MCMC and likelihood-free methods
300
MCMC and Likelihood-free Methods MCMC and Likelihood-free Methods Christian P. Robert Universit´ e Paris-Dauphine & CREST http://www.ceremade.dauphine.fr/ ~ xian November 2, 2010
-
Upload
christian-robert -
Category
Education
-
view
4.086 -
download
6
description
Evolutionary slides for my course in Wharton, UPenn, October 25 / November 1, 2010
Transcript of MCMC and likelihood-free methods

MCMC and Likelihood-free Methods
MCMC and Likelihood-free Methods
Christian P. Robert
Universite Paris-Dauphine & CRESThttp://www.ceremade.dauphine.fr/~xian
November 2, 2010

MCMC and Likelihood-free Methods
Outline
Computational issues in Bayesian statistics
The Metropolis-Hastings Algorithm
The Gibbs Sampler
Population Monte Carlo
Approximate Bayesian computation
ABC for model choice

MCMC and Likelihood-free Methods
Computational issues in Bayesian statistics
Motivation and leading example
Computational issues in Bayesian statistics
The Metropolis-Hastings Algorithm
The Gibbs Sampler
Population Monte Carlo
Approximate Bayesian computation
ABC for model choice

MCMC and Likelihood-free Methods
Computational issues in Bayesian statistics
Latent variables
Latent structures make life harder!
Even simple models may lead to computational complications, asin latent variable models
f(x|θ) =∫f?(x, x?|θ) dx?
If (x, x?) observed, fine!If only x observed, trouble!

MCMC and Likelihood-free Methods
Computational issues in Bayesian statistics
Latent variables
Latent structures make life harder!
Even simple models may lead to computational complications, asin latent variable models
f(x|θ) =∫f?(x, x?|θ) dx?
If (x, x?) observed, fine!
If only x observed, trouble!

MCMC and Likelihood-free Methods
Computational issues in Bayesian statistics
Latent variables
Latent structures make life harder!
Even simple models may lead to computational complications, asin latent variable models
f(x|θ) =∫f?(x, x?|θ) dx?
If (x, x?) observed, fine!If only x observed, trouble!

MCMC and Likelihood-free Methods
Computational issues in Bayesian statistics
Latent variables
Example (Mixture models)
Models of mixtures of distributions:
X ∼ fj with probability pj ,
for j = 1, 2, . . . , k, with overall density
X ∼ p1f1(x) + · · ·+ pkfk(x) .
For a sample of independent random variables (X1, · · · , Xn),sample density
n∏i=1
{p1f1(xi) + · · ·+ pkfk(xi)} .
Expanding this product of sums into a sum of products involves kn
elementary terms: too prohibitive to compute in large samples.

MCMC and Likelihood-free Methods
Computational issues in Bayesian statistics
Latent variables
Example (Mixture models)
Models of mixtures of distributions:
X ∼ fj with probability pj ,
for j = 1, 2, . . . , k, with overall density
X ∼ p1f1(x) + · · ·+ pkfk(x) .
For a sample of independent random variables (X1, · · · , Xn),sample density
n∏i=1
{p1f1(xi) + · · ·+ pkfk(xi)} .
Expanding this product of sums into a sum of products involves kn
elementary terms: too prohibitive to compute in large samples.

MCMC and Likelihood-free Methods
Computational issues in Bayesian statistics
Latent variables
Example (Mixture models)
Models of mixtures of distributions:
X ∼ fj with probability pj ,
for j = 1, 2, . . . , k, with overall density
X ∼ p1f1(x) + · · ·+ pkfk(x) .
For a sample of independent random variables (X1, · · · , Xn),sample density
n∏i=1
{p1f1(xi) + · · ·+ pkfk(xi)} .
Expanding this product of sums into a sum of products involves kn
elementary terms: too prohibitive to compute in large samples.

MCMC and Likelihood-free Methods
Computational issues in Bayesian statistics
Latent variables
Simple mixture (1)
−1 0 1 2 3
−1
01
23
µ1
µ 2
Case of the 0.3N (µ1, 1) + 0.7N (µ2, 1) likelihood

MCMC and Likelihood-free Methods
Computational issues in Bayesian statistics
Latent variables
Simple mixture (2)
For the mixture of two normal distributions,
0.3N (µ1, 1) + 0.7N (µ2, 1) ,
likelihood proportional to
n∏i=1
[0.3ϕ (xi − µ1) + 0.7 ϕ (xi − µ2)]
containing 2n terms.

MCMC and Likelihood-free Methods
Computational issues in Bayesian statistics
Latent variables
Complex maximisation
Standard maximization techniques often fail to find the globalmaximum because of multimodality or undesirable behavior(usually at the frontier of the domain) of the likelihood function.
Example
In the special case
f(x|µ, σ) = (1− ε) exp{(−1/2)x2}+ε
σexp{(−1/2σ2)(x− µ)2}
with ε > 0 known,
whatever n, the likelihood is unbounded:
limσ→0
L(x1, . . . , xn|µ = x1, σ) =∞

MCMC and Likelihood-free Methods
Computational issues in Bayesian statistics
Latent variables
Complex maximisation
Standard maximization techniques often fail to find the globalmaximum because of multimodality or undesirable behavior(usually at the frontier of the domain) of the likelihood function.
Example
In the special case
f(x|µ, σ) = (1− ε) exp{(−1/2)x2}+ε
σexp{(−1/2σ2)(x− µ)2}
with ε > 0 known, whatever n, the likelihood is unbounded:
limσ→0
L(x1, . . . , xn|µ = x1, σ) =∞

MCMC and Likelihood-free Methods
Computational issues in Bayesian statistics
Latent variables
Unbounded likelihood
−2 0 2 4 6
12
34
µ
n= 3
−2 0 2 4 6
12
34
µ
σ
n= 6
−2 0 2 4 6
12
34
µ
n= 12
−2 0 2 4 6
12
34
µ
σ
n= 24
−2 0 2 4 6
12
34
µ
n= 48
−2 0 2 4 6
12
34
µ
σ
n= 96
Case of the 0.3N (0, 1) + 0.7N (µ, σ) likelihood

MCMC and Likelihood-free Methods
Computational issues in Bayesian statistics
Latent variables
Example (Mixture once again)
press for MA Observations from
x1, . . . , xn ∼ f(x|θ) = pϕ(x;µ1, σ1) + (1− p)ϕ(x;µ2, σ2)
Prior
µi|σi ∼ N (ξi, σ2i /ni), σ2
i ∼ I G (νi/2, s2i /2), p ∼ Be(α, β)
Posterior
π(θ|x1, . . . , xn) ∝n∏j=1
{pϕ(xj ;µ1, σ1) + (1− p)ϕ(xj ;µ2, σ2)}π(θ)
=n∑`=0
∑(kt)
ω(kt)π(θ|(kt))
[O(2n)]

MCMC and Likelihood-free Methods
Computational issues in Bayesian statistics
Latent variables
Example (Mixture once again)
press for MA Observations from
x1, . . . , xn ∼ f(x|θ) = pϕ(x;µ1, σ1) + (1− p)ϕ(x;µ2, σ2)
Prior
µi|σi ∼ N (ξi, σ2i /ni), σ2
i ∼ I G (νi/2, s2i /2), p ∼ Be(α, β)
Posterior
π(θ|x1, . . . , xn) ∝n∏j=1
{pϕ(xj ;µ1, σ1) + (1− p)ϕ(xj ;µ2, σ2)}π(θ)
=n∑`=0
∑(kt)
ω(kt)π(θ|(kt))
[O(2n)]

MCMC and Likelihood-free Methods
Computational issues in Bayesian statistics
Latent variables
Example (Mixture once again)
press for MA Observations from
x1, . . . , xn ∼ f(x|θ) = pϕ(x;µ1, σ1) + (1− p)ϕ(x;µ2, σ2)
Prior
µi|σi ∼ N (ξi, σ2i /ni), σ2
i ∼ I G (νi/2, s2i /2), p ∼ Be(α, β)
Posterior
π(θ|x1, . . . , xn) ∝n∏j=1
{pϕ(xj ;µ1, σ1) + (1− p)ϕ(xj ;µ2, σ2)}π(θ)
=n∑`=0
∑(kt)
ω(kt)π(θ|(kt))
[O(2n)]

MCMC and Likelihood-free Methods
Computational issues in Bayesian statistics
Latent variables
Example (Mixture once again (cont’d))
For a given permutation (kt), conditional posterior distribution
π(θ|(kt)) = N
(ξ1(kt),
σ21
n1 + `
)×I G ((ν1 + `)/2, s1(kt)/2)
×N
(ξ2(kt),
σ22
n2 + n− `
)×I G ((ν2 + n− `)/2, s2(kt)/2)
×Be(α+ `, β + n− `)

MCMC and Likelihood-free Methods
Computational issues in Bayesian statistics
Latent variables
Example (Mixture once again (cont’d))
where
x1(kt) = 1`
∑`t=1 xkt , s1(kt) =
∑`t=1(xkt − x1(kt))2,
x2(kt) = 1n−`
∑nt=`+1 xkt , s2(kt) =
∑nt=`+1(xkt − x2(kt))2
and
ξ1(kt) =n1ξ1 + `x1(kt)
n1 + `, ξ2(kt) =
n2ξ2 + (n− `)x2(kt)n2 + n− `
,
s1(kt) = s21 + s2
1(kt) +n1`
n1 + `(ξ1 − x1(kt))2,
s2(kt) = s22 + s2
2(kt) +n2(n− `)n2 + n− `
(ξ2 − x2(kt))2,
posterior updates of the hyperparameters

MCMC and Likelihood-free Methods
Computational issues in Bayesian statistics
Latent variables
Example (Mixture once again)
Bayes estimator of θ:
δπ(x1, . . . , xn) =n∑`=0
∑(kt)
ω(kt)Eπ[θ|x, (kt)]
Too costly: 2n terms

MCMC and Likelihood-free Methods
Computational issues in Bayesian statistics
The AR(p) model
AR(p) model
Auto-regressive representation of a time series,
xt|xt−1, . . . ∼ N
(µ+
p∑i=1
%i(xt−i − µ), σ2
)
I Generalisation of AR(1)I Among the most commonly used models in dynamic settings
I More challenging than the static models (stationarityconstraints)
I Different models depending on the processing of the startingvalue x0

MCMC and Likelihood-free Methods
Computational issues in Bayesian statistics
The AR(p) model
AR(p) model
Auto-regressive representation of a time series,
xt|xt−1, . . . ∼ N
(µ+
p∑i=1
%i(xt−i − µ), σ2
)
I Generalisation of AR(1)I Among the most commonly used models in dynamic settings
I More challenging than the static models (stationarityconstraints)
I Different models depending on the processing of the startingvalue x0

MCMC and Likelihood-free Methods
Computational issues in Bayesian statistics
The AR(p) model
Unknown stationarity constraints
Practical difficulty: for complex models, stationarity constraints getquite involved to the point of being unknown in some cases
Example (AR(1))
Case of linear Markovian dependence on the last value
xt = µ+ %(xt−1 − µ) + εt , εti.i.d.∼ N (0, σ2)
If |%| < 1, (xt)t∈Z can be written as
xt = µ+∞∑j=0
%jεt−j
and this is a stationary representation.

MCMC and Likelihood-free Methods
Computational issues in Bayesian statistics
The AR(p) model
Stationary but...
If |%| > 1, alternative stationary representation
xt = µ−∞∑j=1
%−jεt+j .
This stationary solution is criticized as artificial because xt iscorrelated with future white noises (εt)s>t, unlike the case when|%| < 1.Non-causal representation...

MCMC and Likelihood-free Methods
Computational issues in Bayesian statistics
The AR(p) model
Stationary but...
If |%| > 1, alternative stationary representation
xt = µ−∞∑j=1
%−jεt+j .
This stationary solution is criticized as artificial because xt iscorrelated with future white noises (εt)s>t, unlike the case when|%| < 1.Non-causal representation...

MCMC and Likelihood-free Methods
Computational issues in Bayesian statistics
The AR(p) model
Stationarity+causality
Stationarity constraints in the prior as a restriction on the values ofθ.
Theorem
AR(p) model second-order stationary and causal iff the roots of thepolynomial
P(x) = 1−p∑i=1
%ixi
are all outside the unit circle

MCMC and Likelihood-free Methods
Computational issues in Bayesian statistics
The AR(p) model
Stationarity constraints
Under stationarity constraints, complex parameter space: eachvalue of % needs to be checked for roots of correspondingpolynomial with modulus less than 1
E.g., for an AR(2) process withautoregressive polynomialP(u) = 1− %1u− %2u
2, constraint is
%1 + %2 < 1, %1 − %2 < 1
and |%2| < 1
●
−2 −1 0 1 2
−1.
0−
0.5
0.0
0.5
1.0
θ1
θ 2

MCMC and Likelihood-free Methods
Computational issues in Bayesian statistics
The AR(p) model
Stationarity constraints
Under stationarity constraints, complex parameter space: eachvalue of % needs to be checked for roots of correspondingpolynomial with modulus less than 1
E.g., for an AR(2) process withautoregressive polynomialP(u) = 1− %1u− %2u
2, constraint is
%1 + %2 < 1, %1 − %2 < 1
and |%2| < 1
●
−2 −1 0 1 2
−1.
0−
0.5
0.0
0.5
1.0
θ1
θ 2

MCMC and Likelihood-free Methods
Computational issues in Bayesian statistics
The MA(q) model
The MA(q) model
Alternative type of time series
xt = µ+ εt −q∑j=1
ϑjεt−j , εt ∼ N (0, σ2)
Stationary but, for identifiability considerations, the polynomial
Q(x) = 1−q∑j=1
ϑjxj
must have all its roots outside the unit circle.

MCMC and Likelihood-free Methods
Computational issues in Bayesian statistics
The MA(q) model
Identifiability
Example
For the MA(1) model, xt = µ+ εt − ϑ1εt−1,
var(xt) = (1 + ϑ21)σ2
can also be written
xt = µ+ εt−1 −1ϑ1εt, ε ∼ N (0, ϑ2
1σ2) ,
Both pairs (ϑ1, σ) & (1/ϑ1, ϑ1σ) lead to alternativerepresentations of the same model.

MCMC and Likelihood-free Methods
Computational issues in Bayesian statistics
The MA(q) model
Properties of MA models
I Non-Markovian model (but special case of hidden Markov)
I Autocovariance γx(s) is null for |s| > q

MCMC and Likelihood-free Methods
Computational issues in Bayesian statistics
The MA(q) model
Representations
x1:T is a normal random variable with constant mean µ andcovariance matrix
Σ =
σ2 γ1 γ2 . . . γq 0 . . . 0 0γ1 σ2 γ1 . . . γq−1 γq . . . 0 0
. . .
0 0 0 . . . 0 0 . . . γ1 σ2
,
with (|s| ≤ q)
γs = σ2
q−|s|∑i=0
ϑiϑi+|s|
Not manageable in practice [large T’s]

MCMC and Likelihood-free Methods
Computational issues in Bayesian statistics
The MA(q) model
Representations (contd.)
Conditional on past (ε0, . . . , ε−q+1),
L(µ, ϑ1, . . . , ϑq, σ|x1:T , ε0, . . . , ε−q+1) ∝
σ−TT∏
t=1
exp
−xt − µ+
q∑j=1
ϑj εt−j
2 /2σ2
,
where (t > 0)
εt = xt − µ+q∑j=1
ϑj εt−j , ε0 = ε0, . . . , ε1−q = ε1−q
Recursive definition of the likelihood, still costly O(T × q)

MCMC and Likelihood-free Methods
Computational issues in Bayesian statistics
The MA(q) model
Representations (contd.)
Encompassing approach for general time series modelsState-space representation
xt = Gyt + εt , (1)
yt+1 = Fyt + ξt , (2)
(1) is the observation equation and (2) is the state equation
Note
This is a special case of hidden Markov model

MCMC and Likelihood-free Methods
Computational issues in Bayesian statistics
The MA(q) model
Representations (contd.)
Encompassing approach for general time series modelsState-space representation
xt = Gyt + εt , (1)
yt+1 = Fyt + ξt , (2)
(1) is the observation equation and (2) is the state equation
Note
This is a special case of hidden Markov model

MCMC and Likelihood-free Methods
Computational issues in Bayesian statistics
The MA(q) model
MA(q) state-space representation
For the MA(q) model, take
yt = (εt−q, . . . , εt−1, εt)′
and then
yt+1 =
0 1 0 . . . 00 0 1 . . . 0
. . .0 0 0 . . . 10 0 0 . . . 0
yt + εt+1
00...01
xt = µ−
(ϑq ϑq−1 . . . ϑ1 −1
)yt .

MCMC and Likelihood-free Methods
Computational issues in Bayesian statistics
The MA(q) model
MA(q) state-space representation (cont’d)
Example
For the MA(1) model, observation equation
xt = (1 0)yt
withyt = (y1t y2t)′
directed by the state equation
yt+1 =(
0 10 0
)yt + εt+1
(1ϑ1
).

MCMC and Likelihood-free Methods
Computational issues in Bayesian statistics
The MA(q) model
c© A typology of Bayes computational problems
(i). latent variable models in general
(ii). use of a complex parameter space, as for instance inconstrained parameter sets like those resulting from imposingstationarity constraints in dynamic models;
(iii). use of a complex sampling model with an intractablelikelihood, as for instance in some graphical models;
(iv). use of a huge dataset;
(v). use of a complex prior distribution (which may be theposterior distribution associated with an earlier sample);
(vi). use of a particular inferential procedure as for instance, Bayesfactors
Bπ01(x) =
P (θ ∈ Θ0 | x)P (θ ∈ Θ1 | x)
/π(θ ∈ Θ0)π(θ ∈ Θ1)
.

MCMC and Likelihood-free Methods
Computational issues in Bayesian statistics
The MA(q) model
c© A typology of Bayes computational problems
(i). latent variable models in general
(ii). use of a complex parameter space, as for instance inconstrained parameter sets like those resulting from imposingstationarity constraints in dynamic models;
(iii). use of a complex sampling model with an intractablelikelihood, as for instance in some graphical models;
(iv). use of a huge dataset;
(v). use of a complex prior distribution (which may be theposterior distribution associated with an earlier sample);
(vi). use of a particular inferential procedure as for instance, Bayesfactors
Bπ01(x) =
P (θ ∈ Θ0 | x)P (θ ∈ Θ1 | x)
/π(θ ∈ Θ0)π(θ ∈ Θ1)
.

MCMC and Likelihood-free Methods
Computational issues in Bayesian statistics
The MA(q) model
c© A typology of Bayes computational problems
(i). latent variable models in general
(ii). use of a complex parameter space, as for instance inconstrained parameter sets like those resulting from imposingstationarity constraints in dynamic models;
(iii). use of a complex sampling model with an intractablelikelihood, as for instance in some graphical models;
(iv). use of a huge dataset;
(v). use of a complex prior distribution (which may be theposterior distribution associated with an earlier sample);
(vi). use of a particular inferential procedure as for instance, Bayesfactors
Bπ01(x) =
P (θ ∈ Θ0 | x)P (θ ∈ Θ1 | x)
/π(θ ∈ Θ0)π(θ ∈ Θ1)
.

MCMC and Likelihood-free Methods
Computational issues in Bayesian statistics
The MA(q) model
c© A typology of Bayes computational problems
(i). latent variable models in general
(ii). use of a complex parameter space, as for instance inconstrained parameter sets like those resulting from imposingstationarity constraints in dynamic models;
(iii). use of a complex sampling model with an intractablelikelihood, as for instance in some graphical models;
(iv). use of a huge dataset;
(v). use of a complex prior distribution (which may be theposterior distribution associated with an earlier sample);
(vi). use of a particular inferential procedure as for instance, Bayesfactors
Bπ01(x) =
P (θ ∈ Θ0 | x)P (θ ∈ Θ1 | x)
/π(θ ∈ Θ0)π(θ ∈ Θ1)
.

MCMC and Likelihood-free Methods
Computational issues in Bayesian statistics
The MA(q) model
c© A typology of Bayes computational problems
(i). latent variable models in general
(ii). use of a complex parameter space, as for instance inconstrained parameter sets like those resulting from imposingstationarity constraints in dynamic models;
(iii). use of a complex sampling model with an intractablelikelihood, as for instance in some graphical models;
(iv). use of a huge dataset;
(v). use of a complex prior distribution (which may be theposterior distribution associated with an earlier sample);
(vi). use of a particular inferential procedure as for instance, Bayesfactors
Bπ01(x) =
P (θ ∈ Θ0 | x)P (θ ∈ Θ1 | x)
/π(θ ∈ Θ0)π(θ ∈ Θ1)
.

MCMC and Likelihood-free Methods
Computational issues in Bayesian statistics
The MA(q) model
c© A typology of Bayes computational problems
(i). latent variable models in general
(ii). use of a complex parameter space, as for instance inconstrained parameter sets like those resulting from imposingstationarity constraints in dynamic models;
(iii). use of a complex sampling model with an intractablelikelihood, as for instance in some graphical models;
(iv). use of a huge dataset;
(v). use of a complex prior distribution (which may be theposterior distribution associated with an earlier sample);
(vi). use of a particular inferential procedure as for instance, Bayesfactors
Bπ01(x) =
P (θ ∈ Θ0 | x)P (θ ∈ Θ1 | x)
/π(θ ∈ Θ0)π(θ ∈ Θ1)
.

MCMC and Likelihood-free Methods
The Metropolis-Hastings Algorithm
The Metropolis-Hastings Algorithm
Computational issues in Bayesian statistics
The Metropolis-Hastings AlgorithmMonte Carlo basicsImportance SamplingMonte Carlo Methods based on Markov ChainsThe Metropolis–Hastings algorithmRandom-walk Metropolis-Hastings algorithmsExtensions
The Gibbs Sampler
Population Monte Carlo
Approximate Bayesian computation
ABC for model choice

MCMC and Likelihood-free Methods
The Metropolis-Hastings Algorithm
Monte Carlo basics
General purpose
Given a density π known up to a normalizing constant, and anintegrable function h, compute
Π(h) =∫h(x)π(x)µ(dx) =
∫h(x)π(x)µ(dx)∫π(x)µ(dx)
when∫h(x)π(x)µ(dx) is intractable.

MCMC and Likelihood-free Methods
The Metropolis-Hastings Algorithm
Monte Carlo basics
Monte Carlo 101
Generate an iid sample x1, . . . , xN from π and estimate Π(h) by
ΠMCN (h) = N−1
N∑i=1
h(xi).
LLN: ΠMCN (h) as−→ Π(h)
If Π(h2) =∫h2(x)π(x)µ(dx) <∞,
CLT:√N(
ΠMCN (h)−Π(h)
)L N
(0,Π
{[h−Π(h)]2
}).
Caveat announcing MCMC
Often impossible or inefficient to simulate directly from Π

MCMC and Likelihood-free Methods
The Metropolis-Hastings Algorithm
Monte Carlo basics
Monte Carlo 101
Generate an iid sample x1, . . . , xN from π and estimate Π(h) by
ΠMCN (h) = N−1
N∑i=1
h(xi).
LLN: ΠMCN (h) as−→ Π(h)
If Π(h2) =∫h2(x)π(x)µ(dx) <∞,
CLT:√N(
ΠMCN (h)−Π(h)
)L N
(0,Π
{[h−Π(h)]2
}).
Caveat announcing MCMC
Often impossible or inefficient to simulate directly from Π

MCMC and Likelihood-free Methods
The Metropolis-Hastings Algorithm
Importance Sampling
Importance Sampling
For Q proposal distribution such that Q(dx) = q(x)µ(dx),alternative representation
Π(h) =∫h(x){π/q}(x)q(x)µ(dx).
Principle of importance
Generate an iid sample x1, . . . , xN ∼ Q and estimate Π(h) by
ΠISQ,N (h) = N−1
N∑i=1
h(xi){π/q}(xi).
return to pMC

MCMC and Likelihood-free Methods
The Metropolis-Hastings Algorithm
Importance Sampling
Importance Sampling
For Q proposal distribution such that Q(dx) = q(x)µ(dx),alternative representation
Π(h) =∫h(x){π/q}(x)q(x)µ(dx).
Principle of importance
Generate an iid sample x1, . . . , xN ∼ Q and estimate Π(h) by
ΠISQ,N (h) = N−1
N∑i=1
h(xi){π/q}(xi).
return to pMC

MCMC and Likelihood-free Methods
The Metropolis-Hastings Algorithm
Importance Sampling
Properties of importance
ThenLLN: ΠIS
Q,N (h) as−→ Π(h) and if Q((hπ/q)2) <∞,
CLT:√N(ΠIS
Q,N (h)−Π(h)) L N
(0, Q{(hπ/q −Π(h))2}
).
Caveat
If normalizing constant of π unknown, impossible to use ΠISQ,N
Generic problem in Bayesian Statistics: π(θ|x) ∝ f(x|θ)π(θ).

