Mariner 9: Primary Control Net...Ephemeris is a, = 316."85, 8, = 53."01. The corresponding values...
6
FIG. 1. Mariner 9 view of Mars' surface taken from 5400 km range. A few control points are marked and the pixel counting grid can be seen. MERTON E. DAVIES Rand Corporation Santa Monica, Calif. 90406 Mariner 9: Primary Control Net The control net of Mars is being computed photogrammetrically from the television pictures taken by the spacecraft during its active year in orbit around Mars. (Abstract on next page) WE ARE in the midst of what is perhaps man's greatest exploration-the explora- tion of the major bodies of the solar system. This great adventure is a consequence of the conscious efforts of men with vision to ex- ploit the ingenuity of modem engineering to seek out and examine distant worlds. This ancient dream of exploration started soon after the beginning of the space age and now initial contacts have been made with the Moon, Venus, and Mars; Mercury will soon be added and then the excitingly distant outer planetary systems. Like the important explorations of the past, it is difficult to per- ceive adequately the value of those hitherto unknown worlds to future generations, and indeed to the planet Earth. Cartography is the language of explora- tion; it has proved to be the most useful way to visualize a region, to locate landmarks within it, and to estimate distances and di- rections. The coordinate system of the map is the basis for navigation, for describing and communicating specific locations, and for finding known landmarks. From an historical point of view, maps of a region produced at different periods reflect changes to the region with time and also portray the rate of in- creased knowledge of the details of the area. Improvement in the positional data of land- marks can be observed as more refined meas- urements are introduced into the determina- tion of coordinates.
Transcript of Mariner 9: Primary Control Net...Ephemeris is a, = 316."85, 8, = 53."01. The corresponding values...
-
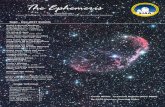
FIG. 1. Mariner 9 view of Mars' surface taken from 5400 km range. A few control points are marked and the pixel counting grid can be seen.
MERTON E . DAVIES Rand Corporation
Santa Monica, Calif. 90406
Mariner 9: Primary Control Net The control net of Mars is being computed photogrammetrically from the television pictures taken by the spacecraft during its active year in orbit around Mars.
(Abstract on next page)
WE ARE in the midst of what is perhaps man's greatest exploration-the explora-
tion of the major bodies of the solar system. This great adventure is a consequence of the conscious efforts of men with vision to ex- ploit the ingenuity of modem engineering to seek out and examine distant worlds. This ancient dream of exploration started soon after the beginning of the space age and now initial contacts have been made with the Moon, Venus, and Mars; Mercury will soon be added and then the excitingly distant outer planetary systems. Like the important explorations of the past, it is difficult to per- ceive adequately the value of those hitherto unknown worlds to future generations, and
indeed to the planet Earth. Cartography is the language of explora-
tion; it has proved to be the most useful way to visualize a region, to locate landmarks within it, and to estimate distances and di- rections. The coordinate system of the map is the basis for navigation, for describing and communicating specific locations, and for finding known landmarks. From an historical point of view, maps of a region produced at different periods reflect changes to the region with time and also portray the rate of in- creased knowledge of the details of the area. Improvement in the positional data of land- marks can be observed as more refined meas- urements are introduced into the determina- tion of coordinates.
-
Unmanned missions are of different types -some are flybys, some are orbiters, and some are landers; they carry scientific instru- ments that are appropriate to the particular mission. A group of experimenters are ap- pointed to the mission to participate in the design, calibration, and use of each instru- ment to assure the maximum return of use- ful data. As a member of the television ex- perimenter team, I should like to describe how a new primary control net of Mars is being computed photogrammetrically from the pictures taken by the Mariner 9 space- craft during its active year in orbit around Mars. First is a discussion of the pictures, their characteristics, and distribution, then an examination of the control points, and finally, a review of the computation of the control net and its status.
the wide-angle lens (the 50-mm focal length lens). The vidicon format was 9.8 mm x 12.5 mm, giving a field of view of 11" x 14", a much narrower field of view than is usual on mapping cameras. The television readout sampled each line 832 times and scanned 700 lines per frame. The characteristics of the wide-angle television camera are sum- marized in Table 1; also listed are the size of an individual sample or pixel (picturc element) and the footprint measured on the object surface with the camera located vari- ous distances normal to this plane surface.
