Mechanical Systems and Signal Processing · Ambient vibration Vector Autoregressive model...
14
Identifying damage locations under ambient vibrations utilizing vector autoregressive models and Mahalanobis distances A.A. Mosavi a,n , D. Dickey b , R. Seracino a , S. Rizkalla a a Department of Civil, Construction and Environmental Engineering, North Carolina State University, Raleigh, NC 27695-7908, USA b Department of Statistics, North Carolina State University, Raleigh, NC 27695-8203, USA article info Article history: Received 14 November 2010 Received in revised form 28 May 2011 Accepted 5 June 2011 Keywords: Damage location Ambient vibration Vector Autoregressive model Statistical pattern recognition Bridges Structural health monitoring abstract This paper presents a study for identifying damage locations in an idealized steel bridge girder using the ambient vibration measurements. A sensitive damage feature is proposed in the context of statistical pattern recognition to address the damage detection problem. The study utilizes an experimental program that consists of a two-span continuous steel beam subjected to ambient vibrations. The vibration responses of the beam are measured along its length under simulated ambient vibrations and different healthy/damage conditions of the beam. The ambient vibration is simulated using a hydraulic actuator, and damages are induced by cutting portions of the flange at two locations. Multivariate vector autoregressive models were fitted to the vibration response time histories measured at the multiple sensor locations. A sensitive damage feature is proposed for identifying the damage location by applying Mahalanobis distances to the coefficients of the vector autoregressive models. A linear discriminant criterion was used to evaluate the amount of variations in the damage features obtained for different sensor locations with respect to the healthy condition of the beam. The analyses indicate that the highest variations in the damage features were coincident with the sensors closely located to the damages. The presented method showed a promising sensitivity to identify the damage location even when the induced damage was very small. & 2011 Elsevier Ltd. All rights reserved. 1. Introduction Vibration-based damage detection methods have received significant attention during the past decade as an effective approach for structural health monitoring of bridges and other civil engineering infrastructure. Most of these vibration- based damage detection methods are based on some modal parameters. A detailed review of these studies has been reported by Doebling et al. [1]. While most of the studies for detecting damages in the structure have been only based on modal frequency variations, others have used modal shape related indices [2], dynamically measured flexibility [3], and FEM model updating [4] for locating damage in the structure. Although these methods have shown promise, problems such as low sensitivity of damage features to local damages, high statistical uncertainty of the derived parameters, computational difficulties and model uncertainties for complex structures are major hindrances in developing practical damage detection methods for health monitoring of bridges. Some of these problems are reported by Farrar et al. [5,6] in a Contents lists available at ScienceDirect journal homepage: www.elsevier.com/locate/jnlabr/ymssp Mechanical Systems and Signal Processing 0888-3270/$ - see front matter & 2011 Elsevier Ltd. All rights reserved. doi:10.1016/j.ymssp.2011.06.009 n Corresponding author. Present Address: SC Solutions Inc., 1261 Oakmead Pkwy, Sunnyvale, CA, USA. Tel.: þ1 408 617 4552; fax: þ1 408 617 4521. E-mail address: [email protected] (A.A. Mosavi). Mechanical Systems and Signal Processing ] (]]]]) ]]]–]]] Please cite this article as: A.A. Mosavi, et al., Identifying damage locations under ambient vibrations utilizing vector autoregressive models and..., Mechanical Systems and Signal Processing (2011), doi:10.1016/j.ymssp.2011.06.009
Transcript of Mechanical Systems and Signal Processing · Ambient vibration Vector Autoregressive model...

Contents lists available at ScienceDirect
Mechanical Systems and Signal Processing
Mechanical Systems and Signal Processing ] (]]]]) ]]]–]]]
0888-32
doi:10.1
n Corr
E-m
Pleasauto
journal homepage: www.elsevier.com/locate/jnlabr/ymssp
Identifying damage locations under ambient vibrations utilizingvector autoregressive models and Mahalanobis distances
A.A. Mosavi a,n, D. Dickey b, R. Seracino a, S. Rizkalla a
a Department of Civil, Construction and Environmental Engineering, North Carolina State University, Raleigh, NC 27695-7908, USAb Department of Statistics, North Carolina State University, Raleigh, NC 27695-8203, USA
a r t i c l e i n f o
Article history:
Received 14 November 2010
Received in revised form
28 May 2011
Accepted 5 June 2011
Keywords:
Damage location
Ambient vibration
Vector Autoregressive model
Statistical pattern recognition
Bridges
Structural health monitoring
70/$ - see front matter & 2011 Elsevier Ltd. A
016/j.ymssp.2011.06.009
esponding author. Present Address: SC Solut
ail address: [email protected] (A.A. M
e cite this article as: A.A. Mosavi, eregressive models and..., Mechanical
a b s t r a c t
This paper presents a study for identifying damage locations in an idealized steel bridge
girder using the ambient vibration measurements. A sensitive damage feature is proposed in
the context of statistical pattern recognition to address the damage detection problem. The
study utilizes an experimental program that consists of a two-span continuous steel beam
subjected to ambient vibrations. The vibration responses of the beam are measured along its
length under simulated ambient vibrations and different healthy/damage conditions of the
beam. The ambient vibration is simulated using a hydraulic actuator, and damages are
induced by cutting portions of the flange at two locations. Multivariate vector autoregressive
models were fitted to the vibration response time histories measured at the multiple sensor
locations. A sensitive damage feature is proposed for identifying the damage location by
applying Mahalanobis distances to the coefficients of the vector autoregressive models.
A linear discriminant criterion was used to evaluate the amount of variations in the damage
features obtained for different sensor locations with respect to the healthy condition of the
beam. The analyses indicate that the highest variations in the damage features were
coincident with the sensors closely located to the damages. The presented method showed
a promising sensitivity to identify the damage location even when the induced damage was
very small.
& 2011 Elsevier Ltd. All rights reserved.
1. Introduction
Vibration-based damage detection methods have received significant attention during the past decade as an effectiveapproach for structural health monitoring of bridges and other civil engineering infrastructure. Most of these vibration-based damage detection methods are based on some modal parameters. A detailed review of these studies has beenreported by Doebling et al. [1]. While most of the studies for detecting damages in the structure have been only based onmodal frequency variations, others have used modal shape related indices [2], dynamically measured flexibility [3], andFEM model updating [4] for locating damage in the structure. Although these methods have shown promise, problemssuch as low sensitivity of damage features to local damages, high statistical uncertainty of the derived parameters,computational difficulties and model uncertainties for complex structures are major hindrances in developing practicaldamage detection methods for health monitoring of bridges. Some of these problems are reported by Farrar et al. [5,6] in a
ll rights reserved.
ions Inc., 1261 Oakmead Pkwy, Sunnyvale, CA, USA. Tel.: þ1 408 617 4552; fax: þ1 408 617 4521.
osavi).
t al., Identifying damage locations under ambient vibrations utilizing vectorSystems and Signal Processing (2011), doi:10.1016/j.ymssp.2011.06.009

A.A. Mosavi et al. / Mechanical Systems and Signal Processing ] (]]]]) ]]]–]]]2
comparative study of different modal based damage detection methods. These problems are magnified especially when thesource of excitation for continuous monitoring of bridges are ambient vibrations induced by wind or traffic loading.
