MATRIX DECOMPOSITION MFS ALGORITHMS FOR ...MFS algorithms for elasticity and thermo–elasticity...
23
MATRIX DECOMPOSITION MFS ALGORITHMS FOR ELASTICITY AND THERMO–ELASTICITY PROBLEMS IN AXISYMMETRIC DOMAINS * ANDREAS KARAGEORGHIS †‡§ AND YIORGOS–SOKRATIS SMYRLIS †‡§ Abstract. In this work, we propose an efficient matrix decomposition algorithm for the Method of Fundamental So- lutions when applied to three–dimensional boundary value problems governed by elliptic systems of partial differential equations. In particular, we consider problems arising in linear elasticity in axisymmetric domains. The proposed al- gorithm exploits the block circulant structure of the coefficient matrices and makes use of fast Fourier transforms. The algorithm is also applied to problems in thermo–elasticity. Several numerical experiments are carried out. Key words. Method of fundamental solutions, elliptic systems, Cauchy–Navier equations, thermo–elastostatics, circu- lant matrices, fast Fourier transform, fast algorithms. AMS subject classifications. Primary 35E05, 35J55, 65N35; Secondary 35J40, 41A30, 65N38. 1. Introduction. The Method of Fundamental Solutions (MFS) is a Trefftz–type technique in which the solution is approximated by a linear combination of fundamental solutions of the un- derlying partial differential operator with singularities (sources) placed outside the domain of the problem under consideration. This method is applicable when the fundamental solution of the underlying differential operator is known. The singularities of the fundamental solutions can be either free or preassigned. In the former, the solution of the discrete problems requires the solution of a nonlinear least squares problem whereas in the latter, it requires the solution of a linear system. In the current study, we use the MFS with the singularities fixed on a prescribed surface known as the pseudo–boundary. The coefficients in the linear combinations of fundamental solutions are determined by collocating the boundary conditions. In recent years, the MFS has become popular mainly because of its simplicity and ease of imple- mentation. It has been successfully applied to a large variety of physical problems. A review of such applications as well as the advantages of the MFS over other methods can be found in Fair- weather and Karageorghis [10], Golberg and Chen [14, 15], Kolodziej [21, 22]. The MFS has been widely used for the solution of problems in linear elasticity. The first application of the MFS for elasticity problems can be found in the 1964 paper by Kupradze and Aleksidze [25], whereas a theoretical analysis and density results for problems of linear elasticity may be found in [23, 41]. The solution of anisotropic elasticity problems was considered in [2, 29]. In [30], inverse problems in planar elasticity were considered wheareas axisymmetric elastostatics problems are studied in [17, 37]. Recently, the MFS has been applied to the computation of stress intensity factors in linear elastic fracture mechanics [3, 18]. The MFS was applied to thermo-elasticity problems in [1, 26]. Further applications of the MFS to elasticity problems can be found in [8, 12, 32, 33, 34, 35, 36]. In this work, our goal is to propose efficient MFS discretizations with fixed sources and boundary collocation for the solution of the Cauchy–Navier equations in axisymmetric domains. This is * Technical Report TR–10–2006, Department of Mathematics and Statistics, University of Cyprus, June, 2006. † Department of Mathematics and Statistics/ , University of Cyprus/ , P.O.Box 20537, 1678 Nicosia/ , Cyprus/ . ‡ E-mail: {andreask, smyrlis}@ucy.ac.cy § This work was supported by University of Cyprus grant # 8037-3/312-21005. 1
Transcript of MATRIX DECOMPOSITION MFS ALGORITHMS FOR ...MFS algorithms for elasticity and thermo–elasticity...

MATRIX DECOMPOSITION MFS ALGORITHMS FOR ELASTICITYAND THERMO–ELASTICITY PROBLEMS IN AXISYMMETRIC DOMAINS∗
ANDREAS KARAGEORGHIS†‡§ AND YIORGOS–SOKRATIS SMYRLIS†‡§
Abstract. In this work, we propose an efficient matrix decomposition algorithm for the Method of Fundamental So-lutions when applied to three–dimensional boundary value problems governed by elliptic systems of partial differentialequations. In particular, we consider problems arising in linear elasticity in axisymmetric domains. The proposed al-gorithm exploits the block circulant structure of the coefficient matrices and makes use of fast Fourier transforms. Thealgorithm is also applied to problems in thermo–elasticity. Several numerical experiments are carried out.
Key words. Method of fundamental solutions, elliptic systems, Cauchy–Navier equations, thermo–elastostatics, circu-lant matrices, fast Fourier transform, fast algorithms.
AMS subject classifications. Primary 35E05, 35J55, 65N35; Secondary 35J40, 41A30, 65N38.
1. Introduction. The Method of Fundamental Solutions (MFS) is a Trefftz–type technique inwhich the solution is approximated by a linear combination of fundamental solutions of the un-derlying partial differential operator with singularities (sources) placed outside the domain of theproblem under consideration. This method is applicable when the fundamental solution of theunderlying differential operator is known. The singularities of the fundamental solutions can beeither free or preassigned. In the former, the solution of the discrete problems requires the solutionof a nonlinear least squares problem whereas in the latter, it requires the solution of a linear system.
In the current study, we use the MFS with the singularities fixed on a prescribed surface knownas the pseudo–boundary. The coefficients in the linear combinations of fundamental solutions aredetermined by collocating the boundary conditions.
In recent years, the MFS has become popular mainly because of its simplicity and ease of imple-mentation. It has been successfully applied to a large variety of physical problems. A review ofsuch applications as well as the advantages of the MFS over other methods can be found in Fair-weather and Karageorghis [10], Golberg and Chen [14, 15], Kołodziej [21, 22].
The MFS has been widely used for the solution of problems in linear elasticity. The first applicationof the MFS for elasticity problems can be found in the 1964 paper by Kupradze and Aleksidze [25],whereas a theoretical analysis and density results for problems of linear elasticity may be found in[23, 41]. The solution of anisotropic elasticity problems was considered in [2, 29]. In [30], inverseproblems in planar elasticity were considered wheareas axisymmetric elastostatics problems arestudied in [17, 37]. Recently, the MFS has been applied to the computation of stress intensity factorsin linear elastic fracture mechanics [3, 18]. The MFS was applied to thermo-elasticity problems in[1, 26]. Further applications of the MFS to elasticity problems can be found in [8, 12, 32, 33, 34, 35,36].
In this work, our goal is to propose efficient MFS discretizations with fixed sources and boundarycollocation for the solution of the Cauchy–Navier equations in axisymmetric domains. This is
∗Technical Report TR–10–2006, Department of Mathematics and Statistics, University of Cyprus, June, 2006.†Department of Mathematics and Statistics/Tm ma Majhmatik¸n kai Statistik c, University of Cyprus/Panepist -
mio KÔprou, P.O.Box 20537, 1678 Nicosia/LeukwsÐa, Cyprus/KÔproc.‡E-mail: andreask, [email protected]§This work was supported by University of Cyprus grant # 8037-3/312-21005.
1

