MEHANIKA VO NJE - Odsek za puteve, eleznice i aerodrome · Poduºna dinamika ²inskih vozila...
112
Transcript of MEHANIKA VO NJE - Odsek za puteve, eleznice i aerodrome · Poduºna dinamika ²inskih vozila...

Poduºna dinamika ²inskih vozilaKretanje voza u krivini
Interakcija ²inskih vozila i kolosekaVinklerova podloga
Naponski talasi u tlu
MEHANIKA VO�NJE
Odsek za puteve, ºeleznice i aerodrome
Prof dr Stanko Br£i¢Doc dr Stanko �ori¢Doc dr Anina Glumac
Gra�evinski fakultetUniverzitet u Beogradu
�k. god. 2018/19
S.�ori¢ Mehanika voºnje

Poduºna dinamika ²inskih vozilaKretanje voza u krivini
Interakcija ²inskih vozila i kolosekaVinklerova podloga
Naponski talasi u tlu
Sadrºaj
1 Poduºna dinamika ²inskih vozilaVoz kao jedna materijalna ta£kaVoz kao sistem materijalnih ta£aka
2 Kretanje voza u kriviniUravnoteºuju¢a brzina
3 Interakcija ²inskih vozila i kolosekaNajjednostavniji model: pokretne sileModeli polovine vagonaSloºeniji ra£unski modeli
4 Vinklerova podlogaRazli£iti modeli kolosekaDiferencijalna jedna£ina ²tapa na Vinklerovoj podloziVozovi velikih brzina: kriti£na brzina
5 Naponski talasi u tluVrste naponskih talasaBrzine prostiranja talasaPropagacija naponskih talasa kroz tlo
S.�ori¢ Mehanika voºnje

Poduºna dinamika ²inskih vozilaKretanje voza u krivini
Interakcija ²inskih vozila i kolosekaVinklerova podloga
Naponski talasi u tlu
Voz kao jedna materijalna ta£kaVoz kao sistem materijalnih ta£aka
Sadrºaj
1 Poduºna dinamika ²inskih vozilaVoz kao jedna materijalna ta£kaVoz kao sistem materijalnih ta£aka
2 Kretanje voza u kriviniUravnoteºuju¢a brzina
3 Interakcija ²inskih vozila i kolosekaNajjednostavniji model: pokretne sileModeli polovine vagonaSloºeniji ra£unski modeli
4 Vinklerova podlogaRazli£iti modeli kolosekaDiferencijalna jedna£ina ²tapa na Vinklerovoj podloziVozovi velikih brzina: kriti£na brzina
5 Naponski talasi u tluVrste naponskih talasaBrzine prostiranja talasaPropagacija naponskih talasa kroz tlo
S.�ori¢ Mehanika voºnje

Poduºna dinamika ²inskih vozilaKretanje voza u krivini
Interakcija ²inskih vozila i kolosekaVinklerova podloga
Naponski talasi u tlu
Voz kao jedna materijalna ta£kaVoz kao sistem materijalnih ta£aka
Voz posmatran kao materijalna ta£ka
S.�ori¢ Mehanika voºnje

Poduºna dinamika ²inskih vozilaKretanje voza u krivini
Interakcija ²inskih vozila i kolosekaVinklerova podloga
Naponski talasi u tlu
Voz kao jedna materijalna ta£kaVoz kao sistem materijalnih ta£aka
Poduºna dinamika ²inskih vozila
Voz posmatran kao materijalna ta£ka: pretpostavke
Zanemaruju se veze izme�u lokomotive i vagona
Voz se posmatra kao jedna materijalna ta£ka
Materijalna ta£ka je koncentrisana u sredi²tu mase voza
Masa mat. ta£ke je jednaka ukupnoj masi vozaPrilikom pravolinijskog kretanja voza na voz deluju sile:
- Vu£na sila Ze
- Sila otpora kretanju W- Sila ko£enja Bk
Gravitacione sile deluju (samo) prilikom kretanja voza ponagibu
S.�ori¢ Mehanika voºnje

Poduºna dinamika ²inskih vozilaKretanje voza u krivini
Interakcija ²inskih vozila i kolosekaVinklerova podloga
Naponski talasi u tlu
Voz kao jedna materijalna ta£kaVoz kao sistem materijalnih ta£aka
Poduºna dinamika ²inskih vozila
Osnovni otpori kretanju voza
Otpori trenja u osovinama i vezama
Otpori kotrljanja to£kova po ²inama
Otpori usled trenja klizanja to£kova po ²inama
Aerodinami£ki otpori
Otpori usled elasti£nosti (ugiba) koloseka
S.�ori¢ Mehanika voºnje

Poduºna dinamika ²inskih vozilaKretanje voza u krivini
Interakcija ²inskih vozila i kolosekaVinklerova podloga
Naponski talasi u tlu
Voz kao jedna materijalna ta£kaVoz kao sistem materijalnih ta£aka
Relativno u£e²¢e u otporima kretanju
S.�ori¢ Mehanika voºnje

Poduºna dinamika ²inskih vozilaKretanje voza u krivini
Interakcija ²inskih vozila i kolosekaVinklerova podloga
Naponski talasi u tlu
Voz kao jedna materijalna ta£kaVoz kao sistem materijalnih ta£aka
Voz posmatran kao materijalna ta£ka
Diferencijalna jedna£ina kretanja
Diferencijalna jedna£ina kretanja:
m~a = ~FR odn. m~r = ~Ze + ~W
Prikazano u skalarnom obliku (x je pravac kretanja):
mx = Ze −W
Po£etni uslovi kretanja (obi£no su homogeni):
t = 0 : x(0) = x0 x(0) = v0
S.�ori¢ Mehanika voºnje

Poduºna dinamika ²inskih vozilaKretanje voza u krivini
Interakcija ²inskih vozila i kolosekaVinklerova podloga
Naponski talasi u tlu
Voz kao jedna materijalna ta£kaVoz kao sistem materijalnih ta£aka
Sadrºaj
1 Poduºna dinamika ²inskih vozilaVoz kao jedna materijalna ta£kaVoz kao sistem materijalnih ta£aka
2 Kretanje voza u kriviniUravnoteºuju¢a brzina
3 Interakcija ²inskih vozila i kolosekaNajjednostavniji model: pokretne sileModeli polovine vagonaSloºeniji ra£unski modeli
4 Vinklerova podlogaRazli£iti modeli kolosekaDiferencijalna jedna£ina ²tapa na Vinklerovoj podloziVozovi velikih brzina: kriti£na brzina
5 Naponski talasi u tluVrste naponskih talasaBrzine prostiranja talasaPropagacija naponskih talasa kroz tlo
S.�ori¢ Mehanika voºnje

Poduºna dinamika ²inskih vozilaKretanje voza u krivini
Interakcija ²inskih vozila i kolosekaVinklerova podloga
Naponski talasi u tlu
Voz kao jedna materijalna ta£kaVoz kao sistem materijalnih ta£aka
Poduºna dinamika ²inskih vozila
Voz kao sistem materijalnih ta£aka
Voz se posmatra kao skup materijalnih ta£aka
Svaki vagon i jedna ili vi²e lokomotiva se posmatraju kao pojedna materijalna ta£ka
Posmatra se samo translatorno kretanje vagona i lokomotive(zato su mat. ta£ke dovoljne)
Vagoni i lokomotiva, odn. mat. ta£ke su me�usobno povezani
Veze izme�u vagona i lokomotive su opruge i viskozniprigu²iva£i
Opruge i viskozni prigu²iva£i mogu da budu linearni ilinelinearni
S.�ori¢ Mehanika voºnje

Poduºna dinamika ²inskih vozilaKretanje voza u krivini
Interakcija ²inskih vozila i kolosekaVinklerova podloga
Naponski talasi u tlu
Voz kao jedna materijalna ta£kaVoz kao sistem materijalnih ta£aka
Model voza sa lokomotivom i dva vagona
S.�ori¢ Mehanika voºnje

Poduºna dinamika ²inskih vozilaKretanje voza u krivini
Interakcija ²inskih vozila i kolosekaVinklerova podloga
Naponski talasi u tlu
Voz kao jedna materijalna ta£kaVoz kao sistem materijalnih ta£aka
Poduºna dinamika ²inskih vozila
Model voza sa lokomotivom i dva vagona
Model voza sa tri mase (sa lokomotivom i dva vagona) jereprezent proizvoljne kompozicijeU kompoziciji voza postoji
- vozilo na £elu kompozicije (masa m1)- vozilo unutar kompozicije (masa m2)- vozilo na kraju kompozicije (masa m3)
Lokomotiva moºe da bude na bilo kojoj poziciji (u ra£unskommodelu)
U realnosti je lokomotiva na po£etku i/ili na kraju kompozicije
S.�ori¢ Mehanika voºnje

Poduºna dinamika ²inskih vozilaKretanje voza u krivini
Interakcija ²inskih vozila i kolosekaVinklerova podloga
Naponski talasi u tlu
Voz kao jedna materijalna ta£kaVoz kao sistem materijalnih ta£aka
Poduºna dinamika ²inskih vozila
Model voza sa lokomotivom i dva vagona
Sile koje deluju na vagone i lokomotivu:Sila otpora kretanju Fri
- sila otpora kotrljanju ("rolling resistance")- sila aerodinami£kog otpora ("aerodynamic resistance")
U sile otpora kretanju spada i sila (pneumatskog) ko£enjavagona (ne i lokomotive!)
Komponenta sile gravitacije Fgi (ako je trasa u nagibu:usponu ili padu)
Vu£na sila ili sila (dinami£kog) ko£enja lokomotive Ft/db
S.�ori¢ Mehanika voºnje

Poduºna dinamika ²inskih vozilaKretanje voza u krivini
Interakcija ²inskih vozila i kolosekaVinklerova podloga
Naponski talasi u tlu
Voz kao jedna materijalna ta£kaVoz kao sistem materijalnih ta£aka
Komponente sile gravitacije: kretanje u nagibu
S.�ori¢ Mehanika voºnje

Poduºna dinamika ²inskih vozilaKretanje voza u krivini
Interakcija ²inskih vozila i kolosekaVinklerova podloga
Naponski talasi u tlu
Voz kao jedna materijalna ta£kaVoz kao sistem materijalnih ta£aka
Sistem sa dve materijalne ta£ke
12/06/2005Prof dr Stanko Brcic 2
Systems with Two DOF –Undamped vibration
k1m1 F1(t)
x1
m2F2(t)
k2 k3x2
S.�ori¢ Mehanika voºnje

Poduºna dinamika ²inskih vozilaKretanje voza u krivini
Interakcija ²inskih vozila i kolosekaVinklerova podloga
Naponski talasi u tlu
Voz kao jedna materijalna ta£kaVoz kao sistem materijalnih ta£aka
Sistem sa dve materijalne ta£ke
12/06/2005Prof dr Stanko Brcic 3
Systems with Two DOF
m
a1 = x1”
F1(t)F1em
a2 = x2”
F2(t)
x1 x2
F2e F2e F3e
• F1e = k1 x1• F2e = k2 (x2-x1)• F3e = k3 x2
mi ai = Fri(i = 1,2)
S.�ori¢ Mehanika voºnje

