MASTER DEGREE: Industrial Systems Engineering - DIEEC -Departamento de ... · conectores especiales...
20
PAC- Performance-centered Adaptive Curriculum for Employment Needs Programa ERASMUS: Acción Multilateral - 517742-LLP-1-2011-1-BG-ERASMUS-ECUE MASTER DEGREE: Industrial Systems Engineering ASIGNATURA ISE2: Sistemas Automatizados MÓDULO 5: Interfaces y estándares (normas) en los SA TAREA 5-2: INTERFACES DE SISTEMAS MODULARES (CAMAC, VME, VXI, PXI, LXI, etc.) SISTEMAS INDUSTRIALES
Transcript of MASTER DEGREE: Industrial Systems Engineering - DIEEC -Departamento de ... · conectores especiales...

PAC- Performance-centered Adaptive Curriculum for Employment Needs Programa ERASMUS: Acción Multilateral - 517742-LLP-1-2011-1-BG-ERASMUS-ECUE
MASTER DEGREE:
Industrial Systems Engineering
ASIGNATURA ISE2:
Sistemas Automatizados
MÓDULO 5: Interfaces y estándares (normas) en los SA
TAREA 5-2: INTERFACES DE SISTEMAS MODULARES (CAMAC, VME, VXI, PXI, LXI, etc.)
SISTEMAS INDUSTRIALES

Sistemas Automatizados
INTERFACES DE SISTEMAS MODULARES (CAMAC, VME, VXI, PXI, LXI, etc.) SISTEMAS INDUSTRIALES 2
Contenido TAREA 5-: INTERFACES DE SISTEMAS MODULARES ( CAMAC, VME, VXI, PXI, LXI, etc. ) SISTEMAS INDUSTRIALES ....................................................................................................................................................3
1. INTRODUCCIÓN Y OBJETIVOS ...........................................................................................................................3
2. CONTENIDO .....................................................................................................................................................................4
2.1 INTERFACES DE SISTEMAS MODULARES..............................................................................................4
2.2 INTERFACES ESTANDAR Y BMS (SISTEMAS DE BUS MODULARES) ................................5
2.3 INTERFACE EMV ..................................................................................................................................................6
2.4 DIAGRAMA VME .....................................................................................................................................................7
2.5 ESTÁNDAR XVI .......................................................................................................................................................7
2.6 MODULOS Y BUSES ..........................................................................................................................................8
2.7 PROPOSITO DE LOS BUSES ........................................................................................................................9
2.8 TIPOS DE MODULOS .........................................................................................................................................9
2.9 CONFIGURACONES GENERALES VXI .................................................................................................. 10
2.10 ESTANDAR PXI.................................................................................................................................................. 11
2.11 ESTANDAR LXI .................................................................................................................................................. 11
2.12 LXI CARACTERISTICAS PRINCIPALES .................................................................................................. 12
2.13 SOFTWARE PARA LAS NORMAS GIPB .............................................................................................. 14
2.14 VIRTUAL TOOL ................................................................................................................................................ 15
2.15 INDUSTRIAL CONTROL SYSTEMS - ICS ....................................................................................... 16
2.16 SISTEMAS PARA EL CONTROL DE PROCESOS TECNOLOGICOS .................................. 16
2.17 COMPONENTES BASICOS DEL ICS .................................................................................................... 19
3. CONCLUSIONES ......................................................................................................................................................... 20
4. BIBLIOGRAFÍA Y/O REFERENCIAS ................................................................................................................... 20
5. ENLACES DE INTERÉS ............................................................................................................................................ 20
Índice de figuras Figura: 1 Diagrama estructural ......................................................................................................................................7 Figura: 2 Arquitectura del bus VXI .............................................................................................................................8 Figura: 3 Controlador IEEE-488 .................................................................................................................................. 10 Figura: 4 Integrado. VXI bus controlador............................................................................................................ 10 Figura: 5 Controlador MXI ............................................................................................................................................. 10 Figura: 6 Virtual Tool ........................................................................................................................................................ 16 Figura: 7 ICS ............................................................................................................................................................................ 18

Sistemas Automatizados
INTERFACES DE SISTEMAS MODULARES (CAMAC, VME, VXI, PXI, LXI, etc.) SISTEMAS INDUSTRIALES 3
TAREA 5-: INTERFACES DE SISTEMAS MODULARES ( CAMAC, VME, VXI, PXI, LXI, etc. ) SISTEMAS INDUSTRIALES
1. INTRODUCCIÓN Y OBJETIVOS En este documento debemos describir los estándares LXI, IEEE488(GPIB), VXI y PXI. A continuación deberemos definir y comentar el concepto de “Virtual Tool” (herramienta virtual). Se hablara sobre el lenguaje grafico G, y el software LabView. Para finalizar nos centraremos en los sistemas de control ICS y SCADA, comentando sus principales características.

