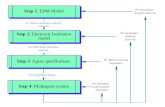
Market-based multiagent system for reconfiguration of shipboard power systems
7
Click here to load reader
Transcript of Market-based multiagent system for reconfiguration of shipboard power systems

Electric Power Systems Research 79 (2009) 550–556
Contents lists available at ScienceDirect
Electric Power Systems Research
journa l homepage: www.e lsev ier .com/ locate /epsr
Market-based multiagent system for reconfiguration ofshipboard power systems
Kai Huanga, Sanjeev K. Srivastavab, David A. Cartesb,∗, Li-Hsiang Sunc
a Schlumberger, Inc., Houston, United Statesb Centre for Advanced Power Systems, Florida State University, Tallahassee, FL 32310, United Statesc LG Electronics, United States
a r t i c l e i n f o
Article history:Received 20 November 2006Accepted 26 June 2008Available online 5 November 2008
Keywords:Reconfiguration
a b s t r a c t
On ships, the electric shipboard power system (SPS) supplies electrical power to critical functions suchas navigation, communication, emergency systems, and in the case of warships, weapon systems. Duringship operation, some parts of the SPS may become unavailable due to damage, fault, or maintenance. Forthe survivability and reliability of ships, it is desired to make the SPS highly reconfigurable. This paperpresents a market-based multiagent system (MAS) for the reconfiguration of radial SPS. Radial SPSs arefound on majority of ships. In the proposed MAS, each agent only communicates with its neighbor agents
Market-based reasoningMultiagent systemS
to make the system work in a fully decentralized manner. The MAS is implemented using Java AgentDevelopment Framework (JADE), which is fully implemented in Java and compliant with Foundationof Intelligent Physical Agents (FIPA). An SPS with two generators and four loads is used for testing the
s show
1
taEfuvcmrft
atdwsa[b
ricfMewaMrptmitpdft
0d
hipboard power systemproposed MAS. The result
. Introduction
The shipboard power system (SPS) supplies electrical power tohe communication, navigation, and other systems on ships. Thebility to reconfigure the SPS is important for ship for missions.specially when part of the SPS is unavailable due to damage,ault, or maintenance, it is critical that the system can shed thennecessary loads and reconfigure the power flow to maintainital functions for survivability. Furthermore, as SPSs become moreomplex, more manpower is required to operate the system. It isore desirable to make the SPS operate in an autonomous manner,
educing required shipboard personnel. Thus, the control systemor an SPS must have the intelligence to automatically reconfigurehe power flow quickly and with adequate configurations.
In recent years, multiagent system (MAS) has been increasinglypplied to solve system reconfiguration problems [1–7]. An MAS isypically a distributed system with components that are indepen-ent problem solving agents and come together to form a coherenthole [9]. Each agent in the MAS is “a computer system that is
ituated in some environment, and that is capable of autonomousction in this environment in order to meet its design objectives”8]. In [5,6], a framework for an MAS to evaluate system vulnera-ility to catastrophic events is discussed. This system also contains
∗ Corresponding author. Tel: +1 850 645 1184; fax: +1 850 645 1534.E-mail address: [email protected] (D.A. Cartes).
iatf
act
378-7796/$ – see front matter © 2008 Elsevier B.V. All rights reserved.oi:10.1016/j.epsr.2008.06.020
the proposed MAS can successfully reconfigure a radial SPS.© 2008 Elsevier B.V. All rights reserved.
econfiguration agents but no implementation or structural details presented. In [1–3,7,10,11], system reconfiguration is done in aentralized manner. For example, in [1], an MAS was put forwardor shipboard chilled water system reconfiguration. However, the
AS used a directory facilitator (DF) to work as a yellow page. Sinceach agent in the system registers on the DF, the system does notork a complete decentralized manner. The approach in [7] usessingle facilitator agent (FAG) to schedule the restoration process.oreover the overall method is suitable only for reconfiguration for
estoration. Note that in an MAS, each software component is sup-osed to be fully autonomous, without being told what to do. Withhis definition, the work can best be categorized as a client server
odel or a system utilizing remote procedure calls. Also the rulesn [7] for the restoration are based on heuristics, which may failo provide solutions if such solutions are not obvious. For exam-le, if an energized bus is unable to provide surplus power to itseenergized neighbor, it is possible for this energized bus agent tourther ask its other neighbors for energy and wheel the power tohe deenergized area. In [10,11], where the reconfiguration is donen a centralized manner, knowledge of the global system topology islso required. More rigid criteria for MAS are discussed in [12]. Cen-ralized control may lead to disadvantages such as single point of
ailure, lack of scalability, and dependency on system topology [13].In this paper, the authors put forward a fully decentralized andutonomous market-based MAS to avoid the disadvantages of theentralized method. The proposed MAS has the following proper-ies.