In search for more reliable damage detection methods, time series models have been utilized to extract more sensitivedamage features. Sohn et al. [7] used Auto Regressive (AR) model coefficients as sensitive damage features to discriminatebetween the undamaged and damaged condition of a bridge column. Carden and Brownjohn [8] used AutoregressiveMoving Average (ARMA) model coefficients to feed to a classifier in order to distinguish between different conditions ofthe structure. However, it is reported that ARMA models cannot be reliably used to provide spatial information about thedetected damages [9,10]. In order to obtain spatial information about the damage in continuous structures such as bridgegirders, a multivariate model that incorporates the response of the structure at multiple locations is required. In thisregard, fitting Vector Auto Regressive Moving Average models (VARMA) to vibration responses of the structure at multiplelocations can provide spatial information about vibration characteristics of the structure. Hence, VARMA models canpotentially be used to derive sensitive damage features for identifying damage locations. Few researchers have usedVARMA models for locating damage in structures. Bodeux and Golinval [11] fitted VARMA models to the vibrationresponses of a Steel Quake Benchmark structure in order to distinguish between the damaged and undamaged condition ofthe structure using the natural frequencies derived from the VARMA models. Heyns [12] and De Stefano et al. [13] derivedmodal shapes and curvatures from the fitted VARMA models in order to locate damage in structures. However, modalproperties do not usually have sufficient sensitivity to locate damage in structures as discussed earlier.
This paper presents results of a comprehensive study to develop sensitive damage features that locate damage incontinuous structures such as bridge girders under ambient vibrations. The study investigates locating the damage in thecontext of a pattern recognition problem. Multivariate VAR models were used to predict the acceleration time historiesrecorded from multiple locations on the structure. Mahalanobis distances [14] were used to extract damage features fordifferent sensor locations by measuring the amount of variations in the coefficients of VAR models obtained for a referencecondition of the structure and those obtained for an unknown condition of the structure. Finally, the Fisher criterion [15]was used to statistically measure the amount of variations in the damage features with respect to the reference conditionof the structure. The sensor location which is associated with the largest amount of variation could be identified as thedamage location. In order to validate the methodology, a continuous two span steel beam was tested using a hydraulicactuator to simulate ambient vibrations. Many researchers have successfully simulated the sources of ambient vibrationssuch as wind or traffic loadings as random white noise processes [16–18]. According to the findings by these researchers,the ambient vibrations were simulated by applying random loadings on the beam. The vibration response of the beam wasmeasured using 15 accelerometers at multiple locations along the beam. The damage was simulated in the beam bycutting portions of the bottom flange of the beam at different locations. The damage features were calculated from themeasured vibration time histories. Research findings indicate that the highest values of damage features correspond tosensors located close to the physical damage locations.
2. Damage localization procedure
2.1. Overview of the VARMA models
The vector autoregressive moving average model is called VARMA(p,q). The form of the model can be written as
yt ¼Xp
i ¼ 1
Fiyt�iþXq
j ¼ 1
Yjet�jþet ð1Þ
where yt ¼ ðy1t ,y2t ,. . .,yntÞT is referred to as the vector of dependent response variables, and et ¼ ðe1t ,e2t ,. . .,entÞ
T is the vectorwhite noise process. Here p and q represent orders of the autoregressive and moving average parts of the VARMA model,respectively, and n represents the number of dependent response variables used in estimating the VARMA model. In thisstudy, n will be the number of sensor locations where vibration time history responses have been measured along thebeam. The simple interpretation of this model is that the response variables, which are acceleration responses at differentlocations, are not only contemporaneously correlated to each other; they are also correlated to each other’s past values.
The model coefficients in Eq. (1), Fi and Yj, include information about physical properties of the structure. The Fi
coefficients define the AR function of order p, and can be used to determine the natural frequencies, mode shapes anddamping ratios while Yj coefficients define the MA function of order q and include information about power of theresponse in different modes [9]. Therefore, if only modal properties of the structure are required, the vibration responsecan be modeled by just the AR part of the model besides which, all ARMA models can be written as possibly infinite orderAR models; however, in practice they may be modeled adequately by a finite order series [19]. There are several differentcriteria that can be checked to determine the required order of the AR model. The Akaike information criterion (AIC) [20]and Schwarz’s Bayesian criterion (SBC) [21] are among those. These criteria may suggest AR models of different orders;hence a simpler approach has been taken in this study. The order of the AR model has been determined by checking therandomness and Gaussianity of the prediction errors through trial and error.
The VAR model coefficients, Fi, are estimated with a linear least squares regression using the SAS statistical package [22]. Foreach set of acceleration time histories, p matrices will be obtained as components of F¼ ðF1,F2,. . .,Fi,. . .FpÞ where Fi
Please cite this article as: A.A. Mosavi, et al., Identifying damage locations under ambient vibrations utilizing vectorautoregressive models and..., Mechanical Systems and Signal Processing (2011), doi:10.1016/j.ymssp.2011.06.009

A.A. Mosavi et al. / Mechanical Systems and Signal Processing ] (]]]]) ]]]–]]] 3
corresponds to the following n�n matrix
Fi ¼
f11,i f12,i � � � f1n,i
f21,i f22,i � � � f2n,i
^ ^ & ^
fn1,i fn2,i � � � fnn,i
266664
377775
ð2Þ
The VAR coefficients are also directly related to the mode shape and modal frequencies of the structure. The relationbetween these coefficients and the modal parameters can be explained by [23,24]
0 I 0 U 0
0 0 I U 0
U U U U U
0 0 0 U I
Fp Fp�1 Fp�2 U F1
26666664
37777775¼CmC�1
ð3Þ
where
m¼ diagfmig, C¼
c1 U U cm
m1c1 U U mnpcm
U U U U
mp�11 c1 U U mp�1
np cm
266664
377775
ð4Þ
mi and ci represent the eigenvalues and the mode shapes, respectively, and m is equal to the np, number of poles if astructure is excited by truly random Gaussian distributed noise and no noise is present in the measurement [9].
