Microelectromechanical Systems (MEMs) Applications ... · 1-21-2005 mem_app_legs.ppt...
36
© Jan 21, 2005 Dr. Lynn Fuller, Motorola Professor Rochester Institute of Technology Microelectronic Engineering MEMs Applications – Actuators, Legs & Wings Page 1 ROCHESTER INSTITUTE OF TEHNOLOGY MICROELECTRONIC ENGINEERING 1-21-2005 mem_app_legs.ppt Microelectromechanical Systems (MEMs) Applications – Actuators, Legs and Wings Dr. Lynn Fuller Motorola Professor Microelectronic Engineering Rochester Institute of Technology 82 Lomb Memorial Drive Rochester, NY 14623-5604 Tel (716) 475-2035 Fax (716) 475-5041 [email protected] http://www.microe.rit.edu
Transcript of Microelectromechanical Systems (MEMs) Applications ... · 1-21-2005 mem_app_legs.ppt...
© Jan 21, 2005 Dr. Lynn Fuller, Motorola Professor
Rochester Institute of TechnologyMicroelectronic Engineering
MEMs Applications – Actuators, Legs & Wings
Page 1
ROCHESTER INSTITUTE OF TEHNOLOGYMICROELECTRONIC ENGINEERING
1-21-2005 mem_app_legs.ppt
Microelectromechanical Systems (MEMs)Applications – Actuators, Legs and Wings
Dr. Lynn Fuller
Motorola Professor Microelectronic Engineering
Rochester Institute of Technology82 Lomb Memorial Drive
Rochester, NY 14623-5604Tel (716) 475-2035Fax (716) [email protected]
http://www.microe.rit.edu
© Jan 21, 2005 Dr. Lynn Fuller, Motorola Professor
Rochester Institute of TechnologyMicroelectronic Engineering
MEMs Applications – Actuators, Legs & Wings
Page 2
REVIEW
Actuators
ThermalTwo beam heated cantileverHeaters on PolyimideBimetalicHeater in an Enclosed Volume
ElectrostaticCapacitor Plate DriveComb DriveRelay/SwitchDiaphragm
PeizoelectricZnO
© Jan 21, 2005 Dr. Lynn Fuller, Motorola Professor
Rochester Institute of TechnologyMicroelectronic Engineering