Poduºna dinamika ²inskih vozilaKretanje voza u krivini
Interakcija ²inskih vozila i kolosekaVinklerova podloga
Naponski talasi u tlu
Voz kao jedna materijalna ta£kaVoz kao sistem materijalnih ta£aka
Sistem sa dve materijalne ta£ke
12/06/2005Prof dr Stanko Brcic 4
Systems with Two DOF
• Differential equations of motion:
• or, 23122222
11122111)(
)(xkxxkFxm
xkxxkFxm−−−=−−+=
22231222
12212111)(
)(Fxkkxkxm
Fxkxkkxm=++−=−++
S.�ori¢ Mehanika voºnje

Poduºna dinamika ²inskih vozilaKretanje voza u krivini
Interakcija ²inskih vozila i kolosekaVinklerova podloga
Naponski talasi u tlu
Voz kao jedna materijalna ta£kaVoz kao sistem materijalnih ta£aka
Sistem sa dve materijalne ta£ke
12/06/2005Prof dr Stanko Brcic 5
Systems with Two DOF
• Matrix form of differential equations:
• where
[ ]{ } [ ]{ } { })(tFxKxM =+
[ ] [ ]
{ } { }⎭⎬⎫
⎩⎨⎧
=⎭⎬⎫
⎩⎨⎧
=
⎥⎦
⎤⎢⎣
⎡+−
−+=⎥
⎦
⎤⎢⎣
⎡=
)()(
)()()(
)(
00
2
1
2
1
322
221
2
1
tFtF
tFtxtx
tx
kkkkkk
Km
mM
S.�ori¢ Mehanika voºnje

Poduºna dinamika ²inskih vozilaKretanje voza u krivini
Interakcija ²inskih vozila i kolosekaVinklerova podloga
Naponski talasi u tlu
Voz kao jedna materijalna ta£kaVoz kao sistem materijalnih ta£aka
Sistem sa dve materijalne ta£ke
12/06/2005Prof dr Stanko Brcic 6
Systems with Two DOF
• Matrices [M] and [K] are constant, symmetric and positive definite matrices:
[ ] [ ] [ ] [ ]
22132222111
2112222111
12
0
)2,1,(
kkkkkkkkkmmmmmm
jikKmM ijij
−==+=+=====
===
S.�ori¢ Mehanika voºnje

Poduºna dinamika ²inskih vozilaKretanje voza u krivini
Interakcija ²inskih vozila i kolosekaVinklerova podloga
Naponski talasi u tlu
Voz kao jedna materijalna ta£kaVoz kao sistem materijalnih ta£aka
Model voza sa lokomotivom i dva vagona
S.�ori¢ Mehanika voºnje

Poduºna dinamika ²inskih vozilaKretanje voza u krivini
Interakcija ²inskih vozila i kolosekaVinklerova podloga
Naponski talasi u tlu
Voz kao jedna materijalna ta£kaVoz kao sistem materijalnih ta£aka
Poduºna dinamika ²inskih vozila
Model voza sa lokomotivom i dva vagona
Sile koje deluju na vagone i lokomotivu:Sila otpora kretanju Fr,i
- sila otpora kotrljanju ("rolling resistance")- sila aerodinami£kog otpora ("aerodynamic resistance")
U sile otpora kretanju spada i sila (pneumatskog) ko£enjavagona (ne i lokomotive!)
Komponenta sile gravitacije Fg,i (ako je trasa u nagibu:usponu ili padu)
Vu£na sila ili sila (dinami£kog) ko£enja lokomotive Ft/db
S.�ori¢ Mehanika voºnje

Poduºna dinamika ²inskih vozilaKretanje voza u krivini
Interakcija ²inskih vozila i kolosekaVinklerova podloga
Naponski talasi u tlu
Voz kao jedna materijalna ta£kaVoz kao sistem materijalnih ta£aka
Poduºna dinamika ²inskih vozila
Model voza sa lokomotivom i dva vagona
Generalisane koordinate: translacija vozila x1(t), x2(t) i x3(t)
Diferencijalne jedna£ine kretanja - razdvajanje vozila
Prvo vozilo (lokomotiva)
m1a1 + c1(v1 − v2) + k1(x1 − x2) = Ft/db − Fr1 ± Fg1
Srednje vozilo (vagon)
m2a2 + c1(v2 − v1) + c2(v2 − v3)+ k1(x2 − x1) + k2(x2 − x3) = −Fr2 ± Fg2
Poslednje vozilo (vagon)
m3a3 + c2(v3 − v2) + k2(x3 − x2) = −Fr3 ± Fg3S.�ori¢ Mehanika voºnje

Poduºna dinamika ²inskih vozilaKretanje voza u krivini
Interakcija ²inskih vozila i kolosekaVinklerova podloga
Naponski talasi u tlu
Voz kao jedna materijalna ta£kaVoz kao sistem materijalnih ta£aka
Poduºna dinamika ²inskih vozila
Model voza sa lokomotivom i dva vagona
Brzine i ubrzanja vozila su ai = xi vi = xi
Matri£ni oblik diferencijalnih jedna£ina kretanja
[M ]{x}+ [C]{x}+ [K]{x} = {F }t/db − {F }r ± {F }g
gde su, redom,
Matrica mase i vektor ubrzanja:
[M ] =
m1
m2
m3
{x} = {a} =
x1x2x3
S.�ori¢ Mehanika voºnje

Poduºna dinamika ²inskih vozilaKretanje voza u krivini
Interakcija ²inskih vozila i kolosekaVinklerova podloga
Naponski talasi u tlu
Voz kao jedna materijalna ta£kaVoz kao sistem materijalnih ta£aka
Poduºna dinamika ²inskih vozila
Model voza sa lokomotivom i dva vagona
Matrica prigu²enja i vektor brzine:
[C] =
c1 −c1 0−c1 (c1 + c2) −c20 −c2 c3
{x} = {v} =
x1x2x3
Matrica krutosti i vektor pomeranja:
[K] =
k1 −k1 0−k1 (k1 + k2) −k20 −k2 k3
{x} =
x1x2x3
S.�ori¢ Mehanika voºnje

Poduºna dinamika ²inskih vozilaKretanje voza u krivini
Interakcija ²inskih vozila i kolosekaVinklerova podloga
Naponski talasi u tlu
Voz kao jedna materijalna ta£kaVoz kao sistem materijalnih ta£aka
Poduºna dinamika ²inskih vozila
Model voza sa lokomotivom i dva vagona
Vektori optere¢enja: vu£na sila ili sila ko£enja, kao i sila otporakretanju (otpor kotrljanja i aerodinami£ki otpor)
{F }t/db =
Ft/db,1
00
{F }r =
Fr,1Fr,2Fr,3
Komponenta gravitacione sile (±mg sinα): ako se voz kre¢epo usponu, znak "-" ili po padu, znak "+"
{F }g =
Fg,1Fg,2Fg,3
S.�ori¢ Mehanika voºnje

Poduºna dinamika ²inskih vozilaKretanje voza u krivini
Interakcija ²inskih vozila i kolosekaVinklerova podloga
Naponski talasi u tlu
Voz kao jedna materijalna ta£kaVoz kao sistem materijalnih ta£aka
Poduºna dinamika ²inskih vozila
Model sa proizvoljnim brojem lokomotiva i vagona
Posmatra se kompozicija sa proizvoljnim brojem lokomotiva ivagona
Lokomotiva moºe da se na�e na bilo kojoj poziciji ukompoziciji (napred, nazad ili u sredini, iako je to nerealno)
Generalisane koordinate: translacija svakog vozilaxi(t), (i = 1, 2, . . . , n)
Diferencijalne jedna£ine kretanja se izvode razdvajanjem vozila(posmatraju se kao slobodne mat. ta£ke)
Sile veze izme�u vozila su sile u oprugama i prigu²iva£ima(linearno proporcionalne sa pomeranjima i brzinama vozila)
S.�ori¢ Mehanika voºnje

Poduºna dinamika ²inskih vozilaKretanje voza u krivini
Interakcija ²inskih vozila i kolosekaVinklerova podloga
Naponski talasi u tlu
Voz kao jedna materijalna ta£kaVoz kao sistem materijalnih ta£aka
Poduºna dinamika ²inskih vozila
Model sa proizvoljnim brojem lokomotiva i vagona
Prvo vozilo (i=1)
m1a1 + c1(v1 − v2) + k1(x1 − x2) = Ft/db,1 − Fr,1 ± Fg,1
Srednja vozila (broj i: i=2,3,. . . , n-1)
miai + ci−1(vi − vi−1) + ci(vi − vi+1)
+ ki−1(xi − xi−1) + ki(xi − xi+1) = Ft/db,i − Fr,i ± Fg,i
Poslednje vozilo (i=n)
mnan+cn−1(vn−vn−1)+kn−1(xn−xn−1) = Ft/db,n−Fr,n±Fg,n
S.�ori¢ Mehanika voºnje

Poduºna dinamika ²inskih vozilaKretanje voza u krivini
Interakcija ²inskih vozila i kolosekaVinklerova podloga
Naponski talasi u tlu
Voz kao jedna materijalna ta£kaVoz kao sistem materijalnih ta£aka
Poduºna dinamika ²inskih vozila
Model sa proizvoljnim brojem lokomotiva i vagona
Matri£ni oblik diferencijalnih jedna£ina kretanja
[M ]{x}+ [C]{x}+ [K]{x} = {F (t)}t/db − {F }r ± {F }g(1)
Matrica mase i vektor ubrzanja (analogno i vektori brzine ipomeranja):
[M ] =
m1
. . .mi
. . .mn
{x} =
x1...xi...xn
S.�ori¢ Mehanika voºnje

Poduºna dinamika ²inskih vozilaKretanje voza u krivini
Interakcija ²inskih vozila i kolosekaVinklerova podloga
Naponski talasi u tlu
Voz kao jedna materijalna ta£kaVoz kao sistem materijalnih ta£aka
Poduºna dinamika ²inskih vozila
Model sa proizvoljnim brojem lokomotiva i vagona
Matrica prigu²enja (tri-dijagonalna struktura) [C] =
c1 −c1−c1 (c1 + c2) −c2
. . .−ci−1 (ci + ci+1) −ci+1
−cn−2 (cn−1 + cn) −cn−cn−1 cn
S.�ori¢ Mehanika voºnje

Poduºna dinamika ²inskih vozilaKretanje voza u krivini
Interakcija ²inskih vozila i kolosekaVinklerova podloga
Naponski talasi u tlu
Voz kao jedna materijalna ta£kaVoz kao sistem materijalnih ta£aka
Poduºna dinamika ²inskih vozila
Model sa proizvoljnim brojem lokomotiva i vagona
Matrica krutosti (tri-dijagonalna struktura) [K] =
k1 −k1−k1 (k1 + k2) −k2
. . .−ki−1 (ki + ki+1) −ki+1
−kn−2 (kn−1 + kn) −kn−kn−1 kn
S.�ori¢ Mehanika voºnje

