MAT 1025: Chapter 9. The Trigonometric Identities &...
22
MAT 1025: 0 MAT 1025: Chapter 9. The Trigonometric Identities & Their Applications Prof Wm C Bauldry Dept of Mathematical Sciences Fall, 2011 §9.1 §9.2 §9.3
Transcript of MAT 1025: Chapter 9. The Trigonometric Identities &...

MAT 1025: 0
MAT 1025: Chapter 9. The TrigonometricIdentities & Their Applications
Prof Wm C Bauldry
Dept of Mathematical Sciences
Fall, 2011
§9.1 §9.2 §9.3

MAT 1025: 1
9.1 Identities, Expressions, and Equations
PendulumsGalileo Galilei was the first to carefullystudy pendulums; he discovered that theperiod of a pendulum is determined by thelength of the support, not by the mass ofthe bob.
Leon Foucault proposed that a pendu-lum’s path would stay fixed as the earthmoved; his experiment proved the earthrotated. Foucault’s pendulum appeared to
Pendule de Foucaultdu Pantheon de Paris
slowly rotate. The angular velocity of rotation is
T = 2π sin(Lat) radday
We will need trigonometric identities to model the path a Foucaultpendulum follows.
MAT 1025: 2
Pythagorus and Identities
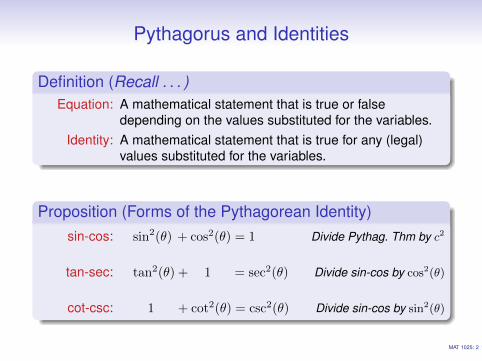
Definition (Recall . . . )Equation: A mathematical statement that is true or false
depending on the values substituted for the variables.Identity: A mathematical statement that is true for any (legal)
values substituted for the variables.
Proposition (Forms of the Pythagorean Identity)sin-cos: sin2(θ) + cos2(θ) = 1 Divide Pythag. Thm by c2
tan-sec: tan2(θ) + 1 = sec2(θ) Divide sin-cos by cos2(θ)
cot-csc: 1 + cot2(θ) = csc2(θ) Divide sin-cos by sin2(θ)

MAT 1025: 3
All For One
In Terms of Sine1
sin(θ)= sin(θ)
cos(θ)=±√1− sin2(θ) = sin(θ + π/2)
tan(θ)=± sin(θ)/√
1− sin2(θ) = sin(θ)/sin(θ + π/2)
cot(θ)=±√1− sin2(θ)
/sin(θ) = sin(θ + π/2)
/sin(θ)
sec(θ)=±1/√
1− sin2(θ) = 1/sin(θ + π/2)
csc(θ)= 1/sin(θ)
1TI calculators do not have cot, sec, or csc; use reciprocals to find values.

MAT 1025: 4
Expressions and IdentitiesSimplifying
1. Simplify y = 3 cos(t)(2− 5 tan(t))
1.1 Expand: y = 6 cos(t)− 15 cos(t) tan(t)
1.2 Apply the identity: cos(t) tan(t) = sin(t)
1.3 Then y = 6 cos(t)− 15 sin(t)
2. Simplify z =1
1 + cos(θ)+
1
1− cos(θ)
2.1 Form a common denominator:
z =1− cos(θ)
[1 + cos(θ)][1− cos(θ)]+
1 + cos(θ)
[1− cos(θ)][1 + cos(θ)]
2.2 Combine: z =1− cos(θ)
1− cos2(θ)+
1 + cos(θ)
1− cos2(θ)=
2
1− cos2(θ)
2.3 Apply the identity 1− cos2(θ) = sin2(θ)
2.4 Then z =2
sin2(θ)or z = 2 csc2(θ)

MAT 1025: 5
Double Angle Identities
Algebraic Derivation1. Recall de Moivre’s Formula: [cos(t)+i sin(t)]n=cos(nt)+ i sin(nt)
2. Set n = 2: [cos(t) + i sin(t)]2 = cos(2t) + i sin(2t)
3. Expand: [cos2(t)− sin2(t)] + i 2 sin(t) cos(t) = cos(2t) + i sin(2t)
4. The real and imaginary parts of the two sides must be equal
Proposition (Double Angle Formulas)For all real θ
sin(2θ) = 2 sin(θ) cos(θ)
cos(2θ) = cos2(θ)− sin2(θ)
tan(2θ) =2 tan(θ)
1− tan2(θ)(Divide the first two)