2 A. Karageorghis and Y.-S. Smyrlis
achieved by developing efficient matrix decomposition algorithms (MDA); MDAs are fast directmethods which reduce the solution of a problem to the solution of a set of independent problemsof lower order. Such algorithms have been developed for the solution of linear systems resultingfrom finite difference, finite element, spectral and orthogonal spline collocation methods. Surveysof MDAs can be found in [4, 5]. Efficient MDAs for the approximations of functions and theirderivatives using radial basis functions are proposed in [16]. MDAs similar to the ones proposedin this study were used in the context of the boundary element method for harmonic problems in[31, 38] and for linear elasticity problems in [39, 40].
The MDAs developed in this work are nontrivial extensions of the corresponding algorithms de-veloped for harmonic and biharmonic problems in axisymmetric domains [11, 19, 44, 46] and makeuse of the block circulant nature of the coefficient matrices arising in the MFS discretization. Theefficiency of the algorithms is improved further with the use of Fast Fourier Transforms (FFTs).
The paper is organized as follows. In Section 2, we give a description of the MFS for general ellipticsystems. In Section 3 we formulate the MFS for three-dimensional elasticity problems and developan efficient MDA for such problems in axisymmetric domains. In Section 4, we test our algorithmon several examples. An extension of the proposed MDA is applied to thermo–elasticity problemsin Section 5. Finally, in Section 6 we provide some concluding remarks.
2. The MFS for elliptic systems.
2.1. Fundamental solutions of linear systems. Let Lu = 0 be a d× d linear homogeneoussystem of partial differential equations, where,
Lu =
L11 · · · L1d
......
Ld1 · · · Ldd
u1...
ud
=
∑dj=1 L1juj
...∑d
j=1 Ldjuj
, (2.1)
where u = (u1, . . . , ud)∈Rd, L = (Lij)di,j=1 and Lij = ∑|α|≤m aij
α Dα are scalar partial differentialoperators in Rn with constant coefficients. Alternatively, L = ∑|α|≤m AαDα, with constant coeffi-
cient matrices Aα = (aijα )d
i,j=1. A fundamental solution of L is a matrix E = (eij)di,j=1, where eij are
real–valued functions, smooth in Rnr0, satisfying
LE = δ I ,
in the sense of distributions, where δ is the Dirac measure with unit mass at the origin and I is theidentity matrix in Rd×d. Equivalently,
∫
RnE(x−y)L?ψ(y) dy = ψ(x),
for every x∈Rn and ψ = (ψ1, . . . , ψd) with ψi∈C∞0 (Rn), where L? is the adjoint operator of L. If
f1, . . . , fd are measurable functions and
ui(x) =d
∑j=1
∫
Rneij(x−y) f j(y) dy, i = 1, . . . , d, (2.2)
then Lu = f , where f = ( f1, . . . , fd) and u = (u1, . . . , ud), provided that the integrals on theright–hand side of (2.2) are meaningful. Formulæ (2.2) can be written in vector form as
u(x) =∫
RnE(x−y) f (y) dy, (2.2′)

MFS algorithms for elasticity and thermo–elasticity problems 3
or in the simpler form u = E∗ f .
2.2. The MFS formulation. In the MFS for second order1 elliptic systems, the components ofthe approximate solution uN = (uN
1 , . . . , uNd ) is a linear combination of the form
uNi (x) =
d
∑k=1
N
∑j=1
ckj eik(x−yj), i = 1, . . . , d, (2.3)
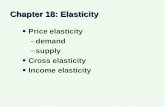
with the singularities yjNj=1 lying on a given pseudo–boundary ∂Ω′ of a domain Ω′ which em-
braces Ω(See Figure 1
).
DEFINITION. Let Ω, Ω′ be open connected subsets of Rn. We say that Ω′ embraces Ω if Ω ⊂ Ω′, andfor every connected component V of RnrΩ, there is an open connected component V′ of RnrΩ′ such thatV′ ⊂ V.
FIGURE 1. The grey region is the domain Ω; the broken lines correspond to the embracing pseudo–boundary ∂Ω′.
Alternatively, (2.3) can be written as uN(x) = ∑Nj=1 E(x−yj) cj, where cj = (c1
j , . . . , cdj ), or equiva-
lently
uN(x) =d
∑k=1
N
∑j=1
ckj ek(x−yj), (2.3′)
where ek, k = 1, . . . , d, are the columns of the matrix E.
3. Three–dimensional elasticity problems. We consider the boundary value problem in R3
governed by the Cauchy–Navier equations of elasticity
(λ + µ) uk,ki + µ ui,kk = 0 in Ω, (3.1a)
ui = fi on ∂Ω. (3.1b)
1In the case of a higher order elliptic partial differential operator L, the linear combinations of fundamental solutionsof L are not dense in the space of all solutions of the same operator. For example, in the case of the biharmonic operatorone needs to also include the fundamental solution of the Laplace operator. See [6, 41].

4 A. Karageorghis and Y.-S. Smyrlis
Here we are using the indicial tensor notation in terms of the displacements u1, u2 and u3. System(3.1a) often appears in the literature as2
∆∗ u = µ ∆u + (λ + µ) grad div u = 0.
The operator ∆∗ is known as the Lame operator. The constants λ and µ, which are positive, areknown as the Lame constants.
3.1. MFS formulation. The matrix G(x) =(
gij(x))3
i,j=1 with
gij(x) = − 3µ + λ
8πµ (2µ + λ)· δij
|x| −µ + λ
8πµ (2µ + λ)· xixj
|x|3 (3.2)
where δij is the Kronecker delta and |x|2 = x21 + x2
2 + x23, is a fundamental solution3 of ∆∗, i.e.,
∆∗ G = δ I . Here I is the unit matrix in R3×3. Alternatively, expression (3.2) can be written as
G(x) = − 18πµ (2µ + λ)
(3µ + λ
|x| I +µ + λ
|x|3 x · xT)
, (3.2′)
where x · xT = (xixj)3i,j=1∈R3.
In the MFS [1, 23, 24, 33, 41] the displacements u =(u1, u2, u3
)at the point P ∈R3 are approxi-
mated by
uM,N(c, Q ; P) =M
∑m=1
N
∑n=1
G(P−Qm,n) cm,n, (3.3)
or equivalently
uM,Ni (c, Q ; P) =
M
∑m=1
N
∑n=1
3
∑j=1
cjm,n gij(P−Qm,n), i = 1, 2, 3,
where cm,n = (c1m,n, c2
m,n, c3m,n)∈R3, Q = (Qm,n)n=1,...,N
m=1,...,M with Qm,n =(
xQm,n, yQ
m,n, zQm,n
)∈R3 beingthe coordinates of the singularities (sources) which lie outside Ω. In equation (3.3), we use a doublesummation to indicate that the surface of a three–dimensional region is two–dimensional and theposition of each source may be described by two parameters.
Let Ω be an open and bounded domain in R3 with sufficiently smooth boundary. Linear combina-tions of the form (3.3), with the singularities lying on a prescribed pseudo–boundary ∂Ω′ of Ω, aredense, with respect to the uniform norm of C(Ω), in the set of solutions of Cauchy–Navier systemin Ω which extend continuously to Ω. For a proof and extensions see [41].
3.2. Axisymmetric surface discretization. In our work, the domain Ω ⊂ R3 is axisymmetric,formed by the rotation of a region Ω′ ⊂ R2 about the z−axis.
2Note that the Cauchy–Navier equations can also be written as
∆u +1
1−2νgrad div u = 0,
where ν is Poisson’s ratio. The Lame constants can be expressed as λ =νE
(1 + ν)(1−2ν)and µ =
E2(1 + ν)
, where E is the
modulus of elasticity.3Expression (3.2) is due to Lord Kelvin (see [28]). For further details and the derivation of (3.2) see [27].