MEMs Applications – Actuators, Legs & Wings
Page 3
OUTLINE
Polycrystalline Silicon Thermal Actuators Integrated with Photodetector Position Sensors
Electrostatic Impact-Drive Microactuator
A Walking Silicon Micro-Robot
MEMs Wing Technology for a Battery-Powered Ornithopter
© Jan 21, 2005 Dr. Lynn Fuller, Motorola Professor
Rochester Institute of TechnologyMicroelectronic Engineering
MEMs Applications – Actuators, Legs & Wings
Page 4
POLYCRYSTALLINE SILICON THERMAL ACTUATORS
Polycrystalline Silicon Thermal Actuators Integrated with Photodetector
Position Sensors
Kevin Munger
© Jan 21, 2005 Dr. Lynn Fuller, Motorola Professor
Rochester Institute of TechnologyMicroelectronic Engineering
MEMs Applications – Actuators, Legs & Wings
Page 5
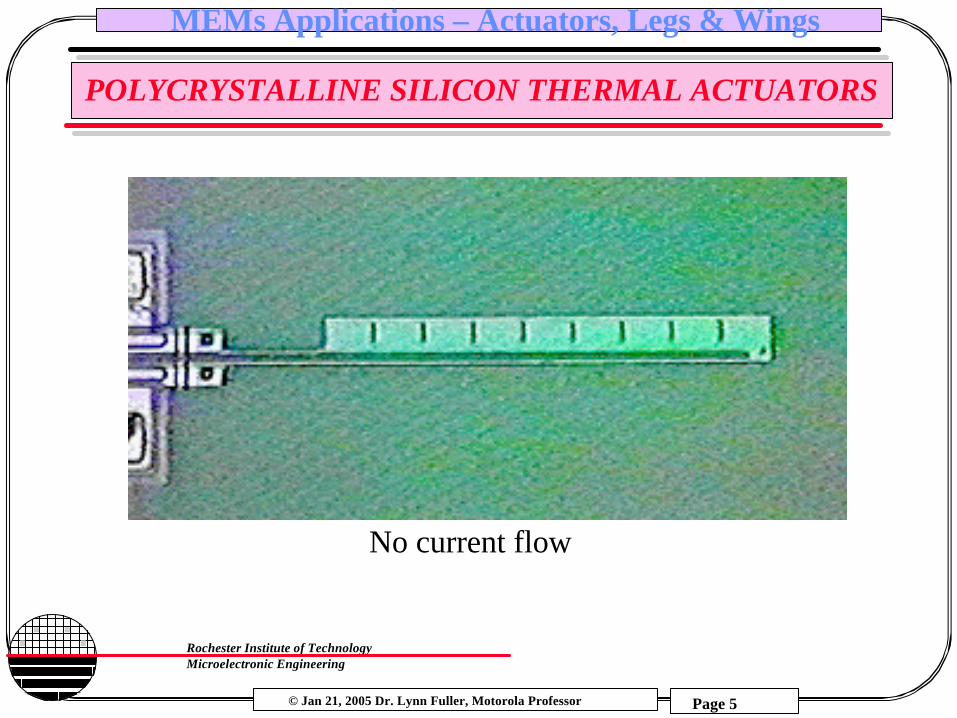
POLYCRYSTALLINE SILICON THERMAL ACTUATORS
No current flow
© Jan 21, 2005 Dr. Lynn Fuller, Motorola Professor
Rochester Institute of TechnologyMicroelectronic Engineering
MEMs Applications – Actuators, Legs & Wings
Page 6
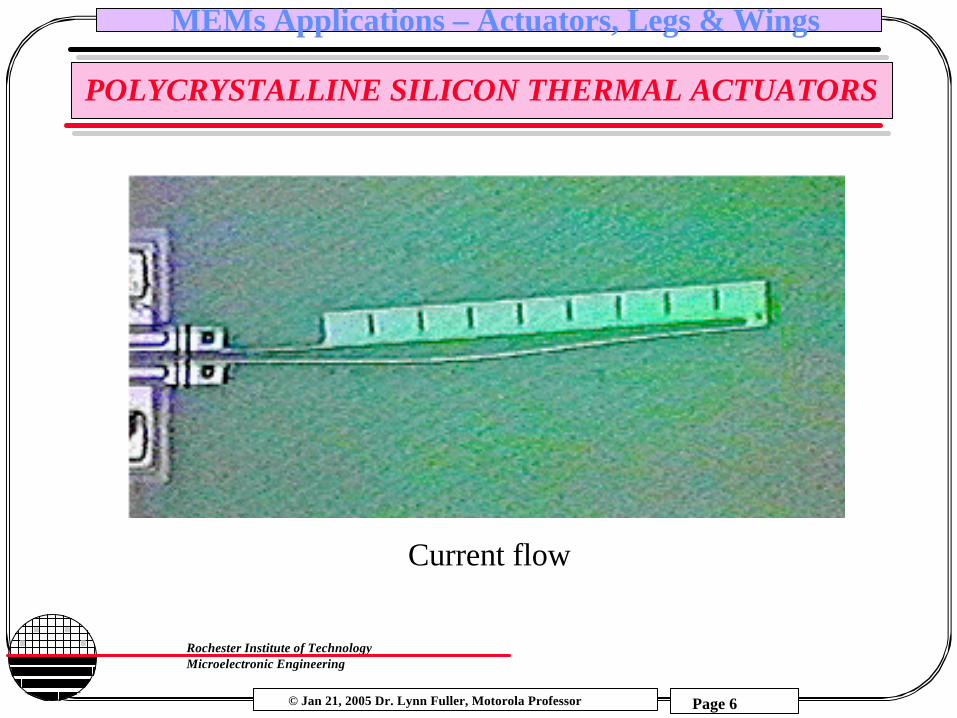
POLYCRYSTALLINE SILICON THERMAL ACTUATORS
Current flow
© Jan 21, 2005 Dr. Lynn Fuller, Motorola Professor
Rochester Institute of TechnologyMicroelectronic Engineering
MEMs Applications – Actuators, Legs & Wings
Page 7
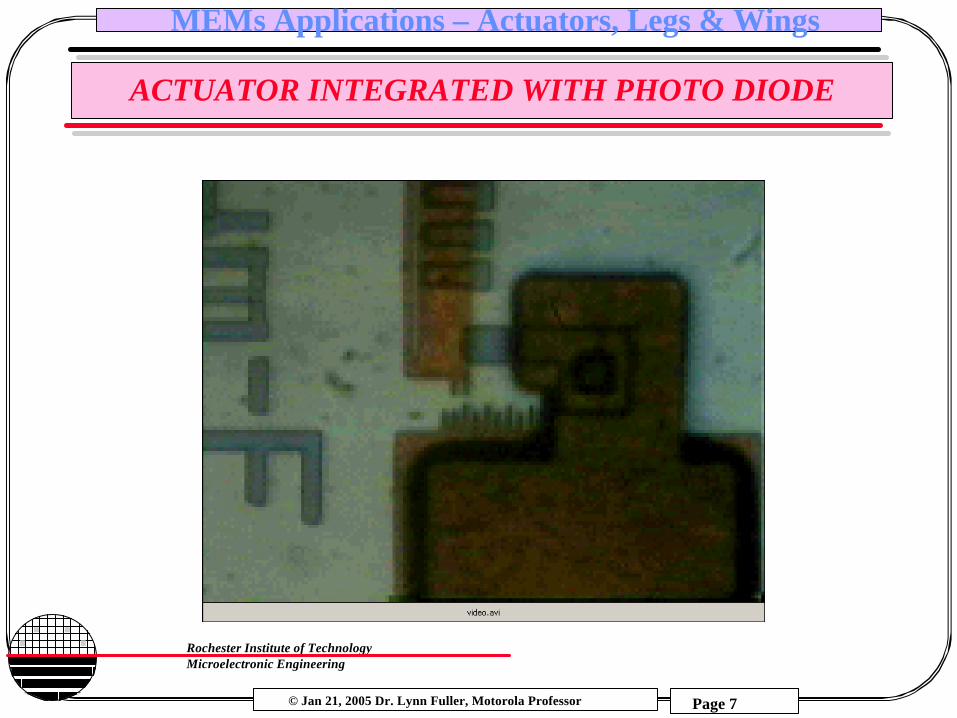
ACTUATOR INTEGRATED WITH PHOTO DIODE
© Jan 21, 2005 Dr. Lynn Fuller, Motorola Professor
Rochester Institute of TechnologyMicroelectronic Engineering
MEMs Applications – Actuators, Legs & Wings
Page 8
POLYCRYSTALLINE SILICON THERMAL ACTUATORS
SummaryThese devices give large mechanical motion on the order of several to few 10’s of micrometers
These devices are analog
Integrated with analog photodiode position detectioncan give feedback for accurate position