Poduºna dinamika ²inskih vozilaKretanje voza u krivini
Interakcija ²inskih vozila i kolosekaVinklerova podloga
Naponski talasi u tlu
Voz kao jedna materijalna ta£kaVoz kao sistem materijalnih ta£aka
Poduºna dinamika ²inskih vozila
Model sa proizvoljnim brojem lokomotiva i vagona
Vektori optere¢enja: vu£na sila ili sila ko£enja, kao i sila otporakretanju (otpor kotrljanja i aerodinami£ki otpor)
{F }t/db =
Ft/db,1...
Ft/db,i...
Ft/db,n
{F }r =
Fr,1...Fr,i...
Fr,3
U vektoru {F (t)}t/db su elementi 6= 0 samo na mestima gde senalazi lokomotiva u kompoziciji
S.�ori¢ Mehanika voºnje

Poduºna dinamika ²inskih vozilaKretanje voza u krivini
Interakcija ²inskih vozila i kolosekaVinklerova podloga
Naponski talasi u tlu
Voz kao jedna materijalna ta£kaVoz kao sistem materijalnih ta£aka
Poduºna dinamika ²inskih vozila
Model sa proizvoljnim brojem lokomotiva i vagona
Optere¢enje usled gravitacione sile (komponenta ±mg sinα)postoji samo ako se voz kre¢e po usponu, znak "-" ili po padu,znak "+"
{F }g =
Fg,1...Fg,i...
Fg,n
S.�ori¢ Mehanika voºnje

Poduºna dinamika ²inskih vozilaKretanje voza u krivini
Interakcija ²inskih vozila i kolosekaVinklerova podloga
Naponski talasi u tlu
Voz kao jedna materijalna ta£kaVoz kao sistem materijalnih ta£aka
Poduºna dinamika ²inskih vozila
Model sa proizvoljnim brojem lokomotiva i vagona
Diferencijalne jedna£ine kretanja (1) su sistem obi£nih linearnihdiferencijalnih jedna£ina sa konstantnim koe�cijentima
Matrica mase je dijagonalna matrica
Matrica prigu²enja i matrica krutosti su simetri£ne ipozitivno-de�nitne matrice tro-dijagonalne strukture
Problem je u odre�ivanju odgovaraju¢ih numeri£kih podatakaza konstante ci i kiProblem je i u odgovaraju¢em de�nisanju vektora optere¢enja(kako vu£ne sile, ili sile ko£enja, tako i u sili otpora kretanju)
S.�ori¢ Mehanika voºnje

Poduºna dinamika ²inskih vozilaKretanje voza u krivini
Interakcija ²inskih vozila i kolosekaVinklerova podloga
Naponski talasi u tlu
Voz kao jedna materijalna ta£kaVoz kao sistem materijalnih ta£aka
Poduºna dinamika ²inskih vozila
Nelinearni model sa proizvoljnim brojem lokomotiva i vagona
Imaju¢i u vidu stvarne veze izme�u vagona, odn. izme�uvagona i lokomotive, linearne sile veze oblika F = kx, kao iF = cv nisu dovoljno dobra aproksimacija
Formuli²u se nelinearne relacije za sile veze izme�u vozila
U nelinearnom modeliranju kretanja voza, sile veze izme�uvozila (vagona i lokomotive) prikazuju se nelinearnimfunkcijama zavisnim od brzina i ubrzanja vozila F = F (v, x)
Dobija se sistem nelinearnih diferencijalnih jedna£ina kretanja
S.�ori¢ Mehanika voºnje

Poduºna dinamika ²inskih vozilaKretanje voza u krivini
Interakcija ²inskih vozila i kolosekaVinklerova podloga
Naponski talasi u tlu
Voz kao jedna materijalna ta£kaVoz kao sistem materijalnih ta£aka
Poduºna dinamika ²inskih vozila
Nelinearni model sa proizvoljnim brojem lokomotiva i vagona
Sile veze izme�u pojedinih vozila kompozicije:- za prvo vozilo (i = 1)
Fwc,1 = Fwc,1(v1, v2, x1, x2)
- za vozilo unutar kopozicije (i=2,3,. . . ,n-1)
Fwc,i = Fwc,i(vi−1, vi, vi+1, xi−1, xi, xi+1)
- za poslednje vozilo (i = n)
Fwc,n = Fwc,n(vn−1, vn, xn−1, xn)
Linijska struktura kompozicije voza generi²e trakastu(trodijagonalnu) strukturu u silama veze
S.�ori¢ Mehanika voºnje

Poduºna dinamika ²inskih vozilaKretanje voza u krivini
Interakcija ²inskih vozila i kolosekaVinklerova podloga
Naponski talasi u tlu
Voz kao jedna materijalna ta£kaVoz kao sistem materijalnih ta£aka
Poduºna dinamika ²inskih vozila
Nelinearni model sa proizvoljnim brojem lokomotiva i vagona
Prvo vozilo (i=1)
m1 a1 + Fwc,1 = Ft/db,1 − Fr,1 ± Fg,1
Srednja vozila (broj i: i=2,3,. . . , n-1)
mi ai + Fwc,i = Fr/tb,i − Fr,i ± Fg,i
Poslednje vozilo (i=n)
mnan + Fwc,n = Ft/db,n − Fr,n ± Fg,n
S.�ori¢ Mehanika voºnje

Poduºna dinamika ²inskih vozilaKretanje voza u krivini
Interakcija ²inskih vozila i kolosekaVinklerova podloga
Naponski talasi u tlu
Voz kao jedna materijalna ta£kaVoz kao sistem materijalnih ta£aka
Poduºna dinamika ²inskih vozila
Nelinearni model sa proizvoljnim brojem lokomotiva i vagona
Jedna£ine kretanja se napi²u za sve slobodne ta£ke i prikaºu seu matri£nom obliku
Matri£ni oblik nelinearnih diferencijalnih jedna£ina kretanja
[M ]{x}+ {F }wx(x,x) = {F (t)}t/db − {F }r ± {F }g
U linearnom pristupu vektor nelinearnih sila veze izme�uvagona {F }wx(x,x) se dobija u vidu linearnog zbira
{F }wx(x,x) = [C]{x}+ [K]{x}
S.�ori¢ Mehanika voºnje

Poduºna dinamika ²inskih vozilaKretanje voza u krivini
Interakcija ²inskih vozila i kolosekaVinklerova podloga
Naponski talasi u tlu
Voz kao jedna materijalna ta£kaVoz kao sistem materijalnih ta£aka
Veze izme�u vozila (vagona i lokomotive)
S.�ori¢ Mehanika voºnje

Poduºna dinamika ²inskih vozilaKretanje voza u krivini
Interakcija ²inskih vozila i kolosekaVinklerova podloga
Naponski talasi u tlu
Voz kao jedna materijalna ta£kaVoz kao sistem materijalnih ta£aka
Veze izme�u vozila (vagona i lokomotive)
S.�ori¢ Mehanika voºnje
Poduºna dinamika ²inskih vozilaKretanje voza u krivini
Interakcija ²inskih vozila i kolosekaVinklerova podloga
Naponski talasi u tlu
Voz kao jedna materijalna ta£kaVoz kao sistem materijalnih ta£aka
Poduºna dinamika ²inskih vozila
Sila otpora kretanju FrSila otpora kretanju Fr,i ("propulsion resistance")
- sila otpora kotrljanju ("rolling resistance")- sila aerodinami£kog otpora ("aerodynamic resistance")
Sila otpora kretanju se obi£no prikazuje u obliku zavisnosti odbrzine kretanja v:
Fr = A+B v + C v2
gde su A,B, C empirijski coe�cijenti
S.�ori¢ Mehanika voºnje

Poduºna dinamika ²inskih vozilaKretanje voza u krivini
Interakcija ²inskih vozila i kolosekaVinklerova podloga
Naponski talasi u tlu
Voz kao jedna materijalna ta£kaVoz kao sistem materijalnih ta£aka
Sila otpora kretanju Fr
S.�ori¢ Mehanika voºnje

Poduºna dinamika ²inskih vozilaKretanje voza u krivini
Interakcija ²inskih vozila i kolosekaVinklerova podloga
Naponski talasi u tlu
Voz kao jedna materijalna ta£kaVoz kao sistem materijalnih ta£aka
Poduºna dinamika ²inskih vozila
Vu£na sila i sila ko£enja lokomotive Ft/db
Vu£na sila i sila ko£enja lokomotive Ft/db ("traction anddynamic braking") se prikazuju kao ista sila u ra£unskommodelu, ali se razlikuju po smeru
Vu£na sila i sila ko£enja lokomotive se komplikovano de�n²u ura£unskim modelima
Dizel elektri£ne lokomotive imaju obi£no 8 nivoa pode²avanjavu£ne sile ("osam brzina", "throttle notch levels")
Pri manjim brzinama vu£na sila je proporcionalna sa nivoom(stepenom) N i skoro je nezavisna od brzine
Pri ve¢im brzinama vu£na sila opada sa porastom brzine
S.�ori¢ Mehanika voºnje

Poduºna dinamika ²inskih vozilaKretanje voza u krivini
Interakcija ²inskih vozila i kolosekaVinklerova podloga
Naponski talasi u tlu
Voz kao jedna materijalna ta£kaVoz kao sistem materijalnih ta£aka
Vu£na sila kod dizel elektri£ne lokomotive
S.�ori¢ Mehanika voºnje

Poduºna dinamika ²inskih vozilaKretanje voza u krivini
Interakcija ²inskih vozila i kolosekaVinklerova podloga
Naponski talasi u tlu
Voz kao jedna materijalna ta£kaVoz kao sistem materijalnih ta£aka
Sila ko£enja kod dizel elektri£ne lokomotive
S.�ori¢ Mehanika voºnje

Poduºna dinamika ²inskih vozilaKretanje voza u krivini
Interakcija ²inskih vozila i kolosekaVinklerova podloga
Naponski talasi u tlu
Voz kao jedna materijalna ta£kaVoz kao sistem materijalnih ta£aka
Sila ko£enja kod dizel elektri£ne lokomotive
S.�ori¢ Mehanika voºnje

Poduºna dinamika ²inskih vozilaKretanje voza u krivini
Interakcija ²inskih vozila i kolosekaVinklerova podloga
Naponski talasi u tlu
Voz kao jedna materijalna ta£kaVoz kao sistem materijalnih ta£aka
Sila ko£enja kod elektri£ne lokomotive
S.�ori¢ Mehanika voºnje

Poduºna dinamika ²inskih vozilaKretanje voza u krivini
Interakcija ²inskih vozila i kolosekaVinklerova podloga
Naponski talasi u tlu
Voz kao jedna materijalna ta£kaVoz kao sistem materijalnih ta£aka
Sudar vagona i mogu¢e "penjanje" vagona
S.�ori¢ Mehanika voºnje