MFS algorithms for elasticity and thermo–elasticity problems 5
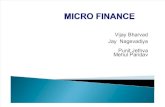
FIGURE 2. Typical distribution of sources on an axisymmetric pseudo–boundary of an axisymmetric domain.
The singularities Qm,n are fixed on the boundary ∂Ω of a solid Ω surrounding Ω. The solid Ω isgenerated by the rotation of the planar domain Ω′ which is similar to Ω′. A set of MN collocationpoints Pk,`M,N
k=1,`=1 is chosen on ∂Ω in the following way: We first choose N points on the bound-ary ∂Ω′ of Ω′. These can be described by their polar coordinates
(rP` , zP
`
), ` = 1, . . . , N, where rP
`
denotes the vertical distance of the point P` from the z−axis and zP` denotes the z−coordinate of
the point P`. The points on ∂Ω are taken to be
Pk,` =(rP` cos ψk, rP
` sin ψk, zP`
),
where
ψk =2(k−1)π
M, k = 1, . . . , M. (3.4)
Similarly, we choose a set of MN singularities Qm,nM,Nm=1,n=1 on ∂Ω by taking
Qm,n =(rQ
n cos ϕm, rQn sin ϕm, zQ
n),
where
ϕm =2(m−1 + α)π
M, m = 1, . . . , M, (3.5)
where the N points Qm are chosen on the boundary ∂Ω′ of Ω′. The parameter α∈ [0, 1/2) indicates
a rotation of the sources by an angle2πα
Mwith respect to the boundary points in the azimuthal
direction. Such a rotation has been used with other MFS approximations and can improve theaccuracy of the method [11, 44, 45]. A typical distribution of singularities on an axisymmetricpseudo–boundary surrounding an axisymmetric solid is shown in Figure 2.
3.3. Generation of linear system. In the MFS, the coefficients c =(c1
m,n, c2m,n, c3
m,n)n=1,...,N
m=1,...,M
are determined so that the boundary condition is satisfied at the boundary points Pk,`M,Nk=1,`=1:
uM,N1 (c, Q ; Pk,`) = f1(Pk,`), (3.6a)
uM,N2 (c, Q ; Pk,`) = f2(Pk,`), (3.6b)
uM,N3 (c, Q ; Pk,`) = f3(Pk,`), (3.6c)

6 A. Karageorghis and Y.-S. Smyrlis
k = 1, . . . , M, ` = 1, . . . , N. This yields a 3MN × 3MN linear system of the form
Ad =
A1,1 A1,2 · · · A1,N
A2,1 A2,2 · · · A2,N...
.... . .
...AN,1 AN,2 · · · AN,N
d1
d2
...
dN
=
f 1
f 2
...
f N
= f . (3.7)
Here
A`,ν =
A1,1`,ν A1,2
`,ν · · · A1M,`,ν
A2,1`,ν A2,2
`,ν · · · A2,M`,ν
......
. . ....
AM,1`,ν AM,2
`,ν · · · AM,M`,ν
, (3.8)
where Akµ`,ν = g(Pk,` −Qµ,ν)∈R3×3,
dν =(d1,ν, . . . , dM,ν) =
(c1
1,ν, c21,ν, c3
1,ν, c12,ν, c2
2,ν, c32,ν, . . . , c1
M,ν, c2M,ν, c3
M,ν) ∈ R3M,
f ` =(
f 1,`, . . . , f M,`) =(
f 11,`, f 2
1,`, f 31,`, f 1
2,`, f 22,`, f 3
2,`, . . . , f 1M,`, f 2
M,`, f 3M,`
) ∈ R3M,
and f ik,` = fi(Pk,`), i = 1, 2, 3, k, µ = 1, . . . , M and `, ν = 1, . . . , N.
3.4. Circulant structure of the system matrix. Clearly, the system matrix A has no circulantstructure. In fact, even the matrices A`,ν in (3.8) are not block circulant. However, by a suitabletransformation, system (3.7) can be written in an equivalent form where the coefficient matrix hasa block circulant structure.
Let
Rϑ =
cos ϑ sin ϑ 0sin ϑ −cos ϑ 0
0 0 1
.
We pre–multiply system (3.7) by the matrix
R = IN ⊗ R
and
R =
Rϑ1 0 0 · · · 0 00 Rϑ2 0 · · · 0 0...
.... . .
......
...0 0 0 · · · RϑM−1 00 0 0 · · · 0 RϑM
,
where ϑk =2π(k− 1)
M.
Clearly,
R2ϑ = I3, R2 = I3M and R2 = I3MN .

MFS algorithms for elasticity and thermo–elasticity problems 7
System (3.7) becomes
RAd = RARRd = R f ,
or
A d = f , (3.9)
where
A = RAR, d = Rd and f = R f .
3.5. Matrix decomposition algorithm. The matrix A can be written as
A = RAR =
A1,1 A1,2 · · · A1,N
A2,1 A2,2 · · · A2,N
......
. . ....
AN,1 AN,2 · · · AN,N
where
A`,ν = RA`,νR =
A1,1`,ν A1,2
`,ν · · · A1,M`,ν
A2,1`,ν A2,2
`,ν · · · A2,M`,ν
......
. . ....
AM,1`,ν AM,2
`,ν · · · AM,M`,ν
and
Ak,µ`,ν = Rϑk Ak,µ
`,ν Rϑµ. (3.10)
Using the fact that (for a proof see Lemma 6.1 in the Appendix)
Rϑk Ak,µ`,ν Rϑµ
= Rϑk+j Ak+j,µ+j`,ν Rϑµ+j , (3.11)
for every j, such that j, k + j, µ + j ∈ 1, . . . , M, it follows that the matrix A has a block circulant
structure, i.e., if k− µ = k′ − µ′ mod M, then Ak,µ`,ν = Ak′ ,µ′
`,ν . In particular,
A`,ν = circ(
A1,1`,ν, A1,2
`,ν, . . . A1,M`,ν
).
Equivalently, we have
A`,ν =M
∑m=1
Pm−1 ⊗ A1,m`,ν ,

8 A. Karageorghis and Y.-S. Smyrlis
where the matrix P is the matrix P = circ(0, 1, 0, · · · , 0)∈RM×M. Here we take P0 = IM. Thus,
A =
M
∑m=1
Pm−1 ⊗ A1,m1,1
M
∑m=1
Pm−1 ⊗ A1,m1,2 · · ·
M
∑m=1
Pm−1 ⊗ A1,m1,N
M
∑m=1
Pm−1 ⊗ A1,m2,1
M
∑m=1
Pm−1 ⊗ A1,m2,2 · · ·
M
∑m=1
Pm−1 ⊗ A1,m2,N
......
. . ....
M
∑m=1
Pm−1 ⊗ A1,mN,1
M
∑m=1
Pm−1 ⊗ A1,mN,2 · · ·
M
∑m=1
Pm−1 ⊗ A1,mN,N
=M
∑m=1
Pm−1 ⊗ A1,m1,1 Pm−1 ⊗ A1,m
1,2 · · · Pm−1 ⊗ A1,m1,N
Pm−1 ⊗ A1,m2,1 Pm−1 ⊗ A1,m
2,2 · · · Pm−1 ⊗ A1,m2,N
......
. . ....
Pm−1 ⊗ A1,mN,1 Pm−1 ⊗ A1,m
N,2 · · · Pm−1 ⊗ A1,mN,N
From [9], the matrices Pm can be diagonalized as
Pm = U∗EmU, (3.12)
where E = diag(1, ω, . . . , ωM−1),
U∗ =1
M1/2
1 1 1 · · · 11 ω ω2 · · · ωM−1
1 ω2 ω4 · · · ω2(M−1)
......
......
1 ωM−1 ω2(M−1) · · · ω(M−1)(M−1)
,
and ω = e2πi/M. Pre–multiplying (3.9) by IN ⊗U ⊗ I3 yields
A d = f , (3.13)
where
A =(IN ⊗U ⊗ I3
)A
(IN ⊗U∗ ⊗ I3),
d =(IN ⊗U ⊗ I3
)d = (di)3MN
i=1 , f =(IN ⊗U ⊗ I3
)f = ( fi)
3MNi=1 .
The matrix A can be written as
A =M
∑m=1
Em−1 ⊗ A1,m1,1 Em−1 ⊗ A1,m
1,2 · · · Em−1 ⊗ A1,m1,N
Em−1 ⊗ A1,m2,1 Em−1 ⊗ A1,m
2,2 · · · Em−1 ⊗ A1,m2,N
......
. . ....
Em−1 ⊗ A1,mN,1 Em−1 ⊗ A1,m
N,2 · · · Em−1 ⊗ A1,mN,N
.

