ req↓→ ack↓]*
Maybe bad: synchronization problem
GCP = [PATHdata → PATHsync]*
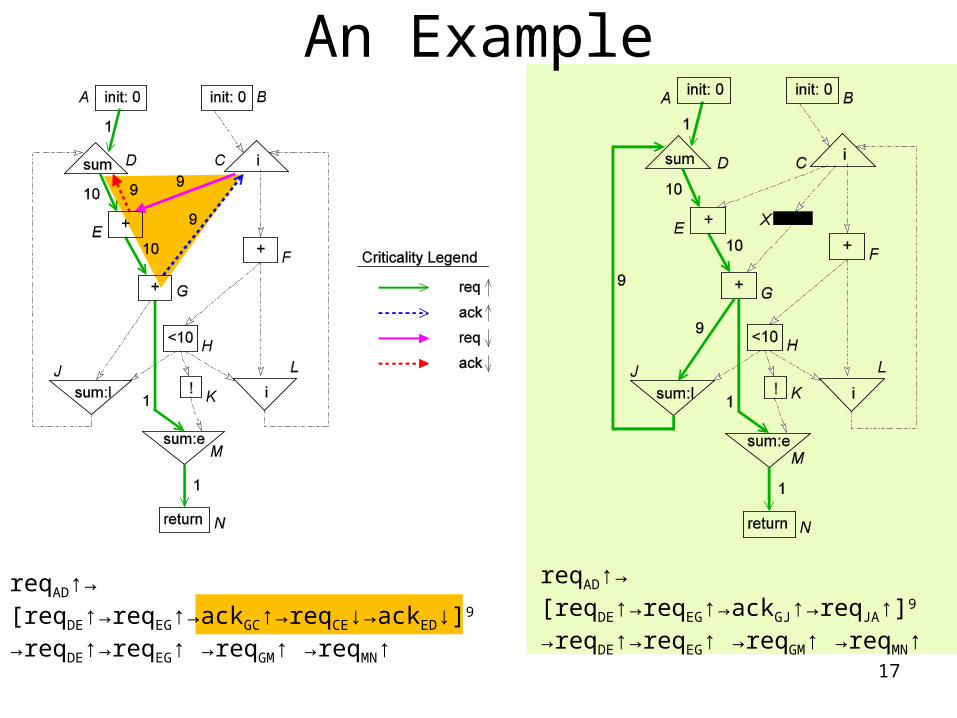
An Example
17
reqAD↑→ [reqDE↑→reqEG↑→ackGC↑→reqCE↓→ackED↓]9
→reqDE↑→reqEG↑ →reqGM↑ →reqMN↑
reqAD↑→ [reqDE↑→reqEG↑→ackGJ↑→reqJA↑]9
→reqDE↑→reqEG↑ →reqGM↑ →reqMN↑

C
CASHcore
Verilog back-end
Synopsys,Cadence P/R
asynchronouscircuitlayout
ModelSim
Input data
Executiontrace
GCPextraction
Feedback path
Critical Path ToolflowGCP
P/Rmodel
PLI calls
18

Effectiveness
19
0
10
20
30
40
50
60
70
80
GMMediabench kernels
Imp
rov
em
en
t (%
)
Time
Energy-Delay

• Is defined as a path on the timed graph.
• Tracks dependences.
• Can be computed by automatic tools.
• Summarizes concurrent computation bottlenecks.
• Can be incorporated in a feedback loop. to drive optimizations and de-optimizations.
• Is a profiling (input-dependent) concept.
Conclusions: Global Critical Path
20
t0 t1 t2 t3