Cycle fatigue seems to be infinite
© Jan 21, 2005 Dr. Lynn Fuller, Motorola Professor
Rochester Institute of TechnologyMicroelectronic Engineering
MEMs Applications – Actuators, Legs & Wings
Page 9
ELECTROSTATIC IMPACT-DRIVE MICROACTUATOR
© Jan 21, 2005 Dr. Lynn Fuller, Motorola Professor
Rochester Institute of TechnologyMicroelectronic Engineering
MEMs Applications – Actuators, Legs & Wings
Page 10
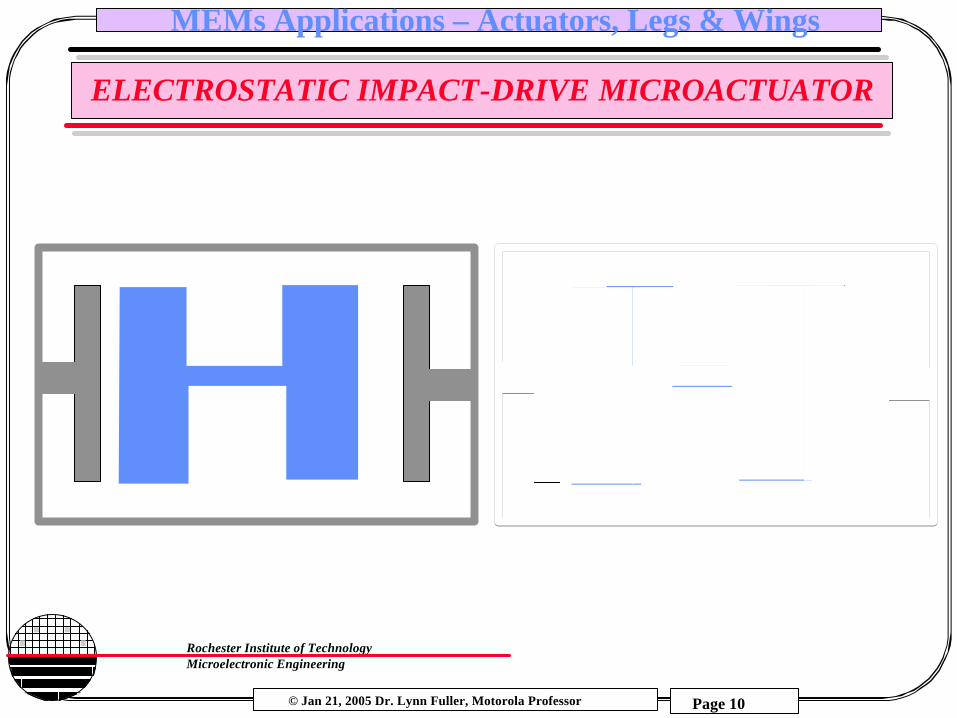
ELECTROSTATIC IMPACT-DRIVE MICROACTUATOR
© Jan 21, 2005 Dr. Lynn Fuller, Motorola Professor
Rochester Institute of TechnologyMicroelectronic Engineering
MEMs Applications – Actuators, Legs & Wings
Page 11
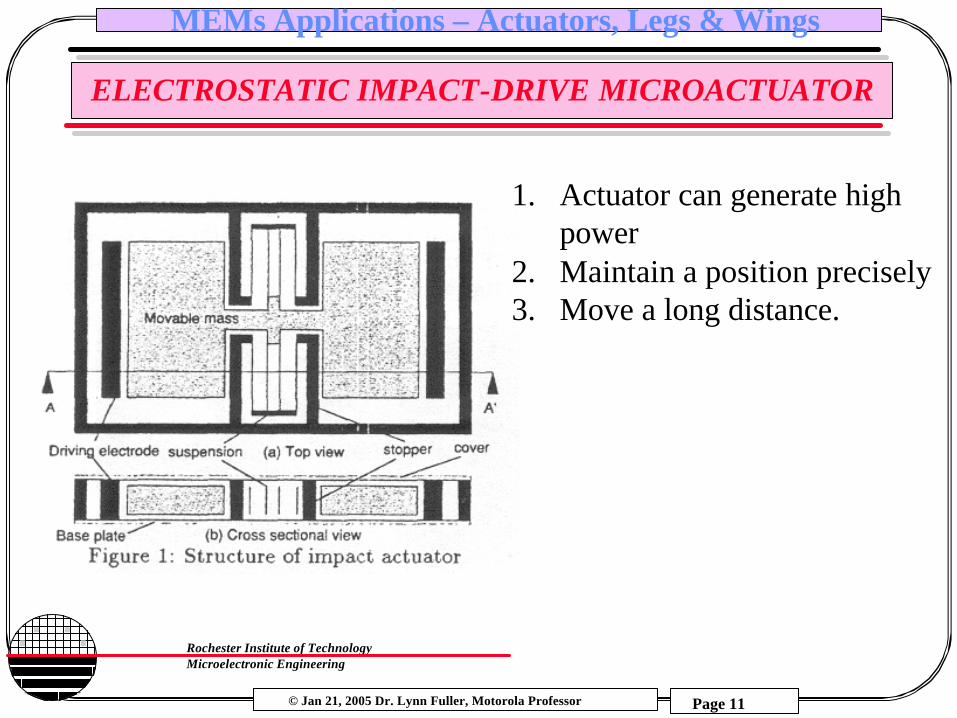
ELECTROSTATIC IMPACT-DRIVE MICROACTUATOR
1. Actuator can generate high power
2. Maintain a position precisely3. Move a long distance.
© Jan 21, 2005 Dr. Lynn Fuller, Motorola Professor
Rochester Institute of TechnologyMicroelectronic Engineering
MEMs Applications – Actuators, Legs & Wings
Page 12
ELECTROSTATIC IMPACT-DRIVE MICROACTUATOR
© Jan 21, 2005 Dr. Lynn Fuller, Motorola Professor
Rochester Institute of TechnologyMicroelectronic Engineering
MEMs Applications – Actuators, Legs & Wings
Page 13
ELECTROSTATIC IMPACT-DRIVE MICROACTUATOR
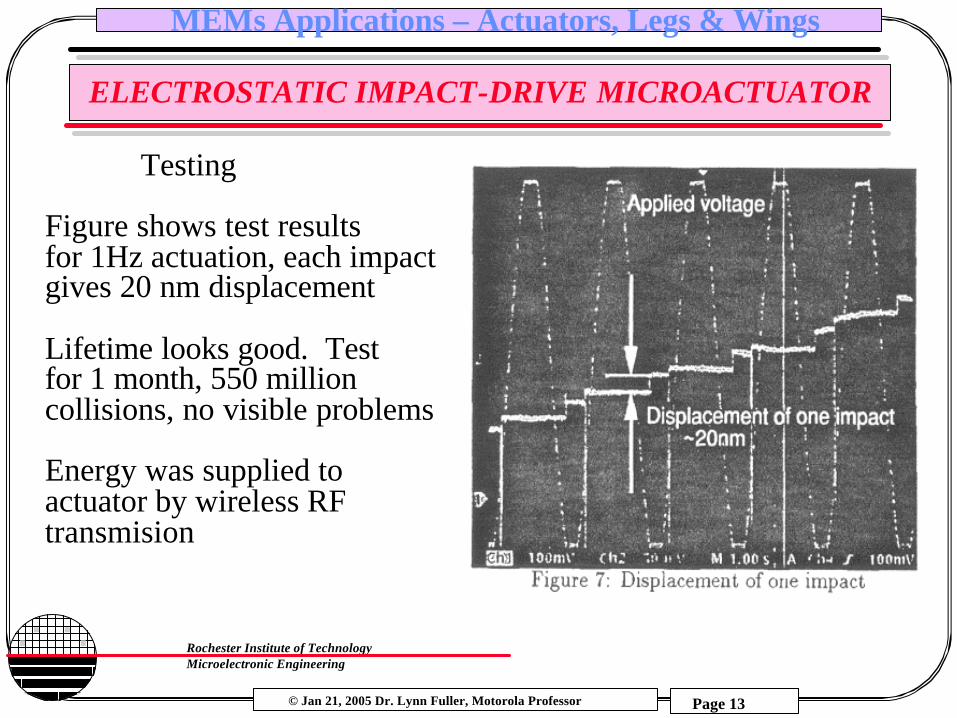
Testing
Figure shows test resultsfor 1Hz actuation, each impactgives 20 nm displacement
Lifetime looks good. Testfor 1 month, 550 million collisions, no visible problems
