
Matthias Zwicker University of Bern Fall...
63
Computational Photography Matthias Zwicker University of Bern University of Bern Fall 2010
Transcript of Matthias Zwicker University of Bern Fall...

Computational Photography
Matthias ZwickerUniversity of BernUniversity of Bern
Fall 2010

TodayWarping and morphing
• Introduction
Warping• Warping
• MorphingMorphing
• Resampling

Introduction• Image warping: deform an image
P i d f iPerspective deformation

Introduction• Image warping: deform an image
Free-form deformationFree form deformationhttp://www.cs.technion.ac.il/~weber/Publications/Complex-Coordinates/index.html
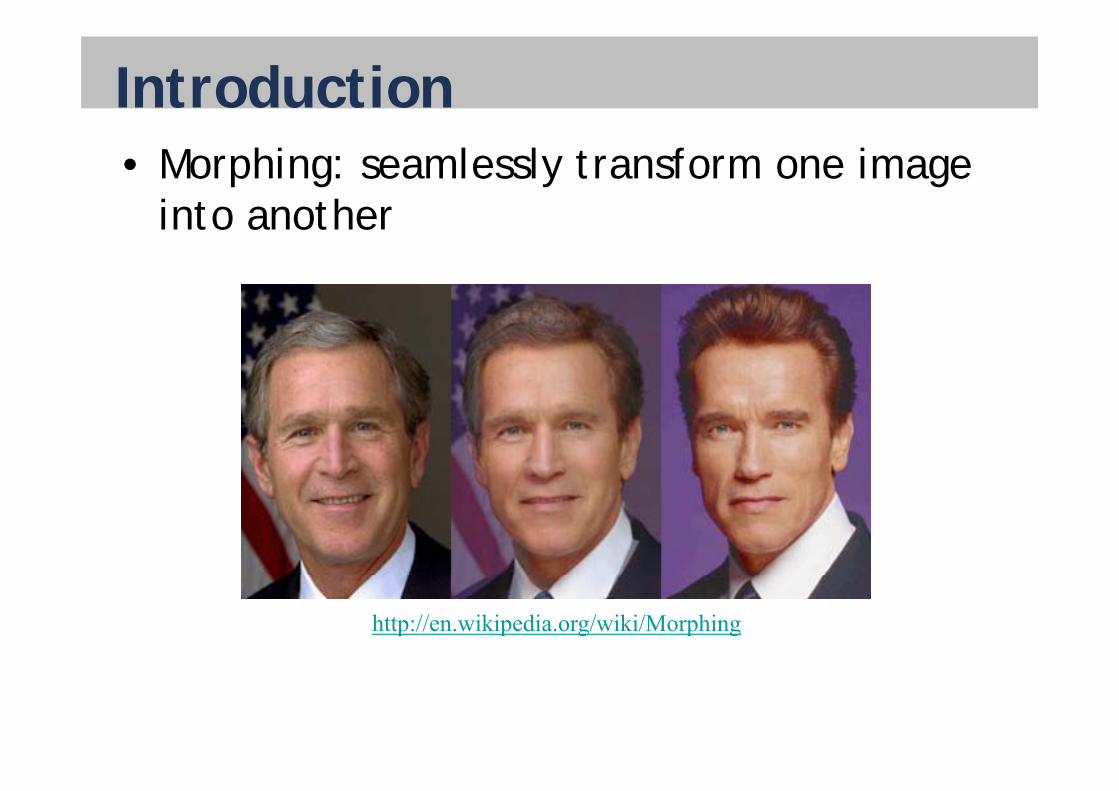
Introduction• Morphing: seamlessly transform one image
into anotherinto another
http://en.wikipedia.org/wiki/Morphing

Introduction• Morphing: seamlessly transform one image
into anotherinto another
http://www-cs.ccny.cuny.edu/~wolberg/pub/cgi96.pdf

Introduction• Image morphing: warping & cross-dissolve
Warping
Warping &di lcross-dissolve
Warping
http://www-cs.ccny.cuny.edu/~wolberg/pub/cgi96.pdf

Warping & morphing• Applications
– Graphic design– 2D animation– Special effects
• Challenges• Challenges
– Design deformation function based on intuitive guser interface
– Avoid resampling artifactsAvoid resampling artifacts

TodayWarping and morphing
• Introduction
Warping• Warping
• MorphingMorphing
• Resampling

Warping• Imagine image is made of rubber
• Stretch, bend, deform rubber
[Image by Frédo Durand][Image by Frédo Durand]

Warping• Image warping is described by a 2D-to-2D
mappingmapping
– Pixel (x,y) is mapped to position (u,v) – New position is given by functions u(x,y) , v(x,y)
(x,y) (u(x,y),v(x,y))