Poduºna dinamika ²inskih vozilaKretanje voza u krivini
Interakcija ²inskih vozila i kolosekaVinklerova podloga
Naponski talasi u tlu
Voz kao jedna materijalna ta£kaVoz kao sistem materijalnih ta£aka
Poduºna dinamika ²inskih vozila
Udobnost voºnje u poduºnom pravcu
Udobnost voºnje se obi£no izraºava preko ubrzanja uvertikalnom i bo£nom pravcu
Zbog male athezije to£ka i ²ine, u poduºnom pravcu sumogu¢a relativno mala ubrzanja
Sama lokomotiva moºe da ostvari ubrzanje od oko ≈ 0.3 g(odn. red veli£ine 0.1÷ 1.0m/s2), uz pogon na sve to£kove
U slu£aju ko£enja, usporenja su ne²to manja - reda veli£ine0.1÷ 0.6m/s2
Prihvatljive amplitude poduºnog oscilovanja oko 75 mm
S.�ori¢ Mehanika voºnje

Poduºna dinamika ²inskih vozilaKretanje voza u krivini
Interakcija ²inskih vozila i kolosekaVinklerova podloga
Naponski talasi u tlu
Voz kao jedna materijalna ta£kaVoz kao sistem materijalnih ta£aka
Udobnost voºnje - granice ubrzanja
S.�ori¢ Mehanika voºnje

Poduºna dinamika ²inskih vozilaKretanje voza u krivini
Interakcija ²inskih vozila i kolosekaVinklerova podloga
Naponski talasi u tlu
Voz kao jedna materijalna ta£kaVoz kao sistem materijalnih ta£aka
Udobnost voºnje - granice amplituda oscilovanja
S.�ori¢ Mehanika voºnje

Poduºna dinamika ²inskih vozilaKretanje voza u krivini
Interakcija ²inskih vozila i kolosekaVinklerova podloga
Naponski talasi u tlu
Uravnoteºuju¢a brzina
Sadrºaj
1 Poduºna dinamika ²inskih vozilaVoz kao jedna materijalna ta£kaVoz kao sistem materijalnih ta£aka
2 Kretanje voza u kriviniUravnoteºuju¢a brzina
3 Interakcija ²inskih vozila i kolosekaNajjednostavniji model: pokretne sileModeli polovine vagonaSloºeniji ra£unski modeli
4 Vinklerova podlogaRazli£iti modeli kolosekaDiferencijalna jedna£ina ²tapa na Vinklerovoj podloziVozovi velikih brzina: kriti£na brzina
5 Naponski talasi u tluVrste naponskih talasaBrzine prostiranja talasaPropagacija naponskih talasa kroz tlo
S.�ori¢ Mehanika voºnje

Poduºna dinamika ²inskih vozilaKretanje voza u krivini
Interakcija ²inskih vozila i kolosekaVinklerova podloga
Naponski talasi u tlu
Uravnoteºuju¢a brzina
Kretanje voza u krivini
Ravnoteºa sila u krivini
Ako se voz kre¢e po krivini sa konstantnim radijusom R i sakonstantnom brzinom v, normalno ubrzanje centra masevagona je
an =v2
R
Normalno ubrzanje je usmereno ka centru krivine
U skladu sa D'Alambert-ovim principom, normalnom ubrzanjuodgovara centrifugalna sila
Fin =mv2
R
S.�ori¢ Mehanika voºnje

Poduºna dinamika ²inskih vozilaKretanje voza u krivini
Interakcija ²inskih vozila i kolosekaVinklerova podloga
Naponski talasi u tlu
Uravnoteºuju¢a brzina
Kretanje voza u krivini
Ravnoteºa sila u krivini
Centrifugalna sila teºi da prevrne vozilo na spolja²nju stranu(od centra krivine)
Kolosek mora da se izvede u krivini sa nadvi²enjem spolja²nje²ine h
Ugao popre£nog nagiba koloseka je φkolAko je razmak ²ina G, onda je sinφkol =
hG
Mogu¢a je ravnoteºa izme�u komponente gravitacione sileteºine i komponente centrifugalne (inercijalne) sile
Brzina kretanja vozila pri takvoj ravnoteºi je uravnoteºuju¢abrzina
S.�ori¢ Mehanika voºnje

Poduºna dinamika ²inskih vozilaKretanje voza u krivini
Interakcija ²inskih vozila i kolosekaVinklerova podloga
Naponski talasi u tlu
Uravnoteºuju¢a brzina
Ravnoteºa sila u krivini - nadvi²enje spolja²nje ²ine
S.�ori¢ Mehanika voºnje

Poduºna dinamika ²inskih vozilaKretanje voza u krivini
Interakcija ²inskih vozila i kolosekaVinklerova podloga
Naponski talasi u tlu
Uravnoteºuju¢a brzina
Kretanje voza u krivini
Ravnoteºa sila u krivini
Ravnoteºa komponente centrifugalne sile i komponentesopstvene teºine
mv2
Rcosφ = mg sinφ (2)
U principu, ugao φ je jednak zbiru ugla popre£nog nagibakoloseka φkol i ugla kotrljanja ("roll angle") vagona, kojipostoji zbog elasti£nih veza izme�u vagona i postolja
Ako se pretpostavi da je φ ≈ φkol, pri £emu je ugao popre£nognagiba relativno mali, onda je
cosφ ≈ 1 sinφ =h
G(3)
S.�ori¢ Mehanika voºnje
Poduºna dinamika ²inskih vozilaKretanje voza u krivini
Interakcija ²inskih vozila i kolosekaVinklerova podloga
Naponski talasi u tlu
Uravnoteºuju¢a brzina
Kretanje voza u krivini
Ravnoteºa sila u krivini
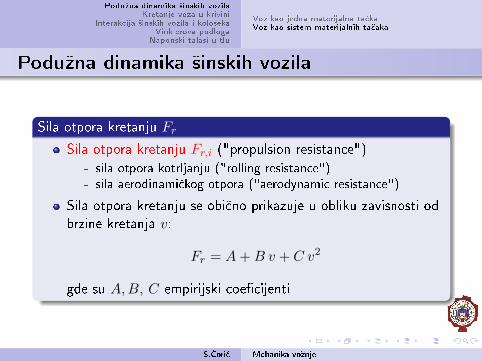
Sa h je ozna£eno nadvi²enje ²ine, a G je razmak izme�u ²ina
Unose¢i (3) u jedna£inu ravnoteºe (2) dobija seuravnoteºuju¢a brzina vozila:
v =
√g hR
G(4)
Ako se vozilo kre¢e sa manjom brziom od brzine (4), ondavozilo ima vi²ak nadvi²enja
Ako se voz kre¢e sa brzinom koja je ve¢a od brzine (4), ondapostoji nedostatak nadvi²enja
S.�ori¢ Mehanika voºnje

Poduºna dinamika ²inskih vozilaKretanje voza u krivini
Interakcija ²inskih vozila i kolosekaVinklerova podloga
Naponski talasi u tlu
Uravnoteºuju¢a brzina
Kretanje voza u krivini
Ravnoteºa sila u krivini
Nedostatak nadvi²enja spolja²nje ²ine izaziva ve¢e bo£ne silena spolja²njoj ²ini
Takve bo£ne sile mogu da izazovu neºeljeno kretanje to£ka pospolja²njoj ²ini
Mogu¢a posledica je penjanje to£ka na spolja²nju ²inu iispadanje vagona iz koloseka
Pri kretanju u krivini, javljaju se i poduºne sile na kontaktu sa²inama
Spolja²nji to£ak se kre¢e po ve¢em radijusu - prelazi duºi put
S.�ori¢ Mehanika voºnje

Poduºna dinamika ²inskih vozilaKretanje voza u krivini
Interakcija ²inskih vozila i kolosekaVinklerova podloga
Naponski talasi u tlu
Uravnoteºuju¢a brzina
Kretanje voza u krivini
Ravnoteºa sila u krivini
Osovina se obr¢e sa konstantnom ugaonom brzinom, pa zbograzlike u pre�enom putu jedan ili oba to£ka na osovini mora daprokliza
Klizanje to£kova se smanjuje ukoliko se promene radijusikotrljanja to£kova - zbog konusnog oblika to£kova upopre£nom preseku
Vagon se u krivini pomera ka spolja²njoj ²ini, £ime se pove¢avaradijus kotrljanja spolja²njeg to£ka
Time se pove¢ava i njegova brzina u poduºnom pravcu uodnosu na unutra²nji to£ak
Na taj na£in se smanjuje proklizavanje i habanje to£kova, odn.dobija se bolje pona²anje u krivini
S.�ori¢ Mehanika voºnje

Poduºna dinamika ²inskih vozilaKretanje voza u krivini
Interakcija ²inskih vozila i kolosekaVinklerova podloga
Naponski talasi u tlu
Najjednostavniji model: pokretne sileModeli polovine vagonaSloºeniji ra£unski modeli
Sadrºaj
1 Poduºna dinamika ²inskih vozilaVoz kao jedna materijalna ta£kaVoz kao sistem materijalnih ta£aka
2 Kretanje voza u kriviniUravnoteºuju¢a brzina
3 Interakcija ²inskih vozila i kolosekaNajjednostavniji model: pokretne sileModeli polovine vagonaSloºeniji ra£unski modeli
4 Vinklerova podlogaRazli£iti modeli kolosekaDiferencijalna jedna£ina ²tapa na Vinklerovoj podloziVozovi velikih brzina: kriti£na brzina
5 Naponski talasi u tluVrste naponskih talasaBrzine prostiranja talasaPropagacija naponskih talasa kroz tlo
S.�ori¢ Mehanika voºnje

Poduºna dinamika ²inskih vozilaKretanje voza u krivini
Interakcija ²inskih vozila i kolosekaVinklerova podloga
Naponski talasi u tlu
Najjednostavniji model: pokretne sileModeli polovine vagonaSloºeniji ra£unski modeli
Vertikalna dinamika ²inskih vozila
Kretanje ²inskih vozila u vertikalnoj ravni
Zanemaruju se bo£ne sile
Zanemaruje se oscilovanje vagona oko poduºne ose X
Zanemaruje se oscilovanje oko popre£ne ose Y
Vagoni se posmatraju kao kruta tela
Uticaj voza na kolosek: pokretne vertikalne sile
S.�ori¢ Mehanika voºnje

Poduºna dinamika ²inskih vozilaKretanje voza u krivini
Interakcija ²inskih vozila i kolosekaVinklerova podloga
Naponski talasi u tlu
Najjednostavniji model: pokretne sileModeli polovine vagonaSloºeniji ra£unski modeli
Kretanje voza - sistem pokretnih sila
Najjednostavnija interakcija ²inskih vozila i koloseka: sistempokretnih sila
S.�ori¢ Mehanika voºnje

