Mechanics Kinematics in 1 Dimension - De Anza...
52
Mechanics Kinematics in 1 Dimension Lana Sheridan De Anza College Sept 26, 2018
Transcript of Mechanics Kinematics in 1 Dimension - De Anza...
-
MechanicsKinematics in 1 Dimension
Lana Sheridan
De Anza College
Sept 26, 2018
-
Last time
• units
• dimensional analysis
• unit conversions
• scientific notation
-
Overview
• scalars and vectors
• kinematic quantites
• interpreting graphs of kinematic quantities
-
Unit Conversion ExamplesIt may be necessary to change units several times to get to theunit you need.
What is 60.0 mi/hr in m/s? (mi is miles, hr is hours)
1 mi = 1.609 km
-
Unit Conversion ExamplesIt may be necessary to change units several times to get to theunit you need.
What is 60.0 mi/hr in m/s? (mi is miles, hr is hours)
1 mi = 1.609 km
-
Kinematics in 1-dimension
We begin by studying motion along a single line.
This will encompass situations like
• cars traveling along straight roads
• objects falling straight down under gravity
-
Vectors and Scalars
scalar
A scalar quantity indicates an amount. It is represented by a realnumber. (Assuming it is a physical quantity.)
vector
A vector quantity indicates both an amount (magnitude) and adirection. It is represented by a real number for each possibledirection, or a real number and (an) angle(s).
-
Vectors and Scalars
scalar
A scalar quantity indicates an amount. It is represented by a realnumber. (Assuming it is a physical quantity.)
vector
A vector quantity indicates both an amount (magnitude) and adirection. It is represented by a real number for each possibledirection, or a real number and (an) angle(s).
-
Notation for Vectors
In the lecture notes vector variables are represented using boldvariables.
Example:k is a scalarx is a vector
In the textbook and in writing, vectors are often represented withan over-arrow: ~x
The magnitude of a vector, x is written:
|x| = x
-
Examples of Scalars and Vectors
Some physical quantities that are scalars are
• temperature• mass• pressure
Some physical quantities that are vectors are
• velocity• force
-
Distance vs Displacement
How far are two points from one another?
Distance is the length of a path that connects the two points.
Displacement is the length together with the direction of astraight line that connects the starting position to the finalposition.
Displacement is a vector.
-
Position
Quantities
position x
displacement ∆x = xf − xi
distance d
Position and displacement are vector quantities.
Position and displacement can be positive or negativenumbers.
Distance is a scalar. It is always a positive number.
-
PositionQuantities
position x
displacement ∆x = xf − xi
distance d
Position and displacement are vector quantities.
Position and displacement can be positive or negativenumbers.
Distance is a scalar. It is always a positive number.
-
Position
Quantities
position x
displacement ∆x = xf − xi
distance d
Position and displacement are vector quantities.
Position and displacement can be positive or negativenumbers.
Distance is a scalar. It is always a positive number.
SI units: meters, m
-
Position, Displacement, Distance Example
The starting position of the car is xi = 30 m i, the final position isxf = 50 m i.
The distance the car travels is d = 50 m − 30 m = 20 m.
22 Chapter 2 Motion in One Dimension
obtain reasonably accurate data about its orbit. This approximation is justified because the radius of the Earth’s orbit is large compared with the dimensions of the Earth and the Sun. As an example on a much smaller scale, it is possible to explain the pressure exerted by a gas on the walls of a container by treating the gas molecules as particles, without regard for the internal structure of the molecules.
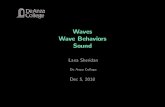
2.1 Position, Velocity, and SpeedA particle’s position x is the location of the particle with respect to a chosen ref-erence point that we can consider to be the origin of a coordinate system. The motion of a particle is completely known if the particle’s position in space is known at all times. Consider a car moving back and forth along the x axis as in Figure 2.1a. When we begin collecting position data, the car is 30 m to the right of the reference posi-tion x 5 0. We will use the particle model by identifying some point on the car, perhaps the front door handle, as a particle representing the entire car. We start our clock, and once every 10 s we note the car’s position. As you can see from Table 2.1, the car moves to the right (which we have defined as the positive direction) during the first 10 s of motion, from position ! to position ". After ", the position values begin to decrease, suggesting the car is backing up from position " through position #. In fact, at $, 30 s after we start measuring, the car is at the origin of coordinates (see Fig. 2.1a). It continues moving to the left and is more than 50 m to the left of x 5 0 when we stop recording information after our sixth data point. A graphical representation of this information is presented in Figure 2.1b. Such a plot is called a position–time graph. Notice the alternative representations of information that we have used for the motion of the car. Figure 2.1a is a pictorial representation, whereas Figure 2.1b is a graphical representation. Table 2.1 is a tabular representation of the same information. Using an alternative representation is often an excellent strategy for understanding the situation in a given problem. The ultimate goal in many problems is a math-
Position
Position of the Car at Various Times
Position t (s) x (m)
! 0 30" 10 52% 20 38$ 30 0& 40 237# 50 253
Table 2.1
!60 !50 !40 !30 !20 !10 0 10 20 30 40 50 60x (m)
! "
The car moves to the right between positions ! and ".
!60 !50 !40 !30 !20 !10 0 10 20 30 40 50 60x (m)
$ %
The car moves to the left between positions % and #.
a
!
10 20 30 40 500
!40
!60
!20
0
20
40
60
"t
"x
x (m)
t (s)
"
%
$
&
#
b
Figure 2.1 A car moves back and forth along a straight line. Because we are interested only in the car’s translational motion, we can model it as a particle. Several representations of the information about the motion of the car can be used. Table 2.1 is a tabular representation of the information. (a) A pictorial representation of the motion of the car. (b) A graphical representation (position–time graph) of the motion of the car.
The displacement of the car is ∆x = xf − xi = 20 m i.
−−−−−→∆x
-
Position, Displacement, Distance ExampleThe starting position of the car is xi = 30 m i, the final position isxf = −60 m i.
The distance the car travels is d = 130 m.
22 Chapter 2 Motion in One Dimension
obtain reasonably accurate data about its orbit. This approximation is justified because the radius of the Earth’s orbit is large compared with the dimensions of the Earth and the Sun. As an example on a much smaller scale, it is possible to explain the pressure exerted by a gas on the walls of a container by treating the gas molecules as particles, without regard for the internal structure of the molecules.
2.1 Position, Velocity, and SpeedA particle’s position x is the location of the particle with respect to a chosen ref-erence point that we can consider to be the origin of a coordinate system. The motion of a particle is completely known if the particle’s position in space is known at all times. Consider a car moving back and forth along the x axis as in Figure 2.1a. When we begin collecting position data, the car is 30 m to the right of the reference posi-tion x 5 0. We will use the particle model by identifying some point on the car, perhaps the front door handle, as a particle representing the entire car. We start our clock, and once every 10 s we note the car’s position. As you can see from Table 2.1, the car moves to the right (which we have defined as the positive direction) during the first 10 s of motion, from position ! to position ". After ", the position values begin to decrease, suggesting the car is backing up from position " through position #. In fact, at $, 30 s after we start measuring, the car is at the origin of coordinates (see Fig. 2.1a). It continues moving to the left and is more than 50 m to the left of x 5 0 when we stop recording information after our sixth data point. A graphical representation of this information is presented in Figure 2.1b. Such a plot is called a position–time graph. Notice the alternative representations of information that we have used for the motion of the car. Figure 2.1a is a pictorial representation, whereas Figure 2.1b is a graphical representation. Table 2.1 is a tabular representation of the same information. Using an alternative representation is often an excellent strategy for understanding the situation in a given problem. The ultimate goal in many problems is a math-
Position
Position of the Car at Various Times
Position t (s) x (m)
! 0 30" 10 52% 20 38$ 30 0& 40 237# 50 253
Table 2.1
!60 !50 !40 !30 !20 !10 0 10 20 30 40 50 60x (m)
! "
The car moves to the right between positions ! and ".
!60 !50 !40 !30 !20 !10 0 10 20 30 40 50 60x (m)
$ %
The car moves to the left between positions % and #.
a
!
10 20 30 40 500
!40
!60
!20
0
20
40
60
"t
"x
x (m)
t (s)
"
%
$
&
#
b
Figure 2.1 A car moves back and forth along a straight line. Because we are interested only in the car’s translational motion, we can model it as a particle. Several representations of the information about the motion of the car can be used. Table 2.1 is a tabular representation of the information. (a) A pictorial representation of the motion of the car. (b) A graphical representation (position–time graph) of the motion of the car.
The displacement of the car is
∆x = xf − xi= (−60i) − 30i m
= −90 m i
←−−−−−−−−−−−−−−−−−−−−−−−−−∆x
-
Position vs. Time Graphs
22 Chapter 2 Motion in One Dimension
obtain reasonably accurate data about its orbit. This approximation is justified because the radius of the Earth’s orbit is large compared with the dimensions of the Earth and the Sun. As an example on a much smaller scale, it is possible to explain the pressure exerted by a gas on the walls of a container by treating the gas molecules as particles, without regard for the internal structure of the molecules.