ystems Research 79 (2009) 550–556 551
1
omrltpttpr
1
mobbaaor
1
capfS
1
tpdttbdn
f(dstaotistIsTmpti
2
cnpcabttnatstflSdiciu
FdIavdbsdo
2
K. Huang et al. / Electric Power S
.1. Load centric
The main objective of a ship is to complete its mission. Inrder to do so the electric loads in the system should meet theission requirements. A successful implementation of a mission
equires that the reconfiguration process should ensure that theoads important for the mission should receive continuous elec-rical power. Therefore, it is important that the reconfigurationrocess should be driven by the demand of loads rather than byhe available generation. The system reconfiguration should followhe requests from the loads. Each load in the system has its ownriority. If multiple requests are waiting for service in a queue, theequest from the load with highest priority will be served first.
.2. Decentralized control
The proposed MAS is a completely decentralized system withinimum social interactions. The agents in the MAS communicate
nly with their direct neighbor agents. An agent does not have prioruilt in global knowledge. Each agent cannot get information fromeyond the agents that have direct connection with it. The maindvantages of such a decentralized implementation are in avertingsingle point of failure and an easily scalable MAS solution. The
ther benefits include lesser communication overhead and a moreobust MAS due to reduced dependencies.
.3. Cost associated with each power source
Each power source in the system has its own cost function. Theost function shows the relationship between the generated powernd the cost of the power generation. The cost of the generatedower is a combination of operating costs, system health, and other
actors. The cost function may change during the operation of thePS.
.4. Service discovery
Since agents do not have a global view to the system, informa-ion must propagate through the MAS so that the agents can takeroper actions based on the latest information. When an agentetects a change in its neighbor agents, it updates the informa-ion in its database, and reacts according to the change. The agenthen propagates the updated information to its remaining neigh-or agents. According to its updated database, an agent can alsoiscover power request or possible power supply (service) in itseighborhood.
The contributions of this paper can be summarized as (1) aully decentralized MAS for the reconfiguration of SPS is presented;2) agents in this MAS use novel market-based heuristics to makeecisions; and (3) an initial implementation of the proposed is pre-ented. There are two main assumptions for the research work inhis paper. The first assumption is that the communication amonggents is robust. The basis for this assumption is the fact thatnboard ships communication systems consist of highly reliableiered redundant communication loops. The second assumptions that the dynamic response in the system does not affect thetability of the system. Electric components are switched in/outhe system, which may cause transient response of the system.n this paper, the authors only consider the steady state of theystem during reconfiguration and ignore the transient response.
his paper is organized as follows. In Section 2, the proposedarket-based MAS is discussed in detail. An implementation of theroposed MAS is presented along with some testing results in Sec-ion 3. Finally, in Section 4 conclusions are drawn and future works discussed.
cbtt
Fig. 1. Market-based MAS with two layers.
. Description of the multiagent system
This section is a description of the market-based MAS, whichonsists of two layers, as shown in Fig. 1. There is an upper commu-ication and computation layer, consisting of agents and connectiveeer-to-peer communications. The SPS is the lower layer with itsontrolled electric components. Each agent in the MAS representsmajor electric component in the SPS, such as a generator, motor,reaker, or bus. The agents can send control signals and receive sta-us information from the electric component that it represents. Ifwo electric components in the power system layer have direct con-ection between them, the corresponding agents in the agent layerre also directly connected by the communication system. Hence,he topology of the MAS is similar to the topology of the powerystem. Agents exchange information with one another throughhe peer-to-peer connections in the upper layer MAS; while powerows through the connection between electric components in thePS. If two agents have direct connection with each other, they areefined as neighboring agents of each other. In the MAS, each agent
s restricted only to communicate with it neighboring agents. Noentral agent is set up in the MAS and no agent in the MAS can getnformation from beyond its neighboring agents. The reason behindsing such an approach was discussed in the previous section.
The proposed agent is implemented in Java Agent DEvelopmentramework (JADE) [14]. JADE is fully implemented in Java, and canevelop multiagent systems in compliance with the Foundation of
ntelligent Physical Agents (FIPA) [16] specifications. In JADE, thegent is defined as a class. In the agent class, some basic agentariables are predefined. The actual functionalities of an agent areefined as “behaviours” of the agents [15]. In the next section aase agent class is discussed. In this base agent class, variables,ummarizing system information, and exchanged among agents areefined. In the subsequent section behaviours that define variousperations performed by an agent are presented.