MFS algorithms for elasticity and thermo–elasticity problems 9
Since the matrix E is diagonal, then clearly each block Em−1 ⊗ A1,mi,j is of block diagonal form, i.e.,
Em−1 ⊗ A1,mi,j = diag
(A1,m
i,j , ωm−1 A1,mi,j , . . . , ω(m−1)(M−1) A1,m
i,j),
and so are the N2 blocks of size 3M× 3M of the matrix A:
M
∑m=1
Em−1 ⊗ A1,mi,j = diag
( M
∑m=1
A1,mi,j ,
M
∑m=1
ωm−1 A1,mi,j , . . . ,
M
∑m=1
ω(M−1)(m−1) A1,mi,j
)
= diag(
A1i,j, A2
i,j, . . . , AMi,j
),
where
A`i,j =
M
∑m=1
ω(`−1)(m−1) A1,mi,j , ` = 1, . . . , M, (3.14)
i, j = 1, . . . , N. The coefficient matrix A in system (3.13) consists of N × N blocks of size 3M× 3M.Each of these blocks is block diagonal consisting of M blocks of size 3× 3. Therefore, system (3.13)can be decomposed into the M independent 3N × 3N systems:
A`1,1 A`
1,2 · · · A`1,N
A`2,1 A`
2,2 · · · A`2,N
......
...
A`N,1 A`
N,2 · · · A`N,N
d1,`
d2,`...
dN,`
=
f 1,`
f 2,`...
f N,`
, ` = 1, . . . , M, (3.15)
where
dj,` =(d3M(j−1)+3`−2, d3M(j−1)+3`−1, d3M(j−1)+3`
),
f j,` =(
f3M(j−1)+3`−2, f 3M(j−1)+3`−1, f3M(j−1)+3`
),
with j = 1, . . . , N and ` = 1, . . . , M.
Once d has been computed, the vector d can be calculated from
d =(IN ⊗U∗ ⊗ I3
)d. (3.16)
Finally, from
d = R d (3.17)
we recover d, the solution of system (3.7).
Note that, because of the block circulant structure of the matrix A, we do not need to construct allthe entries of either matrix A or matrix A. We only need to construct the submatrices A1,m
`,ν , m =1, . . . , M, `, ν = 1, . . . , N. For the construction of these we first need to construct the submatricesA1,m
`,ν , m = 1, . . . , M, `, ν = 1, . . . , N.
System (3.7) can thus be solved efficiently with the following

10 A. Karageorghis and Y.-S. Smyrlis
Algorithm.
Step 1: Compute f = R f .
Step 2: Compute the submatrices A1,m`,ν , m = 1, . . . , M, `, ν = 1, . . . , N from (3.10).
Step 3: Compute f =(IN ⊗U ⊗ I3
)f and hence fn,`, n = 1, · · · , N, ` = 1, · · · , M.
Step 4: Construct the matrices A`i,j, ` = 1, . . . , M, i, j = 1, . . . , N from formula (3.14).
Step 5: Solve the M systems of order 3N in (3.15).
Step 6: Compute d from (3.16).
Step 7: Compute d from (3.17).
Cost.• In Steps 3 and 6, because of the form of the matrices U and U∗, the operations can be carried out
via FFTs and inverse FFTs at a cost of O(NM log M).
• In Step 4, for each i, j = 1, . . . , N, ` = 1, . . . , M, we need to perform an M−dimensional in-verse FFT, in order to compute the nine entries of each A`
i,j. This can be done at a cost ofO(N2 M log M).
• In Step 5, we need to solve M complex linear systems of order 3N. This is done using anLU−factorization with partial pivoting at a cost of O(MN3) operations.
• The FFT operations are performed using the NAG4 routines C06FPF, C06FQF and C06FRF.
4. Numerical results.
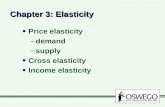
4.1. Axisymmetric solids considered. In our numerical experiments we considered the fol-lowing axisymmetric solids.
SOLID (i). Typical distribu-tion of sources and boundarypoints for Sphere.
SOLID (ii). Typical distribution ofsources and boundary points forCylinder.
SOLID (iii). Typical distribution of sourcesand boundary points for Torus.
FIGURE 3. Axisymmetric solids considered.
4.1.1. Spherical domains. Consider the case where Ω ⊂ R3 is the sphere of radius $:
Ω =(x, y, z) ∈ R3 : x2 + y2 + z2 < $2. (4.1)
4Numerical Algorithms Group Library Mark 20, NAG Ltd, Wilkinson House, Jordan Hill Road, Oxford, UK, 2001.

MFS algorithms for elasticity and thermo–elasticity problems 11
The singularities Qm,nM,Nm=1,n=1 are fixed on the boundary ∂Ω of the sphere
Ω =(x, y, z) ∈ R3 : x2 + y2 + z2 < R2,
where R > $, and Qm,n = (xQm,n , yQm,n , zQm,n) with
Qm,n = R(
sin χn cos ϕm, sin χn sin ϕm, cos χn),
where ϕm is given in (3.5) and
χn =nπ
N + 1, n = 1, . . . , N.
The MN collocation points Pk,`M,Nk=1,`=1 on ∂Ω are given by
Pk,` = $(
sin χ` cos ψk, sin χ` sin ψk, cos χ`
),
where ψk is given by (3.4).
Note that we avoid the points corresponding to χ` = 0 and χ` = π as they remain invariantunder rotation in the azimuthal direction and would lead to singular matrices.
(See Figure 3(i).
)
4.1.2. Cylindrical domains. For the cylindrical domain
Ω =(x, y, z) ∈ R3 : x2 + y2 < $2, −h < z < h
, (4.2)
the MN singularities Qm,nM,Nm=1,n=1 are given by
Qm,n =(rQn cos ϕm, rQn sin ϕm, zQn
),
with ϕm as in (3.5) and(rQ
n , zQn
), rQ
n > 0, n = 1, · · · , N, the polar coordinates of N points onthe boundary of the rectangle [0, R] × [−H, H] with R > $ and H > h. The collocation pointsPk,`M,N
k=1,`=1 are taken to be
Pk,` =(rP` cos ψk, rP
` sin ψk, zP`
),
with(rP` , zP
`
), rP
` > 0, ` = 1, . . . , N, the polar coordinates of N points on the boundary of therectangle [0, $]× [−h, h].
(See Figure 3(ii).
)
4.1.3. Toroidal domains. Consider the torus of radii $1, $2 with $2 > $1:
Ω =(x, y, z) ∈ R3 :
(√x2 + y2 − $2
)2+ z2 < $2
1
, (4.3)
whose boundary ∂Ω is given by the parametric equations
x = $2 cos χ2 + $1 cos χ2 cos χ1, y = $2 sin χ2 + $1 sin χ2 cos χ1, z = $1 sin χ1,
with
0 ≤ χ1, χ2 ≤ 2π.
In this case, Ω is a torus embracing Ω, and which has boundary ∂Ω defined by the parametricequations
x = $2 cos χ2 + R1 cos χ2 cos χ1, y = $2 sin χ2 + R1 sin χ2 cos χ1, z = R1 sin χ1,