2.1 Position, Velocity, and SpeedA particle’s position x is the location of the particle with respect to a chosen ref-erence point that we can consider to be the origin of a coordinate system. The motion of a particle is completely known if the particle’s position in space is known at all times. Consider a car moving back and forth along the x axis as in Figure 2.1a. When we begin collecting position data, the car is 30 m to the right of the reference posi-tion x 5 0. We will use the particle model by identifying some point on the car, perhaps the front door handle, as a particle representing the entire car. We start our clock, and once every 10 s we note the car’s position. As you can see from Table 2.1, the car moves to the right (which we have defined as the positive direction) during the first 10 s of motion, from position ! to position ". After ", the position values begin to decrease, suggesting the car is backing up from position " through position #. In fact, at $, 30 s after we start measuring, the car is at the origin of coordinates (see Fig. 2.1a). It continues moving to the left and is more than 50 m to the left of x 5 0 when we stop recording information after our sixth data point. A graphical representation of this information is presented in Figure 2.1b. Such a plot is called a position–time graph. Notice the alternative representations of information that we have used for the motion of the car. Figure 2.1a is a pictorial representation, whereas Figure 2.1b is a graphical representation. Table 2.1 is a tabular representation of the same information. Using an alternative representation is often an excellent strategy for understanding the situation in a given problem. The ultimate goal in many problems is a math-
Position
Position of the Car at Various Times
Position t (s) x (m)
! 0 30" 10 52% 20 38$ 30 0& 40 237# 50 253
Table 2.1
!60 !50 !40 !30 !20 !10 0 10 20 30 40 50 60x (m)
! "
The car moves to the right between positions ! and ".
!60 !50 !40 !30 !20 !10 0 10 20 30 40 50 60x (m)
$ %
The car moves to the left between positions % and #.
a
!
10 20 30 40 500
!40
!60
!20
0
20
40
60
"t
"x
x (m)
t (s)
"
%
$
&
#
b
Figure 2.1 A car moves back and forth along a straight line. Because we are interested only in the car’s translational motion, we can model it as a particle. Several representations of the information about the motion of the car can be used. Table 2.1 is a tabular representation of the information. (a) A pictorial representation of the motion of the car. (b) A graphical representation (position–time graph) of the motion of the car.
1Figures from Serway & Jewett
-
Position vs. Time Graphs
22 Chapter 2 Motion in One Dimension
obtain reasonably accurate data about its orbit. This approximation is justified because the radius of the Earth’s orbit is large compared with the dimensions of the Earth and the Sun. As an example on a much smaller scale, it is possible to explain the pressure exerted by a gas on the walls of a container by treating the gas molecules as particles, without regard for the internal structure of the molecules.
2.1 Position, Velocity, and SpeedA particle’s position x is the location of the particle with respect to a chosen ref-erence point that we can consider to be the origin of a coordinate system. The motion of a particle is completely known if the particle’s position in space is known at all times. Consider a car moving back and forth along the x axis as in Figure 2.1a. When we begin collecting position data, the car is 30 m to the right of the reference posi-tion x 5 0. We will use the particle model by identifying some point on the car, perhaps the front door handle, as a particle representing the entire car. We start our clock, and once every 10 s we note the car’s position. As you can see from Table 2.1, the car moves to the right (which we have defined as the positive direction) during the first 10 s of motion, from position ! to position ". After ", the position values begin to decrease, suggesting the car is backing up from position " through position #. In fact, at $, 30 s after we start measuring, the car is at the origin of coordinates (see Fig. 2.1a). It continues moving to the left and is more than 50 m to the left of x 5 0 when we stop recording information after our sixth data point. A graphical representation of this information is presented in Figure 2.1b. Such a plot is called a position–time graph. Notice the alternative representations of information that we have used for the motion of the car. Figure 2.1a is a pictorial representation, whereas Figure 2.1b is a graphical representation. Table 2.1 is a tabular representation of the same information. Using an alternative representation is often an excellent strategy for understanding the situation in a given problem. The ultimate goal in many problems is a math-
Position
Position of the Car at Various Times
Position t (s) x (m)
! 0 30" 10 52% 20 38$ 30 0& 40 237# 50 253
Table 2.1
!60 !50 !40 !30 !20 !10 0 10 20 30 40 50 60x (m)
! "
The car moves to the right between positions ! and ".
!60 !50 !40 !30 !20 !10 0 10 20 30 40 50 60x (m)
$ %
The car moves to the left between positions % and #.
a
!
10 20 30 40 500
!40
!60
!20
0
20
40
60
"t
"x
x (m)
t (s)
"
%
$
&
#
b
Figure 2.1 A car moves back and forth along a straight line. Because we are interested only in the car’s translational motion, we can model it as a particle. Several representations of the information about the motion of the car can be used. Table 2.1 is a tabular representation of the information. (a) A pictorial representation of the motion of the car. (b) A graphical representation (position–time graph) of the motion of the car.
1Figures from Serway & Jewett
-
Position vs. Time Graphs
22 Chapter 2 Motion in One Dimension
obtain reasonably accurate data about its orbit. This approximation is justified because the radius of the Earth’s orbit is large compared with the dimensions of the Earth and the Sun. As an example on a much smaller scale, it is possible to explain the pressure exerted by a gas on the walls of a container by treating the gas molecules as particles, without regard for the internal structure of the molecules.
2.1 Position, Velocity, and SpeedA particle’s position x is the location of the particle with respect to a chosen ref-erence point that we can consider to be the origin of a coordinate system. The motion of a particle is completely known if the particle’s position in space is known at all times. Consider a car moving back and forth along the x axis as in Figure 2.1a. When we begin collecting position data, the car is 30 m to the right of the reference posi-tion x 5 0. We will use the particle model by identifying some point on the car, perhaps the front door handle, as a particle representing the entire car. We start our clock, and once every 10 s we note the car’s position. As you can see from Table 2.1, the car moves to the right (which we have defined as the positive direction) during the first 10 s of motion, from position ! to position ". After ", the position values begin to decrease, suggesting the car is backing up from position " through position #. In fact, at $, 30 s after we start measuring, the car is at the origin of coordinates (see Fig. 2.1a). It continues moving to the left and is more than 50 m to the left of x 5 0 when we stop recording information after our sixth data point. A graphical representation of this information is presented in Figure 2.1b. Such a plot is called a position–time graph. Notice the alternative representations of information that we have used for the motion of the car. Figure 2.1a is a pictorial representation, whereas Figure 2.1b is a graphical representation. Table 2.1 is a tabular representation of the same information. Using an alternative representation is often an excellent strategy for understanding the situation in a given problem. The ultimate goal in many problems is a math-
Position
Position of the Car at Various Times
Position t (s) x (m)
! 0 30" 10 52% 20 38$ 30 0& 40 237# 50 253
Table 2.1
!60 !50 !40 !30 !20 !10 0 10 20 30 40 50 60x (m)
! "
The car moves to the right between positions ! and ".
!60 !50 !40 !30 !20 !10 0 10 20 30 40 50 60x (m)
$ %
The car moves to the left between positions % and #.
a
!
10 20 30 40 500
!40
!60
!20
0
20
40
60
"t
"x
x (m)
t (s)
"
%
$
&
#
b
Figure 2.1 A car moves back and forth along a straight line. Because we are interested only in the car’s translational motion, we can model it as a particle. Several representations of the information about the motion of the car can be used. Table 2.1 is a tabular representation of the information. (a) A pictorial representation of the motion of the car. (b) A graphical representation (position–time graph) of the motion of the car.
1Figures from Serway & Jewett
-
Position vs. Time Graphs
22 Chapter 2 Motion in One Dimension
obtain reasonably accurate data about its orbit. This approximation is justified because the radius of the Earth’s orbit is large compared with the dimensions of the Earth and the Sun. As an example on a much smaller scale, it is possible to explain the pressure exerted by a gas on the walls of a container by treating the gas molecules as particles, without regard for the internal structure of the molecules.
