
MECH4240 Spring 2017 Projects - Auburn Universitydbeale/MECH4240-50/MECH4240 Spring 201… ·...
17
MECH4240 Spring 2017 Projects Many projects have a fully detailed description at http://www.eng.auburn.edu/~dbeale/MECH4240‐50/ Rank your top 4 choices, in order, and email those by Wednesday, 6 pm to Ross Lambert ([email protected]); any other information you want to provide as to capabilities, special interests, team members you would like to work with, should be included in that email. All projects except perhaps one or two must fill up, in most cases students are most likely to get their first or second choice. In your top 4 choices, you must include either Fork Lift Automation for Customized Pallets or CanSat. There are 3 people of interest: 1. (Industrial) Sponsor – the primary stakeholder and project review (midterm and final review) evaluator. You can contact them between now and Wednesday at 6 pm. 2. Technical Advisor – the technical person with whom you meet periodically between reviews to monitor and offer technical advice (but not lead or manage!) as you proceed, and 3. Overlord – usually Dr. Beale (DGB) unless otherwise stated, making sure that the whole system runs smoothly and course requirements are met by all student teams.
Transcript of MECH4240 Spring 2017 Projects - Auburn Universitydbeale/MECH4240-50/MECH4240 Spring 201… ·...

MECH4240 Spring 2017 Projects Many projects have a fully detailed description at
http://www.eng.auburn.edu/~dbeale/MECH4240‐50/
Rank your top 4 choices, in order, and email those by Wednesday, 6 pm to Ross Lambert ([email protected]); any other information you want to provide as to capabilities, special interests, team members you would like to work with, should be included in that email. All projects except perhaps one or two must fill up, in most cases students are most likely to get their first or second choice. In your top 4 choices, you must include either Fork Lift Automation for Customized Pallets or CanSat.
There are 3 people of interest: 1. (Industrial) Sponsor – the primary stakeholder and project review (midterm and final review) evaluator. You can contact them between now and Wednesday at 6 pm. 2. Technical Advisor – the technical person with whom you meet periodically between reviews to monitor and offer technical advice (but not lead or manage!) as you proceed, and 3. Overlord – usually Dr. Beale (DGB) unless otherwise stated, making sure that the whole system runs smoothly and course requirements are met by all student teams.
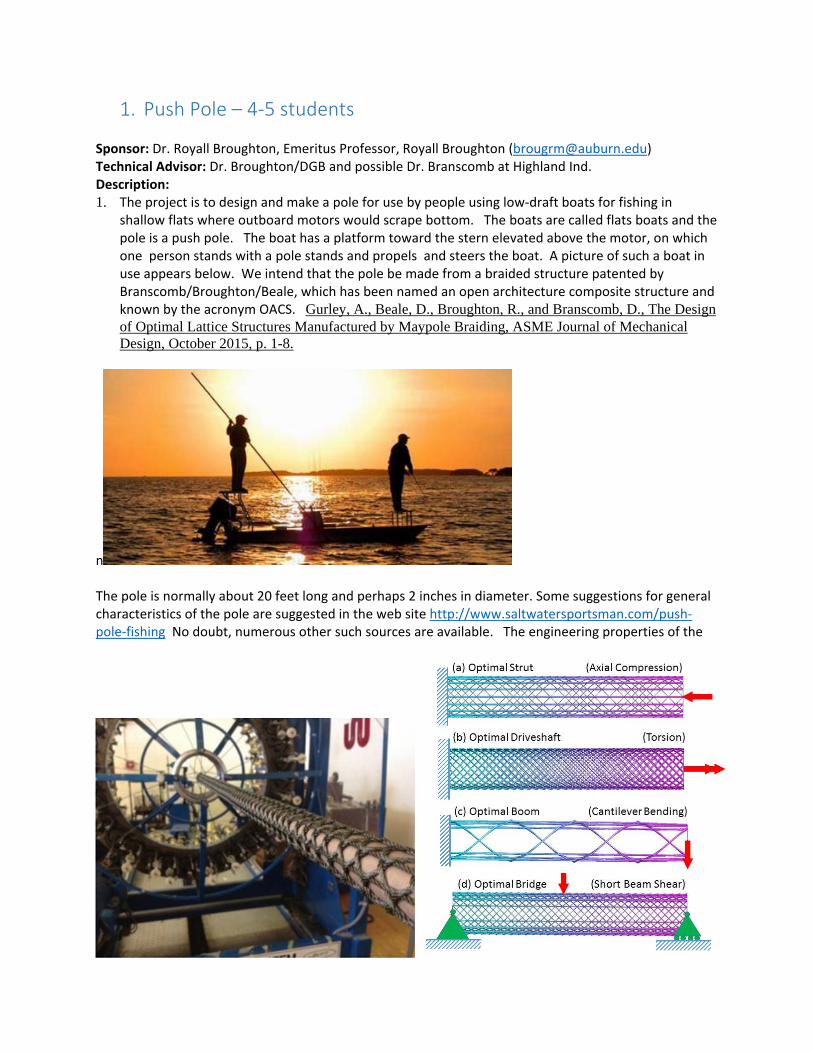
1. Push Pole – 4‐5 students Sponsor: Dr. Royall Broughton, Emeritus Professor, Royall Broughton ([email protected]) Technical Advisor: Dr. Broughton/DGB and possible Dr. Branscomb at Highland Ind. Description: 1. The project is to design and make a pole for use by people using low‐draft boats for fishing in
shallow flats where outboard motors would scrape bottom. The boats are called flats boats and the pole is a push pole. The boat has a platform toward the stern elevated above the motor, on which one person stands with a pole stands and propels and steers the boat. A picture of such a boat in use appears below. We intend that the pole be made from a braided structure patented by Branscomb/Broughton/Beale, which has been named an open architecture composite structure and known by the acronym OACS. Gurley, A., Beale, D., Broughton, R., and Branscomb, D., The Design of Optimal Lattice Structures Manufactured by Maypole Braiding, ASME Journal of Mechanical Design, October 2015, p. 1-8.