Warping• Image warping is described by a 2D-to-2D
mappingmapping
– Pixel (x,y) is mapped to position (u,v) – New position is given by functions u(x,y) , v(x,y)
• Desired mathematical properties• Desired mathematical properties
– Continuity (no gaps, cracks)y ( g p )– One-to-one (no foldovers)– Smoothness– Smoothness– Flexible enough to represent any warp desired
by userby user

Warping• Affine mapping ⎡⎣ u
v
⎤⎦ =⎡⎣ a b cd e f
⎤⎦⎡⎣ xy
⎤⎦– Translation, rotation,
scaling, shearing
⎣1
⎦ ⎣0 0 1
⎦⎣1
⎦
– Preserves parallel lines
Affine mapping

Warping• Projective mapping (homography)⎡ 0 ⎤ ⎡
b⎤⎡ ⎤ 0/ 0⎡⎣ u0
v0
w0
⎤⎦ =⎡⎣ a b cd e fg h i
⎤⎦⎡⎣ xy1
⎤⎦ u = u0/w0
v = v0/w0
– Preserves straight lines, but not parallel lines
/
Projective mapping

Warping• Projective and affine mappings not flexible
enoughenough
– Cannot express complicated deformations
• Idea: piecewise mapping
– Partition input image into separate pieces– Warp each piece individuallyp p y
• Simplest version: piecewise linear mapping
– Partition input image into triangles– Warp each triangle separatelyp g p y

Piecewise linear warping• User selects corresponding
feature points in sourcepand destination
• Construct triangle mesh• Construct triangle mesh– Same mesh topology on
b th iboth images– Topology: neighborhood
relationships i e relationships, i.e., connectivity
• Warp each triangle • Warp each triangle separately
Source Destination• Demo
http://www.mukimuki.fr/flashblog/labs/morphing/MorphApp.html

Constructing the triangle mesh• Triangulation of set of points in the plane
A titi f th h ll f th i t – A partition of the convex hull of the points into trianglesV ti f th t i gl th i t i t– Vertices of the triangles are the input points
– Triangles do not contain any other points• There are an exponential number of
triangulations of a point set
Different triangulations of a point set
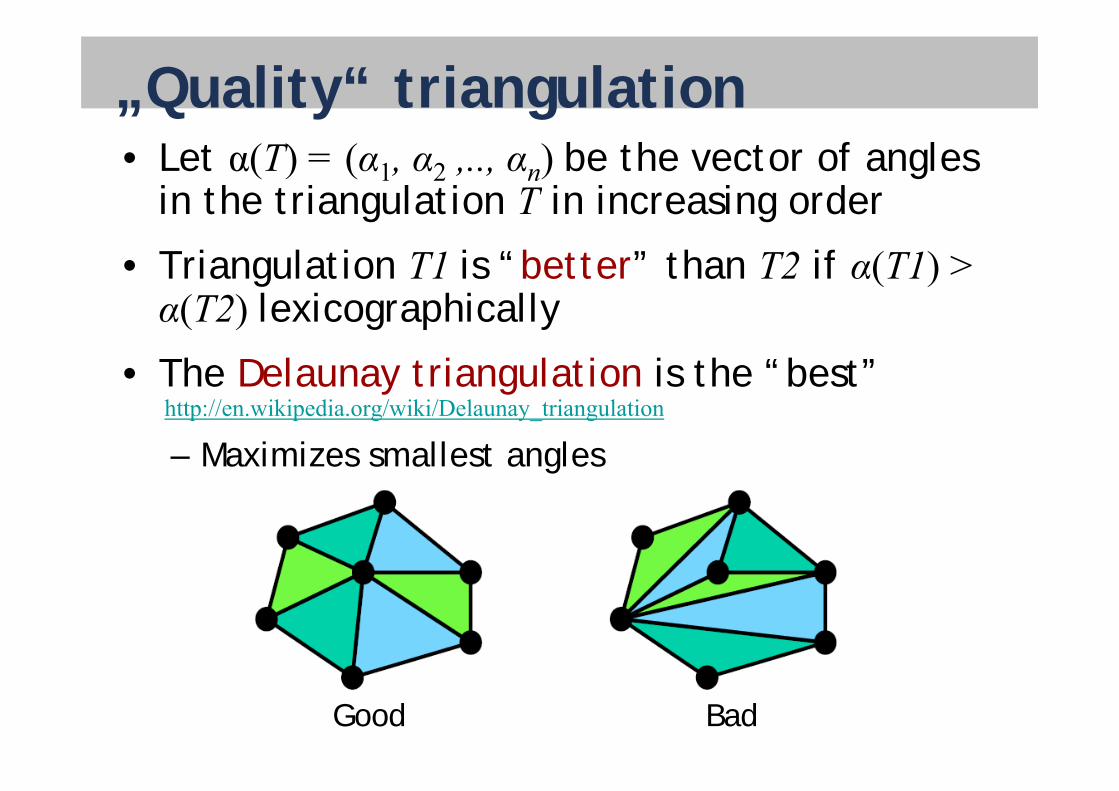
„Quality“ triangulation• Let α(T) = (α1, α2 ,.., αn) be the vector of angles
in the triangulation T in increasing orderg g
• Triangulation T1 is “better” than T2 if α(T1) > α(T2) lexicographicallyα(T2) lexicographically
• The Delaunay triangulation is the “best”http://en.wikipedia.org/wiki/Delaunay_triangulation
– Maximizes smallest angles
Good Bad