MAT 1025: 6
A TripleA Triple Angle Formula
1. Set n = 3 in de Moivre’s formula:
[cos(t) + i sin(t)]3 = cos(3t) + i sin(3t)
2. Expand the left side:
cos3(t) + 3i cos2(t) sin(t) + 3i2 cos(t) sin2(t) + i3 sin3(t)
3. Simplify with i2 = −1 and i3 = −i, then collect real and imaginary parts:
< = cos3(t)− 3 cos(t) sin2(t) and = = 3 cos2(t) sin(t)− sin3(t)
4. Use an identity to replace sin2(t) in < to have just cosine terms:
< = cos3(t)− 3 cos(t)[1− cos2(t)] = 4 cos3(t)− 3 cos(t)
5. Do the same for cos2(t) in = (Exercise!)
Aha! The identity for cos(3θ) is: cos(3θ) = 4 cos3(t)− 3 cos(t)

MAT 1025: 7
Equations and Identities
Solving EquationsSolve tan(2x) = tan(x) for x.
1. Use the double angle identity for tan(2x):
2 tan(x)
1− tan2(x)= tan(x)
2. Multiply both sides by 1− tan2(x) assuming it’s 6= 0, (x 6= ±π/4)2 tan(x) = tan(x)[1− tan2(x)] = tan(x)− tan3(x)
3. Use standard factoring techniques:
tan3(x) + tan(x) = tan(x)[tan2(x) + 1] = 0
4. Since tan2(x) 6= −1 for real x, we have tan(x) = 0. Thus x = 0.
5. Using periodicity, x = nπ for n ∈ Z

MAT 1025: 8
9.2 Sum and Difference Formulas
Surveying Reprise
The USA was surveyed in the1800’s. An arc along the 39th par-allel was traversed across the en-tire country. Traversing an arc in-volves connecting triangles; calcu-lating the distances involves trig,often with functions of the sum anddifference of angles.
The office of The Coast andGeodetic Survey was responsiblefor carrying out the survey and re-porting their findings to Congress.The survey produced accuratemaps of the US.
MAT 1025: 9
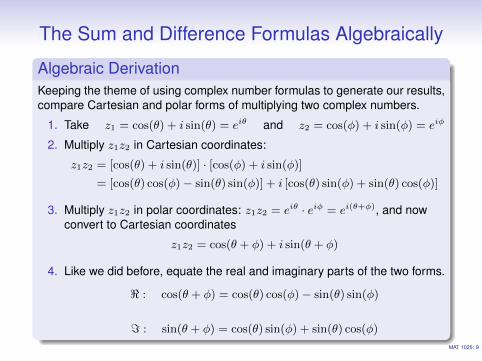
The Sum and Difference Formulas Algebraically
Algebraic DerivationKeeping the theme of using complex number formulas to generate our results,compare Cartesian and polar forms of multiplying two complex numbers.
1. Take z1 = cos(θ) + i sin(θ) = eiθ and z2 = cos(φ) + i sin(φ) = eiφ
2. Multiply z1z2 in Cartesian coordinates:
z1z2 = [cos(θ) + i sin(θ)] · [cos(φ) + i sin(φ)]
= [cos(θ) cos(φ)− sin(θ) sin(φ)] + i [cos(θ) sin(φ) + sin(θ) cos(φ)]
3. Multiply z1z2 in polar coordinates: z1z2 = eiθ · eiφ = ei(θ+φ), and nowconvert to Cartesian coordinates
z1z2 = cos(θ + φ) + i sin(θ + φ)
4. Like we did before, equate the real and imaginary parts of the two forms.
< : cos(θ + φ) = cos(θ) cos(φ)− sin(θ) sin(φ)
= : sin(θ + φ) = cos(θ) sin(φ) + sin(θ) cos(φ)

MAT 1025: 10
Collecting the Formulas
Proposition (Sum and Difference Formulas)For any angles θ and φ,
sin(θ + φ) = sin(θ) cos(φ) + cos(θ) sin(φ)
sin(θ − φ) = sin(θ) cos(φ)− cos(θ) sin(φ)
cos(θ + φ) = cos(θ) cos(φ)− sin(θ) sin(φ)
cos(θ − φ) = cos(θ) cos(φ) + sin(θ) sin(φ)
Example1. sin(π/12) =? Since π/12 = π/3− π/4, then sin(π/12)=sin(π/3− π/4)
Now sin(π/12) = sin(π/3) cos(π/4)− cos(π/3) sin(π/4)
Aha! sin(π/12) =√
32
√2
2− 1
2
√2
2. Or sin(π/12) = 1
2
√6− 1
4
√2

MAT 1025: 11
Supersonic Bombers and Calculators
What Do Bombers and Calculators Have in Common?In the 1950’s, the Air Force needed extremelyfast navigation calculations on board planesthat travelled faster than the speed of sound.Jack Volder was inspired by the trig identities
Kn sin(θ ± φ) = sin(θ)± 2−n cos(θ)
Kn cos(θ ± φ) = cos(θ)± 2−n sin(θ)
where Kn =√1 + tan(φ)2 and tan(φ) = 2−n. Volder called his
technique CORDIC. Volder’s method was later used in the Hewlett-Packard calculators, Intel’s early coprocessors, and Motorola 68000coprocessors used in TI-89, etc. CORDIC forms the basis of trig,exponential, and logarithm calculations in calculators today.