n The pole is normally about 20 feet long and perhaps 2 inches in diameter. Some suggestions for general characteristics of the pole are suggested in the web site http://www.saltwatersportsman.com/push‐pole‐fishing No doubt, numerous other such sources are available. The engineering properties of the

ideal push pole would seem to include light weight, high stiffness, and resistance to buckling. Some literature or laboratory research will be necessary to determine the desired value of these properties Modelling the effect of structure on these properties will likely be a necessary component of the design of the pole. The team is referred to the thesis work of Austin Gurley and Yang Shen and a series of other students for assistance in the necessary modelling.

2. AFRL University Design Challenge
Description: Complete description at http://www.eng.auburn.edu/~dbeale/MECH4240‐50/ Sponsor: Air Force Research Laboratory (AFRL) – should not be contacted as this time. Team manager: Amanda Skalitzky Technical Advisor: Kyle Kubik/DGB This is the 6th year of the competition, with 17 and now 9 universities and 3 service academies competing in mid‐April. AU has been the best performing team! You will be joining the 4250 team and helping with manufacturing and testing this semester, and going to the competition in April. Features: Highly creative solutions sought, job opportunities, creative and functional design wins, competition in early April, all-expense paid trip to location TBD. Will need some students to be taking the embedded systems course.
3. Ultralight RC Servo‐motor using Shape Memory Alloy
Sponsor: Austin Gurley [email protected] Technical Advisor: Austin Gurley Description: This is an opportunity to apply modern machine design and mechatronics to create an advanced robotic actuator. The objective is clear and simple – package patent‐pending shape memory alloy actuators into conventional ‘hobby servo’ form. The high strength and speed of SMA actuators is superior to motors and other technologies, but it cannot be easily accessed by engineers and hobbyists because it is not available in a useful form to incorporate in conventional machine design. The benefits of choosing this project are
Experience with detail design (i.e. the fun part) designing a machine in CAD and building functioning prototypes. (we will provide specific engineering requirements)
Electronics/automation in MATLAB or C++ (we can help here if you want)
Experience with embedded electronics – printed circuit boards, microcontrollers, etc.
Proof to future employers you know and use modern mechatronics tools and techniques
Credibility from your experience helping build this technology to a product
Significant interest from your industrial sponsor (we will not leave you ‘out to dry’)
Potential to present the design at ASME SMASIS Student Hardware Competition The most valuable line on your resume is your Capstone project ‐ make sure it is something you can be proud of completing and proud to present. Deft Dynamics LLC is a company based in Birmingham, Alabama with several daughter companies related to ultralight composites, computers for automotive racing, and solar energy.
