
Metoda Elementului Finit - curs
43
Metoda elementului finit (MEF) "Although the finite element method can make a good engineer better, it can make a poor engineer more dangerous..... One can now make mistakes with more confidence than ever before.“ “In timp ce metoda elementului finit poate face ca un inginer bun sa devina mai bun, ea poate face ca un inginer slab sa devina mai periculos … Se pot face greşeli cu mai multă încredere decât până acum. ” R. Cook Definitie Metoda elementelor finite (MEF) este o metodǎ generalǎ de rezolvare aproximativǎ a ecuaţiilor diferenţiale cu derivate parţiale care descriu sau nu fenomene fizice. MEF a devinit unul dintre cele mai “puternice” instrumente in rezolvarea problemelor ingineresti. Principial MEF constǎ în descompunerea domeniului de analiză în porţiuni de formă geometrică simplă, analiza acestora şi recompunerea domeniului respectând anumite cerinţe matematice. Domeniu de aplicare Din punct de vedere al domeniilor de aplicaţie metoda poate fi extinsǎ în orice domeniu de activitate care descrie un fenomen cu ajutorul unor ecuaţii diferenţiale. Panǎ în prezent metoda s-a dezvoltat în mod deosebit în domenii ca: analiza structuralǎ; analiza termicǎ; analiza fluidelor; analiza electricǎ; analiza magneticǎ, Precursori FEA Hrennikoff, A. P., 1940. Plane stress and bending of plates by method of articulated framework. Teza de doctorat, MIT, Boston. Analogia de grinda cu zabrele Analogia Hrennikoff imparte spatiul continuu in puncte legate prin intermediul unor zabrele. Caracteristicile geometrice sunt calculate impunand conditia ca deplasarile nodurilor grinzii cu zabrele sa fie identice cele ale cu corpului continuu (nodurile de colt). Au fost studiate elemente spatiale de tip: cub si de suprafata: triungni echilateral, dreptunghi si patrat. 1
description
Curs metoda elementului finit
Transcript of Metoda Elementului Finit - curs
1/12/2010
1
Metoda elementului finit (MEF) "Although the finite element
method can make a good engineer better, it can make a poor engineer more dangerous..... One can now make mistakes with more confidence than ever before.“
“In timp ce metoda elementului finit poate face ca un inginer bun sa devina mai bun, ea poate face ca un inginer slab sa devina mai periculos … Se pot face greşeli cu mai multă încredere decât până acum. ”
R. Cook
Definitie
Metoda elementelor finite (MEF) este o metodǎgeneralǎ de rezolvare aproximativǎ a ecuaţiilor diferenţiale cu derivate parţiale care descriu sau nu fenomene fizice.
MEF a devinit unul dintre cele mai “puternice” instrumente in rezolvarea problemelor ingineresti.
Principial MEF constǎ în descompunerea domeniului de analiză în porţiuni de
formă geometrică simplă, analiza acestora şi recompunerea domeniului respectând anumite cerinţe
matematice.
Domeniu de aplicare
Din punct de vedere al domeniilor de aplicaţie metoda poate fi extinsǎ în orice domeniu de activitate care descrie un fenomen cu ajutorul unor ecuaţii diferenţiale.
Panǎ în prezent metoda s-a dezvoltat în mod deosebit în domenii ca: analiza structuralǎ;
analiza termicǎ;
analiza fluidelor; analiza electricǎ;
analiza magneticǎ,
Precursori FEA
Hrennikoff, A. P., 1940. Plane stress and bending of plates by method of articulated framework. Teza de doctorat, MIT, Boston.
Analogia de grinda cu zabrele
Analogia
Hrennikoff imparte spatiul continuu in puncte legate prin intermediul unor zabrele. Caracteristicile geometrice sunt calculate impunand conditia ca deplasarile nodurilor grinzii cu zabrele sa fie identice cele ale cu corpului continuu (nodurile de colt).
Au fost studiate elemente spatiale de tip: cub si de suprafata: triungni echilateral, dreptunghi si patrat.
1
1/12/2010
2
Precursori FEA
Arhimede (circa 250 B.C.) determina numarul prin “modelarea” unui cerc printr-un poligon regulat inscris.
Precursori FEA
Euler a impartit intervalul de definitie a unei functii uni-dimensionale in intervale finite pe care variatia este presupusa liniara, definite prin valorile la capete
Precursori FEA
1942 - Richard Courant (NYU) studiază răsucirea - problema Saint Venant, prin discretizare cu triunghiuri
1950-1962 Pionierii
1953 – 1959 se formulează şi definitivează metoda deplasărilor către de M.J. Turner (seful diviziei Structural Dynamics Unit Boeing).
Turner, M. J., Clough, R. W., Martin, H. C., Topp, L. J., 1956. Stiffness and deflection analysis of complex structures. Journal of the Aeronautical Sciences, vol. 23, No. 9, pp. 805–823, 854.
1955 John H. Argyris sistematizeaza conceptul de asamblare a componentelor elementelor a unei structuri intr-un sistem de ecuatii.
1960 Primul care foloseste termenul de element finit este Raymond W. Clough (UC Berkeley)
1962-1970 Anii de aur
Fraeijs de Veubeke (1965) -Displacement and equilibrium models in the finite element method
O.C. ZIENKIEWICZ (with Y.K. CHEUNG), (1967) The Finite Element Method in Continuum and Structural Mechanics, McGraw Hill, 272 pp
Strang G., Fix G. (1973) – An Analysis of the Finite Element Method
2
1/12/2010
3
Programe FEA
1965 – 1972 MacNeal-Schwendler (MSC Software)+NASA
NASTRAN (NASA Structural Analysis System)
1965 – SAMCEF (Liege University)
Consolidarea 1970-1980
Oden T., (1972) –Finite elements nonliniar continua
Coduri comericiale FEM 1970 – ANSYS
1973 – SAP4
1975 – ADINA
1978 – ABAQUS
1985 – COSMOS-M
Perioada actuala
Elementele trebuie sa raspunda cerintelor DSM, tinand cont ca majoritatea programelor de calcul se bazeaza pe metoda deplasarilor
Pastrarea de elemente simple, dar care sa ofere o suficienta acuratete, chiar si in cazul unui mesh rar -“high performance elements” (1989)
Cunoştinţe necesare - Programator
MEF are un caracter pluridisciplinar.
Implementarea unor programe cu elemente finite pentru anumite tipuri de probleme sau chiar a unui program general de calcul în domeniul ingineriei, cu precǎdere pentru calcule ale structurilor de rezistenţǎ, impune stǎpanirea diciplinelor
Cunoştinţe necesare - Utilizator
Un utilizator – student –este pus în situaţia rezolvǎrii unei anumite
probleme şi nu în a implementa un program cu elemente finite pentru rezolvarea ei, de aceea utilizatorul trebuie sǎ afle dacǎ problema se preteazǎ rezolvǎrii cu MEF şi sǎfoloseascǎ un program adecvat
problemei respective.
Trebuie sǎ menţionǎm de la început cǎ programul de calcul folosit pentru analiza problemei nu rezolvǎ
structura reală, ci doar un MODEL al ei pe care în general îl face utilizatorul.
STRUCTURA DE CALCUL -> MODEL -> ANALIZĂ cu MEF
3
1/12/2010
4
Modelarea
Rezultatele pot fi confirmate sau nu, funcţie de cum a fost ales modelul de calcul.
Modelarea este o activitate de simplificare a structurii prin încadrarea diverselor porţiuni ale structurii în categoria barelor, plǎcilor, blocurilor, prin simplificarea incǎrcǎrilor şi a rezemǎrilor etc.
Modelarea corectǎ (cât mai aproape de realitate) ţine de cunoaşterea bazelor teoretice ale metodei şi de experienţǎ, inspiraţie. De regulă un model se dezvoltă funcţie de scopul analizei.
Odatǎ stabilit modelul de calcul, se impune pregǎtirea datelor de intrare
pentru rezolvarea problemei. Fiecare program cu elemente finite prezintǎparticularitǎti care trebuie invǎţate dar existǎ o serie de reguli de bazǎale metodei care odatǎ stǎpanite permite abordarea oricǎrui program
cu elemente finite.
Indiferent de metoda abordată, analiza unei structuri reale prezintă câteva etape esenţiale:
structura reală se identifică, prin folosirea unor ipoteze simplificatoare, cu un model fizic primar, numit “model conceptual”;
modelul primar serveşte la formularea unui “model matematic”, adică la un set de ecuaţii care urmează a fi rezolvate;
rezultatele obţinute sunt interpretate şi dacă există motive întemeiate acestea pot fi validate.
Astfel seria celor două modele conceptual şi matematic pot fi folosite şi pentru alte probleme similare.
Concepte de bază în MEF -introducere
Un domeniu solid oarecare, considerat plan numai din considerente de prezentare este raportat la un sistem de referinţă cartezian XOY, este încărcat cu o forţă F şi încastrat pe conturul din stânga. Fiecare punct al domeniului prezintă o deplasare pe direcţia OX, notată u(X,Y) şi una pe direcţia OY, v(X,Y).
Domeniul prezentat poate fi identificat cu un model de calcul conceptual, totuşi în continuare acesta se va numi structură.
Descrierea problemei
Problema prezentată reprezintă practic o bară de secţiune variabilă în consolă încărcată în capătul liber pentru care se caută soluţia, adică de exemplu săgeata şi tensiunea echivalentă maximă.
Din punct de vedere matematic, în teoria elasticităţii, problema prezentată este descrisă de un set de ecuaţii diferenţiale cu derivate parţiale şi de anumite condiţii la limită.
Pentru anumite cazuri particulare, adică forme geometrice simple şi încărcări bine alese, există soluţii analitice pentru expresiile câmpului deplasărilor şi al tensiunilor. În general problema nu se poate rezolva pe cale analitică.
MEF
Se menţionează că o rezolvare analitică prezintă
soluţii pentru o infinitate de puncte din domeniul de analiză. Se spune că domeniul de analiză reprezintă o
structură continuă.
O alternativă de a rezolva astfel de probleme o constituie metoda elementelor finite (MEF).
4
1/12/2010
5
Elemente finite
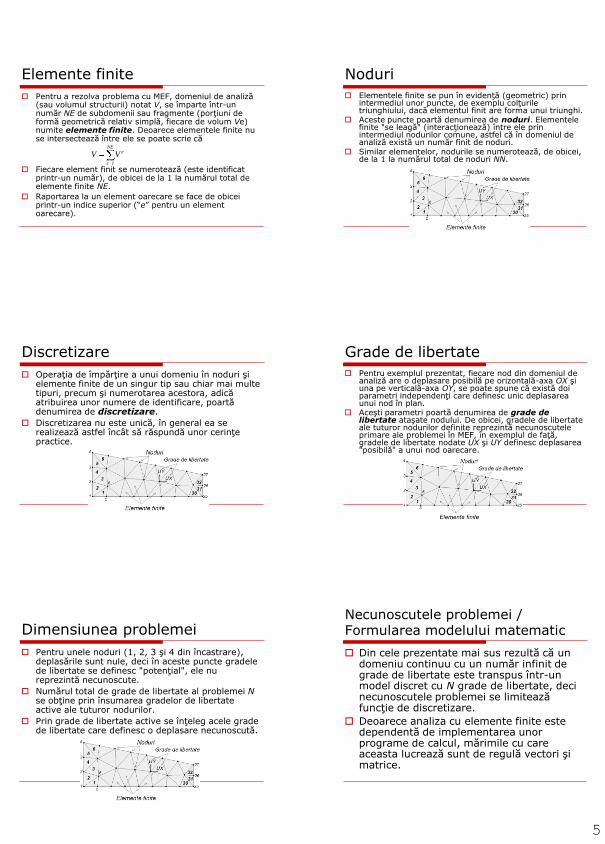
Pentru a rezolva problema cu MEF, domeniul de analiză (sau volumul structurii) notat V, se împarte într-un număr NE de subdomenii sau fragmente (porţiuni de formă geometrică relativ simplă, fiecare de volum Ve) numite elemente finite. Deoarece elementele finite nu se intersectează între ele se poate scrie că
Fiecare element finit se numerotează (este identificat printr-un număr), de obicei de la 1 la numărul total de elemente finite NE.
Raportarea la un element oarecare se face de obicei printr-un indice superior (“e” pentru un element oarecare).
NEe
e 1
V V
Noduri
Elementele finite se pun în evidenţă (geometric) prin intermediul unor puncte, de exemplu colţurile triunghiului, dacă elementul finit are forma unui triunghi.
Aceste puncte poartă denumirea de noduri. Elementele finite "se leagă" (interacţionează) între ele prin intermediul nodurilor comune, astfel că în domeniul de analiză există un număr finit de noduri.
Similar elementelor, nodurile se numerotează, de obicei, de la 1 la numărul total de noduri NN.
Discretizare
Operaţia de împărţire a unui domeniu în noduri şi elemente finite de un singur tip sau chiar mai multe tipuri, precum şi numerotarea acestora, adică atribuirea unor numere de identificare, poartă denumirea de discretizare.
Discretizarea nu este unică, în general ea se realizează astfel încât să răspundă unor cerinţe practice.
Grade de libertate
Pentru exemplul prezentat, fiecare nod din domeniul de analiză are o deplasare posibilă pe orizontală-axa OX şi una pe verticală-axa OY, se poate spune că există doi parametri independenţi care definesc unic deplasarea unui nod în plan.
Aceşti parametri poartă denumirea de grade de libertate ataşate nodului. De obicei, gradele de libertate ale tuturor nodurilor definite reprezintă necunoscutele primare ale problemei în MEF, în exemplul de faţă, gradele de libertate nodate UX şi UY definesc deplasarea "posibilă" a unui nod oarecare.
Dimensiunea problemei
Pentru unele noduri (1, 2, 3 şi 4 din încastrare), deplasările sunt nule, deci în aceste puncte gradele de libertate se definesc "potenţial", ele nu reprezintă necunoscute.
Numărul total de grade de libertate al problemei N se obţine prin însumarea gradelor de libertate active ale tuturor nodurilor.
Prin grade de libertate active se înţeleg acele grade de libertate care definesc o deplasare necunoscută.
Necunoscutele problemei / Formularea modelului matematic
Din cele prezentate mai sus rezultă că un domeniu continuu cu un număr infinit de grade de libertate este transpus într-un model discret cu N grade de libertate, deci necunoscutele problemei se limitează funcţie de discretizare.
Deoarece analiza cu elemente finite este dependentă de implementarea unor programe de calcul, mărimile cu care aceasta lucrează sunt de regulă vectori şi matrice.
5
1/12/2010
6
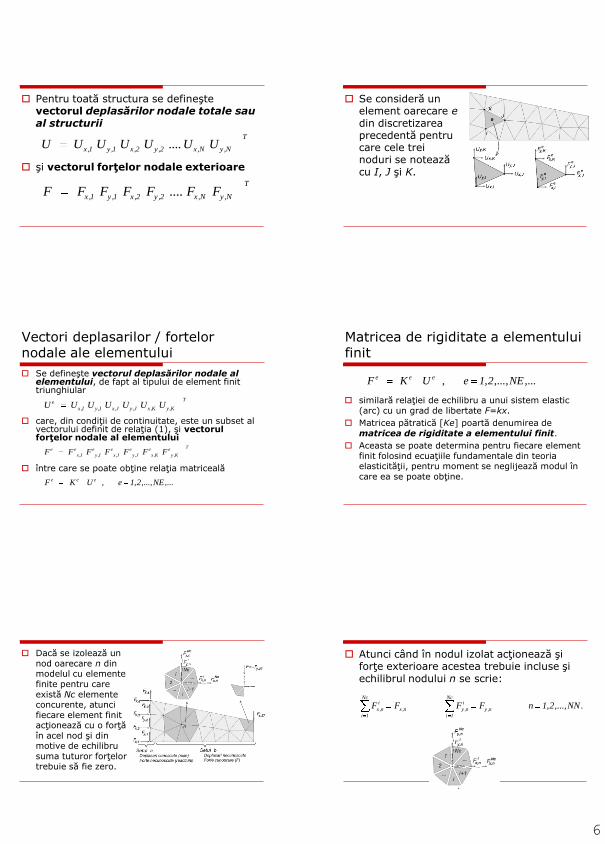
Pentru toată structura se defineşte vectorul deplasărilor nodale totale sau al structurii
şi vectorul forţelor nodale exterioare
T
x,1 y,1 x,2 y,2 x,N y,NU U U U U ....U U
T
x,1 y,1 x,2 y,2 x,N y,NF F F F F .... F F
Se consideră un element oarecare e din discretizarea precedentă pentru care cele trei noduri se notează cu I, J şi K.
Vectori deplasarilor / fortelor nodale ale elementului
Se defineşte vectorul deplasărilor nodale al elementului, de fapt al tipului de element finit triunghiular
care, din condiţii de continuitate, este un subset al vectorului definit de relaţia (1), şi vectorul forţelor nodale al elementului
între care se poate obţine relaţia matriceală
Te
x,I y ,I x,J y ,J x,K y,KU U U U U U U
Te e e e e e e
x,I y ,I x,J y ,J x,K y,KF F F F F F F
e e eF K U , e 1,2,...,NE,...
Matricea de rigiditate a elementului finit
similară relaţiei de echilibru a unui sistem elastic (arc) cu un grad de libertate F=kx.
Matricea pătratică [Ke] poartă denumirea de matricea de rigiditate a elementului finit.
Aceasta se poate determina pentru fiecare element finit folosind ecuaţiile fundamentale din teoria elasticităţii, pentru moment se neglijează modul în care ea se poate obţine.
e e eF K U , e 1,2,...,NE,...
Dacă se izolează un nod oarecare n din modelul cu elemente finite pentru care există Nc elemente concurente, atunci fiecare element finit acţionează cu o forţă în acel nod şi din motive de echilibru suma tuturor forţelor trebuie să fie zero.
Atunci când în nodul izolat acţionează şi forţe exterioare acestea trebuie incluse şi echilibrul nodului n se scrie:
Nc Nci i
x ,n x,n y ,n y ,n
i 1 i 1
F F F F n 1,2,...,NN.
6

1/12/2010
7
Dacă seţine seama de cele 2 *NN ecuaţii şi în expresiile sumelor se introduc forţele obţinute din relaţiile se obţine o relaţie matriceală de forma:
Nci
x ,n x ,n
i 1
Nci
y ,n y ,n
i 1
F F
n 1,2,...,NN.
F F
e e eF K U , e 1,2,...,NE,...
F K U
Asamblarea
în care [K] este numită matricea de rigiditate globală a structurii.
Această operaţie de obţinere a matricei de rigiditate globale din matricele de rigiditate a elementelor poartă denumirea de asamblarea matricei de rigiditate globală şi se prezintă sugestiv în schema
F K U
ASAMBLAREe e e
i 1,2,....,NEK U F F K U
Dimensiunea matricei de rigiditate [K] este 2NN x 2NN şi de obicei aceasta rezultă singulară, deci din ecuaţia nu se pot obţine direct deplasările necunoscute.
F K U
Dacă însă se ţine seama de condiţiile la limită,
adică pentru unele noduri se cunosc deplasările
iar pentru altele forţele exterioare aplicate şi
gradele de libertate se clasifică în două seturi.