12 A. Karageorghis and Y.-S. Smyrlis
where
$1 < R1 < $2, 0 ≤ χ1, χ2 ≤ 2π.
The singularities Qm,nM,Nm=1,n=1 on ∂Ω have coordinates
Qm,n =($2 cos χ2
n + R1 cos χ2n cos χ1
m, $2 sin χ2n + R1 sin χ2
n cos χ1m, R1 sin χ1
m),
where χ2n is as in (3.5), and
χ1m =
2(m−1)π
M, m = 1, . . . , M. (4.4)
The MN collocation points Pk,`M,Nk=1,`=1 on ∂Ω have coordinates
Pk,` =($2 cos χ2
` + $1 cos χ2` cos χ1
k , $2 sin χ2` + $1 sin χ2
` cos χ1k , $1 sin χ1
k).
where χ2n is as in (3.4).
(See Figure 3(iii).
)
4.2. Numerical experiments. We considered boundary value problems of the form (3.1) withthe function f = ( f1, f2, f3) corresponding to the exact solutions
Example 1. u1 = 0.3 e.3x+.4y cos(.5z), u2 = 0.4 e.3x+.4y cos(.5z), u3 = −0.5 e.3x+.4y sin(.5z).
Example 2. u1 =3−4ν
r+
(x−10)2
r3 , u2 =(x−10)y
r3 , u3 =(x−10)z
r3 , with r2 = (x−10)2+y2+z2.
In all the numerical examples reported in this study, we calculated the maximum error on theboundary of Ω for each of the components of the solution:
Ei = maxx∈∂Ω
|uM,Ni (x)− ui(x)|, i = 1, 2, 3,
and
E = max
E1, E2, E3
.
We only study the error on the boundary because the error eM,N = uM,N − u satisfies the Cauchy–Navier system which obeys the following maximum principle:
If Ω is bounded domain in R3 with smooth boundary, there exists a constant H depending on Ω, such that,for every solution u = (u1, u2, u3)∈C2(Ω ; R3) ∩ C(Ω ; R3) of (3.1a) the following inequality holds:
maxx∈Ω
i=1,2,3
∣∣ui(x)∣∣ ≤ H max
x∈∂Ωi=1,2,3
∣∣ui(x)∣∣. (4.5)
This result is due to Fichera [13]. (See also [7, Chapter 4].)
4.2.1. Sphere. In the case of the sphere, the error was calculated on a grid of boundary pointsdefined by
xi,j = $ sin ϑj cos ϕi, yi,j = $ sin ϑj sin ϕi, zi,j = $ cos ϑj,
where ϕi =2(i− 1)π
L, i = 1, . . . , L and ϑj =
j π
L + 1, j = 1, . . . , L and L is taken to be appropri-
ately large.

MFS algorithms for elasticity and thermo–elasticity problems 13
10−2
100
102
10−15
10−10
10−5
100
N = 16
Max
imum
Err
or
10−2
100
102
10−15
10−10
10−5
100
N = 24
10−2
100
102
10−15
10−10
10−5
100
N = 32
Max
imum
Err
or
ε10
−210
010
210
−15
10−10
10−5
100
N = 48
ε
FIGURE 4. LogLog–plot of maximum error E versus distance ε in Example 1 in the case of the sphere for different values of N.
10−2
100
102
10−15
10−10
10−5
100
N = 16
Max
imum
Err
or
10−2
100
102
10−15
10−10
10−5
100
N = 24
10−2
100
102
10−15
10−10
10−5
100
N = 32
Max
imum
Err
or
ε10
−210
010
210
−15
10−10
10−5
100
N = 48
ε
FIGURE 5. LogLog–plot of maximum error E versus distance ε in Example 2 in the case of the sphere for different values of N.
In particular, we considered the sphere with $ = 1. In Figure 4, we present the logarithm of themaximum error E versus the logarithm of the distance ε = R − $ in the case α = 0 and forN(= M) = 16, 24, 32, 48 in Example 1. This figure reveals that the MFS approximation is poorwhen ε = R − $ is either very small or very large. Similar observations were reported in the

14 A. Karageorghis and Y.-S. Smyrlis
0 0.25 0.510
−12
10−10
10−8
10−6
10−4
10−2
ε = 0.5
Max
imum
Err
or
α0 0.25 0.5
10−6
10−5
10−4
10−3
10−2
10−1
ε = 0.2
α0 0.25 0.5
10−4
10−3
10−2
10−1
ε = 0.1
α0 0.25 0.5
10−4
10−3
10−2
10−1
ε = 0.05
α
N = 12N = 16N = 24N = 32N = 48N = 64
FIGURE 6. Log–plot of maximum error E1 versus the angular parameter α in Example 1 in the case of the sphere for differentvalues of N and ε.
case of Laplace’s equation [42, 44]. The behaviour of E is very similar in the case when α 6= 0.In Figure 5, we present the corresponding results for Example 2. The behaviour of these resultsis very similar to the behaviour of the results for Example 1. The poor results for large ε are dueto ill-conditioning as has been reported several times in the literature (see, for example, [20, 44]),whereas the poor results for small ε are due to the near-singularity of the fundamental solutions(see for example [43]).
In Figure 6, we present the logarithm of the maximum error E1 versus the angular parameterα. Because of the symmetry of the problem about α = 1/2, we only considered the values 0 ≤α ≤ 1/2. We present the four cases ε = R − $ = .05, .1, .2, .5 for N(= M) = 12, 16, 24, 32, 48and 64 in Example 1. In all cases, we observe that as N increases, the error E1 has a tendencyto have a minimum for α ≈ 1
4 . Also, the larger the distance ε, the less dependent E1 is on α.Similar observations were reported in the case of axisymmetric harmonic and biharmonic problems[11, 44]. The corresponding results for Example 2 are presented in Figure 7 and are very similar tothe results for Example 1. The results for E2 and E3 are very similar to those for E1.
4.2.2. Cylinder. We considered the cylinder with h = 1, $ = 1. We only present results forExample 1 as the results for Example 2 are very similar. In Figure 8, we present the logarithm of Eversus the logarithm of the distance ε in the case α = 0 and for N(= M) = 16, 24, 32 and 48. Thisfigure reveals that, as in the case of the sphere, the MFS approximation is poor when ε = H − h iseither very small or very large. The behaviour of E is very similar when α 6= 0.
In Figure 9, we present the logarithm of the error E1 versus the angular parameter α. As before,because of the symmetry of the problem about α = 1/2, we only considered the values 0 ≤ α ≤1/2. We present the five cases ε = H − h = .9, .7, .5, .4 and .3 for various values of N(= M). As inthe case of the sphere, as ε increases, the error E1 decreases. Unlike the case of the sphere, there is