Sistemas Automatizados
INTERFACES DE SISTEMAS MODULARES (CAMAC, VME, VXI, PXI, LXI, etc.) SISTEMAS INDUSTRIALES 4
2. CONTENIDO
2.1 INTERFACES DE SISTEMAS MODULARES Construido sobre la base del llamado principio de integración o
modular. Cada módulo es una unidad independiente funcional y constructiva -
ADC, DAC, amplificador, generador, voltímetro digital, temporizador, la pantalla, la memoria, etc..
Los sistemas están controlados por un módulo - controlador (Uno o
más). Los controladores aseguran relación con el nivel siguiente en la
jerarquía de la AS - sistemas informáticos, que pueden ser unos pocos, organizados en una red informática.
En la mayoría de los casos, los controladores cumplen funciones más
complejas, es decir, que son del tipo "controladores inteligente ". El cambio en los buses es sincronizada por señales estroboscópicas,
que indica el comienzo de un determinado tipo de operación. Se utiliza para transferencias paralelo y serie.
El ancho de bus de dirección y los datos de los buses es 8-32 bits.
La velocidad de cambio es - en САМАС - 1 MHz o 24Mbit / s (3 MB
/ s) a 24 bits.
En los BМS modernos del tipo Multibus II, VME-bus,VXI,PXI, LXI,
Eurobus, FastCAMAC y otros la velocidad supera 100-300Mbit / s. El control es a la vez centralizado y repartido.

Sistemas Automatizados
INTERFACES DE SISTEMAS MODULARES (CAMAC, VME, VXI, PXI, LXI, etc.) SISTEMAS INDUSTRIALES 5
Los sistemas modernos permiten modo multiprocesador, y las tareas se pueden distribuir entre varios procesadores.
Se construye un sistema especial de arbitraje entre los procesadores.
La compatibilidad eléctrica es por niveles lógicos, corrientes y tensiones
a través de los buses de conexión y sus tolerancias. La transmisión de las señales de impulsos rápidas se lleva a cabo por
las largas líneas sincronizadas del tipo cables o pares trenzados y conectores especiales de alta frecuencia.
BМS se utilizan para la EA en grandes plantas industriales, CERN, Batavia, Dubna etc., en la investigación y reactores industriales, etc.
El sistema CAMAC, aunque obsoletas, ha recibido una amplia aplicación, y ha servido de base para la próxima avanzada BMS.
Gran parte del equipamiento acumulado en la norma del sistema CAMAC todavía se utiliza en grandes centros, donde no se requiere alta velocidad.
2.2 INTERFACES ESTANDAR Y BMS (SISTEMAS DE BUS MODULARES)
Estándar CAMAC FASTBUS VME Multibus II
El bus de datos 24 Bits 32 Bits 16/32/ 64 bits 32 bits
Bus de direcciones 24 Bits 32 Bits 24/32 Bits 32 bits
Dirección / bus de datos Independiente Multicine Independiente Independiente
Velocidad de transferencia 3MB / s 70 MB / s 40 MB / s, 80 MB / s (por VME64) 40 MB / s
Protocolo de transferencia Sincrónico Asincrónico Asincrónico Asincrónico
Otros tipos de interfaces estándar: - Eurobus,Futurebus - VXI (VMebus eXtensión para Instrumentation) - PXI (PCI eXtendido Yonterface) - LXI (LAN eXtensiones para Instrumentation) etc.

Sistemas Automatizados
INTERFACES DE SISTEMAS MODULARES (CAMAC, VME, VXI, PXI, LXI, etc.) SISTEMAS INDUSTRIALES 6
2.3 INTERFACE EMV VME bus (Versa Módulo de bus Eurocard) - una interfaz estándar,
desarrollada inicialmente para la familia de microprocesadores 68000 de Motorola, que ha encontrado después aplicaciones con microprocesadores, producido por la empresa Intel etc..
La interfaz VME está estandarizada por el IEC como ANSI / IEEE 1014 -
1987. Físicamente Еuromechanics se utiliza en VME.
Desarrollado en 1981 y estandarizada en 1987, La interfaz VME
encuentra amplia aplicación en la actualidad. Ha servido como base para la interfaz VXI, ampliamente utilizado hoy en día en los sistemas automáticos de medición,.
Características principales:
- Ancho de bus - 32/64 bits; - Dirección / Datos - apartado (para VME32), multiplexado (para
VME64); - Tipo de cambio -asincrónico; - Constructivo - Euromechanics 3U, 6U, 9U; - Número máximo de módulos en el "crate" - 21; - Velocidad de transferencia en la variante de 32 bits - 40 MB/s
(VME32)y 80 MB/s para VME64; - En el modo de transferencia de paquete (cuando después de una
transmisión de una dirección de una serie de transmisiones de datos de seguimiento)la velocidad puede alcanzar 320 MB/s (para VME64).