.1. Agent base class
In the proposed MAS, each agent represents a major electricomponent in the SPS. For example, an SPS may have generators,uses, breakers, and loads. Accordingly, the MAS will have genera-or agents, bus agents, breaker agents, and load agents. The first stepowards building the MAS is to set up a base agent class, which is

552 K. Huang et al. / Electric Power System
ataamofitppt
(faatrEamg
2
rvv
2
pcofltt
2
pncspt
2
pn
2
rl
2
caa
2
c
fTnt
baTcpo
nanni
bgo
b
b
n
(flaaa
Fig. 2. Agent and its interfaces.
general prototype for all types of agents in the MAS. Then specialypes of agents (generator agents, bus agents, breaker agents, etc.)re extended from this base class. If an agent has a connection withnother agent, the connection is defined as an interface. An agentay have more than one interface because it may have more than
ne neighbor agent. Fig. 2 shows an agent, which has four inter-aces. In order to be concise, in later discussions the power flowsn/out to/from an agent through its interface, in the MAS, refers tohe power flows in/out to/from the corresponding electrical com-onent in the SPS. Also, the power capacity of an agent refers to theower capacity of the electric component this agent represents inhe SPS.
Each interface of an agent has a unique media access controlMAC) address for communication. If an agent has only one inter-ace, the MAC address of the interface is defined as the ID of thegent. If an agent has n interfaces, the interfaces are designateds interface 1, interface 2, . . ., interface n, by the agent. The agentakes MAC address of the lowest numbered interface as its ID. Thisesults in each agent in the system having a unique ID number.ach interface has several market-based variables. These variablesre exchanged among the agents, and the agents then use thesearket-based variables to make decisions. These variables for a
iven interface are described as follows.
.1.1. ContractIt is the actual power that flows into the electrical component
epresented by the agent connected to the interface. A positivealue means power flows into the component, while a negativealue means power flows out from the component.
.1.2. Output cost curveIt shows relationship between the cost of the power and the
ower that flows out of the component represented by the agentonnected to the interface. Each interface of an agent has its ownutput cost curve. The maximum possible provided power that canow out though the interface is defined as budget out. The slope ofhe output cost curve is defined as cost out, which is per unit cost ofhe power that flows out from the interface.
.1.3. Input cost curveIt shows relationship between the cost of the power and the
ower that flows into the component represented by the agent con-
ected to the interface. The maximum possible provided power thatan flow in through this interface is defined as budget in. Also thelope of the curve is defined as cost in, which is per unit cost of theower that flows into the component the agent represents throughhe interface.apTir
s Research 79 (2009) 550–556
.1.4. nvload outIt is the extra maximum power that flows out from the com-
onent, represented by the agent connected to the interface, if allonvital loads are turned off in the system.
.1.5. nvload inIt is the extra maximum power that flows into the component,
epresented by the agent connected to the interface, if all nonvitaloads are turned off in the system.
.2. Basic behaviours for the agent network
Each agent has several behaviours, which are described as con-urrent processes running on an agent. Each behaviour representssubset of the capabilities of the agent. Details of each behaviour
re as follows.
.2.1. UpdateBehaviourThis behaviour resides in all agents. It generates the output cost
urve, nvload out, and budget out for each interface of the agent.For an agent that represents a generator, it has only one inter-
ace because a generator is generally connected to a circuit breaker.he budget out of the interface is the capacity of the generator;vload out is 0; and the output cost curve is a curve with slope equalo the per unit power cost of the generator.
For an agent that represents a load, it also has only one interfaceecause a load is generally connected to a cable, which is gener-lly connected to a breaker. The budget out of the interface is 0.he nvload out is 0 if it is a vital load, otherwise it is the powerurrently consumed by this load. Because a load cannot provide out-ut power, the cost for power output is infinite. The correspondingutput cost curve is a vertical line of infinite slope.
When an agent receives budget out and nvload out from itseighboring agent through an interface, it makes the budget innd nvload in of the interface equal to the received budget out andvload out, respectively. When an agent receives contract from itseighboring agent through an interface, it makes the contract of the
nterface equal to the opposite of the received contract.An agent that neither represents a generator nor a load generates
udget out and nvload out of interface i by combining all the bud-et in and nvload in from all the other interfaces except interface in the agent.