2.1 Position, Velocity, and SpeedA particle’s position x is the location of the particle with respect to a chosen ref-erence point that we can consider to be the origin of a coordinate system. The motion of a particle is completely known if the particle’s position in space is known at all times. Consider a car moving back and forth along the x axis as in Figure 2.1a. When we begin collecting position data, the car is 30 m to the right of the reference posi-tion x 5 0. We will use the particle model by identifying some point on the car, perhaps the front door handle, as a particle representing the entire car. We start our clock, and once every 10 s we note the car’s position. As you can see from Table 2.1, the car moves to the right (which we have defined as the positive direction) during the first 10 s of motion, from position ! to position ". After ", the position values begin to decrease, suggesting the car is backing up from position " through position #. In fact, at $, 30 s after we start measuring, the car is at the origin of coordinates (see Fig. 2.1a). It continues moving to the left and is more than 50 m to the left of x 5 0 when we stop recording information after our sixth data point. A graphical representation of this information is presented in Figure 2.1b. Such a plot is called a position–time graph. Notice the alternative representations of information that we have used for the motion of the car. Figure 2.1a is a pictorial representation, whereas Figure 2.1b is a graphical representation. Table 2.1 is a tabular representation of the same information. Using an alternative representation is often an excellent strategy for understanding the situation in a given problem. The ultimate goal in many problems is a math-
Position
Position of the Car at Various Times
Position t (s) x (m)
! 0 30" 10 52% 20 38$ 30 0& 40 237# 50 253
Table 2.1
!60 !50 !40 !30 !20 !10 0 10 20 30 40 50 60x (m)
! "
The car moves to the right between positions ! and ".
!60 !50 !40 !30 !20 !10 0 10 20 30 40 50 60x (m)
$ %
The car moves to the left between positions % and #.
a
!
10 20 30 40 500
!40
!60
!20
0
20
40
60
"t
"x
x (m)
t (s)
"
%
$
&
#
b
Figure 2.1 A car moves back and forth along a straight line. Because we are interested only in the car’s translational motion, we can model it as a particle. Several representations of the information about the motion of the car can be used. Table 2.1 is a tabular representation of the information. (a) A pictorial representation of the motion of the car. (b) A graphical representation (position–time graph) of the motion of the car.
1Figures from Serway & Jewett
-
Position vs. Time Graphs
22 Chapter 2 Motion in One Dimension
obtain reasonably accurate data about its orbit. This approximation is justified because the radius of the Earth’s orbit is large compared with the dimensions of the Earth and the Sun. As an example on a much smaller scale, it is possible to explain the pressure exerted by a gas on the walls of a container by treating the gas molecules as particles, without regard for the internal structure of the molecules.
2.1 Position, Velocity, and SpeedA particle’s position x is the location of the particle with respect to a chosen ref-erence point that we can consider to be the origin of a coordinate system. The motion of a particle is completely known if the particle’s position in space is known at all times. Consider a car moving back and forth along the x axis as in Figure 2.1a. When we begin collecting position data, the car is 30 m to the right of the reference posi-tion x 5 0. We will use the particle model by identifying some point on the car, perhaps the front door handle, as a particle representing the entire car. We start our clock, and once every 10 s we note the car’s position. As you can see from Table 2.1, the car moves to the right (which we have defined as the positive direction) during the first 10 s of motion, from position ! to position ". After ", the position values begin to decrease, suggesting the car is backing up from position " through position #. In fact, at $, 30 s after we start measuring, the car is at the origin of coordinates (see Fig. 2.1a). It continues moving to the left and is more than 50 m to the left of x 5 0 when we stop recording information after our sixth data point. A graphical representation of this information is presented in Figure 2.1b. Such a plot is called a position–time graph. Notice the alternative representations of information that we have used for the motion of the car. Figure 2.1a is a pictorial representation, whereas Figure 2.1b is a graphical representation. Table 2.1 is a tabular representation of the same information. Using an alternative representation is often an excellent strategy for understanding the situation in a given problem. The ultimate goal in many problems is a math-
Position
Position of the Car at Various Times
Position t (s) x (m)
! 0 30" 10 52% 20 38$ 30 0& 40 237# 50 253
Table 2.1
!60 !50 !40 !30 !20 !10 0 10 20 30 40 50 60x (m)
! "
The car moves to the right between positions ! and ".
!60 !50 !40 !30 !20 !10 0 10 20 30 40 50 60x (m)
$ %
The car moves to the left between positions % and #.
a
!
10 20 30 40 500
!40
!60
!20
0
20
40
60
"t
"x
x (m)
t (s)
"
%
$
&
#
b
Figure 2.1 A car moves back and forth along a straight line. Because we are interested only in the car’s translational motion, we can model it as a particle. Several representations of the information about the motion of the car can be used. Table 2.1 is a tabular representation of the information. (a) A pictorial representation of the motion of the car. (b) A graphical representation (position–time graph) of the motion of the car.
1Figures from Serway & Jewett
-
Position vs. Time Graphs
22 Chapter 2 Motion in One Dimension
obtain reasonably accurate data about its orbit. This approximation is justified because the radius of the Earth’s orbit is large compared with the dimensions of the Earth and the Sun. As an example on a much smaller scale, it is possible to explain the pressure exerted by a gas on the walls of a container by treating the gas molecules as particles, without regard for the internal structure of the molecules.
2.1 Position, Velocity, and SpeedA particle’s position x is the location of the particle with respect to a chosen ref-erence point that we can consider to be the origin of a coordinate system. The motion of a particle is completely known if the particle’s position in space is known at all times. Consider a car moving back and forth along the x axis as in Figure 2.1a. When we begin collecting position data, the car is 30 m to the right of the reference posi-tion x 5 0. We will use the particle model by identifying some point on the car, perhaps the front door handle, as a particle representing the entire car. We start our clock, and once every 10 s we note the car’s position. As you can see from Table 2.1, the car moves to the right (which we have defined as the positive direction) during the first 10 s of motion, from position ! to position ". After ", the position values begin to decrease, suggesting the car is backing up from position " through position #. In fact, at $, 30 s after we start measuring, the car is at the origin of coordinates (see Fig. 2.1a). It continues moving to the left and is more than 50 m to the left of x 5 0 when we stop recording information after our sixth data point. A graphical representation of this information is presented in Figure 2.1b. Such a plot is called a position–time graph. Notice the alternative representations of information that we have used for the motion of the car. Figure 2.1a is a pictorial representation, whereas Figure 2.1b is a graphical representation. Table 2.1 is a tabular representation of the same information. Using an alternative representation is often an excellent strategy for understanding the situation in a given problem. The ultimate goal in many problems is a math-
Position
Position of the Car at Various Times
Position t (s) x (m)
! 0 30" 10 52% 20 38$ 30 0& 40 237# 50 253
Table 2.1
!60 !50 !40 !30 !20 !10 0 10 20 30 40 50 60x (m)
! "
The car moves to the right between positions ! and ".
!60 !50 !40 !30 !20 !10 0 10 20 30 40 50 60x (m)
$ %
The car moves to the left between positions % and #.
a
!
10 20 30 40 500
!40
!60
!20
0
20
40
60
"t
"x
x (m)
t (s)
"
%
$
&
#
b
Figure 2.1 A car moves back and forth along a straight line. Because we are interested only in the car’s translational motion, we can model it as a particle. Several representations of the information about the motion of the car can be used. Table 2.1 is a tabular representation of the information. (a) A pictorial representation of the motion of the car. (b) A graphical representation (position–time graph) of the motion of the car.
1Figures from Serway & Jewett
-
Position vs. Time Graphs
22 Chapter 2 Motion in One Dimension
obtain reasonably accurate data about its orbit. This approximation is justified because the radius of the Earth’s orbit is large compared with the dimensions of the Earth and the Sun. As an example on a much smaller scale, it is possible to explain the pressure exerted by a gas on the walls of a container by treating the gas molecules as particles, without regard for the internal structure of the molecules.
2.1 Position, Velocity, and SpeedA particle’s position x is the location of the particle with respect to a chosen ref-erence point that we can consider to be the origin of a coordinate system. The motion of a particle is completely known if the particle’s position in space is known at all times. Consider a car moving back and forth along the x axis as in Figure 2.1a. When we begin collecting position data, the car is 30 m to the right of the reference posi-tion x 5 0. We will use the particle model by identifying some point on the car, perhaps the front door handle, as a particle representing the entire car. We start our clock, and once every 10 s we note the car’s position. As you can see from Table 2.1, the car moves to the right (which we have defined as the positive direction) during the first 10 s of motion, from position ! to position ". After ", the position values begin to decrease, suggesting the car is backing up from position " through position #. In fact, at $, 30 s after we start measuring, the car is at the origin of coordinates (see Fig. 2.1a). It continues moving to the left and is more than 50 m to the left of x 5 0 when we stop recording information after our sixth data point. A graphical representation of this information is presented in Figure 2.1b. Such a plot is called a position–time graph. Notice the alternative representations of information that we have used for the motion of the car. Figure 2.1a is a pictorial representation, whereas Figure 2.1b is a graphical representation. Table 2.1 is a tabular representation of the same information. Using an alternative representation is often an excellent strategy for understanding the situation in a given problem. The ultimate goal in many problems is a math-
Position
Position of the Car at Various Times
Position t (s) x (m)
! 0 30" 10 52% 20 38$ 30 0& 40 237# 50 253
Table 2.1
!60 !50 !40 !30 !20 !10 0 10 20 30 40 50 60x (m)
! "
The car moves to the right between positions ! and ".
!60 !50 !40 !30 !20 !10 0 10 20 30 40 50 60x (m)
$ %
The car moves to the left between positions % and #.
a
!
