ME 5243: ADVANCED MECHANISM DESIGNdept.me.umn.edu/courses/me5243/Class26-CourseReview.pdf · 2...
38
ME 5243: ADVANCED MECHANISM DESIGN • People’s Choice Awards • Review – Linkage Fundamentals – Linkage Synthesis – Cam Design – Spatial Mechanisms Class #26 Course Review
Transcript of ME 5243: ADVANCED MECHANISM DESIGNdept.me.umn.edu/courses/me5243/Class26-CourseReview.pdf · 2...

ME 5243:ADVANCED MECHANISM DESIGN
• People’s Choice Awards• Review
– Linkage Fundamentals– Linkage Synthesis– Cam Design– Spatial Mechanisms
Class #26Course Review

2
People’s Choice Award – Project Presentations
Honorable Mentions:• Team 3:Boldenow, Koon, Wollner
– Paper Airplane Launcher
• Team 8: Kravik, Pavelka, Pray, Zhang– Volleyball Setter
• Team 2: Boelter, Lucas, Nitz, Reinhardt– Quadcopter Arm
2nd Place:• Team 1: Creswick, Duan, Gorny, Gust
– Bicycle Lift
Winner:• Team 9: Boyce-Erickson, Fulbright, Simmons, Zeilon
– Nerf Gun

3
• 42nd Mechanisms and Robotics Conference (MR) – Paper Draft: March 12, 2018
• Student Mechanism Design Competition– http://sites.google.com/site/asmesmrdc/– Letter of Intent: Early April

4
Notes• Final Report & Rebuttal Letter: due by 5pm• Final Exam: Tues, Dec 19th, 8:00-10:00 am
– Example Final Posted• Office Hours:
– Today: 11-12– Thursday: 10-11– Monday: 11-12
• Peer Evaluations: Tuesday, Dec 19th

5
Fundamentals
• Links: Binary, Ternary, Quaternary, etc.• Joints: Pin, Slider, Roll-Slide, Screw,
Cylindrical, Spherical, Planar• Mobility
– Kutzbach Criterion: General (Spatial)– Gruebler’s Equation: F = 3(n-1) – 2f1 – f2
• F: Degrees of Freedom• n: Number of Links• f1: Number of Full Joints• f2: Number of Half Joints

6
Fundamentals: Classification
• Task: Function, Path, Motion• Range of Motion:
– Grashof Criteria: S + L ≤ P + Q– Barker Classification
• Link Sets– Slider-Crank Inversions– Geared 5-bars– 6-bars
• Stephenson: Ternaries Separated• Watt: Ternaries Connected

7
Fundamentals: Operation
• Branch vs. Circuit– Branch: Pass through toggle– Circuit: Disassemble to reach inversion
• Transmission Angle: – Acute angle between coupler and output links
• Mechanical Advantage– MA = Fout / Fin = rin/rout * ωin/ωout
– Use Instant Centers for Angular Velocity Ratio

8
Synthesis:
• Type Synthesis– Number Synthesis: DOF, # Links, # Link Sets– Topological Synthesis: # Topologies + Isomers– Topological Analysis: Best Inversions?, Alt Joints?
• Dimensional Synthesis– Graphical– Analytical

9
Graphical Synthesis: Motion• Pick Moving Pivots (2 & 3 PPs)
• Ground Pivot Specification (3 PPs)1. Pick Gnd Pivots2. Find AO’ and A0” using inversion3. Find A1 at center of A0, A0’,A0”

10
Graphical Synthesis: Path (3 PPs)1. Pick Gnd Pivots and A1
2. Find A2, A3
3. Find A0’, A0”4. Locate B0’, B0”
1. A0B0 = A0’B0’2. P2B0 = P1B0’
5. Locate B1

11
Graphical Synthesis: Function (3 PPs)1. Pick Gnd Pivots and A1
2. Locate A0’ and A0” w/ -ψj rotation of A0B0 about B0
3. Locate A2’ and A3’1. A0A1 = A0’A2’2. B0A2 = B0A2’
4. Locate B1 at the center of A1, A2’, A3’

12
Chebychev Spacing
1. Draw circle with dia = Δx2. Inscribe regular polygon w/ 2n sides

13

14
M & K Circle Construction
PP1
PP2
PP3
P12
P13
P23
1. Find the poles: P12, P23, P132. Find the image pole: P23’

15
PP1
PP2
PP3
P12
P13
P23
P23’
3. Draw lines for centers of m & k1 circles: a. m circle touches P13 and P23b. k circle touches P13 and P23’.