MFS algorithms for elasticity and thermo–elasticity problems 15
0 0.25 0.510
−12
10−10
10−8
10−6
10−4
10−2
ε = 0.5
Max
imum
Err
or
α0 0.25 0.5
10−7
10−5
10−3
10−1
ε = 0.2
α0 0.25 0.5
10−5
10−4
10−3
10−2
10−1
ε = 0.1
α0 0.25 0.5
10−4
10−3
10−2
10−1
ε = 0.05
α
N = 12N = 16N = 24N = 32N = 48N = 64
FIGURE 7. Log–plot of maximum error E1 versus the angular parameter α in Example 2 in the case of the sphere for differentvalues of N and ε.
little evidence of a minimum for α ≈ 14 .
4.2.3. Torus. We considered the torus with $1 = 12 , $2 = 1. Here, we only present results for
Example 2. In Figure 10, we present the logarithm of the maximum error E1 versus the angularparameter. We present the two cases ε = R1 − $1 = .4 and .1 for various values of N(= M). Notethat in this case, we are restricted in the choice of ε. In particular, ε has to lie in (0, 1
2 ). As in thecase of the sphere, there is a clear indication that E1 is optimized for α ≈ 1
4 . For ε = .4, E1 is lessdependent on α. As was the case with the other two solids, as ε increases, the error E decreases.
5. Equations of the static theory of thermo–elasticity.
5.1. The three–dimensional model. The displacements u = (u1, u2, u3) and the temperatureϑ of a thermo–elastic medium are described by the system (see [1, 26])
∆∗u = γ grad ϑ, (5.1a)
∆ ϑ = 0, (5.1b)
in Ω, where γ is a positive constant, subject to the Dirichlet boundary conditions
u = f , (5.2a)
ϑ = g, (5.2b)
on the boundary ∂Ω. Equations (5.1) constitute a 4×4 elliptic system with unknowns u and ϑ.It is readily seen that the corresponding Dirichlet problem for bounded domains, in which thedisplacements and the temperature are prescribed on the boundary, enjoys uniqueness.

16 A. Karageorghis and Y.-S. Smyrlis
10−2
100
102
10−15
10−10
10−5
100
N = 16
Max
imum
Err
or
10−2
100
102
10−15
10−10
10−5
100
N = 24
10−2
100
102
10−15
10−10
10−5
100
N = 32
Max
imum
Err
or
ε10
−210
010
210
−15
10−10
10−5
100
N = 48
ε
FIGURE 8. LogLog–plot of maximum error E versus distance ε in Example 1 in the case of the cylinder for different values of N.
A fundamental solution E = (eij)4i,j=1 of (5.1) is given by (see [1, 26])
eij(x) = − (1−δi4)(1−δj4)8πµ(λ+2µ)
((λ+µ)
xixj
|x|3 +(λ+3µ)δij
|x|)−γ δj4(1−δi4)
8π(λ+2µ)xi|x| −
δi4δj4
4π|x| , (5.3)
i, j = 1, 2, 3, 4. The matrix E can be alternatively written in block form as
E(x) =
G(x) ηx|x|
0 −e1(x)
(5.4)
where G(x) is the fundamental solution of the operator ∆∗ given by (3.2), η = − γ
8π(λ + 2µ)and
e1(x) =1
4π|x| ,
is a fundamental solution of −∆.
5.2. MFS formulation. The temperature ϑ is a harmonic function and it can be thus approxi-mated by linear combinations of the form
ϑK(x) =K
∑k=1
ak e1(x−yk),
where ykKk=1 lie on a prescribed pseudo–boundary ∂Ω′ and akK
k=1 are real constants. Equations(5.1a) now become
∆∗u = γ gradK
∑k=1
ak e1(x−yk) = − γ
4π
K
∑k=1
akx−yk|x−yk|3
, (5.5)

MFS algorithms for elasticity and thermo–elasticity problems 17
0 0.25 0.510
−8
10−7
10−6
10−5
10−4
10−3
10−2
10−1
ε = 0.9
Max
imum
Err
or
α0 0.25 0.5
10−7
10−5
10−3
10−1
ε = 0.7
α0 0.25 0.5
10−5
10−4
10−3
10−2
10−1
ε = 0.5
α0 0.25 0.5
10−5
10−4
10−3
10−2
10−1
ε = 0.4
α0 0.25 0.5
10−5
10−4
10−3
10−2
10−1
ε = 0.3
α
N = 12N = 16N = 24N = 32
FIGURE 9. Log–plot of maximum error E1 versus the angular parameter α in Example 1 in the case of the cylinder for differentvalues of N and ε.
which are inhomogeneous. It can be easily verified that
∆∗(
x|x|
)= −2(λ + 2µ)
x|x|3 ,
which allows us to obtain a particular solution up of (5.5):
up(x) =γ
8π(λ+2µ)
K
∑k=1
akx−yk|x−yk|
. (5.6)
Clearly, ∆∗(u− up) = 0, and thus the difference v = u−up can be approximated by linear combi-nations of the form
vJ(x) =J
∑j=1
E(x−zj) bj, (5.7)
where E(x) is given by (3.2), the points zjJj=1 lie on ∂Ω′ and bjJ
j=1 are constant vectors in R3.(See Smyrlis [41, Theorem 8].)
Altogether, we have the following approximate solution:
ϑL(x) = ϑK(x) =K
∑k=1
ak e1(x−yk), (5.8a)
uL(x) =J
∑j=1
E(x−zj) bj +γ
8π(λ+2µ)
K
∑k=1
akx−yk|x−yk|
. (5.8b)
If we set x`L`=1 = ykK
k=1 ∪ zjJj=1, the vector
(uL
1, uL2, uL
3, ϑL)
is a linear combination of thecolumns of the matrices E(x−x`), ` = 1, . . . , L.

18 A. Karageorghis and Y.-S. Smyrlis
0 0.25 0.510
−8
10−7
10−6
10−5
10−4
10−3
10−2
10−1
ε = 0.4
α
Max
imum
Err
or
0 0.25 0.510
−4
10−3
10−2
10−1
ε = 0.1
α
N = 12N = 16N = 24N = 32N = 48N = 64
FIGURE 10. Log–plot of maximum error E1 versus the angular parameter α in Example 2 in the case of the torus for differentvalues of N and ε.
Algorithm. We next present the steps of the MFS algorithm for the solution of the thermo–elastostatic Dirichlet problem (5.1)–(5.2) for axisymmetric solids.
Step 1: Compute the coefficients a`L`=1 in (5.8a).
Step 2: Evaluate h = f − up at the points Pk,`, where up is given by (5.6).
Step 3: Compute vJ in (5.7).
Step 4: Evaluate uL from (5.8b).
Comments.• In Step 1, we solve a Dirichlet problem for Laplace’s equation in an axisymmetric domain. This
is done efficiently by using the MFS matrix decomposition algorithm described in [44].
• In Step 3, we solve a Dirichlet problem for the Cauchy–Navier equations of elasticity, givenby (3.1) replacing f in the boundary conditions by f − up, in an axisymmetric domain. Thisproblem can be solved efficiently using the algorithm described in Section 3.5.
5.3. Numerical example. We considered the boundary value problem of the form (5.1)–(5.2)with the functions f and g corresponding to the exact solutions
Example 3. ϑ(x) =1
|x−x0| , u(x) =1
2(λ + 2µ)· x−x0
|x−x0| .
In our experiments we chose x0 = (8, 8, 8).
In our numerical experiments, we calculated the maximum error in Ω for each of the components