Improving a triangulation• In any convex quadrangle, an edge flip is
possiblepossible
• If this flip improves the triangulation p p glocally, it also improves the global triangulationtriangulation
Edge flipEdge flip

Naïve Delaunay algorithm• Start with arbitrary triangulation
• Flip any illegal edge until no more exist
...
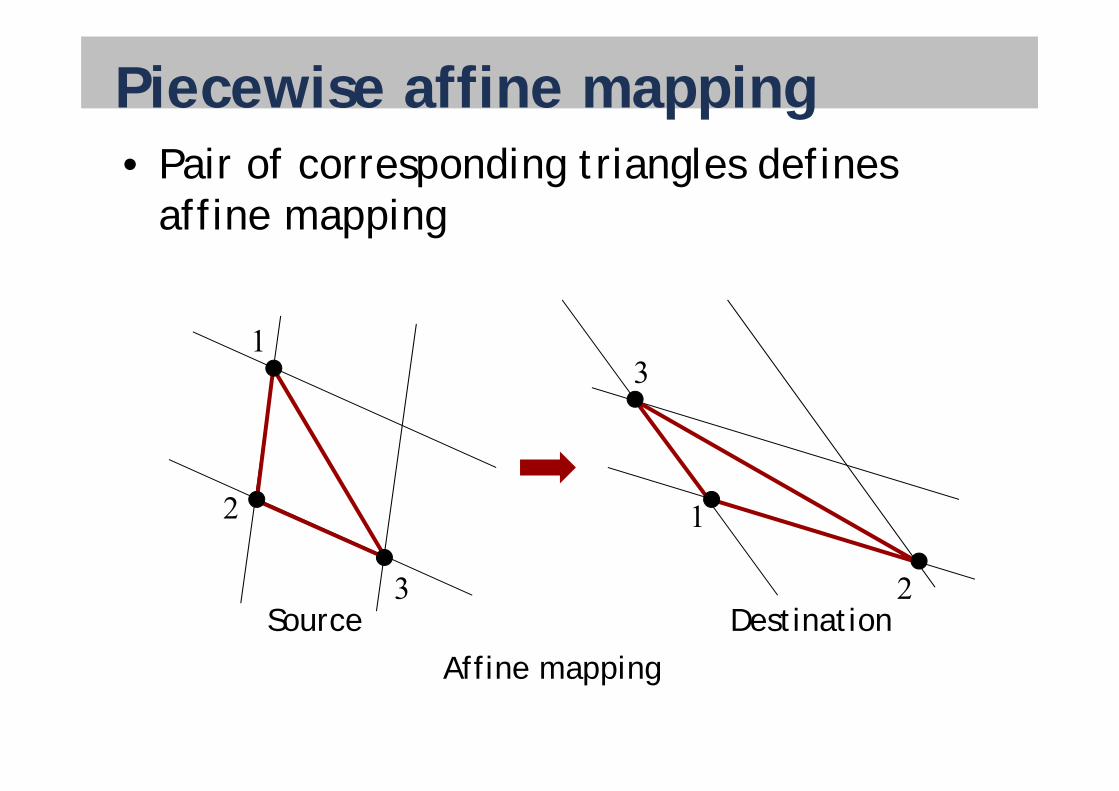
Piecewise affine mapping• Pair of corresponding triangles defines
affine mappingaffine mapping
13
2 1
3 2