10 20 30 40 500
!40
!60
!20
0
20
40
60
"t
"x
x (m)
t (s)
"
%
$
&
#
b
Figure 2.1 A car moves back and forth along a straight line. Because we are interested only in the car’s translational motion, we can model it as a particle. Several representations of the information about the motion of the car can be used. Table 2.1 is a tabular representation of the information. (a) A pictorial representation of the motion of the car. (b) A graphical representation (position–time graph) of the motion of the car.
1Figures from Serway & Jewett
-
Speed
We need a measure how fast objects move.
speed =distance
time
If an object goes 100 m in 1 second, its speed is 100 m/s.
Speed can change with time.
SI units: meters per second, m/s
-
Speed
We need a measure how fast objects move.
speed =distance
time
If an object goes 100 m in 1 second, its speed is 100 m/s.
Speed can change with time.
SI units: meters per second, m/s
-
Velocity
Driving East at 65 mph is not the same as driving West at 65 mph.
There is a quantity that combines the speed and the direction ofmotion.
This is the velocity.
Velocity is a vector quantity. Speed is a scalar quantity.
If a car drives in a circle, without speeding up or slowing down, isits speed constant?
Is its velocity constant?
-
Velocity
Driving East at 65 mph is not the same as driving West at 65 mph.
There is a quantity that combines the speed and the direction ofmotion.
This is the velocity.
Velocity is a vector quantity. Speed is a scalar quantity.
If a car drives in a circle, without speeding up or slowing down, isits speed constant?
Is its velocity constant?
-
Velocity
Driving East at 65 mph is not the same as driving West at 65 mph.
There is a quantity that combines the speed and the direction ofmotion.
This is the velocity.
Velocity is a vector quantity. Speed is a scalar quantity.
If a car drives in a circle, without speeding up or slowing down, isits speed constant?
Is its velocity constant?
-
Velocity
Driving East at 65 mph is not the same as driving West at 65 mph.
There is a quantity that combines the speed and the direction ofmotion.
This is the velocity.
Velocity is a vector quantity. Speed is a scalar quantity.
If a car drives in a circle, without speeding up or slowing down, isits speed constant?
Is its velocity constant?
-
Velocity
Driving East at 65 mph is not the same as driving West at 65 mph.
There is a quantity that combines the speed and the direction ofmotion.
This is the velocity.
Velocity is a vector quantity. Speed is a scalar quantity.
If a car drives in a circle, without speeding up or slowing down, isits speed constant?
Is its velocity constant?
-
Velocity
QuantitiesHow position changes with time.
(instantaneous) velocity v = dxdt speed and direction
average velocity vavg =∆x∆t
instantaneous speed v or |v| “speedometer speed”
average speed d∆t distance divided by time
Can velocity be negative?
Can speed be negative?
Does average speed always equal average velocity?
-
Velocity
QuantitiesHow position changes with time.
(instantaneous) velocity v = dxdt speed and direction
average velocity vavg =∆x∆t
instantaneous speed v or |v| “speedometer speed”
average speed d∆t distance divided by time
Can velocity be negative?
Can speed be negative?
Does average speed always equal average velocity?
-
Velocity
QuantitiesHow position changes with time.
(instantaneous) velocity v = dxdt speed and direction
average velocity vavg =∆x∆t
instantaneous speed v or |v| “speedometer speed”
average speed d∆t distance divided by time
Can velocity be negative?
Can speed be negative?
Does average speed always equal average velocity?
-
Velocity
QuantitiesHow position changes with time.
(instantaneous) velocity v = dxdt speed and direction
average velocity vavg =∆x∆t
instantaneous speed v or |v| “speedometer speed”
average speed d∆t distance divided by time
Can velocity be negative?
Can speed be negative?
Does average speed always equal average velocity?
-
Position vs. Time Graph (Revisited)
22 Chapter 2 Motion in One Dimension
obtain reasonably accurate data about its orbit. This approximation is justified because the radius of the Earth’s orbit is large compared with the dimensions of the Earth and the Sun. As an example on a much smaller scale, it is possible to explain the pressure exerted by a gas on the walls of a container by treating the gas molecules as particles, without regard for the internal structure of the molecules.
2.1 Position, Velocity, and SpeedA particle’s position x is the location of the particle with respect to a chosen ref-erence point that we can consider to be the origin of a coordinate system. The motion of a particle is completely known if the particle’s position in space is known at all times. Consider a car moving back and forth along the x axis as in Figure 2.1a. When we begin collecting position data, the car is 30 m to the right of the reference posi-tion x 5 0. We will use the particle model by identifying some point on the car, perhaps the front door handle, as a particle representing the entire car. We start our clock, and once every 10 s we note the car’s position. As you can see from Table 2.1, the car moves to the right (which we have defined as the positive direction) during the first 10 s of motion, from position ! to position ". After ", the position values begin to decrease, suggesting the car is backing up from position " through position #. In fact, at $, 30 s after we start measuring, the car is at the origin of coordinates (see Fig. 2.1a). It continues moving to the left and is more than 50 m to the left of x 5 0 when we stop recording information after our sixth data point. A graphical representation of this information is presented in Figure 2.1b. Such a plot is called a position–time graph. Notice the alternative representations of information that we have used for the motion of the car. Figure 2.1a is a pictorial representation, whereas Figure 2.1b is a graphical representation. Table 2.1 is a tabular representation of the same information. Using an alternative representation is often an excellent strategy for understanding the situation in a given problem. The ultimate goal in many problems is a math-
Position
Position of the Car at Various Times
Position t (s) x (m)
! 0 30" 10 52% 20 38$ 30 0& 40 237# 50 253
Table 2.1
!60 !50 !40 !30 !20 !10 0 10 20 30 40 50 60x (m)
! "
The car moves to the right between positions ! and ".
!60 !50 !40 !30 !20 !10 0 10 20 30 40 50 60x (m)
$ %
The car moves to the left between positions % and #.
a
!
10 20 30 40 500
!40
!60
!20
0
20
40
60
"t
"x
x (m)
t (s)
"
%
$
&
#
b
Figure 2.1 A car moves back and forth along a straight line. Because we are interested only in the car’s translational motion, we can model it as a particle. Several representations of the information about the motion of the car can be used. Table 2.1 is a tabular representation of the information. (a) A pictorial representation of the motion of the car. (b) A graphical representation (position–time graph) of the motion of the car.
The average velocity in the interval A→B is the slope of the blueline connecting the points A and B. vavg =
∆x∆t
1Figures from Serway & Jewett
-
Average Velocity, Sample Problem 2.01
You drive a beat-up pickup truck along a straight road for 8.4 kmat 70 km/h, at which point the truck runs out of gasoline andstops. Over the next 30 min, you walk another 2.0 km fartheralong the road to a gas station.
172-1 POSITION, DISPLACEMENT, AND AVERAGE VELOCITY
Calculation: Here we find
(Answer)
To find vavg graphically, first we graph the function x(t) asshown in Fig. 2-5, where the beginning and arrival points onthe graph are the origin and the point labeled as “Station.”Youraverage velocity is the slope of the straight line connectingthose points; that is, vavg is the ratio of the rise (!x " 10.4 km)to the run (!t " 0.62 h), which gives us vavg " 16.8 km/h.
(d) Suppose that to pump the gasoline, pay for it, and walkback to the truck takes you another 45 min. What is youraverage speed from the beginning of your drive to yourreturn to the truck with the gasoline?
KEY IDEA
Your average speed is the ratio of the total distance youmove to the total time interval you take to make that move.
Calculation: The total distance is 8.4 km # 2.0 km # 2.0km " 12.4 km. The total time interval is 0.12 h # 0.50 h #0.75 h " 1.37 h.Thus, Eq. 2-3 gives us
(Answer)savg "12.4 km1.37 h
" 9.1 km/h.
" 16.8 km/h ! 17 km/h.
vavg "!x!t
"10.4 km0.62 h
Sample Problem 2.01 Average velocity, beat-up pickup truck
You drive a beat-up pickup truck along a straight road for8.4 km at 70 km/h, at which point the truck runs out of gaso-line and stops. Over the next 30 min, you walk another2.0 km farther along the road to a gasoline station.
(a) What is your overall displacement from the beginningof your drive to your arrival at the station?
KEY IDEA
Assume, for convenience, that you move in the positive di-rection of an x axis, from a first position of x1 " 0 to a secondposition of x2 at the station. That second position must be at x2 " 8.4 km # 2.0 km " 10.4 km. Then your displacement !xalong the x axis is the second position minus the first position.
Calculation: From Eq. 2-1, we have
!x " x2 $ x1 " 10.4 km $ 0 " 10.4 km. (Answer)
Thus, your overall displacement is 10.4 km in the positivedirection of the x axis.(b) What is the time interval !t from the beginning of yourdrive to your arrival at the station?