Sistemas Automatizados
INTERFACES DE SISTEMAS MODULARES (CAMAC, VME, VXI, PXI, LXI, etc.) SISTEMAS INDUSTRIALES 7
2.4 DIAGRAMA VME
Figura: 1 Diagrama estructural
2.5 ESTÁNDAR XVI Una desventaja de las normas descritas es que trabajan sobre todo
con las señales digitales y no son muy adecuadas para la construcción de sistemas de medición precisos para las señales analógicas.
En 1987 una serie de empresas líderes (Hewlett-Packard, Tektronix, Data Systems Colorado, Racal, Wavetek, y más tarde National Instruments) estableció un consorcio y sentó las bases de la norma VXI. Los requisitos en esta norma son:
- Para satisfacer las exigencias de todo tipo de equipos de medición; - Tener módulos con pequeño tamaño y masa; - Para permitir la posibilidad de intercambio de información entre las
herramientas; - Para ser objeto de refresco y la adición de nuevos módulos
independientemente del productor. TAMAÑOS A -> 3,9 x 6,3 in. VME simple altura B -> 9,2 x 6,3 in. VME doble altura C -> 9.2 x 13.4 in. D -> 14,4 x 13,4 in.

Sistemas Automatizados
INTERFACES DE SISTEMAS MODULARES (CAMAC, VME, VXI, PXI, LXI, etc.) SISTEMAS INDUSTRIALES 8
2.6 MODULOS Y BUSES Los módulos con tamaño A comprenden: un bus tipo P1; los módulos con tamaño B y C incluyen además un bus tipo P2; y el módulo con el tamaño D incluye también un bus tipo P3.El papel de estos buses es el siguiente:
- P1 - VME bus de la computadora de: un bus de datos de 16 bits, un bus de direcciones de 24 bits (16MB espacio de dirección), un Multi-master bus de control. Un bus para la interrupción de prioridad y un bus de utilidades;
- P2 - se extiende a los buses VME de: 32 -bits para datos y direcciones
(4 GB espacio de dirección); P2 añade también: un bus 10MHz , un bus TTL y un bus ECL de disparo, un bus local de 12 pin , un bus de suma analógica, un bus para la identificación de los módulos (Id de módulo) y un bus de fuente de suministro;
- P3 - añade: un bus 100MHz tact, un bus ECL de disparo, un bus ECL
de un tipo de estrella, un bus local de 24 pin y un bus de fuente de suministro.
Figura: 2 Arquitectura del bus VXI