2.2. Proposed diagnosis scheme
This damage diagnosis approach is proposed in 4 steps. During these four steps, the vibration responses of the structureobtained at its healthy and damaged conditions will be indirectly compared to each other by extracting sensitive damagefeatures. The damage features will be obtained by application of VAR models to the measured vibration response of thestructure at healthy and damage conditions, and measuring the deviations that occur in the estimated coefficients of theVAR models due to damages. Finally, the magnitudes of deviations in the damage features are statistically measured withrespect to the healthy condition of the structure. Coefficients of the VAR model include spatial information about thevibration, and the amount of deviation observed at different sensor locations will potentially reveal information about thelocation of damage in the structure. The details are discussed in the following four steps:
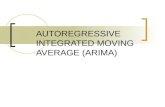
Step 1—Data sample formation: The first step in this damage diagnosis scheme is dividing the recorded vibration historyat different conditions of the structure into smaller data samples. This allows having a number of different VAR modelsrepresenting the vibration response of the structure in the smaller data samples rather than fitting one single VARmodel to the entire recorded vibration time history. The effect of uncertainty in predicting the parameters of VARmodels will be indirectly included in the damage diagnosis scheme by conducting this step. Also, conducting this stepwill enable generation of a statistical distribution for the extracted damage features as discussed later.This step begins by dividing the recorded vibration history of the structure at its intact condition into two smaller datasets. In this study, the first half of the undamaged data set was taken as the reference data set, SetR, and the second halfof the undamaged data set was taken as the Healthy data set, SetH. SetR will be used for all future comparisons inextracting damage features, and SetH will be used to extract damage features for the healthy condition of the structure.The term ‘‘damage feature’’ here refers to extracted features whether from damaged beams or not. Similarly, the secondhalf of the recorded vibration time histories from different damaged conditions of the structure were taken as thedamage data set, SetD, and used to extract damage features for the corresponding condition of the structure. Allgenerated data sets were segmented into smaller data samples. Each data sample was a matrix, consisting of multipletime histories for different sensors at different locations.Step 2—Data reduction: The second step in this proposed damage diagnosis scheme consists of estimating theparameters of the VAR models for each data sample generated from the Reference (SetR), Healthy (SetH) or Damaged(SetD) data sets. The matrix coefficients for the obtained VAR models, in particular diagonal terms jjj,1 and jjj,2 frommatrices F1, and F2 in Eq. (2), were used to extract damage features for sensor location j at different conditions of thestructure. There were two reasons for selecting these terms. First, other terms in the coefficient matrix F1, and F2
include mixed information about sensor locations. They do not capture vibration changes at a single sensor location. Forexample, jij,1 represents correlation between sensor locations i and j. Second, coefficients for recent time lags like F1,and F2 are the most informative about different modes of vibration [9]. The jjj,1 and jjj,2 terms, calculated fromdifferent data samples in SetR, SetH and SetD data sets, were plotted against each other. The number of data points
Please cite this article as: A.A. Mosavi, et al., Identifying damage locations under ambient vibrations utilizing vectorautoregressive models and..., Mechanical Systems and Signal Processing (2011), doi:10.1016/j.ymssp.2011.06.009

-2
-1.6
-1.2
-0.8
-0.4
0
1 1.2 1.4 1.6 1.8 2 2.2
Reference
Healthy
Damage-1Damage-2
�jj,1
�jj
,2
Fig. 1. Plot of the selected VAR parameters for sensor j at different structural conditions.
A.A. Mosavi et al. / Mechanical Systems and Signal Processing ] (]]]]) ]]]–]]]4
representing each condition of the structure is equal to the number of segments in the recorded vibration data in thecorresponding condition. A typical plot of these parameters is shown in Fig. 1.Step 3—Damage feature extraction: A statistical measure called Mahalanobis distance was used to extract the damagefeatures. This statistical measure was used to recognize the variation patterns in the selected terms of the VAR modelsby measuring the distance between the selected terms corresponding to a condition of interest and those correspond-ing to the reference condition of the structure. The Mahalanobis distance of a multivariate potential outlier vectorx¼ ðx1,x2,. . .,xNÞ
T from a group with mean m and covariance matrix S will be
DMðxÞ ¼
ffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiðx�mÞT S�1ðx�mÞ
qð5Þ
The Mahalanobis distance is schematically explained in Fig. 1. The arrows in Fig. 1 stand for ordinary (Euclidean)distances between two points in two different groups of data. On the other hand, elliptical contours in Fig. 1 showMahalanobis distances of same probability surrounding a mean for a bivariate normal population. It can be seen in thisfigure that arrows are pointing to three different data points with similar Mahalanobis distances while Euclideandistances to these three data points are completely different. These differences arise from the effect of covariances onMahalanobis distances.As a result of this step, damage features (Mahalanobis distances) will be obtained for each condition of the structure atevery sensor location. The number of damage features will be equal to the number of the segmented data samples ineach of the SetH and SetD data sets.Step 4—Statistical evaluation: In this step, a statistical evaluation will be conducted on the calculated damage features inorder to identify damage location in the structure. This evaluation will be performed by comparison between thedamage features calculated for the healthy and the damage condition of interest for each individual sensor location.Both the mean and the variance values of the damage features should be considered. A statistical measure called theFisher criterion was used to determine the actual deviation of damage features under the damage condition versusthose for the healthy condition of interest. The Fisher criterion is
f ¼ðmD�mhÞ
2
s2Dþs2
h
ð6Þ
where mh and mD correspond to the mean values of damage features for the healthy and damage condition, and sD and sh
represent the standard deviations of those distance vectors. The analogy that the Fisher criterion would be largest for thesensor closest to the physical damage location was used to identify that location. The selected terms of the fitted VAR modelsshould experience the most extreme deviations at the sensor located closest to the physical damage location since thesecoefficients are directly related to the modal properties according to Eqs. (3) and (4). A local reduction in the stiffness of thebeam will result in a change in the mode shape or mode shape curvatures close to the damage location. Mahalanobis distancescapture these deviations in the fitted VAR model coefficients, and finally the Fisher criterion quantifies the magnitude of thecalculated Mahalanobis distances or the variations in the VAR coefficients. Therefore, a large Fisher Criterion for a specificsensor location means that there is a local change in the mode shape properties of the beam close to that sensor.
3. Experimental study
3.1. Description of the test structure and data acquisition
An experimental study was performed to investigate the ability of the proposed algorithm for locating damages. Thetest structure was selected to idealize a steel bridge girder. A simply supported two-span continuous W4�13 steel rolledsection was used as the test structure. One of the supports was a pin support while the other two supports were rollers.