MCMC and Likelihood-free Methods
The Metropolis-Hastings Algorithm
Importance Sampling
Properties of importance
ThenLLN: ΠIS
Q,N (h) as−→ Π(h) and if Q((hπ/q)2) <∞,
CLT:√N(ΠIS
Q,N (h)−Π(h)) L N
(0, Q{(hπ/q −Π(h))2}
).
Caveat
If normalizing constant of π unknown, impossible to use ΠISQ,N
Generic problem in Bayesian Statistics: π(θ|x) ∝ f(x|θ)π(θ).

MCMC and Likelihood-free Methods
The Metropolis-Hastings Algorithm
Importance Sampling
Self-Normalised Importance Sampling
Self normalized version
ΠSNISQ,N (h) =
(N∑i=1
{π/q}(xi)
)−1 N∑i=1
h(xi){π/q}(xi).
LLN : ΠSNISQ,N (h) as−→ Π(h)
and if Π((1 + h2)(π/q)) <∞,
CLT :√N(ΠSNIS
Q,N (h)−Π(h)) L N
(0, π {(π/q)(h−Π(h)}2)
).
c© The quality of the SNIS approximation depends on thechoice of Q

MCMC and Likelihood-free Methods
The Metropolis-Hastings Algorithm
Importance Sampling
Self-Normalised Importance Sampling
Self normalized version
ΠSNISQ,N (h) =
(N∑i=1
{π/q}(xi)
)−1 N∑i=1
h(xi){π/q}(xi).
LLN : ΠSNISQ,N (h) as−→ Π(h)
and if Π((1 + h2)(π/q)) <∞,
CLT :√N(ΠSNIS
Q,N (h)−Π(h)) L N
(0, π {(π/q)(h−Π(h)}2)
).
c© The quality of the SNIS approximation depends on thechoice of Q

MCMC and Likelihood-free Methods
The Metropolis-Hastings Algorithm
Importance Sampling
Self-Normalised Importance Sampling
Self normalized version
ΠSNISQ,N (h) =
(N∑i=1
{π/q}(xi)
)−1 N∑i=1
h(xi){π/q}(xi).
LLN : ΠSNISQ,N (h) as−→ Π(h)
and if Π((1 + h2)(π/q)) <∞,
CLT :√N(ΠSNIS
Q,N (h)−Π(h)) L N
(0, π {(π/q)(h−Π(h)}2)
).
c© The quality of the SNIS approximation depends on thechoice of Q

MCMC and Likelihood-free Methods
The Metropolis-Hastings Algorithm
Monte Carlo Methods based on Markov Chains
Running Monte Carlo via Markov Chains (MCMC)
It is not necessary to use a sample from the distribution f toapproximate the integral
I =∫
h(x)f(x)dx ,
We can obtain X1, . . . , Xn ∼ f (approx) without directlysimulating from f , using an ergodic Markov chain withstationary distribution f

MCMC and Likelihood-free Methods
The Metropolis-Hastings Algorithm
Monte Carlo Methods based on Markov Chains
Running Monte Carlo via Markov Chains (MCMC)
It is not necessary to use a sample from the distribution f toapproximate the integral
I =∫
h(x)f(x)dx ,
We can obtain X1, . . . , Xn ∼ f (approx) without directlysimulating from f , using an ergodic Markov chain withstationary distribution f

MCMC and Likelihood-free Methods
The Metropolis-Hastings Algorithm
Monte Carlo Methods based on Markov Chains
Running Monte Carlo via Markov Chains (2)
Idea
For an arbitrary starting value x(0), an ergodic chain (X(t)) isgenerated using a transition kernel with stationary distribution f
I Insures the convergence in distribution of (X(t)) to a randomvariable from f .
I For a “large enough” T0, X(T0) can be considered asdistributed from f
I Produce a dependent sample X(T0), X(T0+1), . . ., which isgenerated from f , sufficient for most approximation purposes.
Problem: How can one build a Markov chain with a givenstationary distribution?

MCMC and Likelihood-free Methods
The Metropolis-Hastings Algorithm
Monte Carlo Methods based on Markov Chains
Running Monte Carlo via Markov Chains (2)
Idea
For an arbitrary starting value x(0), an ergodic chain (X(t)) isgenerated using a transition kernel with stationary distribution f
I Insures the convergence in distribution of (X(t)) to a randomvariable from f .
I For a “large enough” T0, X(T0) can be considered asdistributed from f
I Produce a dependent sample X(T0), X(T0+1), . . ., which isgenerated from f , sufficient for most approximation purposes.
Problem: How can one build a Markov chain with a givenstationary distribution?

MCMC and Likelihood-free Methods
The Metropolis-Hastings Algorithm
Monte Carlo Methods based on Markov Chains
Running Monte Carlo via Markov Chains (2)
Idea
For an arbitrary starting value x(0), an ergodic chain (X(t)) isgenerated using a transition kernel with stationary distribution f
I Insures the convergence in distribution of (X(t)) to a randomvariable from f .
I For a “large enough” T0, X(T0) can be considered asdistributed from f
I Produce a dependent sample X(T0), X(T0+1), . . ., which isgenerated from f , sufficient for most approximation purposes.
Problem: How can one build a Markov chain with a givenstationary distribution?

MCMC and Likelihood-free Methods
The Metropolis-Hastings Algorithm
The Metropolis–Hastings algorithm
The Metropolis–Hastings algorithm
BasicsThe algorithm uses the objective (target) density
f
and a conditional densityq(y|x)
called the instrumental (or proposal) distribution

MCMC and Likelihood-free Methods
The Metropolis-Hastings Algorithm
The Metropolis–Hastings algorithm
The MH algorithm
Algorithm (Metropolis–Hastings)
Given x(t),
1. Generate Yt ∼ q(y|x(t)).
2. Take
X(t+1) =
{Yt with prob. ρ(x(t), Yt),x(t) with prob. 1− ρ(x(t), Yt),
where
ρ(x, y) = min{f(y)f(x)
q(x|y)q(y|x)
, 1}.

MCMC and Likelihood-free Methods
The Metropolis-Hastings Algorithm
The Metropolis–Hastings algorithm
Features
I Independent of normalizing constants for both f and q(·|x)(ie, those constants independent of x)
I Never move to values with f(y) = 0I The chain (x(t))t may take the same value several times in a
row, even though f is a density wrt Lebesgue measure
I The sequence (yt)t is usually not a Markov chain

MCMC and Likelihood-free Methods
The Metropolis-Hastings Algorithm
The Metropolis–Hastings algorithm
Convergence properties
1. The M-H Markov chain is reversible, withinvariant/stationary density f since it satisfies the detailedbalance condition
f(y)K(y, x) = f(x)K(x, y)
2. As f is a probability measure, the chain is positive recurrent
3. If
Pr
[f(Yt) q(X(t)|Yt)f(X(t)) q(Yt|X(t))
≥ 1
]< 1. (1)
that is, the event {X(t+1) = X(t)} is possible, then the chainis aperiodic

MCMC and Likelihood-free Methods
The Metropolis-Hastings Algorithm
The Metropolis–Hastings algorithm
Convergence properties
1. The M-H Markov chain is reversible, withinvariant/stationary density f since it satisfies the detailedbalance condition
f(y)K(y, x) = f(x)K(x, y)
2. As f is a probability measure, the chain is positive recurrent
3. If
Pr
[f(Yt) q(X(t)|Yt)f(X(t)) q(Yt|X(t))
≥ 1
]< 1. (1)
that is, the event {X(t+1) = X(t)} is possible, then the chainis aperiodic

MCMC and Likelihood-free Methods
The Metropolis-Hastings Algorithm
The Metropolis–Hastings algorithm
Convergence properties
1. The M-H Markov chain is reversible, withinvariant/stationary density f since it satisfies the detailedbalance condition
f(y)K(y, x) = f(x)K(x, y)
2. As f is a probability measure, the chain is positive recurrent
3. If
Pr
[f(Yt) q(X(t)|Yt)f(X(t)) q(Yt|X(t))
≥ 1
]< 1. (1)
that is, the event {X(t+1) = X(t)} is possible, then the chainis aperiodic

MCMC and Likelihood-free Methods
The Metropolis-Hastings Algorithm
The Metropolis–Hastings algorithm
Convergence properties (2)
4. Ifq(y|x) > 0 for every (x, y), (2)
the chain is irreducible
5. For M-H, f -irreducibility implies Harris recurrence6. Thus, for M-H satisfying (1) and (2)
(i) For h, with Ef |h(X)| <∞,
limT→∞
1T
T∑t=1
h(X(t)) =∫h(x)df(x) a.e. f.
(ii) and
limn→∞
∥∥∥∥∫ Kn(x, ·)µ(dx)− f∥∥∥∥
TV
= 0
for every initial distribution µ, where Kn(x, ·) denotes thekernel for n transitions.

MCMC and Likelihood-free Methods
The Metropolis-Hastings Algorithm
The Metropolis–Hastings algorithm
Convergence properties (2)
4. Ifq(y|x) > 0 for every (x, y), (2)
the chain is irreducible
5. For M-H, f -irreducibility implies Harris recurrence
6. Thus, for M-H satisfying (1) and (2)(i) For h, with Ef |h(X)| <∞,
limT→∞
1T
T∑t=1
h(X(t)) =∫h(x)df(x) a.e. f.
(ii) and
limn→∞
∥∥∥∥∫ Kn(x, ·)µ(dx)− f∥∥∥∥
TV
= 0
for every initial distribution µ, where Kn(x, ·) denotes thekernel for n transitions.

MCMC and Likelihood-free Methods
The Metropolis-Hastings Algorithm
The Metropolis–Hastings algorithm
Convergence properties (2)
4. Ifq(y|x) > 0 for every (x, y), (2)
the chain is irreducible
5. For M-H, f -irreducibility implies Harris recurrence6. Thus, for M-H satisfying (1) and (2)
(i) For h, with Ef |h(X)| <∞,
limT→∞
1T
T∑t=1
h(X(t)) =∫h(x)df(x) a.e. f.
(ii) and
limn→∞
∥∥∥∥∫ Kn(x, ·)µ(dx)− f∥∥∥∥
TV
= 0
for every initial distribution µ, where Kn(x, ·) denotes thekernel for n transitions.

MCMC and Likelihood-free Methods
The Metropolis-Hastings Algorithm
Random-walk Metropolis-Hastings algorithms
Random walk Metropolis–Hastings
Use of a local perturbation as proposal
Yt = X(t) + εt,
where εt ∼ g, independent of X(t).The instrumental density is of the form g(y − x) and the Markovchain is a random walk if we take g to be symmetric g(x) = g(−x)

MCMC and Likelihood-free Methods
The Metropolis-Hastings Algorithm
Random-walk Metropolis-Hastings algorithms
Algorithm (Random walk Metropolis)
Given x(t)
1. Generate Yt ∼ g(y − x(t))2. Take
X(t+1) =
Yt with prob. min{
1,f(Yt)f(x(t))
},
x(t) otherwise.

MCMC and Likelihood-free Methods
The Metropolis-Hastings Algorithm
Random-walk Metropolis-Hastings algorithms
Example (Random walk and normal target)
forget History! Generate N (0, 1) based on the uniform proposal [−δ, δ][Hastings (1970)]
The probability of acceptance is then
ρ(x(t), yt) = exp{(x(t)2 − y2t )/2} ∧ 1.

MCMC and Likelihood-free Methods
The Metropolis-Hastings Algorithm
Random-walk Metropolis-Hastings algorithms
Example (Random walk & normal (2))
Sample statistics
δ 0.1 0.5 1.0
mean 0.399 -0.111 0.10variance 0.698 1.11 1.06
c© As δ ↑, we get better histograms and a faster exploration of thesupport of f .

MCMC and Likelihood-free Methods
The Metropolis-Hastings Algorithm
Random-walk Metropolis-Hastings algorithms
-1 0 1 2
050
100
150
200
250
(a)
-1.5
-1.0
-0.5
0.0
0.5
-2 0 2
010
020
030
040
0
(b)
-1.5
-1.0
-0.5
0.0
0.5
-3 -2 -1 0 1 2 3
010
020
030
040
0
(c)
-1.5
-1.0
-0.5
0.0
0.5
Three samples based on U [−δ, δ] with (a) δ = 0.1, (b) δ = 0.5and (c) δ = 1.0, superimposed with the convergence of themeans (15, 000 simulations).

MCMC and Likelihood-free Methods
The Metropolis-Hastings Algorithm
Random-walk Metropolis-Hastings algorithms
Example (Mixture models)
π(θ|x) ∝n∏j=1
(k∑`=1
p`f(xj |µ`, σ`)
)π(θ)
Metropolis-Hastings proposal:
θ(t+1) ={θ(t) + ωε(t) if u(t) < ρ(t)
θ(t) otherwise
where
ρ(t) =π(θ(t) + ωε(t)|x)
π(θ(t)|x)∧ 1
and ω scaled for good acceptance rate

MCMC and Likelihood-free Methods
The Metropolis-Hastings Algorithm
Random-walk Metropolis-Hastings algorithms
Example (Mixture models)
π(θ|x) ∝n∏j=1
(k∑`=1
p`f(xj |µ`, σ`)
)π(θ)
Metropolis-Hastings proposal:
θ(t+1) ={θ(t) + ωε(t) if u(t) < ρ(t)
θ(t) otherwise
where
ρ(t) =π(θ(t) + ωε(t)|x)
π(θ(t)|x)∧ 1
and ω scaled for good acceptance rate

MCMC and Likelihood-free Methods
The Metropolis-Hastings Algorithm
Random-walk Metropolis-Hastings algorithms
p
thet
a
0.0 0.2 0.4 0.6 0.8 1.0
-10
12
tau
thet
a
0.2 0.4 0.6 0.8 1.0 1.2
-10
12
p
tau
0.0 0.2 0.4 0.6 0.8 1.0
0.2
0.4
0.6
0.8
1.0
1.2
-1 0 1 2
0.0
1.0
2.0
theta
0.2 0.4 0.6 0.8
02
4
tau
0.0 0.2 0.4 0.6 0.8 1.0
01
23
45
6
p
Random walk sampling (50000 iterations)
General case of a 3 component normal mixture[Celeux & al., 2000]

MCMC and Likelihood-free Methods
The Metropolis-Hastings Algorithm
Random-walk Metropolis-Hastings algorithms
−1 0 1 2 3
−1
01
23
µ1
µ 2
X
Random walk MCMC output for .7N (µ1, 1) + .3N (µ2, 1)

MCMC and Likelihood-free Methods
The Metropolis-Hastings Algorithm
Random-walk Metropolis-Hastings algorithms
Convergence properties
Uniform ergodicity prohibited by random walk structure
At best, geometric ergodicity:
Theorem (Sufficient ergodicity)
For a symmetric density f , log-concave in the tails, and a positiveand symmetric density g, the chain (X(t)) is geometrically ergodic.
[Mengersen & Tweedie, 1996]
no tail effect

MCMC and Likelihood-free Methods
The Metropolis-Hastings Algorithm
Random-walk Metropolis-Hastings algorithms
Convergence properties
Uniform ergodicity prohibited by random walk structureAt best, geometric ergodicity:
Theorem (Sufficient ergodicity)
For a symmetric density f , log-concave in the tails, and a positiveand symmetric density g, the chain (X(t)) is geometrically ergodic.
[Mengersen & Tweedie, 1996]
no tail effect

MCMC and Likelihood-free Methods
The Metropolis-Hastings Algorithm
Random-walk Metropolis-Hastings algorithms
Example (Comparison of taileffects)
Random-walkMetropolis–Hastings algorithmsbased on a N (0, 1) instrumentalfor the generation of (a) aN (0, 1) distribution and (b) adistribution with densityψ(x) ∝ (1 + |x|)−3
(a)
0 50 100 150 200
-1.5
-1.0
-0.5
0.0
0.5
1.0
1.5
(a)
0 50 100 150 200
-1.5
-1.0
-0.5
0.0
0.5
1.0
1.5
0 50 100 150 200
-1.5
-1.0
-0.5
0.0
0.5
1.0
1.5
0 50 100 150 200
-1.5
-1.0
-0.5
0.0
0.5
1.0
1.5
(b)
0 50 100 150 200
-1.5
-1.0
-0.5
0.0
0.5
1.0
1.5
0 50 100 150 200
-1.5
-1.0
-0.5
0.0
0.5
1.0
1.5
0 50 100 150 200
-1.5
-1.0
-0.5
0.0
0.5
1.0
1.5
90% confidence envelopes ofthe means, derived from 500parallel independent chains
1 + ξ2
1 + (ξ′)2∧ 1 ,

MCMC and Likelihood-free Methods
The Metropolis-Hastings Algorithm
Random-walk Metropolis-Hastings algorithms
Further convergence properties
Under assumptions skip detailed convergence
I (A1) f is super-exponential, i.e. it is positive with positivecontinuous first derivative such thatlim|x|→∞ n(x)′∇ log f(x) = −∞ where n(x) := x/|x|.In words : exponential decay of f in every direction with ratetending to ∞
I (A2) lim sup|x|→∞ n(x)′m(x) < 0, wherem(x) = ∇f(x)/|∇f(x)|.In words: non degeneracy of the countour manifoldCf(y) = {y : f(y) = f(x)}
Q is geometrically ergodic, andV (x) ∝ f(x)−1/2 verifies the drift condition
[Jarner & Hansen, 2000]

MCMC and Likelihood-free Methods
The Metropolis-Hastings Algorithm
Random-walk Metropolis-Hastings algorithms
Further [further] convergence properties
skip hyperdetailed convergence
If P ψ-irreducible and aperiodic, for r = (r(n))n∈N real-valued nondecreasing sequence, such that, for all n,m ∈ N,
r(n+m) ≤ r(n)r(m),
and r(0) = 1, for C a small set, τC = inf{n ≥ 1, Xn ∈ C}, andh ≥ 1, assume
supx∈C
Ex
[τC−1∑k=0
r(k)h(Xk)
]<∞,

MCMC and Likelihood-free Methods
The Metropolis-Hastings Algorithm
Random-walk Metropolis-Hastings algorithms
then,
S(f, C, r) :=
{x ∈ X,Ex
{τC−1∑k=0
r(k)h(Xk)
}<∞
}
is full and absorbing and for x ∈ S(f, C, r),
limn→∞
r(n)‖Pn(x, .)− f‖h = 0.
[Tuominen & Tweedie, 1994]

MCMC and Likelihood-free Methods
The Metropolis-Hastings Algorithm
Random-walk Metropolis-Hastings algorithms
Comments
I [CLT, Rosenthal’s inequality...] h-ergodicity implies CLTfor additive (possibly unbounded) functionals of the chain,Rosenthal’s inequality and so on...
I [Control of the moments of the return-time] Thecondition implies (because h ≥ 1) that
supx∈C
Ex[r0(τC)] ≤ supx∈C
Ex
{τC−1∑k=0
r(k)h(Xk)
}<∞,
where r0(n) =∑n
l=0 r(l) Can be used to derive bounds forthe coupling time, an essential step to determine computablebounds, using coupling inequalities
[Roberts & Tweedie, 1998; Fort & Moulines, 2000]

MCMC and Likelihood-free Methods
The Metropolis-Hastings Algorithm
Random-walk Metropolis-Hastings algorithms
Alternative conditions
The condition is not really easy to work with...[Possible alternative conditions]
(a) [Tuominen, Tweedie, 1994] There exists a sequence(Vn)n∈N, Vn ≥ r(n)h, such that
(i) supC V0 <∞,(ii) {V0 =∞} ⊂ {V1 =∞} and(iii) PVn+1 ≤ Vn − r(n)h+ br(n)IC .

MCMC and Likelihood-free Methods
The Metropolis-Hastings Algorithm
Random-walk Metropolis-Hastings algorithms
(b) [Fort 2000] ∃V ≥ f ≥ 1 and b <∞, such that supC V <∞and
PV (x) + Ex
{σC∑k=0
∆r(k)f(Xk)
}≤ V (x) + bIC(x)
where σC is the hitting time on C and
∆r(k) = r(k)− r(k − 1), k ≥ 1 and ∆r(0) = r(0).
Result (a) ⇔ (b) ⇔ supx∈C Ex{∑τC−1
k=0 r(k)f(Xk)}<∞.

MCMC and Likelihood-free Methods
The Metropolis-Hastings Algorithm
Extensions
Langevin Algorithms
Proposal based on the Langevin diffusion Lt is defined by thestochastic differential equation
dLt = dBt +12∇ log f(Lt)dt,
where Bt is the standard Brownian motion
Theorem
The Langevin diffusion is the only non-explosive diffusion which isreversible with respect to f .

MCMC and Likelihood-free Methods
The Metropolis-Hastings Algorithm
Extensions
Discretization
Instead, consider the sequence
x(t+1) = x(t) +σ2
2∇ log f(x(t)) + σεt, εt ∼ Np(0, Ip)
where σ2 corresponds to the discretization step
Unfortunately, the discretized chain may be be transient, forinstance when
limx→±∞
∣∣σ2∇ log f(x)|x|−1∣∣ > 1

MCMC and Likelihood-free Methods
The Metropolis-Hastings Algorithm
Extensions
Discretization
Instead, consider the sequence
x(t+1) = x(t) +σ2
2∇ log f(x(t)) + σεt, εt ∼ Np(0, Ip)
where σ2 corresponds to the discretization stepUnfortunately, the discretized chain may be be transient, forinstance when
limx→±∞
∣∣σ2∇ log f(x)|x|−1∣∣ > 1

MCMC and Likelihood-free Methods
The Metropolis-Hastings Algorithm
Extensions
MH correction
Accept the new value Yt with probability
f(Yt)f(x(t))
·exp
{−∥∥∥Yt − x(t) − σ2
2 ∇ log f(x(t))∥∥∥2/
2σ2
}exp
{−∥∥∥x(t) − Yt − σ2
2 ∇ log f(Yt)∥∥∥2/
2σ2
} ∧ 1 .
Choice of the scaling factor σShould lead to an acceptance rate of 0.574 to achieve optimalconvergence rates (when the components of x are uncorrelated)
[Roberts & Rosenthal, 1998; Girolami & Calderhead, 2011]

MCMC and Likelihood-free Methods
The Metropolis-Hastings Algorithm
Extensions
Optimizing the Acceptance Rate
Problem of choice of the transition kernel from a practical point ofviewMost common alternatives:
(a) a fully automated algorithm like ARMS;
(b) an instrumental density g which approximates f , such thatf/g is bounded for uniform ergodicity to apply;
(c) a random walk
In both cases (b) and (c), the choice of g is critical,

MCMC and Likelihood-free Methods
The Metropolis-Hastings Algorithm
Extensions
Case of the random walk
Different approach to acceptance ratesA high acceptance rate does not indicate that the algorithm ismoving correctly since it indicates that the random walk is movingtoo slowly on the surface of f .
If x(t) and yt are close, i.e. f(x(t)) ' f(yt) y is accepted withprobability
min(f(yt)f(x(t))
, 1)' 1 .
For multimodal densities with well separated modes, the negativeeffect of limited moves on the surface of f clearly shows.

MCMC and Likelihood-free Methods
The Metropolis-Hastings Algorithm
Extensions
Case of the random walk
Different approach to acceptance ratesA high acceptance rate does not indicate that the algorithm ismoving correctly since it indicates that the random walk is movingtoo slowly on the surface of f .If x(t) and yt are close, i.e. f(x(t)) ' f(yt) y is accepted withprobability
min(f(yt)f(x(t))
, 1)' 1 .
For multimodal densities with well separated modes, the negativeeffect of limited moves on the surface of f clearly shows.

MCMC and Likelihood-free Methods
The Metropolis-Hastings Algorithm
Extensions
Case of the random walk (2)
If the average acceptance rate is low, the successive values of f(yt)tend to be small compared with f(x(t)), which means that therandom walk moves quickly on the surface of f since it oftenreaches the “borders” of the support of f

MCMC and Likelihood-free Methods
The Metropolis-Hastings Algorithm
Extensions
Rule of thumb
In small dimensions, aim at an average acceptance rate of 50%. Inlarge dimensions, at an average acceptance rate of 25%.
[Gelman,Gilks and Roberts, 1995]
This rule is to be taken with a pinch of salt!

MCMC and Likelihood-free Methods
The Metropolis-Hastings Algorithm
Extensions
Rule of thumb
In small dimensions, aim at an average acceptance rate of 50%. Inlarge dimensions, at an average acceptance rate of 25%.
[Gelman,Gilks and Roberts, 1995]
This rule is to be taken with a pinch of salt!

MCMC and Likelihood-free Methods
The Metropolis-Hastings Algorithm
Extensions
Example (Noisy AR(1))
Hidden Markov chain from a regular AR(1) model,
xt+1 = ϕxt + εt+1 εt ∼ N (0, τ2)
and observablesyt|xt ∼ N (x2
t , σ2)
The distribution of xt given xt−1, xt+1 and yt is
exp−12τ2
{(xt − ϕxt−1)2 + (xt+1 − ϕxt)2 +
τ2
σ2(yt − x2
t )2
}.