Sistemas Automatizados
INTERFACES DE SISTEMAS MODULARES (CAMAC, VME, VXI, PXI, LXI, etc.) SISTEMAS INDUSTRIALES 9
2.7 PROPOSITO DE LOS BUSES
- Bus Reloj -distribuye las frecuencias tact desde el manager de recursos (controlador) en la ranura 0. Contiene 3líneas:10MHz (Clc10), 100 MHz (CLC100) Y una señal de sincronización (SYNC100).
- Bus de disparo -sincroniza la operación de los módulos de medición.
Contiene 8 Líneas y disparo TTL 6Líneas ECL.
- bus local -contiene 12 líneas para conexión local directa entre dos
módulos vecinos sin control redundante del manager.
- Bus analógico -un bus de suma a lo largo de toda la longitud del chasis, cargado con 50 Ohms. Resume las señales de módulos separados para obtener señales complejas con la forma deseada por el usuario.
- Línea para la identificación de los módulos (Id de módulo).Es utilizado
por el controlador para la recuperación de la información de los módulos (ubicación - ranura, dirección, capacidades funcionales, productor, número de serie, etc.)
- Abastecimiento de la energía bus - garantiza tensiones de suministro para las 7 líneas
- Sincronización bus de tipo estrella (Bus STAR) - para la sincronización
simultánea de los módulos seleccionados a partir el controlador de la ranura 0, colocado en el centro de la estrella.
2.8 TIPOS DE MODULOS Dispositivos de registro programables -estos son dispositivos con una
construcción más simple, que no requiere procedimientos de programación complejos, tales como ADC, DAC, los módulos de conmutación, etc.
Dispositivos de instrucciones programables -estos son más complejas dispositivos “inteligentes” de medición en el sistema. Ellos cambian la información con los CSs, así como entre ellos mismos por medio de instrucciones de código ASCII, siendo así mas fácil programarlos y reprogramarlos.
Sistemas Automatizados
INTERFACES DE SISTEMAS MODULARES (CAMAC, VME, VXI, PXI, LXI, etc.) SISTEMAS INDUSTRIALES 10
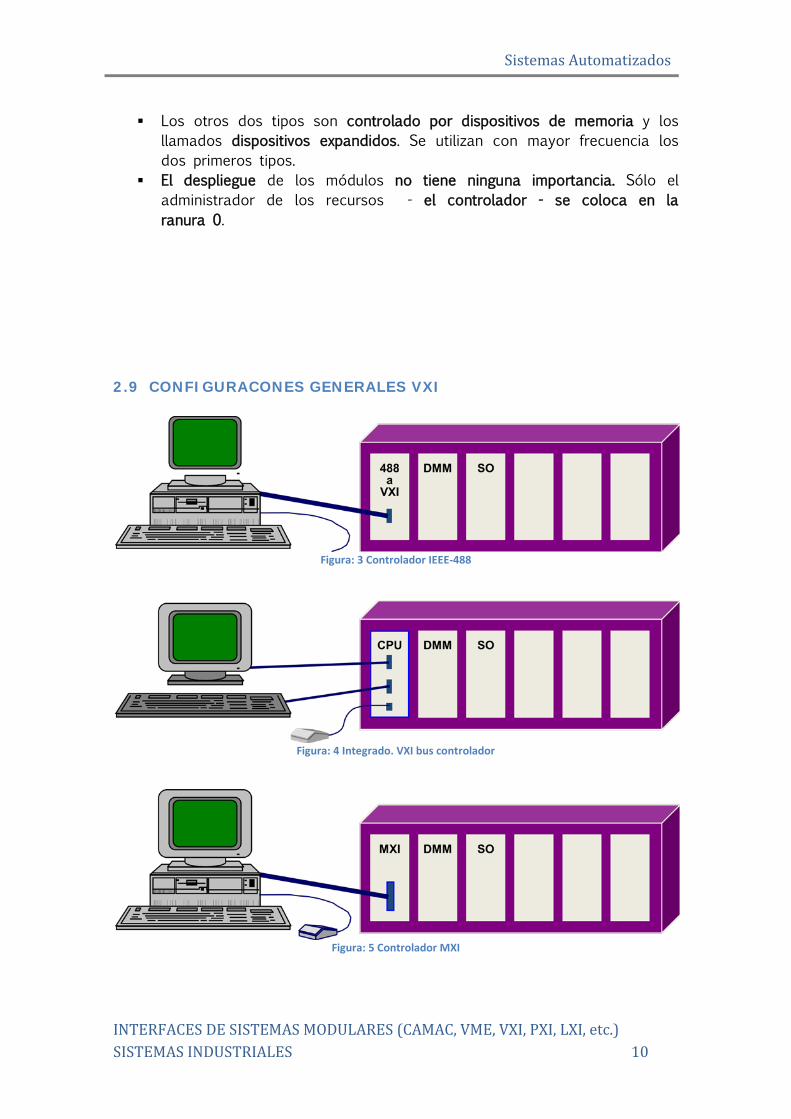
Los otros dos tipos son controlado por dispositivos de memoria y los llamados dispositivos expandidos. Se utilizan con mayor frecuencia los dos primeros tipos.
El despliegue de los módulos no tiene ninguna importancia. Sólo el administrador de los recursos - el controlador - se coloca en la ranura 0.
2.9 CONFIGURACONES GENERALES VXI
Figura: 3 Controlador IEEE-488
Figura: 4 Integrado. VXI bus controlador
Figura: 5 Controlador MXI

Sistemas Automatizados
INTERFACES DE SISTEMAS MODULARES (CAMAC, VME, VXI, PXI, LXI, etc.) SISTEMAS INDUSTRIALES 11
2.10 ESTANDAR PXI Un sistema modular de herramientas basado en el bus PCI (Peripheral
Component Interconnect). Desarrollado en 1997 por la alianza PXISA (Alianza de Sistemas PXI) que consiste en 68 empresas y con la participación activa de la empresa National Instruments.
Sobre 1000 diferente módulos PXI se producen hoy en día. PXI
combina las ventajas de los tiempos modernos y tecnologías de conmutación.
El usuario tiene la posibilidad de diseñar un sistema PXI a su propia
voluntad mediante la selección de todo, es necesario para la realización de una tarea determinada: un controlador, una caja, un ADC, un DAC, entradas-salidas digitales, etc.
PXI ofrece productos para la acumulación de datos con velocidad y
precisión en el rango 60 S / s [muestras por segundo]en precisión de 24 –bit hasta 1 GS / s en exactitud de 8 - bits.
Los dispositivos PXI para diferentes propósitos pueden tener hasta 64
canales para entrada analógica, 2 canales de salida analógica y 32 líneas para las entradas / salidas digitales.
La arquitectura de los PXI está diseñada para las pruebas y medidas en
condiciones industriales severas mejor que un PC estándar. PXI está cerca de las capacidades y de la arquitectura al estándar VXI y por lo tanto no se considerará esta norma en detalle aquí.
2.11 ESTANDAR LXI Desventajas de las interfaces estándar existentes. Nos limitaremos a
hablar de las interfaces estándar ampliamente extendidas IEEE-488 (GPIB), VXI y PXI:
GPIB:
- Baja velocidad de transferencia - Requiere PCB adicional en el PC - Caro E / S tarjetas y cables - Máximo 14 dispositivos