CONTACT Ross Wesson ‐ Industrial Sponsor, Deft Dynamics CEO ([email protected]) Austin Gurley ‐ Technical Advisor, Graduate Research Assistant ([email protected])

4. Hyperloop Guidance, Navigation, and Control System Sponsor: ME Department and Dr. Williams [email protected] Technical Advisor: Dr. Williams Description: Auburn University’s Hyperloop Team proposed a subsystem design utilizing Arx Pax Hover Engine’s (magnetic levitators) lateral forces for the guidance, navigation and control (GNC) of the team’s Hyperloop pod. The senior design team will design and build a small scale hovering platform that will allow the testing and validation of various GNC approaches. The project will require and/or develop students’ mechanical design, control system design, and micro‐controller (Arduino) programming skills. During the first semester the team will establish the project requirements and complete the entire mechanical and controls design. During the second semester, students will build the hover craft, empirically determine the control forces, and then design and test several GNC approaches. This project is independent of the Auburn Hyperloop Team and students are not required to be affiliated with the Auburn Hyperloop Team to participate on the senior design project team. Micro‐controller programming skills or the desire to learn these skills are highly desirable.
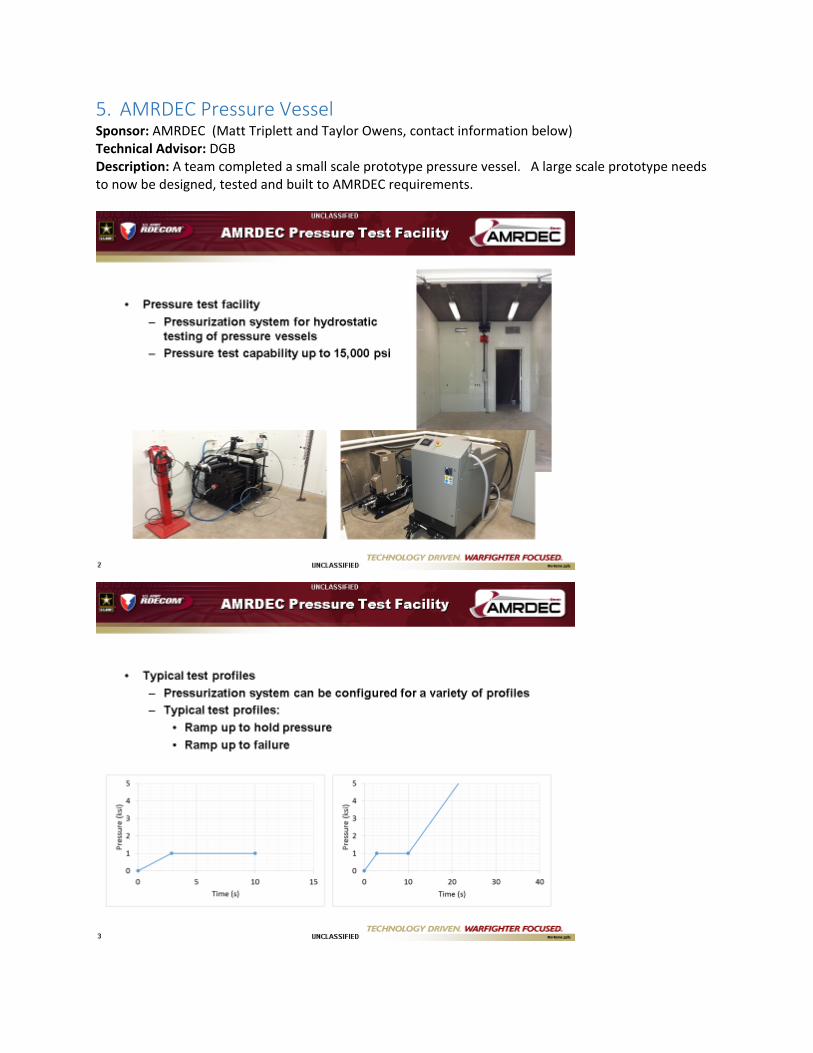
5. AMRDEC Pressure Vessel Sponsor: AMRDEC (Matt Triplett and Taylor Owens, contact information below) Technical Advisor: DGB Description: A team completed a small scale prototype pressure vessel. A large scale prototype needs to now be designed, tested and built to AMRDEC requirements.