-a: deplasări cunoscute (de cele mai multe ori nule) şi forţe exterioare reacţiuni necunoscute şi
-b: deplasări necunoscute şi forţe exterioare aplicate cunoscute, ecuaţiile se pot partiţiona (rearanja) în raport cu acestea astfel:
a aaa ab
b bba bb
U FK K
U FK KF K U
Din a doua ecuaţie matriceală rezultă deplasările necunoscute
iar apoi din prima ecuaţie rezultă forţele necunoscute (reacţiuni)
1
b b abb baU K F K U
a a baa abF K U K U
7
1/12/2010
8
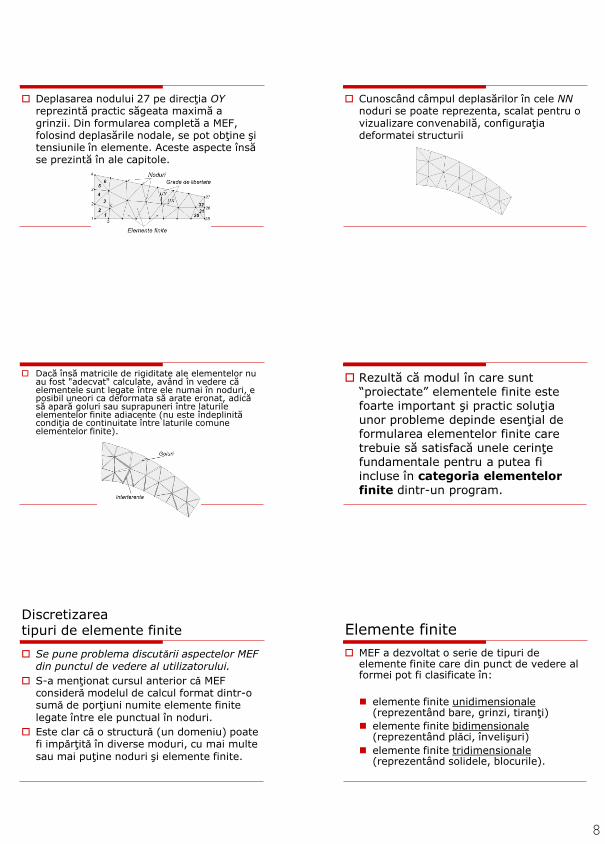
Deplasarea nodului 27 pe direcţia OY reprezintă practic săgeata maximă a grinzii. Din formularea completă a MEF, folosind deplasările nodale, se pot obţine şi tensiunile în elemente. Aceste aspecte însă se prezintă în ale capitole.
Cunoscând câmpul deplasărilor în cele NN noduri se poate reprezenta, scalat pentru o vizualizare convenabilă, configuraţia deformatei structurii
Dacă însă matricile de rigiditate ale elementelor nu au fost "adecvat" calculate, având în vedere că elementele sunt legate între ele numai în noduri, e posibil uneori ca deformata să arate eronat, adică să apară goluri sau suprapuneri între laturile elementelor finite adiacente (nu este îndeplinită condiţia de continuitate între laturile comune elementelor finite).
Rezultă că modul în care sunt “proiectate” elementele finite este foarte important şi practic soluţia unor probleme depinde esenţial de formularea elementelor finite care trebuie să satisfacă unele cerinţe fundamentale pentru a putea fi incluse în categoria elementelor finite dintr-un program.
Discretizareatipuri de elemente finite
Se pune problema discutǎrii aspectelor MEF din punctul de vedere al utilizatorului.
S-a menţionat cursul anterior cǎ MEF considerǎ modelul de calcul format dintr-o sumǎ de porţiuni numite elemente finite
legate între ele punctual în noduri.
Este clar cǎ o structurǎ (un domeniu) poate fi impǎrţitǎ în diverse moduri, cu mai multe
sau mai puţine noduri şi elemente finite.
Elemente finite
MEF a dezvoltat o serie de tipuri de elemente finite care din punct de vedere al formei pot fi clasificate în:
elemente finite unidimensionale(reprezentând bare, grinzi, tiranţi)
elemente finite bidimensionale(reprezentând plǎci, învelişuri)
elemente finite tridimensionale(reprezentând solidele, blocurile).
8
1/12/2010
9
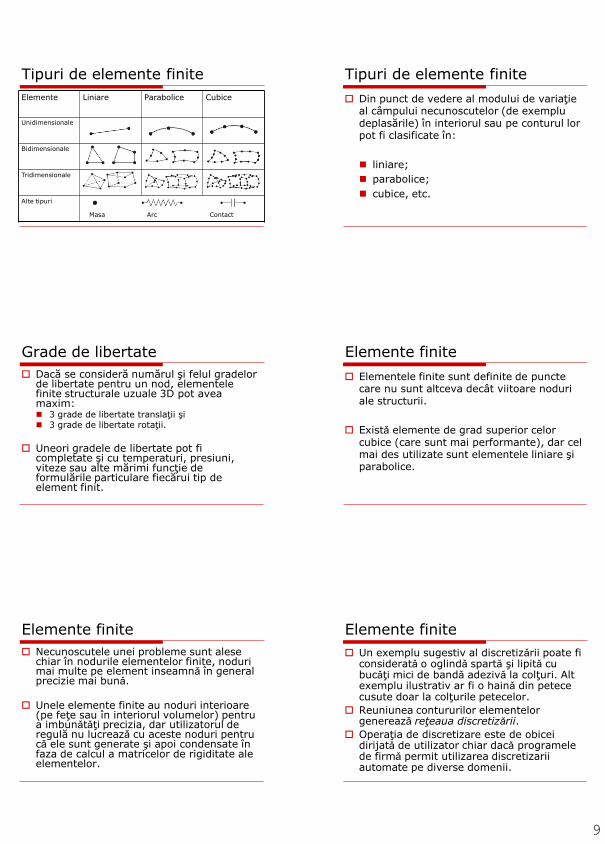
Tipuri de elemente finite
Elemente Liniare Parabolice Cubice
Unidimensionale
Bidimensionale
Tridimensionale
Alte tipuri
Masa Arc Contact
Tipuri de elemente finite
Din punct de vedere al modului de variaţie al câmpului necunoscutelor (de exemplu deplasările) în interiorul sau pe conturul lor pot fi clasificate în:
liniare;
parabolice;
cubice, etc.
Grade de libertate
Dacă se consideră numărul şi felul gradelor de libertate pentru un nod, elementele finite structurale uzuale 3D pot avea maxim: 3 grade de libertate translaţii şi 3 grade de libertate rotaţii.
Uneori gradele de libertate pot fi completate şi cu temperaturi, presiuni, viteze sau alte mărimi funcţie de formulările particulare fiecărui tip de element finit.
Elemente finite
Elementele finite sunt definite de puncte care nu sunt altceva decât viitoare noduri ale structurii.
Existǎ elemente de grad superior celor cubice (care sunt mai performante), dar cel mai des utilizate sunt elementele liniare şi parabolice.
Elemente finite
Necunoscutele unei probleme sunt alese chiar în nodurile elementelor finite, noduri mai multe pe element inseamnǎ în general precizie mai bunǎ.
Unele elemente finite au noduri interioare (pe feţe sau în interiorul volumelor) pentru a imbunǎtǎţi precizia, dar utilizatorul de regulă nu lucreazǎ cu aceste noduri pentru cǎ ele sunt generate şi apoi condensate în faza de calcul a matricelor de rigiditate ale elementelor.
Elemente finite
Un exemplu sugestiv al discretizǎrii poate fi consideratǎ o oglindǎ spartǎ şi lipitǎ cu bucǎţi mici de bandǎ adezivǎ la colţuri. Alt exemplu ilustrativ ar fi o hainǎ din petece cusute doar la colţurile petecelor.
Reuniunea contururilor elementelor genereazǎ reţeaua discretizǎrii.
Operaţia de discretizare este de obicei dirijatǎ de utilizator chiar dacǎ programele de firmǎ permit utilizarea discretizarii automate pe diverse domenii.
9
1/12/2010
10
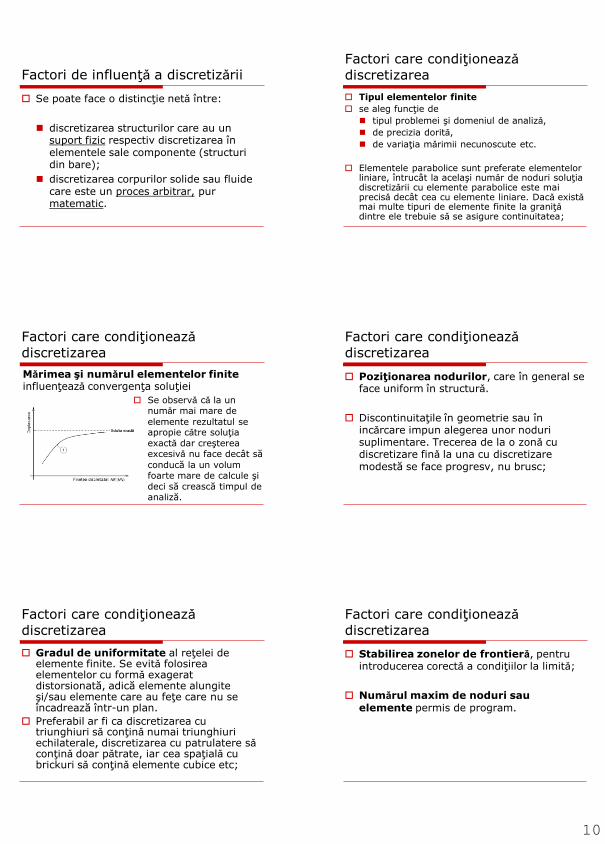
Factori de influenţǎ a discretizǎrii
Se poate face o distincţie netǎ între:
discretizarea structurilor care au un suport fizic respectiv discretizarea în elementele sale componente (structuri din bare);
discretizarea corpurilor solide sau fluide care este un proces arbitrar, pur matematic.
Factori care condiţioneazǎ
discretizarea
Tipul elementelor finite
se aleg funcţie de
tipul problemei şi domeniul de analizǎ,
de precizia doritǎ,
de variaţia mǎrimii necunoscute etc.
Elementele parabolice sunt preferate elementelor liniare, întrucât la acelaşi numǎr de noduri soluţia discretizǎrii cu elemente parabolice este mai precisǎ decât cea cu elemente liniare. Dacǎ existǎmai multe tipuri de elemente finite la graniţǎdintre ele trebuie sǎ se asigure continuitatea;
Factori care condiţioneazǎdiscretizarea
Se observǎ cǎ la un numǎr mai mare de
elemente rezultatul se apropie cǎtre soluţia exactǎ dar creşterea excesivǎ nu face decât să
conducă la un volum foarte mare de calcule şi deci să crească timpul de analiză.
Mǎrimea şi numǎrul elementelor finiteinfluenţeazǎ convergenţa soluţiei
Factori care condiţioneazǎdiscretizarea
Poziţionarea nodurilor, care în general se face uniform în structurǎ.
Discontinuitaţile în geometrie sau în incǎrcare impun alegerea unor noduri suplimentare. Trecerea de la o zonǎ cu discretizare finǎ la una cu discretizare modestă se face progresv, nu brusc;
Factori care condiţioneazǎ
discretizarea
Gradul de uniformitate al reţelei de elemente finite. Se evitǎ folosirea elementelor cu formǎ exagerat distorsionată, adică elemente alungite şi/sau elemente care au feţe care nu se încadrează într-un plan.
Preferabil ar fi ca discretizarea cu triunghiuri sǎ conţinǎ numai triunghiuri echilaterale, discretizarea cu patrulatere sǎconţinǎ doar pǎtrate, iar cea spaţialǎ cu brickuri sǎ conţinǎ elemente cubice etc;
Factori care condiţioneazǎ
discretizarea
Stabilirea zonelor de frontierǎ, pentru introducerea corectǎ a condiţiilor la limitǎ;
Numǎrul maxim de noduri sau
elemente permis de program.
10
1/12/2010
11
Metoda deplasărilor
Metoda deplasărilor s-a dezvoltat înainte de metoda elementelor finite şi a fost aplicată structurilor complexe formate din bare articulate şi grinzi.
La început metoda elementelor finite s-a inspirat din metoda deplasărilor, iar în momentul de fată aceasta (metoda deplasărilor) poate fi privită ca un caz particular al metodei elementelor finite, fiind o metodă exactă pentru calculul static al structurilor din bare drepte.
Metoda deplasărilor
Prezentarea metodei deplasărilor constituie pentru utilizatorul care stăpâneşte elementele de bază din rezistenţa materialelor si analiza structurala o mai uşoară înţelegere a unor noţiuni de bază cum ar fi matricea de rigiditate a unui element şi asamblarea matricei de rigiditate a structurii.
(RIGIDITATE)
Actiunea (forta/moment) ce cauzeza o deplasare unitara (deplasare liniara/rotire) unui element
1 1
P Mk k
Metoda deplasărilor
Se consideră o structură simplă din bare articulate în plan, pentru care se prezintă modul de obţinere
a matricei de rigiditate a elementului în coordonate locale şi globale,
modul de asamblare a matricei de rigiditate a stucturii,
impunerea condiţiilor la limită şi
rezolvarea problemei pentru o analiză statică liniară.
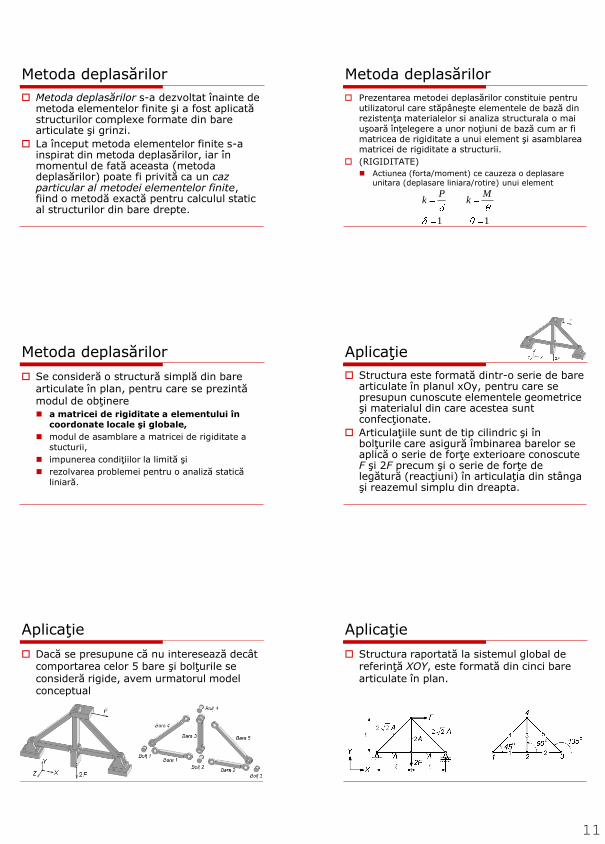
Aplicaţie
Structura este formată dintr-o serie de bare articulate în planul xOy, pentru care se presupun cunoscute elementele geometrice şi materialul din care acestea sunt confecţionate.
Articulaţiile sunt de tip cilindric şi în bolţurile care asigură îmbinarea barelor se aplică o serie de forţe exterioare conoscute F şi 2F precum şi o serie de forţe de legătură (reacţiuni) în articulaţia din stânga şi reazemul simplu din dreapta.
Aplicaţie
Dacă se presupune că nu interesează decât comportarea celor 5 bare şi bolţurile se consideră rigide, avem urmatorul model conceptual
Aplicaţie
Structura raportată la sistemul global de referinţă XOY, este formată din cinci bare articulate în plan.
11
1/12/2010
12
Aplicaţie
Cunoscând:
lungimea l,
ariile barelor de parametru A,
modulul de elasticitate longitudinal E, şi
valoarea parametrului F care defineşte forţele,
Se cere să se determine deplasările nodurilor, reacţiunile în reazeme şi forţele axiale (eforturile) în bare.
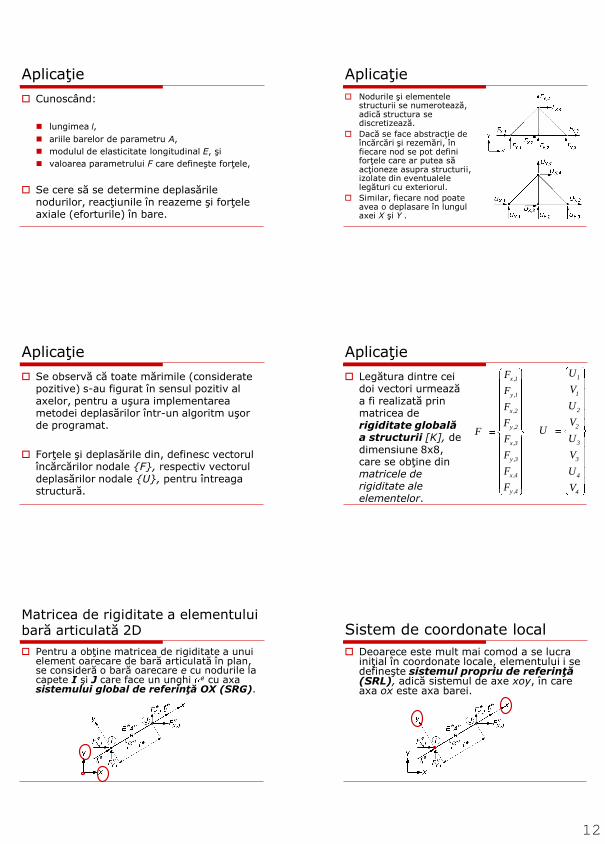
Aplicaţie
Nodurile şi elementele structurii se numerotează, adică structura se discretizează.
Dacă se face abstracţie de încărcări şi rezemări, în fiecare nod se pot defini forţele care ar putea să acţioneze asupra structurii, izolate din eventualele legături cu exteriorul.
Similar, fiecare nod poate avea o deplasare în lungul axei X şi Y .
Aplicaţie
Se observă că toate mărimile (considerate pozitive) s-au figurat în sensul pozitiv al axelor, pentru a uşura implementarea metodei deplasărilor într-un algoritm uşor de programat.
Forţele şi deplasările din, definesc vectorul încărcărilor nodale {F}, respectiv vectorul deplasărilor nodale {U}, pentru întreaga structură.
Aplicaţie
Legătura dintre cei doi vectori urmează a fi realizată prin matricea de rigiditate globală a structurii [K], de dimensiune 8x8, care se obţine din matricele de rigiditate ale elementelor.
x ,1
y ,1
x ,2
y ,2
x ,3
y ,3
x ,4
y ,4
F
F
F
FF
F
F
F
F
1
1
2
2
3
3
4
4
U
V
U
VU
U
V
U
V
Matricea de rigiditate a elementului bară articulată 2D
Pentru a obţine matricea de rigiditate a unui element oarecare de bară articulată în plan, se consideră o bară oarecare e cu nodurile la capete I şi J care face un unghi e cu axa sistemului global de referinţă OX (SRG).
Sistem de coordonate local
Deoarece este mult mai comod a se lucra iniţial în coordonate locale, elementului i se defineşte sistemul propriu de referinţă (SRL), adică sistemul de axe xoy, în care axa ox este axa barei.