MCMC and Likelihood-free Methods
The Metropolis-Hastings Algorithm
Extensions
Example (Noisy AR(1))
Hidden Markov chain from a regular AR(1) model,
xt+1 = ϕxt + εt+1 εt ∼ N (0, τ2)
and observablesyt|xt ∼ N (x2
t , σ2)
The distribution of xt given xt−1, xt+1 and yt is
exp−12τ2
{(xt − ϕxt−1)2 + (xt+1 − ϕxt)2 +
τ2
σ2(yt − x2
t )2
}.

MCMC and Likelihood-free Methods
The Metropolis-Hastings Algorithm
Extensions
Example (Noisy AR(1) continued)
For a Gaussian random walk with scale ω small enough, therandom walk never jumps to the other mode. But if the scale ω issufficiently large, the Markov chain explores both modes and give asatisfactory approximation of the target distribution.

MCMC and Likelihood-free Methods
The Metropolis-Hastings Algorithm
Extensions
Markov chain based on a random walk with scale ω = .1.

MCMC and Likelihood-free Methods
The Metropolis-Hastings Algorithm
Extensions
Markov chain based on a random walk with scale ω = .5.

MCMC and Likelihood-free Methods
The Metropolis-Hastings Algorithm
Extensions
MA(2)
Since the constraints on (ϑ1, ϑ2) are well-defined, use of a flatprior over the triangle as prior.Simple representation of the likelihood
library(mnormt)ma2like=function(theta){n=length(y)sigma = toeplitz(c(1 +theta[1]^2+theta[2]^2,
theta[1]+theta[1]*theta[2],theta[2],rep(0,n-3)))dmnorm(y,rep(0,n),sigma,log=TRUE)}

MCMC and Likelihood-free Methods
The Metropolis-Hastings Algorithm
Extensions
Basic RWHM for MA(2)
Algorithm 1 RW-HM-MA(2) sampler
set ω and ϑ(1)
for i = 2 to T dogenerate ϑj ∼ U(ϑ(i−1)
j − ω, ϑ(i−1)j + ω)
set p = 0 and ϑ(i) = ϑ(i−1)
if ϑ within the triangle thenp = exp(ma2like(ϑ)−ma2like(ϑ(i−1)))
end ifif U < p thenϑ(i) = ϑ
end ifend for

MCMC and Likelihood-free Methods
The Metropolis-Hastings Algorithm
Extensions
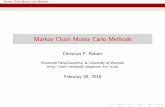
Outcome
Result with a simulated sample of 100 points and ϑ1 = 0.6,ϑ2 = 0.2 and scale ω = 0.2
● ●
−2 −1 0 1 2
−1.
0−
0.5
0.0
0.5
1.0
θ1
θ 2
●●●●
●
●●●
●●●●●
●
●●●
●● ●●●●
●●
●●●●●●●●●●
● ●●●●●●●●
●●●
●
●●●●●●●●
●●●
●●●●●●●
●●●
●●●●●●●●●●●
●
●●●●●
●
●●
●●●●
●●●●●●●
●●●●●
●●●
●●●●●●●●●
●
●
●●●●●●●●●●●●
●●
●●
●
●●●
●●●●●●●●
●●●●●●●
●●●●●
●●●●
●
●●●●●●
●●●●●●●
●●●●●
●●●
●●
●
●●●
●
●
●●
●●●
●●●
●●
●●
●●●●
●●
●
●●●
●●●
●●
●●
●●●
●●●
●●
●●
●●●●●
●●●
●●●●●●
●●●
●●●●●
●●
●●●●
●●●●
●●
●●●●●●●●
●●●●●●●●●
●●
●
●●
●
●
●●●●●●●●
●●●●●●●●
●●●
●●●●●●●●●●●●
●●●●
●●
●●●●●●●●●●●●●
●●●●
●●●
●
●●
●
●●
●●●●
●
●●
●●
●●●●●
●
●● ●●
●●●●●
●
●●●●
●●●●●●●●●
●
●●
●
●●
●●●●
●●●●
●
●●
●●
● ●●●
●●
●●●●●●●
●●●
●●●●●
●
●●●●●
●●
●●●
●●●
●
●
●
●●
●●
●●●●●●●●
●●●●●●●●●●●
●●
●●
●●●●●●●●
●●●
●
●●●●●●
●●●
●●
●●
●●●
●●●
●●
●●●●●●●
●
●●●
●●●●
●
●●●
●●
●
●●●●●●●●●●●●
●●
●●
●
●●●●
●
●●●
●●●●●
●
●●●●●●
●●
●●●●●●
●●●
●●●
●●
●●
●
●●●●
●●
●
●●●
●●●●
●●●●●●●
●
●●●●
●●●
●●
●●●●●●●●●●●
●
●●●●
●●●●
●
●●●●
●●
●●●●●●●
●
●●●●●
●●●●●●
●●
●
●
●
●
●●●
●
●●●●
●●
●●
●●●●●●●●●●●
●●●●
●
●●
●●●●
●●●●●●●●
●●
●●●
●●●●
●
●●
●●
●●
●●●
●●●●●●●
●
●
●
●●●●
●●●●
●●●●
●●●
●●
●
●●●●●
●●●●●
●●●
●●●●●
●
●
●●
●●●●
●●●●●●
●●
●●●●●●●●●●●
●
●●●
●
●
●●●
●
●●
●●
●●●
●●●
●
●
●●●●●●●●●●●●
●●●
●●●●●
●
●
●●
●
●●●●●
●
●
●●●●●
● ●
●
●●●
●●●●●●●●●●●●●●●●●●●
●●●●
●
●
●
●●
●●
●
●●
●●
●
●
●
●●●●●
●
●
●●●●●
●
●●
●
●●●
●
●●●
●
●
●
●
●
●●
●●●●
●
●●
●
●
●
●●●●●●●●●●●
●●●●●●●●●
●●●●●●●●●●●●●●
●
●●●●●●●●●●●●●●●●●●●●●●●●●●●
●●
●
●●
●●●●●●●●●
●●●●●●●●●●●●●●
●●●
●● ●
●
●
●
●●●●●●●●●
●
●●
●
●●●●
●
●
●●●
●●●●●
●
●
●
●
●●●●●●
●●
●●●
●
●●●●●●
●
●●●●●●●
●●
●
●●
●●●●●●●●●●
●
●●●●●
●●●●●
●●●●
●●●●●
●●●●●
●●
●●●●●●
●
●
●●
●
●●●●
●●●
●●
●●●●
●●●
●●
●●
●
●● ●●●●
●●●
●
●●
●
●
●●
●
●●●●
●●●●●●●●●●●●●●●●●
●●●
●
●●
●●●
●●●
●●●●
●●●●
●●●
●●●●●●
●●
●●●●
●●●●●
●●●
●
●●
●●●●●●●
●
●●
●●●
●●●●
●●
●●
●
●●
●●●●
●●
●●
●●●●
●●●●●●●●●
●●●●●●●●●●
●●
●
●●
●●●●●●●
●●●
●●
●●●
●
●●
●●
●●●●●
●●
●
●
●
●●●●
●●●●●●●●
●●●
●●
●
●
●●●●●
●●
●●●●
●
●●●●●●●●
●●●
●●
●●●●
●●
●●
●
●●●●●●●
●●●
●●
●
●●●
●
●●
●
●●●
●
●
●
●●
●●
●●●●●●
●●●●●
●●
●●●●
●●●●
●●●●
●
●
●●●
●
●
●●●●●
●
●●●
●●
●
●●● ●
●●●
●
●●●
●●●
●
●●●●●●
●
●
●●●
●
●●●
●
●●●●
●●
●●●
●
●●
●●
●
●●●●●
●
●
●●●
●●●●
●●●
●●●
●●●●●●●●●●
●●●●●
●
●
●
●●●●
●●●●●●●●●●●●●●●●●●
●●●
●●
●●
●
●●●●●
●●●
●●●
●●●
●●●●●
●
●●●●●●●●●●●●
●
●●
●●●●●●●●●
●●●●●
●●●●●●●
●●
●●●●
●
●●●●
●
●●
●
●●
●
●
●
●●●
●
●
●●
●●●●●●
●
●
●
●
●●
●●●●●
●●●
●●
●●●●●
●●●●●●●
●
●●
●●●●●●●●●
●●●●●●●●
●●
●●●●●
●●
●●●●●●
●●●●●●●●●●●●●●
●●●
●●●●●●●● ●●
●●●
●●●●●●●●●
●
●
●
●
●
●●●
●●
●● ●●●
●
●
●●
●
●●
●
●●●●●
●●●●
●●●● ●
●
●
●
●●
●
●●●
●
●●●●●●
●
● ●
●●●●●●●●●
●●● ●●●●●
●●●●●●●●●●
●
●
●● ●●●●
●
●●●●
●●
●●
●●●●●
●●
●
●
●
●
●
●●●
●●
●●●●
●●
● ● ●
●●●●
●●●
●
●●●●
●●
●
●●
●●
●●●●●
●
●●
●
●
●
●●●
●●●●●●
●
●
●●●●●●●●●●●●●● ●●
●●
●●
●●●●
●●●●●●●●
●●●
●●
●●
●●●●●●●
●
●●●
● ●●
●
●●
●
●●
●●●●●●●●●●●●●
●●
●
●
●●●●●●●●●●
●●●
●●●
●●●●●●
●●
●●
●●●●●●●
●●●●●●●●●●●●●
●
●●●●
●●
●●
●
●●
●
●
●●●●
●●
●
●
●●●●
●
●●●●
●●
●●●●
●●
●●
●
●
●●●●●
●
●●
●●●●●●●●
●
●●●●●●●●
●
●●
●●●●●●●
●●●●●
●●●●
●●●●●
●●●
●
●●●●●
●●●●●●●
●●●●●
●
●●●●
●●
●●●●●●●●
●●●●●●●
●●●●
●●●●
●
●●●●
●●●
●
●●
●●●
●
●●●●●
●●●●●●●●●●●●●●●●●●
●
●●●●●●●●●
●●●●●●●●●●
●●●
●
●
●●●
●
●
●
●●●
●●
●●●●●●●●●
●●●●
●●
●●●
●●●●
●●●
●●
●
●●
●●●●●●●●●
●
●●
●
●●●●●●
●
●●●●●●
●●●●●●●●●●●●●●
●●●●
●
●●●●●●●
●●●●●●
●●●
●
●●
●
●
●●
●
●
●●
●●●●
●
●
●●●
●●●
●
●
●●●●●●●
●
●
●●●●●●●●●
●●●
●●
●●●●●●
●●●●
●●●●●
●●
●●●
●
●●●
●
●●●●●
●
●●●●
●●
●
●●●
●●●
●●●
●
●●●
●
●●●●
●●
●
●●●●
●
●●●●●
●●
●●
●● ●
●
●●
●●●
●●●●●●
●●
●●●
●
●●
●
●
●●●●●
●
●●●●●●●●●●●●●●
●●●●●
●●●
●
●●●
●●●●●●●
●
●●
●
●●
●●●
●●●
●
●
●●
●●
●●
●●●●
●
●●●●●●●
●●●● ●
●●●●
●●
●●●●
●
●
●●
●●●
●●●
●●●
●●●●●
●●
●●
●
●●
●
●●●
●●●●●
●●●
●●
●
●
●●
●●
●
●
●
●●
●●●●
●
●●
●
●●
●
●●●●●
●
●●●●●●●●●
●●
●
●●●
●●
●●●●●●●●●●●
●
●●●
●●●●
●
●●●●
●●●●●●●●●
●
●
●●
●
●
●●●●
●●●●●●
●●
●●
●
●●
●●●●●●●●●●●
●●
●●
●●
●●●●
●●
●
●●●
●●
●●
●●
●●
●●●
●●
●●●●
●●
●
●●
●●●●●●
●●●●●●
●
●●● ●●●
●●● ●●
●●●●●●●●●●●●●●●●●●●●
●
●
●
●●●
●
●●●●●●
●●
●
●
●●●●
●●
●
●●●●
●
●●
●●●●
●●
●●
●●●●●●●●●
●
●
●●●●
●
●●● ●●●
●●●●
●
●●●●●●
●●●●●●
●●●●●
●●●●●●● ●
●●●●
●●●●●●●
●●
●
●
●●●●●●●
●●●●●
●
●●●
●
●
●●●●●●
●●●
●●● ●
●●
●●
●●
●●●●●
●●●●●●●●●●●●
●
●●●
●●●
●●●
●
●●●
●●●
●●
●●●●●●●●
●●
●●●●●●
●
●●●●●
●●
●●
●
●●●●
●●●●
●
●●●●●
●
●
●
●●●●
●
●●
●
●●●●●
●
●●●
●
●●●●●●●●●●
●●
●●
●
●
●
●●●
●
●
●●
●
●●
●●●
●
●●●●
●●●●●●
●●●
●●●●
●●●●●●●●●
●●●●
●
●●●●
●●●●
●
●●●
●●●●●
●●●●
●
●
●●
●●●●●●●
●
●
●●●
● ●●●●
●●●●●●●●●
●
●●●
●●
●●●●
●●
●●●
●●●
●●●●
●●
●●●●
●
●
●●●
●
●●●●●●
●●●●●●
●●●
●●●●●●●●●●●●●
●● ●
●●
●●●●●●●●●●●●●
●●●●
●
●
●●
●●●●
●●●
●●●●
●●●
●●●●●
●●
●●
●
●●
●●
●●●
●●●●●
●
●●●●●●●●●●●●●●●●●
●
●●
●●●
●
●●
●●●●●●●●
●
●●●●●●
●●
●●
●●
●
●●●●●●●●●●●
●
●●●●●●●
●●
●●●●●●
●●●●●●
●
●
●●●●●●
●●
●●●●●
●
●●●
●●
●●●●●
●●●●●●●
●●
●●●
●
●
●
●●
●●
●●●●●●●
●●●●
●
●
●●●●●
●
●●●
●
●
●●●
●●
●●●●
●●●●●●●
●●●
●●● ●●●●●●
●
●●
●●●
●●●●●●
●●
●
●
●
●●●●●●●●●●
●●●●●●
●
●
●●●
●●●●●●
●●●●●●
●●●●●●●●
●●
●●●
●●
●●●●●●●
●●●●
●●●●●
●●
●●●●●●●●
●●●●
●
●●●
●●●● ●●●●●●●●●●●●●●●
●●●●
●●
●●●●●
●●●●●
●●
●
●●●●●●●●
●●
●●●
●●●●●●
●●
●●
●
●●
●●●●●
●●●●●●●●
●
●●●●●●●
●●
●●●
●
●●
●●●●●●●●●●
●
●●
●●●●●
●●●
●●●
●
●●
●
●
●●
●
●●
●●
●●●●
●
●●●●●●
●●●
●●●●
●●●●●●●
●●●●●●
●
●●●
●●●
●●●●●
●●
●●●●
●●●●●
●●
●●
●●●
●
●●●
●
●●
●●
●●
●
●
●●
●
●●●●●
●
●●
●●
●
●●●●●●●●
●●●●●
●●●●●
●●●
●●●●●●●●●●●●●●●●●●●
●●●
●●●●●●
●●
●
●●
●●●
●
●
●
●●●
●●●●
●●●
●
●●●●●
●
●●
●●
●●
●
●●●●●
●●
●
●
●
●
●●●●
●
●
●●
●
●●
●●●●
●●●●●
●●
● ●
●●
●
●●●●●●●●●●●●
●●●
●●
●●●●●●
●
●
●●
●●
●●●●●●●●●
●●
●
●
●●
●
●●
●●●●●●
●●
●●●●●●●●
●
●●
●
●
●
●●●
●●
●
●
●●●
●●
●●●
●●
●●●
●●●
●
●
●●●
●●●●●
●●●●●●
●●●●●●
●●
●●●●●●●
●
●●
●●●●
●●●●●●
●●●●●●●
●●
●
●
●●
●●●
●
●●
●
●●●
●
●● ●●
●
●●●●●●
●●●●●●●●●●●
● ●●●●
●●
●
●●●●
●●●
●●
●●●●
●
●●
●●
●
●●
●●●
●
●●●
●●●●●●●●●●●●●●●
●●●●●
●●●●
●●●●●● ●●●●●●●●●
●●●
●
●●
●●
●●
●●
●
●
●●●●●●
●
●
●
●●
●●●●
●●●●●
●●●●●●●●●●
●●●●●●●●●●
●●●●
●
●●
●●
●
●●●●
●●
●
●
●●●●●
●●
●●●
●●
●●
●●●
●
●
●●
●●●●●●●●●
●
●●●●
●●●
●
●●●
●●
●●●●●
●●●●●●●●●●●●●●● ●● ●●
●●●
●●●●●
●●
●
●
●
●●●●
●●
●●●●●
●●
●●●
●●●●●●●●●
●●
●
●
●
●
●●●
●●●●●
●
●
●●
●●●●●
●●●●
●●●●●
●
●●
●●●●●
●●
●●●
●
●
●●●●●●●●●●●●●●
●●●●
●●●●●
●●
●●●
●●●
●●●●
●●
●●●●●
●
●
●
●●
●●●
●●●●●
●●●●●
●●●●●●●●
●●
●
●●●●●
●
●●●●●●●●●●●●●●
●●
●●
●
●
●
●●
●
●
●●●●●
●●●●●●●
●
●●
●●
●●●●●●●
●
●●●●●●●●●●
●
●
●●●
●●
●●●
●●●●●●●●●●●●●●●●●●●
●●●
●
●●●●●
●●●●
●●
●●
●●●●
●●
●
●●
●
●
●●●●
●
●●●●●●
●●●●●●●●
●●●
●●
●●
●●
●●
●●
●
●●
●
●
●
●●●●
●
●●
●●●
●●●
●●
●●
●
●
●●
●●●
●●●●●●●●●●●●
●
●
●●●
●●●●●
●●
●
●●
●
●●●
●
●●
●●
●
●
●●●●●
●●●●●
●●●●●
●
●
●●●
●
●●
●
●
●
●
●●●
●●
●
●●●●
●
●
●●●●
●●●●●●
●●●
●●
●●●●
●
●●
●
●
●●
●
●●●●
●
●
●
●●●
●●●●
●●●
●●●●
●●
●
●●●
●●
●●●●●●●●●
●●
●●●●●●
●●●●
●
●●●
●
●
●
●
●●●●●●●
●●●●
●●●●●
●
●●●●●
●●●●●●●●●●●●●●
●●●
●
●●
●●●●●●●●●
●●●
●●●
●●
●
●●●●
●●●●●
●●●
●●●●●●●
●●
●●
●●●●
●●
●●●●●●
●●●
●●●
●●●
●●●●●
●
●●●
●●●●
●●●●
●●●●
●●●●●●●●●
●●
●
●
●●●●
●●
●
●●●●
●●
●●●●●
●●●
●
●●●●●
●
●●●●●●
●
●
●
●●●●
●
●
●●●
●●●●●
●
●
●●●● ●●
●●●●
●●
●
●●
●●●●
●●
●●●●●●●●
●
●●●●
● ●●●●
●●
●●●●●●●●●●
●●●
●
●●●●●
●●
●●
●
●●●●●●
●●●
●●●●●●
●●●●
●●●
●●●●●
●
●●●
●●● ●
●●
●●
●
●●
●●
●
●
●
●●●
●●●●●●●●
●●
●●●●
●●●●● ●●
●●
●
●●●
●●
●
●
●●●●
●●●
●●●●●●
●●●●●●
●●
●
●●●●
●●●●●●●
●●
●
●
●●●●
●●●●
●
●
●●●●●
●
●●●●
●●
●●●
●
●●
●●●●●●●●●●●●●●●
●●●●●●
●●
●●●
●●●●●●●●
●●●●
●●
●●●●
●
●●●●●●●
●
●●●●●●●
●
●●●
●
●●●●
●●●
●
●
●
●●●●
●●
●●●●●●●●●●●●●●●●
● ●●●●●●
●●
●●●
●
●●
●
●●●●
●
●●
●●●●●
●●
●●●●●●●●●●●
●
●
●●
●
●●●●
●●●
●●●●●
●●
●●●●●●●●●●
●●
●●●●●●●
●
●●
●●●●●●
●
●●●●●
●
●●●
●
●
●●
●
●●●
●●
●●
●
●
●
●●
●
●●●
●●●
●
●●
●●●●●
●
●●●
●●●
●
●●●●●●●
●
●●●
●
●
●●●●●
●
●●●●●●●
●●●●
●●●
●●●●●
●●●●●
●
●●●●●●●●●●●
●●●
●
●●●●●
●●●●●●
●●●
●●●●●●
●●●●●●●●●●
●
●
●
●
●●●
●●
●●●●●●●●●
●●●
●
●●●●●●
●
●
●
●●●●
●●
●●
●●●●●●●●
●
●
●
●●
●●
●
●●●
●●●●●●●
●
●●●●●●●●●●●●●
●●●●●●●●
●
●●●
●●
●●●
●●●
●
●
●●
●●●●●●
●
●●●●●●●●
●
●
●
●●
●●●●
●●●
●●●●●●●●
●
●●●
●
●
●●
●●●●●●●●
●●●● ●
●
●●●
●●●●●●●●
●●●●●
●
●●●●●
●
●●●
●
●●●
●
●
●●
●
●●●●●●
●●
●●●●●
●●●
●●●●
●●●●●●●
●●
●●●●
●●●
●●●
●●
●
●●●●●
●●●●●●●
●●●●●●
●●●●●●
●●
●●●●
●
●
●●●●●●●●● ●●●●
●●●●●●
●
●
●●
●●
●
●●●●
●●●
●
●
●●
●●
●
●●●●●●●
●
●●●●●●
●
●●●●●●●
●●●
●●●●●●
●
●●●●●●●●●
●●●
●●●
●
●●●●
●●●●●●
●●●●●●
●● ●
●●●●●
●●●
●
●●
●●
●●●●
●●
●●●●●●● ●
●
●
●
●
●●●●
●
●●●●●●●
●●●
●●
●●●●●
●
●●●●●●●
●●●●●
●●●
●●
●●● ●●●●●
●●●●●●●●
●●●
●
●●●
●●●●●●●●●●●
●
●●●●●
●●●●●●●●●
●●●●
●●●
●●
●●●●●●●●●●●●
●●●●●●●●●●
●●●●●
●●
●●●● ●●
●●●
●
●
●
●●
●●●●●
●●●●●●●●●●
●
●●●
●●●
●●●● ●●
●●●●
●●●●
●●
●●●●
●●●
●●●
●●
●●●
●●●●●
●●●●●●
●●
●●●●●●●●●●●●●
●●
●●
●●●●
●
●
●●●●●●
●
●
●●
●●●●●●
●●●●●●
●●●●●
● ●●●
●●●●●
●
●●●●●
●●
●●●●
●
●●●●
●●●●
●●
●
●●●●●●●
●●
●
●
●●●●
●
●●●●●
●●●●●
●●●●●●
●
●
●●●
●●
●●●
●●●●●●●
●●●
●
●
●●●●●●●●
●
●●●●●
●●●
●●
●●●●●●●●●●
●●
●
●●●●
●
●●●●●●●●
●●
●●●●
●●●
●●
●●●
●●●●
●●●●●●●●●●
●●●
●●●●
●●●●●
●●●
●●●●● ●
●
●
●●●●
●
●●●●●●●
●
●
●●
●
●●●●●
●●●
●●
●●
●●
●
●●●
●●
●
●●●●●●●
●●●●
●●●
●●●
●
●
●●●
●
●
●●
●●●●●
●
●●●●●●●
●●●●●●
●●●●●●●
●●●●●●●●
●●
●●●
●●
●
●●●●
●
●●●●
●●
●●●●
●
●●
●
●
●●●●●●
●
●●
●
●
●
●
●
●●
●
●
●●●●●
●
●
●●
● ●●●●
●●
●
●●●
●●●●
●●●
●●
●●●
●●●●●●●●●●
●
●●●
●●●
●●●●
●
●●●●●●
●
●
●●●●●●●
●●●
●●●●●●●
●●●●●
●●●
●●
●
●●●●●●●●●●
●●●●●
●
●●
●●●●
●
●
●●●●●
●●
●●●●
●●●●●●
●●
●●●●
●
●●●●●●●●
●●
●●●●●
●●
●● ●
●
●
●●
●●●●●
●
●
●●●●●●●●●●●
●
●
●
●●●
●●●●●
●●
●
●●●●
●●●
●●●●●●●●●●●
●
●
●●●●
●
●●●●
●●
●●
●●
●●
●●●●●●
●●
●
●●●●●
●●●●
●●●●
●
●●●●●●●●● ●●
●●●
●●
●
●●
●●●●●●●●●
●
●●●
●●●
●●●●
●●●
●●●●
●●●●●
●●●●
●
●●●●
●
●
●
●●●●●●●●●
●●●
●●
●
●
●
●
●●
●●●●●
●
●●●●●
●
●●●
●●●●● ●
●
●●
●●
●●
●●
●●●●
●
●
●●
●●●●
●●
●
●●
●
●●●●●●●●●●●
●●●●●●●
●●●●●
●●
●●
●●●
●●●●
●●●●
●
●
●●●
●
●●●
●
●●
●
●●●●●●
●●●
●●
●●●●●●●●●●
●●●
●●
●●
●●
●●
●●●●
●
●●
●
●●●
●
●●●●
●
●
●●
●●●●●
●●●●●●
●●●●●●
●●● ●
●●●●
●
●●
●●
●
●
●●●
●
●●
●●●●●●
●
●●●●●●
●
●
●
●●●●●●●
●●
●
●
●●
●●●●●●●●●●●●●●●●●●
●
●●
●●●
●●
●●●
●●
●●●
●●
●●●● ●●●●●
●●●●●●●●
●●●
●●●●●●
●●●
●●●●●
●●●●●
● ●●●●●
●●●
●
●
●
●●●●●●
●●
●
●
●●
●●
● ●●●●●
●●
●●
●●●●●●●
●●●●●●
●●●
●●
●●
●●●
● ●●●●●●●
●●●●●●●●●●
●
●●●●●●●●●
●
●●
●●●●●
●●●●●●
●●
●●●
●●●●●●
●●●●●● ●●●●●●
●
●●
●●●●
●●●●●●●●
●
●
●
●●●●●●●
●●
●
●
●●
●●●●
●●●●● ●●●
●●●●●●●
●
●●●●●
●●●●●●●
●●
●●
●●
●●●●
●●●
●
● ●●●●●
●●
●
●
●●●●●●
●●●
●●●●
●
●●●
●●
●●
●●
●●●●●
●●
●●
●
●●●●
●●
●●●●● ●●●●●●●●
●●
●●
●●●●
●
●
●●
●●●
●●●●
●●●●●●
●●●●●
●●●●
●●●●●●●
●
●●●
●●
●
●●●
●
●●●
●●●●●●●●●●●●●●●●●●
●●●
●
●●●●●●●
●●●●
●●●●●●●●●●●●●●●●
●●●
●
●●●●●
●●●●
●●
●
●
●●
●●●●
●
●●
●●●●●●●
●●●
●●●●●●●●
●
●
●●●●●
●
●●
●
●●●
●●
●●●●●●
●
●●●●●
●
●●●
●●●
●●●
●●
●
●●
●
●
●●
●●●●●●●
●
●●●●●●●●
●
●
●
●●●●
●
●
●
●
●●●
●●●●
●●
●
●●●●●●●●
●●●●●●●●
●●
●●●
●●
●
●●●●●
●●●
●●●
●
●●●●
●●●●
●●●●●●
●●●●●
●●●
●
●
●●●
●●●●●●●
●
●●●
●●●●
●●●
●●
●●●●●●●
●
●
●●●●●●●●●●
●●
●●●
●●●●●●●
●●●●
●●
●●
●
●●
●●●●●●●
●●●●
●●
●●●
●●●●●●●
●●●●●
●●●●●●
●
●●
●●●●●●●
●●
●
●
●●●
●●●●●●●
●●●●●
●●●●
●
●
●
●●
●●●●
●●
●
●
●●
●●●
●●
●●●●●●
●●●
●
●●●
●●●●●
●●
●
●●●●●●●●●●
●●●
●●●●●●●●●●●●●
●
●●
●●●●●
●●
●
●●
●
●●●
●
●●●●●●●●
●●
●●●●●●●●
●●●●●●●●●●●●●●●●
●
●●●
●●●●●
●
●●●●●●
●
●
●●
●●●●
●●
●
●●●●●
●●●●
●●●●●
●
●
●●●●
●●
●
●●●
●●
●●
●●
●●
●
●●
●●●●●●
●
●
●●
●●
●●●●
●●●
●
●●●
●●●●●
●
●●
●
●●●●
●
●●
●●●●●
●
●
●●●
●
●
●●●
●●●●●
●●●●●●●●●●●●●
●
●
●●●
●●●
●●
●●●●●
●●●●
●
●●
●●
●●●
●
●
●
●
●●
●●●●●●●●●●
●●●●
●
●●
●●●●●●●
● ●●
●
●●
●
●●
●●●●
●●
●●●●●
●●●
●●●●●●●●●
●●●●●●●●●●
●
●
●
●●
●●●●●●● ●●●●
●●●
●●●●●●
●
●●●●
●●
●●●●●●
●●●●●
●
●●
●
●
●●●●
●●●
● ●●●●●●●●●●●
●●
●●
●●●●●
●
●●
●
●●●●
●●
●●●●●●●
●●
●●●
●●●●
●●
●
●
●
●●●●●
●●●
●●●
●●●●●●●●●●●
●●●●●●
●●●●●●●●
●●
●●
●●
●●●●●●
●●●
●●●
●●
●●●●
●●●●●●●●●●●
●●●●●●●●
●
●●●
●
●
●●●
●●●●●●●●
●●●
●
●●
●●
●●●●●
●●●●
●●●●●
●
●●●●
●●●●●●●●●●●
●●
●●●●
●
●●
●
●●●
●
●
●
●●●●●●
●●
●●●
●
●
●
●
●
●
●●●●●
●
●●
●●●●●●●●●
●●
●
●●●
●●●●●
●●●●●●●●●●
●●
●●●●●
●●●●
●●●●
●
●●●
●●
●●
●●●●●●●●●●●
●●●
●●●●●●●
●●●●●●
●●
●●
●●●●●●●●●
●●●●●
●
●●●●●●
●
●●●●●●●●●●●●
●●●●●
●
●●
●●
●●●●●●●
●●●●●●●●●
●●
●
●●
●
●●
●
●
●●
●
●
●
●●●●●●●●●
●●
●
●●●●
●●●●
●
●●●●
●●
●●●●●●●●●●●●
●●
●●●●●●
●
●●●●●●●●
●●●●
●
●●●●●●
●●
●
●●●●
●
●●
●●●●●●●●
●●●
●●●●
●●
●●
●
●
●
●
●●
●●●
●●●
●
●●●●●●●
●●●●●
●●
●
●
●●●●●●
●●●
●
●
●●●●●
●●
●●
●
●●●●●
●●
●
●●
●
●
●●●
●●●
●●
●●●
●●●●●●●●●
●
●●●●●
●●●●●●●●●●●●●
●●●
●
●●
●●●●●●●●
●
●●●
●●●
●●●●●
●
●●●
●●
●●●●●●
●●●●●●●●
●
●●●●
●●
●●
●
●●
●
●●●●●●●●
●●●
●●●●●●●●●
●●
●●●●●
●●●●
●
●
●●●●●
●●●●●●●
●
●●●
●●●●
●
●●
●
●●
●
●●●●●●●●●●●●
●●●●●
●
●
●
●●●●●●●
●
●●●●
●●●●
●
●●
●
●●●●
●●●●●●
●
●
●
●●
●●●●
●●
●●
●●●●●
●●
●
●
●
●●●●
●●●●●●●
●●●●●
●●●●●●●
●
●●●
●●●
●
●●
●●●
●●●
●●●●●
●
●●●
●
●
●
● ●●
●●●●●●●
●●●●●
●
●
●●●●
●●●●
●
●●●
●
●
●●●●
●
●●● ●
●●●●●●●
●●●●
●●●●●
●
●●
●●
●●●
●
●
●●●●
●
●●
●●
●
●
●
●●
●●
●●●●●
●●
●
●●
●
●●
●●●
●●●●
●●●
●●●●●●●●●●●●●
●
●●●●●●●●●●●●●
●
●●●
●●●●●●●●●●●●●
●
●
●●●
●
●●●●
●●●
●●
●●
●●
●●
●
●
●●●
●
●●●●
●●●●●●
●
●
●●●●●●
●●
●●
●
●
●●●●●●
●●●●●●●
●
●
●●
●●●
●●●
●●●●●●●●●●●●●●
●●●●●
●●●●●●●●
●●●●
●●
●
●●●●●●●●
●
●●
●●●●●●
●
●●
●
●●
●
●
●●
●●●●
●
●
●
●●
●●●●
●●●●
●●●●●
●
●●●
●
●●●●●●●
●●●●
●
●●●●●●●● ●●
●
●
●●●
●●
●●●●●
●●●●●●●
●●
●●●●●●
●●●
●●
●
●
●●●●●●
●
●●●●●●
●●●●●●●●●
●
●●
●
●●●●●
●
●
●●●●●●●
●●●●●
●
●●
●●●
●●●
●
●●
●●
●●
●●●
●●●●
●●●
●●●
●●●
●●●●●
●●
●●
●●
●
●●
●●●
●
●
●
●●●●●●●●
●●●
●
●●●●●●●●●●
●●
●●●●●
●●●●●
●●
●●
●●●
●●●
●
●
●
●
●●
●
●●●●●●●●
●●●
●
●●●
●
●●●●●●●●●●●●●
●
●●
●●●●●
●●
●●●●●●●●●●
●●●
●●●●
●●●●●●
●●
●●●●●●●●●
●
●
●●●
●
●●
●●
●●●●●●● ●●●●●
●
●●●● ●●
●
●●
●
●
●
● ●●●●
●●●
●
●
●●●●
●
●
●
●●
●●●●
●●●
●●●●
●●●●●●●●●●●●●●
●●●
●
●●●
●●
●●
●●●●●
●●●●●●●●●●
●●●●●●●●●●●●●
●●●
●●
●●●●●●
●●●●●●
●●●●●●
●●
● ●● ●
●●
●●●●●
●
●●●●●
●●
●●
●●●●●●●●●●●●●
●●
●
●●
●●●●●●● ●●●
●●●●
●●●
●●●●●
●
●
●●●●●●●●
●
●
●●
●
●●
●●●
●●●
●●●●●●●
●●●●●●●●
●●●●
●●●●
●
●
●●●●●●●●●●
●●●●●●
●●●●●●
●●
●
●
●●
●
● ●●
●●●●●●●●●●●●●●
●●
●●●
●

