1 Turing Machines and Equivalent Models Section 13.1 Turing Machines.

Reaction Diffusion EquationsMatrix Pencils and Common Lyapunov Functions
CLFs and Turing InstabilityApplications
Mathematical Biology - Reaction Diffusion Modelsand Turing Instability
Stuart Townley
University of Exeter, UK
March 20, 2014
Stuart Townley Math Biol - Reaction Diffusion 1/ 33

Reaction Diffusion EquationsMatrix Pencils and Common Lyapunov Functions
CLFs and Turing InstabilityApplications
DiffusionReaction Diffusion and Turing Mechanisms
In a collection of spatially distributed particles, be it bacteria,animals, chemicals etc., each particle often moves around in arandom way.The particles tend to spread out as a result of this irregularindividual motion
When this microscopic movement results in some macroscopicmotion of the group we call this a diffusion process.
In order to understand this diffusion via equations let usrestrict attention to one spatial dimension (for simplicity)
Consider a particle moving along the x-axis in a randomfashion - let us suppose that in time 4t the particle moveseither +4x or −4x.Denote by p(x, t) the probability that a particle released atx = 0, t = 0 reaches position x at time t.
Stuart Townley Math Biol - Reaction Diffusion 2/ 33

Reaction Diffusion EquationsMatrix Pencils and Common Lyapunov Functions
CLFs and Turing InstabilityApplications
DiffusionReaction Diffusion and Turing Mechanisms
In a collection of spatially distributed particles, be it bacteria,animals, chemicals etc., each particle often moves around in arandom way.The particles tend to spread out as a result of this irregularindividual motion
When this microscopic movement results in some macroscopicmotion of the group we call this a diffusion process.
In order to understand this diffusion via equations let usrestrict attention to one spatial dimension (for simplicity)
Consider a particle moving along the x-axis in a randomfashion - let us suppose that in time 4t the particle moveseither +4x or −4x.Denote by p(x, t) the probability that a particle released atx = 0, t = 0 reaches position x at time t.
Stuart Townley Math Biol - Reaction Diffusion 2/ 33

Reaction Diffusion EquationsMatrix Pencils and Common Lyapunov Functions
CLFs and Turing InstabilityApplications
DiffusionReaction Diffusion and Turing Mechanisms
In a collection of spatially distributed particles, be it bacteria,animals, chemicals etc., each particle often moves around in arandom way.The particles tend to spread out as a result of this irregularindividual motion
When this microscopic movement results in some macroscopicmotion of the group we call this a diffusion process.
In order to understand this diffusion via equations let usrestrict attention to one spatial dimension (for simplicity)
Consider a particle moving along the x-axis in a randomfashion - let us suppose that in time 4t the particle moveseither +4x or −4x.Denote by p(x, t) the probability that a particle released atx = 0, t = 0 reaches position x at time t.
Stuart Townley Math Biol - Reaction Diffusion 2/ 33

Reaction Diffusion EquationsMatrix Pencils and Common Lyapunov Functions
CLFs and Turing InstabilityApplications
DiffusionReaction Diffusion and Turing Mechanisms
In a collection of spatially distributed particles, be it bacteria,animals, chemicals etc., each particle often moves around in arandom way.The particles tend to spread out as a result of this irregularindividual motion
When this microscopic movement results in some macroscopicmotion of the group we call this a diffusion process.
In order to understand this diffusion via equations let usrestrict attention to one spatial dimension (for simplicity)
Consider a particle moving along the x-axis in a randomfashion - let us suppose that in time 4t the particle moveseither +4x or −4x.Denote by p(x, t) the probability that a particle released atx = 0, t = 0 reaches position x at time t.
Stuart Townley Math Biol - Reaction Diffusion 2/ 33

Reaction Diffusion EquationsMatrix Pencils and Common Lyapunov Functions
CLFs and Turing InstabilityApplications
DiffusionReaction Diffusion and Turing Mechanisms
At time t−4t the particle must have been at x+4x orx−4x so that
p(x, t) =1
2p(x−4x, t−4t) +
1
2p(x+4x, t−4t)
Expanding p(x, t) in a Taylor Series we get
p(x, t) = 12
[p(x, t)−4x ∂p∂x −4t
∂p∂t + 1
2(4x)2 ∂2p∂x2
+(4x)(4t) ∂2p
∂x∂t + 12(4t)2 ∂
2p∂t2
+ . . .
]
+12
[p(x, t) +4x ∂p∂x −4t
∂p∂t + 1
2(4x)2 ∂2p∂x2
−(4x)(4t) ∂2p
∂x∂t + 12(4t)2 ∂
2p∂t2
+ . . .
]Simplifying this we obtain
0 = −4t∂p∂t
+1
2(4x)2
∂2p
∂x2+
1
2(4t)2∂
2p
∂t2+ . . .
Stuart Townley Math Biol - Reaction Diffusion 3/ 33

Reaction Diffusion EquationsMatrix Pencils and Common Lyapunov Functions
CLFs and Turing InstabilityApplications
DiffusionReaction Diffusion and Turing Mechanisms
At time t−4t the particle must have been at x+4x orx−4x so that
p(x, t) =1
2p(x−4x, t−4t) +
1
2p(x+4x, t−4t)
Expanding p(x, t) in a Taylor Series we get
p(x, t) = 12
[p(x, t)−4x ∂p∂x −4t
∂p∂t + 1
2(4x)2 ∂2p∂x2
+(4x)(4t) ∂2p
∂x∂t + 12(4t)2 ∂
2p∂t2
+ . . .
]
+12
[p(x, t) +4x ∂p∂x −4t
∂p∂t + 1
2(4x)2 ∂2p∂x2
−(4x)(4t) ∂2p
∂x∂t + 12(4t)2 ∂
2p∂t2
+ . . .
]
Simplifying this we obtain
0 = −4t∂p∂t
+1
2(4x)2
∂2p
∂x2+
1
2(4t)2∂
2p
∂t2+ . . .
Stuart Townley Math Biol - Reaction Diffusion 3/ 33

Reaction Diffusion EquationsMatrix Pencils and Common Lyapunov Functions
CLFs and Turing InstabilityApplications
DiffusionReaction Diffusion and Turing Mechanisms
At time t−4t the particle must have been at x+4x orx−4x so that
p(x, t) =1
2p(x−4x, t−4t) +
1
2p(x+4x, t−4t)
Expanding p(x, t) in a Taylor Series we get
p(x, t) = 12
[p(x, t)−4x ∂p∂x −4t
∂p∂t + 1
2(4x)2 ∂2p∂x2
+(4x)(4t) ∂2p
∂x∂t + 12(4t)2 ∂
2p∂t2
+ . . .
]
+12
[p(x, t) +4x ∂p∂x −4t
∂p∂t + 1
2(4x)2 ∂2p∂x2
−(4x)(4t) ∂2p
∂x∂t + 12(4t)2 ∂
2p∂t2
+ . . .
]Simplifying this we obtain
0 = −4t∂p∂t
+1
2(4x)2
∂2p
∂x2+
1
2(4t)2∂
2p
∂t2+ . . .
Stuart Townley Math Biol - Reaction Diffusion 3/ 33

Reaction Diffusion EquationsMatrix Pencils and Common Lyapunov Functions
CLFs and Turing InstabilityApplications
DiffusionReaction Diffusion and Turing Mechanisms
So∂p
∂t=
((4x)2
2(4t)
)∂2p
dx2+
1
2(4t)∂
2p
∂t2+ . . .
Assume 4x→ 0, 4t→ 0 such that
lim4t,4x→0
((4x)2
2(4t)
)= D (the diffusion coefficient)
∂p
∂t= D
∂2p
∂x2
the one-dimensional diffusion equation.
Extensions to higher-dimensions in space and more dependentvariables are natural extensions.
Stuart Townley Math Biol - Reaction Diffusion 4/ 33

Reaction Diffusion EquationsMatrix Pencils and Common Lyapunov Functions
CLFs and Turing InstabilityApplications
DiffusionReaction Diffusion and Turing Mechanisms
So∂p
∂t=
((4x)2
2(4t)
)∂2p
dx2+
1
2(4t)∂
2p
∂t2+ . . .
Assume 4x→ 0, 4t→ 0 such that
lim4t,4x→0
((4x)2
2(4t)
)= D (the diffusion coefficient)
∂p
∂t= D
∂2p
∂x2
the one-dimensional diffusion equation.
Extensions to higher-dimensions in space and more dependentvariables are natural extensions.
Stuart Townley Math Biol - Reaction Diffusion 4/ 33

Reaction Diffusion EquationsMatrix Pencils and Common Lyapunov Functions
CLFs and Turing InstabilityApplications
DiffusionReaction Diffusion and Turing Mechanisms
So∂p
∂t=
((4x)2
2(4t)
)∂2p
dx2+
1
2(4t)∂
2p
∂t2+ . . .
Assume 4x→ 0, 4t→ 0 such that
lim4t,4x→0
((4x)2
2(4t)
)= D (the diffusion coefficient)
∂p
∂t= D
∂2p
∂x2
the one-dimensional diffusion equation.
Extensions to higher-dimensions in space and more dependentvariables are natural extensions.
Stuart Townley Math Biol - Reaction Diffusion 4/ 33