12
1/12/2010
13
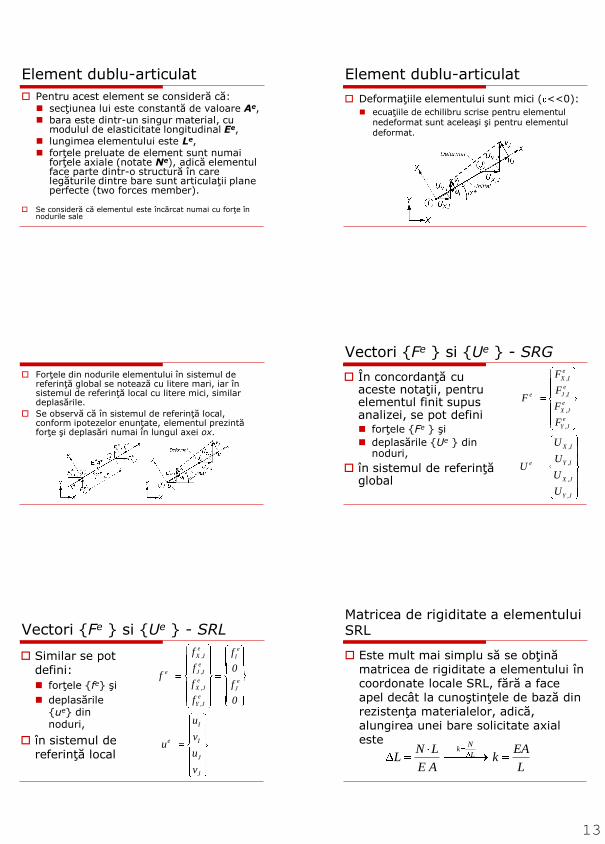
Element dublu-articulat
Pentru acest element se consideră că: secţiunea lui este constantă de valoare Ae, bara este dintr-un singur material, cu
modulul de elasticitate longitudinal Ee, lungimea elementului este Le, forţele preluate de element sunt numai
forţele axiale (notate Ne), adică elementul face parte dintr-o structură în care legăturile dintre bare sunt articulaţii plane perfecte (two forces member).
Se consideră că elementul este încărcat numai cu forţe în nodurile sale
Element dublu-articulat
Deformaţiile elementului sunt mici ( <<0):
ecuaţiile de echilibru scrise pentru elementul nedeformat sunt aceleaşi şi pentru elementul deformat.
Forţele din nodurile elementului în sistemul de referinţă global se notează cu litere mari, iar în sistemul de referinţă local cu litere mici, similar deplasările.
Se observă că în sistemul de referinţă local, conform ipotezelor enunţate, elementul prezintă forţe şi deplasări numai în lungul axei ox.
Vectori {Fe } si {Ue } - SRG
În concordanţă cu aceste notaţii, pentru elementul finit supus analizei, se pot defini forţele {Fe } şi
deplasările {Ue } din noduri,
în sistemul de referinţă global
e
X ,I
e
J ,Ie
e
X ,J
e
Y ,J
F
FF
F
F
X ,I
Y ,Ie
X ,J
Y ,J
U
UU
U
U
Vectori {Fe } si {Ue } - SRL
Similar se pot defini:
forţele {fe} şi
deplasările {ue} din noduri,
în sistemul de referinţă local
e e
X ,I I
e
J ,Ie
e e
X ,J J
e
Y ,J
f f
f 0f
f f
f 0
I
e I
J
J
u
vu
u
v
Matricea de rigiditate a elementului SRL
Este mult mai simplu să se obţină matricea de rigiditate a elementului în coordonate locale SRL, fără a face apel decât la cunoştinţele de bază din rezistenţa materialelor, adică, alungirea unei bare solicitate axial este N
kL
N L EAL k
E A L
13
1/12/2010
14
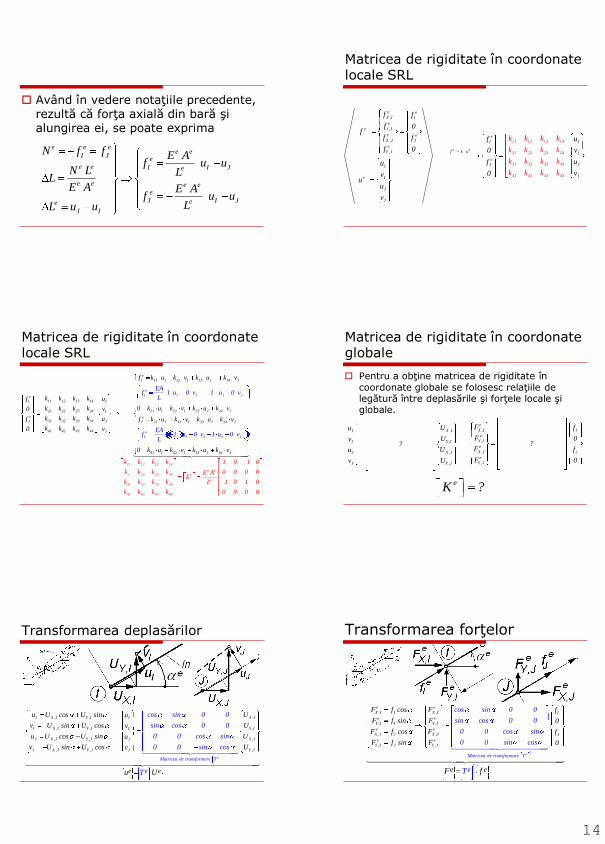
Având în vedere notaţiile precedente, rezultă că forţa axială din bară şi alungirea ei, se poate exprima
e e ee e
I Je
e e I I Je
e e e ee
J I Jee
J I
N f f E Af u u
N L LL
E A E Af u u
LL u u
Matricea de rigiditate în coordonate locale SRL
e e
11 12 13 14
21 22 23 24
31 32 33 3
e e
X ,I I
e
J ,Ie
e e eX ,J J IIe
f k uY ,
4
41 42 43 4
J I
e
JJI
Je I
J
4
J
f f
f 0f
f f uf
f 0 v0
k k k k
k k k k
k uk k k
k
fu
v0vu
v
k
u
k k
Matricea de rigiditate în coordonate locale SRL
e
I 11 I 12 I 13 J 14 J
e11 12 13 14 II
21 I 22 I 23 J 2421 22 23 24 I
e31 32 33 34 JJ
41 42 43 44 J
e
I I I J J
EAf
f k u k v k u k v
k k k k uf
0 k u k v k u k vk k k k v0
k k k k uf
k k k k
1 u 0 v 1 u 0 vL
v0
21
J
e
J 31 I 32 I 33 J 34 J
41 I 42 I
e
I I I J
11 12 13 14
e e22 23 24 e
e
31 32 33 34
43 J 44
J
41 42 43 44
J
f k u k v k u k v
0 k u k v k
k k k k 1 0 1
EAf 1 u 0
u
0
k k k k 0 0 0 0E Ak
k k k k 1 0 1 0L
k k k k 0
v 1
k
v
0 0
uL
v
0
0
Matricea de rigiditate în coordonate globale
Pentru a obţine matricea de rigiditate în coordonate globale se folosesc relaţiile de legătură între deplasările şi forţele locale şi globale.
X ,II
Y ,II
X ,JJ
Y ,JJ
Uu
Uv?
Uu
Uv
e
X ,I I
e
Y ,I
e
X ,J J
e
Y ,J
F f
F 0?
F f
F 0
eK ?
Transformarea deplasărilor
e
I X ,I Y ,I I
I X ,I Y ,I I
J X ,J Y ,J J
J X ,J Y ,J J
Matricea de transformare T
u U cos U sin u
v U sin U cos v
u U cos U sin u
v U sin U cos v
cos sin 0 0
sin cos 0 0
0 0 cos sin
0 0 sin cos
X ,I
Y ,I
X ,J
Y ,J
eee
U
U
U
U
u T U
Transformarea forţelor
Te
e e
X ,I I X ,I I
e e
Y ,I I Y ,I
e e
X ,J J X ,J J
e e
Y ,J J Y ,J
Matricea de transformare T
cos sin 0 0
sin cos
F f cos F f
F f sin F 0
F f cos F f
F f s
0 0
0 0 cos sin
0 0 sin cosin F 0
T
ee eTF f
14
1/12/2010
15
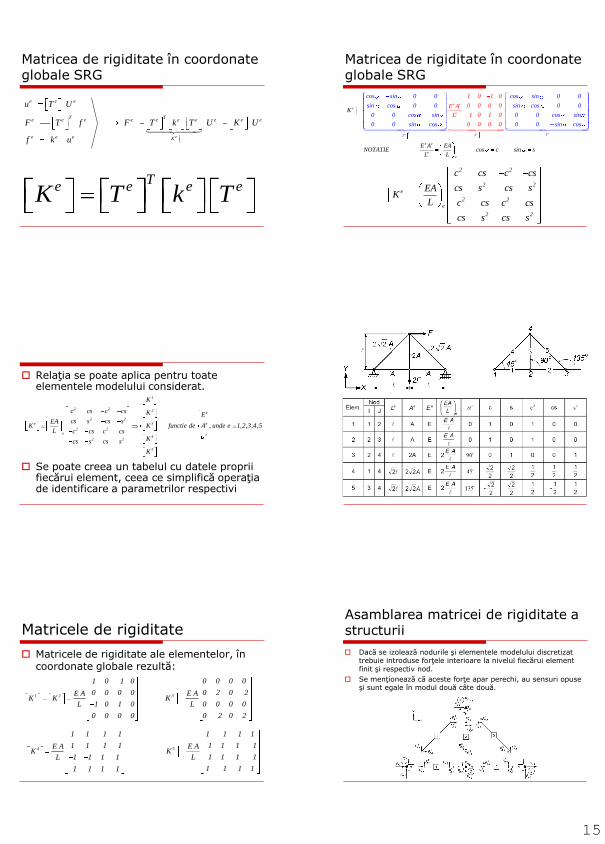
Matricea de rigiditate în coordonate globale SRG
e
e e e
T Te e e e e e e e e e
e e e K
u T U
F T f F T k T U K U
f k u
Te e e eK T k T
Matricea de rigiditate în coordonate globale SRG
T ee e TkT
ee e
e
1 0 1 0
0 0 0 0E A
1 0
cos sin 0 0 cos sin 0 0
sin cos 0 0 sin cos 0 0
0 0 cos sin 0 0 cos sin
0 0 sin co
1 0L
0 0 0 0s 0
K
0 sin cos
e e
e
e
E A EANOTATIE cos c sin s
L L
2 2
2 2
e
2 2e
2 2
c cs c cs
cs s cs sEAK
L c cs c cs
cs s cs s
Relaţia se poate aplica pentru toate elementele modelului considerat.
Se poate creea un tabelul cu datele proprii fiecărui element, ceea ce simplifică operaţia de identificare a parametrilor respectivi
1
2 2 2e
2 2
e 3 e
2 2e e
42 2
5
K
c cs c cs K Ecs s cs sEA
K K functie de A , unde e 1,2,3,4,5L c cs c cs
Kcs s cs s
K
Matricele de rigiditate
Matricele de rigiditate ale elementelor, în coordonate globale rezultă:
1 2
1 0 1 0
0 0 0 0E AK K
1 0 1 0L
0 0 0 0
3
0 0 0 0
0 2 0 2E AK
0 0 0 0L
0 2 0 2
4
1 1 1 1
1 1 1 1E AK
1 1 1 1L
1 1 1 1
5
1 1 1 1
1 1 1 1E AK
1 1 1 1L
1 1 1 1
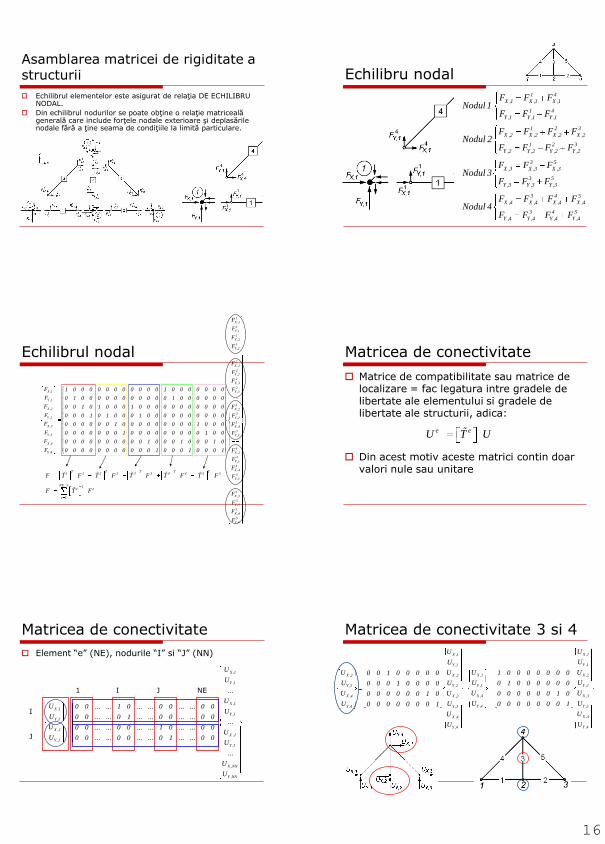
Asamblarea matricei de rigiditate a structurii
Dacă se izolează nodurile şi elementele modelului discretizat trebuie introduse forţele interioare la nivelul fiecărui element finit şi respectiv nod.
Se menţionează că aceste forţe apar perechi, au sensuri opuse şi sunt egale în modul două câte două.
15
1/12/2010
16
Asamblarea matricei de rigiditate a structurii
Echilibrul elementelor este asigurat de relaţia DE ECHILIBRU NODAL.
Din echilibrul nodurilor se poate obţine o relaţie matriceală generală care include forţele nodale exterioare şi deplasările nodale fără a ţine seama de condiţiile la limită particulare.
Echilibru nodal1 4
X ,1 X ,1 X ,1
1 4
Y ,1 Y ,1 Y ,1
1 2 3
X ,2 X ,2 X ,2 X ,2
1 2 3
Y ,2 Y ,2 Y ,2 Y ,2
3 5
X ,3 X ,3 X ,3
3 5
Y ,3 Y ,3 Y ,3
3 4 5
X ,4 X ,4 X ,4 X ,4
3 4 5
Y ,4 Y ,4 Y ,4 Y ,4
F F FNodul 1
F F F
F F F FNodul 2
F F F F
F F FNodul 3
F F F
F F F FNodul 4
F F F F
Echilibrul nodal
X ,1
Y ,1
X ,2
Y ,2
X ,3
Y ,3
X ,4
Y ,4
F 1 0 0 0 0 0 0 0 0 0 0 0 1 0 0 0 0 0 0 0
F 0 1 0 0 0 0 0 0 0 0 0 0 0 1 0 0 0 0 0 0
F 0 0 1 0 1 0 0 0 1 0 0 0 0 0 0 0 0 0 0 0
F 0 0 0 1 0 1 0 0 0 1 0 0 0 0 0 0 0 0 0 0
F 0 0 0 0 0 0 1 0 0 0 0 0 0 0 0 0 1 0 0 0
F 0 0 0 0 0 0 0 1 0 0 0 0 0 0 0 0 0 1 0 0
F 0 0 0 0 0 0 0 0 0 0 1 0 0 0 1 0 0 0 1 0
F 0
1
X ,1
1
Y ,1
1
X ,2
1
Y ,2
2
X ,2
2
Y ,2
2
X ,3
2
Y ,3
3
X ,2
3
Y ,2
3
X ,4
3
Y ,4
4
X ,1
4
Y ,1
4
X ,4
4
Y ,4
5
X ,3
5
Y ,3
5
X ,4
5
Y ,4
F
F
F
F
F
F
F
F
F
F
F
F
0 0 0 0 0 0 0 0 0 0 1 0 0 0 1 0 0 0 1 F
F
F
F
F
F
F
F
T T T T T1 1 2 2 3 3 4 4 5 5
NE 5T
e e
e 1
F T F T F T F T F T F
F T F
Matricea de conectivitate
Matrice de compatibilitate sau matrice de localizare = fac legatura intre gradele de libertate ale elementului si gradele de libertate ale structurii, adica:
Din acest motiv aceste matrici contin doar valori nule sau unitare
e eU T U
Matricea de conectivitate
Element “e” (NE), nodurile “I” si “J” (NN)
X ,1
Y ,1
X ,I
X ,I
Y ,I
Y ,I
X ,J
X ,J
Y ,J
Y ,J
X ,NN
Y ,NN
U
U
...
UU 0 0 ... ... 1 0 ... ... 0 0 ... ... 0 0
UU 0 0 ... ... 0 1 ... ... 0 0 ... ... 0 0
...U 0 0 ... ... 0 0 ... ... 1 0 ... ... 0 0
UU 0 0 ... ... 0 0 ... ... 0 1 ... ... 0 0
U
...