Affine mappingSource Destination
Affine mapping
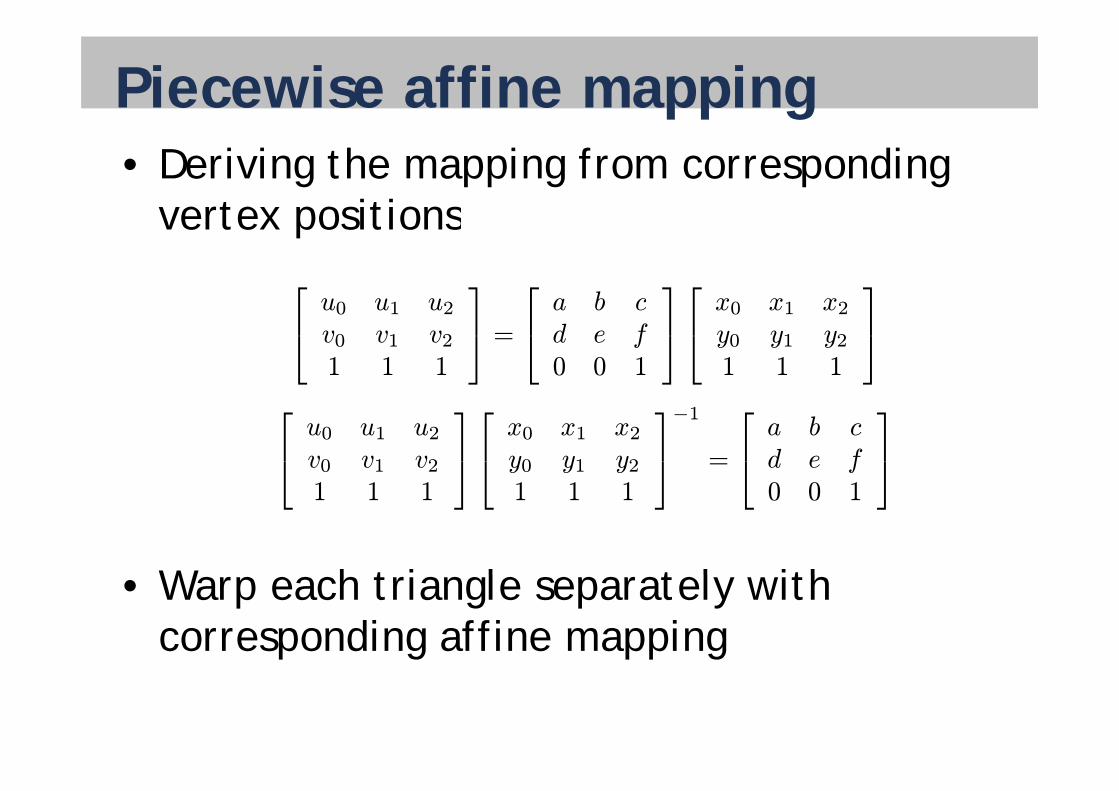
Piecewise affine mapping• Deriving the mapping from corresponding
vertex positionsvertex positions⎡u0 u1 u2
⎤ ⎡a b c
⎤⎡x0 x1 x2
⎤⎡⎣ u0 u1 u2v0 v1 v21 1 1
⎤⎦ =⎡⎣ a b cd e f0 0 1
⎤⎦⎡⎣ x0 x1 x2y0 y1 y21 1 1
⎤⎦⎡⎣ u0 u1 u2v0 v1 v21 1 1
⎤⎦⎡⎣ x0 x1 x2y0 y1 y21 1 1
⎤⎦−1 =⎡⎣ a b cd e f0 0 1
⎤⎦
W h t i l t l ith
⎣1 1 1
⎦⎣1 1 1
⎦ ⎣0 0 1
⎦
• Warp each triangle separately with corresponding affine mapping