The vidicon camera is a relatively poor in- strument for making photogrammetric reduc- tions because the format is small and the electronic distortions are large. Difficulties in removing these distortions lead to standard u errors of frame measurements of at least 15
ABSTRACT: A planetwide control net of Mars is being derived photo- grammetrically from the television pictures that were returned b y Mariner 9. Such a control net is required b y cartographers to relate the coordinate system to landmarks and topography. Although the pictures cover the entire Mars surface, there are gaps in the low- resolution coverage. The vidicon camera, which produced the photos used in the control net computations, is a poor instrument for photo- grammetric analysis because the electronic distortions are large and the format is small. The coordinate system incorporates a new direction for the spin axis of Mars, a prime meridian defined b y a particular crater (Airy-0) on the surface, and a particular reference spheroid for aero- graphic coordinates. The computation of the primary control net is a continuing project; as o f June 1973 it contained 1645 control points.
THE PICTURES
The Mariner 9 spacecraft contained two television cameras-one with a 50-mm focal- length lens and the other with a 500-mm focal-length lens. All of the pictures used in the control net computations were taken with
Sensor-slow scan vidicon Optics-Zeiss Planar, 50-mm focal length, f/2
stopped down to f/4 Format-9.6 mm x 12.5 mm, 700 x 832 pixels Field of view-11 " x 14"
Normal Distance to Plane Surface
( k m ) Pixel Size
( k m )
0.56 0.84 1.1 1.4 1.7
pm. A useful index of the value of a camera system for photogrammetric computations is found by dividing the format dimensions by the measurement errors. For this vidicon, 9.6/0.015 = 6.4 x 102, 12.5/0.015 = 8.3 x 102.
A few years ago Duane Brown (1968) reported on a study of a hypothetical lunar control network. This elegant study demon- strated the power of the photogrammetric solution of the closed control net to deter- mine the geometric shape of a planetary body. Brown assumed that a dedicated spacecraft was placed in optimum orbit for this mission and that it was instrumented with a 9-in. x 9-in. format photographic film camera. The standard error of the measure- Footprint
(km) ments was assumed to be 3 pm, so that the photogrammetric index was 225/0.003 = 7.5
380 x 500 x 104. The hypothetical camera is thus two 580 750 orders of magnitude better than the Mariner 770 1000 9 vidicon for this type of solution. In addi- 960 X 1250 1150 1500 tion, the Mariner 9 orbit was far from
optimum. Although it is clear that the ac-
-
MARINER 9: PRIMARY CONTROL NET
curacy of the results from Mariner 9 will not approach that of Brown's study, his study was valuable in planning this phase of the Mariner 9 experiment. It is also useful in suggesting methods for obtaining improved results on future missions.
The Mariner 9 spacecraft was in a 12-hour orbit with a 65" inclination; periapsis altitude was 1600 km, initially located at about 2F0 south latitude. Highest priority was assigned to mapping sequences designed to obtain continuous pictures of the entire surface of the planet at maximum resolution with the 50-mm focal length lens camera. The map- ping frames taken near periapsis have too small coverage to be useful in the computa- tions of the control net. The geodesy se- quences contained frames taken from 3000 to 6000 km altitude with considerable overlan.
A ,
and were designed for the computation of the planetwide control net. Unfortunately, full coverage of the planet was not obtained with these pictures, so it is necessary to fill some gaps in coverage using mapping frames.
Figure 1 was taken from a distance of about 5400 km and is typical of these very useful frames. Pictures from this distance cover the southern hemisphere from latitude -30" to -70" except for gaps in longitude at 90" and 270". The south polar region was covered by frames taken from distances of 3000 to 3500 km. Figure 2 is an example of one frame that was taken of the same
region as Fig. 1, thus forming a tie between the sequences. The control points that were measured on these frames have been circled. The measurements are made by counting pixels on frames like these, which have had no geometric processing; the frames have been high-pass filtered and stretched to bring out details, and a special grid is introduced that accentuates every 25 and 100 pixels to aid in counting.
In the northern hemisphere, geodesy se- quences acquired pictures (from a distance of about 3000 km) of the region between the equator and 30" north. North of these to the pole, mapping frames taken from dis- tances of 3000 to 4500 km are used in the control net computations.
The most serious coverage gap exists in the south between latitude -30" and the equator, where the only useful frames are the mapping pictures. These frames have very little overlap and were taken near periapsis at altitudes of less than 2000 km. At this distance, many hundreds of frames are re- quired to obtain full surface coverage. The primary control net thus contains a few bands across this region to tie the northern and southern hemispheres together.
Most of the control points are the centers of craters a few kilometers in diameter. Meas- urements, with an origin at the upper left hand corner, are made by counting pixels on pictures that have had no geometric process-
FIG. 2. Mariner 9 view of Mars' sur taken f~ 3200 lun range. A few control points are marked and the pixel counting grid can be seen.