Poduºna dinamika ²inskih vozilaKretanje voza u krivini
Interakcija ²inskih vozila i kolosekaVinklerova podloga
Naponski talasi u tlu
Najjednostavniji model: pokretne sileModeli polovine vagonaSloºeniji ra£unski modeli
Nominalne osovinske sile
S.�ori¢ Mehanika voºnje

Poduºna dinamika ²inskih vozilaKretanje voza u krivini
Interakcija ²inskih vozila i kolosekaVinklerova podloga
Naponski talasi u tlu
Najjednostavniji model: pokretne sileModeli polovine vagonaSloºeniji ra£unski modeli
Sadrºaj
1 Poduºna dinamika ²inskih vozilaVoz kao jedna materijalna ta£kaVoz kao sistem materijalnih ta£aka
2 Kretanje voza u kriviniUravnoteºuju¢a brzina
3 Interakcija ²inskih vozila i kolosekaNajjednostavniji model: pokretne sileModeli polovine vagonaSloºeniji ra£unski modeli
4 Vinklerova podlogaRazli£iti modeli kolosekaDiferencijalna jedna£ina ²tapa na Vinklerovoj podloziVozovi velikih brzina: kriti£na brzina
5 Naponski talasi u tluVrste naponskih talasaBrzine prostiranja talasaPropagacija naponskih talasa kroz tlo
S.�ori¢ Mehanika voºnje

Poduºna dinamika ²inskih vozilaKretanje voza u krivini
Interakcija ²inskih vozila i kolosekaVinklerova podloga
Naponski talasi u tlu
Najjednostavniji model: pokretne sileModeli polovine vagonaSloºeniji ra£unski modeli
Svaki vagon sa po dva stepena slobode
Realan model: sanduk vagona je kruto telo viskoelasti£no vezano zaobrtna postolja sa to£kovima
S.�ori¢ Mehanika voºnje
Poduºna dinamika ²inskih vozilaKretanje voza u krivini
Interakcija ²inskih vozila i kolosekaVinklerova podloga
Naponski talasi u tlu
Najjednostavniji model: pokretne sileModeli polovine vagonaSloºeniji ra£unski modeli
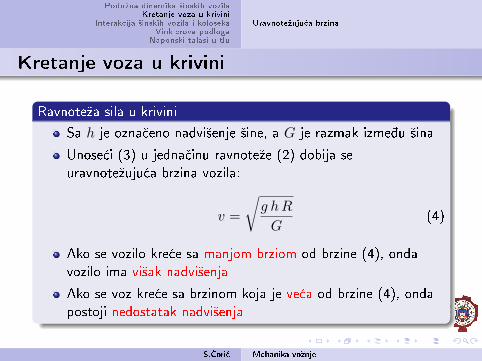
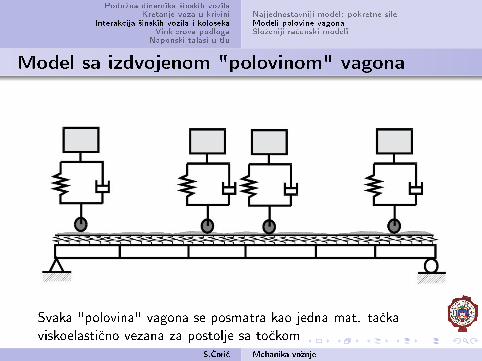
Model sa izdvojenom "polovinom" vagona
Svaka "polovina" vagona se posmatra kao jedna mat. ta£kaviskoelasti£no vezana za postolje sa to£kom
S.�ori¢ Mehanika voºnje

Poduºna dinamika ²inskih vozilaKretanje voza u krivini
Interakcija ²inskih vozila i kolosekaVinklerova podloga
Naponski talasi u tlu
Najjednostavniji model: pokretne sileModeli polovine vagonaSloºeniji ra£unski modeli
Model sa izdvojenom "polovinom" vagona
S.�ori¢ Mehanika voºnje

Poduºna dinamika ²inskih vozilaKretanje voza u krivini
Interakcija ²inskih vozila i kolosekaVinklerova podloga
Naponski talasi u tlu
Najjednostavniji model: pokretne sileModeli polovine vagonaSloºeniji ra£unski modeli
Prikaz unutra²njih sila veze
December 2, 2005 9:20 Vehicle–Bridge Interaction Dynamics bk04-001
Vehicle–Bridge Interaction Element Considering Pitching Effect 203
y
z
x
element i
element j
fc2fc3 fc1fc4 WW
xcixcj
ui
u j
rirj
xci
xcj
WW
2W
yv
θv
Fig. 7.3. Free body diagrams for components of the VBI system.
used to denote quantities associated with the front and rear wheels
(or wheel assemblies) of the vehicle under consideration. As can be
seen from Fig. 7.2, both elements i and j of the bridge, on which the
vehicle is acting will be affected by the pitching motion of the car
body via the two suspension units. The reverse is also true.
Figure 7.3 shows the free body diagrams for the components of the
VBI system that are of interest, in which 2W denotes the weight of
the car body (i.e., W = 0.5 Mvg, with Mv indicating the total mass
of the car body, and g the acceleration of gravity), xc the contact
position of each set of wheels (or wheel assemblies) on the beam
element, and u the vertical displacement of the beam element. As
can be seen, the (rigid) car body is acted upon by the contact forces
fc1, fc2, fc3, fc4, and the front and rear wheels by the contact forces
S.�ori¢ Mehanika voºnje

Poduºna dinamika ²inskih vozilaKretanje voza u krivini
Interakcija ²inskih vozila i kolosekaVinklerova podloga
Naponski talasi u tlu
Najjednostavniji model: pokretne sileModeli polovine vagonaSloºeniji ra£unski modeli
Sadrºaj
1 Poduºna dinamika ²inskih vozilaVoz kao jedna materijalna ta£kaVoz kao sistem materijalnih ta£aka
2 Kretanje voza u kriviniUravnoteºuju¢a brzina
3 Interakcija ²inskih vozila i kolosekaNajjednostavniji model: pokretne sileModeli polovine vagonaSloºeniji ra£unski modeli
4 Vinklerova podlogaRazli£iti modeli kolosekaDiferencijalna jedna£ina ²tapa na Vinklerovoj podloziVozovi velikih brzina: kriti£na brzina
5 Naponski talasi u tluVrste naponskih talasaBrzine prostiranja talasaPropagacija naponskih talasa kroz tlo
S.�ori¢ Mehanika voºnje

Poduºna dinamika ²inskih vozilaKretanje voza u krivini
Interakcija ²inskih vozila i kolosekaVinklerova podloga
Naponski talasi u tlu
Najjednostavniji model: pokretne sileModeli polovine vagonaSloºeniji ra£unski modeli
Sloºeniji model vagona i koloseka
Modern Railway Track 6 DYNAMIC TRACK DESIGN
107
6 DYNAMIC TRACK DESIGN
6.1 Introduction
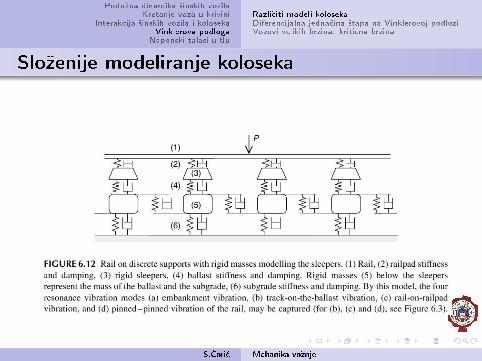
When dealing with track mechanics most of the problems are related in one way or another to dynam-ics. The dynamic interaction between vehicle and track can be described reasonably well in the verti-cal direction using mathematical models. Figure 6.1 gives an example of such a model made up of adiscrete mass-spring system for the vehicle, a discretely supported beam to describe the track, and aHertzian spring acting in the wheel/rail contact area.
Dynamic behaviour occurs in a fairly wideband ranging from very low frequencies ofthe order of 0.5-1 Hz for lateral and verticalcar body accelerations to 2000 Hz as a con-sequence of geometrical irregularities in railsand wheel treads. The suspension systembetween wheelset and bogie is the firstspring/damper combination to reduce vibra-tions originating from the wheel/rail interac-tion and is therefore called primarysuspension. The reduction of the vibrationsof lower frequency is dealt with in the secondstage between bogie and car body and iscalled secondary suspension. This terminol-ogy can be applied to the track part of the model in the same way. The railpad and railclip representthe primary suspension of the track and the ballast layer or comparable medium represent the sec-ondary suspension of the track.
Actual dynamic calculation is, however, extremely complex and is by no means generally accessible.Most analyses are limited to quasi-static considerations. Real dynamic problems are for the most partapproached in a very pragmatic way by carrying out measurements.
In this chapter attention is given to the basic ingredients of the dynamic behaviour of railway track.Section 6.2 deals with some fundamental aspects. The 1-mass spring system, presented in Section6.2.2, can be regarded as the most elementary system with the aid of which a number of practicalproblems can be considered. Extensions can be made in two directions: the construction can beenhanced to a multi degree of freedom system, and the load can be made more complex in terms ofimpact loads, and loads with a random character.
In Section 6.3 the track is modelled with relatively simple beam models consisting of the beam on anelastic foundation, a double beam, and a discretely supported track structure. The transfer functionbetween track load and track displacement is discussed. Also the effect of a moving load running onthe track is considered, as the track is considered to be infinitely stiff.
Track and rolling stock should in fact not be considered separately, but as one consistent system. Forthis reason the interaction between vehicle and track is introduced here without going into all thedetails required for a full treatment of this complex matter. After the introduction of the Hertzian spring,the physics of which were discussed earlier in Chapter 2, the transfer function between wheel and railis derived in Section 6.4. This relationship plays an important role when interpreting track recordingcar data.
In Section 6.5 a concept is developed from which the relevant vehicle reactions can be calculated inreal time using transfer functions based on track geometry measured independently of speed. Atransfer function represents the contribution made by a geometry component to a vehicle reaction inthe frequency domain. Geometry components include cant, level, alignment, and track gauge, andvehicle reactions include Q forces, Y forces, and horizontal and vertical vehicle body accelerations.
Figure 6.1: Dynamic model of vehicle-track interaction
x
yr
Rail padSleeperBallast
Car body
Bogie
WheelsetHertzian spring
Primary suspension
Secondary suspension
S.�ori¢ Mehanika voºnje

Poduºna dinamika ²inskih vozilaKretanje voza u krivini
Interakcija ²inskih vozila i kolosekaVinklerova podloga
Naponski talasi u tlu
Najjednostavniji model: pokretne sileModeli polovine vagonaSloºeniji ra£unski modeli
Sloºeniji model vagona i koloseka
S.�ori¢ Mehanika voºnje