KEY IDEA
We already know the walking time interval !twlk (" 0.50 h),but we lack the driving time interval !tdr. However, weknow that for the drive the displacement !xdr is 8.4 km andthe average velocity vavg,dr is 70 km/h. Thus, this averagevelocity is the ratio of the displacement for the drive to thetime interval for the drive.
Calculations: We first write
Rearranging and substituting data then give us
So,(Answer)
(c) What is your average velocity vavg from the beginning ofyour drive to your arrival at the station? Find it both numer-ically and graphically.
KEY IDEA
From Eq. 2-2 we know that vavg for the entire trip is the ratioof the displacement of 10.4 km for the entire trip to the timeinterval of 0.62 h for the entire trip.
" 0.12 h # 0.50 h " 0.62 h. !t " !tdr # !twlk
!tdr "!xdrvavg,dr
"8.4 km
70 km/h" 0.12 h.
vavg,dr "!xdr!tdr
.
Additional examples, video, and practice available at WileyPLUS
Figure 2-5 The lines marked “Driving” and “Walking” are theposition–time plots for the driving and walking stages. (The plotfor the walking stage assumes a constant rate of walking.) Theslope of the straight line joining the origin and the point labeled“Station” is the average velocity for the trip, from the beginningto the station.
Posi
tion
(km
)
Time (h)
00 0.2 0.4 0.6
2
4
6
8
10
12
x
t
Walking
Dri
ving
How far: ∆x = 10.4 km
Station
Driving ends, walking starts.
Slope of this line gives averagevelocity.
How long:∆t = 0.62 h1Halliday, Resnick, Walker, 10th ed, page 17.
-
Question: Average Velocity vs Average Speed
Quick Quiz 2.11 Under which of the following conditions is themagnitude of the average velocity of a particle moving in onedimension smaller than the average speed over some timeinterval?
A A particle moves in the +x direction without reversing.
B A particle moves in the −x direction without reversing.
C A particle moves in the +x direction and then reverses thedirection of its motion.
D There are no conditions for which this is true.
1Serway & Jewett, page 24.
-
Instantaneous Velocity and Position-Time Graphs
26 Chapter 2 Motion in One Dimension
Conceptual Example 2.2 The Velocity of Different Objects
Consider the following one-dimensional motions: (A) a ball thrown directly upward rises to a highest point and falls back into the thrower’s hand; (B) a race car starts from rest and speeds up to 100 m/s; and (C) a spacecraft drifts through space at constant velocity. Are there any points in the motion of these objects at which the instantaneous velocity has the same value as the average velocity over the entire motion? If so, identify the point(s).
represents the velocity of the car at point !. What we have done is determine the instantaneous velocity at that moment. In other words, the instantaneous velocity vx equals the limiting value of the ratio Dx/Dt as Dt approaches zero:1
vx ; limDt S 0
DxDt
(2.4)
In calculus notation, this limit is called the derivative of x with respect to t, written dx/dt:
vx ; limDt S 0
DxDt
5dxdt
(2.5)
The instantaneous velocity can be positive, negative, or zero. When the slope of the position–time graph is positive, such as at any time during the first 10 s in Figure 2.3, vx is positive and the car is moving toward larger values of x. After point ", vx is nega-tive because the slope is negative and the car is moving toward smaller values of x. At point ", the slope and the instantaneous velocity are zero and the car is momen-tarily at rest. From here on, we use the word velocity to designate instantaneous velocity. When we are interested in average velocity, we shall always use the adjective average. The instantaneous speed of a particle is defined as the magnitude of its instan-taneous velocity. As with average speed, instantaneous speed has no direction asso-ciated with it. For example, if one particle has an instantaneous velocity of 125 m/s along a given line and another particle has an instantaneous velocity of 225 m/s along the same line, both have a speed2 of 25 m/s.
Q uick Quiz 2.2 Are members of the highway patrol more interested in (a) your average speed or (b) your instantaneous speed as you drive?
Instantaneous velocity
x (m)
t (s)50403020100
60
20
0
!20
!40
!60
!
#
$
40
"
%
&
60
40
"
!
"""
The blue line between positions ! and " approaches the green tangent line as point " is moved closer to point !.
ba
Figure 2.3 (a) Graph representing the motion of the car in Figure 2.1. (b) An enlargement of the upper-left-hand corner of the graph.
1Notice that the displacement Dx also approaches zero as Dt approaches zero, so the ratio looks like 0/0. While this ratio may appear to be difficult to evaluate, the ratio does have a specific value. As Dx and Dt become smaller and smaller, the ratio Dx/Dt approaches a value equal to the slope of the line tangent to the x -versus-t curve.2As with velocity, we drop the adjective for instantaneous speed. Speed means “instantaneous speed.”
Pitfall Prevention 2.3Instantaneous Speed and Instan-taneous Velocity In Pitfall Pre-vention 2.1, we argued that the magnitude of the average velocity is not the average speed. The mag-nitude of the instantaneous veloc-ity, however, is the instantaneous speed. In an infinitesimal time interval, the magnitude of the dis-placement is equal to the distance traveled by the particle.
Pitfall Prevention 2.2Slopes of Graphs In any graph of physical data, the slope represents the ratio of the change in the quantity represented on the verti-cal axis to the change in the quan-tity represented on the horizontal axis. Remember that a slope has units (unless both axes have the same units). The units of slope in Figures 2.1b and 2.3 are meters per second, the units of velocity.
v = lim∆t→0
x(t + ∆t) − x(t)
t + ∆t − t= lim
∆t→0
∆x∆t
=dx
dt
-
Velocity vs. Time Graphs
34 Chapter 2 Motion in One Dimension
So far, we have evaluated the derivatives of a function by starting with the def-inition of the function and then taking the limit of a specific ratio. If you are familiar with calculus, you should recognize that there are specific rules for taking
Example 2.6 Average and Instantaneous Acceleration
The velocity of a particle moving along the x axis varies according to the expres-sion vx 5 40 2 5t 2, where vx is in meters per second and t is in seconds.
(A) Find the average acceleration in the time interval t 5 0 to t 5 2.0 s.
Think about what the particle is doing from the mathematical representation. Is it moving at t 5 0? In which direction? Does it speed up or slow down? Figure 2.9 is a vx–t graph that was created from the velocity versus time expression given in the problem statement. Because the slope of the entire vx–t curve is negative, we expect the accel-eration to be negative.
S O L U T I O N
Find the velocities at ti 5 t! 5 0 and tf 5 t" 5 2.0 s by substituting these values of t into the expression for the velocity:
vx ! 5 40 2 5t!2 5 40 2 5(0)2 5 140 m/s
vx " 5 40 2 5t"2 5 40 2 5(2.0)2 5 120 m/s
Find the average acceleration in the specified time inter-val Dt 5 t" 2 t! 5 2.0 s:
ax,avg 5vxf 2 vxi
tf 2 ti5
vx " 2 vx !t " 2 t !
520 m/s 2 40 m/s
2.0 s 2 0 s
5 210 m/s2
The negative sign is consistent with our expectations: the average acceleration, represented by the slope of the blue line joining the initial and final points on the velocity–time graph, is negative.
(B) Determine the acceleration at t 5 2.0 s.
S O L U T I O N
Knowing that the initial velocity at any time t is vxi 5 40 2 5t 2, find the velocity at any later time t 1 Dt:
vxf 5 40 2 5(t 1 Dt)2 5 40 2 5t 2 2 10t Dt 2 5(Dt)2
Find the change in velocity over the time interval Dt: Dvx 5 vxf 2 vxi 5 210t Dt 2 5(Dt)2
To find the acceleration at any time t, divide this expression by Dt and take the limit of the result as Dt approaches zero:
ax 5 limDt S 0
DvxDt
5 limDt S 0
1210t 2 5 Dt 2 5 210tSubstitute t 5 2.0 s: ax 5 (210)(2.0) m/s2 5 220 m/s2
Because the velocity of the particle is positive and the acceleration is negative at this instant, the particle is slowing down. Notice that the answers to parts (A) and (B) are different. The average acceleration in part (A) is the slope of the blue line in Figure 2.9 connecting points ! and ". The instantaneous acceleration in part (B) is the slope of the green line tangent to the curve at point ". Notice also that the acceleration is not constant in this example. Situations involv-ing constant acceleration are treated in Section 2.6.
Figure 2.9 (Example 2.6) The velocity–time graph for a particle moving along the x axis according to the expression vx 5 40 2 5t 2.
10
!10
0
0 1 2 3 4
t (s)
vx (m/s)
20
30
40
!20
!30
!
"
The acceleration at " is equal to the slope of the green tangent line at t " 2 s, which is !20 m/s2.
The slope at any point of the velocity-time curve is theacceleration at that time.
-
Acceleration
acceleration a = dvdt =d2xdt2
average acceleration aavg =∆v∆t
Acceleration is also a vector quantity.
If the acceleration vector is pointed in the same direction as thevelocity vector (ie. both are positive or both negative), theparticle’s speed is increasing.