Defining x+ as max(x, 0), and x− as min(x, 0), the market variableudget out of interface i is computed using (1):
udget outi =∑j /= i
(budget inj − contract+j
)+ − contract−i
(1)
The nvload out variable is computed using (2):
vload outi =∑j /= i
nvload inj (2)
In order to clearly explain the calculations that are done using1) and (2), a simple example is presented here. Consider an MASor a radial structured power system with two generators and twooads. In the corresponding agent system, there are two generatorgents, two load agents, five breaker agents, and two bus agents,s shown in Fig. 3. In Fig. 3, G1 and G2 are generator agents; L1nd L2 are load agents; Bkr1, Bkr2, Bkr3, Bkr4, and Bkr5 are breaker
gents; and Bus1 and Bus2 are bus agents. It is assumed that theower capacities of G1 and G2 are 400 kW and 300 kW, respectively.he power ratings of L1 and L2 are assumed as 200 kW each; thenitial outputs of G1 and G2 are assumed as 300 kW and 100 kW,espectively. Also the load that L1 represents is assumed as a vital
K. Huang et al. / Electric Power Systems Research 79 (2009) 550–556 553
ll
wlit−g4iBabIga(T3Ibb2
f
pciiowstg
a
y
w
y
Ig
Table 1The interface variables
Interface contract(kW)
budget in(kW)
budget out(kW)
nvload in(kW)
nvload out(kW)
IG1,Bkr1 −300 200 400 200 0IBkr1,G1 300 400 200 0 200IBkr1,Bus1 −300 200 400 200 0IBus1,Bkr1 300 400 200 0 200IBus1,Bkr4 −200 0 400 0 200IBkr4,Bus1 200 400 0 200 0IBkr4,L1 −200 0 500 0 200IL1,Bkr4 200 500 0 200 0IBus1,Bkr3 −100 200 200 200 0IBkr3,Bus1 100 200 200 0 200IBkr3,Bus2 −100 200 200 200 0IBus2,Bkr3 100 200 200 0 200IG2,Bk2 −100 0 300 200 0IBk2,G2 100 300 100 0 200IBk2,Bus2 −100 0 300 200 0IBus2,Bk2 100 300 100 0 200IBus2,Bkr5 −200 100 500 200 0III
ploboschooses the slope of its output cost curve among per unit costs of itsinput interfaces in ascending order. When the power incensementof the output cost curve reaches the budget in of an input interface,the slope of the output cost curve changes to the next higher per
Fig. 3. MAS for the power system with two generators and two loads.
oad, while the load that L2 represents is assumed as a nonvitaload.
In the later discussions IA,B indicates an interface of agent Ahich connects to agent B. By applying the rules discussed ear-
ier in this section, the interface variables can be found for eachnterface on the agent. The power flows out from the genera-or that G1 represents is 300 kW, so the contract of IG1,Bkr1 is300 kW. Since the power capacity of G1 is 400 kW, the bud-et out of IG1,Bkr1 is 400 kW. Then the budget in of IBkr1,G1 is00 kW. The contract of IBkr1,G1 is 300 kW. The contract of IBk1,Bus1
s −300 kW, since the ideal breaker does not consume power.kr1 is neither a generator agent nor a load agent, so (1) ispplied to calculate the budget out of IBk1,Bus1. Hence, for IBk1,Bus1,udget out = (400 − 300+)+ − (−300)− = 400. Then the budget in of
Bus1,Bk1 is 400 kW. Similarly the contract of IL1,Bkr4 is 200 kW, bud-et out at IL1,Bkr4 is 0 kW, contract of IBkr4,L1 is −200 kW, budget int IBk3,L1 is 0 kW, and contract of IBkr4,Bus1 is 200 kW. Then from1) budget out at IBkr4,Bus1 is IBkr4,Bus1 = (0 − (−200)+) − (200)− = 0.herefore, budget in at IBus1,Bkr4 is 0 kW. The contract of IBus1,Bk1 is00 kW, the contract of IBus1,Bkr4 is −200 kW, and the contract of
Bus1,Bkr3 is −100 kW. Then from (1), the budget out at IBus1,Bkr3 isudget out = (400 − 300+)+(0 − (−200)+)+ − (−100)− = 200 kW andudget out at IBus1,Bkr1 is budget out = (200 − (−100+)+ + (0 − (−00)+)+ − (300)− = 200 kW.
Following the similar procedure, all the variables for each inter-ace in the agent system, as shown in Table 1, can be calculated.
For an agent that neither represents a source nor a load, the out-ut cost curve is generated for interface i by combining the input costurves of all interfaces on the agent except interface i. The interface is defined as the output interface and the other interfaces are inputnterfaces. An example is presented here to explain the generationf an output cost curve. Assume that an agent has three interfaces,hich are interface A, interface B, and interface C. Fig. 4(a) and (b)
hows the input cost curves of interface A and interface B, respec-ively. Fig. 4(c) shows the output cost curve of interface C, which isenerated from the input cost curves of interface A and interface B.