CONTACT: Triplett, Matt H CIV (US) <[email protected]> Matt H. Triplett U. S. Army RDECOM RDMR‐WDP‐A Redstone Arsenal, AL 35898 256‐876‐1015 To: Owens, Taylor CIV (US) <[email protected] Taylor Owens, US Army AMRDEC, RDMR‐WDP‐A Redstone Arsenal, AL 35898 256‐842‐0813 (office) 256‐603‐9313 (cell)
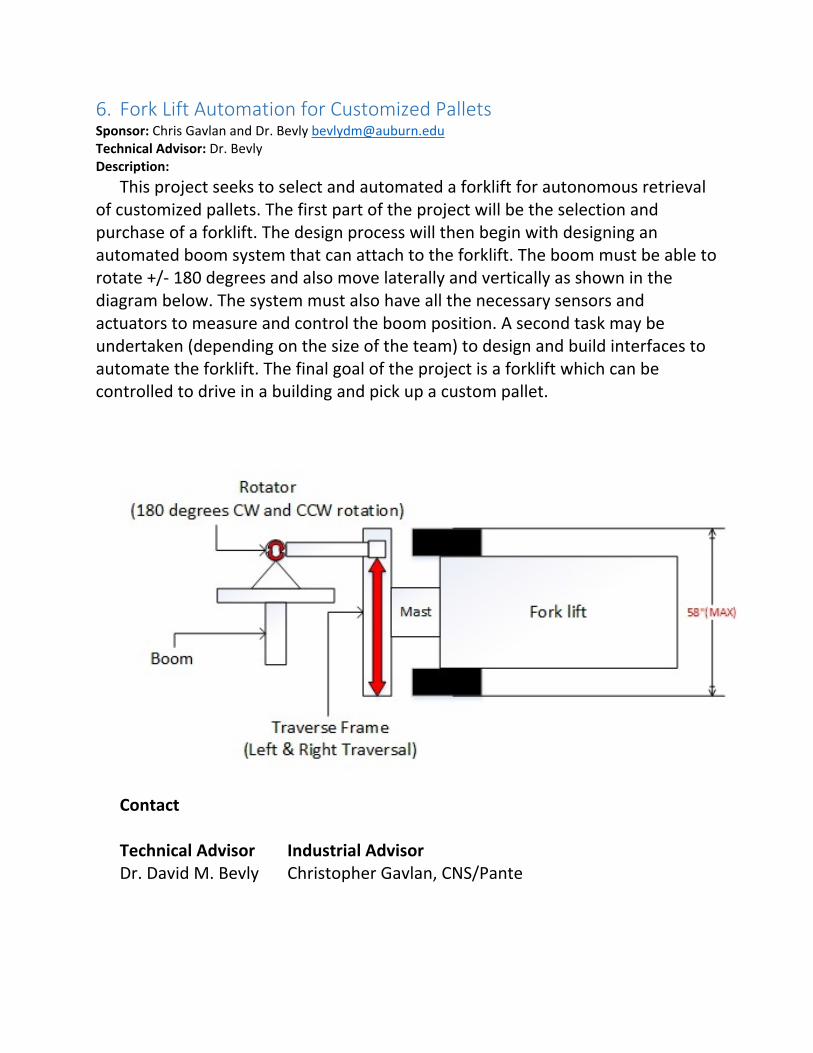
6. Fork Lift Automation for Customized Pallets Sponsor: Chris Gavlan and Dr. Bevly [email protected] Technical Advisor: Dr. Bevly Description:
This project seeks to select and automated a forklift for autonomous retrieval of customized pallets. The first part of the project will be the selection and purchase of a forklift. The design process will then begin with designing an automated boom system that can attach to the forklift. The boom must be able to rotate +/‐ 180 degrees and also move laterally and vertically as shown in the diagram below. The system must also have all the necessary sensors and actuators to measure and control the boom position. A second task may be undertaken (depending on the size of the team) to design and build interfaces to automate the forklift. The final goal of the project is a forklift which can be controlled to drive in a building and pick up a custom pallet.