U
U
1 I J NE
I
J
Matricea de conectivitate 3 si 4
X ,1
Y ,1
X ,2 X ,2
Y ,2 Y ,2
X ,4 X ,3
Y ,4 Y ,3
X ,4
Y ,4
U
U
U U0 0 1 0 0 0 0 0
U U0 0 0 1 0 0 0 0
U U0 0 0 0 0 0 1 0
U U0 0 0 0 0 0 0 1
U
U
X ,1
Y ,1
X ,1 X ,2
Y ,1 Y ,2
X ,4 X ,3
Y ,4 Y ,3
X ,4
Y ,4
U
U
U U1 0 0 0 0 0 0 0
U U0 1 0 0 0 0 0 0
U U0 0 0 0 0 0 1 0
U U0 0 0 0 0 0 0 1
U
U
16
1/12/2010
17
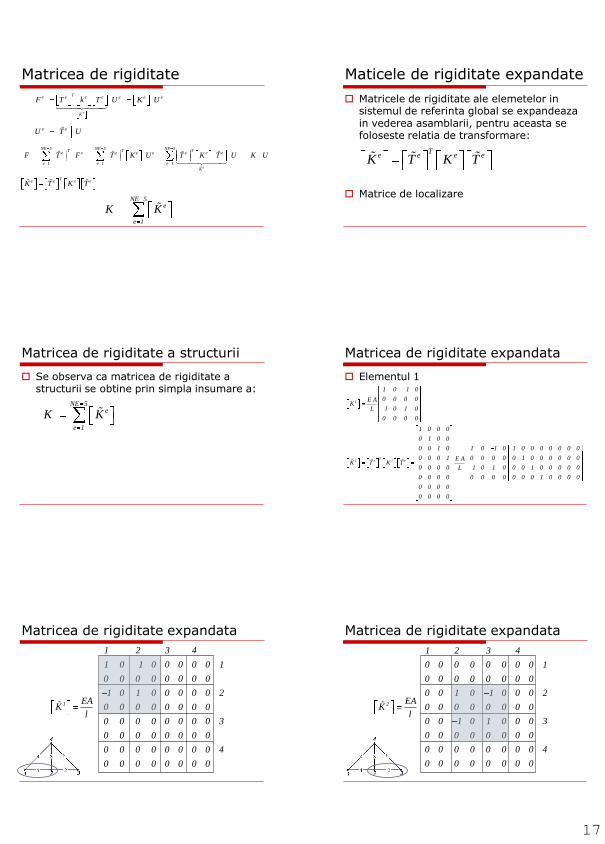
Matricea de rigiditate
e
Te e e e e e e
K
F T k T U K U
e eU T U
e
NE 5 NE 5 NE 5T T T
e e e e e e e e
e 1 e 1 e 1
K
Te e e e
F T F T K U T K T U K U
K T K T
NE 5e
e 1
K K
Maticele de rigiditate expandate
Matricele de rigiditate ale elemetelor in sistemul de referinta global se expandeaza in vederea asamblarii, pentru aceasta se foloseste relatia de transformare:
Matrice de localizare
Te e e eK T K T
Matricea de rigiditate a structurii
Se observa ca matricea de rigiditate a structurii se obtine prin simpla insumare a:
NE 5e
e 1
K K
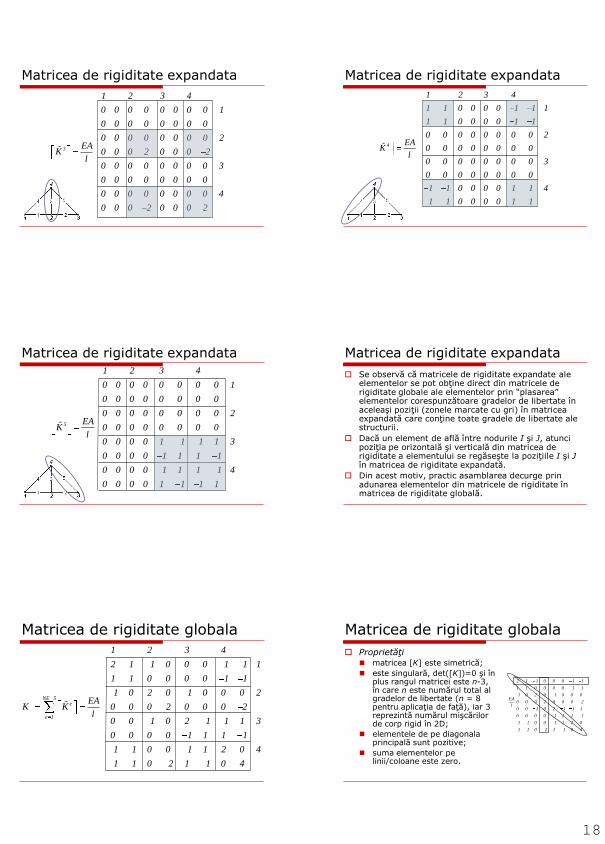
Matricea de rigiditate expandata
Elementul 1
1
T1 e 1 e
1 0 1 0
0 0 0 0E AK
1 0 1 0L
0 0 0 0
1 0 0 0
0 1 0 0
0 0 1 0 1 0 1 0 1 0 0 0 0 0 0 0
0 0 0 1 0 0 0 0 0 1 0 0 0 0 0 0E AK T K T
0 0 0 0 1 0 1 0 0 0 1 0 0 0 0 0L
0 0 0 0 0 0 0 0 0 0 0 1 0 0 0 0
0 0 0 0
0 0 0 0
Matricea de rigiditate expandata
1
1 2 3 4
1 0 1 0 0 0 0 0 1
0 0 0 0 0 0 0 0
1 0 1 0 0 0 0 0 2EA
K 0 0 0 0 0 0 0 0l
0 0 0 0 0 0 0 0 3
0 0 0 0 0 0 0 0
0 0 0 0 0 0 0 0 4
0 0 0 0 0 0 0 0
Matricea de rigiditate expandata
2
1 2 3 4
0 0 0 0 0 0 0 0 1
0 0 0 0 0 0 0 0
0 0 1 0 1 0 0 0 2EA
K 0 0 0 0 0 0 0 0l
0 0 1 0 1 0 0 0 3
0 0 0 0 0 0 0 0
0 0 0 0 0 0 0 0 4
0 0 0 0 0 0 0 0
17
1/12/2010
18
Matricea de rigiditate expandata
3
1 2 3 4
0 0 0 0 0 0 0 0 1
0 0 0 0 0 0 0 0
0 0 0 0 0 0 0 0 2EA
K 0 0 0 2 0 0 0 2l
0 0 0 0 0 0 0 0 3
0 0 0 0 0 0 0 0
0 0 0 0 0 0 0 0 4
0 0 0 2 0 0 0 2
Matricea de rigiditate expandata
4
1 2 3 4
1 1 0 0 0 0 1 1 1
1 1 0 0 0 0 1 1
0 0 0 0 0 0 0 0 2EA
K 0 0 0 0 0 0 0 0l
0 0 0 0 0 0 0 0 3
0 0 0 0 0 0 0 0
1 1 0 0 0 0 1 1 4
1 1 0 0 0 0 1 1
Matricea de rigiditate expandata
5
1 2 3 4
0 0 0 0 0 0 0 0 1
0 0 0 0 0 0 0 0
0 0 0 0 0 0 0 0 2EA
K 0 0 0 0 0 0 0 0l
0 0 0 0 1 1 1 1 3
0 0 0 0 1 1 1 1
0 0 0 0 1 1 1 1 4
0 0 0 0 1 1 1 1
Matricea de rigiditate expandata
Se observă că matricele de rigiditate expandate ale elementelor se pot obţine direct din matricele de rigiditate globale ale elementelor prin “plasarea” elementelor corespunzătoare gradelor de libertate în aceleaşi poziţii (zonele marcate cu gri) în matricea expandată care conţine toate gradele de libertate ale structurii.
Dacă un element de află între nodurile I şi J, atunci poziţia pe orizontală şi verticală din matricea de rigiditate a elementului se regăseşte la poziţiile I şi J în matricea de rigiditate expandată.
Din acest motiv, practic asamblarea decurge prin adunarea elementelor din matricele de rigiditate în matricea de rigiditate globală.
Matricea de rigiditate globala
NE 5e
e 1
1 2 3 4
2 1 1 0 0 0 1 1 1
1 1 0 0 0 0 1 1
1 0 2 0 1 0 0 0 2EA
K K 0 0 0 2 0 0 0 2l
0 0 1 0 2 1 1 1 3
0 0 0 0 1 1 1 1
1 1 0 0 1 1 2 0 4
1 1 0 2 1 1 0 4
Matricea de rigiditate globala
Proprietăţi matricea [K] este simetrică;
este singulară, det([K])=0 şi în plus rangul matricei este n-3, în care n este numărul total al gradelor de libertate (n = 8 pentru aplicaţia de faţă), iar 3 reprezintă numărul mişcărilor de corp rigid în 2D;
elementele de pe diagonala principală sunt pozitive;
suma elementelor pe linii/coloane este zero.
2 1 1 0 0 0 1 1
1 1 0 0 0 0 1 1
1 0 2 0 1 0 0 0EA
0 0 0 2 0 0 0 2l
0 0 1 0 2 1 1 1
0 0 0 0 1 1 1 1
1 1 0 0 1 1 2 0
1 1 0 2 1 1 0 4
18
1/12/2010
19
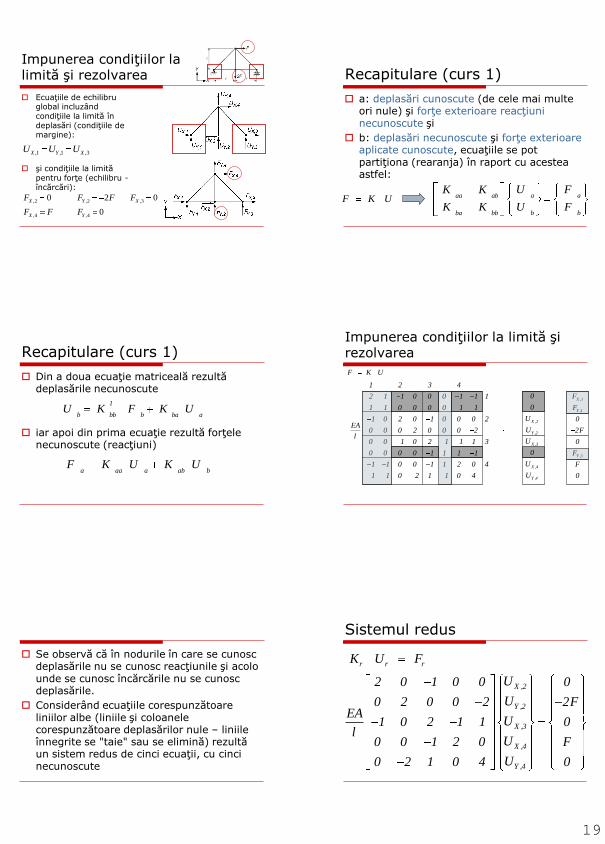
Impunerea condiţiilor la limită şi rezolvarea
Ecuaţiile de echilibru global incluzând condiţiile la limită în deplasări (condiţiile de margine):
şi condiţiile la limită pentru forţe (echilibru -încărcări):
,1 ,1 ,3X Y XU U U
,2 ,2 ,3
,4 ,4
0 2 0
0
X Y X
X Y
F F F F
F F F
Recapitulare (curs 1)
a: deplasări cunoscute (de cele mai multe ori nule) şi forţe exterioare reacţiuni necunoscute şi
b: deplasări necunoscute şi forţe exterioare aplicate cunoscute, ecuaţiile se pot partiţiona (rearanja) în raport cu acestea astfel:
a aaa ab
b bba bb
U FK K
U FK KF K U
Recapitulare (curs 1)
Din a doua ecuaţie matriceală rezultă deplasările necunoscute
iar apoi din prima ecuaţie rezultă forţele necunoscute (reacţiuni)
1
b b abb baU K F K U
a a baa abF K U K U
Impunerea condiţiilor la limită şi rezolvarea
X ,1
Y ,1
X ,2
Y ,2
X ,3
Y ,3
X ,4
Y ,4
F K U
1 2 3 4
02 1 1 0 0 0 1 1 1 F
01 1 0 0 0 0 1 1 F
U1 0 2 0 1 0 0 0 2 0EA
U0 0 0 2 0 0 0 2 2Fl
U0 0 1 0 2 1 1 1 3 0
00 0 0 0 1 1 1 1 F
U1 1 0 0 1 1 2 0 4 F
U1 1 0 2 1 1 0 4 0
Se observă că în nodurile în care se cunosc deplasările nu se cunosc reacţiunile şi acolo unde se cunosc încărcările nu se cunosc deplasările.
Considerând ecuaţiile corespunzătoare liniilor albe (liniile şi coloanele corespunzătoare deplasărilor nule – liniile înnegrite se "taie" sau se elimină) rezultă un sistem redus de cinci ecuaţii, cu cinci necunoscute
Sistemul redus
r r r
X ,2
Y ,2
X ,3
X ,4
Y ,4
K U F
U2 0 1 0 0 0
U0 2 0 0 2 2FEA
U1 0 2 1 1 0l
U0 0 1 2 0 F
U0 2 1 0 4 0
19

1/12/2010
20
Se observă, că matricea [Kr] este nesingulară. În general, această matrice rezultă nesingulară, dacă mişcările de corp rigid sunt înlăturate printr-o fixare adecvată a structurii
Pentru această aplicaţie cele trei deplasări nule impuse (uneori denumite blocaje), asigură împiedicarea mişcării de corp rigid.
Stuctura analizată este static determinată, impunerea unor blocaje suplimentare nu face decât să reducă şi mai mult dimensiunea matricei [Kr] şi deci să conducă la reducerea efortului de calcul pentru rezolvarea sistemului de ecuaţii algebrice.
Rezolvarea – aflarea deplasarilor
Rezolvarea sistemului de ecuaţii de mai sus conduce la soluţiile
,2 ,2 ,3
,4 ,4
1.5 3.5 3
2 2.5
X Y X
X Y
Fl Fl FlU U U
EA EA EA
Fl FlU U
EA EA
Rezolvarea – aflarea reactiunilor
Pentru a obţine reacţiunile, se consideră doar ecuaţiile corespunzătoare liniilor înegrite din ecuaţia globală, deoarece o parte din termenii ecuaţiilor se înmulţesc cu deplasări nule (se consideră termenii încadraţi şi înegriţi mai accentuat), adică
X ,2
Y ,2X ,1
X ,3Y ,1
X ,4Y ,3
Y ,4
U ( 1.5 Fl / EA )
U ( 3.5 Fl / EA )F 1 0 0 1 1 FEA
U ( 3 Fl / EA )F 0 0 0 1 1 0.5Fl
U ( 2 Fl / EA )F 0 0 1 1 1 1.5F
U ( 2.5 Fl / EA )
Rezolvarea – aflarea eforturilor
Pentru calculul eforturilor în bare se reconsideră ecuaţiile de echilibru ale elementului finit (ex. Elementul 4)
e e e e e e
4
4
f k u k T U
2 20 0
0 22 2F
1 0 1 0N 22 2 00 0
0 0 0 0 00 EA 2 2 Fl2 21 0 1 0lN 2 2 2EA
0 0 F0 0 0 0 Fl0 2 2 2
2.50EA2 2
0 02 2
Rezolvarea – aflarea eforturilor
Calculul decurge similar pentru toate barele
Dacă se doresc tensiunile din bare se foloseşte relaţia
1
2
3
4
5
1.5
1.5
2
2
2
3 2
2
N F
N F
N F
N F
N F
ee
e
N
A
Semnificaţia fizică a elementelor matricei de rigiditate
e 2 2
X ,I X ,I
e 2 2
Y ,I Y ,I
e 2 2eX ,J X ,J
e 2 2
Y ,J Y ,J
e
11 12 13 14X ,I
e
21 22 23 24Y ,I
e
31 32 33 34X ,J
e
Y ,J
F Uc cs c cs
F Ucs s cs sEA
F L Uc cs c cs
F Ucs s cs s
K K K KF
K K K KF
K K K KF
KF
X ,I
Y ,I
X ,J
41 42 43 44 Y ,J
U
U
U
K K K U
20
1/12/2010
21
Semnificaţia fizică a elementelor matricei de rigiditate
e
11 12 13 14 11X ,I
e
21 22 23 24 21Y ,I
e
31 32 33 34 31X ,J
e
41 42 43 44 41Y ,J
K K K K K1F
K K K K K0F
K K K K K0F
K K K K K0F
X ,I
Y ,I
X ,J
Y ,J
1U
0U
0U
0U
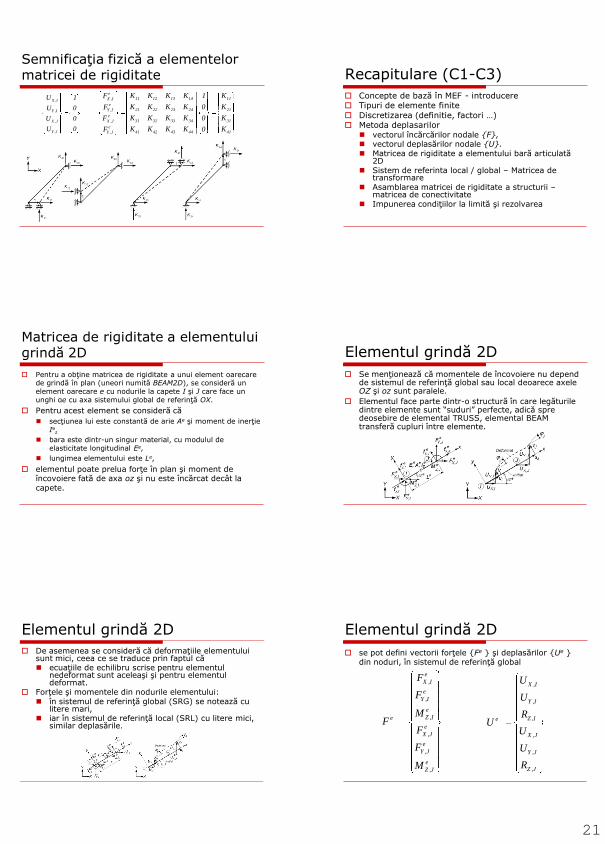
Recapitulare (C1-C3)
Concepte de bază în MEF - introducere Tipuri de elemente finite
Discretizarea (definitie, factori …) Metoda deplasarilor
vectorul încărcărilor nodale {F}, vectorul deplasărilor nodale {U}. Matricea de rigiditate a elementului bară articulată
2D Sistem de referinta local / global – Matricea de
transformare Asamblarea matricei de rigiditate a structurii –
matricea de conectivitate Impunerea condiţiilor la limită şi rezolvarea
Matricea de rigiditate a elementului grindă 2D
Pentru a obţine matricea de rigiditate a unui element oarecare de grindă în plan (uneori numită BEAM2D), se consideră un element oarecare e cu nodurile la capete I şi J care face un unghi αe cu axa sistemului global de referinţă OX.
Pentru acest element se consideră că
secţiunea lui este constantă de arie Ae şi moment de inerţie Ie
z
bara este dintr-un singur material, cu modulul de elasticitate longitudinal Ee,
lungimea elementului este Le,
elementul poate prelua forţe în plan şi moment de încovoiere fată de axa oz şi nu este încărcat decât la capete.
Elementul grindă 2D
Se menţionează că momentele de încovoiere nu depend de sistemul de referinţă global sau local deoarece axele OZ şi oz sunt paralele.
Elementul face parte dintr-o structură în care legăturile dintre elemente sunt “suduri” perfecte, adică spre deosebire de elemental TRUSS, elemental BEAM transferă cupluri între elemente.
Elementul grindă 2D
De asemenea se consideră că deformaţiile elementului sunt mici, ceea ce se traduce prin faptul că ecuaţiile de echilibru scrise pentru elementul
nedeformat sunt aceleaşi şi pentru elementul deformat.
Forţele şi momentele din nodurile elementului: în sistemul de referinţă global (SRG) se notează cu
litere mari, iar în sistemul de referinţă local (SRL) cu litere mici,
similar deplasările.
Elementul grindă 2D
se pot defini vectorii forţele {Fe } şi deplasărilor {Ue } din noduri, în sistemul de referinţă global
e
X ,I
e
Y ,I
e
Z ,Ie
e
X ,J
e
Y ,J
e
Z ,J
F
F
MF
F
F
M
X ,I
Y ,I
Z ,Ie
X ,J
Y ,J
Z ,J
U
U
RU
U
U
R
21
1/12/2010
22
Elementul grindă 2D
Similar se pot defini forţele {fe } şi deplasările {ue } în sistemul de referinţă local
e
X ,I
e
Y ,I
e
Z ,Ie
e
X ,J
e
Y ,J
e
Y ,J
f
f
mf
f
f
m
I
I
e I
J
J
J
u
v
uu
v
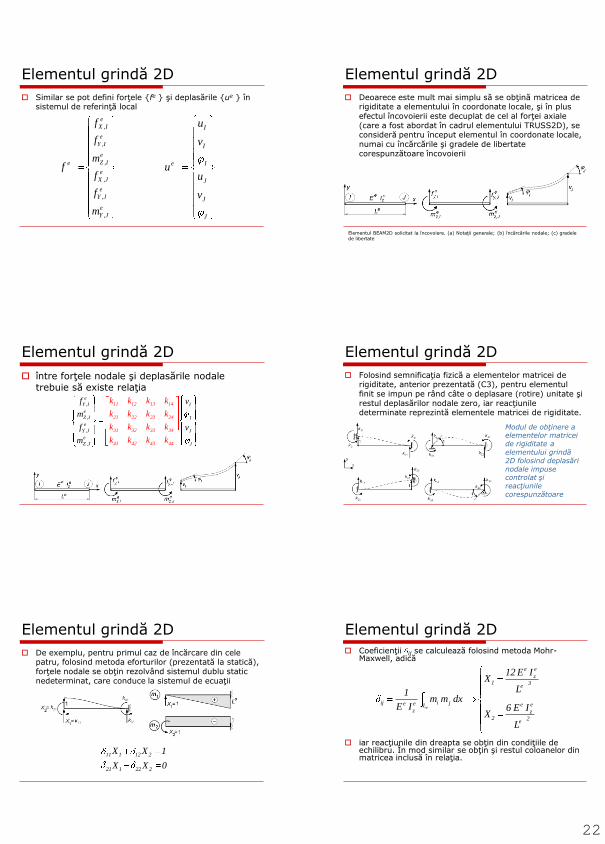
Elementul grindă 2D
Deoarece este mult mai simplu să se obţină matricea de rigiditate a elementului în coordonate locale, şi în plus efectul încovoierii este decuplat de cel al forţei axiale (care a fost abordat în cadrul elementului TRUSS2D), se consideră pentru început elementul în coordonate locale, numai cu încărcările şi gradele de libertate corespunzătoare încovoierii
Elementul BEAM2D solicitat la încovoiere. (a) Notaţii generale; (b) încărcările nodale; (c) gradele de libertate
Elementul grindă 2D
între forţele nodale şi deplasările nodale trebuie să existe relaţia
11 12 13 14
21 22 23 24
31 32 33 34
e
Y ,I
41 42
I
e
Z ,I
4
I
e
3 44
Y ,J J
e
Z ,J J
k k k k
k k k k
f v
m
f v
m
k k k k
k k k k
Elementul grindă 2D
Folosind semnificaţia fizică a elementelor matricei de rigiditate, anterior prezentată (C3), pentru elementul finit se impun pe rând câte o deplasare (rotire) unitate şi restul deplasărilor nodale zero, iar reacţiunile determinate reprezintă elementele matricei de rigiditate.