Please cite this article as: A.A. Mosavi, et al., Identifying damage locations under ambient vibrations utilizing vectorautoregressive models and..., Mechanical Systems and Signal Processing (2011), doi:10.1016/j.ymssp.2011.06.009

A.A. Mosavi et al. / Mechanical Systems and Signal Processing ] (]]]]) ]]]–]]] 5
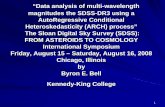
Each span of the beam was 5.49 m long. In order to simulate the ambient vibration on the beam, a hydraulic actuator wasused to apply loading parallel to the web of the beam at 1.53 m from the left support of the beam. The steel framesupporting the actuator was pre-stressed to the lab strong floor. The tested beam and hydraulic actuator set-up are shownin Fig. 2.
The beam was instrumented with fifteen accelerometers to measure the vibration response of the beam along the twospans. All accelerometers had a sensitivity of 100 mV/g. Nine accelerometers were used in the left span and sixaccelerometers were used in the other span as shown in Fig. 3. The numbers for the sensor locations in Fig. 3 are usedfor future references in this paper. Locations of the sensors were selected to avoid the stationary nodes of majorvibration modes.
The damage conditions were simulated by saw cutting portions of the bottom flange of the beam with different sizecuts at locations 1 and 2 shown in Figs. 3, 4(a) and (b). Five different levels of damage were considered at the 1st damagelocation, and 4 different levels of damage were considered for damages at the 2nd damage location. The cuts at the 1stdamage location were of minimal width in the longitudinal direction of the beam while the cuts at the 2nd damagelocation were 100 mm wide. The notches at the 2nd damage location were cut when the damage at the 1st damagelocation was already at its maximum level. Reductions in the cross-sectional properties of the beam due to the cuts arepresented in Table 1.
The hydraulic actuator was utilized to apply random loadings on the beam. Three different sets of generated whitenoise signals were used as the input command of the actuator. The actuator was used in an open-loop manner whileattempting to excite the vibration response in the range of 0–500 Hz. It should be noted that the feedback signal did nothave uniform power over the specified range of frequency due to the system limitations, dynamics of the beam and
Fig. 2. Beam and actuator set-up.
549549
72 26 35 99 108 107 10272 61 58 33 31 90 27 34 85 58
6161
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15
153
Actuator
1st
and 2nd
damage locations
Accelerometers1
st 2nd
Fig. 3. Details of sensor placement, actuator and damage locations (in cm).
Please cite this article as: A.A. Mosavi, et al., Identifying damage locations under ambient vibrations utilizing vectorautoregressive models and..., Mechanical Systems and Signal Processing (2011), doi:10.1016/j.ymssp.2011.06.009

6 6
D11
13 13
D12
25 25
D13
48 48
D14
102
D15
20 20
D23
10 10
D21
15 15
D22
102
1056
10
35 35
D24
Fig. 4. Extent of cuts in cross-section at (a) 1st and (b) 2nd damage locations (in mm).
Table 1Percent changes in cross-sectional properties of the beam due to different damage conditions.
% reduction in Damage conditions
D11 D12 D13 D14 D15 D21 D22 D23 D24
Area 4.9 9.8 19.6 36.7 39.2 7.3 3.4 15.7 26.9
Moment of inertia 5.4 12.2 28.3 68.4 76.0 8.7 15.2 21.4 43.2
300
1100
1900
2700
10 60 110 160 210 260 310
Time (s)
Loa
d (N
)
Fig. 5. First set of applied random loading.
Table 2Average and standard deviation values of the three applied force signals.
1st signal 2nd signal 3rd signal
Mean (N) 1567.3 1782.6 1560.4
Standard deviation 280.9 278.9 282.0
A.A. Mosavi et al. / Mechanical Systems and Signal Processing ] (]]]]) ]]]–]]]6
supporting frame. The loading time history for the first set of applied random loads is shown in Fig. 5. The mean andstandard deviations of the three applied loads are presented in Table 2.
Vibration responses of the beam were measured at all of the 15 sensor locations for the undamaged and damagedconditions of the beam. The data were recorded using a NI PXI data acquisition system with a sampling frequency of2048 Hz. This sampling rate was enough according to the Nyquist criterion to capture all the frequency content of thevibration responses in the range of 0–500 Hz. The vibration responses at different conditions of the beam were collectedfor 330 s. Antialiasing filters were applied to the recorded time histories to cleanse the data. The first 10 s of the measuredvibration responses were discarded in order to have stationary time histories. No windowing functions were applied tothese time histories.
3.2. Damage diagnosis process
The measured vibration responses of the beam at different sensor locations and different damage conditions wereused to validate the proposed damage detection method. It should be noted that the following discussion of the four
Please cite this article as: A.A. Mosavi, et al., Identifying damage locations under ambient vibrations utilizing vectorautoregressive models and..., Mechanical Systems and Signal Processing (2011), doi:10.1016/j.ymssp.2011.06.009

A.A. Mosavi et al. / Mechanical Systems and Signal Processing ] (]]]]) ]]]–]]] 7
step damage diagnosis are based on the vibration responses measured under the first set of random loadings onthe beam:
Step 1: As discussed before, the recorded acceleration time histories of the beam at its undamaged condition weredivided into Reference and Healthy data sets, SetR and SetH, respectively. These data sets include 327,680 data pointswhich correspond to 160 s of recorded data. SetR included the data recorded during 10–170 s while SetH included datafrom 170 to 330 s. These data sets were used as SetR and SetH when damage was available only in the 1st location. Oncethe damage was induced at location 2, the 10–170 and 170–330 s of acceleration time histories at D15 damagecondition were taken as Reference (DR15) and Healthy (DH15) data sets. The vibration time histories from all otherdamage conditions of the beam were similarly divided to two data sets, and the second data set was used as theDamage data set (SetD) for future damage extraction. All of the built data sets were segmented into 156 smaller datasamples with 4096 data points. Each data sample had 50% overlap with adjacent data samples. Generation of the datasamples in the Reference, Healthy and Damaged data sets are shown in Fig. 6.Step 2: This step started by estimating VAR models for each of the 156 segmented data samples in Reference, Healthy, andDamaged data sets. Two individual VAR models were estimated based on sensors in the two spans of the beam. The first VARmodel consisted of nine columns of data from nine sensors in the left span, and the other VAR model included six columns ofdata from six sensors in the right span. Trial and error was used to select the best order for VAR models with fit statistics AIC,and SBC used to make the final decision. A VAR (10) was selected to model the recorded time histories in the segmented datasamples. Statistical diagnostic tests were performed on the prediction errors to see if the prediction errors are a white noisesequence with a Gaussian distribution. Fig. 7(a) shows the calculated autocorrelation for these prediction errors up to lag 40.As can be seen from the horizontal reference lines, the calculated autocorrelation lies within two standard errors of 0. Fig. 7(b)shows the normal probability plot of the prediction errors showing they are very close to Gaussian.As discussed before, the estimated VAR model coefficients were used for damage feature extraction after the order selectionprocess was finalized. The VAR model coefficients jjj,1 and jjj,2 were used to extract damage features for sensor j. Theimportance of these coefficients in the regressed time series model and the reason for choosing the coefficients of the 1st and2nd time lags are further explained in Appendix A. Variation in these two coefficients will be statistically investigated to see if
Fig. 6. Data samples in (a) Reference and Healthy data sets and (b) Damage data sets.
