Matrix Algebraaksikas/opt_math.pdfq1qp 111p amam amam = mm mm aa aa L MOM L L MOM L L MOM L p i p AM...
12
Matrix Algebra Why Bother? → most optimization problems are multivariable. → simplifies notation. → improves understanding → provides a useful, standard shorthand. Some References: Anton, H, Elementary Linear Algebra, Wiley, 1977. Edgar, T.F., and D.M. Himmelblau, Optimization of Chemical Processes, McGraw-Hill, 1988 (Appendix B & C). Horn, R.A, and C.R. Johnson, Matrix Analysis, Cambridge University Press, 1985 (Chapter 0). Ortega, J.M., Matrix Theory, Plenum Press, 1987 (Chapter 1). Three Entities: 1) scalars (numbers or single variables). 2) vectors (sets of numbers or variables). 3) matrices (sets of vectors).
Transcript of Matrix Algebraaksikas/opt_math.pdfq1qp 111p amam amam = mm mm aa aa L MOM L L MOM L L MOM L p i p AM...

Matrix Algebra
Why Bother?
→ most optimization problems are multivariable.→ simplifies notation.→ improves understanding→ provides a useful, standard shorthand.
Some References:
Anton, H, Elementary Linear Algebra, Wiley, 1977.Edgar, T.F., and D.M. Himmelblau, Optimization of
Chemical Processes, McGraw-Hill, 1988 (Appendix B &C).
Horn, R.A, and C.R. Johnson, Matrix Analysis, CambridgeUniversity Press, 1985 (Chapter 0).
Ortega, J.M., Matrix Theory, Plenum Press, 1987 (Chapter1).
Three Entities:1) scalars (numbers or single variables).2) vectors (sets of numbers or variables).3) matrices (sets of vectors).

Matrix Algebra
!!!
"
#
$$$
%
&
''
n
1
v
v
vector vor M v
!!!
"
#
$$$
%
&
''((
pnp1
1n11
npnp
mm
mm
matrix Mor
K
MOM
L
M
1) Scalars→ a number (x,2, π).
2) Vectors→ a set of numbers or variables in a row or column.
→ we will use vectors to describe: state of a system, solution to a problem.
3) Matrices→ a set of numbers arranged in an array.
→ we will use matrices to describe relationshipsbetween vectors.

Multiplication:
by a scalar:
by a vector:
Matrix Algebra
!!!
"
#
$$$
%
&
'
!!!
"
#
$$$
%
&
'
pnp1
1n11
n
1
smsm
smsm
s and
sv
sv
s
L
MOM
L
M Mv
[ ]
[ ]
vxvx
vxvx
= vv
x
x
vx =
v
v
xx
nq1q
n111
n1
q
1
T
n
1=i
ii
n
1
n1
T
!!!
"
#
$$$
%
&
!!!
"
#
$$$
%
&
'
!!!
"
#
$$$
%
&
' (
L
MOM
L
LM
ML
xv
vx

Matrix Algebra
Multiplication (cont'd):
by a matrix,
!!!!!
"
#
$$$$$
%
&
!!!
"
#
$$$
%
&
!!!
"
#
$$$
%
&
'
(
(
=
=
n
i
i
n
i
1
pi
1
i1i
n
1
pnp1
1n11
vm
vm
=
v
v
mm
mm
MM
L
MOM
L
Mv
!!!!!
"
#
$$$$$
%
&
!!!
"
#
$$$
%
&
!!!
"
#
$$$
%
&
'
((
((==
p
1=i
inqi
p
1=i
i1qi
1
in1i
1
i11i
pnp1
1n11
qpq1
1p11
mama
mama
=
mm
mm
aa
aa
L
MOM
L
L
MOM
L
L
MOM
L
p
i
p
i
AM
vector
matrix
(note: AM ≠ MA )

Inverse:
For the square, nonsingular matrix Mnxn there is amatrix M-1 such that:
(note: Mnxn is nonsingular if rank[M]=n.)
Matrix inverses are going to be particularly useful forsolving sets of simultaneous, linear equations:
Matrix Algebra
!!!!!!
"
#
$$$$$$
%
&
'
1000
0100
0010
0001
= = = 1-1
L
L
MMOMM
L
L
IMMMM
identity matrix
bMx
bMx
=
1-
=

Transpose:
→ denoted by a superscripted T (or sometimes a ').→ interchange rows and columns.
1) for vectors,
2) for matrices,
if MT=M then M is a symmetric matrix.
Matrix Algebra
[ ]
!!!
"
#
$$$
%
&
'
!!!
"
#
$$$
%
&
'
'
!!!
"
#
$$$
%
&
'
(
pn1n
p111
T
pn1p
1n11
T
np
n1
T
n
1
T
mm
mm
mm
mm
vv
v
v
L
MOM
L
L
MOM
L
LM
M
v

Rank:→ a very important concept in systems theory.
→ number of independent rows or columns in amatrix.
→ by definition:rank [x] = 1rank [v] = 1rank [Mpxn] ≤ min(p,n).
→ can be found by Gaussian Elimination, etc..
→ for example, tells us about the solution to:Mv = b
for Mnxn
Matrix Algebra
set of simultaneous,linear equations.
if rank[M] = n a unique solution.if rank[M] < n many or no solution.{