Modul de obţinere a elementelor matricei de rigiditate a elementului grindă 2D folosind deplasări nodale impuse controlat şi reacţiunile corespunzătoare
Elementul grindă 2D
De exemplu, pentru primul caz de încărcare din cele patru, folosind metoda eforturilor (prezentată la statică), forţele nodale se obţin rezolvând sistemul dublu static nedeterminat, care conduce la sistemul de ecuaţii
11 1 12 2
21 1 22 2
X X 1
X X 0
Elementul grindă 2D
Coeficienţii ij se calculează folosind metoda Mohr-Maxwell, adică
iar reacţiunile din dreapta se obţin din condiţiile de echilibru. În mod similar se obţin şi restul coloanelor din matricea inclusă în relaţia.
e
e e
z1 3
e
ij i je e e eLz z
2 2e
12 E IX
L1m m dx
E I 6 E IX
L
22
1/12/2010
23
Elementul grindă 2D
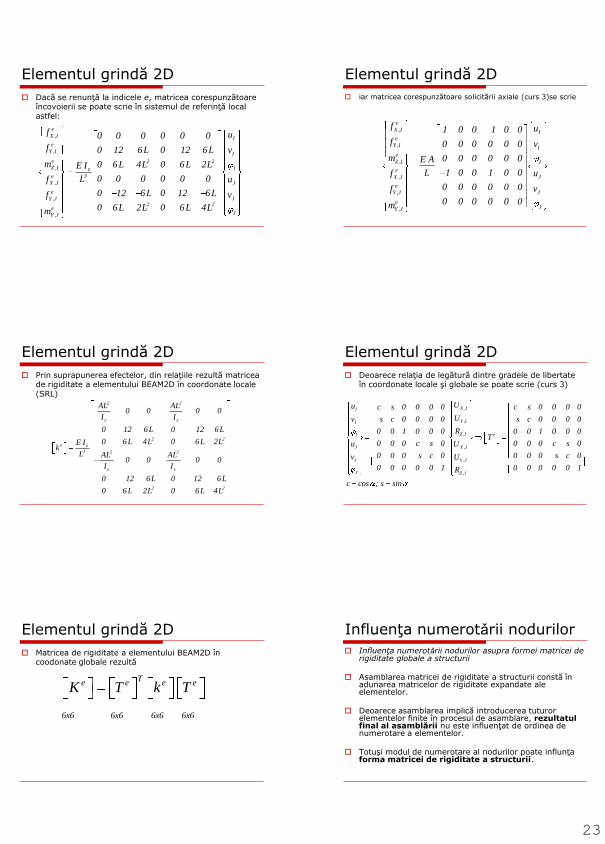
Dacă se renunţă la indicele e, matricea corespunzătoare încovoierii se poate scrie în sistemul de referinţă local astfel:
e
X ,I I
e
Y ,I I
e 2 2
Z ,I Iz
3e
JX ,J
e
JY ,J2 2
eJY ,J
f u0 0 0 0 0 0
f 0 12 6L 0 12 6L v
m 0 6L 4L 0 6L 2LE I
0 0 0 0 0 0L uf
0 12 6L 0 12 6L vf
0 6L 2L 0 6L 4Lm
Elementul grindă 2D
iar matricea corespunzătoare solicitării axiale (curs 3)se scrie
e
X ,I I
e
Y ,I I
e
Z ,I I
e
JX ,J
e
JY ,J
eJY ,J
f u1 0 0 1 0 0
f 0 0 0 0 0 0 v
m 0 0 0 0 0 0E A
1 0 0 1 0 0L uf
0 0 0 0 0 0 vf
0 0 0 0 0 0m
Elementul grindă 2D
Prin suprapunerea efectelor, din relaţiile rezultă matricea de rigiditate a elementului BEAM2D în coordonate locale (SRL)
2 2
z z
2 2
e z
3 2 2
z z
2 2
AL AL0 0 0 0
I I
0 12 6L 0 12 6L
0 6L 4L 0 6L 2LE Ik
L AL AL0 0 0 0
I I
0 12 6L 0 12 6L
0 6L 2L 0 6L 4L
Elementul grindă 2D
Deoarece relaţia de legătură dintre gradele de libertate în coordonate locale şi globale se poate scrie (curs 3)
X ,II
Y ,II
Z ,I eI
J X ,J
J Y ,J
J Z ,J
Uu c s 0 0 0 0 c s 0 0 0 0
Us c 0 0 0 0 s c 0 0 0 0v
R0 0 1 0 0 0 0 0 1 0 0 0T
0 0 0 c s 0 0 0 0 c s 0u U
0 0 0 s c 0 0 0 0 s c 0v U
0 0 0 0 0 1 0 0 0 0 0 1R
c cos ; s sin
Elementul grindă 2D
Matricea de rigiditate a elementului BEAM2D în coodonate globale rezultă
Te e e e
6x6 6x6 6x6 6x6
K T k T
Influenţa numerotǎrii nodurilor
Influenţa numerotǎrii nodurilor asupra formei matricei de rigiditate globale a structurii
Asamblarea matricei de rigiditate a structurii constă în adunarea matricelor de rigiditate expandate ale elementelor.
Deoarece asamblarea implică introducerea tuturor elementelor finite în procesul de asamblare, rezultatul final al asamblării nu este influenţat de ordinea de numerotare a elementelor.
Totuşi modul de numerotare al nodurilor poate influnţa forma matricei de rigiditate a structurii.
23
1/12/2010
24
Matricea de rigiditate element
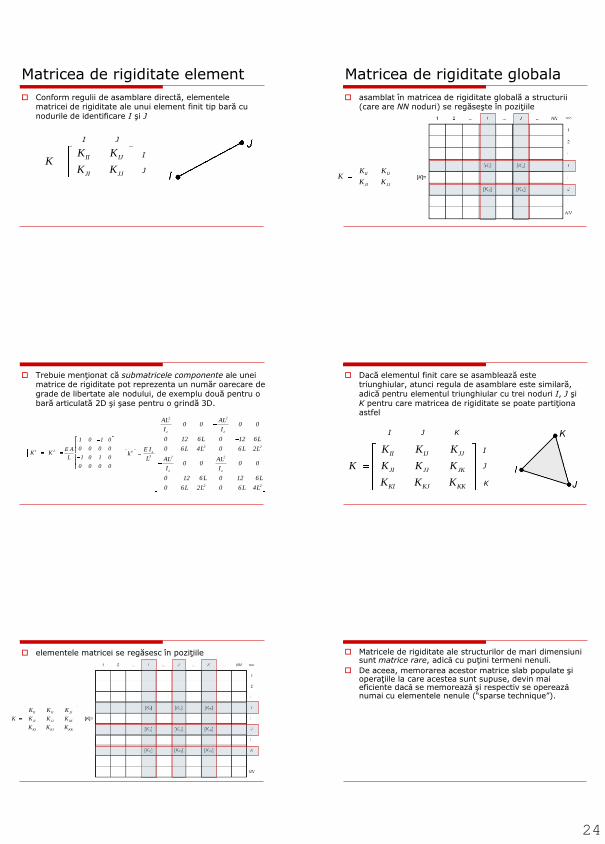
Conform regulii de asamblare directă, elementele matricei de rigiditate ale unui element finit tip bară cu nodurile de identificare I şi J
II IJ
JI JJ
K KK
K K
I
I
J
J
Matricea de rigiditate globala
asamblat în matricea de rigiditate globală a structurii (care are NN noduri) se regăseşte în poziţiile
II IJ
JI JJ
K KK
K K
Trebuie menţionat că submatricele componente ale unei matrice de rigiditate pot reprezenta un număr oarecare de grade de libertate ale nodului, de exemplu două pentru o bară articulată 2D şi şase pentru o grindă 3D.
2 2
z z
2 2
e z
3 2 2
z z
2 2
AL AL0 0 0 0
I I
0 12 6L 0 12 6L
0 6L 4L 0 6L 2LE Ik
L AL AL0 0 0 0
I I
0 12 6L 0 12 6L
0 6L 2L 0 6L 4L
1 2
1 0 1 0
0 0 0 0E AK K
1 0 1 0L
0 0 0 0
Dacă elementul finit care se asamblează este triunghiular, atunci regula de asamblare este similară, adică pentru elementul triunghiular cu trei noduri I, J şi K pentru care matricea de rigiditate se poate partiţiona astfel
II IJ JJ
JI JJ JK
KI KJ KK
K K K
K K K K
K K K
I
I
J
J K
K
elementele matricei se regăsesc în poziţiile
II IJ JJ
JI JJ JK
KI KJ KK
K K K
K K K K
K K K
Matricele de rigiditate ale structurilor de mari dimensiuni sunt matrice rare, adicǎ cu puţini termeni nenuli.
De aceea, memorarea acestor matrice slab populate şi operaţiile la care acestea sunt supuse, devin mai eficiente dacǎ se memoreazǎ şi respectiv se opereazǎnumai cu elementele nenule (“sparse technique”).
24
1/12/2010
25
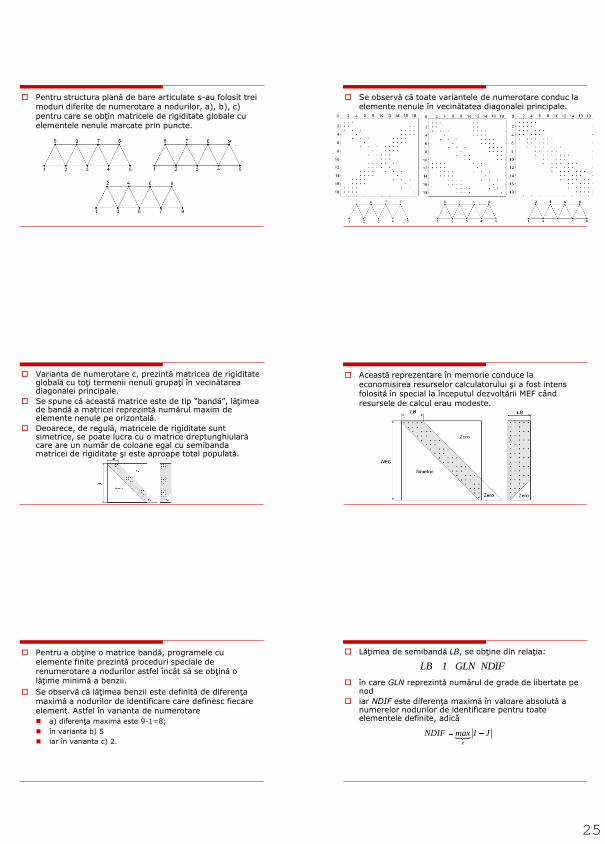
Pentru structura planǎ de bare articulate s-au folosit trei moduri diferite de numerotare a nodurilor, a), b), c) pentru care se obţin matricele de rigiditate globale cu elementele nenule marcate prin puncte.
Se observǎ cǎ toate variantele de numerotare conduc la elemente nenule în vecinǎtatea diagonalei principale.
Varianta de numerotare c, prezintǎ matricea de rigiditate globalǎ cu toţi termenii nenuli grupaţi în vecinǎtarea diagonalei principale.
Se spune cǎ aceastǎ matrice este de tip “bandǎ”, lǎţimea de bandǎ a matricei reprezintǎ numǎrul maxim de elemente nenule pe orizontalǎ.
Deoarece, de regulǎ, matricele de rigiditate sunt simetrice, se poate lucra cu o matrice dreptunghiularǎcare are un numǎr de coloane egal cu semibanda matricei de rigiditate şi este aproape total populatǎ.
Aceastǎ reprezentare în memorie conduce la economisirea resurselor calculatorului şi a fost intens folositǎ în special la începutul dezvoltǎrii MEF când
resursele de calcul erau modeste.
Pentru a obţine o matrice bandǎ, programele cu elemente finite prezintǎ proceduri speciale de renumerotare a nodurilor astfel încât sǎ se obţinǎ o lǎţime minimǎ a benzii.
Se observǎ cǎ lǎţimea benzii este definitǎ de diferenţa maximǎ a nodurilor de identificare care definesc fiecare element. Astfel în varianta de numerotare
a) diferenţa maximǎ este 9-1=8;
în varianta b) 5
iar în varianta c) 2.
Lǎţimea de semibandǎ LB, se obţine din relaţia:
în care GLN reprezintǎ numǎrul de grade de libertate pe nod
iar NDIF este diferenţa maximǎ în valoare absolutǎ a numerelor nodurilor de identificare pentru toate elementele definite, adică
LB 1 GLN NDIF
e
NDIF max I J
25
1/12/2010
26
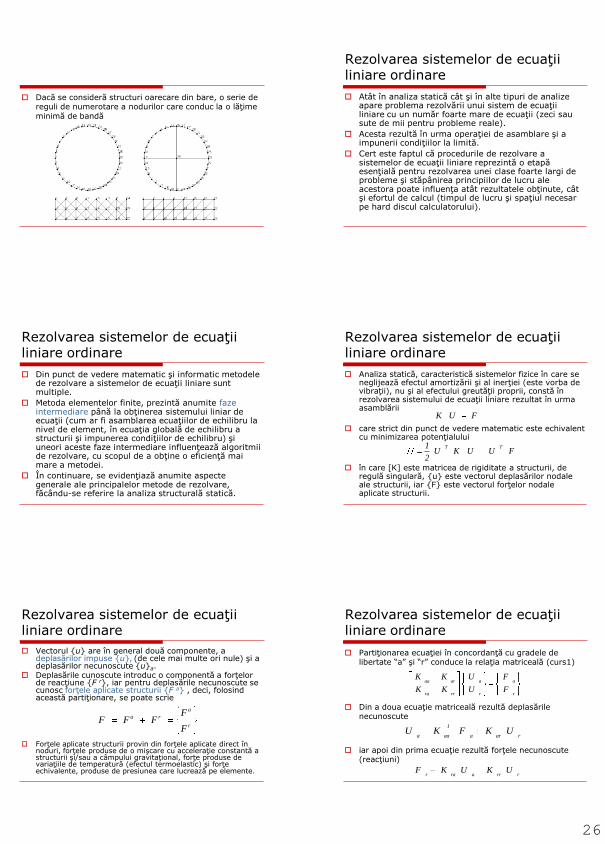
Dacă se consideră structuri oarecare din bare, o serie de reguli de numerotare a nodurilor care conduc la o lăţime minimă de bandă
Rezolvarea sistemelor de ecuaţii liniare ordinare
Atât în analiza statică cât şi în alte tipuri de analize apare problema rezolvării unui sistem de ecuaţii liniare cu un număr foarte mare de ecuaţii (zeci sau sute de mii pentru probleme reale).
Acesta rezultă în urma operaţiei de asamblare şi a impunerii condiţiilor la limită.
Cert este faptul că procedurile de rezolvare a sistemelor de ecuaţii liniare reprezintă o etapă esenţială pentru rezolvarea unei clase foarte largi de probleme şi stăpânirea principiilor de lucru ale acestora poate influenţa atât rezultatele obţinute, cât şi efortul de calcul (timpul de lucru şi spaţiul necesar pe hard discul calculatorului).
Rezolvarea sistemelor de ecuaţii liniare ordinare
Din punct de vedere matematic şi informatic metodele de rezolvare a sistemelor de ecuaţii liniare sunt multiple.
Metoda elementelor finite, prezintă anumite faze intermediare până la obţinerea sistemului liniar de ecuaţii (cum ar fi asamblarea ecuaţiilor de echilibru la nivel de element, în ecuaţia globală de echilibru a structurii şi impunerea condiţiilor de echilibru) şi uneori aceste faze intermediare influenţează algoritmii de rezolvare, cu scopul de a obţine o eficienţă mai mare a metodei.
În continuare, se evidenţiază anumite aspecte generale ale principalelor metode de rezolvare, făcându-se referire la analiza structurală statică.
Rezolvarea sistemelor de ecuaţii liniare ordinare
Analiza statică, caracteristică sistemelor fizice în care se neglijează efectul amortizării şi al inerţiei (este vorba de vibraţii), nu şi al efectului greutăţii proprii, constă în rezolvarea sistemului de ecuaţii liniare rezultat în urma asamblării
care strict din punct de vedere matematic este echivalent cu minimizarea potenţialului
în care [K] este matricea de rigiditate a structurii, de regulă singulară, {u} este vectorul deplasărilor nodale ale structurii, iar {F} este vectorul forţelor nodale aplicate structurii.
K U F
T T1U K U U F
2
Rezolvarea sistemelor de ecuaţii liniare ordinare
Vectorul {u} are în general două componente, a deplasărilor impuse {u}r (de cele mai multe ori nule) şi a deplasărilor necunoscute {u}a.
Deplasările cunoscute introduc o componentă a forţelor de reacţiune {F r}, iar pentru deplasările necunoscute se cunosc forţele aplicate structurii {F a} , deci, folosind această partiţionare, se poate scrie
Forţele aplicate structurii provin din forţele aplicate direct în noduri, forţele produse de o mişcare cu acceleraţie constantă a structurii şi/sau a câmpului gravitaţional, forţe produse de variaţiile de temperatură (efectul termoelastic) şi forţe echivalente, produse de presiunea care lucrează pe elemente.
a
a r
r
FF F F
F
Rezolvarea sistemelor de ecuaţii liniare ordinare
Partiţionarea ecuaţiei în concordanţă cu gradele de libertate “a” şi “r” conduce la relaţia matriceală (curs1)
Din a doua ecuaţie matriceală rezultă deplasările necunoscute
iar apoi din prima ecuaţie rezultă forţele necunoscute (reacţiuni)
a aaa ar
r rra rr
K K U F
K K U F
1
a a raa arU K F K U
r a rra rrF K U K U
26
1/12/2010
27
Rezolvarea sistemelor de ecuaţii liniare ordinare
Se observă că deplasările necunoscute pot fi obţinute dacă submatricea de rigiditate [K]aa este nesingulară, adică structura nu are mişcare de solid rigid sau mecanism.
Dacă totuşi echilibrul este asigurat de forţele aplicate, se poate face un artificiu de înlăturare a singularităţii matricei fie prin fixarea unor deplasări care suprimă mişcarea de corp rigid sau mecanism, fie prin introducerea adiţională de elemente în matricea respectivă care nu modifică considerabil matricea de rigiditate, dar care o transformă în matrice pozitiv definită.
Trebuie menţionat că deşi în ecuaţie apare inversa unei submatrice din matricea de rigiditate globală a structurii, aceasta nu se calculează practic niciodată. Metodele de rezolvare a sistemelor de ecuaţii sunt implementate astfel încât numărul de operaţii pentru rezolvarea lor să fie minim.