-
ing. Using the reseau point locations and a program developed by John Kreznar (1973) to remove the geometric distortions, the pixel measurements are converted to coordinates in the focal plane with the origin at the principal point. The exact focal length of the lens is 52.267 mm. The pixel measurements are normally the average of seven measure- ments made by two people and they usually have a standard error of one quarter to one- half pixel. The procedure is to measure the center of a circle that is scribed on acetate and superimposed over the crater rim. Al- though slow and tedious, this procedure is used instead of a com~arator to avoid errors introduced by the image film converter.
The Geodesy/Cartography group of the Mariner 9 TV team established values for the direction of Mars spin axis, the definition of the prime meridian, and the reference sphe- roid to be used with all Mariner 9 carto- graphic products. The justification and rea- sons for these choices are discussed in detail by de Vaucouleurs, et al. (1973).
The axis of rotation of Mars for 1950.0 referenced to the mean equator and equinox
FIG. 3. The prime meridian passes through the center of the small crater Airy-0 that lies within the large crater Airy. Airy can be seen on both the high-resolution and low-resolution frames.
of 1950.0 current use in the American Ephemeris is a, = 316."85, 8 , = 53."01. The corresponding values for the Mariner 9 coordinate system are a, = 317."32, 8 , = 52. " 68.
The prime meridian is defined in the American Ephemeris with respect to the central meridian (longitude 344. "41 ) on Jan- uary 15.5, 1909 Universal Time. The Mariner 9 coordinate system defines the 0" longitude as the meridian that passes through the cen- ter of a particular crater, called Airy-0, lying within the large crater Airy. Airy-0, which has a latitude of about -5." 1, is seen in Figure 3. With the landmark definition of the prime meridian, the control net is used to locate it in astronomical coordinates. Thus the June 1973 control net gave the right ascension of the prime meridian V on Julian date JD as V = 148."24 + 350."892017 x ( ID - 2433282.5).
Aerographic coordinates (in contrast to aerocentric) will be used on all Mariner 9 cartographic products and the reference sphe- roid has an equatorial radius of 3393.4 km and a polar radius of 3375.8 krn. The aero- graphic latitude is defined as the angle be- tween the normal to the reference spheroid through the point and the equatorial plane. The aerocentric latitude is defined as the angle between the radius vector to the point and the equatorial plane.
Pictures taken by vidicon cameras, be- cause of their small format and complex geo- metric distortions, are far from optimum for the establishment of a planetwide control net. Thus the a priori horizontal accuracy of the Mariner 9 control net was expected to be about 10 km, and picture-taking sequences were designed with this in mind. Of course, the seauences were all modified and cut back when ;he giant storm on Mars obscured the planet for more than a month after the space- craft went into orbit, and much of the planned coverage was thereby lost.
Under ideal photogrammetric conditions such as those postulated by Brown (1968), it is possible to solve simultaneously for the latitude, longitude, and planetary radius at each control point and the three coordinates of position and three angles of orientation of the camera stations. Thus there are three variables associated with each control point and six with each picture. Because the Mariner 9 camera system is not of sufficient quality to attempt a purely photogrammetric solution for all of these parameters, the co-
-
MARINER 9: PRIMARY CONTROL NET
ordinates of the camera stations are obtained from the SEDR (Supplementary Experiment Data Record), which is published by the Science Data Team at the Jet Propulsion Laboratory. The errors associated with these coordinates are less than 3 Ian in each co- ordinate (O'Neil 1973). The three-camera orientation angles are treated as variables in all of the Mariner 9 control net computations.
The Mariner 9 radio science experiment team has computed the aerocentric radius of Mars at those locations where the radio beacon on the spacecraft was occulted by the planet (see Kliore, et al. 1972, Kliore, et al. 1973). The occultation points are well dis- tributed over the planetary surface, and the radii measurements are accurate to perhaps 1 km (Kliore, et al. 1973). The aerocentric radii at the control points are determined by interpolating between these measured loca- tions for most of the control net computa- tions. Whereas the radii at a few points are the result of photogrammetric computations of mountain heights, at this time by far the most come from the occultation points. In the future it should be possible to improve the radii estimates at the control point by ex- amining the local topography on a point-by- point basis. The large control net computa- tions solve for only the latitude and longitude of the control points.
The method of simultaneous adjustment of the pictures follows the standard photogram- metric practice of solving observation equa- tions for corrections to the variables and is described in Davies (1971) and Davies and Arthur (1973). The program that is being used at this time for the large computation
is set up to treat as variables the direction of the planet's spin axis, the latitude and longitude of the control points, and the three angles of camera orientation. Another pro- gram can also solve for the radius at the control points; however, at this time it is restricted to fewer total variables.