Contact Technical Advisor Industrial Advisor Dr. David M. Bevly Christopher Gavlan, CNS/Pante

7. CanSat Competition 2017 Sponsor: Dr. Harris (ME) and Dr. Triggs (AE) Technical Advisor: Ross Lambert/Dr. Harris/Dr. Triggs Description: A team of students built a prototype and did some testing. Your objective is a competition ready prototype and attend at compete at the competition event. This a small satellite http://www.cansatcompetition.com/ that fits within a soft drink can or similar structure, and is launched by a rocket (rocket supplied, not to be designed). The 2017 mission simulates a solar powered sensor payload traveling through a planetary atmosphere sampling the atmospheric composition during flight. The overall CanSat system is composed of two primary components, a science vehicle and a re‐entry container that protects the vehicle during ascent, "near‐apogee" deployment and initial re‐entry/descent. When deployed from the rocket the re‐entry container shall descend with the vehicle secured in the container. Either the container shall release the vehicle or the science vehicle shall release itself from the container any time after deployment from the rocket. The intention of the container is to protect the science vehicle from the violent deployment and provide a more stable and less forceful release environment. When the science vehicle is released from the container, it shall glide in a circular pattern with a diameter of no more than 1000 meters. During flight, the glider science vehicle shall sample the air pressure and temperature at a rate of 1 sample per second and transmit the data to a ground station. The glider shall contain a magnetometer and a pitot tube to measure heading and speed. When the science vehicle lands, transmission shall automatically stop and an audio beacon shall be activated automatically for recovery if the solar cells can support the beacon power requirements.

8. Accessible Raised‐bed Garden Sponsor: Dr. Christine Fleming, Center for Disability Research and Policy Studies, [email protected], 334.844.2077 Technical Advisor: DGB Description: The project I am proposing is to create, through universal design principles, an accessible raised‐bed garden, similar to the one created by the AT Studio (see below). The Center for Disability Research and Policy Studies will provide the supervision and funding for the materials needed to create the garden. The center is pursuing a grant to assist farmers and farm workers with health conditions continue farming through assistive technology and accessbile farming tools. This project will be used as example of what can be created to assist farmers continue farming. The garden will be elevated to give access to someone who may use a chair or have other mobility issues, will also have a mechanism for self watering, as well as potential tool creation for ease of gardening with limited range of motion and dexterity. The final product will be located outside the Dawson Building to demonstrate functionality.
9. Vegetable Peeler Sponsor: ME Department and Melissa Amaya, [email protected] Technical Advisor: DGB Description: Whether a soldier who lost a limb in the line of duty, or a child with an amputation after an accident, or someone born with a limb difference, the simple task of peeling a carrot isn’t so simple for some. One of the many activities taken for granted, for many, this “simple task” is highly frustrating and maybe even avoided all together. Help me adapt the standard vegetable peeler to make life a bit easier for those with a limb difference. What may seem a dull expedition is one that can bring tremendous assistance to hundreds of thousands of people. A functional vegetable peeler that can be used by someone without a hand, yet also attractive and sleek enough for anyone and everyone to want one in their kitchen. We are shooting for a complete product design…. from concept, through multiple prototypes, through patenting and manufacturing‐ready product.

10. Formula Student Driverless Car Sponsor: Dr. Jones Technical Advisor: Dr. Jones Description: Formula Student Driverless (FSD) is a component of War Eagle Motorsports (WEMS), working alongside the traditional Formula Student Combustion (FSC) and the evolving Formula Student Electric (FSE) efforts. FSD’s purpose is to compete in Formula events at Formula speeds in an autonomous vehicle capable of a degree of self‐navigation. WEMS’ FSD program benefits from collaboration with AU’s GAVLAB (GPS And Vehicle dynamics LABoratory). WEMS is the only team from the Western Hemisphere competing in a field of 15 entries at the first international FSD competition this August in Germany. WEMS’ FSD program is making its first effort in the automation, guidance, and environment mapping of a retired FSC vehicle ‐ this will be the subject of the project in Spring and Summer 2017. Automation tasks include replacement of human control and actuation for steering, braking, throttle, and shifting. Guidance tasks include vehicle state and location sensing and optimal path planning. The near‐term focus is to create a viable competition entry. As such, automotive engineering must be applied to alter and refine the retired FSC vehicle for its best performance with different systems and mass properties than the original design. As FSD develops, in addition to realizing improvements in the baseline driverless systems and overall vehicle performance, it is probable that an original chassis and powertrain will evolve, optimally suited to FSD. Students working in the Spring and Summer of 2017 will have the opportunity to help guide this development with their experiences and council. Disclaimer: WEMS projects pay high dividends in terms of visibility and technology exposure. However, they do tend to require an exceptional degree of dedication (workload, focus, and teaming).