Reaction Diffusion EquationsMatrix Pencils and Common Lyapunov Functions
CLFs and Turing InstabilityApplications
DiffusionReaction Diffusion and Turing Mechanisms
So∂p
∂t=
((4x)2
2(4t)
)∂2p
dx2+
1
2(4t)∂
2p
∂t2+ . . .
Assume 4x→ 0, 4t→ 0 such that
lim4t,4x→0
((4x)2
2(4t)
)= D (the diffusion coefficient)
∂p
∂t= D
∂2p
∂x2
the one-dimensional diffusion equation.
Extensions to higher-dimensions in space and more dependentvariables are natural extensions.
Stuart Townley Math Biol - Reaction Diffusion 4/ 33

Reaction Diffusion EquationsMatrix Pencils and Common Lyapunov Functions
CLFs and Turing InstabilityApplications
DiffusionReaction Diffusion and Turing Mechanisms
Turing (1952) proposed that under certain circumstancesdiffusion may act as a destabilising mechanism.
More precisely in the absence of diffusion, linearly stableuniform steady states may persist but addition of diffusionmay drive instabilities.
Let us derive conditions under which this may happen.
Most reaction-diffusion systems of biological interest can benon dimensionalised and scaled to take the general form
ut = γf(u, v) +∇2u vt = γg(u, v) + d∇2v (1)
[The scale factor γ can obviously be incorporated into thereaction kinetics f and g but we keep it separate for now.]We typically have two spatial variables x and y and may havemore than two dependent variables u and v.
Stuart Townley Math Biol - Reaction Diffusion 5/ 33

Reaction Diffusion EquationsMatrix Pencils and Common Lyapunov Functions
CLFs and Turing InstabilityApplications
DiffusionReaction Diffusion and Turing Mechanisms
Turing (1952) proposed that under certain circumstancesdiffusion may act as a destabilising mechanism.
More precisely in the absence of diffusion, linearly stableuniform steady states may persist but addition of diffusionmay drive instabilities.
Let us derive conditions under which this may happen.
Most reaction-diffusion systems of biological interest can benon dimensionalised and scaled to take the general form
ut = γf(u, v) +∇2u vt = γg(u, v) + d∇2v (1)
[The scale factor γ can obviously be incorporated into thereaction kinetics f and g but we keep it separate for now.]We typically have two spatial variables x and y and may havemore than two dependent variables u and v.
Stuart Townley Math Biol - Reaction Diffusion 5/ 33

Reaction Diffusion EquationsMatrix Pencils and Common Lyapunov Functions
CLFs and Turing InstabilityApplications
DiffusionReaction Diffusion and Turing Mechanisms
Turing (1952) proposed that under certain circumstancesdiffusion may act as a destabilising mechanism.
More precisely in the absence of diffusion, linearly stableuniform steady states may persist but addition of diffusionmay drive instabilities.
Let us derive conditions under which this may happen.
Most reaction-diffusion systems of biological interest can benon dimensionalised and scaled to take the general form
ut = γf(u, v) +∇2u vt = γg(u, v) + d∇2v (1)
[The scale factor γ can obviously be incorporated into thereaction kinetics f and g but we keep it separate for now.]We typically have two spatial variables x and y and may havemore than two dependent variables u and v.
Stuart Townley Math Biol - Reaction Diffusion 5/ 33

Reaction Diffusion EquationsMatrix Pencils and Common Lyapunov Functions
CLFs and Turing InstabilityApplications
DiffusionReaction Diffusion and Turing Mechanisms
Turing (1952) proposed that under certain circumstancesdiffusion may act as a destabilising mechanism.
More precisely in the absence of diffusion, linearly stableuniform steady states may persist but addition of diffusionmay drive instabilities.
Let us derive conditions under which this may happen.
Most reaction-diffusion systems of biological interest can benon dimensionalised and scaled to take the general form
ut = γf(u, v) +∇2u vt = γg(u, v) + d∇2v (1)
[The scale factor γ can obviously be incorporated into thereaction kinetics f and g but we keep it separate for now.]We typically have two spatial variables x and y and may havemore than two dependent variables u and v.
Stuart Townley Math Biol - Reaction Diffusion 5/ 33

Reaction Diffusion EquationsMatrix Pencils and Common Lyapunov Functions
CLFs and Turing InstabilityApplications
DiffusionReaction Diffusion and Turing Mechanisms
Here
ut =∂u
∂t,∇2u =
∂2u
∂x2+∂2u
∂y2, etc.
Suppose we have a homogeneous steady state (u0, v0) so that
f(u0, v0) = g(u0, v0) = 0
Let us linearise small perturbations from the steady state anddo so in the absence of diffusion.
Setu = u0 + u, v = v0 + v with |u|, |v| << 1
Thenut = γ[fuu+ fvv]vt = γ[guu+ gvv]
where all partial derivatives are evaluated at (u0, v0)
Stuart Townley Math Biol - Reaction Diffusion 6/ 33

Reaction Diffusion EquationsMatrix Pencils and Common Lyapunov Functions
CLFs and Turing InstabilityApplications
DiffusionReaction Diffusion and Turing Mechanisms
Here
ut =∂u
∂t,∇2u =
∂2u
∂x2+∂2u
∂y2, etc.
Suppose we have a homogeneous steady state (u0, v0) so that
f(u0, v0) = g(u0, v0) = 0
Let us linearise small perturbations from the steady state anddo so in the absence of diffusion.
Setu = u0 + u, v = v0 + v with |u|, |v| << 1
Thenut = γ[fuu+ fvv]vt = γ[guu+ gvv]
where all partial derivatives are evaluated at (u0, v0)
Stuart Townley Math Biol - Reaction Diffusion 6/ 33

Reaction Diffusion EquationsMatrix Pencils and Common Lyapunov Functions
CLFs and Turing InstabilityApplications
DiffusionReaction Diffusion and Turing Mechanisms
Here
ut =∂u
∂t,∇2u =
∂2u
∂x2+∂2u
∂y2, etc.
Suppose we have a homogeneous steady state (u0, v0) so that
f(u0, v0) = g(u0, v0) = 0
Let us linearise small perturbations from the steady state anddo so in the absence of diffusion.
Setu = u0 + u, v = v0 + v with |u|, |v| << 1
Thenut = γ[fuu+ fvv]vt = γ[guu+ gvv]
where all partial derivatives are evaluated at (u0, v0)
Stuart Townley Math Biol - Reaction Diffusion 6/ 33

Reaction Diffusion EquationsMatrix Pencils and Common Lyapunov Functions
CLFs and Turing InstabilityApplications
DiffusionReaction Diffusion and Turing Mechanisms
If
w =
(uv
)then wt = γ
(fu fvgu gv
)w
We look for solutions w ∝ eλt, where λ is an eigenvalue of thelinearised matrix. Then∣∣∣∣ γfu − λ γfv
γgu γgv − λ
∣∣∣∣ = 0 (2)
Recall that we are interested in cases where diffusion leads toinstability so we want the diffusion-free problem to be stable.
For the roots of (2) to have negative real parts we require
fu + gv < 0 (I)fugv − fvgu > 0 (II)
Stuart Townley Math Biol - Reaction Diffusion 7/ 33

Reaction Diffusion EquationsMatrix Pencils and Common Lyapunov Functions
CLFs and Turing InstabilityApplications
DiffusionReaction Diffusion and Turing Mechanisms
If
w =
(uv
)then wt = γ
(fu fvgu gv
)w
We look for solutions w ∝ eλt, where λ is an eigenvalue of thelinearised matrix. Then∣∣∣∣ γfu − λ γfv
γgu γgv − λ
∣∣∣∣ = 0 (2)
Recall that we are interested in cases where diffusion leads toinstability so we want the diffusion-free problem to be stable.
For the roots of (2) to have negative real parts we require
fu + gv < 0 (I)fugv − fvgu > 0 (II)
Stuart Townley Math Biol - Reaction Diffusion 7/ 33

Reaction Diffusion EquationsMatrix Pencils and Common Lyapunov Functions
CLFs and Turing InstabilityApplications
DiffusionReaction Diffusion and Turing Mechanisms
If
w =
(uv
)then wt = γ
(fu fvgu gv
)w
We look for solutions w ∝ eλt, where λ is an eigenvalue of thelinearised matrix. Then∣∣∣∣ γfu − λ γfv
γgu γgv − λ
∣∣∣∣ = 0 (2)
Recall that we are interested in cases where diffusion leads toinstability so we want the diffusion-free problem to be stable.
For the roots of (2) to have negative real parts we require
fu + gv < 0 (I)fugv − fvgu > 0 (II)
Stuart Townley Math Biol - Reaction Diffusion 7/ 33