Two versions of the main program are now being used to solve the large number of normal equations encountered in this prob- lem. The first version is an iterative solution using the method of conjugate gradients; it was adapted and programmed by Richard Clasen of Rand. The second version, written by Richard Berg of the University of Roch- ester is a recursive partitioning program de- veloped by modifying the SURBAT program of DBA to this problem.
The status of the primary control net as it existed during Aug. '72, Nov. '72, Apr. '73, and June '73 has been reported in Davies (1972), Davies and Arthur (1973), and Davies (1973a, b ) . The August 1972 net consisted of 809 points whose coordinates were determined by the successive solution of four blocks. The November 1972 net used five blocks to compute the coordinates of its 1205 points. The April 1973 net (1340 points) and the June 1973 net (1645 points) used single large block solutions. The June 1973 net computations involved 660 frames, 9804 observation equations, and 5270 normal equations in the computations and resulted in a standard error of the residuals was 0.0144 mm.
Figure 4 is a plot of the June 1973 points on a mercator projection; the fairly uniform distribution in the northern hemisphere and
FIG. 4. The equatorial distribution of control points on the June 1973 primary control net of Mars.
-
NORTH POUR REGION
FIG. 5. The polar distribution of control points on the June 1973 primary control net of Mars.
south 30" south latitude can be seen. These northern and southern regions are tied to- gether by six bridges using pictures from mapping sequences a t longitudes 0", 4S0, 135", 18O0, 270°, and 315". Figure 5 shows the June 1973 control points in the northern and southern polar regions.
Work on the Mariner 9 primary control net is continuing. Efforts will be made to reduce the size of the gaps and to improve the estimates of the aerocentric radii a t the control points.
Mariner 9 is just the beginning. The Soviet spacecraft Mars 3 has landed on the surface; more will follow, including the American landers, Viking, in 1976. Eventually even more extensive surface explorations will emerge with the use of automated rovers and highly sophisticated satellites. These ad- vanced missions will establish their own cartographic requirements and take pictures for compiling detailed maps; however, it is likely that the Mariner 9 primary control net will be the only planetwide net for many years to come.
Brown, Duane C. (1968). "A Unified Lunar Control Network," Photogrammetric Engineer- ing, 34:12, December 1968, p. 1272.
Davies, Merton E. ( 1971). Coordinates of Fea- tures on the Mariner 6 and 7 Pictures of Mars, The Rand Corporation, R-896-NASA, October
1971; Icarus, Vol. 17, No. 1, August 1972, pp. 116-167.
Davies, Merton E. ( 1972). Mariner 9 Control Net of Mars: August 1972, The Rand Corporation, R-1122-JPL, October 1972.
Davies, Merton E. (1973a). Mariner 9 Control Net of Mars: April 1973, The Rand Corpora- tion, R-1266-JPL, April 1973.
Davies, Merton E., 1973b). Mariner 9 Control Net of Mars: April 1973, The Rand Corpora- tion, R-1309-JPL, June 1973.
Davies, Merton E., and David W. G. Arthur ( 1973). "Martian Surface Coordinates," J. Geophys. Res., Vol. 78, No. 20, July 10, 1973.
de Vaucouleurs, Gerard, Merton E. Davies, and Francis M. Sturms, Jr. (1973). "The Mariner 9 Areographic Coordinate System," J. Geophys. Res., Vol. 78, No. 20, July 10, 1973.
Kliore, A. J., D. L. Cain, Gunner Fjeldbo, B. L. Seidel, M. J. Sykes, and S. K. Rasool (1972). "The Atmosphere of Mars from Mariner 9 Radio Occultation Measurements," Icarus, Val. 17, No. 2, October 1972, pp. 484-516.
Kliore, A. J., Gunner Fjeldbo, B. L. Seidel, M. J. Sykes, P. M. Woiceshyn (1973). "S-Band Oc- cultation Measurements of the Atmosphere and Topography of Mars with Mariner 9-Extended Mission Coverage of Polar and Intermediate Latitudes," J. Geophys. Res., Vol. 78, No. 20, July 10, 1973.
Kreznar, John ( 1973 ) . User and Programmer Guide to the MM '71 Geometric Calibration and Decalibration Programs, 900-575, Jet Pro- pulsion Laboratory, March 1, 1973.
O'Neil, William J. (1973). Mariher 9 Navigation Final Report, Technical Report, Jet Propulsion Laboratory, to be published.