The input cost curve in Fig. 4(a) can be expressed by (3), where1 is per unit cost of the power from interface A:
= a1x 0 ≤ x ≤ c1 (3)
Similarly, the input cost curve in Fig. 4(b) is expressed by (4),
here a2 is per unit cost of the power from interface B:= a2x 0 ≤ x ≤ c2 (4)
t is assumed that a1 ≤ a2. The output cost curve starts from the ori-in. First, the slope of the output cost curve is the lowest per unit
Bkr5,Bus2 200 500 100 0 200Bkr5,L2 −200 100 500 200 0L2,Bkr5 200 500 100 0 200
ower cost among the input interfaces. In this case, interface A hasowest per unit power cost, so the output cost curve starts from therigin, and its slope is a1. When the output cost curve reaches theudget out of interface A, which is c1, the slope changes to the sec-nd lowest per unit cost among the input interfaces. In this case,lope of the output cost curve changes to a2. The output interface
Fig. 4. The output cost curve generation.

5 ystem
ucF
y
2
itsuitiw
2
FtRiatsflt
2
icbwreeiatb
2
eaTirsdaiHacbtrf
aaitthBtWArAnwthad
3
Ilabats
isaTbfnarcrolbpsents is manually turned on, reducing its cost to $99. Since tg2 isconnected to bus2, the CostBehaviour of bus2 agent switches thepower supply of load2 from tg1 to tg2. Because load3 and load2 getpower from tg1 and tg2, respectively, the system can split into two
54 K. Huang et al. / Electric Power S
nit cost in the input interfaces. In this case, the generated outputost curve of interface C can be expressed in (5), which is shown inig. 4(c):
={
a1x 0 ≤ x ≤ c1a2(x − c1) + a1c1 c1 ≤ x ≤ c1 + c2
(5)
.2.2. CostBehaviourThis behaviour uses the contract and input cost curve of every
nterface on the agent to redistribute the power flow. It switcheshe power supplies from power source with high cost to the powerource with low cost. For example, it can be seen from Fig. 4 that pernit power cost of the interface A is lower than per unit cost of the
nterface B. If the contracts of interface A and interface B are positive,he CostBehaviour moves part of the contract from interface B tonterface A until the budget out of interface A is reached. In thisay, the MAS can achieve the lowest power cost.
.2.3. RequestBehaviourThis behaviour is to make request to a neighboring agent.
or example, when a generator agent decides that the genera-or needs to reduce the output power or to be turned off, theequestBehaviour generates a request. The request contains some
nformation, including that the budget out in system will decrease,nd the system has to cut off some loads or get more power supplyo balance the power supply and demand. Then the generator agentends the request to its neighboring agent. Priority is also definedor each request: if the request starts from a generator agent or aoad agent that represents a vital load, it has high priority. Requestshat start from other agents have low priorities.
.2.4. HandleRequestBehaviourThis behaviour handles the requests received from neighbor-
ng agents, and responds to such requests by taking some localontrol actions, or forwarding the requests to some of its neigh-oring agents. This behaviour resides in all agents. For example,hen this behaviour on a generator agent receives a request for
eserving some power, it checks if it has enough capacity. If it hasnough capacity to satisfy the reservation, the output of the gen-rator increases and the contract variable of the generator agentnterface is updated. If the generator cannot provide enough power,message that refuses the reservation is generated and sent out to
he neighboring agent. When a request is forwarded to its neigh-oring agent, its priority remains unchanged.
.3. Deadlock
Assuming two agents, agent A and agent B, have connection withach other. When agent A has a request, the RequsetBehaviour ongent A sends out the request to the neighboring agent, agent B.hen agent A locks itself. When an agent is locked, any requestt receives will be put in a queue. The agent does not process theequests in the queue until it receives the response to last request itends out. When agent B receives the request from agent A, the Han-leRequestBehaviour on agent B processes the request and sendsresponse back to agent A. When agent A receives the response,
t unlocks itself and begins to process the request in the queue.owever, if two neighboring agents send requests to each othert the same time, and both of them lock themselves from pro-
essing requests until responses received. Both requests will nevere processed because the agents are waiting for each other forhe response. Also agent A and agent B cannot process any otherequests because they cannot be unlocked without the responserom each other. This is defined as a deadlock.s Research 79 (2009) 550–556
A method is set up to solve the deadlock problem. Assuminggent A sends a request the its neighboring agent. If it receivesrequest from the neighboring agent instead of the response to
ts last request to the neighboring agent, a deadlock happens onhese two agents. Then agent A compares its agent ID number withhe agent ID of its neighboring agent. If the agent ID of agent A isigher than the agent ID of neighboring agent, the HandleRequest-ehaviour of agent A generates a response to the request fromhe neighboring agent, and sends it back to the neighboring agent.
hen the neighboring agent receives to the response from agent, the HandleRequestBehaviour will generate a response to the
equest from agent A, and sends it to agent A. If the agent ID of agentis lower than the agent ID of the neighboring agent, it means the
eighboring agent will send a response to agent A first. So agent Aaits for the response from the neighboring agent. When it receives
he response from the neighboring agent, the HandleRequestBe-aviour generates a response to the request from the neighboringgent, and sends the response to the neighboring agent. Then theeadlock problem can be solved.