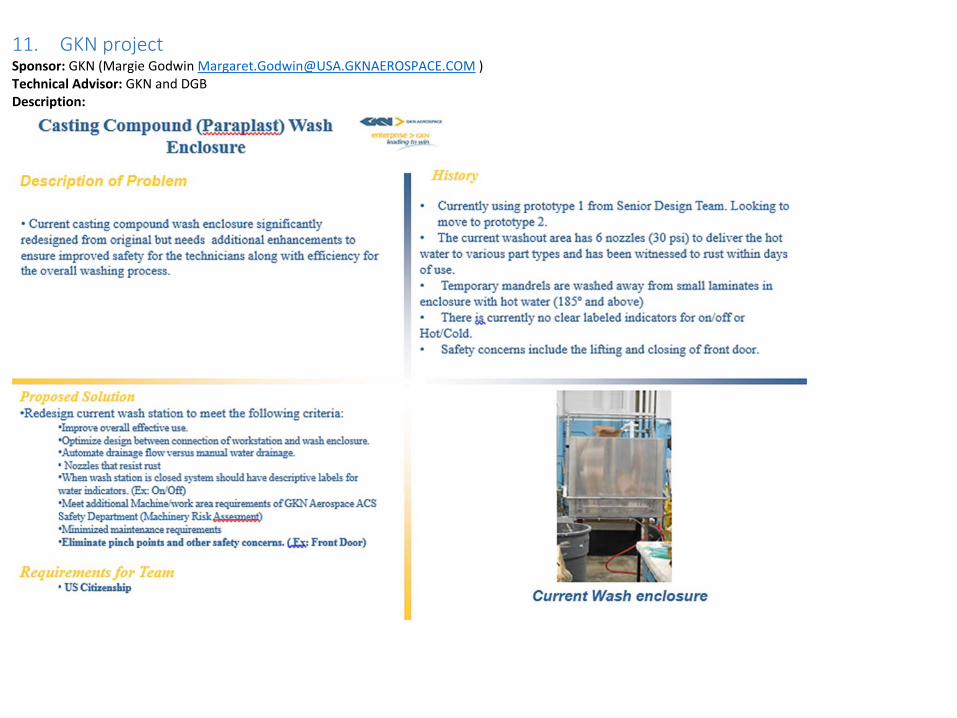
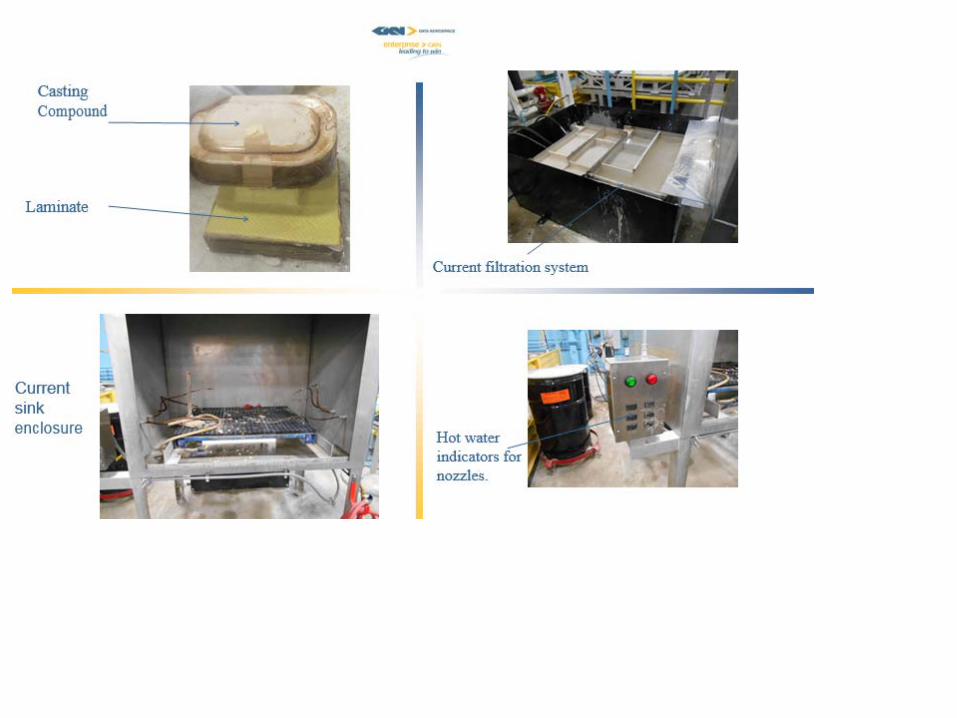
11. GKN project Sponsor: GKN (Margie Godwin [email protected] ) Technical Advisor: GKN and DGB Description:

1
Vacuum Port Washing Apparatus
Description of Problem
• Vacuum port assembly operators have to clean base manually to remove any undesired debris.