ImplementationForward warp• For each pixel in input• For each pixel in input
imageCopy color to warped – Copy color to warped location in output
• Problem: gapsProblem: gapsInverse warp• For each pixel in output
image– Lookup color from
inverse warped location in inputin input
Source Destination

Implementation• Forward transformation
⎡⎣ u0 u1 u2v0 v1 v21 1 1
⎤⎦⎡⎣ x0 x1 x2y0 y1 y21 1 1
⎤⎦−1 =⎡⎣ a b cd e f0 0 1
⎤⎦⎣1 1 1
⎦⎣1 1 1
⎦ ⎣0 0 1
⎦
• Inverse transformation⎡x0 x1 x2
⎤⎡u0 u1 u2
⎤−1 ⎡a b cd f
⎤−1⎡⎣ y0 y1 y21 1 1
⎤⎦⎡⎣ v0 v1 v21 1 1
⎤⎦ =
⎡⎣ d e f0 0 1
⎤⎦

Implementation• Need to figure out which inverse
transformation needs to be applied to ppdestination pixel– Each triangle has different transformation– Each triangle has different transformation
• Determine in which triangle destination pixel lieslies– Need consistently oriented
t i l ( t l k i )
12
triangle (say counterclockwise)– Define edge normals
Ch k if i t i i id– Check if point is on insideof each edge using dot product
Normal
3productDestination triangle
3

Discussion• Piecewise linear warping is only C0 continuous
Fi t d i ti i t ti– First derivative is not continuous
• Not guaranteed to be one-to-one• Not guaranteed to be one to one
– Foldovers

Discussion• Many more sophisticated warping methods exist
Cage based (no mesh required)Cage-based (no mesh required)http://www.cs.technion.ac.il/~weber/Publications/Complex-Coordinates/index.html
Splines (Photoshop)Splines (Photoshop)Moving least squares interpolation
http://faculty.cs.tamu.edu/schaefer/research/mls.pdf

TodayWarping and morphing
• Introduction
Warping• Warping
• MorphingMorphing
• Resampling

Morphing• Goal: smooth transition between source
and destination imageand destination image
• Separate shape and colorp p
Source Destination

Morphing• Warp each image separately, then cross-dissolve
Warp to inbetween shape Warp to inbetween shapep p Warp to inbetween shape

Morphing• Warp each image separately, then cross-dissolve
Cross-dissolve
Warp Warpp Warp

Shape interpolation• Instead of applying warp in one step, interpolate
to inbetween position
• Simplest solution: per triangle linear interpolation
(x, y) (u, v)
⎡ ⎤ ⎡ ⎤Source (t=0) Destination (t=1)
⎡⎣ xy
⎤⎦ (1− t) +⎡⎣ uv
⎤⎦ t

Note• Affine source-to-target mapping⎡
u⎤ ⎡
a b c⎤⎡
x⎤
Interpolated⎡ ⎤ ⎡ ⎤
⎡⎣ v1
⎤⎦ =⎡⎣ d e f0 0 1
⎤⎦⎡⎣ y1
⎤⎦• Interpolated
point
⎡⎣ xy
⎤⎦ (1− t) +⎡⎣ uv
⎤⎦ t
• Substitute inaffine mapping
⎡⎢⎢⎢⎣xy
1
⎤⎥⎥⎥⎦ (1− t) +⎡⎢⎢⎢⎣a b cd e f
0 0 1
⎤⎥⎥⎥⎦⎡⎢⎢⎢⎣xy
1
⎤⎥⎥⎥⎦ t =affine mapping ⎣1⎦ ⎣
0 0 1⎦ ⎣1⎦
⎛⎜⎡⎢ 1 0 00 1 0
⎤⎥(1 t) +
⎡⎢ a b cd f
⎤⎥t
⎞⎟ ⎡⎢ x ⎤⎥⎜⎜⎜⎝⎢⎢⎢⎣ 0 1 0
0 0 1
⎥⎥⎥⎦ (1− t) + ⎢⎢⎢⎣ d e f
0 0 1
⎥⎥⎥⎦ t⎟⎟⎟⎠ ⎢⎢⎢⎣ y1
⎥⎥⎥⎦• Can switch order of affine mapping and
interpolation!

Implementation• Given pair of source and
destination triangles derive
⎡⎣ a b cd e f
⎤⎦destination triangles, derive affine mapping
⎣0 0 1
⎦
• Compute interpolatedmapping
⎡⎢⎢⎢⎣1 0 00 1 00 0 1
⎤⎥⎥⎥⎦ (1− t) +⎡⎢⎢⎢⎣a b cd e f
0 0 1
⎤⎥⎥⎥⎦ tmapping
• Obtain inverse
⎣0 0 1
⎦ ⎣0 0 1
⎦⎛⎡1 0 0
⎤ ⎡a b c
⎤ ⎞−1⎛⎜⎜⎜⎝⎡⎢⎢⎢⎣ 0 1 0
0 0 1
⎤⎥⎥⎥⎦ (1− t) +⎡⎢⎢⎢⎣ d e f
0 0 1
⎤⎥⎥⎥⎦ t⎞⎟⎟⎟⎠
• Inversely map pixel in intermediate image to source imageto source image

Shape interpolation• Linear interpolation often leads to undesired
effects• Various improvements possible
E g As rigid as possible shape interpolation“– E.g., „As-rigid-as-possible shape interpolationhttp://www.cs.tau.ac.il/~dcor/online_papers/papers/arap.pdf
Triangulations
Linear
As-rigid-as-As-rigid-as-possible