. Implementation of agent system and testing results
A test SPS with two generators and four loads is shown in Fig. 5.n Fig. 5, tg1 and tg2 are generator agents; load1, load2, load3, andoad4 are load agents; bkr1, bkr2, bkr3, and bkr4 are load breakergents; tgbkr1 and tgbkr2 are generator breaker agents; bus1, bus2,us3, and bus4 are bus agents; and bus3bkr, bus4bkr, and tgtgbkrre bus breaker agents. A series of events is applied to the systemo test the reconfiguration ability of the proposed. The events arehown in Table 2.
Assuming the initial per unit cost of power for each generators $100. The capacities of both generators are 500 kW. The initialtatus of the system is that all loads and generators are off, andll breakers are open. First, load3 reserves power from the system.he request is sent to bkr3. Because bkr3 is not a power source,kr3 agent forwards the request to bus3. Thereafter the request isorwarded to bus1 through bus3 and bus3bkr. Because tg1 is con-ected to bus1, the request is forwarded to tg1 agent through tgbkr1gent, even though tg2 has the same cost with tg1. When tg1 agenteceives the request, it starts the generator it represents, the per unitost is reduced to $99. The drop of the cost can make the systemeserve power from the running generators as much as possible inrder to avoid the unnecessary startup cost of the generators. Thenoad2 also makes a reservation. This request is still forwarded to tg1ecause of its lower per unit power cost. Then both loads receiveower from the same source. Then the generator that tg2 repre-
Fig. 5. The test SPS.

K. Huang et al. / Electric Power Systems Research 79 (2009) 550–556 555
Table 2Events for the testing SPS
# Event Generators (contract and cost out) Loads in run (contract and vital/nonvital)
1 load3 is on (100 kW, nonvital) tg1 (−100 kW, $99) load3 (100 kW)tg2 (off, $100)
2 load2 is on (100 kW, nonvital) tg1 (−200 kW, $99) load3 (100 kW, nonvital), load2(100 kW, nonvital)tg2 (off, $100)
3 tg2 manually turned on tg1 (−100 kW, $99) load3 (100 kW, nonvital), load2 (100 kW, nonvital)tg2 (−100 kW, $99)
4 load1 is on (100 kW, nonvital) tg1 (−200 kW, $99) load1 (100 kW, nonvital), load2 (100 kW, nonvital), load3 (100 kW, nonvital)tg2 (−100 kW, $99)
5 tg2 reduce to $80 tg1 (0 kW, $99) load1 (100 kW, nonvital), load2 (100 kW, nonvital), load3 (100 kW, nonvital)g2 (−300 kW, $80)
6 tg2 is off for emergency tg1 (−300 kW, $99) load1 (100 kW, nonvital), load2 (100 kW, nonvital), load3 (100 kW, nonvital)tg2 (0 kW, ∞)
7 load4 is on (300 kW, vital) tg1 (−500 kW, $99) load4 (300 kW, vital), load1 (100 kW, nonvital), load3 (100 kW, nonvital), shed load2tg2 (0 kW, ∞)
8 tg2 is ready to be on tg1 (−500 kW, $99) load4 (300 kW, vital), load1 (100 kW, nonvital), load3 (100 kW, nonvital)tg2 (0 kW, $100)
loa(30
loa
shwae
fbt#cooTt
nptwgat
eis
9 load2 is on (200 kW, vital) tg1 (−200 kW, $99)tg2 (−500 kW, $99)
10 tg2 is shut down for emergency again tg1 (−500 kW, $99)
ubsystems by opening tgtgbkr, as shown in Fig. 6. In Fig. 6, the leftalf-subsystem is simulated on one computer, as shown on the top,hile the right half-subsystem is simulated on the other computer,
s shown on the bottom. The two subsystems communicate withach other through Ethernet.