16
PP1
PP2
PP3
P12
P13
P23
P23’Center of m-circles
Center of k-circles
4. Draw m circle: P13 Cm P23 = β25. Draw k circle: P23’ Ck P13 = α2-β2

17
PP1
PP2
PP3
P12
P13
P23
P23’Cm
Center of m-circles
Center of k-circles
4. Draw m circle: P13 Cm P23 = β25. Draw k circle: P23’ Ck P13 = α2-β2

18
PP1
PP2
PP3
P12
P13
P23
P23’Cm
Ck
Center of m-circles
Center of k-circles
4. Draw m circle: P13 Cm P23 = β25. Draw k circle: P23’ Ck P13 = α2-β26. Draw ray from P12 to a point on m-circle (picking β3), label it M

19
PP1
PP2
PP3
P12
P13
P23
P23’Cm
Ck
Center of m-circles
Center of k-circles
M
6. Draw ray from P12 to a point on m circle (picking β3), label it M7. Find corresponding point on k1 circle
a. Rotate line P12 M by -β2/2 at Mb. Rotate line P12 M by -α2/2 at P12

20
PP1
PP2
PP3
P12
P13
P23
P23’Cm
Ck
Center of m-circles
Center of k-circles
M
6. Draw ray from P12 to a point on m circle (picking β3), label it M7. Find corresponding point on k1 circle
a. Rotate line P12 M by -β2/2 at Mb. Rotate line P12 M by -α2/2 at P12

21
PP1
PP2
PP3
P12
P13
P23
P23’Cm
Ck
Center of m-circles
Center of k-circles
M
K
6. Draw ray from P12 to a point on m circle (picking β3), label it M7. Find corresponding point on k1 circle
a. Rotate line P12 M by -β2/2 at Mb. Rotate line P12 M by -α2/2 at P12

22
PP1
PP2
PP3
P12
P13
P23
P23’
M
K
8. Draw dyad in 1st and 3rd positions9. Measure β3

23
PP1
PP2
PP3

24

25
Parallel Motion 6-bar• Parallel Motion is Useful for Many
Applications– Parallel Motion 4-bars: Only Circular Motion
• Leveraging Cognates Allows Construction of a Parallel Motion 6-bar (Watt I)
2
3
4
5
6
7
10
8
9

26
Parallel Motion 6-bar• Recognizing that ω2 = ω7
6
82
3
4
5
6
7

27
Geared 5-bar• A Geared 5-bar Can Create the Coupler Curve of Any 4-bar
αα
α

28
Geared 5-bar• A Geared 5-bar Can Create the Coupler Curve of Any 4-bar
α
α

29

30
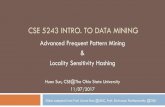
Cam Design
S
V
A
J
Source: Norton, Design of Machinery

31
Fundamental Law of Cam Design:The cam-follower function must have continuous
velocity and acceleration across the entire interval, thus making the jerk finite.
Profile Selection:• Obey fundamental law• Low peak acceleration:
F = ma• Low peak velocity:
KE = 0.5 mv2
• Smoother jerk = lower vibrations

32
Common Double-Dwell Functions

33
Polynomial Cam Segments
θ
s
θ
v
θ
a
θ
j

34
Polynomial Segments
• Minimize the number of segments• Start with the segment you know most about• Use polynomials where possible• Minimize the number of boundary conditions

35
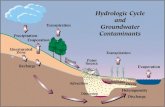
Cam Sizing
• Size cam for:– Pressure angle– Radius of curvature– Forces / Stresses
• By adjusting:– Prime circle, RP
– Eccentricity, – Follower radius, RF

36
Conveyor Belt Chaser RP = 5 in, Rf = 2 in, ε = -1 in
0 50 100 150 200 250 300 350angle (deg)
-10
0
10
0 50 100 150 200 250 300 350angle (deg)
-5
0
5
0 50 100 150 200 250 300 350angle (deg)
-10
0
10
0 50 100 150 200 250 300 350angle (deg)
-20
0
20
-15 -10 -5 0 5 10 15-15
-10
-5
0
5
10
5 5 5 100 150 60

37

38
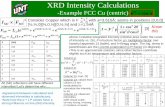
14 weeks ago, you told me your goals for this course
• Did you meet your goals? Why/Why not?
11111
222
33
46
910
0 2 4 6 8 10 12
Prepare for QualsPrototyping
Basis for Soft MechanismsMechanism Optimization
Improve Design SkillsPass the Course
Computer Synthesis ToolsEarn an A
Mechanism AnalysisExperience for Career
Visualize Mechanism MotionDesign Useful ProjectAdvanced Synthesis
Real-World Applications
chimein.cla.umn.edu or text 1-503-770-6789(text 22616 plus your answer)