MAT 1025: 12
Combining Trig Functions
Sum of SinesSuppose we have two sine waves with the same frequency added.Can we convert the sum to a single sine function?
y = sin(3θ)− 2 cos(3θ)
Set y = A sin(Bθ + C). The additionformula gives
y = A sin(Bθ) cos(C)+A cos(Bθ) sin(C)
We see: B = 3 , A cos(C) = 1, A sin(C) = −2Since A2cos2(C)+A2sin2(C)=A2, then 12+(−2)2=A2. Aha! A=
√5
Now cos(C)=1/√5 and sin(C)=−2/
√5 implies C = tan−1(−2)
Whencey = sin(3θ)− 2 cos(3θ) =
√5 · sin
(3θ + tan−1(−2)
)

MAT 1025: 13
The General CaseProposition (The General Sum of a Sine and a Cosine)Let ω = a1 sin(bθ) + a2 cos(bθ). Then
ω = A sin(bθ + φ)
with {A =
√a21 + a22
φ = tan−1(a2/a1)
ExampleWrite 3 sin(2t) + 4 cos(2t) as a single sine function.
1. Identify the parameters: a1 = 3, a2 = 4, and b = 2.2. Compute A and φ. Then A =
√32 + 42 = 5 and
φ = tan−1(4/3) ≈ 0.927.3. Fill in the values:
3 sin(2t) + 4 cos(2t) = 5 sin(2t+ 0.927)

MAT 1025: 14
Sums and Differences of Angles
RelabellingThe two addition formulas for sine are
sin(θ + φ) = sin(θ) cos(φ) + cos(θ) sin(φ)
sin(θ − φ) = sin(θ) cos(φ)− cos(θ) sin(φ)
Let u = θ + φ and v = θ − φ. Solving for θ and φ gives
θ = 12(u+ v), φ = 1
2(u− v)
Substitute:
sin(u) = sin(12(u+ v)
)cos(12(u− v)
)+ cos
(12(u+ v)
)sin(12(u− v)
)sin(v) = sin
(12(u+ v)
)cos(12(u− v)
)− cos
(12(u+ v)
)sin(12(u− v)
)Add and subtract to have two new formulas:
sin(u) + sin(v) = 2 sin(12(u+ v)
)cos(12(u− v)
)sin(u)− sin(v) = 2 cos
(12(u+ v)
)sin(12(u− v)
)

MAT 1025: 15
Sums and Differences Formulas CollectedPropositionFor all u and v,
sin(u) + sin(v) = 2 sin(u+v2
)cos(u−v2
)sin(u)− sin(v) = 2 cos
(u+v2
)sin(u−v2
)cos(u) + cos(v) = 2 cos
(u+v2
)cos(u−v2
)cos(u)− cos(v) = −2 sin
(u+v2
)sin(u−v2
)ExampleFind cos(π/12) exactly.
1. Let u = π/4 and v = π/12. Then 12(u+ v) = π/6 and 1
2(u− v) = π/12.
2. So cos(π/4) + cos(π/12) = 2 cos(π/6) cos(π/12)
3. Then√2/2 + cos(π/12) = 2(
√3/2) cos(π/12)
4. Thus cos(π/12) =√2
2(√
3−1)or cos(π/12) = 1
4
√2(√
3 + 1)