Sistemas Automatizados
INTERFACES DE SISTEMAS MODULARES (CAMAC, VME, VXI, PXI, LXI, etc.) SISTEMAS INDUSTRIALES 12
VXI: - Arquitectura Cara y módulos básicos - Caras no estándar entrada / salida (estándar MXI) - Número limitado de módulos - Requiere un controlador en la ranura 0
PXI:
- Además de los inconvenientes mencionados anteriormente, VXI también tiene :
- Los problemas, relacionados con el tamaño, la potencia y las perturbaciones electromagnéticas
VXI y PXI tiene: limitaciones constructivas y problemas en el uso de varios dispositivos de medición (que a veces imponen utilizar más de un estándar en un sistema de medición), gastos adicionales para la conexión de LAN.
2.12 LXI CARACTERISTICAS PRINCIPALES Entrada / salida de alta velocidad, sobre la base de LAN Estándar
Ethernet IEEE 802.3 para definir conexiones, protocolos, velocidad, direcciones, etc.. Fue presentado en 2004 por Agilent y un consorcio de 40 empresas. Versión 1.0 - en 2005.
- Conexiones - conectores estándar RJ-45;lo apoya la función Auto
MDIX para el reconocimiento automático de la polaridad de la conmutación de la red por cable.
- Protocolos - los dispositivos tienen que soportar los protocolos
TCP,UDP (y IPv4 - protocolo de Internet de trabajo, versión 4, y ahora ya IPv6).
- Velocidad - interfaz Ethernet es recomendada con una velocidad de 1Gbit/s (También se permite 100Mbit/s)y función para el ajuste automático de la velocidad óptima. Las tendencias son 10Gbit / s y mucho más.
- Direcciones - los dispositivos LXI tienen soporte dirección-IP
(definido por el servidor), -dirección-MAC (definido por el fabricante)y nombres de los sistemas de acogida (dada por el usuario).

Sistemas Automatizados
INTERFACES DE SISTEMAS MODULARES (CAMAC, VME, VXI, PXI, LXI, etc.) SISTEMAS INDUSTRIALES 13
- Configuración - los dispositivos tienen que soportar el protocolo
ICMP (protocolo de Internet de trabajo para los mensajes de control), asignación direcciones-IP de acuerdo con el protocolo DHCP, manual y DNS dinámico.
Elimina módulos básicos caros (Controladores de slot 0, GPIB y MXI
tarjetas etc..) Utiliza conexiones a los equipos estándar (y simple).
Factor de forma más pequeño que con GPIB (Con la misma precisión,
resolución y, ancho de banda) Permite el control remoto de herramientas y sistemas de medición.
Identificación automática de los dispositivos de medición, cambiando al
usuario del PC y a la configuración de las interfaces . Compatibilidad con dispositivos de medición, que tiene otros tipos de
interfaces: GPIB, USB, Ethernet / LAN, RS-232 y VXI, producido por diferentes empresas.
Posibilidad de funcionamiento con preferencia por el software de
programación del usuario: Agilent VEE Pro, NI LabVIEW, Microsoft Visual Studio ® etc..
Control confiable de los dispositivos de medición, combinado con una alta eficiencia. Al instalar las librerías IO Suite 140.2 y la Conexión Expert integrada el
problema con el dispositivo de conmutación y la integración del sistema se resuelve rápidamente.
- A los efectos el usuario instala librerías IO Suite en su PC y
cambia los cables a USB, Ethernet / LAN, RS-32 o GPIB dispositivos de. En menos de 15 minutos, el usuario tiene la correcta conexión del sistema, que está listo para trabajar.
Cada dispositivo en la norma LXI debe ser capaz de servir su propia
pagina WEB los datos fundamentales sobre el dispositivo, el número de modelo, el número de serie, la descripción, el nombre del host del sistema, MAC la dirección y el IP dirección.