MCMC and Likelihood-free Methods
The Metropolis-Hastings Algorithm
Extensions
Outcome
Result with a simulated sample of 100 points and ϑ1 = 0.6,ϑ2 = 0.2 and scale ω = 0.5
● ●
−2 −1 0 1 2
−1.
0−
0.5
0.0
0.5
1.0
θ1
θ 2
●●●●●●●
●●●●
●●●●●
●●
●●●
●
●
●
●●●●●●●●●●●●●●●●●●●●●
●●
●●●●●●●●●
●●●●●●●●●●●●●
●●
●●●●●●●●●
●
●●
●
●
●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●
●●●●●●●●●●●
●●●●●●●●●●●●●●●
●●●●●●●
●●●●●●●●●
●●●●●●
●●●●
●●●
●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●
●●●●
●●●●●●●●●●
●
●●●●●●●●●●
●●●●●●
●●●●
●
●●●●●●●●
●●●
●●●●●●●●●●
●●●●●●
●●●●●●●●●●●●●●
●●●
●
●●
●●●●●●●●●●●●●●●●
●●●●
●●●●●
●●
●●●
●●●●●●●●
●●●●●●●●●
●●●●●●●●●●●●●●●●●●●●
●●●●●●●●●●
●●●●●
●
●●●●●●●●●●●●●●●●●●●
●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●
●●●●●●●●●●●●●●●●●●●●●●
●●●●●●●●●●●●●●●●●
●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●
●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●
●●●●●●●●●●
●●●●●●●●●●●●●
●●●●●●●●●●
●●●●●●
●●●●●
●●●●●●
●●●●●●●●●
●●●●●●●●●●●●●●●●●●●●
●●●●●●●●●●●●●●●●●●●●●●●●●
●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●
●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●
●●●
●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●
●●●●●●●●●
●●●●●●●
●●●
●●●●●●●●●●●●●●
●●●●●●
●●●●●●
●●●●●●●●●●●●●●●●●●
●●●●●●●●●●●●●●●●
●
●●●●●●●●●
●●●●●●
●
●●●●●●●●●●●
●●●●●●●●●●
●●●
●●●●●●●●●●●●●●●●
●●●
●●●●
●●●
●●●●●●●●●●●●●●●●●●●●●●●●●●●
●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●
●
●
●●
●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●
●●●●●●●●●●●
●●●●●●●●●●●
●●●●●●●●●
●●●●
●●●●●●
●●●
●●●●●
●●●●●●●●●●
●●●●●●●●●●●●●●●●●●●●●●●●●●●●
●●●●
●●●●
●●●●●●
●●●●●
●●●●●
●
●●
●●●●●●●●
●
●●●●●●●
●●
●●●●●●●●●●●●●
●●
●●●
●●●●●●●●●●●●●●●●●●●●
●●●●●●●●●●
●●●
●●●●●●
●●●
●●●●●●●●●●●●●●●●●●●●●●●●●●●●
●●●●●●●●●●●
●●●●●●●●●●●●●●●●●●●●●
●●●●●
●●
●●●
●
●●●●●●●
●●●●●●●●●●●●●●●
●●●●
●
●●●●
●
●●●●●
●●●●●●●●●●
●●
●●●●
●
●●●●●●
●●●
●●●
●
●●●●●
●●●●●●●●●●●●●●●●
●●●●
●●●●●●
●●
●●●●●●●●●
●●●●●●●●●●●●●●●●●●●●●●●●●●
●●●●●
●●
●
●
●●●
●●●●●●●●●●●●●
●●●●●●
●●●●●
●●●●●●
●●●
●●●●●●●
●●●●
●●●●●●●●●●●●●●●●●●●
●●●●
●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●
●●●●●●
●●●●●●●●●
●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●
●●●●●●
●
●●●●●●●●●●●●●●●●●●
●●●●●
●●●●●●●●●●
●●●●●●●●●●●●●●●●●
●
●●
●●●●
●●●●●●●●
●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●
●●●●●●●●●●●●●●●
●●
●●●●●●●●●●
●●
●●●●●●
●●
●●●●●●●●●●●
●●
●●●●●
●●●●
●
●●●
●●●
●●●●●●●●●●●●●●●●●●●
●●●●●●●●●●●●●●●●●●●●●
●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●
●
●●●●
●
●●●●●●●●●●●●●●●
●●●●●●●
●●●●●●●●●
●●●●●●●●●●
●●●●●●●●●●●●●●●●●●●●●●
●●●
●●●●●●●●●●●●●●●●●●●●●●●●●●●●
●●●●●●●●●●●●●
●●●●●
●●●●●●●●●●●●●●
●●●●
●●●●●●●●●●●●●●●●●●●●●●●●
●●
●●●●
●●●
●●●●●
●●●●●●●●●●●●●●
●●
●●●●
●●●
●●●
●●●●●●●●●●●●●●●●●●●●●●●
●●●●●●●●●●●●●●●●●●●●●●●●●●
●●●
●●●●●●●
●●●●●●●●●●●●●●●
●●●
●
●
● ●●●●●●●●
●●●●●●●
●●●●●●●●●●●
●●●●●
●●●●●●●●
●●
●
●●●●●
●●●●●●
●●●●●●●●●●
●●●●●●●●●
●●●●●●●●
●●●●●●●
●●●
●●●●●●●●
●●●●●●●●●●●●●
●●●●●●●●●●●●●●●
●●●
●●●●●●
●●●●●●●●●●●●●●●●●●●●●
●●●
●●●●●●●●
●●●●●●●●●●●●●
●●●●●●●●●
●●●●●●●●●●●●●●
●●●
●
●●
●●●
●
●●●●●●●●●●●●●●●●●
●●●●●●●●●●●●●●●●
●●●●●●●●●●●●●●●●●●●●●
●●●●●●
●●●●
●●●●●●
●●●
●●●●●●●
●●●●●
●●●●●●●●●●
●●●●●●●●●●●●●●●●●●●●
●
●●●●●●●●●●●●●●●●● ●●●●
●●●●●●●●●●
●●●●●●●
●●
●●●●
●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●
●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●
●●●●●●●●●●●●●●●●●●●●●●●●●●●
●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●
●●●●●●●●
●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●
●●●
●●●
●●●●●●●●●●●
●●●●●
●●●●●●●●
●●●
●●●●●●●
●●
●●●●
●●●●●
●●●●●●●
●●●●●●●●●●●●●●●●●●●●●●●●●●●
●●●●●●●●
●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●
●●●●●●●●●●●●●●●●●●●●●●
●●●●●●●●●●●●●●●●
●● ●●●
●●●●●
●●●●●●●●●●●
●
●●●●●●●
●●●●●●●●●●●●●
●●●
●●●
●●●●●●●●
●●
●●●●
●●●●●●●●●●●●●●●●●●●●●●●●●●●
●●●●●●●●●●●●●
●●●●●●●●●
●●
●●
●●●●
●●●●●●●●●●●●●
●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●
●●●●●●●●●●●●●●●●●
●●
●●●●●●●●●●●●●●●●●●●●●●●●
●●●●●
●●●●●●●●●●●●●●●●●●
●●●●
●
●●●●●
●
●●●●●●●●●●●●●●●●●●●●●●●●●●
●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●
●
●●
●
●●●●●●
●●●●●
●●
●●●
●
●●●●●●●
●●●
●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●
●●●●●●●●●●●●●●●●●●●
●
●●●
●●●●●●●●●●●●●●
●●●●●●●●●●●●●●●●●●●●
●●●●●●●●●
●
●●●
●●●●●●●
●●●●●●●●●●●●●●●●●●●●●●
●●●●●●●●●●●●●●●●●
●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●
●●●●●●●●●●●●●●●●
●●
●
●●●●●●●●●●●●●●●●
●●●●●●●●●●●●●●●●●●●●●●●●●
●●●●●●●●●●●●●●●
●●●●●
●●●
●●●●●●●●●●●●●
●●●●●●●●●●●●●●●●●
●●●●
●
●●●●
●
●●●●●●●●●●●●●
●●●●●●●●●●●●●●●●●●●
●●●●●●●●●
●●●●●●●●●●●
●●●●●●●●●●●●●●●
●
●●●●●●●
●●●●●●●●●●●●
●●●
●●●●●●●●●●●●
●●●●●●●●●●●●
●●●●●●●●●●●
●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●
●●
●●●●●●●●●●●●●●●●●●●●●
●●●●●●●●●●●●●●●●●●●●●
●●●●●
●●●●●
●
●●●●●
●●●
●●●●●
●●●●●●
●●●●●●●●●●●●●
●●●●●●●
●●
●●●●●●●●●●●
●●●●●
●●●●●●●●
●●●●●
●●●●●●●●●●●●●●
●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●
●●●●●●●●●●●●●●●
●●●●●●●●●●●●●●●●●●●●
●
●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●
●●●●●●
●●●●
●
●●●
●●●●●●●●●●
●
●●
●●●●●●●●●●
●●
●●●●●●●●●●●●●●
●●
●●●●●●●●●●●●●●●●●
●●●
●
●●●●●
●●●●
●●●●
●●
●
●
●
●●●●●●●●
●●●●●●
●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●
●●
●
●●●●●●●●●●●●●●●●●●●●●●●●●●●●●
●●●●●●●
●●●●
●●●●●●●●●
●●
●●
●●●●
●
●●●
●●●●●●●
●●●●●
●●●
●●●
●●●●●●●●●●●
●●●●●●●●●●●●●●●●●●●●●●●●●●●●●
●●●●
●●●●●●●●
●●●●●●●●●●●●●
●●●●
●●
●●●
●●●●
●●●●●●
●●●●●●●●●●●●●●●●●●●●●●
●●●●●●●●●●●●●●●●
●●●●●●●●●●●●●●●●●●●
●●●●●●●●●●●●
●●●●●●●
●●●
●●
●●●●
●●●
●●●●●●●●●●●●●
●●●●●●●
●●
●●●●●●
●●●●●●●
●●●●●●●●●●●●● ●
●●●●●●●●
●●●●●●●●●●●●●●●●●
●●●
●
●●
●●●●●●●●
●●●●●●●
●●●●●●●●●●●●
●●●●●●●●●●●●●●●●●●
●●●●
●
●●●●●●●●●●●●●●●●●●
●●●
●●●
●●●●
●●●●●
●●●●●●●●●●●●●●●●●●●●
●●●
●●
●●●●●●
●●●
●
●●
●●●●
●●●●●
●●●
●●●●●●●●●●●
●●
●●●●●●●●●●●●●●
●●●●●●●●●●●●●●●●
●●
●
●●●●●
●●●●
●●
●●●●●
●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●
●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●
●●●
●●
●●●●●●●●●●●
●●●●●●●●●●●●●●●
●●
●●●
●●●●●●●●●●●●●●●●●
●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●
●●
●●●●●●
●●●●●●●●●●●●●●●●●●●
●●●
●●●●●●
●●●●●●●●●●●●●●
●●●●
●●●●●●●
●
●●●●●●●●●●●●●●●●●●●●
●●●●●
●
●●●●●●●●●
●●●●●●
●●●●●●●●●●●●●●●●●●●●●●●●●●●
●
●●●●
●●●●●
●●●●
●●●
●●
●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●
●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●
●●
●
●●●●●●●●●●●●●●●●●●●●●●
●●●●●●●●●
●●●●●●●
●●●●●●●●●●●●●●●●●●●●
●●●●●●●●●●●
●●
●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●
●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●
●
●●
●●●
●●●
●●●
●●●●●●●●●
●●●●●●●●●
●
●●●●●●●●●●●●●●●●●●●●●●●●●●●●
●●●●●●●
●●●●●
●●●
●●●●●●●●
●●●●●●●●●●●●●●●●●●●
●
●●●
●
●●●●●●●●●●●●●●
●●
●●●●●●●
●●●●●
●●●●●●●●●●
●●
●●●●●●
●●●●●
●●●●●●●●●●●●●
●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●
●●●●●●
●●●●●
●●●●●●●●●●
●●●●●●●●●●●●
●●●●
●
●●●●●●●
●
●●
●●●●●●●●●●●●●●●
●●●●●●●●●●●●●
●●●●
●●
●●
●●●●●●●●●●●●●●●●●●
●●●●●●●
●●●●●●●●●●●●●●●●●●●●●●●●
●●●●
●●●●●●●●●●●
●●
●●●●●●●●●●●●●●●
●●●●●●●●●● ●●●●●●●●●●●●●●●●●●●●●●●●●●●●●
●●●●●●●●●●●●●●●●●●
●●●
●●●●●●●
●
●●●●●●●●●●●●●●●●●●●●
●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●
●●●●●●●●●●●●●●●●●●●●●●●●●
●●●●
●●
●●●●●●
●●●●●●
●●●
●
●●●●●●●
●●●●●●●●●●●●●●●
●●●●
●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●
●●●●●●●●
●●●●
●●●●●●●●●●
●●●
●●
●●●●●●●●●●●●●
●●●●●●●
●●●●●●
●●
●
●●●
●●●●●●●
●●●●●●●●●
●●●●
●●●
●●●●●●●●●
●●●● ●
●●●●●●●
●●●●●●●●●●●●●●●●
●●●●●●●●●●●●●●●
●●●●●●●●●●●●●●●●●●●
●●●●●●●●●●●●●●●●●
●●
●●●●●●
●●●●●
●
●●●●●●●●
●●●●●●●●
●●● ●●●●●●●●●●●●●●●●●●●●●●●●●●●● ●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●
●
●●●●●●●●●●●●●●●●
●●●●●●●●●●●●●●●●●●●●●
●●●●●●
●●
●●●●●●●●●●●●●●●●●
●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●
●●
●●●●●●●●●●●●●●●●●●●●●●●●●●●
●●●●
●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●
●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●
●●●●
●
●●●●●●●●●
●●●●●●●●
●●●●●●●●●●●●●●●●●●●●●●●
●●
●●●
●●●●●●●●
●●●●●●●●
●●●●●●●
●●
●●●●●●●●●●●
●●●●●●●●●●●●●●●●
●●●●●●●●●●●
●●●●●●●●●●
●●
●●
●●●●●●●●●●●●●●
●●●●
●●
●
●●●●●●●
●●●●●●●●●●●●●
●●●●●●●●●●●●●●
●
●
●●●
●●●●●●
●●●●●
●●
●●●●●●●
●●●●●
●●●●●
●●●●●●●●●●●●●●●●●●●●●●●●●
●●●●●●●●●●●●●
●●●●●●●●●●
●●●●●
●
●●●●●●●●●
●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●
●●●●●●●●●●●●●●●●●●
●●●●●●●
●●●
● ●●
●●
●
●●●
●
●
●●●●●●●
●●
●●●●●●●●●
●●●●
●●●●●
●●●●●
●●●●●●●●●●
●
●●●●
●●●●●●●●●●●●●●●●
●●●●
●●●●●
●●●●●
●●●●●●●●●●●●
●●●●●●
●●●●●●
●●●●●
●●●●●●●●●●●●●●●●●●●●●●●●●●●
●●●●●●●●
●●●●●●●●●●●●●●●●●●●●●●
●●●●●●●●●●●●●●●●●●●●●●●●●●●●●
●●●●●●●●●●●●●●●●●●●●●●
●●●●●●
●●●●●●●●●●●●●●
●
●●●●
●●●●
●●●●●●
●●●●●●●●●●●●●●●●●
●●●●●●●●●●●●●●●●●●●●
●●●●●●●●
●●●●●●●●●●●●●
●●●●●●●●●●
●●●●●●●●●●●●●●●●●●
●●
●●●●●
●●●●●●
●●●●●●●●●●
●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●
●●●●●●●●●●●●●●●●●●●●●
●●●●●●●●●●●
●●●
●●●●●●●●●●●
●●●●●
●●●●●
●●●
●●●●●●●●●●●●
●●●●●●●●●
●●
●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●
●●●●●●●●●●●●●●
●●●●●
●●
●●●●●
●●●●●●●●●●●●●●●●●●●●●●●●●●●●●
●●●
●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●
●●●●●●●●●●●●●●●●●●●●●●●●●●
●●●●●●
●●●●●●●●●●●●
●
●●●●●
●●●●●●
●●●●●●●
●●●●
●
●
●●●●
●●●●●●●●
●●●●●●●●
●●●●●●●●
●
●●●●●●●●●
●●●●●●●●●
●●●●●●●
●●●●●●●●●
●●●●●●●●●●●●●●●
●●
●●●●●●●●●●●●●
●●●●●●●
●●●●●●●●●●●●●●●●●●●●●●●
●●●●●●●●●
●●●●●●
●●●●●
●
●●●●●●●●●●●●●●●●●●●●●●●●●●
●●●●●●
●●●●●●●●●●●●●●●●●●●●●●●●
●●●●●●●●
●●●●
●●●●●●●●●●●●●●
●●●
●● ●●●●●●●●●●●●●
●●●●●●●●●●●●●●●●●●●●●●●●●●
●●
●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●
●●●●●●●●●
●●●●
●●●●●●●●
●●●●●
●●●●●●●
●●●●
●●●●●
●●
●●●●●●●●●●●●●●
●●●●●●●●
●●●●●●●●●●●●●
●●●●●●●●●
●●●
●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●
●●●●●●●●●●●●●●●●
●●●●●●
●●●●●●●●●●●●●●●●●●●●●●●
●●●●●●●
●●●●●●●●●●●●●●●●●●●●●●●●●●●●
●●●●●●●●
●
●●●●●●●●●●●●●●●●●●●●●●●
●●●●●●●●
●●●●●●●
●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●
●●●●●●
●●●●
●●●●●●●
●●●
●●●●●●●●●
●
●●●●
●●
●●●●●●●●●●●
●●●●
●●●●●●●●●●●●●●●●●●●●●●●●●●●●●
●●●●
●●
●●●●●●●
●●●●●●●●●●
●●●●●●●●●●●●●●●●●●●●●●●●●●●●
●
●
●●
●●●
●●●●
●
●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●
●●●●●●●●●●●●●●●●●●●●●●●●
●●●●●●
●●●
●
●●●●●
●●●
●●●
●●●●●
●●●●●●●●●●●
●●●●●●●●●●
●●●●●●●●●●
●●●●●
●●●●●
●
●●
●●●●●●●●●●●●●●●●●●●●●●●●●●●●
●●●●●●●
●●
●●●●●●●●●●●●●●●●●●
●●●●●●●●
●
●
●
●●●●●
●●●●●
●●●●
●●●●● ●●●●●●●●●●●●
●●●●●●●
●
●
●●●●●●●
●●●●●●●●
●●●●●●
●●●●●●
●●●●●
●●●●●●●
●●●●●●●
●●
●●●●●●●●●●
●●●●●●●●●●●●●●●●●●●●●●●●●●
●●●●●●
●
●●●●●●●●●●●●●●●●●●●●
●●●●●●●●●●●●●●●●●●●
●
●●●●
●
●●●●●●●●●●
●●●●●●●●●●●●●
●●●
●●
●
●●●●●
●
●●●●●●●●●●●●●●
●●●●
●●●
●●●●●●●
●●●●●●●
●●
●●●●●●●●●●●●●●
●●●●●●●●●●
●
●●●●●
●●●●●●
●●●●●
●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●
●
●●●●●●●●●●●●●●●●●
●
●●
●●●●●●●●●
●●●●●●●●●●●●●●●
●●
●●●●●●●●
●●●●●●
●
●●●●
●●●●●●
●●●●
●●
●●●
●
●
●●●●●●●
●●●●●●●●
●●●●●
●●●●●
●●●●●●
●●●●●
●●●●
●
●●●● ●●●●●
●●●●●●●●●●●●●
●●●●●●●●●●●●●●●
●●●●
●●●●●●●●●●●●●●●●●●
●●●●●●●
●
●●●
●●●●●●●●●●●●●●●●●
●
●
●●●●●●
●●●●●●●●●
●●●●●●●●●●●●●
●●●
●●●●
●●●●●●●●●●●●●●●●
●
●●●●●●●
●●●●●●
●●●●●●●●●●●●●●●●●●●●●●●●●●●●●
●●●●●●●
●●●●●●
●●●●●
●●●●●●●
●●●●●●
●●●●●
●
●●●●●●
●
●●●●●●●●●●●
●
●●●●●●●
●●●●●●●●●●●●●●●●●●●
●●●●●●●●●●●●●●●●●
●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●
●●●●●●●●
●●●
●●●●
●●●●●●●●●●●●●●●●●●●
●●●●●●●●●
●●●●
●●●●●●●●
●●●
●●
●●●
●●●●●●●●●●●●●●●●●●●●●●●●●●●●
●●●●●●●●●●●●●●
●●●●●●●●●●●●●●●●●●●●●●●●●●●
●●
●●●●●●●●●●●
●●●
●●●●●●●●●●●●
●●●●●●●●●●●●●●●●●
●●●●●●●●●●●●●●●●●●●
●●●●
●●●
●●●●
●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●
●●●●●●●
●●●
●●●●●●●●●
●●●●●●●
●●●●
●
●
●●●●●●●●●●●●●●●●●
●●●●●●●●●●●●●●●●●●●●
●●●●●●●●●●●●●
●
●●●
●●●●●●●●●●●●●●●●●●●
●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●
●●
●●
●●●●●●●●●●●●●●●●●●●●●●●●●●●●●
●●●●●
●●●●●●●●●
●●
●●●●●●●●●●●●
●●●●●●●●●●
●
●●
●●●●●●●●●
●
●●●●●●●
●●●●●●●●●●●●●●●●●●●
●●
●●●
●●●●●●●●●●
●●●
●●●●●●●●●
●●●●●●●●●●●●●●●●
●●●●●●
●
●
●
●●
●●●●●●
●●
●
●●●●●●●●●●●●●
●●●
●●●●●●●●●●●●●
●●●●●
●●●●●●●
●●●●●●●●●●●●●●●●●●●●●●●●●●●
●●●●●●●●●●
●●●●●●●●●●●
●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●
●●●●●●
●●
●●●●●●
●●●●●●●●●●●●●●●●●
●
●●●●●
●●●●●●●●●●●●●●●●●●
●●●●●●●●●●●●●●●●●●●●●●●●●●●
●●●●●●●
●
●●●●●●
●●●●●●
●
●●●●
●●●●●●●●●●●●●●●●●●●●●
●●●
●●●●●●●●●●
●●●●●
●●●●●
●●●
●●●●●●●
●