Fig. 7. Statistical tests on sensor 5 prediction errors (a) autocorrelation with its 95% confidence interval and (b) cumulative density function.
Please cite this article as: A.A. Mosavi, et al., Identifying damage locations under ambient vibrations utilizing vectorautoregressive models and..., Mechanical Systems and Signal Processing (2011), doi:10.1016/j.ymssp.2011.06.009

Pa
A.A. Mosavi et al. / Mechanical Systems and Signal Processing ] (]]]]) ]]]–]]]8
these coefficients are reliable enough for identifying the damage locations. In total, 156 sets of these coefficients weregenerated for each sensor location from VAR model estimations in each of the 156 data samples in SetR, SetH and SetD datasets. Fig. 8 shows the plotted coefficients at different conditions of the beam for the nine sensor locations available in the leftspan of the beam. The obtained coefficients have some variability even in the healthy condition of the beam due touncertainties in the estimation and variations in the random loading on the beam. Nonetheless, the calculated coefficientsfrom Reference and Healthy data sets are very close to each other compared to the coefficients from other conditions of thebeam because coefficients from Reference and Healthy data sets come from the same physical condition of the beam undervarying loads. The scatter of VAR coefficients obtained from the Reference and Healthy data samples are highlighted usingelliptical shapes in these graphs for a better comparison. It can be seen in Fig. 8 that the amount of variation in the VARcoefficients is more distinct for the sensor 4 location in comparison to other sensor locations. This observation was used as theclue for extracting damage features.Step 3: In this step, damage features were extracted for each sensor location by measuring the amount of variation inthe selected VAR coefficients with respect to the Reference condition of the beam. In order to extract damage featuresfor the healthy condition of the beam, Mahalanobis distances were calculated between the Reference and Healthycoefficients. Similarly, Mahalanobis distances were calculated between coefficients from Reference and D11 to D15 datasets when damage was only induced at the 1st location. After inducing damage at both locations, coefficients from DR15were taken as the reference group of coefficients and the Mahalanobis distances were calculated between coefficientsfrom DR15 and D21 to D24 data sets to extract the damage features. Fig. 9 shows the probability density of thecalculated Mahalanobis distances for all 15 sensor locations at D11 to D15 damage conditions. The calculatedprobability densities were very close to normal distribution. The probability distribution of Mahalanobis distances forsensor 4, the sensor closest to the 1st damage location, is highlighted with a thicker line in these graphs.As can be seen in the graphs, the probability density of the damage features for sensor location 4 is higher than those forall other sensor locations in damage condition D15. In damage conditions D11 to D14, there are some other sensor locationswhose probability densities exceed those of sensor location 4. Larger damage features in general indicate larger deviation withrespect to the Reference condition of the beam; however, both mean and variance values of the probability densities should be
-0.5
-0.2
0.1
0.4
0.7
0 0.5 1 1.5 2ϕ77,1
ϕ 77,
2
RHD11D12D13D14D15D21D22D23D24
-1.8
-1.3
-0.8
-0.3
0.2
0.8 1.3 1.8 2.3
ϕ11,1
ϕ 11,
2
RHD11D12D13D14D15D21D22D23D24
-2
-1.5
-1
-0.5
0
0.8 1.3 1.8 2.3ϕ22,1
ϕ 22,
2
RHD11D12D13D14D15D21D22D23D24
-3.5
-2.5
-1.5
-0.5
0.5
0.8 1.8 2.8 3.8
ϕ33,1
ϕ 33,
2
RHD11D12D13D14D15D21D22D23D24
-1
-0.5
0
0.5
1
0.5 0.9 1.3 1.7ϕ44,1
ϕ 44,
2
RHD11D12D13D14D15D21D22D23D24
0
0.5
1
1.5
-0.2 0.3 0.8 1.3ϕ55,1
ϕ 55,
2
RHD11D12D13D14D15D21D22D23D24
-1
-0.5
0
0.5
1
0.4 0.9 1.4 1.9ϕ66,1
ϕ 66,
2
RHD11D12D13D14D15D21D22D23D24
-0.8
-0.3
0.2
0.7
1.2
0.5 1 1.5 2ϕ88,1
ϕ 88,
2
RHD11D12D13D14D15D21D22D23D24
-3
-2.5
-2
-1.5
-1
-0.5
0
1 1.5 2 2.5
ϕ99,1
ϕ 99,
2
RHD11D12D13D14D15D21D22D23D24
Fig. 8. Plotted VAR coefficients for different conditions of the beam at sensor locations 1 to 9 (located in the left span of the beam).
lease cite this article as: A.A. Mosavi, et al., Identifying damage locations under ambient vibrations utilizing vectorutoregressive models and..., Mechanical Systems and Signal Processing (2011), doi:10.1016/j.ymssp.2011.06.009

Fig. 9. Mahalanobis distances for all sensors at damage conditions D11 to D15.
Table 3Mean of the damage features calculated for different sensors locations at the Healthy and different Damage Conditions (DC) in the 1st damage location
under first random loading.
DC Sensor location
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15
H 2.6 2.3 2.9 2.3 2.3 2.6 3.0 2.9 2.5 2.7 2.3 3.0 2.8 3.3 2.6
D11 26 102 78 86 191 62 197 151 33 13 22 16 27 457 6
D12 14 65 25 80 88 16 519 86 19 8 6 44 76 421 32
D13 15 10 32 88 9 32 52 31 5 28 69 9 266 340 30
D14 59 19 15 175 15 35 463 56 21 9 13 56 646 716 52
D15 16 91 52 848 19 491 594 36 20 12 7 22 806 489 38
Table 4Variance of the damage features calculated for different sensors locations at the Healthy and different Damage Conditions (DC) in the 1st damage location
under first random loading.