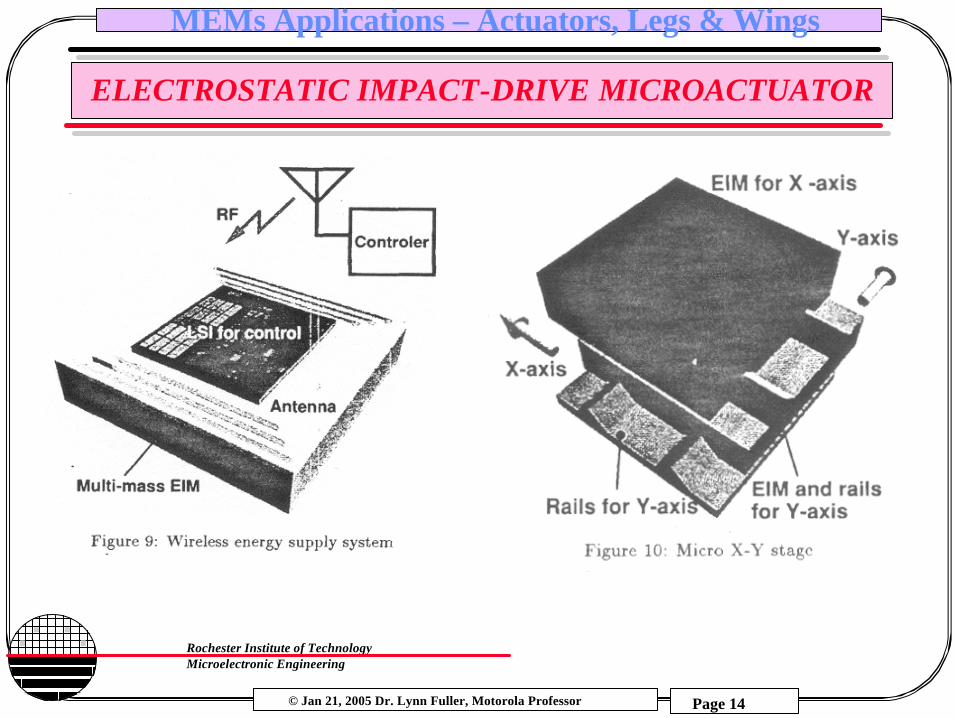
Energy was supplied to actuator by wireless RF transmision
© Jan 21, 2005 Dr. Lynn Fuller, Motorola Professor
Rochester Institute of TechnologyMicroelectronic Engineering
MEMs Applications – Actuators, Legs & Wings
Page 14
ELECTROSTATIC IMPACT-DRIVE MICROACTUATOR
© Jan 21, 2005 Dr. Lynn Fuller, Motorola Professor
Rochester Institute of TechnologyMicroelectronic Engineering
MEMs Applications – Actuators, Legs & Wings
Page 15
ELECTROSTATIC IMPACT-DRIVE MICROACTUATOR
ConclusionA New type of actuator is describedDiven by electrostatic force~15 nm per impact at 100 VoltsSpeed of 2.7 um/sec at 200 HzLife greater than 550 million impacts
© Jan 21, 2005 Dr. Lynn Fuller, Motorola Professor
Rochester Institute of TechnologyMicroelectronic Engineering
MEMs Applications – Actuators, Legs & Wings
Page 16
A WALKING SILICON MICRO-ROBOT
© Jan 21, 2005 Dr. Lynn Fuller, Motorola Professor
Rochester Institute of TechnologyMicroelectronic Engineering
MEMs Applications – Actuators, Legs & Wings
Page 17
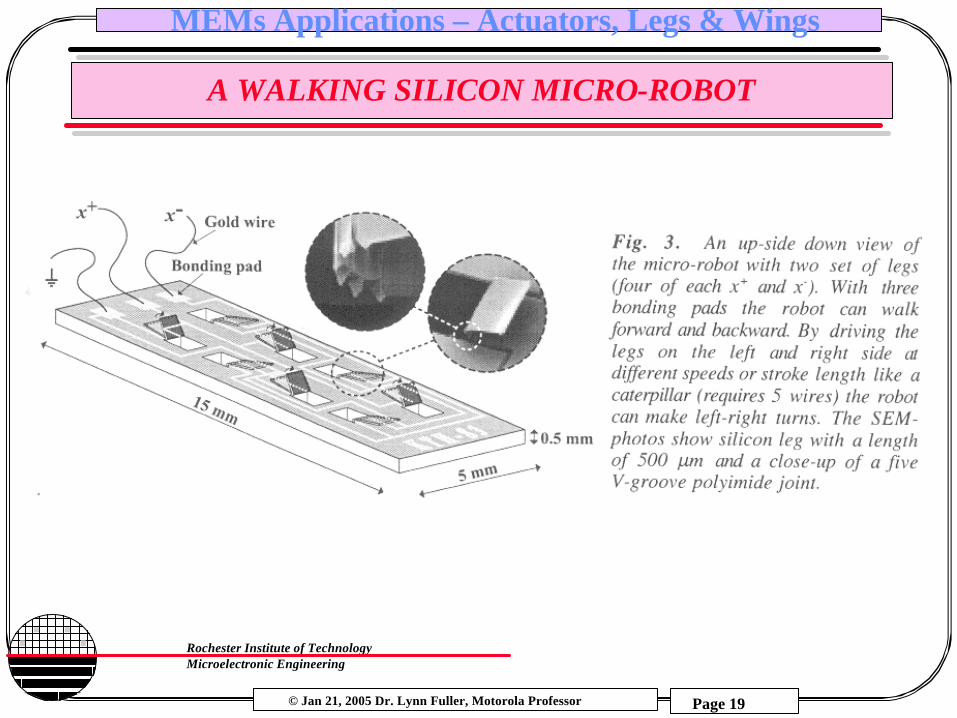
A WALKING SILICON MICRO-ROBOT
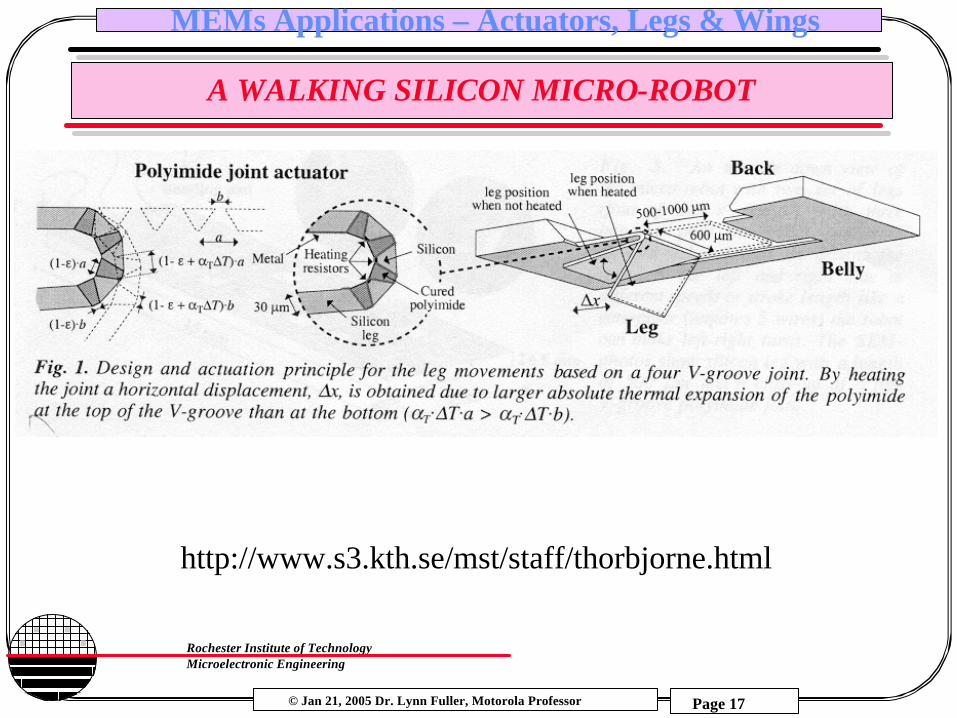
http://www.s3.kth.se/mst/staff/thorbjorne.html
© Jan 21, 2005 Dr. Lynn Fuller, Motorola Professor
Rochester Institute of TechnologyMicroelectronic Engineering
MEMs Applications – Actuators, Legs & Wings
Page 18
A WALKING SILICON MICRO-ROBOT
© Jan 21, 2005 Dr. Lynn Fuller, Motorola Professor