On event #4, load1 is on. It sends a request to bkr1, and bkr1orwards the request to bus1. Since tg1 is the connected to bus1,us1 forwards the request to tg1. The generator represented byg1 increases the power output from 100 kW to 200 kW. On event5, the cost of tg2 is reduced to $80, the system detected thehange and all loads start to receive power from tg2, and thus
verall cost is minimized. To be more specific, the updated costf tg2 is propagated to the bus1 through tgbkr2, bus2, and tgtgbkr.he CostBehaviour of bus1 then switches the power supply fromg1 to tg2. Thus, bus1 reserves power from the tgtgbkr due to theFig. 6. Screen capture of the SPS.
tti2tmntbai
g2ttnf1a
TV
IIII
d1 (100 kW, nonvital), load2 (200 kW, vital), load3 (100 kW, nonvital), load40 kW, vital)
d2 (200 kW, vital), load4 (300 kW, vital), shed load1 and load3
ewly discovered low cost. This request is then forwarded along theath tgtgbkr → bus2 → tgbkr2 → tg2. Once the request is granted,he generator that tg2 represents increase its power output. Mean-hile, bus1 sends request to tg1 to decrease the power output of the
enerator that tg1 represents. Then the power output of the gener-tor that tg2 represents increases to 300 kW, and power output ofhe generator that tg1 represents decreases to 0.
On event #6, the generator that tg2 represents is turned off formergency. The UpdateBehaviour updates the variables for eachnterface. The bus1 detects the budget in from tgtgbkr becomes 0,o it switches its power flow from tg2 to tg1. Then the output ofg1 increases to 300 kW. On event #7, the vital load load4 is to beurned on. The load4 agent checks the budget in and nvload in ofts interface to bkr4. Currently the budget out of the interface is00 kW, which means the system cannot provide enough powero load4. However, the nvload in of the interface is 300 kW, which
eans load4 can get enough power supply from the system if someonvital loads are shed. The load4 sends a request for 300 kW powero bkr4. This request is forwarded to bus2 through bkr4, bus4, andus4bkr. When bus2 receives this request, it checks the budget innd nvload in of it interface. The budget in and nvload in for eachnterface of bus2 are shown in Table 3.
Table 3 shows the only interface of bus2 that has nonzero bud-et in is the interface to tgtgbkr. However the budget in is only00 kW power, which means bus2 cannot get enough power fromgtgbkr to supply load4. The nvload ins of interfaces to bkr2 andgtgbkr are 100 kW and 200 kW, respectively. This means if some
onvital loads are shed, bus2 can at most get 100 kW and 200 kWrom bkr2 and tgtgbkr, respectively. The bus2 sends a request of00 kW to bkr2. The request is forwarded to load2 through bkr2,nd load2 shed the load it represents. Then UpdateBehaviour of
able 3ariables of interfaces on bus2
budget in (kW) nvload in (kW)
bus2,tg2 0 0bus2,bus4bkr 0 0bus2,bkr2 0 100bus2,tgtgbkr 200 200

5 ystem
bbtaFl
cpa
4
wcdiasi
rta
R
[
[
[
[
[[[
KUSr2m
SSiPnhrrs
DUSSCefHt2r
56 K. Huang et al. / Electric Power S
us2 updates the budget ins. The budget in of the interface to tgtg-kr becomes 300 kW. Then bus2 agent sends a request of 300 kW togtgbkr agent. The request is forwarded to tg1 agent through bus1gent, and tgbkr1 agent, and tg1 increases its output to 500 kW.inally load4 can get enough power supply from the system, andoad2 is cut off from the system.
Then on events #8 and #9, tg2 is back on again, and load2hanges into a vital load. Then it successfully reserves 200 kWower. In event #10, tg2 has another emergency stop. The load1nd load3 are shed because they are nonvital loads.
. Conclusion and future work
In this paper, a market-based MAS is proposed to reconfigure SPSith radial structure. In proposed MAS, each agent only communi-
ates with its neighboring agents to make the MAS work in a fullyecentralized manner. Each agent uses behaviours to update the
nformation and fulfill the reconfiguration. An SPS with two gener-tors and four loads is set up to test the proposed MAS. The resulthows the proposed MAS can effectively reconfigure the testing SPSn a decentralized manner.
Currently the proposed MAS can only be applied to radial SPSeconfiguration. In future work, some improvements will be madeo make the MAS work for reconfiguration of SPS with ring structurend mesh structure.
eferences
[1] F. Maturana, R. Staron, K. Hall, Methodologies and tools for intelligentagents in distributed control, IEEE Transactions on Intelligent Systems 20(January–February (1)) (2005) 42–49.
[2] S.K. Srivastava, H. Xiao, K.L. Butler-Purry, Multi-agent system for automatedservice restoration of shipboard power systems, in: Proceedings of the 15thInternational Conference on Computer Applications in Industry and Engineer-ing (CAINE-2002), November, 2002.