Reaction Diffusion EquationsMatrix Pencils and Common Lyapunov Functions
CLFs and Turing InstabilityApplications
DiffusionReaction Diffusion and Turing Mechanisms
If
w =
(uv
)then wt = γ
(fu fvgu gv
)w
We look for solutions w ∝ eλt, where λ is an eigenvalue of thelinearised matrix. Then∣∣∣∣ γfu − λ γfv
γgu γgv − λ
∣∣∣∣ = 0 (2)
Recall that we are interested in cases where diffusion leads toinstability so we want the diffusion-free problem to be stable.
For the roots of (2) to have negative real parts we require
fu + gv < 0 (I)fugv − fvgu > 0 (II)
Stuart Townley Math Biol - Reaction Diffusion 7/ 33

Reaction Diffusion EquationsMatrix Pencils and Common Lyapunov Functions
CLFs and Turing InstabilityApplications
DiffusionReaction Diffusion and Turing Mechanisms
Now we reconsider the linearised equations with diffusion andlook for instability
If u = u0 + u, v = v0 + v then on linearisation we have
ut = γ[fuu+ fvv] +∇2u
vt = γ[guu+ gvv] + d∇2v
So, if w =
(uv
), then
wt = γ
(fu fvgu gv
)w +D∇2w D =
(1 00 d
)(3)
This is a PDE. So to make progress we need to specifyrelevant boundary conditions.
Frequently in biological applications zero flux conditions areappropriate (if in a particular application, some other boundarycondition is more natural, then the analysis is easily modified).
Stuart Townley Math Biol - Reaction Diffusion 8/ 33

Reaction Diffusion EquationsMatrix Pencils and Common Lyapunov Functions
CLFs and Turing InstabilityApplications
DiffusionReaction Diffusion and Turing Mechanisms
Now we reconsider the linearised equations with diffusion andlook for instability
If u = u0 + u, v = v0 + v then on linearisation we have
ut = γ[fuu+ fvv] +∇2u
vt = γ[guu+ gvv] + d∇2v
So, if w =
(uv
), then
wt = γ
(fu fvgu gv
)w +D∇2w D =
(1 00 d
)(3)
This is a PDE. So to make progress we need to specifyrelevant boundary conditions.
Frequently in biological applications zero flux conditions areappropriate (if in a particular application, some other boundarycondition is more natural, then the analysis is easily modified).
Stuart Townley Math Biol - Reaction Diffusion 8/ 33

Reaction Diffusion EquationsMatrix Pencils and Common Lyapunov Functions
CLFs and Turing InstabilityApplications
DiffusionReaction Diffusion and Turing Mechanisms
Now we reconsider the linearised equations with diffusion andlook for instability
If u = u0 + u, v = v0 + v then on linearisation we have
ut = γ[fuu+ fvv] +∇2u
vt = γ[guu+ gvv] + d∇2v
So, if w =
(uv
), then
wt = γ
(fu fvgu gv
)w +D∇2w D =
(1 00 d
)(3)
This is a PDE. So to make progress we need to specifyrelevant boundary conditions.
Frequently in biological applications zero flux conditions areappropriate (if in a particular application, some other boundarycondition is more natural, then the analysis is easily modified).
Stuart Townley Math Biol - Reaction Diffusion 8/ 33

Reaction Diffusion EquationsMatrix Pencils and Common Lyapunov Functions
CLFs and Turing InstabilityApplications
DiffusionReaction Diffusion and Turing Mechanisms
Now we reconsider the linearised equations with diffusion andlook for instability
If u = u0 + u, v = v0 + v then on linearisation we have
ut = γ[fuu+ fvv] +∇2u
vt = γ[guu+ gvv] + d∇2v
So, if w =
(uv
), then
wt = γ
(fu fvgu gv
)w +D∇2w D =
(1 00 d
)(3)
This is a PDE. So to make progress we need to specifyrelevant boundary conditions.
Frequently in biological applications zero flux conditions areappropriate (if in a particular application, some other boundarycondition is more natural, then the analysis is easily modified).
Stuart Townley Math Biol - Reaction Diffusion 8/ 33

Reaction Diffusion EquationsMatrix Pencils and Common Lyapunov Functions
CLFs and Turing InstabilityApplications
DiffusionReaction Diffusion and Turing Mechanisms
So how do we solve the linearised PDE (3)?
We proceed by seeking separation of variable solutions usingeigenmodes of the Laplacian.
So let w be the time-independent solution of the eigenvalueproblem:
∇2w+k2w = 0 with boundary conditions. Here w =
(uv
)Here k is an eigenvalue and the corresponding eigenfunctionsgive us a basis in which to expand a solution.
Stuart Townley Math Biol - Reaction Diffusion 9/ 33

Reaction Diffusion EquationsMatrix Pencils and Common Lyapunov Functions
CLFs and Turing InstabilityApplications
DiffusionReaction Diffusion and Turing Mechanisms
So how do we solve the linearised PDE (3)?
We proceed by seeking separation of variable solutions usingeigenmodes of the Laplacian.
So let w be the time-independent solution of the eigenvalueproblem:
∇2w+k2w = 0 with boundary conditions. Here w =
(uv
)Here k is an eigenvalue and the corresponding eigenfunctionsgive us a basis in which to expand a solution.
Stuart Townley Math Biol - Reaction Diffusion 9/ 33

Reaction Diffusion EquationsMatrix Pencils and Common Lyapunov Functions
CLFs and Turing InstabilityApplications
DiffusionReaction Diffusion and Turing Mechanisms
So how do we solve the linearised PDE (3)?
We proceed by seeking separation of variable solutions usingeigenmodes of the Laplacian.
So let w be the time-independent solution of the eigenvalueproblem:
∇2w+k2w = 0 with boundary conditions. Here w =
(uv
)
Here k is an eigenvalue and the corresponding eigenfunctionsgive us a basis in which to expand a solution.
Stuart Townley Math Biol - Reaction Diffusion 9/ 33

Reaction Diffusion EquationsMatrix Pencils and Common Lyapunov Functions
CLFs and Turing InstabilityApplications
DiffusionReaction Diffusion and Turing Mechanisms
So how do we solve the linearised PDE (3)?
We proceed by seeking separation of variable solutions usingeigenmodes of the Laplacian.
So let w be the time-independent solution of the eigenvalueproblem:
∇2w+k2w = 0 with boundary conditions. Here w =
(uv
)Here k is an eigenvalue and the corresponding eigenfunctionsgive us a basis in which to expand a solution.
Stuart Townley Math Biol - Reaction Diffusion 9/ 33

Reaction Diffusion EquationsMatrix Pencils and Common Lyapunov Functions
CLFs and Turing InstabilityApplications
DiffusionReaction Diffusion and Turing Mechanisms
If we denote by wk the eigenfunctions of the eigenvalueproblem, we seek a solution of the original problem (3) of theform
w(x, y, t) = Σkckeλktwk(x, y) (4)
Here the constants, ck, are determined by a “Fourier”expansion of the initial conditions expressed in terms of thewk. We need not worry about this aspect!
We wish to know whether any of the λk have positive realpart (so that diffusion has caused instability).
Substituting (4) into (3) and comparing eigenfunctions gives
Σkckλkeλtwk = γA
(Σkcke
λktwk
)+D∇2
(Σkcke
λktwk
)where A =
(fu fvgu gv
), the community matrix of the
reaction part.
Stuart Townley Math Biol - Reaction Diffusion 10/ 33

Reaction Diffusion EquationsMatrix Pencils and Common Lyapunov Functions
CLFs and Turing InstabilityApplications
DiffusionReaction Diffusion and Turing Mechanisms
If we denote by wk the eigenfunctions of the eigenvalueproblem, we seek a solution of the original problem (3) of theform
w(x, y, t) = Σkckeλktwk(x, y) (4)
Here the constants, ck, are determined by a “Fourier”expansion of the initial conditions expressed in terms of thewk. We need not worry about this aspect!
We wish to know whether any of the λk have positive realpart (so that diffusion has caused instability).
Substituting (4) into (3) and comparing eigenfunctions gives
Σkckλkeλtwk = γA
(Σkcke
λktwk
)+D∇2
(Σkcke
λktwk
)where A =
(fu fvgu gv
), the community matrix of the
reaction part.
Stuart Townley Math Biol - Reaction Diffusion 10/ 33

Reaction Diffusion EquationsMatrix Pencils and Common Lyapunov Functions
CLFs and Turing InstabilityApplications
DiffusionReaction Diffusion and Turing Mechanisms
If we denote by wk the eigenfunctions of the eigenvalueproblem, we seek a solution of the original problem (3) of theform
w(x, y, t) = Σkckeλktwk(x, y) (4)
Here the constants, ck, are determined by a “Fourier”expansion of the initial conditions expressed in terms of thewk. We need not worry about this aspect!
We wish to know whether any of the λk have positive realpart (so that diffusion has caused instability).
Substituting (4) into (3) and comparing eigenfunctions gives
Σkckλkeλtwk = γA
(Σkcke
λktwk
)+D∇2
(Σkcke
λktwk
)where A =
(fu fvgu gv
), the community matrix of the
reaction part.
Stuart Townley Math Biol - Reaction Diffusion 10/ 33