Rochester Institute of TechnologyMicroelectronic Engineering
MEMs Applications – Actuators, Legs & Wings
Page 19
A WALKING SILICON MICRO-ROBOT
© Jan 21, 2005 Dr. Lynn Fuller, Motorola Professor
Rochester Institute of TechnologyMicroelectronic Engineering
MEMs Applications – Actuators, Legs & Wings
Page 20
A WALKING SILICON MICRO-ROBOT
© Jan 21, 2005 Dr. Lynn Fuller, Motorola Professor
Rochester Institute of TechnologyMicroelectronic Engineering
MEMs Applications – Actuators, Legs & Wings
Page 21
A WALKING SILICON MICRO-ROBOT
© Jan 21, 2005 Dr. Lynn Fuller, Motorola Professor
Rochester Institute of TechnologyMicroelectronic Engineering
MEMs Applications – Actuators, Legs & Wings
Page 22
A WALKING SILICON MICRO-ROBOT
© Jan 21, 2005 Dr. Lynn Fuller, Motorola Professor
Rochester Institute of TechnologyMicroelectronic Engineering
MEMs Applications – Actuators, Legs & Wings
Page 23
MEMS WING TECHNOLOGY
© Jan 21, 2005 Dr. Lynn Fuller, Motorola Professor
Rochester Institute of TechnologyMicroelectronic Engineering
MEMs Applications – Actuators, Legs & Wings
Page 24
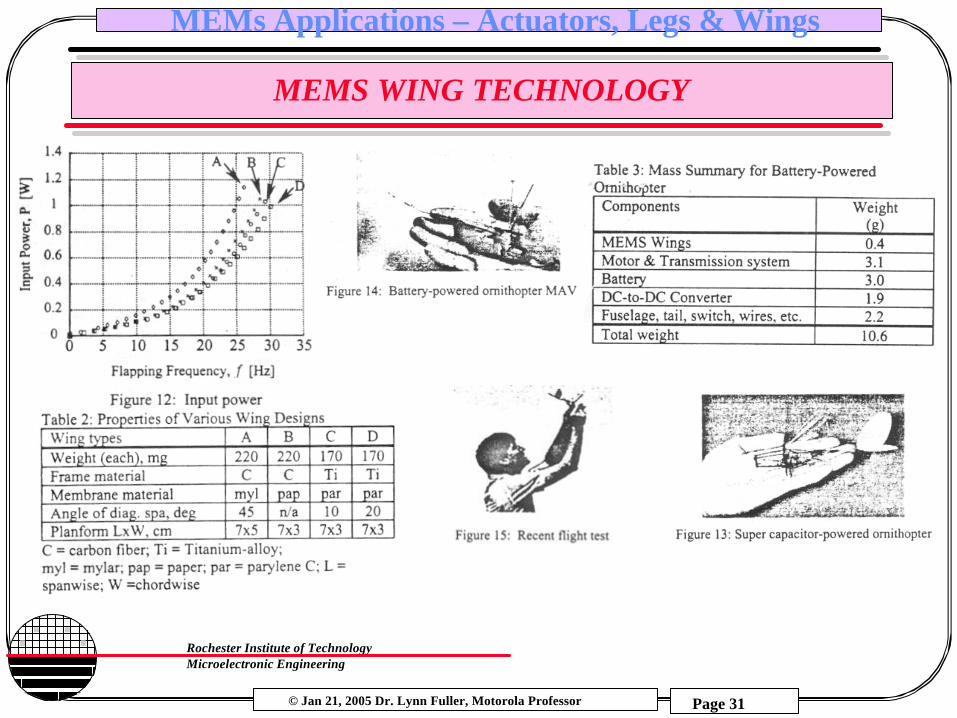
MEMS WING TECHNOLOGY
INTRODUCTIONProject constraints:
1) wingspan must be less than 15 cm, definition of MAV. 2) the flyer must fly by flapping its wings, ornithopter
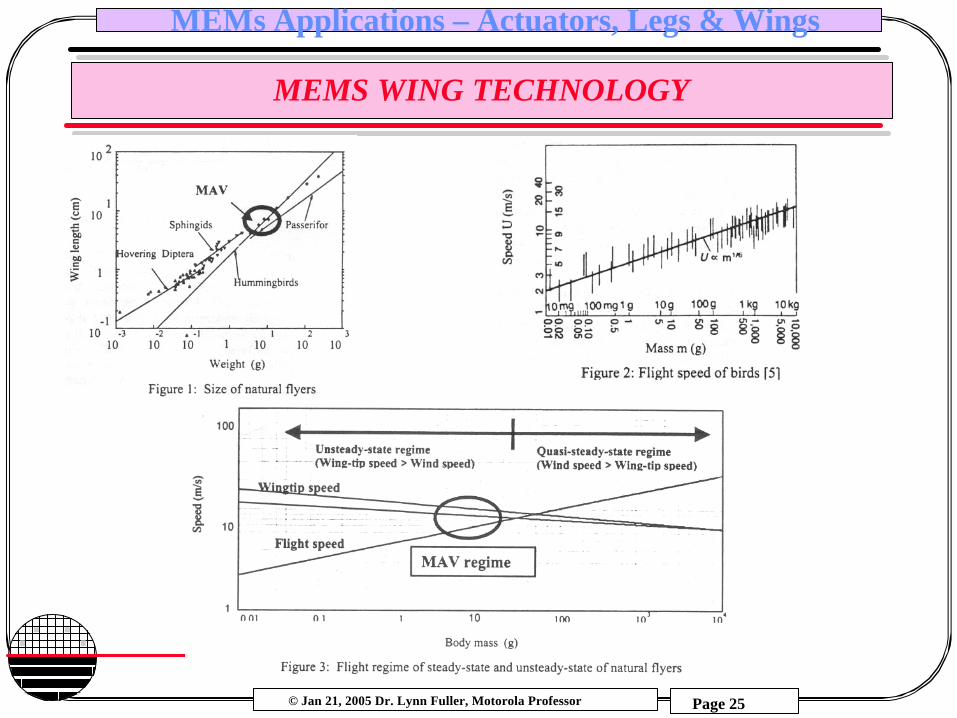