DC Sensor location
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15
H 6 5 8 6 4 6 9 7 6 6 7 7 13 23 9
D11 98 357 487 144 2063 776 1470 1308 238 19 86 90 143 8329 20
D12 69 295 337 223 838 86 15,619 301 248 35 26 300 1568 8423 186
D13 39 74 191 341 51 215 1204 149 28 113 534 73 5000 16,493 188
D14 184 66 122 446 104 566 5207 395 59 22 94 526 12,607 13,238 340
D15 16 132 412 2747 176 5245 4731 244 108 23 15 67 8226 4841 179
Pa
A.A. Mosavi et al. / Mechanical Systems and Signal Processing ] (]]]]) ]]]–]]] 9
taken into account in order to statistically determine the meaningful amount of deviation with respect to the Healthycondition of the beam. The mean and variance values for probability density of damage features at different sensor locationsand different damage conditions of the beam are reported in Tables 3 and 4, respectively.
lease cite this article as: A.A. Mosavi, et al., Identifying damage locations under ambient vibrations utilizing vectorutoregressive models and..., Mechanical Systems and Signal Processing (2011), doi:10.1016/j.ymssp.2011.06.009

Fig. 10. Calculated Fisher criteria for different sensor locations at different damage conditions under the 1st set of random loadings.
A.A. Mosavi et al. / Mechanical Systems and Signal Processing ] (]]]]) ]]]–]]]10
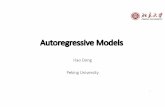
Step 4: Both the mean and variance values of the damage feature probability densities were used to statisticallymeasure the amount of the deviations in the extracted damage features with respect to the healthy condition of thebeam. To achieve this goal, Fisher criterion values were calculated using Eq. (4) for different sensor locations at differentdamage conditions of the beam. The calculated Fisher criteria for different sensor locations at different damageconditions of the beam are shown in Fig. 10. In these figures, the physical damage locations are highlighted by a verticaldashed line. Sensor 4, the sensor adjacent to the 1st damage location, was identified as the sensor with the largest valueof Fisher criterion for all damage cases D11 to D15. In other words, the estimated VAR coefficients experienced thelargest variations in this sensor location.
Similarly, sensor 11, the sensor adjacent to the 2nd damage location, was identified as the sensor with the largest valueof Fisher criterion for all damage cases D21 to D24. Since the measured vibration time history from the D15 damage casehad been taken as the reference data set in D21 to D24 damage cases, the calculated damage features for sensor 4 did notshow a large value as expected.
A critical threshold (horizontal line) was also used in Fig. 10 to identify the sensors close to the physical damagelocations from other sensor locations. The thresholds were determined by considering the 95% confidence interval limit inthe probability distribution of the Fisher criterion values at the 15 sensor locations. This limit corresponds to the meanplus 1.96 times the standard deviation calculated for Fisher criteria at the 15 sensor locations. The Fisher criterion valuesthat fall above this threshold are considered outliers, and can be used to identify the likely location(s) of damage. As can beseen in Fig. 10 both sensor 4 and 11 were successfully identified in all damage conditions, and there was no false-positivedamage identification for other sensor locations.
3.3. Damage localization under different random loadings
Another study was performed in the context of this research to see if the proposed damage diagnosis method will stillbe successful provided that the vibration responses are measured under different sources of excitation. Similar steps wererepeated for damage detection in order to investigate this. The only difference lies in using the vibration responsesmeasured under different sources of random vibration. Therefore, 468 (3�156) data samples were obtained at each sensorlocation and different conditions of the beam from vibration responses measured under different random loadings. Later,the 4 step procedure was repeated in order to extract the damage features and to perform the statistical evaluation. Themean and variance values of the probability density of damage features at different sensor locations and different damageconditions of the beam are reported in Tables 5 and 6, respectively. Also, the calculated Fisher criteria for different sensorlocations at different damage conditions of the beam are shown in Fig. 11. As can be observed in this figure, sensor 4 andsensor 11 were successfully identified in all the damage conditions of the beam as the sensors closely located to thephysical damage locations. There was only one false-positive damage identification in D23 damage for sensor 4. This wasnot expected since the data samples in the D15 data set were used as the Reference data samples to calculate the damagefeatures at D21 to D24 damage conditions. It was observed during the damage detection process that different sources ofrandom excitations did not have a major influence on the selected VAR coefficients. However, it should be noted that thefrequency content, mean and variance for all the three random excitations were close. This study suggests that the
Please cite this article as: A.A. Mosavi, et al., Identifying damage locations under ambient vibrations utilizing vectorautoregressive models and..., Mechanical Systems and Signal Processing (2011), doi:10.1016/j.ymssp.2011.06.009

Table 5Mean of the damage features calculated for different sensors locations at the Healthy and different Damage Conditions (DC) in the 1st damage location
under mixed random loadings.
DC Sensor location
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15
H 2.5 2.1 2.4 2.0 2.0 1.9 2.1 2.2 1.9 2.3 2.1 2.2 2.2 2.1 1.4
D11 11 41 46 65 197 45 137 107 15 4 19 10 17 117 2
D12 11 28 17 61 86 12 353 60 16 6 6 33 51 165 11
D13 9 7 27 67 4 22 37 21 2 21 53 6 190 97 15
D14 42 9 11 134 13 24 315 40 17 9 11 49 464 401 26
D15 13 37 38 643 10 373 401 27 11 11 6 19 588 330 20
D21 13 30 13 34 40 76 37 13 73 14 199 32 53 19 14
D22 10 2 5 31 10 39 3 6 12 4 88 27 8 8 11
D23 23 66 29 82 43 99 24 20 56 26 96 37 33 41 72
D24 48 96 36 30 37 215 129 3 124 16 110 24 14 34 32
Table 6Variance of the damage features calculated for different sensors locations at the Healthy and different Damage Conditions (DC) in the 1st damage location
under mixed random loading.
DC Sensor location
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15
H 3.9 3.8 6.1 5.0 3.8 3.3 4.3 4.7 3.6 4.8 6.6 4.4 5.7 6.3 1.8
D11 19 64 201 83 1914 457 666 674 66 3 63 27 71 545 4
D12 41 69 187 127 654 55 6976 145 137 21 23 161 763 4052 18
D13 16 38 131 195 19 119 566 71 5 81 302 25 2575 1823 53
D14 74 21 66 265 56 313 2329 174 27 14 55 372 6394 8646 124
D15 9 26 228 1555 63 3126 2092 119 38 14 13 50 4471 3598 62
D21 121 155 35 52 77 324 114 94 339 57 626 81 237 95 54
D22 15 4 11 191 26 196 10 38 34 10 258 117 33 25 41
D23 163 675 114 366 346 2077 36 60 309 235 468 181 394 299 660
D24 599 780 191 154 194 3161 584 5 624 119 297 97 112 368 307
Fig. 11. Calculated Fisher criterion for different sensor locations at different damage conditions under mixed random loadings.
Please cite this article as: A.A. Mosavi, et al., Identifying damage locations under ambient vibrations utilizing vectorautoregressive models and..., Mechanical Systems and Signal Processing (2011), doi:10.1016/j.ymssp.2011.06.009
A.A. Mosavi et al. / Mechanical Systems and Signal Processing ] (]]]]) ]]]–]]] 11

A.A. Mosavi et al. / Mechanical Systems and Signal Processing ] (]]]]) ]]]–]]]12
proposed damage diagnosis method can be successfully used to identify the damage location even if the sources ofvibrations are slightly different.