Cross-dissolve• Interpolate colors linearly per-pixel
• Treat RGB color channels independently
C = I0(1 t) + I1tC = I0(1− t) + I1t
Interpolated warp, Interpolated warp,Per-pixel colorp p,Image I0
p p,Image I1
pinterpolation C
Algorithm• Compute affine mapping for each pair of
trianglesg
• For each intermediate image at time t– Compute interpolated affine mapping at time t for
each pair of trianglesl i l h i – Interpolate triangle mesh at time t
– For each pixel in intermediate imageD i i hi h i l d i l i li l • Determine in which interpolated triangle it lies, select corresponding interpolated affine mapping
• Warp pixel to source image, look up source colorWarp pixel to source image, look up source color• Warp pixel to destination image, look up destination
colorLi l i l i l l• Linearly interpolate pixel colors

Examples• http://youtube.com/watch?v=nUDIoN-_Hxs
• http://www.youtube.com/watch?gl=DE&hl=de&v=HdmnZyXAxWky
• http://www.youtube.com/watch?v=tyBs6-cmFvQ
TodayWarping and morphing
• Introduction
Warping• Warping
• MorphingMorphing
• Resampling

Resampling• Warped pixel location will not coincide
with source pixelswith source pixels
• Resampling: looking up and interpolating p g g p p gsource pixels
Ch ll id if– Challenge: avoid artifacts
• Great background materialghttp://www-2.cs.cmu.edu/~ph/texfund/texfund.pdf
– Image warping and texture mappingg p g pp g

Color look-up• Given warped pixel
• Closest four source pixels are at
• How to compute color of pixel?How to compute color of pixel?

Nearest-neighbor interpolation• Use color of closest source pixel
• Simple, but low quality

Bilinear interpolation1. Linear interpolation
horizontallyhorizontally

Bilinear interpolation1. Linear interpolation
horizontallyhorizontally
2. Linear interpolation vertically

Problems• In magnified regions,
not smooth enoughnot smooth enough
• In minified regions, g ,aliasing
• Goal
– In magnified regions – In magnified regions, smooth interpolationIn minified regions – In minified regions, take the average

Aliasing
P ti t f i Ph t hPerspective transform in Photoshop

ResamplingSource space Destination space
Resampling [Heckbert]http://www-2.cs.cmu.edu/~ph/texfund/texfund.pdf
Discrete input Discrete outputDiscrete input Discrete output
Reconstruct SampleLow-pass
Warp
Low passfilter
Reconstructed input Warped input Continuous output
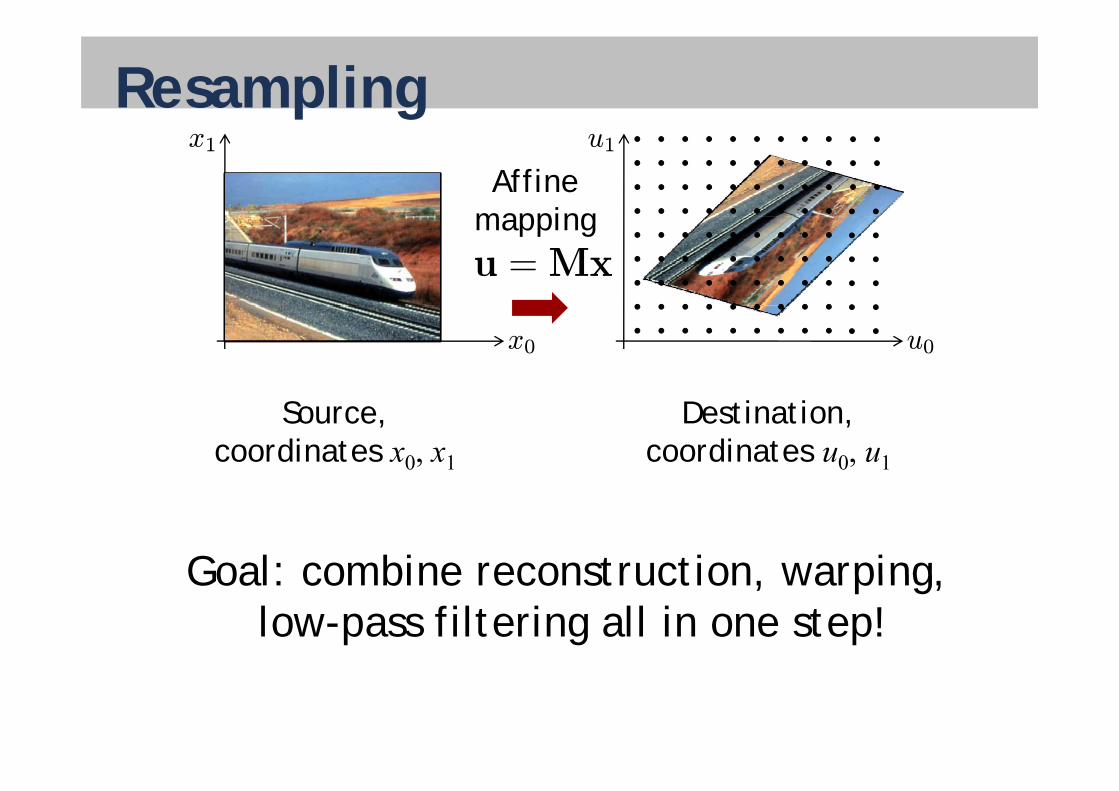
Resamplingx1 u1
Affinemappingmappingu =Mx
x0 u0
Source,coordinates x0, x1
Destination,coordinates u0, u1
Goal: combine reconstruction warping Goal: combine reconstruction, warping, low-pass filtering all in one step!