A MAV falls within the size range of small birds, bats, and large insects, natural flyers, They will try to mimic them. Estimated a final 7-10 grams size. Estimated unsteady-state regime of flight where wing-tip speed is greater than the wind speed. Thus the wing must be light and strong, withstand high flapping frequencywithout breaking and generate lift and thrust to fly the prototype
© Jan 21, 2005 Dr. Lynn Fuller, Motorola Professor
Rochester Institute of TechnologyMicroelectronic Engineering
MEMs Applications – Actuators, Legs & Wings
Page 25
MEMS WING TECHNOLOGY
© Jan 21, 2005 Dr. Lynn Fuller, Motorola Professor
Rochester Institute of TechnologyMicroelectronic Engineering
MEMs Applications – Actuators, Legs & Wings
Page 26
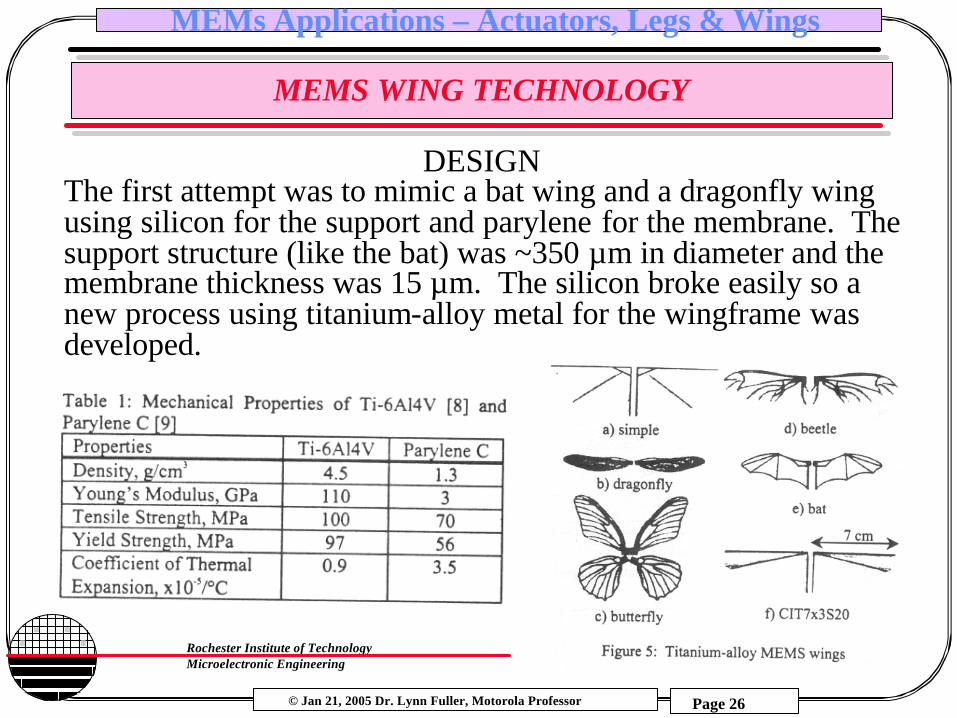
MEMS WING TECHNOLOGY
DESIGNThe first attempt was to mimic a bat wing and a dragonfly wing using silicon for the support and parylene for the membrane. The support structure (like the bat) was ~350 µm in diameter and the membrane thickness was 15 µm. The silicon broke easily so a new process using titanium-alloy metal for the wingframe was developed.
© Jan 21, 2005 Dr. Lynn Fuller, Motorola Professor
Rochester Institute of TechnologyMicroelectronic Engineering
MEMs Applications – Actuators, Legs & Wings
Page 27
APPLY PARYLENE
Approximately 1 gm of Parylene C gives ~3000Å film thickness, Deposit 5 wafers per run.
See: http://www.scscookson.com/parylene/properties.cfm
Adhesion Promotor(gammamethacryloxypropyltrimethoxysilane)
spin coat 3000 rpm 1 min. Bake 110 C for 2 min. Then load into Parylene Deposition Tool.