4. Conclusions
This study presents a novel sensitive damage feature in the context of statistical pattern recognition to identify damagelocation in steel beams under ambient vibrations. In order to capture spatial information of the damage, vectorautoregressive models have been proposed to predict the recorded acceleration time histories of the beam. The damagefeatures were extracted by measuring the amount of deviations in the selected coefficients of the VAR models with respectto those calculated from the healthy condition of the beam. Finally, statistical evaluations were performed on the extracteddamage features, and the sensors with the largest values of the statistical measure were identified as the sensors closest tothe damage locations. Also, a critical threshold was determined using the 95% confidence interval of the probabilitydistribution of the calculated statistical measure at different sensor locations to discriminate the sensors close to thedamage location from other sensor locations with possible high Fisher criterion value. The result of the analysis showedthat the proposed damage diagnosis method is very sensitive to the damage location, and it was able to identify thedamage location even when the damage level was very small.
The proposed damage diagnosis was also able to identify the damage locations when the source of excitation wasvarying. However, all the sources of excitations in this study were similar. The applicability of this method should befurther investigated for the conditions where sources of random excitations have completely different magnitudes orfrequency content. Like other vibration-based damage detection methods it seems that a dense array of accelerometersshould be used to identify the damage location. The optimum spacing of sensors to identify damage locations should befurther investigated. Also, it should be mentioned that the performance of the proposed method will be very dependent onthe quality of the fit. The level of non-stationarity in the vibration response of the structure should be well understoodbefore applying the proposed procedure. If the level of non-stationarity is small, larger order ARMA or VARMA time seriesmodels can be reasonably used to capture all the characteristics of vibration response in the measured excitations.However, if the level of non-stationarity is high, and the non-stationarity cannot be rejected using the Dickey–Fuller test,some other time series models can be used to capture the excitation characteristics. For instance, existing time trend in themeasured excitation can be captured by fitting an Autoregressive Integrated Moving Average (ARIMA) or VectorAutoregressive Integrated Moving Average (VARIMA) model to the measured data. The assemblage presented in thispaper can be potentially applied to the coefficients of the fitted VARIMA models. The application of ARIMA models hasbeen investigated for civil engineering structures by Carden et al. [8].
The proposed damage detection procedure in this study can be potentially used to capture other types of damage suchas local buckling in the structure; however, it should be mentioned that a successful implementation of the proposedprocedure to capture different types of damage has two requirements. The first requirement is that the measured data atmultiple locations are spatially correlated to each other and second, the measured response is locally affected by thedamage at some of the sensor locations. Therefore, special attention should be paid to the configuration of sensors which isappropriate for measuring the damage sensitive data before implementing the proposed damage detection procedure.
Acknowledgment
This material is based upon work supported by the US Department of Homeland Security under Award number: 2008-ST-061-ND 0001. The views and conclusions contained in this document are those of the authors and should not be interpreted asnecessarily representing the official policies, either expressed or implied, of the US Department of Homeland Security.
Appendix A
A set of statistical analysis is performed to statistically show the importance of the coefficients of 1st and 2nd order lagsin comparison with other terms of the time series regression model. Ten sets of time series models with 10 different ordersstarting from order 1 to order 10 are regressed to the acceleration data in one of the healthy data sets. The explained sumof squares of each of the 10 models is compared to the total sum of squares of acceleration data in the healthy data sample.In general for any regressed model, total sum of squares is the sum of the explained sum of squares and the residual sum ofsquares. The total sum of squares is a constant value during any of the 10 regressions since it only depends on the real datain the healthy sample data and is calculated from the following formula:
TSS¼Xn
i ¼ 1
ðyi�yÞ2 ðA:1Þ
where yi is the data in the healthy data sample, y is the average value of the data, and n is the number of data in the healthydata sample.
Please cite this article as: A.A. Mosavi, et al., Identifying damage locations under ambient vibrations utilizing vectorautoregressive models and..., Mechanical Systems and Signal Processing (2011), doi:10.1016/j.ymssp.2011.06.009

A.A. Mosavi et al. / Mechanical Systems and Signal Processing ] (]]]]) ]]]–]]] 13
However, the explained sum of squares is dependent on the fitted model, and it depends on the regressed data values.The explained sum of squares can be calculated from the following formula:
ESS¼Xn
i ¼ 1
ðyi�yÞ2 ðA:2Þ
where yi is the regressed value of the data in the healthy data sample. The ratio of ESS to TSS is usually used as the R2 valueto represent the goodness of the fit. In this statistical study, the value of ESS is calculated for the 10 regressed modelswhich are time series models order 1 to order 10. For example, ESS/TSS for model order 1 represents the contribution of 1sttime lag in accuracy of the time series model. Accordingly, ESS/TSS for model order 2 represents the contribution of 1st and2nd time lags in accuracy of the time series model. Therefore, ESS/TSS of model order 2 minus ESS/TSS of model order 1represents how much the 2nd time lag can contribute to improve accuracy of the time series model. The statistical study isperformed for the 10 time series models of order 1 to order 10, and the ESS contribution of each time lag in improving theaccuracy of the time series model is represented in Fig. A1 for the acceleration data measured in the 1st and 2nd sensorlocation. Also, sequential ESS/TSS values for the 10 time series models are shown for sensor 1 to sensor 9 in Table A1.
As can be seen in Fig. A1, time lags 1 and 2 have the most important contribution to the accuracy of time series models.If any of these time lags were not important in regression of a time series model, the ESS value calculated for their
0
100
200
300
400
500
1Lag number
Sum
of
squa
res.
Total sum of squares
Contribution of each lag to themodel sum of squares
Total sum of squares
Contribution of each lag to themodel sum of squares
0
50
100
150
200
Sum
of
squa
res.
2 3 4 5 6 7 8 9 10
1Lag number
2 3 4 5 6 7 8 9 10
Fig. A1. TSS and sequential ESS values for time lags 1 to 10 calculated for (a) sensor 1 and (b) sensor 2 locations.
Please cite this article as: A.A. Mosavi, et al., Identifying damage locations under ambient vibrations utilizing vectorautoregressive models and..., Mechanical Systems and Signal Processing (2011), doi:10.1016/j.ymssp.2011.06.009

Table A1Sequential ESS/TSS values for different time lags of the time series models used to regress on the data measured in sensor 1 to sensor 9 locations.