If the acceleration vector is pointed in the opposite direction asthe velocity vector (ie. one is positive the other is negative), theparticle’s speed is decreasing. (It is “decelerating”.)
-
Acceleration
acceleration a = dvdt =d2xdt2
average acceleration aavg =∆v∆t
Acceleration is also a vector quantity.
If the acceleration vector is pointed in the same direction as thevelocity vector (ie. both are positive or both negative), theparticle’s speed is increasing.
If the acceleration vector is pointed in the opposite direction asthe velocity vector (ie. one is positive the other is negative), theparticle’s speed is decreasing. (It is “decelerating”.)
-
Acceleration
acceleration a = dvdt =d2xdt2
average acceleration aavg =∆v∆t
Acceleration is also a vector quantity.
If the acceleration vector is pointed in the same direction as thevelocity vector (ie. both are positive or both negative), theparticle’s speed is increasing.
If the acceleration vector is pointed in the opposite direction asthe velocity vector (ie. one is positive the other is negative), theparticle’s speed is decreasing. (It is “decelerating”.)
-
Acceleration and Velocity-Time Graphs
Acceleration is the slope of a velocity-time curve.
Units: meters per second per second, m/s2
In general, acceleration can be a function of time a(t).
-
Acceleration and Velocity-Time Graphs
Acceleration is the slope of a velocity-time curve.
Units: meters per second per second, m/s2
In general, acceleration can be a function of time a(t).
-
Acceleration Graphs
36 Chapter 2 Motion in One Dimension
In Figure 2.10c, we can tell that the car slows as it moves to the right because its displacement between adjacent images decreases with time. This case suggests the car moves to the right with a negative acceleration. The length of the velocity arrow decreases in time and eventually reaches zero. From this diagram, we see that the acceleration and velocity arrows are not in the same direction. The car is moving with a positive velocity, but with a negative acceleration. (This type of motion is exhib-ited by a car that skids to a stop after its brakes are applied.) The velocity and accel-eration are in opposite directions. In terms of our earlier force discussion, imagine a force pulling on the car opposite to the direction it is moving: it slows down. Each purple acceleration arrow in parts (b) and (c) of Figure 2.10 is the same length. Therefore, these diagrams represent motion of a particle under constant accel-eration. This important analysis model will be discussed in the next section.
Q uick Quiz 2.5 Which one of the following statements is true? (a) If a car is trav-eling eastward, its acceleration must be eastward. (b) If a car is slowing down, its acceleration must be negative. (c) A particle with constant acceleration can never stop and stay stopped.
2.6 Analysis Model: Particle Under Constant Acceleration
If the acceleration of a particle varies in time, its motion can be complex and difficult to analyze. A very common and simple type of one-dimensional motion, however, is that in which the acceleration is constant. In such a case, the average acceleration ax,avg over any time interval is numerically equal to the instantaneous acceleration ax at any instant within the interval, and the velocity changes at the same rate through-out the motion. This situation occurs often enough that we identify it as an analysis model: the particle under constant acceleration. In the discussion that follows, we generate several equations that describe the motion of a particle for this model. If we replace ax,avg by ax in Equation 2.9 and take ti 5 0 and tf to be any later time t, we find that
ax 5vxf 2 vxi
t 2 0
or
vxf 5 vxi 1 axt (for constant ax) (2.13)
This powerful expression enables us to determine an object’s velocity at any time t if we know the object’s initial velocity vxi and its (constant) acceleration ax. A velocity–time graph for this constant-acceleration motion is shown in Figure 2.11b. The graph is a straight line, the slope of which is the acceleration ax; the (constant) slope is consistent with ax 5 dvx/dt being a constant. Notice that the slope is posi-tive, which indicates a positive acceleration. If the acceleration were negative, the slope of the line in Figure 2.11b would be negative. When the acceleration is con-stant, the graph of acceleration versus time (Fig. 2.11c) is a straight line having a slope of zero. Because velocity at constant acceleration varies linearly in time according to Equation 2.13, we can express the average velocity in any time interval as the arith-metic mean of the initial velocity vxi and the final velocity vxf :
vx,avg 5vxi 1 vxf
2 1 for constant ax 2 (2.14)
vx
vxi vxf
tvxi
axt
t
t
Slope ! ax
ax
t
Slope ! 0
x
t
xiSlope ! vxi
t
Slope ! vxf
ax
a
b
c
Figure 2.11 A particle under constant acceleration ax moving along the x axis: (a) the position–time graph, (b) the velocity–time graph, and (c) the acceleration–time graph.
36 Chapter 2 Motion in One Dimension
In Figure 2.10c, we can tell that the car slows as it moves to the right because its displacement between adjacent images decreases with time. This case suggests the car moves to the right with a negative acceleration. The length of the velocity arrow decreases in time and eventually reaches zero. From this diagram, we see that the acceleration and velocity arrows are not in the same direction. The car is moving with a positive velocity, but with a negative acceleration. (This type of motion is exhib-ited by a car that skids to a stop after its brakes are applied.) The velocity and accel-eration are in opposite directions. In terms of our earlier force discussion, imagine a force pulling on the car opposite to the direction it is moving: it slows down. Each purple acceleration arrow in parts (b) and (c) of Figure 2.10 is the same length. Therefore, these diagrams represent motion of a particle under constant accel-eration. This important analysis model will be discussed in the next section.
Q uick Quiz 2.5 Which one of the following statements is true? (a) If a car is trav-eling eastward, its acceleration must be eastward. (b) If a car is slowing down, its acceleration must be negative. (c) A particle with constant acceleration can never stop and stay stopped.
2.6 Analysis Model: Particle Under Constant Acceleration
If the acceleration of a particle varies in time, its motion can be complex and difficult to analyze. A very common and simple type of one-dimensional motion, however, is that in which the acceleration is constant. In such a case, the average acceleration ax,avg over any time interval is numerically equal to the instantaneous acceleration ax at any instant within the interval, and the velocity changes at the same rate through-out the motion. This situation occurs often enough that we identify it as an analysis model: the particle under constant acceleration. In the discussion that follows, we generate several equations that describe the motion of a particle for this model. If we replace ax,avg by ax in Equation 2.9 and take ti 5 0 and tf to be any later time t, we find that
ax 5vxf 2 vxi
t 2 0
or
vxf 5 vxi 1 axt (for constant ax) (2.13)
This powerful expression enables us to determine an object’s velocity at any time t if we know the object’s initial velocity vxi and its (constant) acceleration ax. A velocity–time graph for this constant-acceleration motion is shown in Figure 2.11b. The graph is a straight line, the slope of which is the acceleration ax; the (constant) slope is consistent with ax 5 dvx/dt being a constant. Notice that the slope is posi-tive, which indicates a positive acceleration. If the acceleration were negative, the slope of the line in Figure 2.11b would be negative. When the acceleration is con-stant, the graph of acceleration versus time (Fig. 2.11c) is a straight line having a slope of zero. Because velocity at constant acceleration varies linearly in time according to Equation 2.13, we can express the average velocity in any time interval as the arith-metic mean of the initial velocity vxi and the final velocity vxf :
vx,avg 5vxi 1 vxf
2 1 for constant ax 2 (2.14)
vx
vxi vxf
tvxi
axt
t
t
Slope ! ax
ax
t
Slope ! 0
x
t
xiSlope ! vxi
t
Slope ! vxf
ax
a
b
c
Figure 2.11 A particle under constant acceleration ax moving along the x axis: (a) the position–time graph, (b) the velocity–time graph, and (c) the acceleration–time graph.
36 Chapter 2 Motion in One Dimension
In Figure 2.10c, we can tell that the car slows as it moves to the right because its displacement between adjacent images decreases with time. This case suggests the car moves to the right with a negative acceleration. The length of the velocity arrow decreases in time and eventually reaches zero. From this diagram, we see that the acceleration and velocity arrows are not in the same direction. The car is moving with a positive velocity, but with a negative acceleration. (This type of motion is exhib-ited by a car that skids to a stop after its brakes are applied.) The velocity and accel-eration are in opposite directions. In terms of our earlier force discussion, imagine a force pulling on the car opposite to the direction it is moving: it slows down. Each purple acceleration arrow in parts (b) and (c) of Figure 2.10 is the same length. Therefore, these diagrams represent motion of a particle under constant accel-eration. This important analysis model will be discussed in the next section.
Q uick Quiz 2.5 Which one of the following statements is true? (a) If a car is trav-eling eastward, its acceleration must be eastward. (b) If a car is slowing down, its acceleration must be negative. (c) A particle with constant acceleration can never stop and stay stopped.