© Jan 21, 2005 Dr. Lynn Fuller, Motorola Professor
Rochester Institute of TechnologyMicroelectronic Engineering
MEMs Applications – Actuators, Legs & Wings
Page 28
MEMS WING TECHNOLOGY
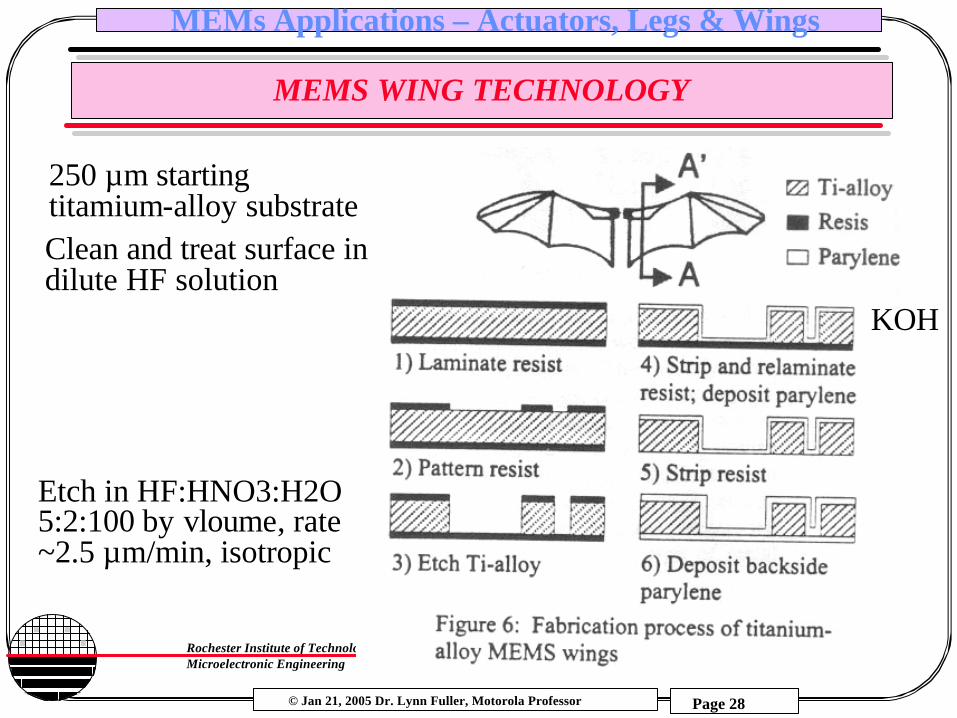
250 µm starting titamium-alloy substrate
Etch in HF:HNO3:H2O5:2:100 by vloume, rate ~2.5 µm/min, isotropic
Clean and treat surface in dilute HF solution
KOH
© Jan 21, 2005 Dr. Lynn Fuller, Motorola Professor
Rochester Institute of TechnologyMicroelectronic Engineering
MEMs Applications – Actuators, Legs & Wings
Page 29
MEMS WING TECHNOLOGY
© Jan 21, 2005 Dr. Lynn Fuller, Motorola Professor
Rochester Institute of TechnologyMicroelectronic Engineering
MEMs Applications – Actuators, Legs & Wings
Page 30
MEMS WING TECHNOLOGY
© Jan 21, 2005 Dr. Lynn Fuller, Motorola Professor
Rochester Institute of TechnologyMicroelectronic Engineering
MEMs Applications – Actuators, Legs & Wings
Page 31
MEMS WING TECHNOLOGY
© Jan 21, 2005 Dr. Lynn Fuller, Motorola Professor
Rochester Institute of TechnologyMicroelectronic Engineering
MEMs Applications – Actuators, Legs & Wings
Page 32
MEMS WING TECHNOLOGY

© Jan 21, 2005 Dr. Lynn Fuller, Motorola Professor
Rochester Institute of TechnologyMicroelectronic Engineering
MEMs Applications – Actuators, Legs & Wings
Page 33
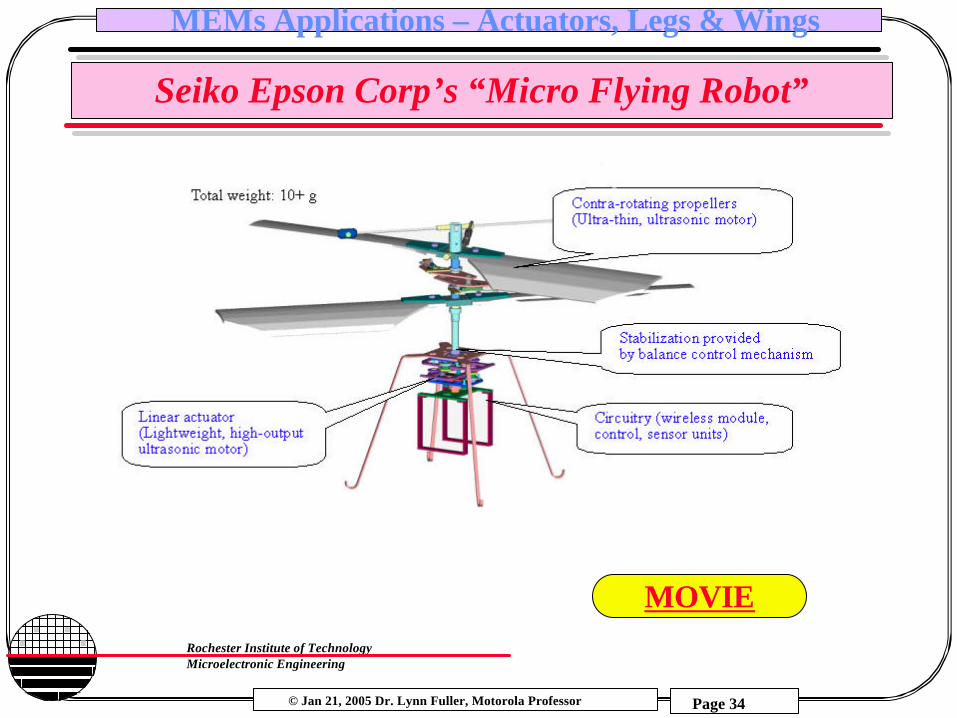
Seiko Epson Corp’s “Micro Flying Robot”
NEWS RELEASE