Poduºna dinamika ²inskih vozilaKretanje voza u krivini
Interakcija ²inskih vozila i kolosekaVinklerova podloga
Naponski talasi u tlu
Najjednostavniji model: pokretne sileModeli polovine vagonaSloºeniji ra£unski modeli
Sloºeniji model vagona i koloseka
S.�ori¢ Mehanika voºnje
Poduºna dinamika ²inskih vozilaKretanje voza u krivini
Interakcija ²inskih vozila i kolosekaVinklerova podloga
Naponski talasi u tlu
Najjednostavniji model: pokretne sileModeli polovine vagonaSloºeniji ra£unski modeli
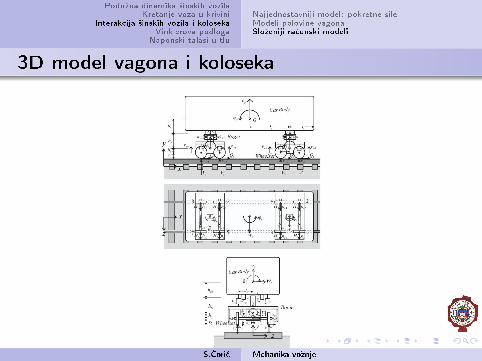
3D model vagona i koloseka
S.�ori¢ Mehanika voºnje

Poduºna dinamika ²inskih vozilaKretanje voza u krivini
Interakcija ²inskih vozila i kolosekaVinklerova podloga
Naponski talasi u tlu
Najjednostavniji model: pokretne sileModeli polovine vagonaSloºeniji ra£unski modeli
3D model vagona i koloseka
December 2, 2005 9:20 Vehicle–Bridge Interaction Dynamics bk04-001
412 Vehicle–Bridge Interaction Dynamics
each is composed of one car body, two bogies and four wheelsets, as
shown in Fig. 11.2. The total number of degrees of freedom (DOFs)
implied by each vehicle is 27. Such a model enables us to simulate
the vertical, lateral, rolling, yawing and pitching motions of the car
body, as well as the vertical and lateral contact forces between the
rails and wheels.
C Body
Bogie
Wheelset
1V3V
5V7V Sleeper
Rail
Ballast
Bridge or Soil Roadbed( )
(a)
1H
2H
3H
4H
5H
6H
7H
8H ATrack
BTrack
Sleeper
1
26
7
8 4
35
Rails
1st wheelset
2nd wheelset
3rd wheelset4th wheelset
(b)
Fig. 11.2. Train car, track and bridge models: (a) side view, (b) top view, and(c) rear view.
S.�ori¢ Mehanika voºnje

Poduºna dinamika ²inskih vozilaKretanje voza u krivini
Interakcija ²inskih vozila i kolosekaVinklerova podloga
Naponski talasi u tlu
Razli£iti modeli kolosekaDiferencijalna jedna£ina ²tapa na Vinklerovoj podloziVozovi velikih brzina: kriti£na brzina
Analiza koloseka usled kretanja voza
Modern Railway Track 13 NUMERICAL OPTIMIZATION OF RAILWAY TRACK
417
Numerical modelsHere the response quantities relating to cost efficiency, acoustic properties, and maintenance effortare considered of importance to the optimum performance of ERS. To estimate the performance of anERS design, static and dynamic models have been developed. The static response quantities suchas stresses and displacements of an embedded rail structure under various loading conditions havebeen obtained using a general purpose finite element package ANSYS.The 2-D and 3-D FE models of ERS are shown in Figure 13.5. Before these models were included inthe optimization process, they were verified by comparing the results of laboratory tests and finite ele-ment calculations [175].
It should be noted that the elastic strip under the rail, which is a common part of existing designs, isnow replaced by elastic compound. In [175] it is demonstrated that the same behaviour of a structurecan be achieved by only using a compound with adjusted E modulus and Poisson ratio.
Three loading cases have been considered to obtain the static response quantities of a structure forassessment of ERS design (Figure 13.8). The dynamic responses of ERS have been obtained usinga finite element program RAIL that is described in Section 6.9. The numerical mode of ERS, builtusing RAIL, is shown in Figure 13.6. Here, the application of RAIL focuses on two aspects, namelyacoustic noise produced by a track and wheel-rail wear.
In order to ensure that the static and dynamic models describe the behaviour of the same ERS, theyhave been coupled to each other by adjusting geometrical properties such as cross-sectional momentof inertia, etc. of the rails in the dynamic analysis based on the parameters of the static model. Also,the static and dynamic vertical stiffness of ERS has been correlated. To determine the static stiffnessof a track the vertical load has been applied at the top of the rail head as shown in Figure 13.8a.The static ( ) and dynamic ( ) vertical stiffness are then calculated as and
( is the vertical displacement of the rail corresponding to this loading case).
Figure 13.5: 3-D (a) and 2-D (b) finite element models of ERS with SA42 rail
Figure 13.6: RAIL model of ERS (moving train loading case)
Elastic bed
Rail
Slab
Elastic compound
Kstat Kdyn Kstat Fy uy 1,⁄=Kdyn 2Kstat= uy 1,
S.�ori¢ Mehanika voºnje

Poduºna dinamika ²inskih vozilaKretanje voza u krivini
Interakcija ²inskih vozila i kolosekaVinklerova podloga
Naponski talasi u tlu
Razli£iti modeli kolosekaDiferencijalna jedna£ina ²tapa na Vinklerovoj podloziVozovi velikih brzina: kriti£na brzina
Sadrºaj
1 Poduºna dinamika ²inskih vozilaVoz kao jedna materijalna ta£kaVoz kao sistem materijalnih ta£aka
2 Kretanje voza u kriviniUravnoteºuju¢a brzina
3 Interakcija ²inskih vozila i kolosekaNajjednostavniji model: pokretne sileModeli polovine vagonaSloºeniji ra£unski modeli
4 Vinklerova podlogaRazli£iti modeli kolosekaDiferencijalna jedna£ina ²tapa na Vinklerovoj podloziVozovi velikih brzina: kriti£na brzina
5 Naponski talasi u tluVrste naponskih talasaBrzine prostiranja talasaPropagacija naponskih talasa kroz tlo
S.�ori¢ Mehanika voºnje

Poduºna dinamika ²inskih vozilaKretanje voza u krivini
Interakcija ²inskih vozila i kolosekaVinklerova podloga
Naponski talasi u tlu
Razli£iti modeli kolosekaDiferencijalna jedna£ina ²tapa na Vinklerovoj podloziVozovi velikih brzina: kriti£na brzina
Vertikalna dinamika ²inskih vozila
Analiza koloseka usled kretanja voza
Najprostija analiza koloseka:�ine se posmatraju kao kontinualni nosa£ na ∞ krutihoslonaca (pragovi, ` ≈ 0.60m)�ine se posmatraju kao kontinualan nosa£ na ∞ elasti£nihoslonaca (pragovi, ` ≈ 0.60m)�ine se posmatraju kao beskona£no dug ²tap na kontinualnimelasti£nim osloncimaAnaliza ²tapa na Winkler-ovoj podlozi (linearna zavisnost sila -ugib)
S.�ori¢ Mehanika voºnje

Poduºna dinamika ²inskih vozilaKretanje voza u krivini
Interakcija ²inskih vozila i kolosekaVinklerova podloga
Naponski talasi u tlu
Razli£iti modeli kolosekaDiferencijalna jedna£ina ²tapa na Vinklerovoj podloziVozovi velikih brzina: kriti£na brzina
�tap na kontinualnoj Winklerovoj podlozi
S.�ori¢ Mehanika voºnje

Poduºna dinamika ²inskih vozilaKretanje voza u krivini
Interakcija ²inskih vozila i kolosekaVinklerova podloga
Naponski talasi u tlu
Razli£iti modeli kolosekaDiferencijalna jedna£ina ²tapa na Vinklerovoj podloziVozovi velikih brzina: kriti£na brzina
Winklerovoa podloga
S.�ori¢ Mehanika voºnje

Poduºna dinamika ²inskih vozilaKretanje voza u krivini
Interakcija ²inskih vozila i kolosekaVinklerova podloga
Naponski talasi u tlu
Razli£iti modeli kolosekaDiferencijalna jedna£ina ²tapa na Vinklerovoj podloziVozovi velikih brzina: kriti£na brzina
�tap na kontinualnoj Winklerovoj podlozi
S.�ori¢ Mehanika voºnje

Poduºna dinamika ²inskih vozilaKretanje voza u krivini
Interakcija ²inskih vozila i kolosekaVinklerova podloga
Naponski talasi u tlu
Razli£iti modeli kolosekaDiferencijalna jedna£ina ²tapa na Vinklerovoj podloziVozovi velikih brzina: kriti£na brzina
�tap na diskretnoj Winklerovoj podlozi
S.�ori¢ Mehanika voºnje
Poduºna dinamika ²inskih vozilaKretanje voza u krivini
Interakcija ²inskih vozila i kolosekaVinklerova podloga
Naponski talasi u tlu
Razli£iti modeli kolosekaDiferencijalna jedna£ina ²tapa na Vinklerovoj podloziVozovi velikih brzina: kriti£na brzina
Sloºenije modeliranje koloseka
S.�ori¢ Mehanika voºnje

Poduºna dinamika ²inskih vozilaKretanje voza u krivini
Interakcija ²inskih vozila i kolosekaVinklerova podloga
Naponski talasi u tlu
Razli£iti modeli kolosekaDiferencijalna jedna£ina ²tapa na Vinklerovoj podloziVozovi velikih brzina: kriti£na brzina
Modeliranje koloseka primenom metode kona£nihelemenata
S.�ori¢ Mehanika voºnje

Poduºna dinamika ²inskih vozilaKretanje voza u krivini
Interakcija ²inskih vozila i kolosekaVinklerova podloga
Naponski talasi u tlu
Razli£iti modeli kolosekaDiferencijalna jedna£ina ²tapa na Vinklerovoj podloziVozovi velikih brzina: kriti£na brzina
�tap na kontinualnoj Winklerovoj podlozi
S.�ori¢ Mehanika voºnje

Poduºna dinamika ²inskih vozilaKretanje voza u krivini
Interakcija ²inskih vozila i kolosekaVinklerova podloga
Naponski talasi u tlu
Razli£iti modeli kolosekaDiferencijalna jedna£ina ²tapa na Vinklerovoj podloziVozovi velikih brzina: kriti£na brzina
�tap na kontinualnoj Winklerovoj podlozi
S.�ori¢ Mehanika voºnje

Poduºna dinamika ²inskih vozilaKretanje voza u krivini
Interakcija ²inskih vozila i kolosekaVinklerova podloga
Naponski talasi u tlu
Razli£iti modeli kolosekaDiferencijalna jedna£ina ²tapa na Vinklerovoj podloziVozovi velikih brzina: kriti£na brzina
�tap na kontinualnoj Winklerovoj podlozi
S.�ori¢ Mehanika voºnje