MCMC and Likelihood-free Methods
The Metropolis-Hastings Algorithm
Extensions
Outcome
Result with a simulated sample of 100 points and ϑ1 = 0.6,ϑ2 = 0.2 and scale ω = 2.0
● ●
−2 −1 0 1 2
−1.
0−
0.5
0.0
0.5
1.0
θ1
θ 2
●●●●●●●●●●
●●●●●●●●●●●●●●●●●●●●●
●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●
●●●●●●●●●●●●●●●
●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●
●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●
●●●●●●●●●●●●●●●●●●●
●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●
●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●
●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●
●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●
●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●
●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●
●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●
●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●
●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●
●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●
●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●
●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●
●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●
●●●●●●●●●●●●●●
●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●
●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●
●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●
●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●
●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●
●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●
●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●
●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●
●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●
●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●
●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●
●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●● ●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●
●●●●●●●●●●●●●●●●●●●●●●●●●●●●
●●●●●●●●●●●●●●●●●●●●●
●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●
●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●

MCMC and Likelihood-free Methods
The Gibbs Sampler
The Gibbs Sampler
skip to population Monte Carlo
The Gibbs SamplerGeneral PrinciplesCompletionConvergenceThe Hammersley-Clifford theorem

MCMC and Likelihood-free Methods
The Gibbs Sampler
General Principles
General Principles
A very specific simulation algorithm based on the targetdistribution f :
1. Uses the conditional densities f1, . . . , fp from f
2. Start with the random variable X = (X1, . . . , Xp)3. Simulate from the conditional densities,
Xi|x1, x2, . . . , xi−1, xi+1, . . . , xp
∼ fi(xi|x1, x2, . . . , xi−1, xi+1, . . . , xp)
for i = 1, 2, . . . , p.

MCMC and Likelihood-free Methods
The Gibbs Sampler
General Principles
General Principles
A very specific simulation algorithm based on the targetdistribution f :
1. Uses the conditional densities f1, . . . , fp from f
2. Start with the random variable X = (X1, . . . , Xp)
3. Simulate from the conditional densities,
Xi|x1, x2, . . . , xi−1, xi+1, . . . , xp
∼ fi(xi|x1, x2, . . . , xi−1, xi+1, . . . , xp)
for i = 1, 2, . . . , p.

MCMC and Likelihood-free Methods
The Gibbs Sampler
General Principles
General Principles
A very specific simulation algorithm based on the targetdistribution f :
1. Uses the conditional densities f1, . . . , fp from f
2. Start with the random variable X = (X1, . . . , Xp)3. Simulate from the conditional densities,
Xi|x1, x2, . . . , xi−1, xi+1, . . . , xp
∼ fi(xi|x1, x2, . . . , xi−1, xi+1, . . . , xp)
for i = 1, 2, . . . , p.

MCMC and Likelihood-free Methods
The Gibbs Sampler
General Principles
Algorithm (Gibbs sampler)
Given x(t) = (x(t)1 , . . . , x
(t)p ), generate
1. X(t+1)1 ∼ f1(x1|x(t)
2 , . . . , x(t)p );
2. X(t+1)2 ∼ f2(x2|x(t+1)
1 , x(t)3 , . . . , x
(t)p ),
. . .
p. X(t+1)p ∼ fp(xp|x(t+1)
1 , . . . , x(t+1)p−1 )
X(t+1) → X ∼ f

MCMC and Likelihood-free Methods
The Gibbs Sampler
General Principles
Properties
The full conditionals densities f1, . . . , fp are the only densities usedfor simulation. Thus, even in a high dimensional problem, all ofthe simulations may be univariate
The Gibbs sampler is not reversible with respect to f . However,each of its p components is. Besides, it can be turned into areversible sampler, either using the Random Scan Gibbs sampler
see section or running instead the (double) sequence
f1 · · · fp−1fpfp−1 · · · f1

MCMC and Likelihood-free Methods
The Gibbs Sampler
General Principles
Properties
The full conditionals densities f1, . . . , fp are the only densities usedfor simulation. Thus, even in a high dimensional problem, all ofthe simulations may be univariateThe Gibbs sampler is not reversible with respect to f . However,each of its p components is. Besides, it can be turned into areversible sampler, either using the Random Scan Gibbs sampler
see section or running instead the (double) sequence
f1 · · · fp−1fpfp−1 · · · f1

MCMC and Likelihood-free Methods
The Gibbs Sampler
General Principles
Example (Bivariate Gibbs sampler)
(X,Y ) ∼ f(x, y)
Generate a sequence of observations bySet X0 = x0
For t = 1, 2, . . . , generate
Yt ∼ fY |X(·|xt−1)Xt ∼ fX|Y (·|yt)
where fY |X and fX|Y are the conditional distributions

MCMC and Likelihood-free Methods
The Gibbs Sampler
General Principles
A Very Simple Example: Independent N (µ, σ2)Observations
When Y1, . . . , Yniid∼ N (y|µ, σ2) with both µ and σ unknown, the
posterior in (µ, σ2) is conjugate outside a standard familly
But...
µ|Y 0:n, σ2 ∼ N
(µ∣∣∣ 1n
∑ni=1 Yi,
σ2
n )
σ2|Y 1:n, µ ∼ IG(σ2∣∣n
2 − 1, 12
∑ni=1(Yi − µ)2
)assuming constant (improper) priors on both µ and σ2
I Hence we may use the Gibbs sampler for simulating from theposterior of (µ, σ2)

MCMC and Likelihood-free Methods
The Gibbs Sampler
General Principles
A Very Simple Example: Independent N (µ, σ2)Observations
When Y1, . . . , Yniid∼ N (y|µ, σ2) with both µ and σ unknown, the
posterior in (µ, σ2) is conjugate outside a standard familly
But...
µ|Y 0:n, σ2 ∼ N
(µ∣∣∣ 1n
∑ni=1 Yi,
σ2
n )
σ2|Y 1:n, µ ∼ IG(σ2∣∣n
2 − 1, 12
∑ni=1(Yi − µ)2
)assuming constant (improper) priors on both µ and σ2
I Hence we may use the Gibbs sampler for simulating from theposterior of (µ, σ2)

MCMC and Likelihood-free Methods
The Gibbs Sampler
General Principles
R Gibbs Sampler for Gaussian posterior
n = length(Y);S = sum(Y);mu = S/n;for (i in 1:500)
S2 = sum((Y-mu)^2);sigma2 = 1/rgamma(1,n/2-1,S2/2);mu = S/n + sqrt(sigma2/n)*rnorm(1);

MCMC and Likelihood-free Methods
The Gibbs Sampler
General Principles
Example of results with n = 10 observations from theN (0, 1) distribution
Number of Iterations 1
, 2, 3, 4, 5, 10, 25, 50, 100, 500

MCMC and Likelihood-free Methods
The Gibbs Sampler
General Principles
Example of results with n = 10 observations from theN (0, 1) distribution
Number of Iterations 1, 2
, 3, 4, 5, 10, 25, 50, 100, 500

MCMC and Likelihood-free Methods
The Gibbs Sampler
General Principles
Example of results with n = 10 observations from theN (0, 1) distribution
Number of Iterations 1, 2, 3
, 4, 5, 10, 25, 50, 100, 500

MCMC and Likelihood-free Methods
The Gibbs Sampler
General Principles
Example of results with n = 10 observations from theN (0, 1) distribution
Number of Iterations 1, 2, 3, 4
, 5, 10, 25, 50, 100, 500

MCMC and Likelihood-free Methods
The Gibbs Sampler
General Principles
Example of results with n = 10 observations from theN (0, 1) distribution
Number of Iterations 1, 2, 3, 4, 5
, 10, 25, 50, 100, 500

MCMC and Likelihood-free Methods
The Gibbs Sampler
General Principles
Example of results with n = 10 observations from theN (0, 1) distribution
Number of Iterations 1, 2, 3, 4, 5, 10
, 25, 50, 100, 500

MCMC and Likelihood-free Methods
The Gibbs Sampler
General Principles
Example of results with n = 10 observations from theN (0, 1) distribution
Number of Iterations 1, 2, 3, 4, 5, 10, 25
, 50, 100, 500

MCMC and Likelihood-free Methods
The Gibbs Sampler
General Principles
Example of results with n = 10 observations from theN (0, 1) distribution
Number of Iterations 1, 2, 3, 4, 5, 10, 25, 50
, 100, 500

MCMC and Likelihood-free Methods
The Gibbs Sampler
General Principles
Example of results with n = 10 observations from theN (0, 1) distribution
Number of Iterations 1, 2, 3, 4, 5, 10, 25, 50, 100
, 500

MCMC and Likelihood-free Methods
The Gibbs Sampler
General Principles
Example of results with n = 10 observations from theN (0, 1) distribution
Number of Iterations 1, 2, 3, 4, 5, 10, 25, 50, 100, 500

MCMC and Likelihood-free Methods
The Gibbs Sampler
General Principles
Limitations of the Gibbs sampler
Formally, a special case of a sequence of 1-D M-H kernels, all withacceptance rate uniformly equal to 1.The Gibbs sampler
1. limits the choice of instrumental distributions
2. requires some knowledge of f
3. is, by construction, multidimensional
4. does not apply to problems where the number of parametersvaries as the resulting chain is not irreducible.

MCMC and Likelihood-free Methods
The Gibbs Sampler
General Principles
Limitations of the Gibbs sampler
Formally, a special case of a sequence of 1-D M-H kernels, all withacceptance rate uniformly equal to 1.The Gibbs sampler
1. limits the choice of instrumental distributions
2. requires some knowledge of f
3. is, by construction, multidimensional
4. does not apply to problems where the number of parametersvaries as the resulting chain is not irreducible.

MCMC and Likelihood-free Methods
The Gibbs Sampler
General Principles
Limitations of the Gibbs sampler
Formally, a special case of a sequence of 1-D M-H kernels, all withacceptance rate uniformly equal to 1.The Gibbs sampler
1. limits the choice of instrumental distributions
2. requires some knowledge of f
3. is, by construction, multidimensional
4. does not apply to problems where the number of parametersvaries as the resulting chain is not irreducible.

MCMC and Likelihood-free Methods
The Gibbs Sampler
General Principles
Limitations of the Gibbs sampler
Formally, a special case of a sequence of 1-D M-H kernels, all withacceptance rate uniformly equal to 1.The Gibbs sampler
1. limits the choice of instrumental distributions
2. requires some knowledge of f
3. is, by construction, multidimensional
4. does not apply to problems where the number of parametersvaries as the resulting chain is not irreducible.

MCMC and Likelihood-free Methods
The Gibbs Sampler
Completion
Latent variables are back
The Gibbs sampler can be generalized in much wider generalityA density g is a completion of f if∫
Zg(x, z) dz = f(x)
Note
The variable z may be meaningless for the problem

MCMC and Likelihood-free Methods
The Gibbs Sampler
Completion
Latent variables are back
The Gibbs sampler can be generalized in much wider generalityA density g is a completion of f if∫
Zg(x, z) dz = f(x)
Note
The variable z may be meaningless for the problem

MCMC and Likelihood-free Methods
The Gibbs Sampler
Completion
Purpose
g should have full conditionals that are easy to simulate for aGibbs sampler to be implemented with g rather than f
For p > 1, write y = (x, z) and denote the conditional densities ofg(y) = g(y1, . . . , yp) by
Y1|y2, . . . , yp ∼ g1(y1|y2, . . . , yp),Y2|y1, y3, . . . , yp ∼ g2(y2|y1, y3, . . . , yp),
. . . ,
Yp|y1, . . . , yp−1 ∼ gp(yp|y1, . . . , yp−1).

MCMC and Likelihood-free Methods
The Gibbs Sampler
Completion
The move from Y (t) to Y (t+1) is defined as follows:
Algorithm (Completion Gibbs sampler)
Given (y(t)1 , . . . , y
(t)p ), simulate
1. Y(t+1)
1 ∼ g1(y1|y(t)2 , . . . , y
(t)p ),
2. Y(t+1)
2 ∼ g2(y2|y(t+1)1 , y
(t)3 , . . . , y
(t)p ),
. . .
p. Y(t+1)p ∼ gp(yp|y(t+1)
1 , . . . , y(t+1)p−1 ).

MCMC and Likelihood-free Methods
The Gibbs Sampler
Completion
Example (Mixtures all over again)
Hierarchical missing data structure:If
X1, . . . , Xn ∼k∑i=1
pif(x|θi),
then
X|Z ∼ f(x|θZ), Z ∼ p1I(z = 1) + . . .+ pkI(z = k),
Z is the component indicator associated with observation x

MCMC and Likelihood-free Methods
The Gibbs Sampler
Completion
Example (Mixtures (2))
Conditionally on (Z1, . . . , Zn) = (z1, . . . , zn) :
π(p1, . . . , pk, θ1, . . . , θk|x1, . . . , xn, z1, . . . , zn)∝ pα1+n1−1
1 . . . pαk+nk−1k
×π(θ1|y1 + n1x1, λ1 + n1) . . . π(θk|yk + nkxk, λk + nk),
withni =
∑j
I(zj = i) and xi =∑j; zj=i
xj/ni.

MCMC and Likelihood-free Methods
The Gibbs Sampler
Completion
Algorithm (Mixture Gibbs sampler)
1. Simulate
θi ∼ π(θi|yi + nixi, λi + ni) (i = 1, . . . , k)(p1, . . . , pk) ∼ D(α1 + n1, . . . , αk + nk)
2. Simulate (j = 1, . . . , n)
Zj |xj , p1, . . . , pk, θ1, . . . , θk ∼k∑i=1
pijI(zj = i)
with (i = 1, . . . , k)pij ∝ pif(xj |θi)
and update ni and xi (i = 1, . . . , k).

MCMC and Likelihood-free Methods
The Gibbs Sampler
Completion
A wee problem
−1 0 1 2 3 4
−1
01
23
4
µ1
µ2
Gibbs started at random
Gibbs stuck at the wrong mode
−1 0 1 2 3
−1
01
23
µ1
µ2

MCMC and Likelihood-free Methods
The Gibbs Sampler
Completion
A wee problem
−1 0 1 2 3 4
−1
01
23
4
µ1
µ2
Gibbs started at random
Gibbs stuck at the wrong mode
−1 0 1 2 3
−1
01
23
µ1
µ2

MCMC and Likelihood-free Methods
The Gibbs Sampler
Completion
Slice sampler as generic Gibbs
If f(θ) can be written as a product
k∏i=1
fi(θ),
it can be completed as
k∏i=1
I0≤ωi≤fi(θ),
leading to the following Gibbs algorithm:

MCMC and Likelihood-free Methods
The Gibbs Sampler
Completion
Slice sampler as generic Gibbs
If f(θ) can be written as a product
k∏i=1
fi(θ),
it can be completed as
k∏i=1
I0≤ωi≤fi(θ),
leading to the following Gibbs algorithm:

MCMC and Likelihood-free Methods
The Gibbs Sampler
Completion
Algorithm (Slice sampler)
Simulate
1. ω(t+1)1 ∼ U[0,f1(θ(t))];
. . .
k. ω(t+1)k ∼ U[0,fk(θ(t))];
k+1. θ(t+1) ∼ UA(t+1) , with
A(t+1) = {y; fi(y) ≥ ω(t+1)i , i = 1, . . . , k}.

MCMC and Likelihood-free Methods
The Gibbs Sampler
Completion
Example of results with a truncated N (−3, 1) distribution
0.0 0.2 0.4 0.6 0.8 1.0
0.00
00.
002
0.00
40.
006
0.00
80.
010
x
y
Number of Iterations 2
, 3, 4, 5, 10, 50, 100

MCMC and Likelihood-free Methods
The Gibbs Sampler
Completion
Example of results with a truncated N (−3, 1) distribution
0.0 0.2 0.4 0.6 0.8 1.0
0.00
00.
002
0.00
40.
006
0.00
80.
010
x
y
Number of Iterations 2, 3
, 4, 5, 10, 50, 100

MCMC and Likelihood-free Methods
The Gibbs Sampler
Completion
Example of results with a truncated N (−3, 1) distribution
0.0 0.2 0.4 0.6 0.8 1.0
0.00
00.
002
0.00
40.
006
0.00
80.
010
x
y
Number of Iterations 2, 3, 4
, 5, 10, 50, 100

MCMC and Likelihood-free Methods
The Gibbs Sampler
Completion
Example of results with a truncated N (−3, 1) distribution
0.0 0.2 0.4 0.6 0.8 1.0
0.00
00.
002
0.00
40.
006
0.00
80.
010
x
y
Number of Iterations 2, 3, 4, 5
, 10, 50, 100

MCMC and Likelihood-free Methods
The Gibbs Sampler
Completion
Example of results with a truncated N (−3, 1) distribution
0.0 0.2 0.4 0.6 0.8 1.0
0.00
00.
002
0.00
40.
006
0.00
80.
010
x
y
Number of Iterations 2, 3, 4, 5, 10
, 50, 100

MCMC and Likelihood-free Methods
The Gibbs Sampler
Completion
Example of results with a truncated N (−3, 1) distribution
0.0 0.2 0.4 0.6 0.8 1.0
0.00
00.
002
0.00
40.
006
0.00
80.
010
x
y
Number of Iterations 2, 3, 4, 5, 10, 50
, 100

MCMC and Likelihood-free Methods
The Gibbs Sampler
Completion
Example of results with a truncated N (−3, 1) distribution
0.0 0.2 0.4 0.6 0.8 1.0
0.00
00.
002
0.00
40.
006
0.00
80.
010
x
y
Number of Iterations 2, 3, 4, 5, 10, 50, 100

MCMC and Likelihood-free Methods
The Gibbs Sampler
Completion
Good slices
The slice sampler usually enjoys good theoretical properties (likegeometric ergodicity and even uniform ergodicity under bounded fand bounded X ).As k increases, the determination of the set A(t+1) may getincreasingly complex.