© Jan 21, 2005 Dr. Lynn Fuller, Motorola Professor
Rochester Institute of TechnologyMicroelectronic Engineering
MEMs Applications – Actuators, Legs & Wings
Page 34
Seiko Epson Corp’s “Micro Flying Robot”
MOVIE
© Jan 21, 2005 Dr. Lynn Fuller, Motorola Professor
Rochester Institute of TechnologyMicroelectronic Engineering
MEMs Applications – Actuators, Legs & Wings
Page 35
REFERENCES
1. “Microsensors,” Muller, Howe, Senturia, Smith and White, IEEE Press, NY, NY 1991.
2. “Sensor Technology and Devices,” Ristic, L.J., Artech House, London, 1994.
3. IEEE Journal of Microelectromechanical Systems4. “Electrostatic Impact-Drive Microactuator”, M.Mita, et.el.,
University of Tokyo, IEEE, 20015. “A walking Silicon Micro-Robot”, Thorbjorn Ebefors, et.el.,
Department of signals, sensors and Systems, Royal Institute of technology, Stockholm, Sweden, 10th Int. conference on solid-State Sensors and Actuators, Sendai Japan, June 7-10, 1999.
6. MEMs Wing Technology for a battery-Powered Ornithopter, T. Nick Pornsin-sirirak, Caltech Micromachining Laboratory, Pasadena, CA, 91125, IEEE, 2000.
© Jan 21, 2005 Dr. Lynn Fuller, Motorola Professor
Rochester Institute of TechnologyMicroelectronic Engineering
MEMs Applications – Actuators, Legs & Wings
Page 36
HW – APPLICATIONS MICROPHONES
1. Find another publication describing the fabrication of a MEMsactuator, robot or flying machine. Describe the fabrication sequence in your own words. Attach a copy of the paper.