Resamplingx1
ri(x)
x0
R t tiXfiri(x)
Reconstruction

Resamplingx1 u1
Affinemapping
ri(x)ri(M
−1u)
mappingu =Mx
x0 u0
R t ti
Xf (M 1 )
Xfiri(x) u =Mx
ReconstructionAffine mappingXfiri(M
−1u)

Resamplingx1 u1
Affinemapping
ri(x)ri(M
−1u)
mappingh(u)u =Mx
x0 u0
R t ti
Xf (M 1 )
Xfiri(x) u =Mx
ReconstructionAffine mappingXfiri(M
−1u)
Low-pass filteringXfiri(M
−1u) ? h(u) =Xfiρi
ow pass lte g
Resampling filterρi(u) = ri(M
−1u) ? h(u)Resampling filter

Resamplingx1 u1
Affinemapping
ri(x)ri(M
−1u)
mappingu =Mx h(u)
x0 u0
ρi(u) = ri(M−1u) ? h(u)
Resampling filter
=Zri(M
−1μ)h(u− μ)dμ
ρ0i(x) =Zri(ξ)h(u−Mξ)|M|dξ
Variable substitutionμ =Mξ
ρi( )Z
i(ξ) ( ξ)| | ξ=Zri(ξ)h(M(M
−1u− ξ))|M|dξ( ) h0( ) h0( ) h(M )|M|= ri(x) ? h
0(x) h0(x) = h(Mx)|M|where

Resamplingx1 u1
Affinemapping
ri(x)ri(M
−1u)
mappingu =Mx h(u)
x0 u0
Source space formulation„Convolution of reconstruction
fil d d l
Destination space formulation„Convolution of warped
i fil d lfilter and warped low-pass filter in source space“
reconstruction filter and low-pass filter in destination space“
ρ0i(x) = ri(x) ? h0(x) ρi(u) = ri(M
−1u) ? h(u)
h0(x) = h(Mx)|M|where

Resamplingx1 u1
Affinemapping
ri(x)ri(M
−1u)
mappingu =Mx h(u)
x0 u0
Resampled image at destination pixel uXfiρ
0i(M
−1u)Xfiρi(M u)
Algorithm • For all destination pixels at positions u
• Map back to position in source image• Sum up contributions of all source space resampling
M−1u• Sum up contributions of all source space resampling
filters i
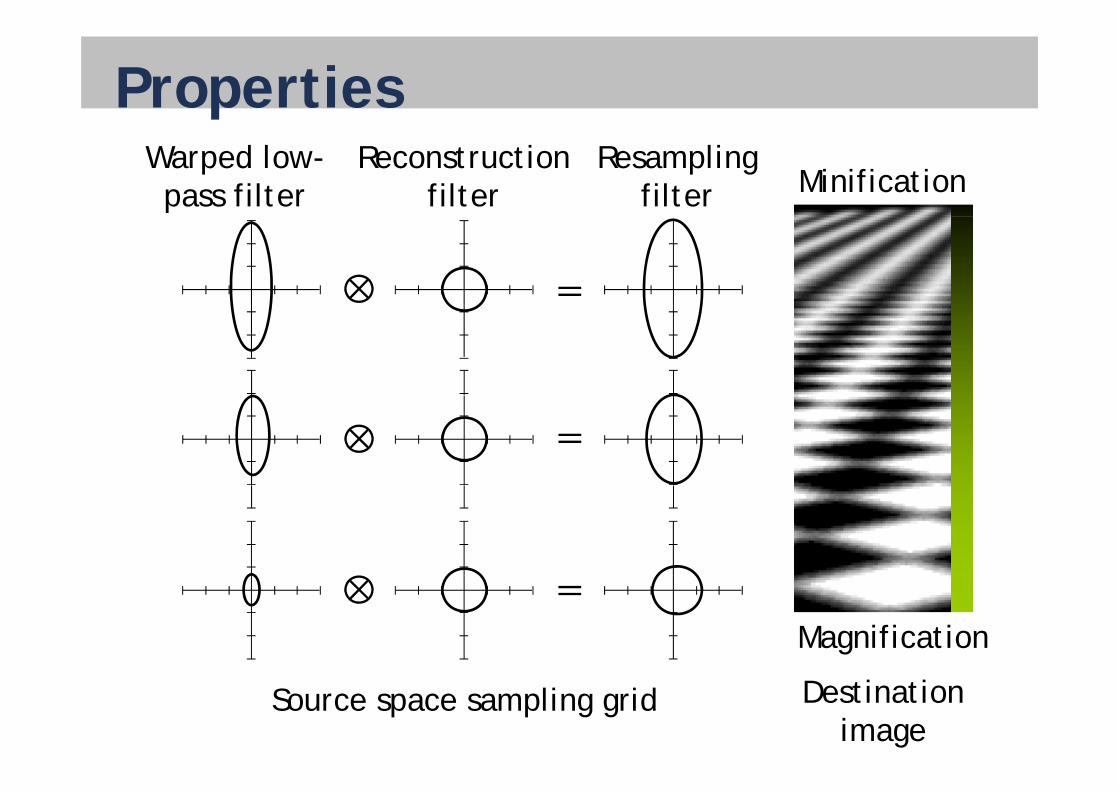
PropertiesWarped low-pass filter
Reconstructionfilter
Resamplingfilter Minification
Magnification
Source space sampling grid Destinationimage