MFS algorithms for elasticity and thermo–elasticity problems 19
of the solution:
E0 = maxx∈Ω
|ϑL(x)− ϑ(x)|,
Ei = maxx∈Ω
|uLi (x)− ui(x)|, i = 1, 2, 3,
and
E = max
E0, E1, E2, E3
.
In order to calculate the above quantities, ϑ, ϑL, u and uL were calculated on a radially uniformL×L×L grid in Ω, where L was taken to be appropriately large.
We considered the sphere with $ = 1. In Figure 11, we present the logarithm of the maximum errorE versus the logarithm of the distance ε = R− $ in the case α = 0 and for N(= M) = 16, 24, 32, 48in Example 3. The results are consistent with the observations reported for the pure elasticityproblem (Examples 1 and 2).
Finally, in Figure 12, we present the logarithm of the maximum relative E1 versus the angularparameter. We present the two cases ε = .2 and .05 for various values of N(= M). As in the pureelasticity problems, we observe that there is a clear indication that E1 is optimized for α ≈ 1
4 andthat for ε = .2, E1 is less dependent on α.
10−2
100
102
10−15
10−10
10−5
100
N = 16
Max
imum
Err
or
10−2
100
102
10−15
10−10
10−5
100
N = 24
10−2
100
102
10−15
10−10
10−5
100
N = 32
Max
imum
Err
or
ε10
−210
010
210
−15
10−10
10−5
100
N = 48
ε
FIGURE 11. LogLog–plot of maximum error E versus distance ε in Example 3 in the case of the sphere for different values of N.
6. Concluding remarks. In this work an efficient MDA–MFS algorithm was developed forthe solution of the Cauchy–Navier system in axisymmetric domains. The linear system resultingfrom the MFS discretization does not possess a block circulant structure like its counterparts for theharmonic and biharmonic equations, due to the fact that its fundamental solutions are not radial.

20 A. Karageorghis and Y.-S. Smyrlis
0 0.25 0.510
−6
10−5
10−4
10−3
10−2
10−1
ε = 0.2
α
Max
imum
Err
or
0 0.25 0.510
−6
10−5
10−4
10−3
10−2
10−1
ε = 0.05
α
N=12N = 16N = 24N = 32N = 48
FIGURE 12. Log–plot of maximum error E1 versus the angular parameter α in Example 3 in the case of the sphere for differentvalues of N and ε.
However, by a suitable transformation which rotates certain blocks in the coefficient matrix, oneobtains a block circulant matrix. The resulting system is solved efficiently using an MDA and FFTs.
The algorithm developed in this study was extended to the more complicated problem of thermo–elasticity in axisymmetric domains.
Note. It is noteworthy that the MDA–MFS for the Cauchy–Navier system is also readily ap-plicable to Stokes equations for incompressible flow:
µ ∆u = grad p,div u = 0,
where u is the velocity vector, p is the pressure and µ is the dynamic viscosity coefficient. Thefundamental solution of Stokes system (Stokeslets) is given by the matrix G(x) =
(gij(x)
)3i,j=1 with
gij(x) = − 18πµ
· δij
|x| −1
8πµ· xixj
|x|3 .
The MFS was applied to such problems in [47, 48].
Acknowledgements. The authors wish to thank Christos Arvanitis for his assistance in tech-nical matters in the preparation of this paper.
Appendix.
Circulant structure of the system matrix. Equation (3.11) is a direct consequence of the fol-lowing lemma:

MFS algorithms for elasticity and thermo–elasticity problems 21
LEMMA 6.1. Let x∈R3 and
Wϕ =
cos ϕ sin ϕ 0− sin ϕ cos ϕ 0
0 0 1
.
Then
Rϑ x · xT Rψ = Rϑ+ϕ
(W−ϕx
) · (W−ϕx)T Rψ+ϕ, (A.1)
for every ϑ, ψ, ϕ∈R.
Proof. We are using the notation
x · xT =
x1
x2
x3
· (x1, x2, x3) =
x21 x1x2 x1x3
x1x2 x22 x2x3
x1x3 x2x3 x23
.
Equation (A.1) is a result of the fact that
RϑWϕ =
cos ϑ sin ϑ 0sin ϑ −cos ϑ 0
0 0 1
cos ϕ sin ϕ 0− sin ϕ cos ϕ 0
0 0 1
=
cos(ϑ + ϕ) sin(ϑ + ϕ) 0sin(ϑ + ϕ) −cos(ϑ + ϕ) 0
0 0 1
= Rϑ+ϕ.
REFERENCES
[1] M. A. ALEKSIDZE, Fundamentalnye funkcii v pribliennyh rexenih graniqnyh zadaq. (Russian)[Fundamental functions in approximate solutions of boundary value problems], Spravoqna MatematiqeskaBiblioteka. [Mathematical Reference Library], “Nauka”, Moscow, 1991. With an English summary.
[2] J. R. BERGER AND A. KARAGEORGHIS, The method of fundamental solutions for layered elastic materials, Eng. Anal. Bound.Elem., 25 (2001), pp. 877–886.
[3] J. R. BERGER, A. KARAGEORGHIS, AND P. A. MARTIN, Stress intensity factor computation using the method of fundamentalsolutions: Mixed-mode problems, Int. J. Numer. Meth. Engng. To appear.
[4] B. BIALECKI AND G. FAIRWEATHER, Matrix decomposition algorithms for separable elliptic boundary value problems in twospace dimensions, J. Comput. Appl. Math., 46 (1993), pp. 369–386.
[5] B. BIALECKI AND G. FAIRWEATHER, Orthogonal spline collocation methods for partial differential equations, J. Comput.Appl. Math., 128 (2001), pp. 55–82. Numerical analysis 2000, Vol. VII, Partial differential equations.
[6] A. BOGOMOLNY, Fundamental solutions method for elliptic boundary value problems, SIAM J. Numer. Anal., 22 (1985),pp. 644–669.
[7] C. A. BREBBIA, S. WALKER, E. ALARCON, A. MARTIN, F. PARIS, F. HARTMANN, J. C. F. TELLES, L. C. WROBEL,J. DOMINGUEZ, M. MARGULIES, AND W. L. WENDLAND, Progress in boundary element methods. Vol. 1, John Wiley& Sons Inc., New York, 1981. Edited and with a preface by Brebbia, A Halsted Press Book.
[8] G. BURGESS AND E. MAHAREJIN, A comparison of the boundary element and superposition methods, Computers & Struc-tures, 19 (1984), pp. 697–705.
[9] P. J. DAVIS, Circulant matrices, John Wiley & Sons, New York-Chichester-Brisbane, 1979. A Wiley-Interscience Publi-cation, Pure and Applied Mathematics.
[10] G. FAIRWEATHER AND A. KARAGEORGHIS, The method of fundamental solutions for elliptic boundary value problems.Numerical treatment of boundary integral equations, Adv. Comput. Math., 9 (1998), pp. 69–95.
[11] G. FAIRWEATHER, A. KARAGEORGHIS, AND Y.-S. SMYRLIS, A matrix decomposition MFS algorithm for axisymmetricbiharmonic problems, Adv. Comput. Math., 23 (2005), pp. 55–71.