2.6 Analysis Model: Particle Under Constant Acceleration
If the acceleration of a particle varies in time, its motion can be complex and difficult to analyze. A very common and simple type of one-dimensional motion, however, is that in which the acceleration is constant. In such a case, the average acceleration ax,avg over any time interval is numerically equal to the instantaneous acceleration ax at any instant within the interval, and the velocity changes at the same rate through-out the motion. This situation occurs often enough that we identify it as an analysis model: the particle under constant acceleration. In the discussion that follows, we generate several equations that describe the motion of a particle for this model. If we replace ax,avg by ax in Equation 2.9 and take ti 5 0 and tf to be any later time t, we find that
ax 5vxf 2 vxi
t 2 0
or
vxf 5 vxi 1 axt (for constant ax) (2.13)
This powerful expression enables us to determine an object’s velocity at any time t if we know the object’s initial velocity vxi and its (constant) acceleration ax. A velocity–time graph for this constant-acceleration motion is shown in Figure 2.11b. The graph is a straight line, the slope of which is the acceleration ax; the (constant) slope is consistent with ax 5 dvx/dt being a constant. Notice that the slope is posi-tive, which indicates a positive acceleration. If the acceleration were negative, the slope of the line in Figure 2.11b would be negative. When the acceleration is con-stant, the graph of acceleration versus time (Fig. 2.11c) is a straight line having a slope of zero. Because velocity at constant acceleration varies linearly in time according to Equation 2.13, we can express the average velocity in any time interval as the arith-metic mean of the initial velocity vxi and the final velocity vxf :
vx,avg 5vxi 1 vxf
2 1 for constant ax 2 (2.14)
vx
vxi vxf
tvxi
axt
t
t
Slope ! ax
ax
t
Slope ! 0
x
t
xiSlope ! vxi
t
Slope ! vxf
ax
a
b
c
Figure 2.11 A particle under constant acceleration ax moving along the x axis: (a) the position–time graph, (b) the velocity–time graph, and (c) the acceleration–time graph.
-
Returning to Velocity vs Time Graphs
The area under a velocity-time graph has a special interpretation:it is the displacement of the object over the time intervalconsidered.
PROBLEMS 49
24. •• IP A tennis player moves back and forth along the base-line while waiting for her opponent to serve, producing theposition-versus-time graph shown in Figure 2–30. (a) Withoutperforming a calculation, indicate on which of the segmentsof the graph, A, B, or C, the player has the greatest speed. Cal-culate the player’s speed for (b) segment A, (c) segment B, and(d) segment C, and show that your results verify your answersto part (a).
O
3
4
2
1
1 2Time, t (s)
Posi
tion,
x (m
)
3 4 5
A
C
B
▲ FIGURE 2–30 Problem 24
33. •• A person on horseback moves according to the velocity-versus-time graph shown in Figure 2–32. Find the displace-ment of the person for each of the following segments of themotion: (a) A, (b) B, and (c) C.
25. ••• On your wedding day you leave for the church 30.0 min-utes before the ceremony is to begin, which should be plenty oftime since the church is only 10.0 miles away. On the way, how-ever, you have to make an unanticipated stop for constructionwork on the road. As a result, your average speed for the first15 minutes is only 5.0 mi/h. What average speed do you needfor the rest of the trip to get you to the church on time?
Section 2–3 Instantaneous Velocity26. •• The position of a particle as a function of time is given by
(a) Plot x versus t for timefrom to (b) Find the average velocity of theparticle from to (c) Find the averagevelocity from to (d) Do you expect theinstantaneous velocity at to be closer to 0.54 m/s,0.56 m/s, or 0.58 m/s? Explain.
27. •• The position of a particle as a function of time is given by(a) Plot x versus t for time
from to . (b) Find the average velocity of theparticle from to (c) Find the averagevelocity from to (d) Do you expect the in-stantaneous velocity at to be closer to
or Explain.
Section 2–4 Acceleration28. • A 747 airliner reaches its takeoff speed of 173 mi/h in 35.2 s.
What is the magnitude of its average acceleration?29. • At the starting gun, a runner accelerates at for 5.2 s.
The runner’s acceleration is zero for the rest of the race. What isthe speed of the runner (a) at and (b) at the end of therace?
30. • A jet makes a landing traveling due east with a speed of115 m/s. If the jet comes to rest in 13.0 s, what is the magnitudeand direction of its average acceleration?
31. • A car is traveling due north at 18.1 m/s. Find the velocity ofthe car after 7.50 s if its acceleration is (a) due north,or (b) due south.
32. •• A motorcycle moves according to the velocity-versus-timegraph shown in Figure 2–31. Find the average acceleration of
1.15 m/s21.30 m/s2
t = 2.0 s,
1.9 m/s2
-1.66 m/s?-1.64 m/s,-1.62 m/s,t = 0.200 s
t = 0.210 s.t = 0.190 st = 0.250 s.t = 0.150 s
t = 1.00 st = 0x = 1-2.00 m/s2t + 13.00 m/s32t3.
t = 0.40 st = 0.41 s.t = 0.39 st = 0.45 s.t = 0.35 s
t = 1.0 s.t = 0x = 12.0 m/s2t + 1-3.0 m/s32t3.
O
15
10
5
5 10Time, t (s)
Velo
city
, v (m
/s)
15 20 25
A
B
C
▲ FIGURE 2–31 Problem 32
O
6
8
4
2
5 10Time, t (s)
Velo
city
, v (m
/s)
15 20 25
A
CB
▲ FIGURE 2–32 Problem 33
34. •• Running with an initial velocity of a horse has anaverage acceleration of How long does it take forthe horse to decrease its velocity to
35. •• IP Assume that the brakes in your car create a constantdeceleration of regardless of how fast you are dri-ving. If you double your driving speed from 16 m/s to 32 m/s,(a) does the time required to come to a stop increase by a fac-tor of two or a factor of four? Explain. Verify your answer topart (a) by calculating the stopping times for initial speeds of(b) 16 m/s and (c) 32 m/s.
36. •• IP In the previous problem, (a) does the distance neededto stop increase by a factor of two or a factor of four? Explain.Verify your answer to part (a) by calculating the stopping dis-tances for initial speeds of (b) 16 m/s and (c) 32 m/s.
37. •• As a train accelerates away from a station, it reaches a speedof 4.7 m/s in 5.0 s. If the train’s acceleration remains constant,what is its speed after an additional 6.0 s has elapsed?
38. •• A particle has an acceleration of for 0.300 s. Atthe end of this time the particle’s velocity is Whatwas the particle’s initial velocity?
Section 2–5 Motion with Constant Acceleration39. • Landing with a speed of 81.9 m/s, and traveling due south, a
jet comes to rest in 949 m. Assuming the jet slows with constantacceleration, find the magnitude and direction of its acceleration.
+9.31 m/s.+6.24 m/s2
4.2 m/s2
+6.5 m/s?-1.81 m/s2.
+11 m/s,
the motorcycle during each of the following segments of themotion: (a) A, (b) B, and (c) C.
WALKMC02_0131536311.QXD 12/9/05 4:12 Page 49
∆x = vavg∆t
-
Area under Velocity vs. Time Graphs
v -t and x-t graphs for the same object:
Area under v -t graph = ∆x .
Figure 2.40 Vertical position, vertical velocity, and vertical acceleration vs. time for a rock thrown vertically up at the edge of a cliff. Notice that velocity changes linearlywith time and that acceleration is constant. Misconception Alert! Notice that the position vs. time graph shows vertical position only. It is easy to get the impression thatthe graph shows some horizontal motion—the shape of the graph looks like the path of a projectile. But this is not the case; the horizontal axis is time, not space. Theactual path of the rock in space is straight up, and straight down.
Discussion
The interpretation of these results is important. At 1.00 s the rock is above its starting point and heading upward, since and are both
positive. At 2.00 s, the rock is still above its starting point, but the negative velocity means it is moving downward. At 3.00 s, both and
are negative, meaning the rock is below its starting point and continuing to move downward. Notice that when the rock is at its highest point (at
1.5 s), its velocity is zero, but its acceleration is still . Its acceleration is for the whole trip—while it is moving up andwhile it is moving down. Note that the values for are the positions (or displacements) of the rock, not the total distances traveled. Finally, note
that free-fall applies to upward motion as well as downward. Both have the same acceleration—the acceleration due to gravity, which remainsconstant the entire time. Astronauts training in the famous Vomit Comet, for example, experience free-fall while arcing up as well as down, as wewill discuss in more detail later.
Making Connections: Take-Home Experiment—Reaction Time
A simple experiment can be done to determine your reaction time. Have a friend hold a ruler between your thumb and index finger, separated byabout 1 cm. Note the mark on the ruler that is right between your fingers. Have your friend drop the ruler unexpectedly, and try to catch itbetween your two fingers. Note the new reading on the ruler. Assuming acceleration is that due to gravity, calculate your reaction time. How farwould you travel in a car (moving at 30 m/s) if the time it took your foot to go from the gas pedal to the brake was twice this reaction time?
CHAPTER 2 | KINEMATICS 65
Slope of x-t curve = v .