Gaussian resampling filters• General (elliptical) 2D Gaussian
http://en.wikipedia.org/wiki/Gaussian_function#Two-dimensional_Gaussian_function
– Covariance matrix V– Centered at cCentered at c
1
2q|V|e
− 12 (x−c)TV−1(x−c)
• Convenient because
2πq|V|
• Convenient because
– Affine mapping of an (elliptical) Gaussian filter is again an Gaussian filter
– Convolution of two Gaussians is again a Gaussian– Combined resampling filter is Gaussian

Gaussian filters• Source space reconstruction filter
( )1 −1
2 (x−xi)T (x−xi)
• Destination space low-pass filter
ri(x) =2πe 2 (x xi) (x xi)
p p
h(u) =1
2πe−
12u
Tu
• Warped low-pass filter
h0(x) h(Mx)|M| |M|e−
12x
TMTMx
• Source space resampling filter
h (x) = h(Mx)|M| =2πe 2
1
D il ( h f li h l diff i )
ri(x)?h0(x) =
1
2πq|M−1M−1T + I|
e−12 (x−xi)T (M−1M−1T+I)−1(x−xi)
• Details (watch out for slightly different notation)http://www-2.cs.cmu.edu/~ph/texfund/texfund.pdf

Gaussian filters• Map destination pixel back to source
• Compute Gaussian resampling filter
Compute bounding box• Compute bounding box
• Evaluate at each source pixel in bounding Evaluate at each source pixel in bounding box, weight pixel color, sum up
M−1uM u

Bounding box• Isocontour of Gaussian is given by
r2(x) = xTVx = c• Axis aligned bounding box goes through points
on isocontour where partial derivatives vanish
r (x) = x Vx = c
on isocontour where partial derivatives vanish
∂ 2( )∂r2(x)
∂x0= 0x1
r2(x) = c
∂r2(x)
∂= 0
x0
∂x1

Bounding box• Quadratic form
2( ) TV V
⎡A B
⎤r2(x) = xTVx = c V =
⎡⎣B C
⎤⎦2( ) A 2 C 2
• Partial derivativesr2(x0, x1) = Ax
20 + 2Bx0x1 + Cx
21 = c (#)
Partial derivatives∂r2(x)
∂x= 2Ax0 + 2Bx1 = 0⇒ x0 = −B/Ax1
∂x0∂r2(x)
= 2Cx1 + 2Bx0 = 0⇒ x0 = −C/Bx1∂x1
2Cx1 + 2Bx0 0⇒ x0 C/Bx1
• Substitute for x0 in (#) and solve for x0, x1

Notes• If mapping is not affine, use local affine
approximation at each destination pixelapproximation at each destination pixel
• Tweak filter parameters for visually best p yresults
• Can use radial filter profiles other than exponential (Gaussian filter)p ( )

Notes• Anisotropic texture filtering in computer
graphics often implemented as approximation graphics often implemented as approximation to procedure described herehttp://en.wikipedia.org/wiki/Anisotropic_filtering
Trilinear mipmapping Anisotropic filtering

Next time• Panoramas


