22 A. Karageorghis and Y.-S. Smyrlis
[12] R. T. FENNER, A force supersition approach to plane elastic stress and strain analysis, J. Strain Anal., 36 (2001), pp. 517–529.[13] G. FICHERA, Il teorema del massimo modulo per l’equazione dell’elastostatica tridimensionale, Arch. Rational Mech. Anal., 7
(1961), pp. 373–387.[14] M. A. GOLBERG AND C. S. CHEN, Discrete projection methods for integral equations, Computational Mechanics Publica-
tions, Southampton, 1997.[15] , The method of fundamental solutions for potential, Helmholtz and diffusion problems, in Boundary integral methods:
numerical and mathematical aspects, vol. 1 of Comput. Eng., WIT Press/Comput. Mech. Publ., Boston, MA,1999, pp. 103–176.
[16] A. KARAGEORGHIS, C. S. CHEN, AND Y.-S. SMYRLIS, A matrix decomposition rbf algorithm: Approximation of functionsand their derivatives, Appl. Numer. Math. To appear.
[17] A. KARAGEORGHIS AND G. FAIRWEATHER, The method of fundamental solutions for axisymmetric elasticity problems,Comput. Mech., 25 (2000), pp. 524–532.
[18] A. KARAGEORGHIS, A. POULLIKKAS, AND B. J. R., Stress intensity factor computation using the method of fundamentalsolutions, Comp. Mech., 37 (2006), pp. 445–454.
[19] A. KARAGEORGHIS AND Y.-S. SMYRLIS, Matrix decomposition MFS algorithms, in Boundary elements and other meshreduction methods, XXVIII (Skiathos, 2006), vol. 42 of International Series on Advances in Boundary Elements,WIT Press, Southampton, 2006, pp. 61–68.
[20] T. KITAGAWA, On the numerical stability of the method of fundamental solution applied to the Dirichlet problem, Japan J.Appl. Math., 5 (1988), pp. 123–133.
[21] J. A. KOŁODZIEJ, Review of applications of the boundary collocation methods in mechanics of continuous media, Solid Mech.Arch., 12 (1987), pp. 187–231.
[22] , Zastosowanie metody kollokacji brzegowej w zagadnieniach mechaniki. (Polish) [Applications of the Boundary Colloca-tion Method in Applied Mechanics], Wydawnictwo Politechniki Poznanskiej, Poznan, 2001.
[23] V. D. KUPRADZE, On a method of solving approximately the limiting problems of mathematical physics, Z. Vycisl. Mat. i Mat.Fiz., 4 (1964), pp. 1118–1121.
[24] V. D. KUPRADZE AND M. A. ALEKSIDZE, An approximate method of solving certain boundary–value problems, Soobsc.Akad. Nauk Gruzin. SSR, 30 (1963), pp. 529–536. in Russian.
[25] , The method of functional equations for the approximate solution of certain boundary value problems, Comput. MethodsMath. Phys., 4 (1964), pp. 82–126.
[26] V. D. KUPRADZE, T. G. GEGELIA, M. O. BASHELESHVILI, AND T. V. BURCHULADZE, Trehmernye zadaqi matem-atiqeskoi teorii uprugosti i termouprugosti . (Russian) [Three–dimensional problems in the mathematicaltheory of elasticity and thermoelasticity.], Izdat. “Nauka”, Moscow, 1976.
[27] P. K. KYTHE, Fundamental solutions for differential operators and applications, Birkhauser Boston Inc., Boston, MA, 1996.[28] A. E. H. LOVE, A Treatise on the Mathematical Theory of Elasticity, Dover Publications, New York, 1944. Fourth Ed.[29] E. MAHAREJIN, An extension of the superposition method for plane anisotropic elastic bodies, Computers & Structures, 21
(1985), pp. 953–958.[30] L. MARIN AND D. LESNIC, The method of fundamental solutions for the Cauchy problem in two–dimensional linear elasticity,
Int. J. Solids Struct., 41 (2004), pp. 3425–3438.[31] A. MEYER AND S. RJASANOW, An effective direct solution method for certain boundary element equations in 3D, Math.
Methods Appl. Sci., 13 (1990), pp. 43–53.[32] C. PATTERSON AND M. A. SHEIKH, On the use of fundamental solutions in Trefftz method for potential and elasticity
problems, in Boundary Element Methods in Engineering. Proceedings of the Fourth International Seminar onBoundary Element Methods, C. A. Brebbia, ed., Springer–Verlag, New York, 1982, pp. 43–54.
[33] A. POULLIKKAS, A. KARAGEORGHIS, AND G. GEORGIOU, The method of fundamental solutions for three-dimensionalelastostatics problems, Comput. & Structures, 80 (2002), pp. 365–370.
[34] J. RAAMACHANDRAN AND C. RAJAMOHAN, Analysis of composite plates using charge simulation method, Eng. Anal.Bound. Elem., 18 (1996), pp. 131–135.
[35] D. REDEKOP, Fundamental solutions for the collocation method in planar elastostatics, Appl. Math. Modelling, 6 (1982),pp. 390–393.
[36] D. REDEKOP AND R. S. W. CHEUNG, Fundamental solutions for the collocation method in three–dimensional elastostatics,Comput. & Structures, 26 (1987), pp. 703–707.
[37] D. REDEKOP AND J. C. THOMPSON, Use of fundamental solutions in the collocation method in axisymmetric elastostatics,Comput. & Structures, 17 (1983), pp. 485–490.
[38] S. RJASANOW, Effective algorithms with circulant-block matrices, Linear Algebra Appl., 202 (1994), pp. 55–69.[39] S. RJASANOW, Optimal preconditioner for boundary element formulation of the Dirichlet problem in elasticity, Math. Methods
Appl. Sci., 18 (1995), pp. 603–613.[40] S. RJASANOW, The structure of the boundary element matrix for the three-dimensional Dirichlet problem in elasticity, Numer.

MFS algorithms for elasticity and thermo–elasticity problems 23
Linear Algebra Appl., 5 (1998), pp. 203–217.[41] Y.-S. SMYRLIS, Applicability and applications of the method of fundamental solutions, Tech. Report TR–03–2006, Depart-
ment of Mathematics and Statistics, University of Cyprus, February 2006.[42] Y.-S. SMYRLIS AND A. KARAGEORGHIS, Some aspects of the method of fundamental solutions for certain harmonic problems,
J. Sci. Comput., 16 (2001), pp. 341–371.[43] , Some aspects of the method of fundamental solutions for certain biharmonic problems, CMES Comput. Model. Eng.
Sci., 4 (2003), pp. 535–550.[44] , A matrix decomposition MFS algorithm for axisymmetric potential problems, Eng. Anal. Bound. Elem., 28 (2004),
pp. 463–474.[45] , Numerical analysis of the MFS for certain harmonic problems, M2AN Math. Model. Numer. Anal., 38 (2004),
pp. 495–517.[46] T. TSANGARIS, Y.-S. SMYRLIS, AND A. KARAGEORGHIS, A matrix decomposition MFS algorithm for problems in hollow
axisymmetric domains, J. Sc. Comput. To appear.[47] D.-L. YOUNG, C. L. CHIU, C. M. FAN, C. C. TSAI, AND Y. C. LIN, Method of fundamental solutions for multidimensional
stokes equations by the dual–potential formulation, Eur. J. Mech. B Fluids. To appear.[48] D.-L. YOUNG, S. J. JANE, C. M. FAN, K. MURUGESAN, AND C. C. TSAI, The method of fundamental solutions for 2d and
3d stokes problems, J. Comput. Phys., 211 (2006), pp. 1–8. Short Note.