Reaction Diffusion EquationsMatrix Pencils and Common Lyapunov Functions
CLFs and Turing InstabilityApplications
DiffusionReaction Diffusion and Turing Mechanisms
If we denote by wk the eigenfunctions of the eigenvalueproblem, we seek a solution of the original problem (3) of theform
w(x, y, t) = Σkckeλktwk(x, y) (4)
Here the constants, ck, are determined by a “Fourier”expansion of the initial conditions expressed in terms of thewk. We need not worry about this aspect!
We wish to know whether any of the λk have positive realpart (so that diffusion has caused instability).
Substituting (4) into (3) and comparing eigenfunctions gives
Σkckλkeλtwk = γA
(Σkcke
λktwk
)+D∇2
(Σkcke
λktwk
)where A =
(fu fvgu gv
), the community matrix of the
reaction part.
Stuart Townley Math Biol - Reaction Diffusion 10/ 33

Reaction Diffusion EquationsMatrix Pencils and Common Lyapunov Functions
CLFs and Turing InstabilityApplications
DiffusionReaction Diffusion and Turing Mechanisms
This can be written:
Σkckλkeλktwk = γA
(Σkcke
λktwk
)−D
(Σkcke
λktk2wk
)(Since ∇2wk + k2wk = 0 )
But wk are linearly independent.Hence λkwk = γAwk − k2Dwk or
(λkI − γA+ k2D)wk = 0.
Non-trivial solutions λ = λk exist if
det(λI − γA+ k2D) = 0, i.e.∣∣∣∣ λ− γfu + k2 −γfv−γgu λ− γgv + dk2
∣∣∣∣ = 0
Stuart Townley Math Biol - Reaction Diffusion 11/ 33

Reaction Diffusion EquationsMatrix Pencils and Common Lyapunov Functions
CLFs and Turing InstabilityApplications
DiffusionReaction Diffusion and Turing Mechanisms
This can be written:
Σkckλkeλktwk = γA
(Σkcke
λktwk
)−D
(Σkcke
λktk2wk
)(Since ∇2wk + k2wk = 0 )
But wk are linearly independent.Hence λkwk = γAwk − k2Dwk or
(λkI − γA+ k2D)wk = 0.
Non-trivial solutions λ = λk exist if
det(λI − γA+ k2D) = 0, i.e.∣∣∣∣ λ− γfu + k2 −γfv−γgu λ− γgv + dk2
∣∣∣∣ = 0
Stuart Townley Math Biol - Reaction Diffusion 11/ 33

Reaction Diffusion EquationsMatrix Pencils and Common Lyapunov Functions
CLFs and Turing InstabilityApplications
DiffusionReaction Diffusion and Turing Mechanisms
This can be written:
Σkckλkeλktwk = γA
(Σkcke
λktwk
)−D
(Σkcke
λktk2wk
)(Since ∇2wk + k2wk = 0 )
But wk are linearly independent.Hence λkwk = γAwk − k2Dwk or
(λkI − γA+ k2D)wk = 0.
Non-trivial solutions λ = λk exist if
det(λI − γA+ k2D) = 0, i.e.∣∣∣∣ λ− γfu + k2 −γfv−γgu λ− γgv + dk2
∣∣∣∣ = 0
Stuart Townley Math Biol - Reaction Diffusion 11/ 33

Reaction Diffusion EquationsMatrix Pencils and Common Lyapunov Functions
CLFs and Turing InstabilityApplications
DiffusionReaction Diffusion and Turing Mechanisms
So for non-trivial solutions we require:
λ2 + λ[k2(1 + d)− γ(fu + gv)] + h(k2) = 0 (5)
with h(k2) = dk4 − γ(dfu + gv)k2 + γ2(fugv − fvgu)
Remember that we originally wanted diffusion to drive thesystem unstable; that is we want problem (5) to havesolutions with real(λ) > 0 for some k2.
This can happen if either the coefficient of λ is negative or ifh(k2) < 0 for some k.The former is impossible as we have already requiredfu + gv < 0 (condition I)
Now since fugv − fvgu > 0 (condition II)h(k2) can only possibly be negative if
dfu + gv > 0 (III) ( =⇒ d 6= 1 by I)
Stuart Townley Math Biol - Reaction Diffusion 12/ 33

Reaction Diffusion EquationsMatrix Pencils and Common Lyapunov Functions
CLFs and Turing InstabilityApplications
DiffusionReaction Diffusion and Turing Mechanisms
So for non-trivial solutions we require:
λ2 + λ[k2(1 + d)− γ(fu + gv)] + h(k2) = 0 (5)
with h(k2) = dk4 − γ(dfu + gv)k2 + γ2(fugv − fvgu)
Remember that we originally wanted diffusion to drive thesystem unstable; that is we want problem (5) to havesolutions with real(λ) > 0 for some k2.
This can happen if either the coefficient of λ is negative or ifh(k2) < 0 for some k.The former is impossible as we have already requiredfu + gv < 0 (condition I)
Now since fugv − fvgu > 0 (condition II)h(k2) can only possibly be negative if
dfu + gv > 0 (III) ( =⇒ d 6= 1 by I)
Stuart Townley Math Biol - Reaction Diffusion 12/ 33

Reaction Diffusion EquationsMatrix Pencils and Common Lyapunov Functions
CLFs and Turing InstabilityApplications
DiffusionReaction Diffusion and Turing Mechanisms
So for non-trivial solutions we require:
λ2 + λ[k2(1 + d)− γ(fu + gv)] + h(k2) = 0 (5)
with h(k2) = dk4 − γ(dfu + gv)k2 + γ2(fugv − fvgu)
Remember that we originally wanted diffusion to drive thesystem unstable; that is we want problem (5) to havesolutions with real(λ) > 0 for some k2.
This can happen if either the coefficient of λ is negative or ifh(k2) < 0 for some k.The former is impossible as we have already requiredfu + gv < 0 (condition I)
Now since fugv − fvgu > 0 (condition II)h(k2) can only possibly be negative if
dfu + gv > 0 (III) ( =⇒ d 6= 1 by I)
Stuart Townley Math Biol - Reaction Diffusion 12/ 33

Reaction Diffusion EquationsMatrix Pencils and Common Lyapunov Functions
CLFs and Turing InstabilityApplications
DiffusionReaction Diffusion and Turing Mechanisms
So for non-trivial solutions we require:
λ2 + λ[k2(1 + d)− γ(fu + gv)] + h(k2) = 0 (5)
with h(k2) = dk4 − γ(dfu + gv)k2 + γ2(fugv − fvgu)
Remember that we originally wanted diffusion to drive thesystem unstable; that is we want problem (5) to havesolutions with real(λ) > 0 for some k2.
This can happen if either the coefficient of λ is negative or ifh(k2) < 0 for some k.The former is impossible as we have already requiredfu + gv < 0 (condition I)
Now since fugv − fvgu > 0 (condition II)h(k2) can only possibly be negative if
dfu + gv > 0 (III) ( =⇒ d 6= 1 by I)
Stuart Townley Math Biol - Reaction Diffusion 12/ 33

Reaction Diffusion EquationsMatrix Pencils and Common Lyapunov Functions
CLFs and Turing InstabilityApplications
DiffusionReaction Diffusion and Turing Mechanisms
Now observe that
h(k2) = d[k4 − γ
d (dfu + gv)k2 + γ2
d (fugv − fvgu)]
= d[(k2 − γ
2d(dfu + gv))2
+ γ2
d (fugv − fvgu)
− γ2
4d2(dfu + gv)
2]
Therefore the minimum value of h occurs atk2 = γ
2d(dfu + gv). This is the wavenumber of the first modeto become unstable.
Consequently hmin = γ2(fugv + fvgu)− γ2
4d (dfu + gv)2
and so for instability we need hmin < 0, i.e.
(dfu + gv)2 > 4d(fugv − fvgu) (IV )
((I) and (III) =⇒ d 6= 1)
Stuart Townley Math Biol - Reaction Diffusion 13/ 33

Reaction Diffusion EquationsMatrix Pencils and Common Lyapunov Functions
CLFs and Turing InstabilityApplications
DiffusionReaction Diffusion and Turing Mechanisms
Now observe that
h(k2) = d[k4 − γ
d (dfu + gv)k2 + γ2
d (fugv − fvgu)]
= d[(k2 − γ
2d(dfu + gv))2
+ γ2
d (fugv − fvgu)
− γ2
4d2(dfu + gv)
2]
Therefore the minimum value of h occurs atk2 = γ
2d(dfu + gv). This is the wavenumber of the first modeto become unstable.
Consequently hmin = γ2(fugv + fvgu)− γ2
4d (dfu + gv)2
and so for instability we need hmin < 0, i.e.
(dfu + gv)2 > 4d(fugv − fvgu) (IV )
((I) and (III) =⇒ d 6= 1)
Stuart Townley Math Biol - Reaction Diffusion 13/ 33