Poduºna dinamika ²inskih vozilaKretanje voza u krivini
Interakcija ²inskih vozila i kolosekaVinklerova podloga
Naponski talasi u tlu
Razli£iti modeli kolosekaDiferencijalna jedna£ina ²tapa na Vinklerovoj podloziVozovi velikih brzina: kriti£na brzina
Sadrºaj
1 Poduºna dinamika ²inskih vozilaVoz kao jedna materijalna ta£kaVoz kao sistem materijalnih ta£aka
2 Kretanje voza u kriviniUravnoteºuju¢a brzina
3 Interakcija ²inskih vozila i kolosekaNajjednostavniji model: pokretne sileModeli polovine vagonaSloºeniji ra£unski modeli
4 Vinklerova podlogaRazli£iti modeli kolosekaDiferencijalna jedna£ina ²tapa na Vinklerovoj podloziVozovi velikih brzina: kriti£na brzina
5 Naponski talasi u tluVrste naponskih talasaBrzine prostiranja talasaPropagacija naponskih talasa kroz tlo
S.�ori¢ Mehanika voºnje

Poduºna dinamika ²inskih vozilaKretanje voza u krivini
Interakcija ²inskih vozila i kolosekaVinklerova podloga
Naponski talasi u tlu
Razli£iti modeli kolosekaDiferencijalna jedna£ina ²tapa na Vinklerovoj podloziVozovi velikih brzina: kriti£na brzina
Vertikalna dinamika ²inskih vozila
�tap na kontinualnoj Winklerovoj podlozi
Diferencijalna jedna£ina ravnoteºe (Winkler, 1867)
EJd4w
dx4+ kw(x) = q(x) (5)
- EJ . . . krutost ²ine na savijanje
- w = w(x) . . . ugib ²ine
- k krutost podloge (kN/m2, odn. kN/m po m duºine ²ine)
- q(x) . . . raspodeljeno optere¢enje na ²inu
S.�ori¢ Mehanika voºnje

Poduºna dinamika ²inskih vozilaKretanje voza u krivini
Interakcija ²inskih vozila i kolosekaVinklerova podloga
Naponski talasi u tlu
Razli£iti modeli kolosekaDiferencijalna jedna£ina ²tapa na Vinklerovoj podloziVozovi velikih brzina: kriti£na brzina
Vertikalna dinamika ²inskih vozila
�tap na kontinualnoj Winklerovoj podlozi
Uvode¢i oznaku
β =
(k
4EJ
) 14
Op²ti integral dif. jed. (5), odn. re²enje homogene jedna£ine,dato je u obliku
wh(x) = eβx(C1 sinβx+ C2 cosβx)
+ e−βx(C3 sinβx+ C4 cosβx)(6)
gde su C1 do C4 nepoznate integracione konstante
S.�ori¢ Mehanika voºnje

Poduºna dinamika ²inskih vozilaKretanje voza u krivini
Interakcija ²inskih vozila i kolosekaVinklerova podloga
Naponski talasi u tlu
Razli£iti modeli kolosekaDiferencijalna jedna£ina ²tapa na Vinklerovoj podloziVozovi velikih brzina: kriti£na brzina
Vertikalna dinamika ²inskih vozila
�tap na kontinualnoj Winklerovoj podlozi
Integracione konstante C1 do C4 se odre�uju iz odgovaraju¢ihgrani£nih uslova
Re²enje nehomogene dif. jedna£ine (5), odn. partikularniintegral, dat je sa wp(x)
Kona£no re²enje dif. jedna£ine je dato sa zbirom
w(x) = wh(x) + wp(x) (7)
Iz re²enja (7) za ugibe se zatim odre�uju momenti savijanja itransverzalne sile
S.�ori¢ Mehanika voºnje

Poduºna dinamika ²inskih vozilaKretanje voza u krivini
Interakcija ²inskih vozila i kolosekaVinklerova podloga
Naponski talasi u tlu
Razli£iti modeli kolosekaDiferencijalna jedna£ina ²tapa na Vinklerovoj podloziVozovi velikih brzina: kriti£na brzina
Sadrºaj
1 Poduºna dinamika ²inskih vozilaVoz kao jedna materijalna ta£kaVoz kao sistem materijalnih ta£aka
2 Kretanje voza u kriviniUravnoteºuju¢a brzina
3 Interakcija ²inskih vozila i kolosekaNajjednostavniji model: pokretne sileModeli polovine vagonaSloºeniji ra£unski modeli
4 Vinklerova podlogaRazli£iti modeli kolosekaDiferencijalna jedna£ina ²tapa na Vinklerovoj podloziVozovi velikih brzina: kriti£na brzina
5 Naponski talasi u tluVrste naponskih talasaBrzine prostiranja talasaPropagacija naponskih talasa kroz tlo
S.�ori¢ Mehanika voºnje

Poduºna dinamika ²inskih vozilaKretanje voza u krivini
Interakcija ²inskih vozila i kolosekaVinklerova podloga
Naponski talasi u tlu
Razli£iti modeli kolosekaDiferencijalna jedna£ina ²tapa na Vinklerovoj podloziVozovi velikih brzina: kriti£na brzina
High speed trains: v>250 km/h
Modern Railway Track 6 DYNAMIC TRACK DESIGN
121
For tracks of good quality the critical speed lies far beyond the operating speed, but with poor soilconditions or other mass/spring configurations the critical speed can be so low that special measuresare required. In case the train speed approaches the wave propagation speed, the soil may experi-ence a liquefaction type of phenomenon as seen in Figure 6.19. An actual measurement in track onsoft soil is shown in Figure 6.20.
For the undamped case (left column ofFigure 6.17) a simple formula exists [98] for thedynamic amplification:
(6.56)
6.3.4 Discrete support
The model in Figure 6.10(c), in which the rail is supported in a discrete manner, gives the bestapproximation. Such an approach also lends itself to the application of standard element programsprograms which will be discussed later in Section 6.9. These element method programs give greatflexibility as regards load forms and support conditions.
6.4 Vertical wheel response
6.4.1 Hertzian contact spring
During vehicle/track interaction the forces are transmitted by means of the wheel/rail contact area. Onaccount of the geometry of the contact area between the round wheel and the rail, the relationshipbetween force and compression, represented by the Hertzian contact spring, is not linear as hasalready been discussed in Section 2.7. The relationship between force F and indentation y of the con-tact surface can be written as:
(6.57)
in which cH [Nm-3/2] is a constant depending on the radii and the material properties.
Figure 6.20: Actual measurement on soft soil
-14
-13
-12
-11
-10
-9
-8
-7
-6
-5
120 150 180 210 240
Running speed [km/h]
Verti
cal d
ispl
acem
ent [
mm
]
Critical train speed
225
High speed trainIC train
-14
-13
-12
-11
-10
-9
-8
-7
-6
-5
120 150 180 210 240
Running speed [km/h]
Verti
cal d
ispl
acem
ent [
mm
]
Critical train speed
225
High speed trainIC trainHigh speed trainIC train
Figure 6.19: Wave propagation at high speed
c GT =
ρc G
T =ρ
wdynwstat------------ 1
1 vvcr-------
2–
---------------------------------=
F cH y3 2⁄=
S.�ori¢ Mehanika voºnje

Poduºna dinamika ²inskih vozilaKretanje voza u krivini
Interakcija ²inskih vozila i kolosekaVinklerova podloga
Naponski talasi u tlu
Razli£iti modeli kolosekaDiferencijalna jedna£ina ²tapa na Vinklerovoj podloziVozovi velikih brzina: kriti£na brzina
High speed trains: kriti£na brzina
Modern Railway Track 6 DYNAMIC TRACK DESIGN
121
For tracks of good quality the critical speed lies far beyond the operating speed, but with poor soilconditions or other mass/spring configurations the critical speed can be so low that special measuresare required. In case the train speed approaches the wave propagation speed, the soil may experi-ence a liquefaction type of phenomenon as seen in Figure 6.19. An actual measurement in track onsoft soil is shown in Figure 6.20.
For the undamped case (left column ofFigure 6.17) a simple formula exists [98] for thedynamic amplification:
(6.56)
6.3.4 Discrete support
The model in Figure 6.10(c), in which the rail is supported in a discrete manner, gives the bestapproximation. Such an approach also lends itself to the application of standard element programsprograms which will be discussed later in Section 6.9. These element method programs give greatflexibility as regards load forms and support conditions.
6.4 Vertical wheel response
6.4.1 Hertzian contact spring
During vehicle/track interaction the forces are transmitted by means of the wheel/rail contact area. Onaccount of the geometry of the contact area between the round wheel and the rail, the relationshipbetween force and compression, represented by the Hertzian contact spring, is not linear as hasalready been discussed in Section 2.7. The relationship between force F and indentation y of the con-tact surface can be written as:
(6.57)
in which cH [Nm-3/2] is a constant depending on the radii and the material properties.
Figure 6.20: Actual measurement on soft soil
-14
-13
-12
-11
-10
-9
-8
-7
-6
-5
120 150 180 210 240
Running speed [km/h]
Verti
cal d
ispl
acem
ent [
mm
]
Critical train speed
225
High speed trainIC train
-14
-13
-12
-11
-10
-9
-8
-7
-6
-5
120 150 180 210 240
Running speed [km/h]
Verti
cal d
ispl
acem
ent [
mm
]
Critical train speed
225
High speed trainIC trainHigh speed trainIC train
Figure 6.19: Wave propagation at high speed
c GT =
ρc G
T =ρ
wdynwstat------------ 1
1 vvcr-------
2–
---------------------------------=
F cH y3 2⁄=
S.�ori¢ Mehanika voºnje

Poduºna dinamika ²inskih vozilaKretanje voza u krivini
Interakcija ²inskih vozila i kolosekaVinklerova podloga
Naponski talasi u tlu
Razli£iti modeli kolosekaDiferencijalna jedna£ina ²tapa na Vinklerovoj podloziVozovi velikih brzina: kriti£na brzina
Vertikalna dinamika ²inskih vozila
High speed trains: kriti£na brzina
Kriti£na brzina voza: ako je bliska sa brzinom prostiranjaRaylegih-evih (R) talasa u tlu
Mogu da nastanu veoma izraºene vibracije koloseka i okolnogtla
Fenomen je sli£an probijanju zvu£nog zida supersoni£nogaviona
Uo£eno je na pojedinim deonicama sa lo²im (neodgovaraju¢im)tlom - slojevi glinovitog tla
Fenomen je uo£en u �vedskoj (Swedish West Coast Line)
S.�ori¢ Mehanika voºnje

Poduºna dinamika ²inskih vozilaKretanje voza u krivini
Interakcija ²inskih vozila i kolosekaVinklerova podloga
Naponski talasi u tlu
Vrste naponskih talasaBrzine prostiranja talasaPropagacija naponskih talasa kroz tlo
Sadrºaj
1 Poduºna dinamika ²inskih vozilaVoz kao jedna materijalna ta£kaVoz kao sistem materijalnih ta£aka
2 Kretanje voza u kriviniUravnoteºuju¢a brzina
3 Interakcija ²inskih vozila i kolosekaNajjednostavniji model: pokretne sileModeli polovine vagonaSloºeniji ra£unski modeli
4 Vinklerova podlogaRazli£iti modeli kolosekaDiferencijalna jedna£ina ²tapa na Vinklerovoj podloziVozovi velikih brzina: kriti£na brzina
5 Naponski talasi u tluVrste naponskih talasaBrzine prostiranja talasaPropagacija naponskih talasa kroz tlo
S.�ori¢ Mehanika voºnje