• This causes the vacuum port assembly time to vary depending on the condition of each port.
History
• GKN requires 500-600 Vacuum ports per day to process laminates
• Operators manually clean each vacuum port base before assembling. When solution is applied to certain areas of the base being cleaned, issues with the assembly can occur.
Proposed Solution
• Ergonomic solutions to remove and prevent pinch points, along with prohibit debris from being exposed.
• Introduce 2-3 automated vacuum port washing apparatus designs that will quickly clean conic shape of port.
• Clean vacuum port bases in function similar to golf balls being cleaned by golf ball cleaning machine.
• Test concept on test samples.
Requirements
• Design and build automated vacuum port base cleaner that will:
1. Safely and quickly remove residue without damaging vacuum port.
2. Cleans vacuum port base.
3. Applies release agent to bottom of base.
• Ease of use.
• GKN Confidentiality
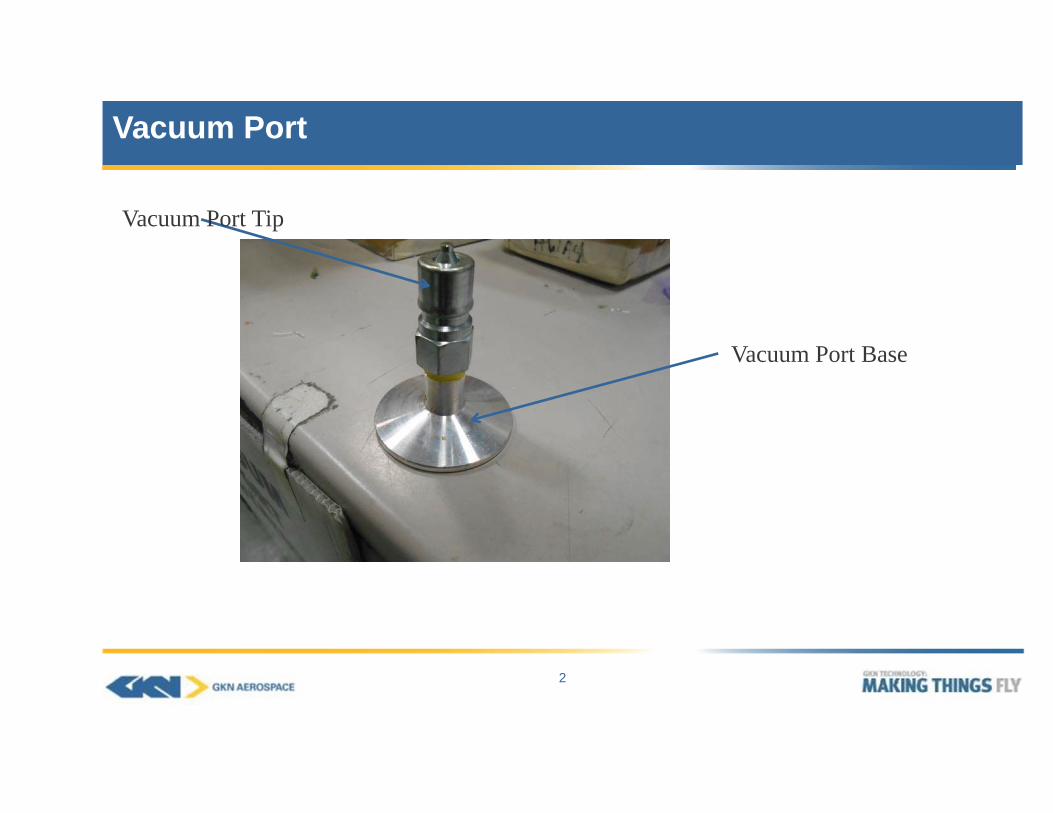
Vacuum Port Tip
Vacuum Port Base
Vacuum Port
2


