Metodele de rezolvare a ecuaţiilor liniare
Metodele de rezolvare a ecuaţiilor liniare în forma matriceală se pot clasifica în:
metode exacte, cum ar fi
metoda de eliminare Gauss,
metoda de factorizare Choleski sau
metoda de rezolvare frontală şi
metode aproximative, cum ar fi
metoda gradienţilor conjugaţi sau
metoda relaxării.
Metode exacte
Metodele exacte de rezolvare se referă la faptul că există algoritmi bine definiţi, care după un număr de paşi dinainte fixat - dependent de dimensiunea problemei, conduc la obţinerea soluţiei exacte, în ipoteza că erorile de reprezentare a numerelor în calculator (de trunchiere) sunt nesemnificative.
Pentru reprezentarea în dublă precizie şi probleme de dimensiuni acceptabile, bine condiţionate numeric (adică cu valori ale raportului dintre cea mai mare şi cea mai mică valoare de pe diagonala principală a matricei de rigiditate, cât mai aproape de unitate), metodele de rezolvare exactă s-au dovedit destul de eficiente, ani de-a rândul.
Metodele exacte
Aceste metode ţin seama de simetria şi caracterul bandă al matricei de rigiditate, pentru a fi mai eficiente.
Pentru a obţine o matrice cu o lăţime cât mai mică a benzii, numerotarea iniţială a nodurilor se schimbă (se face renumerotarea nodurilor folosind algoritmi consacraţi): dacă se foloseşte algoritmul de eliminare Gauss, sau se renumerotează elementele dacă se foloseşte
algoritmul de rezolvare frontală.
Acesta din urmă s-a impus în perioada în care memoria RAM a calculatoarelor era relativ limitată şi se bazează pe combinarea fazei de asamblare cu cea de eliminare a ecuaţiilor (în memoria ROM).
Algoritmul este foarte sofisticat, dar este stabil şi se foloseşte pe scară largă şi în momentul de faţă.
Metode exacte
Metodele de rezolvare exactă prezintă două faze:
prima este denumită eliminare sau triunghiularizare,
iar cea de-a doua retrosubstituţie.
Deoarece aceste metode sunt descrise pe larg în diverse cărţi şi tratate, cei interesaţi sunt invitaţi să consulte lucrări consacrate acestora.
Metode aproximative
Metoda gradienţilor conjugaţi cunoaşte diverse variante de implementare cum ar fi:
1. “Jacobi Conjugate Gradient” (JCG), recomandat pentru probleme bine condiţionate numeric, algoritm implementat pentru matrice reale şi complexe, simetrice şi nesimetrice;
2. “Preconditioned Conjugate Gradient” (PCG)implementat pentru matrice reale, simetrice şi pozitiv definite;
3. “Incomplete Choleski Conjugate Gradient” (ICCG)mai robust decât primele două, implementat pentru matrice reale şi complexe, simetrice şi nesimetrice.
PCG este de circa 4-10 ori mai rapid decât JCG, iar ICCG este în general mai rapid decât JCG.
27
1/12/2010
28
Metode aproximative
În metodele aproximative soluţia sistemului cu condiţiile la limită impuse, se determină ca sumă a seriei vectorilor {pj}
în care m este mai mic decât dimensiunea matricei [K] iar {pj } sunt corecţii succesive ale soluţiei. Valoarea de start a acestor vectori poate influenţa foarte mult numărul de iteraţii m.
Rata de convergenţă este proporţională cu rădăcina pătrată a numărului de condiţionare a matricei [K] , iar criteriul de convergenţă este de regulă
1 1 2 2 m mu a p a p ... a p
T
j j 2
T
R R
F F
Metode aproximative
în care
poate fi privit ca un reziduu pentru {uj} - vectorul deplasare determinat la pasul j. De obicei = 10-5 se consideră acceptabil pentru aplicaţii, dar poate fi redus dacă este necesar.
T
j j 2
T
R R
F F
j jR F K U
Metode aproximative
Pentru dimensiuni mari ale matricilor de rigiditate, care în general conţin multe zerouri (motiv pentru care se numesc şi "matrice rare" = “sparse”), tehnicile de operare cu acestea sau dovedit foarte eficiente pentru creşterea vitezei de calcul, prin înlăturarea operaţiilor aritmetice cu zero şi spaţiul necesar, deoarece pentru valorile nule nu se alocă spaţiu în memorie.
Metodele de rezolvare aproximativă, prin iterarea soluţiei, s-au dovedit a fi mult mai eficiente, în primul rând, ca viteză de calcul şi s-au impus odată cu creşterea memoriei centrale (RAM) a calculatoarelor.
Rezolvarea sistemelor de ecuaţii liniare cu legături
Condiţiile la limită în deplasări (şi rotiri) pot fi interpretate, din punct de vedere matematic, ca nişte restricţii asociate unui sistem de ecuaţii. Aceste restricţii pot fi relaţii simple de impunere a unor deplasări, sau relaţii cinematice între anumite grade de libertate.
Uneori acestea poartă denumirea de relaţii de legătură între mărimile nodale.
Rezolvarea sistemelor de ecuaţii liniare cu legături
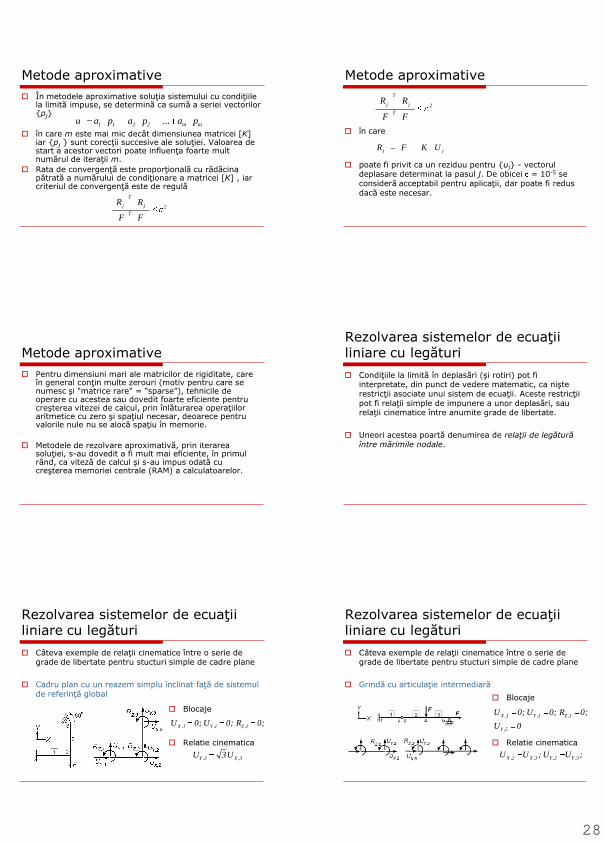
Câteva exemple de relaţii cinematice între o serie de grade de libertate pentru stucturi simple de cadre plane
Cadru plan cu un reazem simplu înclinat faţă de sistemul de referinţă global
Blocaje
Relatie cinematica
X ,1 Y ,1 Z ,1U 0; U 0; R 0;
Y ,3 X ,3U 3U
Rezolvarea sistemelor de ecuaţii liniare cu legături
Câteva exemple de relaţii cinematice între o serie de grade de libertate pentru stucturi simple de cadre plane
Grindă cu articulaţie intermediară
Blocaje
Relatie cinematica
X ,1 Y ,1 Z ,1
Y ,5
U 0; U 0; R 0;
U 0
X ,2 X ,3 Y ,2 Y ,3U U ; U U ;
28
1/12/2010
29
Rezolvarea sistemelor de ecuaţii liniare cu legături
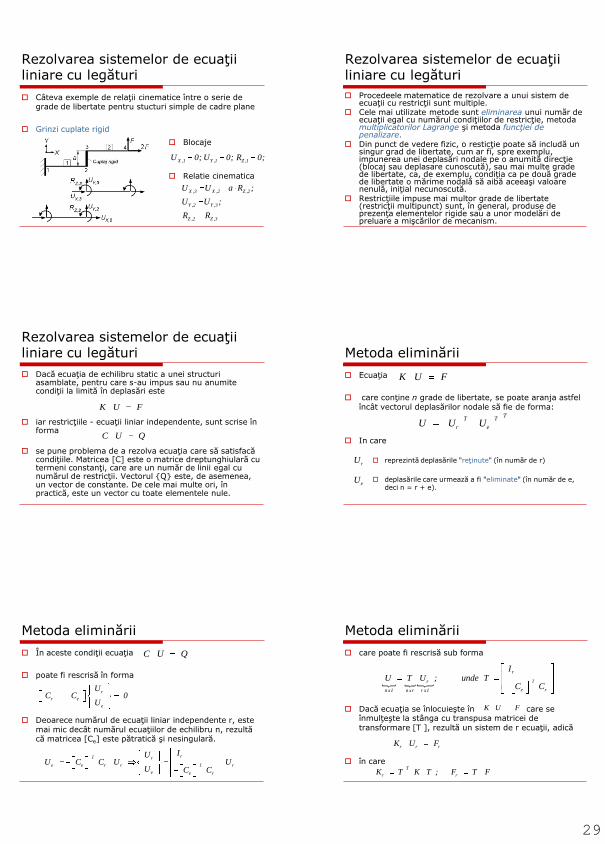
Câteva exemple de relaţii cinematice între o serie de grade de libertate pentru stucturi simple de cadre plane
Grinzi cuplate rigid
Blocaje
Relatie cinematica
X ,1 Y ,1 Z ,1U 0; U 0; R 0;
X ,3 X ,2 Z ,2
Y ,2 Y ,3
Z ,2 Z ,3
U U a R ;
U U ;
R R
Rezolvarea sistemelor de ecuaţii liniare cu legături
Procedeele matematice de rezolvare a unui sistem de ecuaţii cu restricţii sunt multiple.
Cele mai utilizate metode sunt eliminarea unui număr de ecuaţii egal cu numărul condiţiilor de restricţie, metoda multiplicatorilor Lagrange şi metoda funcţiei de penalizare.
Din punct de vedere fizic, o resticţie poate să includă un singur grad de libertate, cum ar fi, spre exemplu, impunerea unei deplasări nodale pe o anumită direcţie (blocaj sau deplasare cunoscută), sau mai multe grade de libertate, ca, de exemplu, condiţia ca pe două grade de libertate o mărime nodală să aibă aceeaşi valoare nenulă, iniţial necunoscută.
Restricţiile impuse mai multor grade de libertate (restricţii multipunct) sunt, în general, produse de prezenţa elementelor rigide sau a unor modelări de preluare a mişcărilor de mecanism.
Rezolvarea sistemelor de ecuaţii liniare cu legături
Dacă ecuaţia de echilibru static a unei structuri asamblate, pentru care s-au impus sau nu anumite condiţii la limită în deplasări este
iar restricţiile - ecuaţii liniar independente, sunt scrise în forma
se pune problema de a rezolva ecuaţia care să satisfacă condiţiile. Matricea [C] este o matrice dreptunghiulară cu termeni constanţi, care are un număr de linii egal cu numărul de restricţii. Vectorul {Q} este, de asemenea, un vector de constante. De cele mai multe ori, în practică, este un vector cu toate elementele nule.
K U F
C U Q
Metoda eliminării
Ecuaţia
care conţine n grade de libertate, se poate aranja astfel încât vectorul deplasărilor nodale să fie de forma:
In care
reprezintă deplasările "reţinute" (în număr de r)
deplasările care urmează a fi "eliminate" (în număr de e, deci n = r + e).
K U F
TT T
r eU U U
rU
eU
Metoda eliminării
În aceste condiţii ecuaţia
poate fi rescrisă în forma
Deoarece numărul de ecuaţii liniar independente r, este mai mic decât numărul ecuaţiilor de echilibru n, rezultă că matricea [Ce] este pătratică şi nesingulară.
C U Q
r
r e
e
UC C 0
U
r1 r
1e e r r r
e e r
IUU C C U U
U C C
Metoda eliminării
care poate fi rescrisă sub forma
Dacă ecuaţia se înlocuieşte în care se înmulţeşte la stânga cu transpusa matricei de transformare [T ], rezultă un sistem de r ecuaţii, adică
în care
r
1r
e rn x1 r x1n xr
IU T U ; unde T
C C
K U F
r r rK U F
T
r rK T K T ; F T F
29
1/12/2010
30
Metoda eliminării
Matricea [T ] se poate obţine şi în mod direct, prin formularea directă a relaţiei
Dacă deplasările impuse sunt nule, adică
{Ue} = {0}, atunci [Cr]=[Ir], [Ce]=[0],
şi matricea de rigiditate redusă se obţine prin eliminarea liniilor şi coloanelor corespunzătoate deplasărilor nule, adică corespunzatoare setului r
şi se ajunge la rezolvarea unui sistem de ecuaţii ordinare, prezentată în paragraful precedent.
r rrK K
Metoda multiplicatorilor Lagrange
Această metodă se bazează pe minimizarea unei funcţii în care variabilele nu sunt liniar independente. În cazul analizei structurale, se pleacă de la expresia potenţialului, rescris în forma matriceală
şi se obţine
adică la expresia potenţialului se adună ecuaţia restrictilor înmulţită cu vectorul { }T care reprezintă multiplicatorii Lagrange şi au semnificaţia unor forţe care "păstrează" echilibrul structurii.
T T1U K U U F
2
T T T1U K U U F C U Q
2
Metoda multiplicatorilor Lagrange
Condiţiile de staţionaritate a ecuaţiei, adică
care conduc la sistemul de ecuaţii
Acest sistem are dimensiunea n+r, mai mare decât a sistemului iniţial, iar pentru rezolvarea lui poate fi adaptată procedura de eliminare Gauss, deşi matricea care se triunghiularizează are termeni nuli pe diagonala principală.
0 0U
T U FK C
QC 0
Metoda funcţiei de penalizare
Această metodă conduce la determinarea aproximativă a necunoscutelor şi deci la satisfacerea aproximativă a restricţiilor, adică relaţia , se rescrie în forma
Mărimea suplimentară
din expresia potenţialului poartă denumirea de funcţie de penalizare.
C U Q
T T T1 1U K U U F r r
2 2
T1r r
2
Metoda funcţiei de penalizare
Matricea [ ] se alege de formă diagonală. Dacă expresia deci la satisfacerea aproximativă a restricţiilor se introduce în expresia potenţialului şi se pune condiţia de minim pentru potenţial
Se obtine
Matricea numita matrice de penalizare, se adaugă la matricea de rigiditate a structurii, iar vectorul . se aduna la vectorul incarcarilor nodale initiale
0U
T TK C C U F C Q
TC C
TC Q
Metoda funcţiei de penalizare
Dacă [ ] = [0] atunci restricţiile aplicate sunt neglijate. Dacă norma matricei [ ] creşte vectorul deplasărilor
nodale {U} se modifică în aşa fel încât restricţiile sunt din ce în ce mai bine ("aproape") satisfăcute. Este de dorit ca matricea [ ] să conţină termeni adimensionali, adică independenţi de gradele de libertate, care pot fi deplasări şi rotiri.
Această metodă păstrează nealterată dimensiunea iniţială a problemei, dar din cauza matricei [ ] , care trebuie să aibă termeni mult mai mari decât valorile rigidităţilor corespunzătoare diagonalei principale a matricei [K], poate conduce la apariţia unor probleme numerice, deoarece valoarea parametrului de condiţionare (numărul de condiţionare) a matricei creşte foarte mult şi aceasta poate deveni singulară.
TK C C
30
1/12/2010
31
Introducere
Elementele de rezistenţă ale unei structuri sunt în general solide. Un corp solid, la scară microscopică se compune din molecule, atomi, nuclee, electroni etc. Studiul corpurilor la scară microscopică, pentru a obţine comportarea de ansamblu, este dificil de abordat.
Este posibil însă, să se dezvolte o teorie fundamentată pe legi matematice şi fizice a mediului considerat continuu, care este verificată de comportarea experimentală a solidului deformabil. De obicei această teorie se completează cu o serie de ipoteze simplificatoare.
Dacă comportarea materialului, forţă - deformaţie, este descrisă de o relaţie elastică atunci se discută de teoria elasticităţii. Dacă însă comportarea materialului este în domeniul plastic se discută despre teoria plasticităţii.
Introducere
În continuare se prezintă câteva elemente de bază ale teoriei elasticităţii, pentru materiale cu comportare liniar elastică (în domeniul deformaţiilor mici), care se deformează foarte puţin în prezenţa încărcărilor (în domeniul deplasărilor mici), astfel încât ecuaţiile de echilibru se consideră pentru structura nedeformată.
Introducere
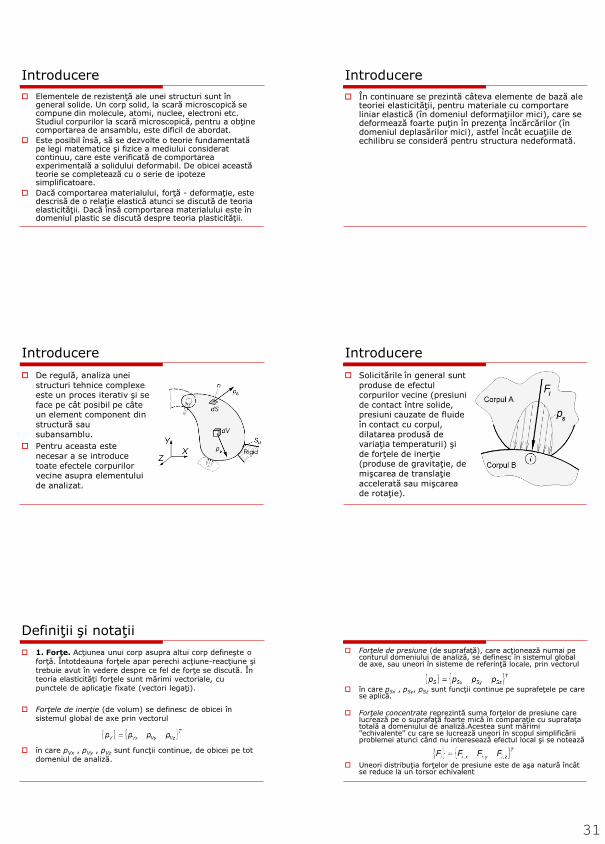
De regulă, analiza unei
structuri tehnice complexe este un proces iterativ şi se
face pe cât posibil pe câte un element component din
structură sau
subansamblu.
Pentru aceasta este
necesar a se introduce
toate efectele corpurilor vecine asupra elementului
de analizat.
Introducere
Solicitările în general sunt
produse de efectul corpurilor vecine (presiuni
de contact între solide, presiuni cauzate de fluide
în contact cu corpul,
dilatarea produsă de variaţia temperaturii) şi
de forţele de inerţie (produse de gravitaţie, de
mişcarea de translaţie
accelerată sau mişcarea de rotaţie).
Definiţii şi notaţii
1. Forţe. Acţiunea unui corp asupra altui corp defineşte o
forţă. Întotdeauna forţele apar perechi acţiune-reacţiune şi
trebuie avut în vedere despre ce fel de forţe se discută. În teoria elasticităţi forţele sunt mărimi vectoriale, cu
punctele de aplicaţie fixate (vectori legaţi).
Forţele de inerţie (de volum) se definesc de obicei în
sistemul global de axe prin vectorul
în care pVx , pVy , pVz sunt funcţii continue, de obicei pe tot
domeniul de analiză.