MCMC and Likelihood-free Methods
The Gibbs Sampler
Completion
Example (Stochastic volatility core distribution)
Difficult part of the stochastic volatility model
π(x) ∝ exp−{σ2(x− µ)2 + β2 exp(−x)y2 + x
}/2 ,
simplified in exp−{x2 + α exp(−x)
}
Slice sampling means simulation from a uniform distribution on
A ={x; exp−
{x2 + α exp(−x)
}/2 ≥ u
}=
{x;x2 + α exp(−x) ≤ ω
}if we set ω = −2 log u.Note Inversion of x2 + α exp(−x) = ω needs to be done bytrial-and-error.

MCMC and Likelihood-free Methods
The Gibbs Sampler
Completion
Example (Stochastic volatility core distribution)
Difficult part of the stochastic volatility model
π(x) ∝ exp−{σ2(x− µ)2 + β2 exp(−x)y2 + x
}/2 ,
simplified in exp−{x2 + α exp(−x)
}Slice sampling means simulation from a uniform distribution on
A ={x; exp−
{x2 + α exp(−x)
}/2 ≥ u
}=
{x;x2 + α exp(−x) ≤ ω
}if we set ω = −2 log u.Note Inversion of x2 + α exp(−x) = ω needs to be done bytrial-and-error.

MCMC and Likelihood-free Methods
The Gibbs Sampler
Completion
0 10 20 30 40 50 60 70 80 90 100−0.1
−0.05
0
0.05
0.1
Lag
Cor
rela
tion
−1 −0.5 0 0.5 1 1.5 2 2.5 3 3.50
0.2
0.4
0.6
0.8
1D
ensi
ty
Histogram of a Markov chain produced by a slice samplerand target distribution in overlay.

MCMC and Likelihood-free Methods
The Gibbs Sampler
Convergence
Properties of the Gibbs sampler
Theorem (Convergence)
For(Y1, Y2, · · · , Yp) ∼ g(y1, . . . , yp),
if either[Positivity condition]
(i) g(i)(yi) > 0 for every i = 1, · · · , p, implies thatg(y1, . . . , yp) > 0, where g(i) denotes the marginal distributionof Yi, or
(ii) the transition kernel is absolutely continuous with respect to g,
then the chain is irreducible and positive Harris recurrent.

MCMC and Likelihood-free Methods
The Gibbs Sampler
Convergence
Properties of the Gibbs sampler (2)
Consequences
(i) If∫h(y)g(y)dy <∞, then
limnT→∞
1T
T∑t=1
h1(Y (t)) =∫h(y)g(y)dy a.e. g.
(ii) If, in addition, (Y (t)) is aperiodic, then
limn→∞
∥∥∥∥∫ Kn(y, ·)µ(dx)− f∥∥∥∥TV
= 0
for every initial distribution µ.

MCMC and Likelihood-free Methods
The Gibbs Sampler
Convergence
Slice sampler
fast on that slice
For convergence, the properties of Xt and of f(Xt) are identical
Theorem (Uniform ergodicity)
If f is bounded and suppf is bounded, the simple slice sampler isuniformly ergodic.
[Mira & Tierney, 1997]

MCMC and Likelihood-free Methods
The Gibbs Sampler
Convergence
A small set for a slice sampler
no slice detail
For ε? > ε?,C = {x ∈ X ; ε? < f(x) < ε?}
is a small set:Pr(x, ·) ≥ ε?
ε?µ(·)
where
µ(A) =1ε?
∫ ε?
0
λ(A ∩ L(ε))λ(L(ε))
dε
if L(ε) = {x ∈ X ; f(x) > ε}‘[Roberts & Rosenthal, 1998]

MCMC and Likelihood-free Methods
The Gibbs Sampler
Convergence
Slice sampler: drift
Under differentiability and monotonicity conditions, the slicesampler also verifies a drift condition with V (x) = f(x)−β, isgeometrically ergodic, and there even exist explicit bounds on thetotal variation distance
[Roberts & Rosenthal, 1998]
Example (Exponential Exp(1))
For n > 23,
||Kn(x, ·)− f(·)||TV ≤ .054865 (0.985015)n (n− 15.7043)

MCMC and Likelihood-free Methods
The Gibbs Sampler
Convergence
Slice sampler: drift
Under differentiability and monotonicity conditions, the slicesampler also verifies a drift condition with V (x) = f(x)−β, isgeometrically ergodic, and there even exist explicit bounds on thetotal variation distance
[Roberts & Rosenthal, 1998]
Example (Exponential Exp(1))
For n > 23,
||Kn(x, ·)− f(·)||TV ≤ .054865 (0.985015)n (n− 15.7043)

MCMC and Likelihood-free Methods
The Gibbs Sampler
Convergence
Slice sampler: convergence
no more slice detail
Theorem
For any density such that
ε∂
∂ελ ({x ∈ X ; f(x) > ε}) is non-increasing
then||K523(x, ·)− f(·)||TV ≤ .0095
[Roberts & Rosenthal, 1998]

MCMC and Likelihood-free Methods
The Gibbs Sampler
Convergence
A poor slice sampler
Example
Consider
f(x) = exp {−||x||} x ∈ Rd
Slice sampler equivalent toone-dimensional slice sampler on
π(z) = zd−1 e−z z > 0
or on
π(u) = e−u1/d
u > 0
Poor performances when d large(heavy tails)
0 200 400 600 800 1000
-2-1
01
1 dimensional run
co
rre
latio
n
0 10 20 30 40
0.0
0.2
0.4
0.6
0.8
1.0
1 dimensional acf
0 200 400 600 800 1000
10
15
20
25
30
10 dimensional run
co
rre
latio
n
0 10 20 30 40
0.0
0.2
0.4
0.6
0.8
1.0
10 dimensional acf
0 200 400 600 800 1000
02
04
06
0
20 dimensional run
co
rre
latio
n
0 10 20 30 40
0.0
0.2
0.4
0.6
0.8
1.0
20 dimensional acf
0 200 400 600 800 1000
01
00
20
03
00
40
0
100 dimensional run
co
rre
latio
n
0 10 20 30 40
0.0
0.2
0.4
0.6
0.8
1.0
100 dimensional acf
Sample runs of log(u) andACFs for log(u) (Roberts& Rosenthal, 1999)

MCMC and Likelihood-free Methods
The Gibbs Sampler
The Hammersley-Clifford theorem
Hammersley-Clifford theorem
An illustration that conditionals determine the joint distribution
Theorem
If the joint density g(y1, y2) have conditional distributionsg1(y1|y2) and g2(y2|y1), then
g(y1, y2) =g2(y2|y1)∫
g2(v|y1)/g1(y1|v) dv.
[Hammersley & Clifford, circa 1970]

MCMC and Likelihood-free Methods
The Gibbs Sampler
The Hammersley-Clifford theorem
General HC decomposition
Under the positivity condition, the joint distribution g satisfies
g(y1, . . . , yp) ∝p∏j=1
g`j (y`j |y`1 , . . . , y`j−1, y′`j+1
, . . . , y′`p)
g`j (y′`j|y`1 , . . . , y`j−1
, y′`j+1, . . . , y′`p)
for every permutation ` on {1, 2, . . . , p} and every y′ ∈ Y .

MCMC and Likelihood-free Methods
Population Monte Carlo
Sequential importance sampling
Computational issues in Bayesian statistics
The Metropolis-Hastings Algorithm
The Gibbs Sampler
Population Monte Carlo
Approximate Bayesian computation
ABC for model choice

MCMC and Likelihood-free Methods
Population Monte Carlo
Importance sampling (revisited)
basic importance
Approximation of integrals
I =∫h(x)π(x)dx
by unbiased estimators
I =1n
n∑i=1
%ih(xi)
when
x1, . . . , xniid∼ q(x) and %i
def=π(xi)q(xi)

MCMC and Likelihood-free Methods
Population Monte Carlo
Iterated importance sampling
As in Markov Chain Monte Carlo (MCMC) algorithms,introduction of a temporal dimension :
x(t)i ∼ qt(x|x
(t−1)i ) i = 1, . . . , n, t = 1, . . .
and
It =1n
n∑i=1
%(t)i h(x(t)
i )
is still unbiased for
%(t)i =
πt(x(t)i )
qt(x(t)i |x
(t−1)i )
, i = 1, . . . , n

MCMC and Likelihood-free Methods
Population Monte Carlo
Fundamental importance equality
Preservation of unbiasedness
E[h(X(t))
π(X(t))qt(X(t)|X(t−1))
]
=∫h(x)
π(x)qt(x|y)
qt(x|y) g(y) dx dy
=∫h(x)π(x) dx
for any distribution g on X(t−1)

MCMC and Likelihood-free Methods
Population Monte Carlo
Sequential variance decomposition
Furthermore,
var(It
)=
1n2
n∑i=1
var(%
(t)i h(x(t)
i )),
if var(%
(t)i
)exists, because the x
(t)i ’s are conditionally uncorrelated
Note
This decomposition is still valid for correlated [in i] x(t)i ’s when
incorporating weights %(t)i

MCMC and Likelihood-free Methods
Population Monte Carlo
Simulation of a population
The importance distribution of the sample (a.k.a. particles) x(t)
qt(x(t)|x(t−1))
can depend on the previous sample x(t−1) in any possible way aslong as marginal distributions
qit(x) =∫qt(x(t)) dx(t)
−i
can be expressed to build importance weights
%it =π(x(t)
i )
qit(x(t)i )

MCMC and Likelihood-free Methods
Population Monte Carlo
Special case of the product proposal
If
qt(x(t)|x(t−1)) =n∏i=1
qit(x(t)i |x
(t−1))
[Independent proposals]then
var(It
)=
1n2
n∑i=1
var(%
(t)i h(x(t)
i )),

MCMC and Likelihood-free Methods
Population Monte Carlo
Validation
skip validation
E[%
(t)i h(X(t)
i ) %(t)j h(X(t)
j )]
=∫h(xi)
π(xi)qit(xi|x(t−1))
π(xj)qjt(xj |x(t−1))
h(xj)
qit(xi|x(t−1)) qjt(xj |x(t−1)) dxi dxj g(x(t−1))dx(t−1)
= Eπ [h(X)]2
whatever the distribution g on x(t−1)

MCMC and Likelihood-free Methods
Population Monte Carlo
Self-normalised version
In general, π is unscaled and the weight
%(t)i ∝
π(x(t)i )
qit(x(t)i )
, i = 1, . . . , n ,
is scaled so that ∑i
%(t)i = 1

MCMC and Likelihood-free Methods
Population Monte Carlo
Self-normalised version properties
I Loss of the unbiasedness property and the variancedecomposition
I Normalising constant can be estimated by
$t =1tn
t∑τ=1
n∑i=1
π(x(τ)i )
qiτ (x(τ)i )
I Variance decomposition (approximately) recovered if $t−1 isused instead

MCMC and Likelihood-free Methods
Population Monte Carlo
Sampling importance resampling
Importance sampling from g can also produce samples from thetarget π
[Rubin, 1987]
Theorem (Bootstraped importance sampling)
If a sample (x?i )1≤i≤m is derived from the weighted sample(xi, %i)1≤i≤n by multinomial sampling with weights %i, then
x?i ∼ π(x)
Note
Obviously, the x?i ’s are not iid

MCMC and Likelihood-free Methods
Population Monte Carlo
Sampling importance resampling
Importance sampling from g can also produce samples from thetarget π
[Rubin, 1987]
Theorem (Bootstraped importance sampling)
If a sample (x?i )1≤i≤m is derived from the weighted sample(xi, %i)1≤i≤n by multinomial sampling with weights %i, then
x?i ∼ π(x)
Note
Obviously, the x?i ’s are not iid

MCMC and Likelihood-free Methods
Population Monte Carlo
Sampling importance resampling
Importance sampling from g can also produce samples from thetarget π
[Rubin, 1987]
Theorem (Bootstraped importance sampling)
If a sample (x?i )1≤i≤m is derived from the weighted sample(xi, %i)1≤i≤n by multinomial sampling with weights %i, then
x?i ∼ π(x)
Note
Obviously, the x?i ’s are not iid

MCMC and Likelihood-free Methods
Population Monte Carlo
Iterated sampling importance resampling
This principle can be extended to iterated importance sampling:After each iteration, resampling produces a sample from π
[Again, not iid!]
Incentive
Use previous sample(s) to learn about π and q

MCMC and Likelihood-free Methods
Population Monte Carlo
Iterated sampling importance resampling
This principle can be extended to iterated importance sampling:After each iteration, resampling produces a sample from π
[Again, not iid!]
Incentive
Use previous sample(s) to learn about π and q

MCMC and Likelihood-free Methods
Population Monte Carlo
Generic Population Monte Carlo
Algorithm (Population Monte Carlo Algorithm)
For t = 1, . . . , TFor i = 1, . . . , n,
1. Select the generating distribution qit(·)2. Generate x
(t)i ∼ qit(x)
3. Compute %(t)i = π(x(t)
i )/qit(x(t)i )
Normalise the %(t)i ’s into %
(t)i ’s
Generate Ji,t ∼M((%(t)i )1≤i≤N ) and set xi,t = x
(t)Ji,t

MCMC and Likelihood-free Methods
Population Monte Carlo
D-kernels in competition
A general adaptive construction:
Construct qi,t as a mixture of D different transition kernels
depending on x(t−1)i
qi,t =D∑`=1
pt,`K`(x(t−1)i , x),
D∑`=1
pt,` = 1 ,
and adapt the weights pt,`.
Darwinian example
Take pt,` proportional to the survival rate of the points
(a.k.a. particles) x(t)i generated from K`

MCMC and Likelihood-free Methods
Population Monte Carlo
D-kernels in competition
A general adaptive construction:
Construct qi,t as a mixture of D different transition kernels
depending on x(t−1)i
qi,t =D∑`=1
pt,`K`(x(t−1)i , x),
D∑`=1
pt,` = 1 ,
and adapt the weights pt,`.
Darwinian example
Take pt,` proportional to the survival rate of the points
(a.k.a. particles) x(t)i generated from K`

MCMC and Likelihood-free Methods
Population Monte Carlo
Implementation
Algorithm (D-kernel PMC)
For t = 1, . . . , Tgenerate (Ki,t)1≤i≤N ∼M ((pt,k)1≤k≤D)for 1 ≤ i ≤ N , generate
xi,t ∼ KKi,t(x)
compute and renormalize the importance weights ωi,t
generate (Ji,t)1≤i≤N ∼M ((ωi,t)1≤i≤N )
take xi,t = xJi,t,t and pt+1,d =∑N
i=1 ωi,tId(Ki,t)

MCMC and Likelihood-free Methods
Population Monte Carlo
Links with particle filters
I Sequential setting where π = πt changes with t: PopulationMonte Carlo also adapts to this case
I Can be traced back all the way to Hammersley and Morton(1954) and the self-avoiding random walk problem
I Gilks and Berzuini (2001) produce iterated samples with (SIR)resampling steps, and add an MCMC step: this step must usea πt invariant kernel
I Chopin (2001) uses iterated importance sampling to handlelarge datasets: this is a special case of PMC where the qit’sare the posterior distributions associated with a portion kt ofthe observed dataset

MCMC and Likelihood-free Methods
Population Monte Carlo
Links with particle filters (2)
I Rubinstein and Kroese’s (2004) cross-entropy method isparameterised importance sampling targeted at rare events
I Stavropoulos and Titterington’s (1999) smooth bootstrap andWarnes’ (2001) kernel coupler use nonparametric kernels onthe previous importance sample to build an improvedproposal: this is a special case of PMC
I West (1992) mixture approximation is a precursor of smoothbootstrap
I Mengersen and Robert (2002) “pinball sampler” is an MCMCattempt at population sampling
I Del Moral, Doucet and Jasra (2006, JRSS B) sequentialMonte Carlo samplers also relates to PMC, with a Markoviandependence on the past sample x(t) but (limited) stationarityconstraints

MCMC and Likelihood-free Methods
Population Monte Carlo
Things can go wrong
Unexpected behaviour of the mixture weights when the number ofparticles increases
N∑i=1
ωi,tIKi,t=d−→P1D
Conclusion
At each iteration, every weight converges to 1/D:the algorithm fails to learn from experience!!

MCMC and Likelihood-free Methods
Population Monte Carlo
Things can go wrong
Unexpected behaviour of the mixture weights when the number ofparticles increases
N∑i=1
ωi,tIKi,t=d−→P1D
Conclusion
At each iteration, every weight converges to 1/D:the algorithm fails to learn from experience!!

MCMC and Likelihood-free Methods
Population Monte Carlo
Saved by Rao-Blackwell!!
Modification: Rao-Blackwellisation (=conditioning)
Use the whole mixture in the importance weight:
ωi,t = π(xi,t)D∑d=1
pt,dKd(xi,t−1, xi,t)
instead of
ωi,t =π(xi,t)
KKi,t(xi,t−1, xi,t)

MCMC and Likelihood-free Methods
Population Monte Carlo
Saved by Rao-Blackwell!!
Modification: Rao-Blackwellisation (=conditioning)
Use the whole mixture in the importance weight:
ωi,t = π(xi,t)D∑d=1
pt,dKd(xi,t−1, xi,t)
instead of
ωi,t =π(xi,t)
KKi,t(xi,t−1, xi,t)

MCMC and Likelihood-free Methods
Population Monte Carlo
Adapted algorithm
Algorithm (Rao-Blackwellised D-kernel PMC)
At time t (t = 1, . . . , T ),
Generate(Ki,t)1≤i≤N
iid∼ M((pt,d)1≤d≤D);
Generate(xi,t)1≤i≤N
ind∼ KKi,t(xi,t−1, x)
and set ωi,t = π(xi,t)/∑D
d=1 pt,dKd(xi,t−1, xi,t);
Generate(Ji,t)1≤i≤N
iid∼ M((ωi,t)1≤i≤N )
and set xi,t = xJi,t,t and pt+1,d =∑N
i=1 ωi,tpt,d.

MCMC and Likelihood-free Methods
Population Monte Carlo
Convergence properties
Theorem (LLN)
Under regularity assumptions, for h ∈ L1Π and for every t ≥ 1,
1N
N∑k=1
ωi,th(xi,t)N→∞−→P Π(h)
andpt,d
N→∞−→P αtd
The limiting coefficients (αtd)1≤d≤D are defined recursively as
αtd = αt−1d
∫ (Kd(x, x′)∑D
j=1 αt−1j Kj(x, x′)
)Π⊗Π(dx, dx′).

MCMC and Likelihood-free Methods
Population Monte Carlo
Recursion on the weights
Set F as
F (α) =
(αd
∫ [Kd(x, x′)∑D
j=1 αjKj(x, x′)
]Π⊗Π(dx, dx′)
)1≤d≤D
on the simplex
S =
{α = (α1, . . . , αD); ∀d ∈ {1, . . . , D}, αd ≥ 0 and
D∑d=1
αd = 1
}.
and define the sequence
αt+1 = F (αt)

MCMC and Likelihood-free Methods
Population Monte Carlo
Kullback divergence
Definition (Kullback divergence)
For α ∈ S,
KL(α) =∫ [
log
(π(x)π(x′)
π(x)∑D
d=1 αdKd(x, x′)
)]Π⊗Π(dx, dx′).
Kullback divergence between Π and the mixture.
Goal: Obtain the mixture closest to Π, i.e., that minimises KL(α)

MCMC and Likelihood-free Methods
Population Monte Carlo
Connection with RBDPMCA ??
Theorem
Under the assumption
∀d ∈ {1, . . . , D},−∞ <
∫log(Kd(x, x′))Π⊗Π(dx, dx′) <∞
for every α ∈ SD,
KL(F (α)) ≤ KL(α).
Conclusion
The Kullback divergence decreases at every iteration of RBDPMCA

MCMC and Likelihood-free Methods
Population Monte Carlo
Connection with RBDPMCA ??
Theorem
Under the assumption
∀d ∈ {1, . . . , D},−∞ <
∫log(Kd(x, x′))Π⊗Π(dx, dx′) <∞
for every α ∈ SD,
KL(F (α)) ≤ KL(α).
Conclusion
The Kullback divergence decreases at every iteration of RBDPMCA

MCMC and Likelihood-free Methods
Population Monte Carlo
An integrated EM interpretation
skip interpretation
We have
αmin = arg minα∈S
KL(α) = arg maxα∈S
∫log pα(x)Π⊗Π(dx)
= arg maxα∈S
∫log∫pα(x,K)dK Π⊗Π(dx)
for x = (x, x′) and K ∼M((αd)1≤d≤D). Then αt+1 = F (αt)means
αt+1 = arg maxα
∫∫Eαt(log pα(X,K)|X = x)Π⊗Π(dx)
andlimt→∞
αt = αmin

MCMC and Likelihood-free Methods
Population Monte Carlo
Illustration
Example (A toy example)
Take the target
1/4N (−1, 0.3)(x) + 1/4N (0, 1)(x) + 1/2N (3, 2)(x)
and use 3 proposals: N (−1, 0.3), N (0, 1) and N (3, 2)[Surprise!!!]
Then
1 0.0500000 0.05000000 0.90000002 0.2605712 0.09970292 0.63972596 0.2740816 0.19160178 0.534316610 0.2989651 0.19200904 0.509025916 0.2651511 0.24129039 0.4935585
Weight evolution

MCMC and Likelihood-free Methods
Population Monte Carlo
Illustration
Example (A toy example)
Take the target
1/4N (−1, 0.3)(x) + 1/4N (0, 1)(x) + 1/2N (3, 2)(x)
and use 3 proposals: N (−1, 0.3), N (0, 1) and N (3, 2)[Surprise!!!]
Then
1 0.0500000 0.05000000 0.90000002 0.2605712 0.09970292 0.63972596 0.2740816 0.19160178 0.534316610 0.2989651 0.19200904 0.509025916 0.2651511 0.24129039 0.4935585
Weight evolution

MCMC and Likelihood-free Methods
Population Monte Carlo
Target and mixture evolution

MCMC and Likelihood-free Methods
Population Monte Carlo
c© Learning scheme
The efficiency of the SNIS approximation depends on the choice ofQ, ranging from optimal
q(x) ∝ |h(x)−Π(h)|π(x)
to uselessvar ΠSNIS
Q,N (h) = +∞
Example (PMC=adaptive importance sampling)
Population Monte Carlo is producing a sequence of proposals Qtaiming at improving efficiency
Kull(π, qt) ≤ Kull(π, qt−1) or var ΠSNISQt,∞ (h) ≤ var ΠSNIS
Qt−1,∞(h)
[Cappe, Douc, Guillin, Marin, Robert, 04, 07a, 07b, 08]

MCMC and Likelihood-free Methods
Population Monte Carlo
c© Learning scheme
The efficiency of the SNIS approximation depends on the choice ofQ, ranging from optimal
q(x) ∝ |h(x)−Π(h)|π(x)
to uselessvar ΠSNIS
Q,N (h) = +∞
Example (PMC=adaptive importance sampling)
Population Monte Carlo is producing a sequence of proposals Qtaiming at improving efficiency
Kull(π, qt) ≤ Kull(π, qt−1) or var ΠSNISQt,∞ (h) ≤ var ΠSNIS
Qt−1,∞(h)
[Cappe, Douc, Guillin, Marin, Robert, 04, 07a, 07b, 08]

MCMC and Likelihood-free Methods
Approximate Bayesian computation
Approximate Bayesian computation
Computational issues in Bayesian statistics
The Metropolis-Hastings Algorithm
The Gibbs Sampler
Population Monte Carlo
Approximate Bayesian computationABC basicsAlphabet soupCalibration of ABC
ABC for model choice

MCMC and Likelihood-free Methods
Approximate Bayesian computation
ABC basics
Untractable likelihoods
Cases when the likelihood function f(y|θ) is unavailable and whenthe completion step
f(y|θ) =∫
Zf(y, z|θ) dz
is impossible or too costly because of the dimension of zc© MCMC cannot be implemented!