Reaction Diffusion EquationsMatrix Pencils and Common Lyapunov Functions
CLFs and Turing InstabilityApplications
DiffusionReaction Diffusion and Turing Mechanisms
Now observe that
h(k2) = d[k4 − γ
d (dfu + gv)k2 + γ2
d (fugv − fvgu)]
= d[(k2 − γ
2d(dfu + gv))2
+ γ2
d (fugv − fvgu)
− γ2
4d2(dfu + gv)
2]
Therefore the minimum value of h occurs atk2 = γ
2d(dfu + gv). This is the wavenumber of the first modeto become unstable.
Consequently hmin = γ2(fugv + fvgu)− γ2
4d (dfu + gv)2
and so for instability we need hmin < 0, i.e.
(dfu + gv)2 > 4d(fugv − fvgu) (IV )
((I) and (III) =⇒ d 6= 1)
Stuart Townley Math Biol - Reaction Diffusion 13/ 33

Reaction Diffusion EquationsMatrix Pencils and Common Lyapunov Functions
CLFs and Turing InstabilityApplications
DiffusionReaction Diffusion and Turing Mechanisms
Thinking of the diffusion constant d as a parameter, we seethat there is a critical value of d = dc which leads toinstability.
By (IV) dc satisfies
(dcfu + gv)2 = 4dc(fugv − fvgu)
and the wavenumber of the first unstable mode satisfies
k2crit =γ
2dc(dcfu + gv) =
γ
2dc2√dc√fugv − fvgu
= γ
[fugv − fvgu
dc
] 12
Stuart Townley Math Biol - Reaction Diffusion 14/ 33

Reaction Diffusion EquationsMatrix Pencils and Common Lyapunov Functions
CLFs and Turing InstabilityApplications
DiffusionReaction Diffusion and Turing Mechanisms
Thinking of the diffusion constant d as a parameter, we seethat there is a critical value of d = dc which leads toinstability.
By (IV) dc satisfies
(dcfu + gv)2 = 4dc(fugv − fvgu)
and the wavenumber of the first unstable mode satisfies
k2crit =γ
2dc(dcfu + gv) =
γ
2dc2√dc√fugv − fvgu
= γ
[fugv − fvgu
dc
] 12
Stuart Townley Math Biol - Reaction Diffusion 14/ 33

Reaction Diffusion EquationsMatrix Pencils and Common Lyapunov Functions
CLFs and Turing InstabilityApplications
DiffusionReaction Diffusion and Turing Mechanisms
Consider the diffusion-driven activator-inhibitor system
ut =(u2
v − bu)
+ uxx
vt = (u2 − v) + dvxx
For homogeneous steady solutions u = u0, v = v0 with
u20v0
= bu0, u20 = v0 =⇒ u0 =1
bv0 =
1
b2
Reaction kinetics terms are
f = u2
v − bu g = u2 − vso
fu = 2uv − b fv = −u2
v2
gu = 2u gv = −1
At the steady state
fu = b fv = −b2 gv =2
bgv = −1
Stuart Townley Math Biol - Reaction Diffusion 15/ 33

Reaction Diffusion EquationsMatrix Pencils and Common Lyapunov Functions
CLFs and Turing InstabilityApplications
DiffusionReaction Diffusion and Turing Mechanisms
Consider the diffusion-driven activator-inhibitor system
ut =(u2
v − bu)
+ uxx
vt = (u2 − v) + dvxx
For homogeneous steady solutions u = u0, v = v0 with
u20v0
= bu0, u20 = v0 =⇒ u0 =1
bv0 =
1
b2
Reaction kinetics terms are
f = u2
v − bu g = u2 − vso
fu = 2uv − b fv = −u2
v2
gu = 2u gv = −1
At the steady state
fu = b fv = −b2 gv =2
bgv = −1
Stuart Townley Math Biol - Reaction Diffusion 15/ 33

Reaction Diffusion EquationsMatrix Pencils and Common Lyapunov Functions
CLFs and Turing InstabilityApplications
DiffusionReaction Diffusion and Turing Mechanisms
For stability in the absence of diffusion
fu + gv < 0 =⇒ b− 1 < 0 =⇒ b < 1fugv − fugv > 0 =⇒ −b+ 2b > 0 =⇒ b > 0
}therefore 0 < b < 1
Diffusion-driven instability necessitates
dfu + gv > 0 =⇒ db− 1 > 0 =⇒ db > 1
and (dfu + gv)2 > 4d(fugv − fvgu)
=⇒ (db− 1)2 > 4db
if X = db =⇒ (X − 1)2 > 4X =⇒ X2 − 6X + 1 > 0
Stuart Townley Math Biol - Reaction Diffusion 16/ 33

Reaction Diffusion EquationsMatrix Pencils and Common Lyapunov Functions
CLFs and Turing InstabilityApplications
DiffusionReaction Diffusion and Turing Mechanisms
For stability in the absence of diffusion
fu + gv < 0 =⇒ b− 1 < 0 =⇒ b < 1fugv − fugv > 0 =⇒ −b+ 2b > 0 =⇒ b > 0
}therefore 0 < b < 1
Diffusion-driven instability necessitates
dfu + gv > 0 =⇒ db− 1 > 0 =⇒ db > 1
and (dfu + gv)2 > 4d(fugv − fvgu)
=⇒ (db− 1)2 > 4db
if X = db =⇒ (X − 1)2 > 4X =⇒ X2 − 6X + 1 > 0
Stuart Townley Math Biol - Reaction Diffusion 16/ 33

Reaction Diffusion EquationsMatrix Pencils and Common Lyapunov Functions
CLFs and Turing InstabilityApplications
DiffusionReaction Diffusion and Turing Mechanisms
For stability in the absence of diffusion
fu + gv < 0 =⇒ b− 1 < 0 =⇒ b < 1fugv − fugv > 0 =⇒ −b+ 2b > 0 =⇒ b > 0
}therefore 0 < b < 1
Diffusion-driven instability necessitates
dfu + gv > 0 =⇒ db− 1 > 0 =⇒ db > 1
and (dfu + gv)2 > 4d(fugv − fvgu)
=⇒ (db− 1)2 > 4db
if X = db =⇒ (X − 1)2 > 4X =⇒ X2 − 6X + 1 > 0
Stuart Townley Math Biol - Reaction Diffusion 16/ 33

Reaction Diffusion EquationsMatrix Pencils and Common Lyapunov Functions
CLFs and Turing InstabilityApplications
DiffusionReaction Diffusion and Turing Mechanisms
So (X − 3)2 > 8so X − 3 > 2
√2
or X − 3 < −2√
2
i.e. db > 3 + 2√
2 or db < 3− 2√
2. But d b > 1.
Hence for diffusion to be unstable we require 0 < b < 1 anddb > 3 + 2
√2
We also know that the critical wavenumber kc satisfies
k2c =
[fugv − fvgu
d
] 12
=
(b
d
) 12
But at this point db = 3 + 2√
2 so bd = 3+2
√2
d2and so
k2c =
[3 + 2
√2
d2
]1/2=
1 +√
2
d
Stuart Townley Math Biol - Reaction Diffusion 17/ 33

Reaction Diffusion EquationsMatrix Pencils and Common Lyapunov Functions
CLFs and Turing InstabilityApplications
DiffusionReaction Diffusion and Turing Mechanisms
So (X − 3)2 > 8so X − 3 > 2
√2
or X − 3 < −2√
2
i.e. db > 3 + 2√
2 or db < 3− 2√
2. But d b > 1.
Hence for diffusion to be unstable we require 0 < b < 1 anddb > 3 + 2
√2
We also know that the critical wavenumber kc satisfies
k2c =
[fugv − fvgu
d
] 12
=
(b
d
) 12
But at this point db = 3 + 2√
2 so bd = 3+2
√2
d2and so
k2c =
[3 + 2
√2
d2
]1/2=
1 +√
2
d
Stuart Townley Math Biol - Reaction Diffusion 17/ 33

Reaction Diffusion EquationsMatrix Pencils and Common Lyapunov Functions
CLFs and Turing InstabilityApplications
Common Lyapunov functionsStability vs. existence of a CLF
We will use techniques based around common Lyapunovfunctions to test for DDI in reaction diffusion systems.
A matrix A is stable if all eigenvalues have negative real part.
We write P > 0 (P ≥ 0) to indicate a symmetric positive(positive semi-) definite matrix P ; P < 0 (P ≤ 0) means−P > 0 (−P ≥ 0).
Suppose that Ai, i = 1, . . . , n, is a family of n× n stablematrices. Consider the switching system
x = Aix, i ∈ {1, 2, ...n}. (6)
If there exists P > 0 so that
ATi P + PAi ≤ 0, for all i ∈ {1, 2, ...n}, (7)
then the quadratic function V (x) = xTPx is a CommonLyapunov function (CLF) for the switching system (6).
Stuart Townley Math Biol - Reaction Diffusion 18/ 33