[3] F. Maturana, R. Staron, F. Discenzo, D. Scheidt, M. Pekala, J. Bracy, M. Zink, Aninteroperable agent-based control system for survivable shipboard automation,in: ASNE Reconfiguration and Survivability Symposium, February, 2005.
[4] D. Scheidt, C. McCubbin, M. Pekala, M.S. Vick, D. Alger, Intelligent control ofauxiliary ship systems, in: Proceedings of the National Conference on ArtificialIntelligence, July–August, 2002, pp. 913–918.
[5] G.T. Heydt, C.C. Liu, A.G. Phadke, V. Vittal, Solution for the crisis in elec-tric power supply, IEEE Computer Applications in Power 14 (July (3)) (2001)
22–30.[6] C.C. Liu, J. Juhwan, G.T. Heydt, V. Vittal, A.G. Phadke, The strategic power infras-tructure defense (SPID) system. A conceptual design, IEEE Control SystemsMagazine 20 (August (4)) (2000) 40–52.
[7] T. Nagata, H. Sasaki, A multi-agent approach to power system restoration, IEEETransactions on Power Systems 17 (May (2)) (2002) 457–462.
LswHmw
s Research 79 (2009) 550–556
[8] M. Woolderidge, An Introduction to Multiagent Systems, John Wiley & SonsLtd., 2002.
[9] M. D’Inverno, M. Luck, Understanding Agent Systems, Springer Series on AgentTechnology, 2001.
10] S.K. Srivastava, K.L. Butler-Purry, Expert-system method for automaticreconfiguration for restoration of shipboard power systems, IEE Proceed-ings: Generation, Transmission and Distribution 153 (May (3)) (2006)253–260.
11] K.L. Butler-Purry, N.D.R. Sarma, V.R. Prasad, Network reconfiguration for ser-vice restoration in shipboard power distribution systems, IEEE Transactions onPower Systems 16 (November (4)) (2001) 653–661.
12] M. Wooldridge, N.R. Jennings, Pitfalls of agent-oriented development, in: Pro-ceedings of the 2nd International Conference on Autonomous Agents, 1998, pp.385–391.
13] L. Sun, D.A. Cartes, Reconfiguration of shipboard radial power system usingintelligent agents, in: Proceedings of the ASNE Electric Machine TechnologySymposium, 2004.
14] Java Agent Development Framework (JADE), http://jade.tilab.com/.15] G. Caire, Jade Programming for Beginners, http://jade.tilab.com, 2003.16] Foundation for Intelligent Physical Agents (FIPA), http://www.fipa.org/.
ai Huang is with Schlumberger, Inc., Houston, USA. He received his B.S. from Wuhanniversity of Hydraulic and Electrical Engineering, Wuhan, China, and M.S. fromhanghai Jiao Tong University, Shanghai, China, in 2000 and 2003, respectively. Heeceived his Ph.D. degree in Mechanical Engineering from Florida State University in007. His research interest power system reconfiguration, distributed controls, andultiagent systems..
anjeev. K. Srivastava is an assistant scholar scientist in Center of Advanced Powerystem at Florida State University. He received B.E. degree in Electrical Engineeringn 1997 from M.M.M. Engineering College, Gorakhpur, India; and M.Tech. degree inower Systems in 1999 from I.I.T. Delhi, New Delhi, India. He was a Project Engi-eer at Secure Meters Limited, New Delhi, India, from 1999 to 2000. He receivedis Ph.D. degree in Electrical Engineering from Texas A&M University in 2003. Hisesearch interests include expert system application to power systems, reconfigu-ation of navy shipboard power system, and agent technology application to powerystems.
avid A. Cartes is an associate professor of Mechanical Engineering at Florida Stateniversity. He is the interim director of Institute for Energy Systems, Economics andustainability (IESES). He is also the associate director of Center for Advanced Powerystems (CAPS). He joined the Department of Mechanical Engineering at FAMU-FSUollege of Engineering in January 2001, after receiving his Ph.D. in Engineering Sci-nce from Dartmouth College. Dr. Cartes heads the Power Controls Lab at the Centeror Advanced Power Systems. He teaches courses in control and dynamic systems.is research interests include distributed control and reconfigurable systems, real-
ime system identification, and adaptive control. In 1994, Dr. Cartes completed a0-year US Navy career with experience in operation, conversion, overhaul, andepair of complex marine propulsion systems.
i-Hsiang Sun is currently with LG Electronics. He graduated from Columbia Univer-ity with a Ph.D. degree in Electrical Engineering in 2002. From 2002 to 2004, heas a post-doctoral fellow in CAPS contributing to the multiagent system research.is research interests include multiagent systems, service differentiation and QoSechanisms for CSMA/CA networks, evolution of the current 3G cellular systems asell as 4G relay networks.