MCMC and Likelihood-free Methods
Approximate Bayesian computation
ABC basics
Illustrations
Example
Stochastic volatility model: fort = 1, . . . , T,
yt = exp(zt)εt , zt = a+bzt−1+σηt ,
T very large makes it difficult toinclude z within the simulatedparameters
0 200 400 600 800 1000
−0.
4−
0.2
0.0
0.2
0.4
t
Highest weight trajectories

MCMC and Likelihood-free Methods
Approximate Bayesian computation
ABC basics
Illustrations
Example
Potts model: if y takes values on a grid Y of size kn and
f(y|θ) ∝ exp
{θ∑l∼i
Iyl=yi
}
where l∼i denotes a neighbourhood relation, n moderately largeprohibits the computation of the normalising constant

MCMC and Likelihood-free Methods
Approximate Bayesian computation
ABC basics
Illustrations
Example
Inference on CMB: in cosmology, study of the Cosmic MicrowaveBackground via likelihoods immensely slow to computate (e.gWMAP, Plank), because of numerically costly spectral transforms[Data is a Fortran program]
[Kilbinger et al., 2010, MNRAS]

MCMC and Likelihood-free Methods
Approximate Bayesian computation
ABC basics
Illustrations
Example
Phylogenetic tree: in populationgenetics, reconstitution of a commonancestor from a sample of genes viaa phylogenetic tree that is close toimpossible to integrate out[100 processor days with 4parameters]
[Cornuet et al., 2009, Bioinformatics]

MCMC and Likelihood-free Methods
Approximate Bayesian computation
ABC basics
The ABC method
Bayesian setting: target is π(θ)f(x|θ)
When likelihood f(x|θ) not in closed form, likelihood-free rejectiontechnique:
ABC algorithm
For an observation y ∼ f(y|θ), under the prior π(θ), keep jointlysimulating
θ′ ∼ π(θ) , z ∼ f(z|θ′) ,
until the auxiliary variable z is equal to the observed value, z = y.
[Tavare et al., 1997]

MCMC and Likelihood-free Methods
Approximate Bayesian computation
ABC basics
The ABC method
Bayesian setting: target is π(θ)f(x|θ)When likelihood f(x|θ) not in closed form, likelihood-free rejectiontechnique:
ABC algorithm
For an observation y ∼ f(y|θ), under the prior π(θ), keep jointlysimulating
θ′ ∼ π(θ) , z ∼ f(z|θ′) ,
until the auxiliary variable z is equal to the observed value, z = y.
[Tavare et al., 1997]

MCMC and Likelihood-free Methods
Approximate Bayesian computation
ABC basics
The ABC method
Bayesian setting: target is π(θ)f(x|θ)When likelihood f(x|θ) not in closed form, likelihood-free rejectiontechnique:
ABC algorithm
For an observation y ∼ f(y|θ), under the prior π(θ), keep jointlysimulating
θ′ ∼ π(θ) , z ∼ f(z|θ′) ,
until the auxiliary variable z is equal to the observed value, z = y.
[Tavare et al., 1997]

MCMC and Likelihood-free Methods
Approximate Bayesian computation
ABC basics
Why does it work?!
The proof is trivial:
f(θi) ∝∑z∈D
π(θi)f(z|θi)Iy(z)
∝ π(θi)f(y|θi)= π(θi|y) .
[Accept–Reject 101]

MCMC and Likelihood-free Methods
Approximate Bayesian computation
ABC basics
Earlier occurrence
‘Bayesian statistics and Monte Carlo methods are ideallysuited to the task of passing many models over onedataset’
[Don Rubin, Annals of Statistics, 1984]
Note Rubin (1984) does not promote this algorithm forlikelihood-free simulation but frequentist intuition on posteriordistributions: parameters from posteriors are more likely to bethose that could have generated the data.

MCMC and Likelihood-free Methods
Approximate Bayesian computation
ABC basics
A as approximative
When y is a continuous random variable, equality z = y is replacedwith a tolerance condition,
%(y, z) ≤ ε
where % is a distance
Output distributed from
π(θ)Pθ{%(y, z) < ε} ∝ π(θ|%(y, z) < ε)

MCMC and Likelihood-free Methods
Approximate Bayesian computation
ABC basics
A as approximative
When y is a continuous random variable, equality z = y is replacedwith a tolerance condition,
%(y, z) ≤ ε
where % is a distanceOutput distributed from
π(θ)Pθ{%(y, z) < ε} ∝ π(θ|%(y, z) < ε)

MCMC and Likelihood-free Methods
Approximate Bayesian computation
ABC basics
ABC algorithm
Algorithm 2 Likelihood-free rejection sampler 2
for i = 1 to N dorepeat
generate θ′ from the prior distribution π(·)generate z from the likelihood f(·|θ′)
until ρ{η(z), η(y)} ≤ εset θi = θ′
end for
where η(y) defines a (not necessarily sufficient) statistic

MCMC and Likelihood-free Methods
Approximate Bayesian computation
ABC basics
Output
The likelihood-free algorithm samples from the marginal in z of:
πε(θ, z|y) =π(θ)f(z|θ)IAε,y(z)∫
Aε,y×Θ π(θ)f(z|θ)dzdθ,
wheere Aε,y = {z ∈ D|ρ(η(z), η(y)) < ε}.
The idea behind ABC is that the summary statistics coupled with asmall tolerance should provide a good approximation of theposterior distribution:
πε(θ|y) =∫πε(θ, z|y)dz ≈ π(θ|y) .

MCMC and Likelihood-free Methods
Approximate Bayesian computation
ABC basics
Output
The likelihood-free algorithm samples from the marginal in z of:
πε(θ, z|y) =π(θ)f(z|θ)IAε,y(z)∫
Aε,y×Θ π(θ)f(z|θ)dzdθ,
wheere Aε,y = {z ∈ D|ρ(η(z), η(y)) < ε}.
The idea behind ABC is that the summary statistics coupled with asmall tolerance should provide a good approximation of theposterior distribution:
πε(θ|y) =∫πε(θ, z|y)dz ≈ π(θ|y) .

MCMC and Likelihood-free Methods
Approximate Bayesian computation
ABC basics
MA example
Back to the MA(q) model
xt = εt +q∑i=1
ϑiεt−i
Simple prior: uniform over the inverse [real and complex] roots in
Q(u) = 1−q∑i=1
ϑiui
under the identifiability conditions

MCMC and Likelihood-free Methods
Approximate Bayesian computation
ABC basics
MA example
Back to the MA(q) model
xt = εt +q∑i=1
ϑiεt−i
Simple prior: uniform prior over the identifiability zone, e.g.triangle for MA(2)

MCMC and Likelihood-free Methods
Approximate Bayesian computation
ABC basics
MA example (2)
ABC algorithm thus made of
1. picking a new value (ϑ1, ϑ2) in the triangle
2. generating an iid sequence (εt)−q<t≤T3. producing a simulated series (x′t)1≤t≤T
Distance: basic distance between the series
ρ((x′t)1≤t≤T , (xt)1≤t≤T ) =T∑t=1
(xt − x′t)2
or distance between summary statistics like the q autocorrelations
τj =T∑
t=j+1
xtxt−j

MCMC and Likelihood-free Methods
Approximate Bayesian computation
ABC basics
MA example (2)
ABC algorithm thus made of
1. picking a new value (ϑ1, ϑ2) in the triangle
2. generating an iid sequence (εt)−q<t≤T3. producing a simulated series (x′t)1≤t≤T
Distance: basic distance between the series
ρ((x′t)1≤t≤T , (xt)1≤t≤T ) =T∑t=1
(xt − x′t)2
or distance between summary statistics like the q autocorrelations
τj =T∑
t=j+1
xtxt−j

MCMC and Likelihood-free Methods
Approximate Bayesian computation
ABC basics
Comparison of distance impact
Evaluation of the tolerance on the ABC sample against bothdistances (ε = 100%, 10%, 1%, 0.1%) for an MA(2) model

MCMC and Likelihood-free Methods
Approximate Bayesian computation
ABC basics
Comparison of distance impact
0.0 0.2 0.4 0.6 0.8
01
23
4
θ1
−2.0 −1.0 0.0 0.5 1.0 1.5
0.00.5
1.01.5
θ2
Evaluation of the tolerance on the ABC sample against bothdistances (ε = 100%, 10%, 1%, 0.1%) for an MA(2) model

MCMC and Likelihood-free Methods
Approximate Bayesian computation
ABC basics
Comparison of distance impact
0.0 0.2 0.4 0.6 0.8
01
23
4
θ1
−2.0 −1.0 0.0 0.5 1.0 1.5
0.00.5
1.01.5
θ2
Evaluation of the tolerance on the ABC sample against bothdistances (ε = 100%, 10%, 1%, 0.1%) for an MA(2) model

MCMC and Likelihood-free Methods
Approximate Bayesian computation
ABC basics
Homonomy
The ABC algorithm is not to be confused with the ABC algorithm
The Artificial Bee Colony algorithm is a swarm based meta-heuristicalgorithm that was introduced by Karaboga in 2005 for optimizingnumerical problems. It was inspired by the intelligent foragingbehavior of honey bees. The algorithm is specifically based on themodel proposed by Tereshko and Loengarov (2005) for the foragingbehaviour of honey bee colonies. The model consists of threeessential components: employed and unemployed foraging bees, andfood sources. The first two components, employed and unemployedforaging bees, search for rich food sources (...) close to their hive.The model also defines two leading modes of behaviour (...):recruitment of foragers to rich food sources resulting in positivefeedback and abandonment of poor sources by foragers causingnegative feedback.
[Karaboga, Scholarpedia]

MCMC and Likelihood-free Methods
Approximate Bayesian computation
ABC basics
ABC advances
Simulating from the prior is often poor in efficiency
Either modify the proposal distribution on θ to increase the densityof x’s within the vicinity of y...
[Marjoram et al, 2003; Bortot et al., 2007, Sisson et al., 2007]
...or by viewing the problem as a conditional density estimationand by developing techniques to allow for larger ε
[Beaumont et al., 2002]
.....or even by including ε in the inferential framework [ABCµ][Ratmann et al., 2009]

MCMC and Likelihood-free Methods
Approximate Bayesian computation
ABC basics
ABC advances
Simulating from the prior is often poor in efficiencyEither modify the proposal distribution on θ to increase the densityof x’s within the vicinity of y...
[Marjoram et al, 2003; Bortot et al., 2007, Sisson et al., 2007]
...or by viewing the problem as a conditional density estimationand by developing techniques to allow for larger ε
[Beaumont et al., 2002]
.....or even by including ε in the inferential framework [ABCµ][Ratmann et al., 2009]

MCMC and Likelihood-free Methods
Approximate Bayesian computation
ABC basics
ABC advances
Simulating from the prior is often poor in efficiencyEither modify the proposal distribution on θ to increase the densityof x’s within the vicinity of y...
[Marjoram et al, 2003; Bortot et al., 2007, Sisson et al., 2007]
...or by viewing the problem as a conditional density estimationand by developing techniques to allow for larger ε
[Beaumont et al., 2002]
.....or even by including ε in the inferential framework [ABCµ][Ratmann et al., 2009]

MCMC and Likelihood-free Methods
Approximate Bayesian computation
ABC basics
ABC advances
Simulating from the prior is often poor in efficiencyEither modify the proposal distribution on θ to increase the densityof x’s within the vicinity of y...
[Marjoram et al, 2003; Bortot et al., 2007, Sisson et al., 2007]
...or by viewing the problem as a conditional density estimationand by developing techniques to allow for larger ε
[Beaumont et al., 2002]
.....or even by including ε in the inferential framework [ABCµ][Ratmann et al., 2009]

MCMC and Likelihood-free Methods
Approximate Bayesian computation
Alphabet soup
ABC-NP
Better usage of [prior] simulations byadjustement: instead of throwing awayθ′ such that ρ(η(z), η(y)) > ε, replaceθs with locally regressed
θ∗ = θ − {η(z)− η(y)}Tβ[Csillery et al., TEE, 2010]
where β is obtained by [NP] weighted least square regression on(η(z)− η(y)) with weights
Kδ {ρ(η(z), η(y))}
[Beaumont et al., 2002, Genetics]

MCMC and Likelihood-free Methods
Approximate Bayesian computation
Alphabet soup
ABC-MCMC
Markov chain (θ(t)) created via the transition function
θ(t+1) =
θ′ ∼ Kω(θ′|θ(t)) if x ∼ f(x|θ′) is such that x = y
and u ∼ U(0, 1) ≤ π(θ′)Kω(θ(t)|θ′)π(θ(t))Kω(θ′|θ(t)) ,
θ(t) otherwise,
has the posterior π(θ|y) as stationary distribution[Marjoram et al, 2003]

MCMC and Likelihood-free Methods
Approximate Bayesian computation
Alphabet soup
ABC-MCMC
Markov chain (θ(t)) created via the transition function
θ(t+1) =
θ′ ∼ Kω(θ′|θ(t)) if x ∼ f(x|θ′) is such that x = y
and u ∼ U(0, 1) ≤ π(θ′)Kω(θ(t)|θ′)π(θ(t))Kω(θ′|θ(t)) ,
θ(t) otherwise,
has the posterior π(θ|y) as stationary distribution[Marjoram et al, 2003]

MCMC and Likelihood-free Methods
Approximate Bayesian computation
Alphabet soup
ABC-MCMC (2)
Algorithm 3 Likelihood-free MCMC sampler
Use Algorithm 2 to get (θ(0), z(0))for t = 1 to N do
Generate θ′ from Kω
(·|θ(t−1)
),
Generate z′ from the likelihood f(·|θ′),Generate u from U[0,1],
if u ≤ π(θ′)Kω(θ(t−1)|θ′)π(θ(t−1)Kω(θ′|θ(t−1))
IAε,y(z′) then
set (θ(t), z(t)) = (θ′, z′)else
(θ(t), z(t))) = (θ(t−1), z(t−1)),end if
end for

MCMC and Likelihood-free Methods
Approximate Bayesian computation
Alphabet soup
Why does it work?
Acceptance probability that does not involve the calculation of thelikelihood and
πε(θ′, z′|y)πε(θ(t−1), z(t−1)|y)
× Kω(θ(t−1)|θ′)f(z(t−1)|θ(t−1))Kω(θ′|θ(t−1))f(z′|θ′)
=π(θ′) f(z′|θ′) IAε,y(z′)
π(θ(t−1)) f(z(t−1)|θ(t−1))IAε,y(z(t−1))
× Kω(θ(t−1)|θ′) f(z(t−1)|θ(t−1))Kω(θ′|θ(t−1)) f(z′|θ′)
=π(θ′)Kω(θ(t−1)|θ′)π(θ(t−1)Kω(θ′|θ(t−1))
IAε,y(z′) .

MCMC and Likelihood-free Methods
Approximate Bayesian computation
Alphabet soup
ABCµ
[Ratmann, Andrieu, Wiuf and Richardson, 2009, PNAS]
Use of a joint density
f(θ, ε|y) ∝ ξ(ε|y, θ)× πθ(θ)× πε(ε)
where y is the data, and ξ(ε|y, θ) is the prior predictive density ofρ(η(z), η(y)) given θ and x when z ∼ f(z|θ)
Warning! Replacement of ξ(ε|y, θ) with a non-parametric kernelapproximation.

MCMC and Likelihood-free Methods
Approximate Bayesian computation
Alphabet soup
ABCµ
[Ratmann, Andrieu, Wiuf and Richardson, 2009, PNAS]
Use of a joint density
f(θ, ε|y) ∝ ξ(ε|y, θ)× πθ(θ)× πε(ε)
where y is the data, and ξ(ε|y, θ) is the prior predictive density ofρ(η(z), η(y)) given θ and x when z ∼ f(z|θ)Warning! Replacement of ξ(ε|y, θ) with a non-parametric kernelapproximation.

MCMC and Likelihood-free Methods
Approximate Bayesian computation
Alphabet soup
ABCµ details
Multidimensional distances ρk (k = 1, . . . ,K) and errorsεk = ρk(ηk(z), ηk(y)), with
εk ∼ ξk(ε|y, θ) ≈ ξk(ε|y, θ) =1
Bhk
∑b
K[{εk−ρk(ηk(zb), ηk(y))}/hk]
then used in replacing ξ(ε|y, θ) with mink ξk(ε|y, θ)
ABCµ involves acceptance probability
π(θ′, ε′)π(θ, ε)
q(θ′, θ)q(ε′, ε)q(θ, θ′)q(ε, ε′)
mink ξk(ε′|y, θ′)mink ξk(ε|y, θ)

MCMC and Likelihood-free Methods
Approximate Bayesian computation
Alphabet soup
ABCµ details
Multidimensional distances ρk (k = 1, . . . ,K) and errorsεk = ρk(ηk(z), ηk(y)), with
εk ∼ ξk(ε|y, θ) ≈ ξk(ε|y, θ) =1
Bhk
∑b
K[{εk−ρk(ηk(zb), ηk(y))}/hk]
then used in replacing ξ(ε|y, θ) with mink ξk(ε|y, θ)ABCµ involves acceptance probability
π(θ′, ε′)π(θ, ε)
q(θ′, θ)q(ε′, ε)q(θ, θ′)q(ε, ε′)
mink ξk(ε′|y, θ′)mink ξk(ε|y, θ)

MCMC and Likelihood-free Methods
Approximate Bayesian computation
Alphabet soup
ABCµ multiple errors
[ c© Ratmann et al., PNAS, 2009]

MCMC and Likelihood-free Methods
Approximate Bayesian computation
Alphabet soup
ABCµ for model choice
[ c© Ratmann et al., PNAS, 2009]

MCMC and Likelihood-free Methods
Approximate Bayesian computation
Alphabet soup
Questions about ABCµ
For each model under comparison, marginal posterior on ε used toassess the fit of the model (HPD includes 0 or not).
I Is the data informative about ε? [Identifiability]
I How is the prior π(ε) impacting the comparison?
I How is using both ξ(ε|x0, θ) and πε(ε) compatible with astandard probability model? [remindful of Wilkinson]
I Where is the penalisation for complexity in the modelcomparison?
[X, Mengersen & Chen, 2010, PNAS]

MCMC and Likelihood-free Methods
Approximate Bayesian computation
Alphabet soup
Questions about ABCµ
For each model under comparison, marginal posterior on ε used toassess the fit of the model (HPD includes 0 or not).
I Is the data informative about ε? [Identifiability]
I How is the prior π(ε) impacting the comparison?
I How is using both ξ(ε|x0, θ) and πε(ε) compatible with astandard probability model? [remindful of Wilkinson]
I Where is the penalisation for complexity in the modelcomparison?
[X, Mengersen & Chen, 2010, PNAS]

MCMC and Likelihood-free Methods
Approximate Bayesian computation
Alphabet soup
ABC-PRC
Another sequential version producing a sequence of Markov
transition kernels Kt and of samples (θ(t)1 , . . . , θ
(t)N ) (1 ≤ t ≤ T )
ABC-PRC Algorithm
1. Pick a θ? is selected at random among the previous θ(t−1)i ’s
with probabilities ω(t−1)i (1 ≤ i ≤ N).
2. Generateθ
(t)i ∼ Kt(θ|θ?) , x ∼ f(x|θ(t)
i ) ,
3. Check that %(x, y) < ε, otherwise start again.
[Sisson et al., 2007]

MCMC and Likelihood-free Methods
Approximate Bayesian computation
Alphabet soup
ABC-PRC
Another sequential version producing a sequence of Markov
transition kernels Kt and of samples (θ(t)1 , . . . , θ
(t)N ) (1 ≤ t ≤ T )
ABC-PRC Algorithm
1. Pick a θ? is selected at random among the previous θ(t−1)i ’s
with probabilities ω(t−1)i (1 ≤ i ≤ N).
2. Generateθ
(t)i ∼ Kt(θ|θ?) , x ∼ f(x|θ(t)
i ) ,
3. Check that %(x, y) < ε, otherwise start again.
[Sisson et al., 2007]

MCMC and Likelihood-free Methods
Approximate Bayesian computation
Alphabet soup
Why PRC?
Partial rejection control: Resample from a population of weightedparticles by pruning away particles with weights below threshold C,replacing them by new particles obtained by propagating anexisting particle by an SMC step and modifying the weightsaccordinly.
[Liu, 2001]
PRC justification in ABC-PRC:
Suppose we then implement the PRC algorithm for somec > 0 such that only identically zero weights are smallerthan c
Trouble is, there is no such c...

MCMC and Likelihood-free Methods
Approximate Bayesian computation
Alphabet soup
Why PRC?
Partial rejection control: Resample from a population of weightedparticles by pruning away particles with weights below threshold C,replacing them by new particles obtained by propagating anexisting particle by an SMC step and modifying the weightsaccordinly.
[Liu, 2001]PRC justification in ABC-PRC:
Suppose we then implement the PRC algorithm for somec > 0 such that only identically zero weights are smallerthan c
Trouble is, there is no such c...

MCMC and Likelihood-free Methods
Approximate Bayesian computation
Alphabet soup
ABC-PRC weight
Probability ω(t)i computed as
ω(t)i ∝ π(θ(t)
i )Lt−1(θ?|θ(t)i ){π(θ?)Kt(θ
(t)i |θ
?)}−1 ,
where Lt−1 is an arbitrary transition kernel.
In caseLt−1(θ′|θ) = Kt(θ|θ′) ,
all weights are equal under a uniform prior.Inspired from Del Moral et al. (2006), who use backward kernelsLt−1 in SMC to achieve unbiasedness

MCMC and Likelihood-free Methods
Approximate Bayesian computation
Alphabet soup
ABC-PRC weight
Probability ω(t)i computed as
ω(t)i ∝ π(θ(t)
i )Lt−1(θ?|θ(t)i ){π(θ?)Kt(θ
(t)i |θ
?)}−1 ,
where Lt−1 is an arbitrary transition kernel.In case
Lt−1(θ′|θ) = Kt(θ|θ′) ,
all weights are equal under a uniform prior.
Inspired from Del Moral et al. (2006), who use backward kernelsLt−1 in SMC to achieve unbiasedness

MCMC and Likelihood-free Methods
Approximate Bayesian computation
Alphabet soup
ABC-PRC weight
Probability ω(t)i computed as
ω(t)i ∝ π(θ(t)
i )Lt−1(θ?|θ(t)i ){π(θ?)Kt(θ
(t)i |θ
?)}−1 ,
where Lt−1 is an arbitrary transition kernel.In case
Lt−1(θ′|θ) = Kt(θ|θ′) ,
all weights are equal under a uniform prior.Inspired from Del Moral et al. (2006), who use backward kernelsLt−1 in SMC to achieve unbiasedness

MCMC and Likelihood-free Methods
Approximate Bayesian computation
Alphabet soup
ABC-PRC bias
Lack of unbiasedness of the method
Joint density of the accepted pair (θ(t−1), θ(t)) proportional to
π(θ(t−1)|y)Kt(θ(t)|θ(t−1)
)f(y|θ(t)) ,
For an arbitrary function h(θ), E[ωth(θ(t))] proportional to
ZZh(θ
(t))π(θ(t))Lt−1(θ(t−1)|θ(t))π(θ(t−1))Kt(θ(t)|θ(t−1))
π(θ(t−1)|y)Kt(θ(t)|θ(t−1)
)f(y|θ(t))dθ(t−1)dθ(t)
∝ZZ
h(θ(t)
)π(θ(t))Lt−1(θ(t−1)|θ(t))π(θ(t−1))Kt(θ(t)|θ(t−1))
π(θ(t−1)
)f(y|θ(t−1))
×Kt(θ(t)|θ(t−1))f(y|θ(t))dθ(t−1)dθ(t)
∝Zh(θ
(t))π(θ
(t)|y)Z
Lt−1(θ(t−1)|θ(t))f(y|θ(t−1)
)dθ(t−1)ff
dθ(t) .

MCMC and Likelihood-free Methods
Approximate Bayesian computation
Alphabet soup
ABC-PRC bias
Lack of unbiasedness of the method
Joint density of the accepted pair (θ(t−1), θ(t)) proportional to
π(θ(t−1)|y)Kt(θ(t)|θ(t−1)
)f(y|θ(t)) ,
For an arbitrary function h(θ), E[ωth(θ(t))] proportional to
ZZh(θ
(t))π(θ(t))Lt−1(θ(t−1)|θ(t))π(θ(t−1))Kt(θ(t)|θ(t−1))
π(θ(t−1)|y)Kt(θ(t)|θ(t−1)
)f(y|θ(t))dθ(t−1)dθ(t)
∝ZZ
h(θ(t)
)π(θ(t))Lt−1(θ(t−1)|θ(t))π(θ(t−1))Kt(θ(t)|θ(t−1))
π(θ(t−1)
)f(y|θ(t−1))
×Kt(θ(t)|θ(t−1))f(y|θ(t))dθ(t−1)dθ(t)
∝Zh(θ
(t))π(θ
(t)|y)Z
Lt−1(θ(t−1)|θ(t))f(y|θ(t−1)
)dθ(t−1)ff
dθ(t) .

MCMC and Likelihood-free Methods
Approximate Bayesian computation
Alphabet soup
A mixture example (1)
Toy model of Sisson et al. (2007): if
θ ∼ U(−10, 10) , x|θ ∼ 0.5N (θ, 1) + 0.5N (θ, 1/100) ,
then the posterior distribution associated with y = 0 is the normalmixture
θ|y = 0 ∼ 0.5N (0, 1) + 0.5N (0, 1/100)
restricted to [−10, 10].Furthermore, true target available as
π(θ||x| < ε) ∝ Φ(ε−θ)−Φ(−ε−θ)+Φ(10(ε−θ))−Φ(−10(ε+θ)) .