Reaction Diffusion EquationsMatrix Pencils and Common Lyapunov Functions
CLFs and Turing InstabilityApplications
Common Lyapunov functionsStability vs. existence of a CLF
We will use techniques based around common Lyapunovfunctions to test for DDI in reaction diffusion systems.
A matrix A is stable if all eigenvalues have negative real part.
We write P > 0 (P ≥ 0) to indicate a symmetric positive(positive semi-) definite matrix P ; P < 0 (P ≤ 0) means−P > 0 (−P ≥ 0).
Suppose that Ai, i = 1, . . . , n, is a family of n× n stablematrices. Consider the switching system
x = Aix, i ∈ {1, 2, ...n}. (6)
If there exists P > 0 so that
ATi P + PAi ≤ 0, for all i ∈ {1, 2, ...n}, (7)
then the quadratic function V (x) = xTPx is a CommonLyapunov function (CLF) for the switching system (6).
Stuart Townley Math Biol - Reaction Diffusion 18/ 33

Reaction Diffusion EquationsMatrix Pencils and Common Lyapunov Functions
CLFs and Turing InstabilityApplications
Common Lyapunov functionsStability vs. existence of a CLF
We will use techniques based around common Lyapunovfunctions to test for DDI in reaction diffusion systems.
A matrix A is stable if all eigenvalues have negative real part.
We write P > 0 (P ≥ 0) to indicate a symmetric positive(positive semi-) definite matrix P ; P < 0 (P ≤ 0) means−P > 0 (−P ≥ 0).
Suppose that Ai, i = 1, . . . , n, is a family of n× n stablematrices. Consider the switching system
x = Aix, i ∈ {1, 2, ...n}. (6)
If there exists P > 0 so that
ATi P + PAi ≤ 0, for all i ∈ {1, 2, ...n}, (7)
then the quadratic function V (x) = xTPx is a CommonLyapunov function (CLF) for the switching system (6).
Stuart Townley Math Biol - Reaction Diffusion 18/ 33

Reaction Diffusion EquationsMatrix Pencils and Common Lyapunov Functions
CLFs and Turing InstabilityApplications
Common Lyapunov functionsStability vs. existence of a CLF
We will use techniques based around common Lyapunovfunctions to test for DDI in reaction diffusion systems.
A matrix A is stable if all eigenvalues have negative real part.
We write P > 0 (P ≥ 0) to indicate a symmetric positive(positive semi-) definite matrix P ; P < 0 (P ≤ 0) means−P > 0 (−P ≥ 0).
Suppose that Ai, i = 1, . . . , n, is a family of n× n stablematrices. Consider the switching system
x = Aix, i ∈ {1, 2, ...n}. (6)
If there exists P > 0 so that
ATi P + PAi ≤ 0, for all i ∈ {1, 2, ...n}, (7)
then the quadratic function V (x) = xTPx is a CommonLyapunov function (CLF) for the switching system (6).
Stuart Townley Math Biol - Reaction Diffusion 18/ 33

Reaction Diffusion EquationsMatrix Pencils and Common Lyapunov Functions
CLFs and Turing InstabilityApplications
Common Lyapunov functionsStability vs. existence of a CLF
We will use techniques based around common Lyapunovfunctions to test for DDI in reaction diffusion systems.
A matrix A is stable if all eigenvalues have negative real part.
We write P > 0 (P ≥ 0) to indicate a symmetric positive(positive semi-) definite matrix P ; P < 0 (P ≤ 0) means−P > 0 (−P ≥ 0).
Suppose that Ai, i = 1, . . . , n, is a family of n× n stablematrices. Consider the switching system
x = Aix, i ∈ {1, 2, ...n}. (6)
If there exists P > 0 so that
ATi P + PAi ≤ 0, for all i ∈ {1, 2, ...n}, (7)
then the quadratic function V (x) = xTPx is a CommonLyapunov function (CLF) for the switching system (6).
Stuart Townley Math Biol - Reaction Diffusion 18/ 33

Reaction Diffusion EquationsMatrix Pencils and Common Lyapunov Functions
CLFs and Turing InstabilityApplications
Common Lyapunov functionsStability vs. existence of a CLF
Shorten and Narendra derived necessary and sufficientconditions for the existence of a CLF for a finite number ofstable second order systems.
A pair of 2× 2 stable matrices A1 and A2 have a commonLyapunov function with strict inequality in (7) if, and only if,the matrices A1A2
−1 and A1A2 have no negative realeigenvalues.
We will apply the notion of CLF to the stable matrices A and−D where A is the linearised reaction matrix and D is thediffusion matrix in a reaction diffusion system.
Even when one matrix is diagonal, the existence of CLFs issubtle as illustrated by the following example.
Stuart Townley Math Biol - Reaction Diffusion 19/ 33

Reaction Diffusion EquationsMatrix Pencils and Common Lyapunov Functions
CLFs and Turing InstabilityApplications
Common Lyapunov functionsStability vs. existence of a CLF
Shorten and Narendra derived necessary and sufficientconditions for the existence of a CLF for a finite number ofstable second order systems.
A pair of 2× 2 stable matrices A1 and A2 have a commonLyapunov function with strict inequality in (7) if, and only if,the matrices A1A2
−1 and A1A2 have no negative realeigenvalues.
We will apply the notion of CLF to the stable matrices A and−D where A is the linearised reaction matrix and D is thediffusion matrix in a reaction diffusion system.
Even when one matrix is diagonal, the existence of CLFs issubtle as illustrated by the following example.
Stuart Townley Math Biol - Reaction Diffusion 19/ 33

Reaction Diffusion EquationsMatrix Pencils and Common Lyapunov Functions
CLFs and Turing InstabilityApplications
Common Lyapunov functionsStability vs. existence of a CLF
Shorten and Narendra derived necessary and sufficientconditions for the existence of a CLF for a finite number ofstable second order systems.
A pair of 2× 2 stable matrices A1 and A2 have a commonLyapunov function with strict inequality in (7) if, and only if,the matrices A1A2
−1 and A1A2 have no negative realeigenvalues.
We will apply the notion of CLF to the stable matrices A and−D where A is the linearised reaction matrix and D is thediffusion matrix in a reaction diffusion system.
Even when one matrix is diagonal, the existence of CLFs issubtle as illustrated by the following example.
Stuart Townley Math Biol - Reaction Diffusion 19/ 33

Reaction Diffusion EquationsMatrix Pencils and Common Lyapunov Functions
CLFs and Turing InstabilityApplications
Common Lyapunov functionsStability vs. existence of a CLF
Consider the following stable matrices supposed to arise fromlinearising a reaction system around a steady state:
A1 =
(−1 0.20 −1
), A2 =
(−2 60 −3
), A3 =
(2 −18 −3
)with common diffusion matrix
D =
(1 00 5
).
The identity is a CLF for A1 and −D but not for A2 and −DA3 and −D have no CLF (since −A3D
−1 has eigenvalues−1,−0.4).
P =
(3 11 5
)is a CLF for A2 and D.
Stuart Townley Math Biol - Reaction Diffusion 20/ 33

Reaction Diffusion EquationsMatrix Pencils and Common Lyapunov Functions
CLFs and Turing InstabilityApplications
Common Lyapunov functionsStability vs. existence of a CLF
Consider the following stable matrices supposed to arise fromlinearising a reaction system around a steady state:
A1 =
(−1 0.20 −1
), A2 =
(−2 60 −3
), A3 =
(2 −18 −3
)with common diffusion matrix
D =
(1 00 5
).
The identity is a CLF for A1 and −D but not for A2 and −D
A3 and −D have no CLF (since −A3D−1 has eigenvalues
−1,−0.4).
P =
(3 11 5
)is a CLF for A2 and D.
Stuart Townley Math Biol - Reaction Diffusion 20/ 33

Reaction Diffusion EquationsMatrix Pencils and Common Lyapunov Functions
CLFs and Turing InstabilityApplications
Common Lyapunov functionsStability vs. existence of a CLF
Consider the following stable matrices supposed to arise fromlinearising a reaction system around a steady state:
A1 =
(−1 0.20 −1
), A2 =
(−2 60 −3
), A3 =
(2 −18 −3
)with common diffusion matrix
D =
(1 00 5
).
The identity is a CLF for A1 and −D but not for A2 and −DA3 and −D have no CLF (since −A3D
−1 has eigenvalues−1,−0.4).
P =
(3 11 5
)is a CLF for A2 and D.
Stuart Townley Math Biol - Reaction Diffusion 20/ 33

Reaction Diffusion EquationsMatrix Pencils and Common Lyapunov Functions
CLFs and Turing InstabilityApplications
Common Lyapunov functionsStability vs. existence of a CLF
Consider the following stable matrices supposed to arise fromlinearising a reaction system around a steady state:
A1 =
(−1 0.20 −1
), A2 =
(−2 60 −3
), A3 =
(2 −18 −3
)with common diffusion matrix
D =
(1 00 5
).
The identity is a CLF for A1 and −D but not for A2 and −DA3 and −D have no CLF (since −A3D
−1 has eigenvalues−1,−0.4).
P =
(3 11 5
)is a CLF for A2 and D.
Stuart Townley Math Biol - Reaction Diffusion 20/ 33