Forţele de presiune (de suprafaţă), care acţionează numai pe conturul domeniului de analiză, se definesc în sistemul global de axe, sau uneori în sisteme de referinţă locale, prin vectorul
în care pSx , pSy, pSz sunt funcţii continue pe suprafeţele pe care se aplică.
Forţele concentrate reprezintă suma forţelor de presiune care lucrează pe o suprafaţă foarte mică în comparaţie cu suprafaţa totală a domeniului de analiză.Acestea sunt mărimi "echivalente" cu care se lucrează uneori în scopul simplificării problemei atunci când nu interesează efectul local şi se notează
Uneori distribuţia forţelor de presiune este de aşa natură încât se reduce la un torsor echivalent
31
1/12/2010
32
2. Deplasări. Deplasarea defineşte modificarea poziţiei unui punct în raport cu un sistem de referinţă fix. Ea are o componentă elastică şi una de corp rigid.
Câmpul deplasărilor, se defineşte prin vectorul
în care u = u(x,y,z), v = v(x,y,z), w = w(x,y,z) reprezintă funcţiile deplasărilor liniare pe cele trei direcţii ale sistemului de referinţă considerat, de obicei, sistemul de referinţă global.
Pentru plăci, învelişuri şi bare se introduc şi rotirile, care împreună cu deplasările, formează deplasările generalizate.
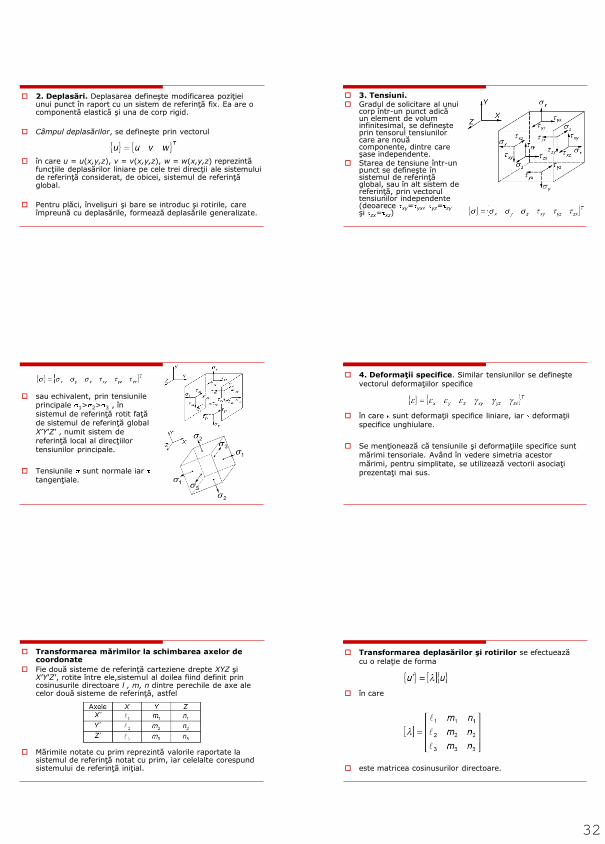
3. Tensiuni.
Gradul de solicitare al unui corp într-un punct adică un element de volum infinitesimal, se defineşte prin tensorul tensiunilor care are nouă componente, dintre care şase independente.
Starea de tensiune într-un punct se defineşte în sistemul de referinţă global, sau în alt sistem de referinţă, prin vectorul tensiunilor independente (deoarece xy= yx, yz= zyşi zx= xz)
sau echivalent, prin tensiunile principale 1> 2> 3 , în
sistemul de referinţă rotit faţă
de sistemul de referinţă global
X’Y’Z’ , numit sistem de
referinţă local al direcţiilor tensiunilor principale.
Tensiunile sunt normale iar
tangenţiale.
4. Deformaţii specifice. Similar tensiunilor se defineşte
vectorul deformaţiilor specifice
în care sunt deformaţii specifice liniare, iar deformaţii
specifice unghiulare.
Se menţionează că tensiunile şi deformaţiile specifice sunt
mărimi tensoriale. Având în vedere simetria acestor mărimi, pentru simplitate, se utilizează vectorii asociaţi
prezentaţi mai sus.
Transformarea mărimilor la schimbarea axelor de coordonate
Fie două sisteme de referinţă carteziene drepte XYZ şi X’Y’Z’, rotite între ele,sistemul al doilea fiind definit prin cosinusurile directoare l , m, n dintre perechile de axe ale celor două sisteme de referinţă, astfel
Mărimile notate cu prim reprezintă valorile raportate la sistemul de referinţă notat cu prim, iar celelalte corespund sistemului de referinţă iniţial.
Transformarea deplasărilor şi rotirilor se efectuează
cu o relaţie de forma
în care
este matricea cosinusurilor directoare.
32
1/12/2010
33
Transformarea tensiunilor se efectuează cu o relaţie de
forma
în care
Transformarea deformaţiilor specifice se efectuează cu
o relaţie de forma
în care
Observaţie! Pentru transformări între sisteme de
referinţă diferite, spre exemplu dintr-un sistem de referinţă cartezian într-un sistem de referinţă cilindric
sau sferic, expresiile matricelor de transformare [T ] şi [T ] de mai sus trebuie reformulate.
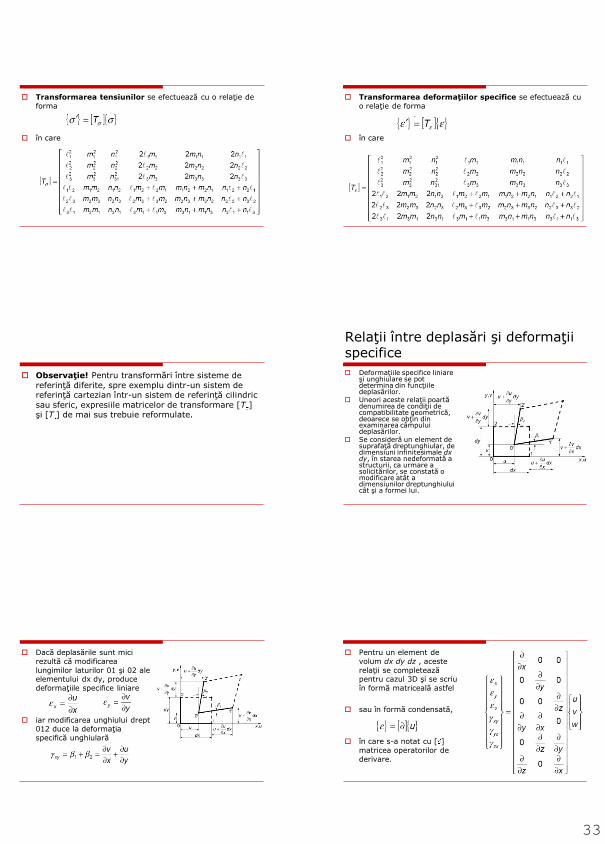
Relaţii între deplasări şi deformaţii specifice
Deformaţiile specifice liniare şi unghiulare se pot determina din funcţiile deplasărilor.
Uneori aceste relaţii poartă denumirea de condiţii de compatibilitate geometrică, deoarece se obţin din examinarea câmpului deplasărilor.
Se consideră un element de suprafaţă dreptunghiular, de dimensiuni infinitesimale dx dy, în starea nedeformată a structurii, ca urmare a solicitărilor, se constată o modificare atât a dimensiunilor dreptunghiului cât şi a formei lui.
Dacă deplasările sunt mici
rezultă că modificarea
lungimilor laturilor 01 şi 02 ale elementului dx dy, produce
deformaţiile specifice liniare
iar modificarea unghiului drept 012 duce la deformaţia
specifică unghiulară
Pentru un element de
volum dx dy dz , aceste
relaţii se completează pentru cazul 3D şi se scriu
în formă matriceală astfel
sau în formă condensată,
în care s-a notat cu [ ]
matricea operatorilor de
derivare.
33
1/12/2010
34
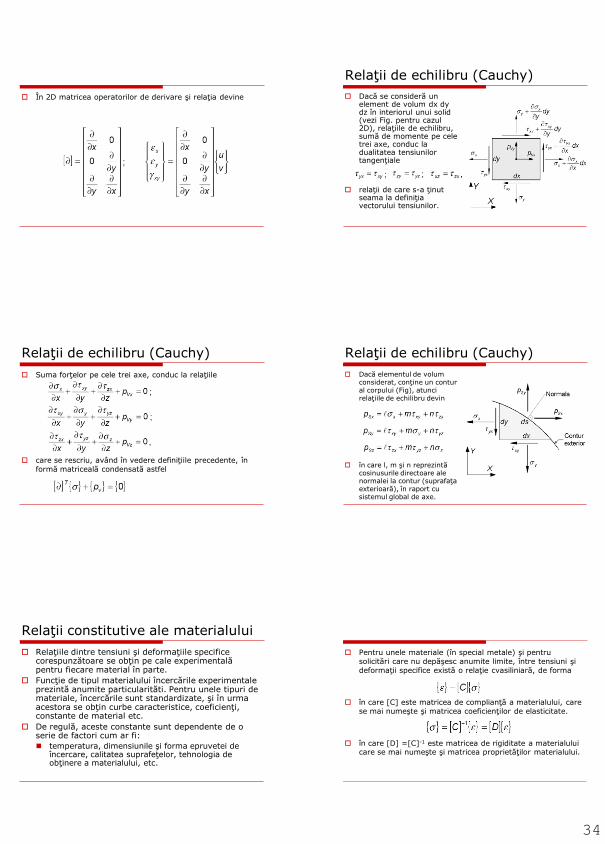
În 2D matricea operatorilor de derivare şi relaţia devine
Relaţii de echilibru (Cauchy)
Dacă se consideră un element de volum dx dy dz în interiorul unui solid (vezi Fig. pentru cazul 2D), relaţiile de echilibru, sumă de momente pe cele trei axe, conduc la dualitatea tensiunilor tangenţiale
relaţii de care s-a ţinut seama la definiţia vectorului tensiunilor.
Relaţii de echilibru (Cauchy)
Suma forţelor pe cele trei axe, conduc la relaţiile
care se rescriu, având în vedere definiţiile precedente, în
formă matriceală condensată astfel
Relaţii de echilibru (Cauchy)
Dacă elementul de volum considerat, conţine un contur al corpului (Fig), atunci relaţiile de echilibru devin
în care l, m şi n reprezintă cosinusurile directoare ale normalei la contur (suprafaţa exterioară), în raport cu sistemul global de axe.
Relaţii constitutive ale materialului
Relaţiile dintre tensiuni şi deformaţiile specifice corespunzătoare se obţin pe cale experimentală pentru fiecare material în parte.
Funcţie de tipul materialului încercările experimentale prezintă anumite particularităti. Pentru unele tipuri de materiale, încercările sunt standardizate, şi în urma acestora se obţin curbe caracteristice, coeficienţi, constante de material etc.
De regulă, aceste constante sunt dependente de o serie de factori cum ar fi:
temperatura, dimensiunile şi forma epruvetei de încercare, calitatea suprafeţelor, tehnologia de obţinere a materialului, etc.
Pentru unele materiale (în special metale) şi pentru
solicitări care nu depăşesc anumite limite, între tensiuni şi
deformaţii specifice există o relaţie cvasiliniară, de forma
în care [C] este matricea de complianţă a materialului, care
se mai numeşte şi matricea coeficienţilor de elasticitate.
în care [D] =[C]-1 este matricea de rigiditate a materialului care se mai numeşte şi matricea proprietăţilor materialului.
34

1/12/2010
35
Pentru un material anizotrop matricea de complianţă [C]
este simetrică şi conţine 21 de constante independente,
adică
Pentru un material ortotrop în coordonate carteziene, cu
direcţiile principale de-a lungul axelor, conform relaţiilor
generalizate ale lui Hooke, rezultă
Din motive de simetrie există relaţiile
astfel încât din cele 12 constante de material, nouă sunt independente.
Pentru un material izotrop, ţinând seama de relaţia dintre
modulul de elasticitate longitudinal E, transversal G şi coeficientul de contracţie transversală , adică
rezultă
din care, prin inversare, rezultă matricea de rigiditate a materialului omogen, liniar şi izotrop
Observaţie! Pentru sistemul de referinţă cilindric, utilizat pentru structurile axial simetrice, relaţiile au alte forme.
Pentru cazul 2D, există două formulări distincte:
a) Stare plană de tensiuni (SPT), dacă z= yz= xz=0
b) Stare plană de deformaţie (SPD), dacă z= xz= yz=0
35

1/12/2010
36
Expresii energetice
1. Lucrul mecanic. Lucrul mecanic este suma dintre produsul forţelor şi deplasările produse pe direcţiile lor. În continuare, se are în vedere lucrul mecanic al forţelor care produc deplasări elastice, deci se consideră că domeniul de analiză nu are deplasări de corp rigid.
Forţele aplicate unui element de volum dV, pot fi forţe exterioare (forţe de volum, forţe de suprafaţă sau forţe echivalente concentrate) şi forţe interioare (tensiuni), toate considerate constante.
Lucrul mecanic al forţelor de volum, se scrie
similar, lucrul mecanic al forţelor de suprafaţă, rezultă
iar lucrul mecanic al forţelor concentrate este
2. Energia potenţială de deformaţie. Un corp liniar
elastic, acumulează o energie internă, exprimată prin
3. Energia potenţială a forţelor exterioare. Această
energie notată Wp, se defineşte prin
Dacă se consideră, drept forţe exterioare, forţele de
volum şi forţele de suprafaţă, energia potenţială a forţelor exterioare se scrie
Metode energetice în analiza structurilor
Pentru obţinerea stării de tensiuni şi deformaţii, în teoria elasticităţii trebuie să se ţină seama de patru tipuri de ecuaţii, care în domeniul liniar elastic al deplasărilor mici sunt: 1. relaţii de echilibru (Cauchy), adică pentru orice punct din
domeniul de analiză
2. relaţii de compatibilitate geometrică între deplasări şi deformaţii specifice
3. relaţii constitutive ale materialului
4. condiţii la limită în forţe şi deplasări (forţe de inerţie, presiuni, variaţii de temperatură, deformaţii sau tensiuni iniţiale cunoscute, deplasări impuse etc).
Metode energetice în analiza structurilor
Ecuaţiile diferenţiale care descriu un fenomen fizic se spune că definesc problema în formă "exactă" ("strong form"), pentru că ele sunt valabile pentru toate punctele din domeniul de analiză.
O funcţională, care implicit conţine ecuaţiile diferenţiale, se spune că descrie problema în formă "slabă" ("weak form"), deoarece satisface anumite condiţii la nivel global (în sensul unei medieri pe domeniul de analiză).
Metode energetice în analiza structurilor
Metoda elementelor finite este o metodă aproximativă de rezolvare a ecuaţiilor cu derivate parţiale care se bazează pe "echivalarea" mediului continuu printr-un model de calcul discret.
Ecuaţiile diferenţiale sunt transformate în ecuaţii liniare. Mărimile care definesc o problemă prin funcţii continue (o infinitate de valori) se limitează la un număr finit de necunoscute - grade de libertate, alese arbitrar de analist.
Gradele de libertate sunt mărimi (cantitative) independente, utilizate pentru a defini configuraţia unui sistem.
În MEF gradele de libertate reprezintă mărimi utilizate pentru definirea variaţiei spaţiale a unui domeniu de analiză.
36
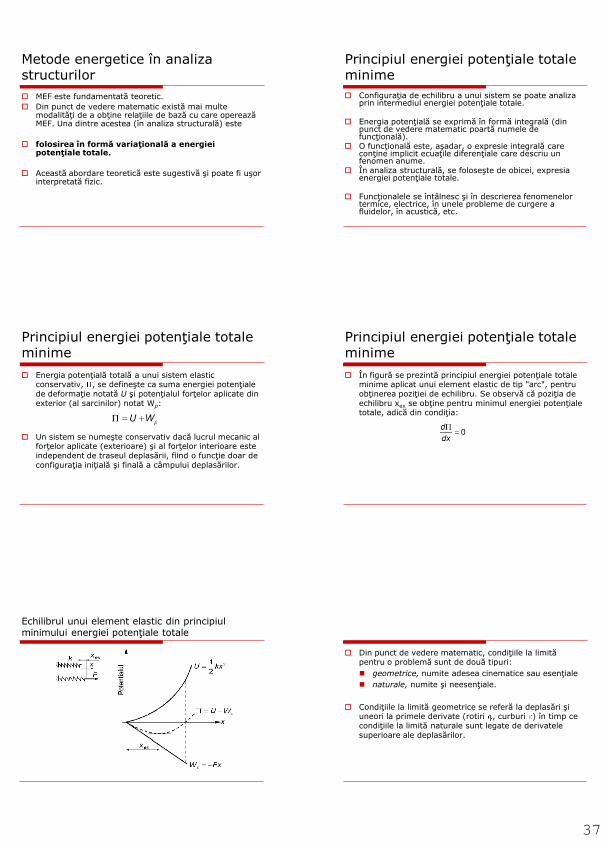
1/12/2010
37
Metode energetice în analiza structurilor
MEF este fundamentată teoretic.
Din punct de vedere matematic există mai multe modalităţi de a obţine relaţiile de bază cu care operează MEF. Una dintre acestea (în analiza structurală) este
folosirea în formă variaţională a energiei potenţiale totale.
Această abordare teoretică este sugestivă şi poate fi uşor interpretată fizic.
Principiul energiei potenţiale totale minime
Configuraţia de echilibru a unui sistem se poate analiza prin intermediul energiei potenţiale totale.
Energia potenţială se exprimă în formă integrală (din punct de vedere matematic poartă numele de funcţională).
O funcţională este, aşadar, o expresie integrală care conţine implicit ecuaţile diferenţiale care descriu un fenomen anume.
În analiza structurală, se foloseşte de obicei, expresia energiei potenţiale totale.
Funcţionalele se întâlnesc şi în descrierea fenomenelor termice, electrice, în unele probleme de curgere a fluidelor, în acustică, etc.
Principiul energiei potenţiale totale minime
Energia potenţială totală a unui sistem elastic conservativ, , se defineşte ca suma energiei potenţiale de deformaţie notată U şi potenţialul forţelor aplicate din exterior (al sarcinilor) notat Wp:
Un sistem se numeşte conservativ dacă lucrul mecanic al forţelor aplicate (exterioare) şi al forţelor interioare este independent de traseul deplasării, fiind o funcţie doar de configuraţia iniţială şi finală a câmpului deplasărilor.
Principiul energiei potenţiale totale minime
În figură se prezintă principiul energiei potenţiale totale minime aplicat unui element elastic de tip "arc", pentru obţinerea poziţiei de echilibru. Se observă că poziţia de echilibru xex se obţine pentru minimul energiei potenţiale totale, adică din condiţia:
Echilibrul unui element elastic din principiul minimului energiei potenţiale totale
Din punct de vedere matematic, condiţiile la limită pentru o problemă sunt de două tipuri:
geometrice, numite adesea cinematice sau esenţiale
naturale, numite şi neesenţiale.
Condiţiile la limită geometrice se referă la deplasări şi uneori la primele derivate (rotiri , curburi ) în timp ce condiţiile la limită naturale sunt legate de derivatele superioare ale deplasărilor.