MCMC and Likelihood-free Methods
Approximate Bayesian computation
Alphabet soup
“Ugly, squalid graph...”
θθ
−3 −1 1 3
0.00.2
0.40.6
0.81.0
θθ
−3 −1 1 3
0.00.2
0.40.6
0.81.0
θθ
−3 −1 1 3
0.00.2
0.40.6
0.81.0
θθ
−3 −1 1 3
0.00.2
0.40.6
0.81.0
θθ
−3 −1 1 3
0.00.2
0.40.6
0.81.0
θθ
−3 −1 1 3
0.00.2
0.40.6
0.81.0
θθ
−3 −1 1 3
0.00.2
0.40.6
0.81.0
θθ
−3 −1 1 3
0.00.2
0.40.6
0.81.0
θθ
−3 −1 1 3
0.00.2
0.40.6
0.81.0
θθ
−3 −1 1 3
0.00.2
0.40.6
0.81.0
Comparison of τ = 0.15 and τ = 1/0.15 in Kt

MCMC and Likelihood-free Methods
Approximate Bayesian computation
Alphabet soup
A PMC version
Use of the same kernel idea as ABC-PRC but with IS correctionGenerate a sample at iteration t by
πt(θ(t)) ∝N∑j=1
ω(t−1)j Kt(θ(t)|θ(t−1)
j )
modulo acceptance of the associated xt, and use an importance
weight associated with an accepted simulation θ(t)i
ω(t)i ∝ π(θ(t)
i )/πt(θ
(t)i ) .
c© Still likelihood free[Beaumont et al., 2008, arXiv:0805.2256]

MCMC and Likelihood-free Methods
Approximate Bayesian computation
Alphabet soup
The ABC-PMC algorithm
Given a decreasing sequence of approximation levels ε1 ≥ . . . ≥ εT ,
1. At iteration t = 1,
For i = 1, ..., NSimulate θ
(1)i ∼ π(θ) and x ∼ f(x|θ(1)i ) until %(x, y) < ε1
Set ω(1)i = 1/N
Take τ2 as twice the empirical variance of the θ(1)i ’s
2. At iteration 2 ≤ t ≤ T ,
For i = 1, ..., N , repeat
Pick θ?i from the θ(t−1)j ’s with probabilities ω
(t−1)j
generate θ(t)i |θ
?i ∼ N (θ?i , σ
2t ) and x ∼ f(x|θ(t)i )
until %(x, y) < εt
Set ω(t)i ∝ π(θ(t)i )/
∑Nj=1 ω
(t−1)j ϕ
(σ−1
t
{θ(t)i − θ
(t−1)j )
})Take τ2
t+1 as twice the weighted empirical variance of the θ(t)i ’s

MCMC and Likelihood-free Methods
Approximate Bayesian computation
Alphabet soup
Sequential Monte Carlo
SMC is a simulation technique to approximate a sequence ofrelated probability distributions πn with π0 “easy” and πT astarget.Iterated IS as PMC : particles moved from time n to time n viakernel Kn and use of a sequence of extended targets πn
πn(z0:n) = πn(zn)n∏j=0
Lj(zj+1, zj)
where the Lj ’s are backward Markov kernels [check that πn(zn) isa marginal]
[Del Moral, Doucet & Jasra, Series B, 2006]

MCMC and Likelihood-free Methods
Approximate Bayesian computation
Alphabet soup
Sequential Monte Carlo (2)
Algorithm 4 SMC sampler
sample z(0)i ∼ γ0(x) (i = 1, . . . , N)
compute weights w(0)i = π0(z(0)
i ))/γ0(z(0)i )
for t = 1 to N doif ESS(w(t−1)) < NT then
resample N particles z(t−1) and set weights to 1end ifgenerate z
(t−1)i ∼ Kt(z
(t−1)i , ·) and set weights to
w(t)i = W
(t−1)i−1
πt(z(t)i ))Lt−1(z(t)
i ), z(t−1)i ))
πt−1(z(t−1)i ))Kt(z
(t−1)i ), z(t)
i ))
end for
[Del Moral, Doucet & Jasra, Series B, 2006]

MCMC and Likelihood-free Methods
Approximate Bayesian computation
Alphabet soup
ABC-SMC
[Del Moral, Doucet & Jasra, 2009]
True derivation of an SMC-ABC algorithmUse of a kernel Kn associated with target πεn and derivation of thebackward kernel
Ln−1(z, z′) =πεn(z′)Kn(z′, z)
πn(z)
Update of the weights
win ∝ wi(n−1)
∑Mm=1 IAεn (xmin)∑M
m=1 IAεn−1(xmi(n−1))
when xmin ∼ K(xi(n−1), ·)

MCMC and Likelihood-free Methods
Approximate Bayesian computation
Alphabet soup
ABC-SMCM
Modification: Makes M repeated simulations of the pseudo-data zgiven the parameter, rather than using a single [M = 1]simulation, leading to weight that is proportional to the number ofaccepted zis
ω(θ) =1M
M∑i=1
Iρ(η(y),η(zi))<ε
[limit in M means exact simulation from (tempered) target]

MCMC and Likelihood-free Methods
Approximate Bayesian computation
Alphabet soup
Properties of ABC-SMC
The ABC-SMC method properly uses a backward kernel L(z, z′) tosimplify the importance weight and to remove the dependence onthe unknown likelihood from this weight. Update of importanceweights is reduced to the ratio of the proportions of survivingparticlesMajor assumption: the forward kernel K is supposed to beinvariant against the true target [tempered version of the trueposterior]
Adaptivity in ABC-SMC algorithm only found in on-lineconstruction of the thresholds εt, slowly enough to keep a largenumber of accepted transitions

MCMC and Likelihood-free Methods
Approximate Bayesian computation
Alphabet soup
Properties of ABC-SMC
The ABC-SMC method properly uses a backward kernel L(z, z′) tosimplify the importance weight and to remove the dependence onthe unknown likelihood from this weight. Update of importanceweights is reduced to the ratio of the proportions of survivingparticlesMajor assumption: the forward kernel K is supposed to beinvariant against the true target [tempered version of the trueposterior]Adaptivity in ABC-SMC algorithm only found in on-lineconstruction of the thresholds εt, slowly enough to keep a largenumber of accepted transitions

MCMC and Likelihood-free Methods
Approximate Bayesian computation
Alphabet soup
A mixture example (2)
Recovery of the target, whether using a fixed standard deviation ofτ = 0.15 or τ = 1/0.15, or a sequence of adaptive τt’s.
θθ
−3 −2 −1 0 1 2 3
0.0
0.2
0.4
0.6
0.8
1.0
θθ
−3 −2 −1 0 1 2 3
0.0
0.2
0.4
0.6
0.8
1.0
θθ
−3 −2 −1 0 1 2 3
0.0
0.2
0.4
0.6
0.8
1.0
θθ
−3 −2 −1 0 1 2 3
0.0
0.2
0.4
0.6
0.8
1.0
θθ
−3 −2 −1 0 1 2 3
0.0
0.2
0.4
0.6
0.8
1.0

MCMC and Likelihood-free Methods
Approximate Bayesian computation
Alphabet soup
Wilkinson’s exact BC
Wilkinson (2008) replaces the ABC approximation error(i.e. non-zero tolerance) in with an exact simulation from acontrolled approximation to the target, a convolution of the trueposterior with an arbitrary kernel function
πε(θ, z|y) =π(θ)f(z|θ)Kε(y − z)∫π(θ)f(z|θ)Kε(y − z)dzdθ
,
where Kε is a kernel parameterised by a bandwidth ε.
I Interesting perspective in that outcome is completelycontrolled
I Link with ABCµ and assuming y is observed with ameasurement error with density Kε
I Relates to the theory of model approximation[Kennedy & O’Hagan, 2001]

MCMC and Likelihood-free Methods
Approximate Bayesian computation
Alphabet soup
Wilkinson’s exact BC
Wilkinson (2008) replaces the ABC approximation error(i.e. non-zero tolerance) in with an exact simulation from acontrolled approximation to the target, a convolution of the trueposterior with an arbitrary kernel function
πε(θ, z|y) =π(θ)f(z|θ)Kε(y − z)∫π(θ)f(z|θ)Kε(y − z)dzdθ
,
where Kε is a kernel parameterised by a bandwidth ε.
I Requires Kε to be bounded
I True approximation error never assessed
I Requires a modification of the standard ABC algorithms

MCMC and Likelihood-free Methods
Approximate Bayesian computation
Alphabet soup
Semi-automatic ABC
Fearnhead and Prangle (2010) study ABC and the selection of thesummary statistic in close proximity to Wilkinson’s proposal
ABC then considered from a purely inferential viewpoint andcalibrated for estimation purposes.Use of a randomised (or ‘noisy’) version of the summary statistics
η(y) = η(y) + τε
Derivation of a well-calibrated version of ABC, i.e. an algorithmthat gives proper predictions for the distribution associated withthis randomised summary statistic.
[calibration constraint: ABCapproximation with same posterior mean as the true randomisedposterior.]

MCMC and Likelihood-free Methods
Approximate Bayesian computation
Alphabet soup
Semi-automatic ABC
Fearnhead and Prangle (2010) study ABC and the selection of thesummary statistic in close proximity to Wilkinson’s proposal
ABC then considered from a purely inferential viewpoint andcalibrated for estimation purposes.Use of a randomised (or ‘noisy’) version of the summary statistics
η(y) = η(y) + τε
Derivation of a well-calibrated version of ABC, i.e. an algorithmthat gives proper predictions for the distribution associated withthis randomised summary statistic. [calibration constraint: ABCapproximation with same posterior mean as the true randomisedposterior.]

MCMC and Likelihood-free Methods
Approximate Bayesian computation
Alphabet soup
Summary statistics
Optimality of the posterior expectations of the parameters ofinterest as summary statistics!
Use of the standard quadratic loss function
(θ − θ0)TA(θ − θ0) .

MCMC and Likelihood-free Methods
Approximate Bayesian computation
Alphabet soup
Summary statistics
Optimality of the posterior expectations of the parameters ofinterest as summary statistics!Use of the standard quadratic loss function
(θ − θ0)TA(θ − θ0) .

MCMC and Likelihood-free Methods
Approximate Bayesian computation
Calibration of ABC
Which summary?
Fundamental difficulty of the choice of the summary statistic whenthere is no non-trivial sufficient statistics [except when done by theexperimenters in the field]
Starting from a large collection of summary statistics is available,Joyce and Marjoram (2008) consider the sequential inclusion intothe ABC target, with a stopping rule based on a likelihood ratiotest.
I Does not taking into account the sequential nature of the tests
I Depends on parameterisation
I Order of inclusion matters.

MCMC and Likelihood-free Methods
Approximate Bayesian computation
Calibration of ABC
Which summary?
Fundamental difficulty of the choice of the summary statistic whenthere is no non-trivial sufficient statistics [except when done by theexperimenters in the field]Starting from a large collection of summary statistics is available,Joyce and Marjoram (2008) consider the sequential inclusion intothe ABC target, with a stopping rule based on a likelihood ratiotest.
I Does not taking into account the sequential nature of the tests
I Depends on parameterisation
I Order of inclusion matters.

MCMC and Likelihood-free Methods
Approximate Bayesian computation
Calibration of ABC
Which summary?
Fundamental difficulty of the choice of the summary statistic whenthere is no non-trivial sufficient statistics [except when done by theexperimenters in the field]Starting from a large collection of summary statistics is available,Joyce and Marjoram (2008) consider the sequential inclusion intothe ABC target, with a stopping rule based on a likelihood ratiotest.
I Does not taking into account the sequential nature of the tests
I Depends on parameterisation
I Order of inclusion matters.

MCMC and Likelihood-free Methods
Approximate Bayesian computation
Calibration of ABC
A connected Monte Carlo study
I Repeating simulations of the pseudo-data per simulated parameterdoes not improve approximation
I Tolerance level ε does not seem to be highly influential
I Choice of distance / summary statistics / calibration factorsare paramount to successful approximation
I ABC-SMC outperforms ABC-MCMC
[Mckinley, Cook, Deardon, 2009]

MCMC and Likelihood-free Methods
Approximate Bayesian computation
Calibration of ABC
A Brave New World?!

MCMC and Likelihood-free Methods
ABC for model choice
ABC for model choice
Computational issues in Bayesian statistics
The Metropolis-Hastings Algorithm
The Gibbs Sampler
Population Monte Carlo
Approximate Bayesian computation
ABC for model choiceModel choiceGibbs random fieldsModel choice via ABCIllustrations

MCMC and Likelihood-free Methods
ABC for model choice
Model choice
Bayesian model choice
Several models M1,M2, . . . are considered simultaneously for adataset y and the model index M is part of the inference.Use of a prior distribution. π(M = m), plus a prior distribution onthe parameter conditional on the value m of the model index,πm(θm)Goal is to derive the posterior distribution of M , challengingcomputational target when models are complex.

MCMC and Likelihood-free Methods
ABC for model choice
Model choice
Generic ABC for model choice
Algorithm 5 Likelihood-free model choice sampler (ABC-MC)
for t = 1 to T dorepeat
Generate m from the prior π(M = m)Generate θm from the prior πm(θm)Generate z from the model fm(z|θm)
until ρ{η(z), η(y)} < εSet m(t) = m and θ(t) = θm
end for

MCMC and Likelihood-free Methods
ABC for model choice
Model choice
ABC estimates
Posterior probability π(M = m|y) approximated by the frequencyof acceptances from model m
1T
T∑t=1
Im(t)=m .
Issues with implementation:
I should tolerances ε be the same for all models?
I should summary statistics vary across models (incl. theirdimension)?
I should the distance measure ρ vary as well?
Extension to a weighted polychotomous logistic regression estimateof π(M = m|y), with non-parametric kernel weights
[Cornuet et al., DIYABC, 2009]

MCMC and Likelihood-free Methods
ABC for model choice
Model choice
ABC estimates
Posterior probability π(M = m|y) approximated by the frequencyof acceptances from model m
1T
T∑t=1
Im(t)=m .
Issues with implementation:
I should tolerances ε be the same for all models?
I should summary statistics vary across models (incl. theirdimension)?
I should the distance measure ρ vary as well?
Extension to a weighted polychotomous logistic regression estimateof π(M = m|y), with non-parametric kernel weights
[Cornuet et al., DIYABC, 2009]

MCMC and Likelihood-free Methods
ABC for model choice
Model choice
The Great ABC controversy
On-going controvery in phylogeographic genetics about the validityof using ABC for testing
Against: Templeton, 2008,2009, 2010a, 2010b, 2010cargues that nested hypothesescannot have higher probabilitiesthan nesting hypotheses (!)

MCMC and Likelihood-free Methods
ABC for model choice
Model choice
The Great ABC controversy
On-going controvery in phylogeographic genetics about the validityof using ABC for testing
Against: Templeton, 2008,2009, 2010a, 2010b, 2010cargues that nested hypothesescannot have higher probabilitiesthan nesting hypotheses (!)
Replies: Fagundes et al., 2008,Beaumont et al., 2010, Berger etal., 2010, Csillery et al., 2010point out that the criticisms areaddressed at [Bayesian]model-based inference and havenothing to do with ABC...

MCMC and Likelihood-free Methods
ABC for model choice
Gibbs random fields
Gibbs random fields
Gibbs distribution
The rv y = (y1, . . . , yn) is a Gibbs random field associated withthe graph G if
f(y) =1Z
exp
{−∑c∈C
Vc(yc)
},
where Z is the normalising constant, C is the set of cliques of G
and Vc is any function also called potentialU(y) =
∑c∈C Vc(yc) is the energy function
c© Z is usually unavailable in closed form

MCMC and Likelihood-free Methods
ABC for model choice
Gibbs random fields
Gibbs random fields
Gibbs distribution
The rv y = (y1, . . . , yn) is a Gibbs random field associated withthe graph G if
f(y) =1Z
exp
{−∑c∈C
Vc(yc)
},
where Z is the normalising constant, C is the set of cliques of G
and Vc is any function also called potentialU(y) =
∑c∈C Vc(yc) is the energy function
c© Z is usually unavailable in closed form

MCMC and Likelihood-free Methods
ABC for model choice
Gibbs random fields
Potts model
Potts model
Vc(y) is of the form
Vc(y) = θS(y) = θ∑l∼i
δyl=yi
where l∼i denotes a neighbourhood structure
In most realistic settings, summation
Zθ =∑x∈X
exp{θTS(x)}
involves too many terms to be manageable and numericalapproximations cannot always be trusted
[Cucala, Marin, CPR & Titterington, 2009]

MCMC and Likelihood-free Methods
ABC for model choice
Gibbs random fields
Potts model
Potts model
Vc(y) is of the form
Vc(y) = θS(y) = θ∑l∼i
δyl=yi
where l∼i denotes a neighbourhood structure
In most realistic settings, summation
Zθ =∑x∈X
exp{θTS(x)}
involves too many terms to be manageable and numericalapproximations cannot always be trusted
[Cucala, Marin, CPR & Titterington, 2009]

MCMC and Likelihood-free Methods
ABC for model choice
Model choice via ABC
Bayesian Model Choice
Comparing a model with potential S0 taking values in Rp0 versus amodel with potential S1 taking values in Rp1 can be done throughthe Bayes factor corresponding to the priors π0 and π1 on eachparameter space
Bm0/m1(x) =
∫exp{θT
0 S0(x)}/Zθ0,0π0(dθ0)∫
exp{θT1 S1(x)}/Zθ1,1
π1(dθ1)
Use of Jeffreys’ scale to select most appropriate model

MCMC and Likelihood-free Methods
ABC for model choice
Model choice via ABC
Bayesian Model Choice
Comparing a model with potential S0 taking values in Rp0 versus amodel with potential S1 taking values in Rp1 can be done throughthe Bayes factor corresponding to the priors π0 and π1 on eachparameter space
Bm0/m1(x) =
∫exp{θT
0 S0(x)}/Zθ0,0π0(dθ0)∫
exp{θT1 S1(x)}/Zθ1,1
π1(dθ1)
Use of Jeffreys’ scale to select most appropriate model

MCMC and Likelihood-free Methods
ABC for model choice
Model choice via ABC
Neighbourhood relations
Choice to be made between M neighbourhood relations
im∼ i′ (0 ≤ m ≤M − 1)
withSm(x) =
∑im∼i′
I{xi=xi′}
driven by the posterior probabilities of the models.

MCMC and Likelihood-free Methods
ABC for model choice
Model choice via ABC
Model index
Formalisation via a model index M that appears as a newparameter with prior distribution π(M = m) andπ(θ|M = m) = πm(θm)
Computational target:
P(M = m|x) ∝∫
Θm
fm(x|θm)πm(θm) dθm π(M = m) ,

MCMC and Likelihood-free Methods
ABC for model choice
Model choice via ABC
Model index
Formalisation via a model index M that appears as a newparameter with prior distribution π(M = m) andπ(θ|M = m) = πm(θm)Computational target:
P(M = m|x) ∝∫
Θm
fm(x|θm)πm(θm) dθm π(M = m) ,

MCMC and Likelihood-free Methods
ABC for model choice
Model choice via ABC
Sufficient statistics
By definition, if S(x) sufficient statistic for the joint parameters(M, θ0, . . . , θM−1),
P(M = m|x) = P(M = m|S(x)) .
For each model m, own sufficient statistic Sm(·) andS(·) = (S0(·), . . . , SM−1(·)) also sufficient.For Gibbs random fields,
x|M = m ∼ fm(x|θm) = f1m(x|S(x))f2
m(S(x)|θm)
=1
n(S(x))f2m(S(x)|θm)
wheren(S(x)) = ] {x ∈ X : S(x) = S(x)}
c© S(x) is therefore also sufficient for the joint parameters[Specific to Gibbs random fields!]

MCMC and Likelihood-free Methods
ABC for model choice
Model choice via ABC
Sufficient statistics
By definition, if S(x) sufficient statistic for the joint parameters(M, θ0, . . . , θM−1),
P(M = m|x) = P(M = m|S(x)) .
For each model m, own sufficient statistic Sm(·) andS(·) = (S0(·), . . . , SM−1(·)) also sufficient.
For Gibbs random fields,
x|M = m ∼ fm(x|θm) = f1m(x|S(x))f2
m(S(x)|θm)
=1
n(S(x))f2m(S(x)|θm)
wheren(S(x)) = ] {x ∈ X : S(x) = S(x)}
c© S(x) is therefore also sufficient for the joint parameters[Specific to Gibbs random fields!]

MCMC and Likelihood-free Methods
ABC for model choice
Model choice via ABC
Sufficient statistics
By definition, if S(x) sufficient statistic for the joint parameters(M, θ0, . . . , θM−1),
P(M = m|x) = P(M = m|S(x)) .
For each model m, own sufficient statistic Sm(·) andS(·) = (S0(·), . . . , SM−1(·)) also sufficient.For Gibbs random fields,
x|M = m ∼ fm(x|θm) = f1m(x|S(x))f2
m(S(x)|θm)
=1
n(S(x))f2m(S(x)|θm)
wheren(S(x)) = ] {x ∈ X : S(x) = S(x)}
c© S(x) is therefore also sufficient for the joint parameters[Specific to Gibbs random fields!]

MCMC and Likelihood-free Methods
ABC for model choice
Model choice via ABC
ABC model choice Algorithm
ABC-MCI Generate m∗ from the prior π(M = m).
I Generate θ∗m∗ from the prior πm∗(·).
I Generate x∗ from the model fm∗(·|θ∗m∗).
I Compute the distance ρ(S(x0), S(x∗)).
I Accept (θ∗m∗ ,m∗) if ρ(S(x0), S(x∗)) < ε.
Note When ε = 0 the algorithm is exact

MCMC and Likelihood-free Methods
ABC for model choice
Model choice via ABC
ABC approximation to the Bayes factor
Frequency ratio:
BFm0/m1(x0) =
P(M = m0|x0)P(M = m1|x0)
× π(M = m1)π(M = m0)
=]{mi∗ = m0}]{mi∗ = m1}
× π(M = m1)π(M = m0)
,
replaced with
BFm0/m1(x0) =
1 + ]{mi∗ = m0}1 + ]{mi∗ = m1}
× π(M = m1)π(M = m0)
to avoid indeterminacy (also Bayes estimate).

MCMC and Likelihood-free Methods
ABC for model choice
Model choice via ABC
ABC approximation to the Bayes factor
Frequency ratio:
BFm0/m1(x0) =
P(M = m0|x0)P(M = m1|x0)
× π(M = m1)π(M = m0)
=]{mi∗ = m0}]{mi∗ = m1}
× π(M = m1)π(M = m0)
,
replaced with
BFm0/m1(x0) =
1 + ]{mi∗ = m0}1 + ]{mi∗ = m1}
× π(M = m1)π(M = m0)
to avoid indeterminacy (also Bayes estimate).

MCMC and Likelihood-free Methods
ABC for model choice
Illustrations
Toy example
iid Bernoulli model versus two-state first-order Markov chain, i.e.
f0(x|θ0) = exp
(θ0
n∑i=1
I{xi=1}
)/{1 + exp(θ0)}n ,
versus
f1(x|θ1) =12
exp
(θ1
n∑i=2
I{xi=xi−1}
)/{1 + exp(θ1)}n−1 ,
with priors θ0 ∼ U(−5, 5) and θ1 ∼ U(0, 6) (inspired by “phasetransition” boundaries).

MCMC and Likelihood-free Methods
ABC for model choice
Illustrations
Toy example (2)
−40 −20 0 10
−50
5
BF01
BF01
−40 −20 0 10−10
−50
510
BF01
BF01
(left) Comparison of the true BFm0/m1(x0) with BFm0/m1
(x0)(in logs) over 2, 000 simulations and 4.106 proposals from theprior. (right) Same when using tolerance ε corresponding to the1% quantile on the distances.

MCMC and Likelihood-free Methods
ABC for model choice
Illustrations
Protein folding
Superposition of the native structure (grey) with the ST1structure (red.), the ST2 structure (orange), the ST3 structure(green), and the DT structure (blue).

MCMC and Likelihood-free Methods
ABC for model choice
Illustrations
Protein folding (2)
% seq . Id. TM-score FROST score
1i5nA (ST1) 32 0.86 75.31ls1A1 (ST2) 5 0.42 8.91jr8A (ST3) 4 0.24 8.91s7oA (DT) 10 0.08 7.8
Characteristics of dataset. % seq. Id.: percentage of identity withthe query sequence. TM-score: similarity between predicted andnative structure (uncertainty between 0.17 and 0.4) FROST score:quality of alignment of the query onto the candidate structure(uncertainty between 7 and 9).

MCMC and Likelihood-free Methods
ABC for model choice
Illustrations
Protein folding (3)
NS/ST1 NS/ST2 NS/ST3 NS/DT
BF 1.34 1.22 2.42 2.76P(M = NS|x0) 0.573 0.551 0.708 0.734
Estimates of the Bayes factors between model NS and modelsST1, ST2, ST3, and DT, and corresponding posteriorprobabilities of model NS based on an ABC-MC algorithm using1.2 106 simulations and a tolerance ε equal to the 1% quantile ofthe distances.