Reaction Diffusion EquationsMatrix Pencils and Common Lyapunov Functions
CLFs and Turing InstabilityApplications
DDI, Reactivity and CLFs
The systemdx
dt= Ax
is reactive i.e. exhibits initial growth, when A+AT has apositive eigenvalue, equivalently when I is not a Lypaunovmatrix for A.
When I is a Lyapunov function for A then I is a Lyapunovmatrix for A− k2D and so A−K2D is stable for all k andany diffusion matrix D.
Therefore DDI implies A is reactive (see Neubert, Caswell andMurray) and reactivity is necessary for DDI.
Stuart Townley Math Biol - Reaction Diffusion 21/ 33

Reaction Diffusion EquationsMatrix Pencils and Common Lyapunov Functions
CLFs and Turing InstabilityApplications
DDI, Reactivity and CLFs
The systemdx
dt= Ax
is reactive i.e. exhibits initial growth, when A+AT has apositive eigenvalue, equivalently when I is not a Lypaunovmatrix for A.
When I is a Lyapunov function for A then I is a Lyapunovmatrix for A− k2D and so A−K2D is stable for all k andany diffusion matrix D.
Therefore DDI implies A is reactive (see Neubert, Caswell andMurray) and reactivity is necessary for DDI.
Stuart Townley Math Biol - Reaction Diffusion 21/ 33

Reaction Diffusion EquationsMatrix Pencils and Common Lyapunov Functions
CLFs and Turing InstabilityApplications
DDI, Reactivity and CLFs
The systemdx
dt= Ax
is reactive i.e. exhibits initial growth, when A+AT has apositive eigenvalue, equivalently when I is not a Lypaunovmatrix for A.
When I is a Lyapunov function for A then I is a Lyapunovmatrix for A− k2D and so A−K2D is stable for all k andany diffusion matrix D.
Therefore DDI implies A is reactive (see Neubert, Caswell andMurray) and reactivity is necessary for DDI.
Stuart Townley Math Biol - Reaction Diffusion 21/ 33

Reaction Diffusion EquationsMatrix Pencils and Common Lyapunov Functions
CLFs and Turing InstabilityApplications
DDI, Reactivity and CLFs
We are interested in whether the matrix A− k2D has aneigenvalue with positive real part for some (wave number) k.
When I is a Lypaunov matrix for A (and hence a CLF for Aand −D) then DDI is not possible.
If A and −D have a CLF, then similarly DDI is not possiblesince{ATP + PA < 0 and(−D)P + P (−D) < 0
=⇒ (A−k2D)TP+P (A−k2D)P < 0
for all k.
Whilst simple, this result is very powerful in applications.Why? Testing whether pairs of matrices share a CLF isdetermined using SEMI-DEFINITE PROGRAMMING e.g.using cvx in Matlab - even in high dimensions!
Stuart Townley Math Biol - Reaction Diffusion 22/ 33

Reaction Diffusion EquationsMatrix Pencils and Common Lyapunov Functions
CLFs and Turing InstabilityApplications
DDI, Reactivity and CLFs
We are interested in whether the matrix A− k2D has aneigenvalue with positive real part for some (wave number) k.
When I is a Lypaunov matrix for A (and hence a CLF for Aand −D) then DDI is not possible.
If A and −D have a CLF, then similarly DDI is not possiblesince{ATP + PA < 0 and(−D)P + P (−D) < 0
=⇒ (A−k2D)TP+P (A−k2D)P < 0
for all k.
Whilst simple, this result is very powerful in applications.Why? Testing whether pairs of matrices share a CLF isdetermined using SEMI-DEFINITE PROGRAMMING e.g.using cvx in Matlab - even in high dimensions!
Stuart Townley Math Biol - Reaction Diffusion 22/ 33

Reaction Diffusion EquationsMatrix Pencils and Common Lyapunov Functions
CLFs and Turing InstabilityApplications
DDI, Reactivity and CLFs
We are interested in whether the matrix A− k2D has aneigenvalue with positive real part for some (wave number) k.
When I is a Lypaunov matrix for A (and hence a CLF for Aand −D) then DDI is not possible.
If A and −D have a CLF, then similarly DDI is not possiblesince{ATP + PA < 0 and(−D)P + P (−D) < 0
=⇒ (A−k2D)TP+P (A−k2D)P < 0
for all k.
Whilst simple, this result is very powerful in applications.Why? Testing whether pairs of matrices share a CLF isdetermined using SEMI-DEFINITE PROGRAMMING e.g.using cvx in Matlab - even in high dimensions!
Stuart Townley Math Biol - Reaction Diffusion 22/ 33

Reaction Diffusion EquationsMatrix Pencils and Common Lyapunov Functions
CLFs and Turing InstabilityApplications
DDI, Reactivity and CLFs
We are interested in whether the matrix A− k2D has aneigenvalue with positive real part for some (wave number) k.
When I is a Lypaunov matrix for A (and hence a CLF for Aand −D) then DDI is not possible.
If A and −D have a CLF, then similarly DDI is not possiblesince{ATP + PA < 0 and(−D)P + P (−D) < 0
=⇒ (A−k2D)TP+P (A−k2D)P < 0
for all k.
Whilst simple, this result is very powerful in applications.Why? Testing whether pairs of matrices share a CLF isdetermined using SEMI-DEFINITE PROGRAMMING e.g.using cvx in Matlab - even in high dimensions!
Stuart Townley Math Biol - Reaction Diffusion 22/ 33

Reaction Diffusion EquationsMatrix Pencils and Common Lyapunov Functions
CLFs and Turing InstabilityApplications
DDI, Reactivity and CLFs
To load cvx: Check out Steve Boyd at Stanford cvx_setup To run cvx: Key in A and D. Then run: cvx_begin sdp variable P(n,n) symmetric A'*P+P*A<zeros(n); -‐D'*P-‐P*D<zeros(n); P>=eye(n); cvx_end
Matlab Code
Stuart Townley Math Biol - Reaction Diffusion 23/ 33

Reaction Diffusion EquationsMatrix Pencils and Common Lyapunov Functions
CLFs and Turing InstabilityApplications
Gierer-Meinhardt ModelHost-parasite-hyperparasite interactionSchnakenberg diffusion-chemotaxis modelSummary
A simple inhibitor-activator PDE model describing the regenerativegrowth of Hydra:
∂a∂t = ρρ0 + c1ρ
a2
h − µa+ d1∇2xa
∂h∂t = c2ρ
′a2 − νh+ d2∇2
xh.
a(x, t) and h(x, t) are the activator and inhibitor concentrations atposition x and time t.The parameters
Set 1: c1 = 0.005, c2 = 0.035, d1 = 0.03, d2 = 0.45,ρ′
= 0.075 and ρ = ρ0 = 3.2.
Set 2: c1 = 0.05, c2 = 0.025, d1 = 0.03, d2 = 0.45,ρ′
= 0.00075 and ρ = ρ0 = 3.2
Stuart Townley Math Biol - Reaction Diffusion 24/ 33

Reaction Diffusion EquationsMatrix Pencils and Common Lyapunov Functions
CLFs and Turing InstabilityApplications
Gierer-Meinhardt ModelHost-parasite-hyperparasite interactionSchnakenberg diffusion-chemotaxis modelSummary
0 0.05 0.1 0.15 0.2 0.25 0.3 0.35 0.4 0.45 0.50
0.02
0.04
0.06
0.08
0.1
0.12
0.14
0.16
0.18
I is a CLF
DDI region
Instability region
µ
there exists a CLF ( not I )
Figure: For Set 1: Parameters (µ, ν) where there is DDI, I is a CLF andthere is a CLF.
Stuart Townley Math Biol - Reaction Diffusion 25/ 33

Reaction Diffusion EquationsMatrix Pencils and Common Lyapunov Functions
CLFs and Turing InstabilityApplications
Gierer-Meinhardt ModelHost-parasite-hyperparasite interactionSchnakenberg diffusion-chemotaxis modelSummary
0 0.05 0.1 0.15 0.2 0.25 0.3 0.35 0.4 0.45 0.50
0.2
0.4
0.6
0.8
1
1.2x 10 4
µ
Instability region
I is a CLF
There exists a CLF ( not I )
Figure: For Set2: Parameters (µ, ν) where I is a CLF and there is a CLF.Here there is no DDI
Stuart Townley Math Biol - Reaction Diffusion 26/ 33

Reaction Diffusion EquationsMatrix Pencils and Common Lyapunov Functions
CLFs and Turing InstabilityApplications
Gierer-Meinhardt ModelHost-parasite-hyperparasite interactionSchnakenberg diffusion-chemotaxis modelSummary
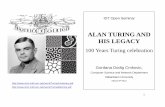
Here we consider a three dependent variable model (and so thewell known parameter test for DDI does not apply). It describes aspatial model for the interaction of a host (u), a parasite (v) and ahyper-parasite (w).
∂u
∂t= τ [u(1− u
K)− uv] + d1∇2u
∂v
∂t= τµ[
uv
1 + γ− vw
1 + γv] + d2∇2v
∂w
∂t= τd[v − w] + d3∇2w.
The parametersd1 = 0.02, d2 = 0.2, d3 = 1, µ = 15, K = 10 and τ = 1.
Stuart Townley Math Biol - Reaction Diffusion 27/ 33

