
MELT10: Real-Time Indoor Mapping for Mobile Robots with Limited
15
MELT10: Real-Time Indoor Mapping for Mobile Robots with Limited Sensing Ying Zhang, Juan Liu and Gabriel Hoffmann Palo Alto Research Center Palo Alto, CA, 94304 Mark Quilling, Kenneth Payne, Prasanta Bose and Andrew Zimdars Lockheed Martin Space Systems Center Sunnyvale, CA, 94089 © 2010 PARC
Transcript of MELT10: Real-Time Indoor Mapping for Mobile Robots with Limited
MELT10: Real-Time Indoor Mapping for Mobile Robots with Limited Sensing Ying Zhang, Juan Liu and Gabriel Hoffmann Palo Alto Research Center Palo Alto, CA, 94304 Mark Quilling, Kenneth Payne, Prasanta Bose and Andrew Zimdars Lockheed Martin Space Systems Center Sunnyvale, CA, 94089
© 2010 PARC

Overview
• Motivation • Formalization • Solution • Experimentation • Conclusion
PARC | 2
Landroids DARPA 2007 - 2010
G 2
3 1 4 8
7 5
6 21
23 22

Motivation
PARC | 3
• Target Applications: • Robotic Relay and Sensing Networks, with • Small and cheap robotic platforms
• Requirements: • Mapping and localization with short-range
sensors • Real-time and efficient solutions

Platform
PARC | 4
Bumpers Wall IR Sensor

Approach
• Wall Following – Never being trapped – Coverage guaranteed
• Outline Mapping – Efficient representation for small platforms – Effective use of environment constraints to
compensate sensing noise – Efficient loop detection and map merging
• Algorithms – Segmentation – Rectification
PARC | 5
Outline Map

Segmentation • Input: trajectory points (x, y, bl, wr) • Output: line segments (length, θ, turn)
• Why trace segmentation? – Saves computation, work on line segments which are much fewer
than individual trajectory points – Even out noise for wall-following robots.
• Algorithm: line-growing algorithm Grow a line as much as you can unless – Bumper/wall sensor suggests a turn, or – A sharp angle with respect to the current orientation is identified.
d
p0
pi
pi+1

PARC | 7
Challenge
Noisy Odometry
Floor Plan
Hallway

Rectification
• Assumption: Most indoor corners are rectilinear • Conclusion: Only need to classify any turn angle into
(0, 90, 180, 270) degrees. • Solution: Simple but cannot handle pathological case! • Probabilistic state-based (with past history) estimation
– Get over the pathological case – Works around obstacles – Can accommodate non-rectilinear angles

Formalization
Two models needed: (why?) • Dynamics model
• Observation likelihood model: – Angle noise model:
n is noise, modeled as Generalized Gaussian Distributed (GGD) why --- heavy tail to handle large noise
– Turning type model:
• History based state: s =
⎩⎨⎧ −
=consistentconsistentnon
sZp turn
15.0
)|(
State Obs: (θ, turn type)

Real-time Mapping • Each hypothesis is a line segment map • Given a new segment, each hypothesis forks into four possibilities:
straight, left, right, U-turn • Compute each new hypothesis and keep up to N (100) best
hypotheses • Return the most probable hypothesis as the final mapping result.
-30 -20 -10 0 10 20 30 40 50 60 70
-80
-70
-60
-50
-40
-30
-20
-10
0
prob= 0.15
-30 -20 -10 0 10 20 30 40 50 60 70
-80
-70
-60
-50
-40
-30
-20
-10
0
prob= 0.12

Outline Map Features
Decreasing θ
Feature Correlation from Two Maps Feature Match
Loop Detection
Map Merging
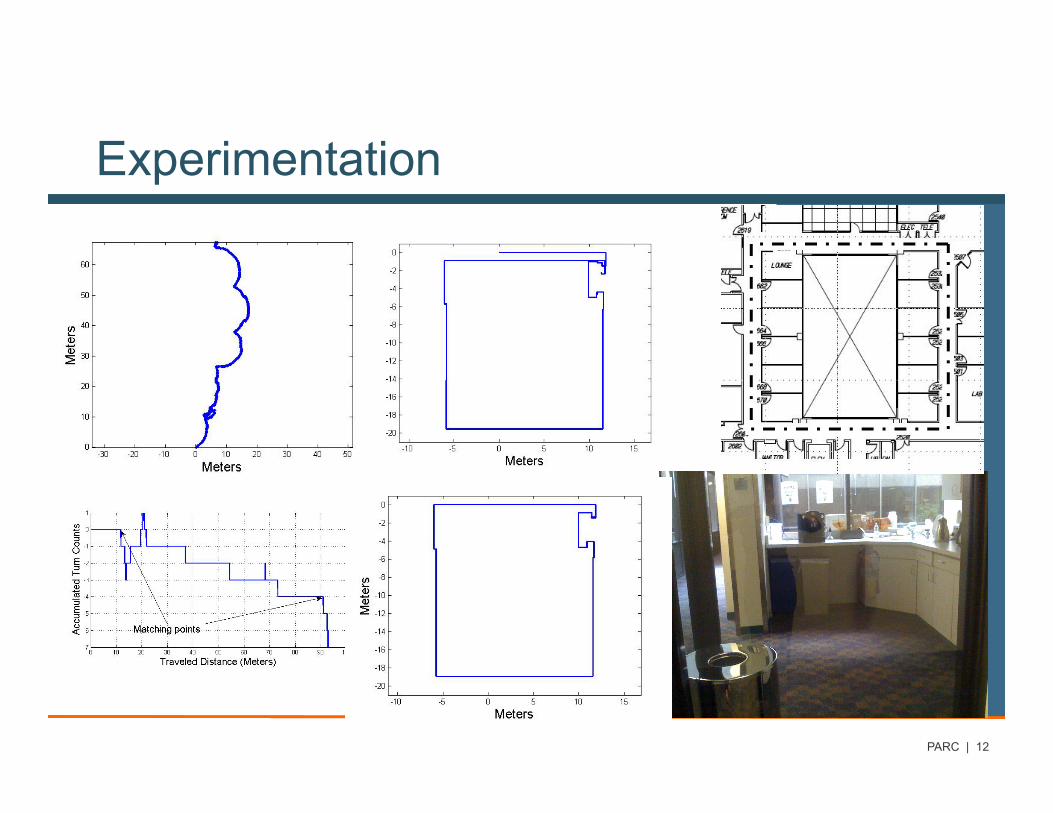
Experimentation
PARC | 12

PARC | 13
Demonstration

Future Work
• Loop Detection • Loop Closing • Map Merging • Map Annotation • Map-Guided Navigation • Map-Guided Deployment
PARC | 14

Conclusion
PARC | 15
• Simple yet Powerful Indoor Map Representation
• Efficient Computation based-on Probabilistic Modeling and Reasoning
• Reliable System Integration with Real Demonstrations
Thanks to: DARPA LANdroids Project

















![Using Robots and SLAM for Indoor Wi-Fi Mapping in …1 Using Robots and SLAM for Indoor Wi-Fi Mapping in Indoor Geolocation [Extended Report] A Major Qualifying Project Report Submitted](https://static.fdocuments.in/doc/165x107/5f5a3f0946954b67e9462c68/using-robots-and-slam-for-indoor-wi-fi-mapping-in-1-using-robots-and-slam-for-indoor.jpg)