Poduºna dinamika ²inskih vozilaKretanje voza u krivini
Interakcija ²inskih vozila i kolosekaVinklerova podloga
Naponski talasi u tlu
Vrste naponskih talasaBrzine prostiranja talasaPropagacija naponskih talasa kroz tlo
Naponski talasi u tlu
Zapreminski i povr²inski talasi
Naponski talasi u tlu su oscilatorna kretanja £estica tla
Nastaju usled zemljotresa, eksplozija, udara u tlo (pobijanje²ipova, industrijski £eki¢i i razne ma²ine), kretanja vozila,posebno ²inskih, . . .Dve osnovne vrste naponskih talasa
Zapreminski talasi- Primarni (kompresioni, longitudinalni) ili P talasi- Sekundarni (smi£u¢i, transverzalni) ili S talasi
Povr²inski talasi- Rayleigh-evi ili R talasi (ili P-SV talasi)Love-ovi ili L talasi (ili SH talasi)
S.�ori¢ Mehanika voºnje

Poduºna dinamika ²inskih vozilaKretanje voza u krivini
Interakcija ²inskih vozila i kolosekaVinklerova podloga
Naponski talasi u tlu
Vrste naponskih talasaBrzine prostiranja talasaPropagacija naponskih talasa kroz tlo
Zapreminski P i S talasi
S.�ori¢ Mehanika voºnje

Poduºna dinamika ²inskih vozilaKretanje voza u krivini
Interakcija ²inskih vozila i kolosekaVinklerova podloga
Naponski talasi u tlu
Vrste naponskih talasaBrzine prostiranja talasaPropagacija naponskih talasa kroz tlo
Povr²inski R i L talasi
S.�ori¢ Mehanika voºnje

Poduºna dinamika ²inskih vozilaKretanje voza u krivini
Interakcija ²inskih vozila i kolosekaVinklerova podloga
Naponski talasi u tlu
Vrste naponskih talasaBrzine prostiranja talasaPropagacija naponskih talasa kroz tlo
Sadrºaj
1 Poduºna dinamika ²inskih vozilaVoz kao jedna materijalna ta£kaVoz kao sistem materijalnih ta£aka
2 Kretanje voza u kriviniUravnoteºuju¢a brzina
3 Interakcija ²inskih vozila i kolosekaNajjednostavniji model: pokretne sileModeli polovine vagonaSloºeniji ra£unski modeli
4 Vinklerova podlogaRazli£iti modeli kolosekaDiferencijalna jedna£ina ²tapa na Vinklerovoj podloziVozovi velikih brzina: kriti£na brzina
5 Naponski talasi u tluVrste naponskih talasaBrzine prostiranja talasaPropagacija naponskih talasa kroz tlo
S.�ori¢ Mehanika voºnje

Poduºna dinamika ²inskih vozilaKretanje voza u krivini
Interakcija ²inskih vozila i kolosekaVinklerova podloga
Naponski talasi u tlu
Vrste naponskih talasaBrzine prostiranja talasaPropagacija naponskih talasa kroz tlo
Naponski talasi u tlu
Brzina prostiranja talasa kroz tlo
Brzina prostiranja P i S talasa
vP =
√λ+ 2µ
ρ=
√M
ρvS =
õ
ρ=
√G
ρ(8)
gde su λ i µ Lameove konstante, a ρ gustina sredine kroz kojuse prostire talas
E i G su modul elasti£nosti i modul smicanja tla,
dok je M modulus dat sa
M =1− ν
(1 + ν)(1− 2ν)E
S.�ori¢ Mehanika voºnje

Poduºna dinamika ²inskih vozilaKretanje voza u krivini
Interakcija ²inskih vozila i kolosekaVinklerova podloga
Naponski talasi u tlu
Vrste naponskih talasaBrzine prostiranja talasaPropagacija naponskih talasa kroz tlo
Sadrºaj
1 Poduºna dinamika ²inskih vozilaVoz kao jedna materijalna ta£kaVoz kao sistem materijalnih ta£aka
2 Kretanje voza u kriviniUravnoteºuju¢a brzina
3 Interakcija ²inskih vozila i kolosekaNajjednostavniji model: pokretne sileModeli polovine vagonaSloºeniji ra£unski modeli
4 Vinklerova podlogaRazli£iti modeli kolosekaDiferencijalna jedna£ina ²tapa na Vinklerovoj podloziVozovi velikih brzina: kriti£na brzina
5 Naponski talasi u tluVrste naponskih talasaBrzine prostiranja talasaPropagacija naponskih talasa kroz tlo
S.�ori¢ Mehanika voºnje

Poduºna dinamika ²inskih vozilaKretanje voza u krivini
Interakcija ²inskih vozila i kolosekaVinklerova podloga
Naponski talasi u tlu
Vrste naponskih talasaBrzine prostiranja talasaPropagacija naponskih talasa kroz tlo
Naponski talasi u tlu
Brzina prostiranja talasa kroz tlo
Brzina prostiranja R talasa je oko 0.95 vS
Prema tome, vP > vS > vR
Zapreminski talasi (iz ta£kastog izvora) se prostiru pravolinijskiradijalno sa sfernim talasnim frontom
Povr²inski R talasi se prostiru pravolinijski radijalno sacilindri£nim talasnim frontom
Oko 67% energije se prenosi sa povr²inskim R talasima, oko26% preko zapreminskih S talasa i oko 7% energije se prenosiputem P talasa
Povr²inski R talasi su najzna£ajniji naponski poreme¢aj napovr²ini tla
S.�ori¢ Mehanika voºnje

Poduºna dinamika ²inskih vozilaKretanje voza u krivini
Interakcija ²inskih vozila i kolosekaVinklerova podloga
Naponski talasi u tlu
Vrste naponskih talasaBrzine prostiranja talasaPropagacija naponskih talasa kroz tlo
Naponski talasi u tlu
Propagacija naponskih talasa kroz tlo
Zakon propagacije (atenuacije) naponskih talasa kroz tlo je
v = v1
(R1
R
)ne−α(R−R1) (9)
- v i v1 amplitude brzina na rastojanju R i R1 (izvor talasa)
- n koe�cijent geometrijske atenuacije (obi£no n = 0.5)
- α koe�cijent materijalne atenuacije dat sa α = 2πξλ
- ξ koe�cijent relativnog prigu²enja tla
- λ talasna tuºina talasa, data sa λ = cf gde su c brzina
prostiranja talasa, a f dominantna frekvencija
S.�ori¢ Mehanika voºnje

Poduºna dinamika ²inskih vozilaKretanje voza u krivini
Interakcija ²inskih vozila i kolosekaVinklerova podloga
Naponski talasi u tlu
Vrste naponskih talasaBrzine prostiranja talasaPropagacija naponskih talasa kroz tlo
Naponski talasi u tlu
Propagacija naponskih talasa kroz tlo
Iz zakona (9) se vidi da se amplitude oscilovanja talasasmanjuju sa duºinom propagacije
Frekventni sastav talasa se ne menja sa duºinom prostiranja
Oscilovanje tla se prenosi (horizontalno) do temelja obliºnjihzgrada
Oscilovanje temelja se prenosi vertikalno kroz zidove i stubove,a zatim horizontalno na svaku tavanicu
Oscilovanje tavanica moºe da smeta ljudima
S.�ori¢ Mehanika voºnje

Poduºna dinamika ²inskih vozilaKretanje voza u krivini
Interakcija ²inskih vozila i kolosekaVinklerova podloga
Naponski talasi u tlu
Vrste naponskih talasaBrzine prostiranja talasaPropagacija naponskih talasa kroz tlo
Gradili²te u okolini Moskve
S.�ori¢ Mehanika voºnje

Poduºna dinamika ²inskih vozilaKretanje voza u krivini
Interakcija ²inskih vozila i kolosekaVinklerova podloga
Naponski talasi u tlu
Vrste naponskih talasaBrzine prostiranja talasaPropagacija naponskih talasa kroz tlo
Kretanje te²kog vozila preko prepreke
S.�ori¢ Mehanika voºnje

Poduºna dinamika ²inskih vozilaKretanje voza u krivini
Interakcija ²inskih vozila i kolosekaVinklerova podloga
Naponski talasi u tlu
Vrste naponskih talasaBrzine prostiranja talasaPropagacija naponskih talasa kroz tlo
Merenje vibracija kod prepreke i na gradili²tu
S.�ori¢ Mehanika voºnje

Poduºna dinamika ²inskih vozilaKretanje voza u krivini
Interakcija ²inskih vozila i kolosekaVinklerova podloga
Naponski talasi u tlu
Vrste naponskih talasaBrzine prostiranja talasaPropagacija naponskih talasa kroz tlo
�elezni£ka stanica Prokop u Beogradu
S.�ori¢ Mehanika voºnje

Poduºna dinamika ²inskih vozilaKretanje voza u krivini
Interakcija ²inskih vozila i kolosekaVinklerova podloga
Naponski talasi u tlu
Vrste naponskih talasaBrzine prostiranja talasaPropagacija naponskih talasa kroz tlo
�elezni£ka stanica Prokop u Beogradu
S.�ori¢ Mehanika voºnje

Poduºna dinamika ²inskih vozilaKretanje voza u krivini
Interakcija ²inskih vozila i kolosekaVinklerova podloga
Naponski talasi u tlu
Vrste naponskih talasaBrzine prostiranja talasaPropagacija naponskih talasa kroz tlo
Vertikalne vibracije temelja stubova za te²ki voz
S.�ori¢ Mehanika voºnje

Poduºna dinamika ²inskih vozilaKretanje voza u krivini
Interakcija ²inskih vozila i kolosekaVinklerova podloga
Naponski talasi u tlu
Vrste naponskih talasaBrzine prostiranja talasaPropagacija naponskih talasa kroz tlo
Ra£unski model lamele plo£a na koti 105
S.�ori¢ Mehanika voºnje

Poduºna dinamika ²inskih vozilaKretanje voza u krivini
Interakcija ²inskih vozila i kolosekaVinklerova podloga
Naponski talasi u tlu
Vrste naponskih talasaBrzine prostiranja talasaPropagacija naponskih talasa kroz tlo
Ra£unska simulacija ubrzanja na plo£i na koti 105
S.�ori¢ Mehanika voºnje

Poduºna dinamika ²inskih vozilaKretanje voza u krivini
Interakcija ²inskih vozila i kolosekaVinklerova podloga
Naponski talasi u tlu
Vrste naponskih talasaBrzine prostiranja talasaPropagacija naponskih talasa kroz tlo
Pri£vrsni sistem "Vanguard"
S.�ori¢ Mehanika voºnje