Sensor number Lag order
1 2 3 4 5 6 7 8 9 10
1 0.951 0.044 0.001 0.002 0.000 0.000 0.000 0.000 0.000 0.000
2 0.914 0.071 0.007 0.001 0.002 0.000 0.000 0.001 0.000 0.000
3 0.977 0.021 0.001 0.000 0.000 0.000 0.000 0.000 0.000 0.000
4 0.970 0.029 0.001 0.001 0.000 0.000 0.000 0.000 0.000 0.000
5 0.979 0.020 0.000 0.000 0.000 0.000 0.000 0.000 0.000 0.000
6 0.987 0.012 0.000 0.000 0.000 0.000 0.000 0.000 0.000 0.000
7 0.988 0.012 0.000 0.000 0.000 0.000 0.000 0.000 0.000 0.000
8 0.985 0.014 0.000 0.000 0.000 0.000 0.000 0.000 0.000 0.000
9 0.961 0.033 0.004 0.001 0.000 0.000 0.000 0.000 0.000 0.000
A.A. Mosavi et al. / Mechanical Systems and Signal Processing ] (]]]]) ]]]–]]]14
contribution to the time series model would have been less. This can be better explained by looking at the sequantial ESS/TSS values presented in Table A1 for different time lags, used to fit the measured data at sensor 2 location. As can be seen,the contribution of time lag 5 is more than the contribution of time lag 4, or the contribution of time lag 8 is more than thecontribution of time lag 6 and 7 for the same sensor location.
However, the analysis presented here does not necessarily mean that the data measured in all sensors can be fitted by atime series model order 2. The reason is that the fitting error obtained from time series model 1 to time series model 9does not satisfy the white noise condition to ensure the accuracy of the predicted time series model. It is desired to obtainaccurate estimates of the first two coefficients by fitting models that satisfy standard statistical assumptions (white noiseerrors) even if the contributions of lags 3–10 are small. This accurate estimation is very important for the success of theproposed damage detection technique. Therefore, a time series order 10 is fitted to the measured data in this study, butcoefficients of the first two time lags are used in the damage detection procedure since these coefficients are the mostimportant coefficients in the regressed time series model.
References
[1] S.W. Doebling, C.R. Farrar, M.B. Prime, A summary review of vibration-based damage identification methods, Shock and Vibration Digest 30 (2)(1998) 91–105.
[2] N. Stubbs, C. Sikorsky, S. Park, S. Choi, R. Bolton, Methodology to nondestructively evaluate the structural properties of bridges, in: Proceeding of the17th International Modal Analysis Conference—IMAC, Kissimmee, FL, US, 1999, pp. 1260–1268.
[3] Z. Zhang, A.E. Aktan, The damage for constructed facilities, in: Proceedings of the 13th International Modal Analysis Conference—IMAC, Nashvile, TN,1995, pp. 1520–1529.
[4] J.M.C. Dos Santos, D.C. Zimmerman, Structural damage detection using minimum rank update theory and parameter estimation, in: Proceedings ofthe AIAA/ASME/AHS adaptive structures Forum, AIAA-96-1282, 1996, pp. 168–175.
[5] C.R. Farrar, D.A. Jauregui, Comparative study of damage identification algorithms applied to a bridge: I experiment, Smart Materials and Structures 7(1998) 704–719.
[6] C.R. Farrar, D.A. Jauregui, Comparative study of damage identification algorithms applied to a bridge: II numerical study, Smart Materials andStructures 7 (1998) 720–731.
[7] H. Sohn, J.A. Czarnecki, C.R. Farrar, Structural health monitoring using statistical process control, Journal of structural engineering 126 (11) (2000)1356–1363.
[8] E.P. Carden, J.M.W. Brownjohn, ARMA modeled time-series classification for structural health monitoring of civil infrastructures, MechanicalSystems and Signal Processing 22 (2) (2007) 295–314.
[9] S.M. Pandit, S.M. Wu, Time series and system analysis with applications, Wiley, New York, US, 1983.[10] G.V. Garcia, R. Osegueda, Damage detection using ARMA model coefficients, Proceedings of SPIE, The International Society for Optical Engineering
3671 (1999) 289–296.[11] J.B. Bodeux, J.C. Golinval, Modal identification and damage detection using the data-driven stochastic subspace and VARMA methods, Mechanical
Systems and Signal Processing 17 (1) (2003) 83–89.[12] P.S. Heyns, Structural damage assessment using response-only measurement, structural damage assessment using advanced signal processing
procedures, in: Proceedings of DAMAS 97, University of Sheffield, UK, 1997, pp. 213–223.[13] A. De Stefano, D. Sabia, L. Sabia, Structural identification using VARMA models from noisy dynamic response under unknown random excitation,
structural damage assessment using advanced signal processing procedures, in: Proceedings of DAMAS 97, University of Sheffield, UK, 1997,pp. 419–429.
[14] P.C. Mahalanobis, On the generalised distance in statistics, Proceedings of the National Institute of Sciences of India 2 (1) (1936) 49–55.[15] C.M. Bishop, Neural networks for pattern recognition, Oxford University Press, Oxford, UK, 1995.[16] C.R. Farrar, G.H. James III, System identification from ambient vibration measurements on a bridge, Journal of Sound and Vibration 205 (1) (1998) 1–18.[17] H. Xianfei, B. Moaveni, J.P. Conte, A. Elgamal, S.F. Masri, Modal identification study of Vincent Thomas Bridge using simulated wind-induced ambient
vibration data, Computer-Aided Civil and Infrastructure Engineering, Special Issue: Health Monitoring of Structures 23 (5) (2008) 373–388.[18] Ove Ditlevsen, Traffic loads on large bridges modeled as white-noise loads, Journal of Engineering Mechanics 120 (4) (1994) 681–694.[19] G.E.P. Box, G.M. Jenkins, G.C. Reinsel, Time Series analysis: Forecasting and control, Prentice Hall, Englewood Cliffs, NJ, 1994.[20] L. Ljung, System identification-Theory for the user, Prentice Hall, Englewood Cliffs, NJ, 1987.[21] G. Schwarz, Estimating the dimension of a model, Annals of Statistics 6 (2) (1978) 461–464.[22] SAS 9.1.3 documentations, SAS Institutes Inc., 2008.[23] P. Anderson, Identification of Civil Engineering Structures using Vector ARMA Models, Ph.D. Thesis, Department of Building Technology and
Structural Engineering, Aalborg University, Aalborg, Denmark, May 1997.[24] P. Anderson, R. Brincker, Estimation of modal parameters and their uncertainties, in: Proceedings of the 11th International Conference on
Experimental Mechanics, Oxford, UK, 1998, paper no. 108.
Please cite this article as: A.A. Mosavi, et al., Identifying damage locations under ambient vibrations utilizing vectorautoregressive models and..., Mechanical Systems and Signal Processing (2011), doi:10.1016/j.ymssp.2011.06.009