Some Useful Matrix Facts
1. (AB)T = BT AT
2. (AB)-1 = B-1 A-1 (only if A & B are non-singular)
3. rank[AB] ≤ min(rank[A], rank[B])rank[xTv] = 1rank[vTx] = 1
4. [ ]AA
A!
"
#
$%
&
'( =
!
!
#
$%
&
'(
1 = 1
adj
for a 2 2 matrix:
1
a b
c d ad-bc
d b
c a

First Derivatives:
1) For the scalar function P(x) of the vector variable x:
• convention adopted for this course.• allows direct application of the chain rule.• some texts define as a column vector.
2) For the vector function f(x) of the vector variable x:
Matrix Calculus
!"
#$%
&
'
'
'
'(()
nx
P
x
PPP L
1
wrt ofgradient )( xxx
row vector
!!!!!
"
#
$$$$$
%
&
'
'
'
'
'
'
'
'
!!!
"
#
$$$
%
&
(
(
)(
!!!
"
#
$$$
%
&
)
n
mm
n
x
f
x
f
x
f
x
f
f
f
f
f
L
MOM
L
M
M
1
1
1
1
m
1
m
1
=
)(
)(
)(
)(
)(
)(
x
x
xf
x
x
xf
x
x
x
Jacobian of f wrt x
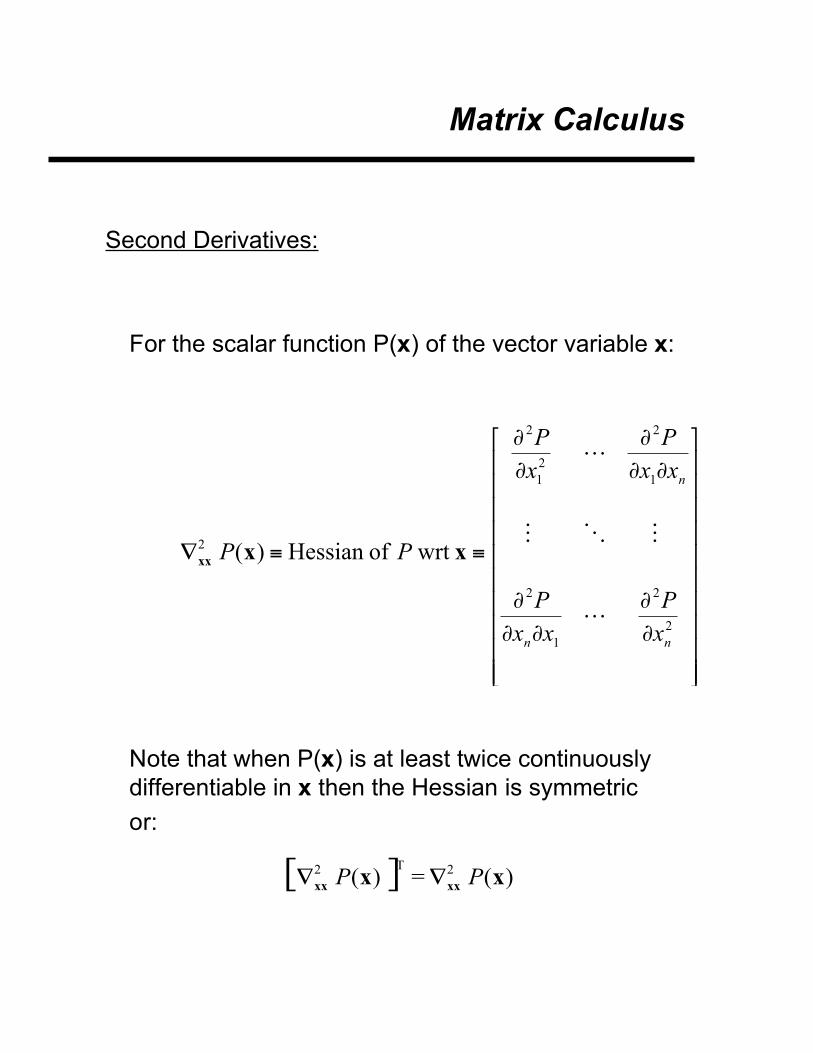
Second Derivatives:
For the scalar function P(x) of the vector variable x:
Note that when P(x) is at least twice continuouslydifferentiable in x then the Hessian is symmetricor:
Matrix Calculus
!!!!!!!!!!
"
#
$$$$$$$$$$
%
&
'
'
''
'
''
'
'
'
(()
2
2
1
2
1
2
2
1
2
2 wrt of Hessian )(
nn
n
x
P
xx
P
xx
P
x
P
PP
L
MOM
L
xxxx
[ ] )( = )( 2T 2xx
xxxxPP !!

Taylor Series Expansion:
If the scalar function P(x) is at least twice continuouslydifferentiable in the vector variable x at some fixed pointxo then:
Note the difference with many texts.
We are going to make extensive use of the Taylor Seriesrepresentation of nonlinear functions.
Matrix Calculus
) - O( + )-( )-(
+ )-( + )( = )(
3
oo
2T
o21
oo
o
o
xxxxxx
xxxx
xxx
xx
P
PPP
!
!

Mathematical Definitions
Linearity:
the function f(z) is linear if f(αx+βy) = αf(x) + βf(y).
This is a very important concept and we will use it inclassify problems.