Reaction Diffusion EquationsMatrix Pencils and Common Lyapunov Functions
CLFs and Turing InstabilityApplications
Gierer-Meinhardt ModelHost-parasite-hyperparasite interactionSchnakenberg diffusion-chemotaxis modelSummary
0 0.5 1 1.50
0.5
1
1.5
2
2.5
There exists a CLFInstability region No CLF
.
g
d
0 5 1040
20
0
(0.8,0.8)
0 5 1040
20
0
(0.8,2)
..
Stuart Townley Math Biol - Reaction Diffusion 28/ 33

Reaction Diffusion EquationsMatrix Pencils and Common Lyapunov Functions
CLFs and Turing InstabilityApplications
Gierer-Meinhardt ModelHost-parasite-hyperparasite interactionSchnakenberg diffusion-chemotaxis modelSummary
In our set up, indeed in the standard Turing instability framework,D is supposed to be diagonal. However, this is not an essentialingredient of our approach and the CLF-based approach stillapplies. This is useful for applications where other “movement”mechanisms are invoked.For example, a common movement mechanism is based on“chemotaxis” which mathematically brings in cross-derivatives.A simple model in which this arises is in the Schnakenbergdiffusion-chemotaxis model:
∂u
∂t= γ(a− u+ u2v) +∇2u− α∇.(u∇v),
∂v
∂t= γ(b− u2v) + d∇2v
Stuart Townley Math Biol - Reaction Diffusion 29/ 33

Reaction Diffusion EquationsMatrix Pencils and Common Lyapunov Functions
CLFs and Turing InstabilityApplications
Gierer-Meinhardt ModelHost-parasite-hyperparasite interactionSchnakenberg diffusion-chemotaxis modelSummary
Linearisation around the equilibrium (a+ b, b/(a+ b)2) leads to thereaction-diffusion-chemotaxis matrix pencil:
A− ||ω||2Dα,
where
A =
( b−aa+b (a+ b)2
−2ba+b −(a+ b)2
), Dα =
(1 −α(a+ b)0 d
).
Stuart Townley Math Biol - Reaction Diffusion 30/ 33

Reaction Diffusion EquationsMatrix Pencils and Common Lyapunov Functions
CLFs and Turing InstabilityApplications
Gierer-Meinhardt ModelHost-parasite-hyperparasite interactionSchnakenberg diffusion-chemotaxis modelSummary
a
bd=100
I is a CLF
NO CLF
There exists a CLF ( not I )
0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
Figure: The parameter used here are d = 100,γ = 1 and α = 20.
Stuart Townley Math Biol - Reaction Diffusion 31/ 33

Reaction Diffusion EquationsMatrix Pencils and Common Lyapunov Functions
CLFs and Turing InstabilityApplications
Gierer-Meinhardt ModelHost-parasite-hyperparasite interactionSchnakenberg diffusion-chemotaxis modelSummary
a
b
d=10
0.2 0.4 0.6 0.8
0.2
0.4
0.6
0.8
a
b
d=25
0.2 0.4 0.6 0.8
0.2
0.4
0.6
0.8
a
b
d=100
0.2 0.4 0.6 0.8
0.2
0.4
0.6
0.8
a
b
d=1000
0.2 0.4 0.6 0.8
0.2
0.4
0.6
0.8
Figure: To the right of the red curve no pattern formation is possible asthe diffusion coefficient d is increased: d = 10, 25, 100 and 1000.
Stuart Townley Math Biol - Reaction Diffusion 32/ 33

Reaction Diffusion EquationsMatrix Pencils and Common Lyapunov Functions
CLFs and Turing InstabilityApplications
Gierer-Meinhardt ModelHost-parasite-hyperparasite interactionSchnakenberg diffusion-chemotaxis modelSummary
Using ideas from switched systems we present a strongnecessary condition for DDI or better put a strong sufficientcondition for there not to be DDI
If there exists a common Lyapunov function for A and thediffusion/chemotaxis coefficient matrix D, thendiffusion/chemotaxis driven pattern formation is not possible.
Testing for the existence of CLFs is a semi-definiteprogramming problem which can be solved numerically usingcvx in Matlab.
It provides a more systematic search for parameter domains onwhich pattern formation is possible compared to ad hocmethods based on computing the dispersion relation forspecific parameters
It is a simple, but powerful, generalisation of the “reactivity isnecessary” results of Neubert et al.
Stuart Townley Math Biol - Reaction Diffusion 33/ 33

Reaction Diffusion EquationsMatrix Pencils and Common Lyapunov Functions
CLFs and Turing InstabilityApplications
Gierer-Meinhardt ModelHost-parasite-hyperparasite interactionSchnakenberg diffusion-chemotaxis modelSummary
Using ideas from switched systems we present a strongnecessary condition for DDI or better put a strong sufficientcondition for there not to be DDI
If there exists a common Lyapunov function for A and thediffusion/chemotaxis coefficient matrix D, thendiffusion/chemotaxis driven pattern formation is not possible.
Testing for the existence of CLFs is a semi-definiteprogramming problem which can be solved numerically usingcvx in Matlab.
It provides a more systematic search for parameter domains onwhich pattern formation is possible compared to ad hocmethods based on computing the dispersion relation forspecific parameters
It is a simple, but powerful, generalisation of the “reactivity isnecessary” results of Neubert et al.
Stuart Townley Math Biol - Reaction Diffusion 33/ 33

Reaction Diffusion EquationsMatrix Pencils and Common Lyapunov Functions
CLFs and Turing InstabilityApplications
Gierer-Meinhardt ModelHost-parasite-hyperparasite interactionSchnakenberg diffusion-chemotaxis modelSummary
Using ideas from switched systems we present a strongnecessary condition for DDI or better put a strong sufficientcondition for there not to be DDI
If there exists a common Lyapunov function for A and thediffusion/chemotaxis coefficient matrix D, thendiffusion/chemotaxis driven pattern formation is not possible.
Testing for the existence of CLFs is a semi-definiteprogramming problem which can be solved numerically usingcvx in Matlab.
It provides a more systematic search for parameter domains onwhich pattern formation is possible compared to ad hocmethods based on computing the dispersion relation forspecific parameters
It is a simple, but powerful, generalisation of the “reactivity isnecessary” results of Neubert et al.
Stuart Townley Math Biol - Reaction Diffusion 33/ 33

Reaction Diffusion EquationsMatrix Pencils and Common Lyapunov Functions
CLFs and Turing InstabilityApplications
Gierer-Meinhardt ModelHost-parasite-hyperparasite interactionSchnakenberg diffusion-chemotaxis modelSummary
Using ideas from switched systems we present a strongnecessary condition for DDI or better put a strong sufficientcondition for there not to be DDI
If there exists a common Lyapunov function for A and thediffusion/chemotaxis coefficient matrix D, thendiffusion/chemotaxis driven pattern formation is not possible.
Testing for the existence of CLFs is a semi-definiteprogramming problem which can be solved numerically usingcvx in Matlab.
It provides a more systematic search for parameter domains onwhich pattern formation is possible compared to ad hocmethods based on computing the dispersion relation forspecific parameters
It is a simple, but powerful, generalisation of the “reactivity isnecessary” results of Neubert et al.
Stuart Townley Math Biol - Reaction Diffusion 33/ 33

Reaction Diffusion EquationsMatrix Pencils and Common Lyapunov Functions
CLFs and Turing InstabilityApplications
Gierer-Meinhardt ModelHost-parasite-hyperparasite interactionSchnakenberg diffusion-chemotaxis modelSummary
Using ideas from switched systems we present a strongnecessary condition for DDI or better put a strong sufficientcondition for there not to be DDI
If there exists a common Lyapunov function for A and thediffusion/chemotaxis coefficient matrix D, thendiffusion/chemotaxis driven pattern formation is not possible.
Testing for the existence of CLFs is a semi-definiteprogramming problem which can be solved numerically usingcvx in Matlab.
It provides a more systematic search for parameter domains onwhich pattern formation is possible compared to ad hocmethods based on computing the dispersion relation forspecific parameters
It is a simple, but powerful, generalisation of the “reactivity isnecessary” results of Neubert et al.
Stuart Townley Math Biol - Reaction Diffusion 33/ 33














![Solving Stiff Reaction-Diffusion Equations Using ... · Reaction diffusion models have been studied extensively since the RD theory first proposed by Turing [2] to describe the range](https://static.fdocuments.in/doc/165x107/602a72fd5df8b5738425bdf7/solving-stiff-reaction-diffusion-equations-using-reaction-diffusion-models-have.jpg)