37
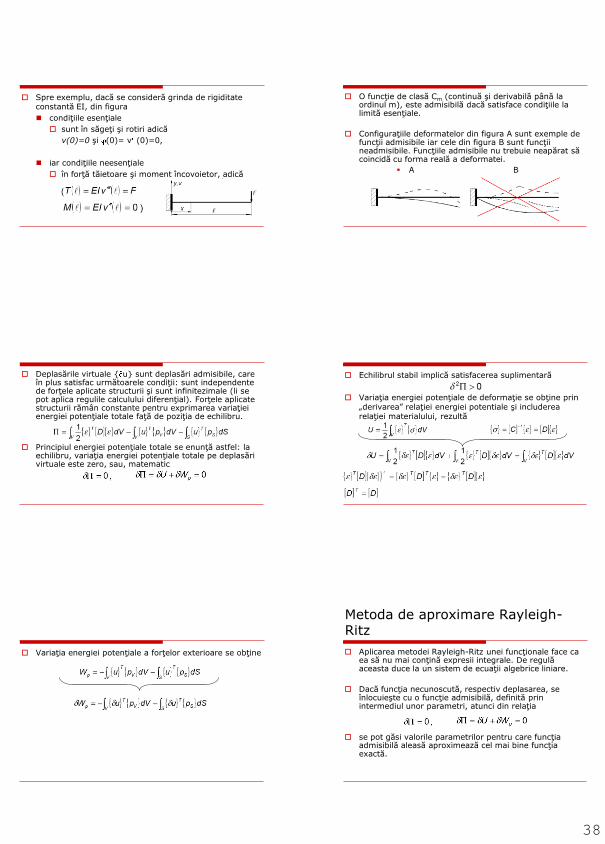
1/12/2010
38
Spre exemplu, dacă se consideră grinda de rigiditate constantă EI, din figura
condiţiile esenţiale
sunt în săgeţi şi rotiri adică
v(0)=0 şi (0)= v (0)=0,
iar condiţiile neesenţiale
în forţă tăietoare şi moment încovoietor, adică
O funcţie de clasă Cm (continuă şi derivabilă până la ordinul m), este admisibilă dacă satisface condiţiile la limită esenţiale.
Configuraţiile deformatelor din figura A sunt exemple de funcţii admisibile iar cele din figura B sunt funcţii neadmisibile. Funcţiile admisibile nu trebuie neapărat să coincidă cu forma reală a deformatei.
A B
Deplasările virtuale { u} sunt deplasări admisibile, care în plus satisfac următoarele condiţii: sunt independente de forţele aplicate structurii şi sunt infinitezimale (li se pot aplica regulile calculului diferenţial). Forţele aplicate structurii rămân constante pentru exprimarea variaţiei energiei potenţiale totale faţă de poziţia de echilibru.
Principiul energiei potenţiale totale se enunţă astfel: la echilibru, variaţia energiei potenţiale totale pe deplasări virtuale este zero, sau, matematic
Echilibrul stabil implică satisfacerea suplimentară
Variaţia energiei potenţiale de deformaţie se obţine prin „derivarea” relaţiei energiei potentiale şi includerea relaţiei materialului, rezultă
Variaţia energiei potenţiale a forţelor exterioare se obţine
Metoda de aproximare Rayleigh-Ritz
Aplicarea metodei Rayleigh-Ritz unei funcţionale face ca ea să nu mai conţină expresii integrale. De regulă aceasta duce la un sistem de ecuaţii algebrice liniare.
Dacă funcţia necunoscută, respectiv deplasarea, se înlocuieşte cu o funcţie admisibilă, definită prin intermediul unor parametri, atunci din relaţia
se pot găsi valorile parametrilor pentru care funcţia admisibilă aleasă aproximează cel mai bine funcţia exactă.
38

1/12/2010
39
Exemplul 1. Grindă simplu rezemată solicitată cu o sarcină uniform distribuită
Se consideră grinda simplu rezemată, de rigiditate constantă EI din figură, care este încărcată cu o sarcină uniform distribuită. Dacă se doreşte obţinerea săgeţii maxime (neglijând efectul forţei tăietoare), se poate alege drept funcţie admisibilă
care satisface condiţiile la limită esenţiale.
Exemplul 1. Grindă simplu rezemată solicitată cu o sarcină uniform distribuită
În expresia
se introduc relaţiile
şi expresia potenţialului devine
Exemplul 1. Grindă simplu rezemată solicitată cu o sarcină uniform distribuită
Efectuând calculele, din condiţia
se obtine
Exemplul 1. Grindă simplu rezemată solicitată cu o sarcină uniform distribuită
Expresia exactă a săgeţii maxime se obţine dacă funcţia admisibilă coincide cu funcţia exactă, adică un polinom de gradul patru. Deci, dacă se alege o funcţie admisibilă adecvată, metoda aproximativă Rayleigh-Ritz poate conduce şi la soluţii exacte.
Exemplul 2. Grindă simplu rezemată solicitată cu o sarcină distribuită liniar
Pentru grinda din figura, ecuaţia fibrei medii deformate se aproximează cu polinoame de ordinul doi, trei, patru şi cinci. Aplicând metoda Rayleigh-Ritz, săgeata maximă vm se obţine pentru x=x0 şi se prezintă
Exemplul 2. Grindă simplu rezemată solicitată cu o sarcină distribuită liniar
Pentru polinomul de ordinul trei, calculele decurg astfel:
deoarece v(0) =v (l) = 0, rezultă că polinomul are doar două constante independente;
alegând polinomul prin eliminarea constantelor a şi b, rezultă
înlocuind în expresia energiei potenţiale totale rezultă
39

1/12/2010
40
Exemplul 2. Grindă simplu rezemată solicitată cu o sarcină distribuită liniar
condiţiile de minim pentru energia potenţială totală,
conduc la sistemul de ecuaţii liniare
de unde rezulta
Exemplul 2. Grindă simplu rezemată solicitată cu o sarcină distribuită liniar
Expresia fibrei medii deformate devine
iar săgeata maximă se obţine pentru v (x)=0, adică pentru x0=516611l, şi are valoarea
Deci, metoda Rayleigh-Ritz conduce către un sistem de ecuaţii liniare în care necunoscute sunt parametrii care definesc funcţia aleasă pentru aproximare.
Exemplul 2. Grindă simplu rezemată solicitată cu o sarcină distribuită liniar
Funcţii de aproximare pentru fibra medie deformată a aplicaţiei
Scurtă prezentare a metodei elementelor finite
Metoda elementelor finite: variantă localizată a metodei Rayleigh-Ritz
Deoarece alegerea unei funcţii de aproximare valabilă pe întreg domeniul de analiză nu se poate adopta decât în anumite cazuri particulare, metoda elementelor finite, lucrează cu funcţii de aproximare pe subdomenii (elemente finite, în total NE).
În virtutea proprietăţiilor integralelor sau a însumării energiilor componentelor, energia potenţială totală, pentru toate cele NE elemente finite, se exprimă astfel
Metoda elementelor finite: variantă localizată a metodei Rayleigh-Ritz
iar principiul energiei potenţiale totale minime devine
Având în vedere că energia potenţială totală a unui element este strict pozitivă, din relaţia rezultă
relaţie care stă la baza ecuaţiei statice a fiecărui element finit. Domeniul de analiză se poate discretiza în elemente de acelaşi tip, de exemplu elemente de placă, triunghiulare, cu trei noduri sau în elemente finite de tipuri diferite (bare, plăci şi solide). Pentru fiecare tip de element finit se face o investigare matematică separată.
Metoda elementelor finite: variantă localizată a metodei Rayleigh-Ritz
Câmpul deplasărilor pentru un element finit {ue (x y z)}, se aproximează prin funcţii admisibile [N (x y z)], denumite funcţii de interpolare sau funcţii de formă, valabile pe tot domeniul elementului.
Dacă deplasările nodale sunt {Ue} , atunci se poate demonstra că există o relaţie de forma
sau în formă condensată
de unde rezultă
40
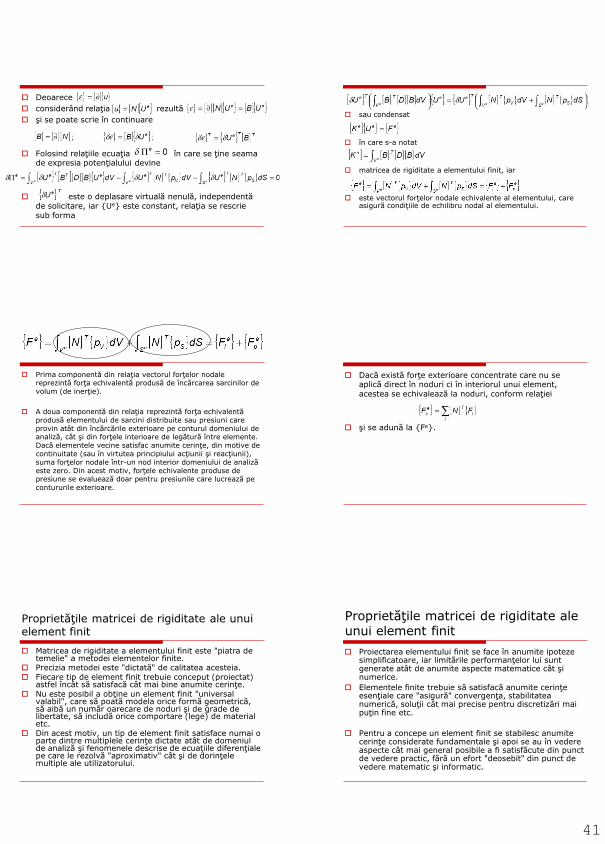
1/12/2010
41
Deoarece
considerând relaţia rezultă
şi se poate scrie în continuare
Folosind relaţiile ecuaţia în care se ţine seama de expresia potenţialului devine
este o deplasare virtuală nenulă, independentă de solicitare, iar {Ue} este constant, relaţia se rescrie sub forma
sau condensat
în care s-a notat
matricea de rigiditate a elementului finit, iar
este vectorul forţelor nodale echivalente al elementului, care asigură condiţiile de echilibru nodal al elementului.
Prima componentă din relaţia vectorul forţelor nodale reprezintă forţa echivalentă produsă de încărcarea sarcinilor de volum (de inerţie).
A doua componentă din relaţia reprezintă forţa echivalentă produsă elementului de sarcini distribuite sau presiuni care provin atât din încărcările exterioare pe conturul domeniului de analiză, cât şi din forţele interioare de legătură între elemente. Dacă elementele vecine satisfac anumite cerinţe, din motive de continuitate (sau în virtutea principiului acţiunii şi reacţiunii), suma forţelor nodale într-un nod interior domeniului de analiză este zero. Din acest motiv, forţele echivalente produse de presiune se evaluează doar pentru presiunile care lucrează pe contururile exterioare.
Dacă există forţe exterioare concentrate care nu se aplică direct în noduri ci în interiorul unui element, acestea se echivalează la noduri, conform relaţiei
şi se adună la {Fe}.
Proprietăţile matricei de rigiditate ale unui element finit
Matricea de rigiditate a elementului finit este "piatra de temelie" a metodei elementelor finite.
Precizia metodei este "dictată" de calitatea acesteia. Fiecare tip de element finit trebuie conceput (proiectat)
astfel încât să satisfacă cât mai bine anumite cerinţe. Nu este posibil a obţine un element finit "universal
valabil", care să poată modela orice formă geometrică, să aibă un număr oarecare de noduri şi de grade de libertate, să includă orice comportare (lege) de material etc.
Din acest motiv, un tip de element finit satisface numai o parte dintre multiplele cerinţe dictate atât de domeniul de analiză şi fenomenele descrise de ecuaţiile diferenţiale pe care le rezolvă "aproximativ" cât şi de dorinţele multiple ale utilizatorului.
Proprietăţile matricei de rigiditate ale unui element finit
Proiectarea elementului finit se face în anumite ipoteze simplificatoare, iar limitările performanţelor lui sunt generate atât de anumite aspecte matematice cât şi numerice.
Elementele finite trebuie să satisfacă anumite cerinţe esenţiale care "asigură" convergenţa, stabilitatea numerică, soluţii cât mai precise pentru discretizări mai puţin fine etc.
Pentru a concepe un element finit se stabilesc anumite cerinţe considerate fundamentale şi apoi se au în vedere aspecte cât mai general posibile a fi satisfăcute din punct de vedere practic, fără un efort "deosebit" din punct de vedere matematic şi informatic.
41
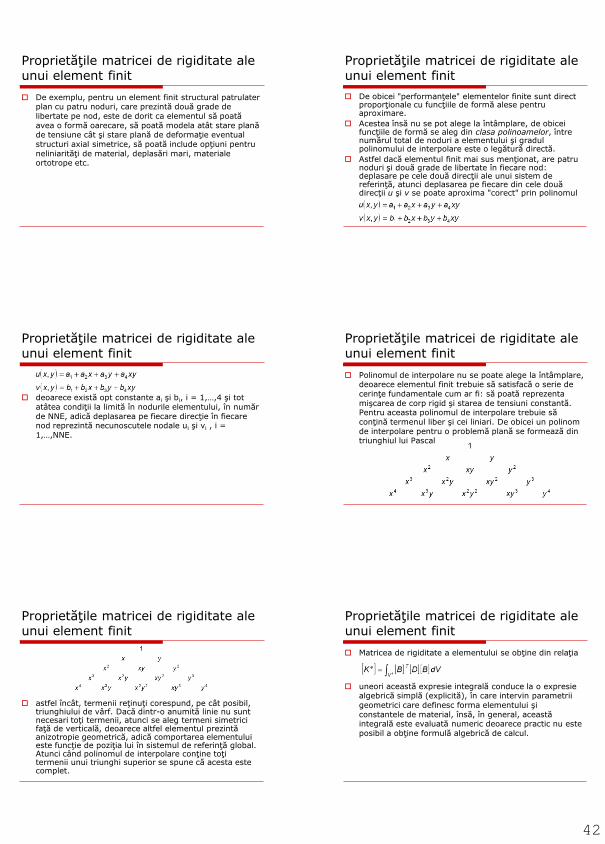
1/12/2010
42
Proprietăţile matricei de rigiditate ale unui element finit
De exemplu, pentru un element finit structural patrulater plan cu patru noduri, care prezintă două grade de libertate pe nod, este de dorit ca elementul să poată avea o formă oarecare, să poată modela atât stare plană de tensiune cât şi stare plană de deformaţie eventual structuri axial simetrice, să poată include opţiuni pentru neliniarităţi de material, deplasări mari, materiale ortotrope etc.
Proprietăţile matricei de rigiditate ale unui element finit
De obicei "performanţele" elementelor finite sunt direct proporţionale cu funcţiile de formă alese pentru aproximare.
Acestea însă nu se pot alege la întâmplare, de obicei funcţiile de formă se aleg din clasa polinoamelor, între numărul total de noduri a elementului şi gradul polinomului de interpolare este o legătură directă.
Astfel dacă elementul finit mai sus menţionat, are patru noduri şi două grade de libertate în fiecare nod: deplasare pe cele două direcţii ale unui sistem de referinţă, atunci deplasarea pe fiecare din cele două direcţii u şi v se poate aproxima "corect" prin polinomul
Proprietăţile matricei de rigiditate ale unui element finit
deoarece există opt constante ai şi bi, i = 1,…,4 şi tot atâtea condiţii la limită în nodurile elementului, în număr de NNE, adică deplasarea pe fiecare direcţie în fiecare nod reprezintă necunoscutele nodale ui şi vi , i = 1,…,NNE.
Proprietăţile matricei de rigiditate ale unui element finit
Polinomul de interpolare nu se poate alege la întâmplare, deoarece elementul finit trebuie să satisfacă o serie de cerinţe fundamentale cum ar fi: să poată reprezenta mişcarea de corp rigid şi starea de tensiuni constantă. Pentru aceasta polinomul de interpolare trebuie să conţină termenul liber şi cei liniari. De obicei un polinom de interpolare pentru o problemă plană se formează din triunghiul lui Pascal
Proprietăţile matricei de rigiditate ale unui element finit
astfel încât, termenii reţinuţi corespund, pe cât posibil, triunghiului de vârf. Dacă dintr-o anumită linie nu sunt necesari toţi termenii, atunci se aleg termeni simetrici faţă de verticală, deoarece altfel elementul prezintă anizotropie geometrică, adică comportarea elementului este funcţie de poziţia lui în sistemul de referinţă global. Atunci când polinomul de interpolare conţine toţi termenii unui triunghi superior se spune că acesta este complet.
Proprietăţile matricei de rigiditate ale unui element finit
Matricea de rigiditate a elementului se obţine din relaţia
uneori această expresie integrală conduce la o expresie algebrică simplă (explicită), în care intervin parametrii geometrici care definesc forma elementului şi constantele de material, însă, în general, această integrală este evaluată numeric deoarece practic nu este posibil a obţine formulă algebrică de calcul.
42

1/12/2010
43
Proprietăţile matricei de rigiditate ale unui element finit
Matricea de rigiditate a elementului [Ke] are următoarele proprietăţi: simetrie faţă de diagonala principală, ca urmare a
teoremei reciprocităţii forţelor; termeni pozitivi pe diagonala principală; dimensiunea matricei este egală cu produsul dintre
numărul total de noduri al elementului şi numărul de grade de libertate pe nod, adică NNE*GLN;
matricea este singulară, (deficientă de rang pentru că trebuie să reprezinte mişcarea de corp rigid, uneori, din motive de integrare ea poate să prezinte şi mişcări de mecanism), se spune că matricea de rigiditate a elementului este semipozitiv definită deoarece energia potenţială asociată unor deplasări nodale aleatoare
Asamblarea ecuaţiilor de echilibru ale elementelor
Folosind relaţia
în care se înlocuieşte relaţia
pentru întreg domeniul de analiză se obţine considerând
Asamblarea ecuaţiilor de echilibru ale elementelor
Dacă vectorul deplasărilor nodale ale fiecărui element {Ue} se exprimă funcţie de vectorul deplasărilor corespunzător întregului domeniu de analiză {U} , prin intermediul matricei de conectivitate [~Te ] adică:
se obţin relaţiile
care înlocuite conduc la
Asamblarea ecuaţiilor de echilibru ale elementelor
de unde rezultă (deoarece { U}T {0} ) ecuaţia globală de echilibru, pentru domeniul discretizat
în care [K] este matricea de rigiditate a structurii şi se obţine prin asamblarea matricelor de rigiditate ale elementelor, adică adunarea matricelor de rigiditate "expandate" ale elementelor, [~Ke]:
{F} este vectorul încărcărilor nodale al structurii şi se obţine prin asamblarea încărcărilor echivalente ale elementelor, adică adunarea încărcărilor "expandate" ale elementelor {~Fe} , în care se includ numai forţele exterioare:
Asamblarea ecuaţiilor de echilibru ale elementelor
[K] este matricea de rigiditate a structurii
{F} este vectorul încărcărilor nodale al structurii
Practic asamblarea se realizează fără "expandarea" matricelor de rigiditate şi a vectorilor încărcărilor, prin aşa numita asamblare directă, care ţine seama de matricea de conectivitate a structurii.
Asamblarea ecuaţiilor de echilibru ale elementelor
Dacă matricea de rigiditate şi vectorul forţelor echivalente în nodurile elementeului se determină într-un sistem de referinţă diferit de sistemul de referinţă global (în SRL) atunci matricea de rigiditate a elementului în SRG [Ke] se obţine din maticea de rigiditate în SRL [ke] folosind relaţia de transformare
similar, vectorul forţelor {Fe} se obţine din {fe} prin
în care [Te] este matricea de transformare, uneori numită şi matricea de rotaţie a coordonatelor, de aceeaşi dimensiune ca matricea de rigiditate şi care conţine pe diagonală blocuri ale matricelor cosinusurilor directoare [ i]
43


