Sistemas Automatizados
INTERFACES DE SISTEMAS MODULARES (CAMAC, VME, VXI, PXI, LXI, etc.) SISTEMAS INDUSTRIALES 14
Las principales áreas de aplicación de los sistemas, basados en la norma LXI son los complejos de medición automáticos, los sistemas de adquisición y control de los procesos industriales de datos a distancia, la robótica etcétera En conclusión podemos decir: Habiendo heredado la variedad física de los dispositivos desde el GPIB estándar y utilizando pequeños logros modernos de las tecnologías de red, LXI es un estándar universal y barato de alta velocidad, útil para los fines de la AS. La pequeña cantidad de dispositivos, producidos siguiendo esta norma, es algo que cambia con el tiempo y, además, la LXI es muy conveniente para la construcción de sistemas híbridos sobre la base de listas de nodos desde las ampliamente usadas normas GPIB, VXI y PXI.
2.13 SOFTWARE PARA LAS NORMAS GIPB VISA (Virtual Instrument Software Architecture). Un estándar para
interfaces de programación con el propósito de medición y control automático. El entorno es de alto nivel y llama a los controladores de bajo nivel con la correspondiente herramienta de interface (IEEE-488, VXI, PXI etc..). Está contenido en la librería LXI IO Suite 14.2.
Software, basado en lenguajes de alto nivel:
- А) Software para servir a un dispositivo en particular o clase de dispositivos:
- Bench Virtual (National Instruments) - para el control de 6
tipos de herramientas integradas de computación -osciloscopio, multímetro, generador de señales, analizador lógico, etc..
- BenchLink (Hewlett-Packard) - Controla casi las mismas
herramientas, que son autónomas aquí.
- WaveWriter (Tektronix) - Para la realización del control de
los generadores de señales y osciloscopios digitales VXI autónomos o modular.

Sistemas Automatizados
INTERFACES DE SISTEMAS MODULARES (CAMAC, VME, VXI, PXI, LXI, etc.) SISTEMAS INDUSTRIALES 15
- B)Software para el desarrollo de aplicaciones de usuario:
- LabWindows / CVI (National Instruments) - Un paquete de programación, sobre la base de los lenguajes С y С + +. Equipado con más de 500 herramientas de controladores, un conjunto de funciones específicas para el procesamiento de señales, etc.
- ComponentWork (National Instruments) - basado en el
lenguaje Visual Basic.
- HP BASIC (Hewlett-Packard) - Una versión de BASIC,
optimizado para los propósitos de prueba y medición.
- LabView (National Instruments) - Entorno de desarrollo para la programación gráfica, basado en el lenguaje G para la construcción y el control de las herramientas de medición virtuales. Contiene controladores integrados para las interfaces estándar (IEEE-488, VXI, PXI, LXI) (ver el material adicional acerca de LabView).
- HP VEE (Hewlett-Packard) -También gráfica, cerca de la funcionalidad de LabVIEW.
2.14 VIRTUAL TOOL Herramienta virtual, de acuerdo con una definición dada por la empresa National Instruments es:"una combinación de elementos de hardware y software, que bajo el control de un ordenador personal obtiene la funcionalidad de una herramienta clásica de medición de laboratorio". Las figuras muestran un panel frontal y un diagrama de bloques de una herramienta tal.

Sistemas Automatizados
INTERFACES DE SISTEMAS MODULARES (CAMAC, VME, VXI, PXI, LXI, etc.) SISTEMAS INDUSTRIALES 16
Figura: 6 Virtual Tool
Los símbolos en LabView se acercan a los de Electrónic WorkBench/Multisim y hay una evolución de su integración en un entorno unificado.
2.15 INDUSTRIAL CONTROL SYSTEMS - ICS Se utilizan para el control y automatización de procesos tecnológicos. Usualmente se utilizan en la producción de energía eléctrica, sistemas de agua, la industria química, el transporte, así como en instalaciones experimentales y la investigación de los laboratorios nucleares. Independientemente del hecho de que los sistemas ICS tienen
características comunes, se diferencian considerablemente uno de otro. Podemos dividirlos condicionalmente en tres grupos principales:
Control de Supervisión y Adquisición de Datos - SCADA Sistemas de Control Distribuido - DCS
2.16 SISTEMAS PARA EL CONTROL DE PROCESOS TECNOLOGICOS