Figure 2.40 Vertical position, vertical velocity, and vertical acceleration vs. time for a rock thrown vertically up at the edge of a cliff. Notice that velocity changes linearlywith time and that acceleration is constant. Misconception Alert! Notice that the position vs. time graph shows vertical position only. It is easy to get the impression thatthe graph shows some horizontal motion—the shape of the graph looks like the path of a projectile. But this is not the case; the horizontal axis is time, not space. Theactual path of the rock in space is straight up, and straight down.
Discussion
The interpretation of these results is important. At 1.00 s the rock is above its starting point and heading upward, since and are both
positive. At 2.00 s, the rock is still above its starting point, but the negative velocity means it is moving downward. At 3.00 s, both and
are negative, meaning the rock is below its starting point and continuing to move downward. Notice that when the rock is at its highest point (at
1.5 s), its velocity is zero, but its acceleration is still . Its acceleration is for the whole trip—while it is moving up andwhile it is moving down. Note that the values for are the positions (or displacements) of the rock, not the total distances traveled. Finally, note
that free-fall applies to upward motion as well as downward. Both have the same acceleration—the acceleration due to gravity, which remainsconstant the entire time. Astronauts training in the famous Vomit Comet, for example, experience free-fall while arcing up as well as down, as wewill discuss in more detail later.
Making Connections: Take-Home Experiment—Reaction Time
A simple experiment can be done to determine your reaction time. Have a friend hold a ruler between your thumb and index finger, separated byabout 1 cm. Note the mark on the ruler that is right between your fingers. Have your friend drop the ruler unexpectedly, and try to catch itbetween your two fingers. Note the new reading on the ruler. Assuming acceleration is that due to gravity, calculate your reaction time. How farwould you travel in a car (moving at 30 m/s) if the time it took your foot to go from the gas pedal to the brake was twice this reaction time?
CHAPTER 2 | KINEMATICS 65
-
Velocity vs. Time Graphs44 Chapter 2 Motion in One Dimension
under the curve in the velocity–time graph. Therefore, in the limit n S ,̀ or Dtn S 0, the displacement is
Dx 5 limDtn S 0an vxn,avg Dtn (2.18)
If we know the vx–t graph for motion along a straight line, we can obtain the dis-placement during any time interval by measuring the area under the curve corre-sponding to that time interval. The limit of the sum shown in Equation 2.18 is called a definite integral and is written
limDtn S 0an vxn,avg Dtn 5 3
tf
ti
vx 1 t 2 dt (2.19)where vx(t) denotes the velocity at any time t. If the explicit functional form of vx(t) is known and the limits are given, the integral can be evaluated. Sometimes the vx–t graph for a moving particle has a shape much simpler than that shown in Fig-ure 2.15. For example, suppose an object is described with the particle under con-stant velocity model. In this case, the vx–t graph is a horizontal line as in Figure 2.16 and the displacement of the particle during the time interval Dt is simply the area of the shaded rectangle:
Dx 5 vxi Dt (when vx 5 vxi 5 constant)
Kinematic EquationsWe now use the defining equations for acceleration and velocity to derive two of our kinematic equations, Equations 2.13 and 2.16. The defining equation for acceleration (Eq. 2.10),
ax 5dvxdt
may be written as dvx 5 ax dt or, in terms of an integral (or antiderivative), as
vxf 2 vxi 5 3t
0 ax dt
For the special case in which the acceleration is constant, ax can be removed from the integral to give
vxf 2 vxi 5 ax 3t
0 dt 5 ax 1 t 2 0 2 5 axt (2.20)
which is Equation 2.13 in the particle under constant acceleration model. Now let us consider the defining equation for velocity (Eq. 2.5):
vx 5dxdt
Definite integral
Figure 2.16 The velocity–time curve for a particle moving with constant velocity vxi. The displace-ment of the particle during the time interval tf 2 ti is equal to the area of the shaded rectangle.
vx ! vxi ! constant
tf
vxi
t
"t
ti
vx
vxi
vx
t
"t n
t i t f
vxn,avg
The area of the shaded rectangle is equal to the displacement in the time interval "tn.
Figure 2.15 Velocity versus time for a particle moving along the x axis. The total area under the curve is the total displacement of the particle.
∆x = lim∆t→0
∑n
vn ∆t =
∫ tfti
v dt
where ∆x represents the change in position (displacement) in thetime interval ti to tf .
-
Velocity vs. Time Graphs44 Chapter 2 Motion in One Dimension
under the curve in the velocity–time graph. Therefore, in the limit n S ,̀ or Dtn S 0, the displacement is
Dx 5 limDtn S 0an vxn,avg Dtn (2.18)
If we know the vx–t graph for motion along a straight line, we can obtain the dis-placement during any time interval by measuring the area under the curve corre-sponding to that time interval. The limit of the sum shown in Equation 2.18 is called a definite integral and is written
limDtn S 0an vxn,avg Dtn 5 3
tf
ti
vx 1 t 2 dt (2.19)where vx(t) denotes the velocity at any time t. If the explicit functional form of vx(t) is known and the limits are given, the integral can be evaluated. Sometimes the vx–t graph for a moving particle has a shape much simpler than that shown in Fig-ure 2.15. For example, suppose an object is described with the particle under con-stant velocity model. In this case, the vx–t graph is a horizontal line as in Figure 2.16 and the displacement of the particle during the time interval Dt is simply the area of the shaded rectangle:
Dx 5 vxi Dt (when vx 5 vxi 5 constant)
Kinematic EquationsWe now use the defining equations for acceleration and velocity to derive two of our kinematic equations, Equations 2.13 and 2.16. The defining equation for acceleration (Eq. 2.10),
ax 5dvxdt
may be written as dvx 5 ax dt or, in terms of an integral (or antiderivative), as
vxf 2 vxi 5 3t
0 ax dt
For the special case in which the acceleration is constant, ax can be removed from the integral to give
vxf 2 vxi 5 ax 3t
0 dt 5 ax 1 t 2 0 2 5 axt (2.20)
which is Equation 2.13 in the particle under constant acceleration model. Now let us consider the defining equation for velocity (Eq. 2.5):
vx 5dxdt
Definite integral
Figure 2.16 The velocity–time curve for a particle moving with constant velocity vxi. The displace-ment of the particle during the time interval tf 2 ti is equal to the area of the shaded rectangle.
vx ! vxi ! constant
tf
vxi
t
"t
ti
vx
vxi
vx
t
"t n
t i t f
vxn,avg
The area of the shaded rectangle is equal to the displacement in the time interval "tn.
Figure 2.15 Velocity versus time for a particle moving along the x axis. The total area under the curve is the total displacement of the particle.
Or we can write
x(t) =
∫ tti
v dt ′
if the object starts at position x = 0 when t = ti .
-
Question
What does the area under an acceleration-time graph represent?
-
Matching Velocity to Acceleration Graphs
38 Chapter 2 Motion in One Dimension
Q uick Quiz 2.6 In Figure 2.12, match each vx–t graph on the top with the ax–t graph on the bottom that best describes the motion.
Example 2.7 Carrier Landing
A jet lands on an aircraft carrier at a speed of 140 mi/h (< 63 m/s).
(A) What is its acceleration (assumed constant) if it stops in 2.0 s due to an arresting cable that snags the jet and brings it to a stop?
You might have seen movies or television shows in which a jet lands on an aircraft carrier and is brought to rest sur-prisingly fast by an arresting cable. A careful reading of the problem reveals that in addition to being given the initial speed of 63 m/s, we also know that the final speed is zero. Because the acceleration of the jet is assumed constant, we model it as a particle under constant acceleration. We define our x axis as the direction of motion of the jet. Notice that we have no information about the change in position of the jet while it is slowing down.
AM
S O L U T I O N
Analysis Model Particle Under Constant AccelerationExamples
along a straight freeway
resistance (Section 2.7)
acts (Chapter 5)
field (Chapter 23)
Imagine a moving object that can be modeled as a particle. If it begins from position xi and initial velocity vxi and moves in a straight line with a constant acceleration ax, its subsequent position and velocity are described by the following kinematic equations:
vxf 5 vxi 1 axt (2.13)
vx,avg 5vxi 1 vxf
2 (2.14)
xf 5 xi 112 1vxi 1 vxf 2 t (2.15)
xf 5 xi 1 vxit 112axt
2 (2.16)
vxf2 5 vxi21 2ax(xf 2 xi) (2.17)v
a
t
vx
t
ax
t
vx
t
ax
t
vx
t
ax
a b c
d e f
Figure 2.12 (Quick Quiz 2.6) Parts (a), (b), and (c) are vx–t graphs of objects in one-dimensional motion. The possible accelerations of each object as a function of time are shown in scrambled order in (d), (e), and (f).
-
Summary
• kinematic quantities• interpreting graphs of kinematic quantities
Quiz Start of class tomorrow (Thursday, Sept 27).
Homework• Ch 2 Questions: 3; Problems: 1, 3, 7, 13• Graphs: look at and understand figure 2-6, page 19.