MAT 1025: 16
9.3 Trigonometric Models
Electrical PowerMost electrical power in the world isproduced and transmitted as “3 phase.”Three phase power was invented byTesla in the 1880’s. This method ismuch more efficient, producing morepower, but not requiring as large wireas single phase.In 3 phase power, 3 wires each carry electricity, with shifts of 2π/3.[“Household” electricity in the US is single phase 60Hz 120 v (170v peaks).]In 3 phase wiring in the US, the first wire isblack, the second red, and the third blue.The voltages carried are
v1 = 170 sin(60t)
v2 = 170 sin(60t− 2π/3)
v3 = 170 sin(60t− 4π/3) v1 = 170 sin(60t) v2 = 170 sin(60t � 2⇡/3) v3 = 170 sin(60t � 4⇡/3)
MAT 1025: 17
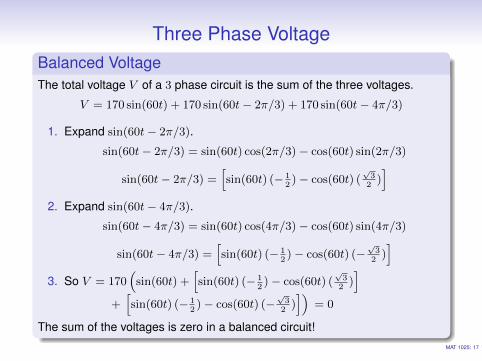
Three Phase VoltageBalanced VoltageThe total voltage V of a 3 phase circuit is the sum of the three voltages.
V = 170 sin(60t) + 170 sin(60t− 2π/3) + 170 sin(60t− 4π/3)
1. Expand sin(60t− 2π/3).
sin(60t− 2π/3) = sin(60t) cos(2π/3)− cos(60t) sin(2π/3)
sin(60t− 2π/3) =[sin(60t) (− 1
2)− cos(60t) (
√3
2)]
2. Expand sin(60t− 4π/3).
sin(60t− 4π/3) = sin(60t) cos(4π/3)− cos(60t) sin(4π/3)
sin(60t− 4π/3) =[sin(60t) (− 1
2)− cos(60t) (−
√32)]
3. So V = 170(sin(60t) +
[sin(60t) (− 1
2)− cos(60t) (
√3
2)]
+[sin(60t) (− 1
2)− cos(60t) (−
√32)])
= 0
The sum of the voltages is zero in a balanced circuit!

MAT 1025: 18
Three Phase Power
PowerThe power P of a 3 phase circuit is proportional to the sum of the squares ofthe three voltages.
P ∝ [170 sin(60t)]2 + [170 sin(60t− 2π/3)]2 + [170 sin(60t− 4π/3)]2
1. Expand sin2(60t− 2π/3).
sin(60t− 2π/3) = sin(60t) cos(2π/3)− cos(60t) sin(2π/3)
sin2(60t− 2π/3) =[14sin2(60t) +
√3
2sin(60t) cos(60t) + 3
4cos2(60t)
]2. Expand sin2(60t− 4π/3).
sin(60t− 4π/3) = sin(60t) cos(4π/3)− cos(60t) sin(4π/3)
sin2(60t− 4π/3) =[14sin2(60t)−
√3
2sin(60t) cos(60t) + 3
4cos2(60t)
]3. So P ∝ 1702
[sin2(60t) + 1
2sin2(60t) + 3
2cos2(60t)
]= 3
2· 1702
The total power is constant!
MAT 1025: 19
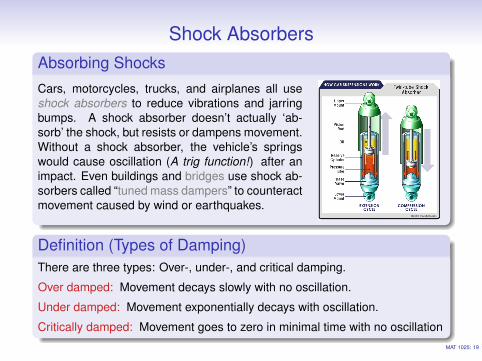
Shock AbsorbersAbsorbing ShocksCars, motorcycles, trucks, and airplanes all useshock absorbers to reduce vibrations and jarringbumps. A shock absorber doesn’t actually ‘ab-sorb’ the shock, but resists or dampens movement.Without a shock absorber, the vehicle’s springswould cause oscillation (A trig function!) after animpact. Even buildings and bridges use shock ab-sorbers called “tuned mass dampers” to counteractmovement caused by wind or earthquakes.
Definition (Types of Damping)There are three types: Over-, under-, and critical damping.
Over damped: Movement decays slowly with no oscillation.
Under damped: Movement exponentially decays with oscillation.
Critically damped: Movement goes to zero in minimal time with no oscillation

MAT 1025: 20
Damped Oscillation
DampingNewton’s Second Law is the basis for damped movement.
Under damped y = 1.25 · 2−x cos(4x+ 0.1)
Critically damped y = 0.5 · 2−x(x− 1.5)
Over damped y = 0.5 · 2−x(x− 1.5)

MAT 1025: 21
Under-Damped OscillationExtra for Experts: Springs
A weight on a spring is equivalent to a shock absorber.The mathematical model of the spring-mass system is
m · a(t) + c · v(t) + k · y(t) = 0
where m is mass, a is acceleration, v is velocity, and yis height; (c and k are positive constants.) If we set unitsso that m and k are 1, then a little bit of calculus givesthe solution
y(t) = Ae−βt[eαt − e−αt
]where α and β depend on the damping factor, and A isa constant. If α is imaginary (then A is, too), convert tosines and cosines using Euler’s identity.
eiat = cos(at) + i sin(at)
e−iat = cos(−at) + i sin(−at) = cos(at)− i sin(at)
So[eαt − e−αt
]= 2i sin(at), giving y ≈ e−bt sin(at): decaying oscillations!