Sistemas Automatizados
INTERFACES DE SISTEMAS MODULARES (CAMAC, VME, VXI, PXI, LXI, etc.) SISTEMAS INDUSTRIALES 17
Vamos a echar un vistazo a los sistemas SCADA,DCS y PLC y sus arquitecturas y componentes típicos. Las aplicaciones reales de la ICS pueden ser híbridas. Lo que es característico de cada uno de estos sistemas es la siguiente:
- SCADA - sistemas fuertemente distribuidos, utilizado para el
control de objetos distantes geográficamente (hasta miles de kilómetros cuadrados); adquisición de datos centralizada y procesamiento y generación de efectos de control.
- Las áreas típicas: transporte ferroviario, transporte, red eléctrica,
gasoductos, oleoductos, el sistema para la distribución de los recursos hídricos etc.; vigilancia y control centralizados de los objetos y el procesamiento de las alarmas; la información es transmitida a grandes distancias por medio de una red informática.
- Se producen sobre la base de los comandos de control de información recibidos y procesados y son enviados de vuelta a los dispositivos remotos (campo). Los dispositivos de campo realizan acciones locales, tales como la apertura y cierre de las válvulas y los interruptores, la adquisición de datos de los sensores, la vigilancia de las condiciones de alarma en el medio ambiente.
- Se utilizan conexiones globales, sobre la base de las redes de
largo alcance de tipo WAN . Otros sistemas de configuraciones de control, construidas con controladores lógicos programables (Controladores Lógicos Programables - PLC).
- DCS - distribución media o baja; áreas típicas: refinerías de petróleo, estaciones, electro-químicas, plantas farmacéuticas y de alimentación, automoción y otros tipos de producción, Hay por lo general dos niveles.
- En el nivel inferior los sub-sistemas separados, llevan a cabo el
control local de los objetos por los reguladores, apoyan al proceso en los límites, predeterminados por el nivel superior de los valores. Los reguladores son generalmente PID (con, la acción integral y la acción derivativa). Frecuentemente realizado con dispositivos PLC.

Sistemas Automatizados
INTERFACES DE SISTEMAS MODULARES (CAMAC, VME, VXI, PXI, LXI, etc.) SISTEMAS INDUSTRIALES 18
- El ajuste se lleva a cabo por el nivel superior, el cual es responsable de la coordinación de las conexiones entre los sub-sistemas separados, así como para la optimización global de la producción.
- Debido a la relativa proximidad de los subsistemas por separado
redes locales especialmente (LAN) se utilizan por lo general como un sistema de comunicación.
- PLC – Dispositivos МP, control directo de las instalaciones y
procesos industriales. La conexión a los objetos en todos los sistemas SCADA y DSC se realiza por medio de ellos.
- A menudo son los componentes básicos de los sistemas más
pequeños para el control operacional de los sistemas discretos, como las líneas de montaje en la industria.
- Las áreas típicas: automatización de procesos industriales en la producción continua y discreta. Ambos tipos de producción utilizan los mismos sistemas de control, sensores y redes. También hay sistemas híbridos con propiedades características, para ambos tipos.
- A pesar de que se utilizan casi los mismos elementos
estructurales, hay ciertas diferencias entre los sistemas de control separados. Con DSC y PLC los objetos se encuentran en el espacio limitado de una planta y utilizan las tecnologías LAN. Con sistemas DSC y PLC contornos cerrados con retroalimentación se utilizan en mayor medida y el proceso de control de producción es mucho más complejo que con sistemas SCADA.
Figura: 7 ICS
Sistemas Automatizados
INTERFACES DE SISTEMAS MODULARES (CAMAC, VME, VXI, PXI, LXI, etc.) SISTEMAS INDUSTRIALES 19
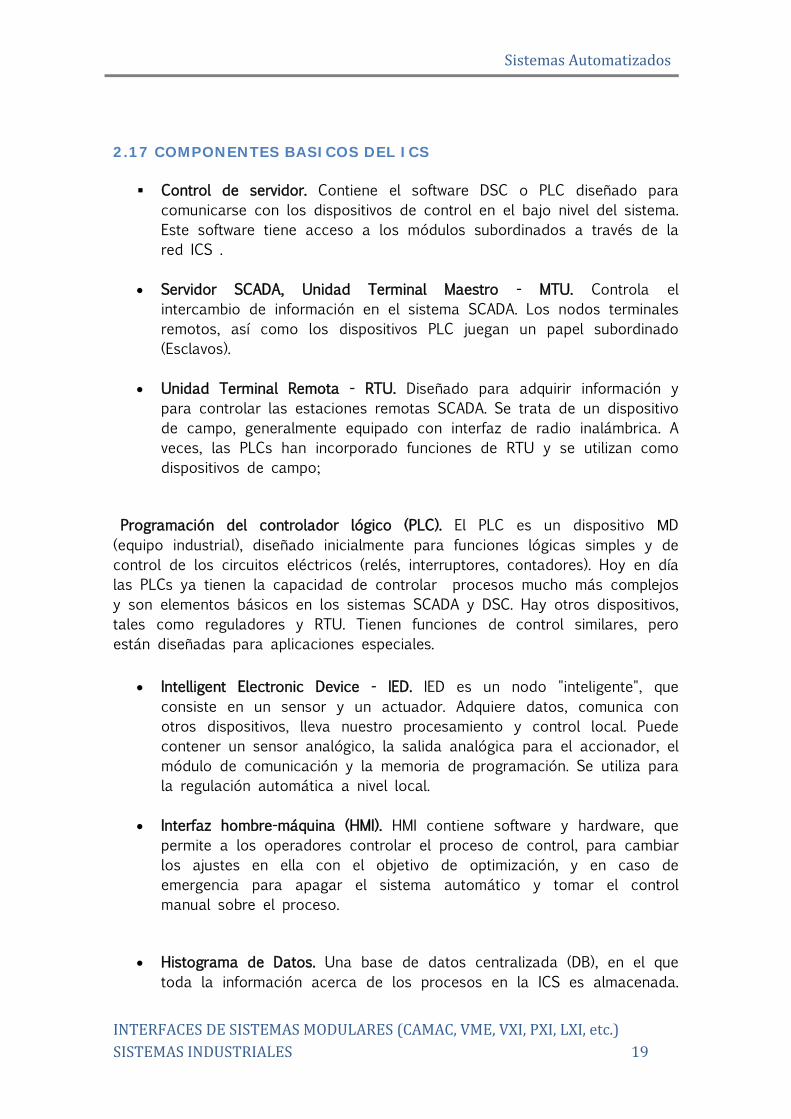
2.17 COMPONENTES BASICOS DEL ICS Control de servidor. Contiene el software DSC o PLC diseñado para
comunicarse con los dispositivos de control en el bajo nivel del sistema. Este software tiene acceso a los módulos subordinados a través de la red ICS .
• Servidor SCADA, Unidad Terminal Maestro - MTU. Controla el
intercambio de información en el sistema SCADA. Los nodos terminales remotos, así como los dispositivos PLC juegan un papel subordinado (Esclavos).
• Unidad Terminal Remota - RTU. Diseñado para adquirir información y
para controlar las estaciones remotas SCADA. Se trata de un dispositivo de campo, generalmente equipado con interfaz de radio inalámbrica. A veces, las PLCs han incorporado funciones de RTU y se utilizan como dispositivos de campo;
Programación del controlador lógico (PLC). El PLC es un dispositivo МD (equipo industrial), diseñado inicialmente para funciones lógicas simples y de control de los circuitos eléctricos (relés, interruptores, contadores). Hoy en día las PLCs ya tienen la capacidad de controlar procesos mucho más complejos y son elementos básicos en los sistemas SCADA y DSC. Hay otros dispositivos, tales como reguladores y RTU. Tienen funciones de control similares, pero están diseñadas para aplicaciones especiales.
• Intelligent Electronic Device - IED. IED es un nodo "inteligente", que consiste en un sensor y un actuador. Adquiere datos, comunica con otros dispositivos, lleva nuestro procesamiento y control local. Puede contener un sensor analógico, la salida analógica para el accionador, el módulo de comunicación y la memoria de programación. Se utiliza para la regulación automática a nivel local.
• Interfaz hombre-máquina (HMI). HMI contiene software y hardware, que
permite a los operadores controlar el proceso de control, para cambiar los ajustes en ella con el objetivo de optimización, y en caso de emergencia para apagar el sistema automático y tomar el control manual sobre el proceso.
• Histograma de Datos. Una base de datos centralizada (DB), en el que
toda la información acerca de los procesos en la ICS es almacenada.

Sistemas Automatizados
INTERFACES DE SISTEMAS MODULARES (CAMAC, VME, VXI, PXI, LXI, etc.) SISTEMAS INDUSTRIALES 20
Se utiliza para diversos análisis, desde informes estadísticos hasta la planificación a nivel corporativo.
Servidor E / S. Un componente de control, responsable de la adquisición, almacenamiento en búfer y el acceso a la información sobre el proceso, procedente de sub-sistemas, tales como PLC, RTU y IED. Físicamente puede estar ubicado en el servidor de control o en un PC independiente. Se comunica con los otros componentes del sistema de control - la HMI y el servidor de control.
3. CONCLUSIONES En este documento podemos ver una primera introducción a los diferentes estándares, así como una comparativa de sus principales características, esquemas de conexión, etc.
4. BIBLIOGRAFÍA Y/O REFERENCIAS www.old.me.gatech.edu http://www.dte.us.es
5. ENLACES DE INTERÉS · www.uned.es . http://www.tu-plovdiv.bg/en/